1. Introduction
Traffic congestion affects not only fuel consumption but also the emissions of conventional fuel-powered vehicles in a traffic network. Due to this fact, a great deal of effort has been made to improve the performance of the traffic signal control system at traffic intersections. Traditionally, traffic signals have been controlled based on fixed or varying schedules called the signal phase and timing (SPaT) [
1]. Thanks to improving computer hardware and the increasing amount of data in the transportation domain, adaptive control systems were developed for traffic signals, such as memetic algorithm for traffic signal optimization [
2] and traffic signal controller based on fuzzy logic [
3]. In contrast to the traditional schedule-based traffic signal control systems, these systems change the traffic signal based on the current traffic condition detected by sensors, such as induction-loop. Recently, advanced sensors, including cameras, radars, and LiDARs, have been considered for traffic monitoring to provide more detailed information such as the number, location, and speed of the vehicles for better-informed decision-making at traffic intersections. Examples include the Sydney coordinated adaptive traffic (SCATS) [
4], split cycle time and the offset optimization technique (SCOOT) [
5], real-time hierarchical optimizing distributed effective system (RHODES) [
6], experiences with adaptive signal control in Germany [
7], and the smart traffic congestion control system [
8]. These adaptive control systems optimize the SPaT in real time to minimize delay and stops of the vehicles at each intersection. Among those advanced sensors, camera-based systems can provide detailed information on traffic conditions in a cost-effective manner due to the relatively inexpensive camera modules.
Camera-based object detection is widely used in many fields, including autonomous driving, transportation, robotics, and even medicine. Based on images captured by the camera hardware, various features of objects can be identified using an object detection algorithm. One of the well-known object detection algorithms is you only look once (YOLO) [
9,
10,
11,
12]. YOLO uses a unique convolutional neural network, darknet framework, to detect objects as a regression problem and provides class probabilities for the detected objects in a single run. Therefore, detected objects are shown in a rectangular box to inform the type, size, and location of the objects. Compared with other algorithms such as single shot multi-box detector (SSD) [
13], Faster-RCNN [
14], Mask-RCNN [
15], and CenterNet [
16], YOLO features high accuracy and fast computational speed. When applied to transportation, YOLO can draw a bounding box for every detected vehicle in an image allowing estimation of the position of multiple vehicles in the scene.
Through coordinate transformation using camera calibration data [
17], a vehicle’s position obtained by YOLO in the two-dimensional (2D) image coordinates can be converted into three-dimensional (3D) world coordinates. Real-time counting of vehicles in each traffic lane based on the vehicles’ position can be used by the traffic signal control system to prioritize multiple approaching lanes and determine which lane will reach the next green light based on the number of vehicles and their total waiting time. However, even though the bounding box of a vehicle drawn by YOLO provides a vehicle’s position with a relatively high degree of accuracy in the image coordinates, there is a geometrical issue that causes a significant error between the center of a vehicle’s bounding box and the real center of the vehicle in the world coordinates. This error caused by the camera view angles leads to an inaccurate vehicle localization and count in each lane. Therefore, to reduce the vehicle localization error, a new method to correct the center of vehicles detected by YOLO has been developed and is presented in this paper.
This paper is organized as follows. After related works are presented, the camera calibration method is presented to calculate the transformation matrix between the 2D image coordinates and the 3D world coordinates. Then, a regression model-based approach is presented to correct the geometrical error of the vehicle center location. Finally, validation results are presented for single vehicles in still images and multiple vehicles in live-streamed videos.
2. Related Works
Various methods have been developed to accurately locate vehicles at a traffic intersection by using advanced sensors, such as LiDARs, together with state-of-the-art machine learning algorithms. For example, a method for road sign detection using a LiDAR has been reported to improve vehicle localization in an HD map [
18]. Another method utilizes points clouds from LiDARs and an Euler region proposal algorithm to generate region proposals for each vehicle in the point clouds [
19]. These methods can improve detection accuracy, which in turn can have significant applications in autonomous driving and other advanced driver assistance systems. Despite their wide applications, LiDARs do have some drawbacks, including their high cost and maintenance requirements, as well as the challenge of accurately classifying certain types of vehicles, such as motorcycles, sedans, and trucks.
Other methods utilize cameras as sensors with deep learning algorithms. For example, a study used several deep learning methods and a novel data association algorithm to estimate and monitor traffic flow on a highway in real time [
20]. By providing accurate and reliable traffic flow estimation, the system can aid in effective traffic management and help reduce congestion on highways. However, the use of the complex system requires high computational power, which may limit its application in certain scenarios. Another study used a combination of stereo vision and deep learning to reconstruct accurate vehicle locations in a traffic scene [
21]. The system utilizes multiple cameras to capture a video of a traffic scene, then the video frames are processed by a deep neural network to construct 3D bounding boxes around the detected vehicles. The system determines vehicle location and speed by using the 3D bounding boxes and camera calibration data. It also classifies the vehicle types based on the size of the 3D bounding box. Their results showed that the average vehicle localization error was 1.81 m using a differential GPS as a reference and 1.68 m using a drone as a reference. Additionally, other studies employed computer vision algorithms to estimate and monitor traffic flow using multiple cameras, which could improve traffic safety and efficiency in a cost-effective manner [
22,
23].
In this paper, a new simple and effective approach is presented to reduce the localization error of the vehicle detected by YOLO for traffic control applications. The proposed method uses two different types of regression models to estimate the distance between the center of a vehicle’s bounding box and the center of the vehicle’s projection on the road. This estimated distance is then used to correct the vehicle localization error. In comparison to other previous methods, this new regression model-based approach can correct the vehicle localization error faster with an acceptable accuracy using a single camera.
The overall workflow of the proposed vehicle localization method is shown in
Figure 1. In the figure, it is shown that the camera calibration is conducted, and error correction models are developed in the training and computing phase. The resulting models are then applied to the input traffic video in the vehicle localization and counting phase to evaluate the effectiveness of the proposed method.
3. Vehicle Detection and Localization
3.1. Vehicle Detection Algorithm
For the vehicle detection using a camera installed on a traffic light pole, an image-based object detection algorithm is utilized. Object detection algorithms based on a convolutional neural network such as YOLO are known for their high accuracy and real-time performance. The fourth version of YOLO, YOLOv4, uses darknet convolutional neural networks as the backbone, spatial pyramid pooling (SPP) [
24] and path aggregation network (PANet) [
25] as the neck, and YOLOv3 as the head. Many features are used to improve the accuracy while maintaining real-time performance in YOLOv4. For the current transportation application, it is only necessary to detect motorcycles, cars, and trucks, and thus only those categories are turned on among various types of objects that YOLOv4 can detect. To determine the physical locations of the detected vehicles, 2D coordinates of the center of the bounding box of each vehicle in the image should be transformed into the corresponding 3D world coordinates. This coordinate transformation can be performed by using matrices obtained from the camera calibration.
3.2. Camera Calibration
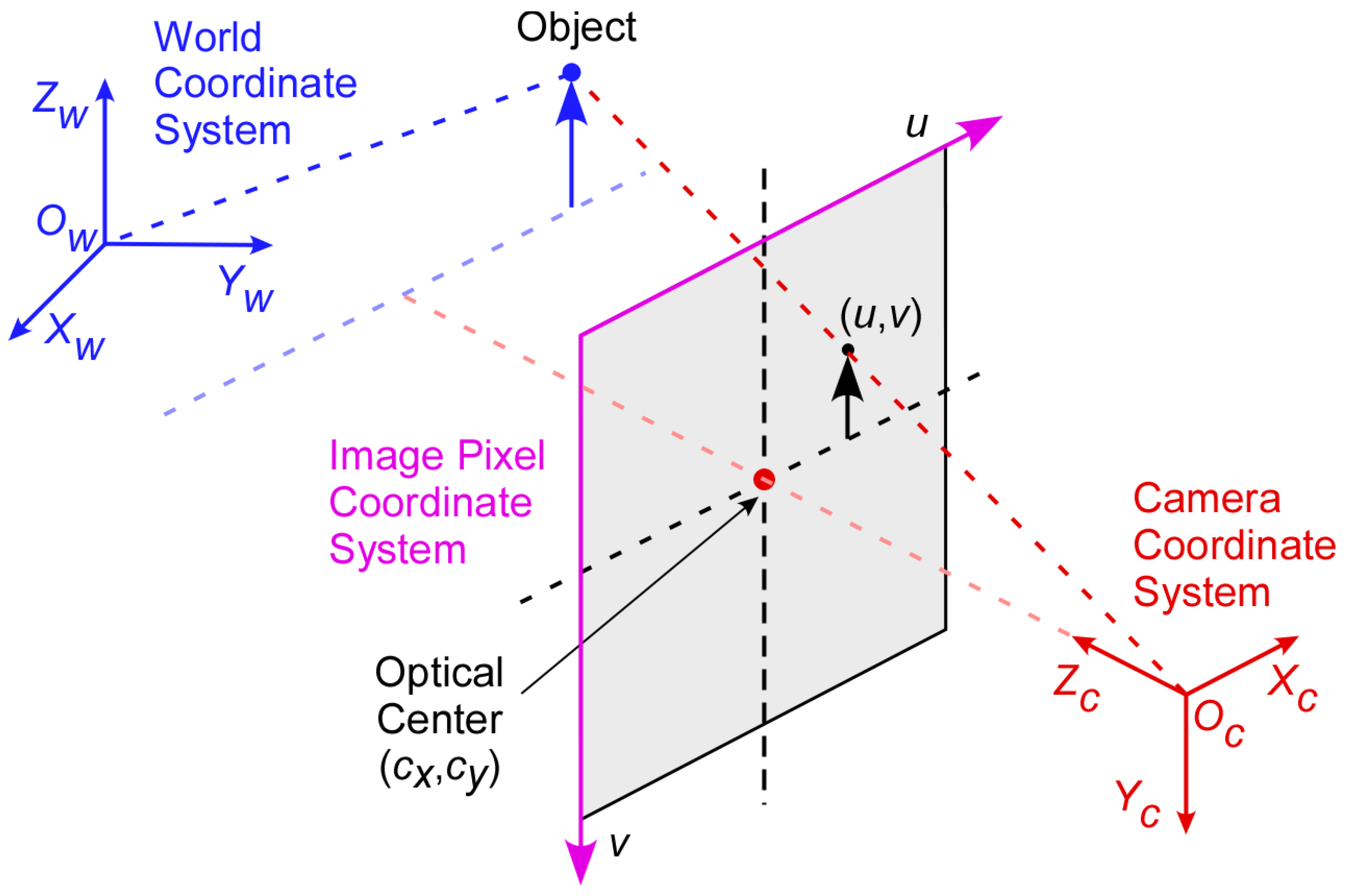
Camera calibration is the process of determining coordinate transformation matrices. For this purpose, three coordinate systems are used: 2D image pixel, 3D camera, and 3D world coordinate systems, as shown in
Figure 2. For the origin of the 3D world coordinate system, the location of the camera fixed on the traffic light pole is used. Based on a previous work [
26,
27], the coordinate transformation matrix,
, is defined as follows:
where the
is used to transform the 3D camera coordinate system to the 2D image coordinate system and the
transforms the 3D world coordinate system to the 3D camera coordinate system. Through the camera calibration, a mathematical relationship between the 2D image pixel coordinates and its corresponding 3D world coordinates of detected vehicles can be determined.
3.2.1. Transformation between Three Coordinates
The 3D world coordinates can be transformed into the 3D camera coordinates using the extrinsic matrix
based on the following relationship:
where
and
represent the camera coordinates and the world coordinates, respectively. In the extrinsic matrix,
is a 3 × 3 rotation matrix, and
is a 3 × 1 translation vector. In this application, the height coordinate,
, in the world coordinates is set to 0, assuming that the road is level and all vehicles have the same vertical coordinates. However, for the completeness of the equation derivation, the variable,
, is carried over until the last stage where 0 is assigned to the variable.
The 3D camera coordinates can be transformed into the 2D image coordinates using an intrinsic matrix,
defined by:
where
is the focal length, and
are the coordinates of the optical center of the camera, which may not coincide with the center of the image coordinate system. The relationship between the 2D image coordinates and the 3D camera coordinates can be represented by:
where
is a pixel location in the image pixel coordinate system and
is a scaling factor.
Finally, the transformation between the 2D image coordinates and the 3D world coordinates can be obtained by combining Equations (2) and (4) as:
where the 3 × 4 transformation matrix
is defined by:
With an expansion of the matrix,
, Equation (5) can be rewritten as:
Expanding Equation (7) produces the following three equations:
If there are
different points in the 3D world coordinates with their corresponding 2D projections, moving all terms to the left-hand side for the 3
different equations will lead to the following homogeneous linear system [
28]:
The homogeneous linear equation can be solved by using the singular value decomposition (SVD) method [
29]. When tested with different numbers of data points in a small-scale setup, the homogeneous equation produced the best result with sixteen data points. Therefore, sixteen points are used in this research to determine the coordinate transformation matrix.
3.2.2. QR Decomposition
It is challenging to measure physical locations of the data points on the road from the origin of the world coordinate system fixed on a traffic pole. The solution is to select a new coordinate origin from which it is relatively easier to measure physical locations of the data points, and then translate the coordinate origin from the newly chosen point to the traffic pole using QR decomposition [
30]. A combination of the camera calibration result based on the new origin of the world coordinates, and the distance between the new origin and the traffic pole produces a result that is roughly equal to the one based on the traffic pole as the origin. The QR decomposition-based method provides a convenient and inexpensive way to measure the world coordinates of the data points with an acceptable error.
The QR factorization is a decomposition of a matrix into an orthogonal matrix
and an upper triangular matrix
. First, the transformation matrix
is rewritten as follows:
The translation matrix,
, can also be represented by:
where
is a 3 × 1 vector representing the camera’s position in the world coordinates. By introducing a 3 × 3 matrix
defined as:
the following equation can be obtained:
Finally, from Equations (11) and (12), the following relationships can be obtained:
In this way, the intrinsic matrix , rotation matrix , and translation matrix can all be obtained. The translation matrix, , represents the distance between the new coordinate origin and the traffic pole. Each camera has its own associated transformation matrix, which does not change as long as the camera’s view angles are fixed. Therefore, camera calibration needs to be performed only once for each camera.
4. Error Correction for Vehicle Center Location
There is an inherent geometrical error in obtaining the vehicle center location in the world coordinates from the corresponding 2D image coordinates that YOLO provides. When YOLO detects a vehicle, it draws a bounding box around the vehicle and the center of the bounding box is regarded as the center of the vehicle. However, due to the angled view of vehicles by the traffic camera, the center of the bounding box does not match with the true center of the vehicle on the road. This error can be explained using the vehicle shown in
Figure 3, where the center of the bounding box is shown as a blue dot and the true center of the vehicle is shown as a yellow dot. Note that the yellow dot is at the intersection of the diagonals of a parallelogram obtained by projecting the vehicle onto the ground.
Since the error in locating the vehicle center depends on the vehicle size and the camera view angles, it is possible to develop a regression model that relates the error to the vehicle size and the camera view angles. In this research, two different types of regression models are utilized: a linear regression function and a nonlinear neural network.
4.1. Error in Vehicle Center Localization
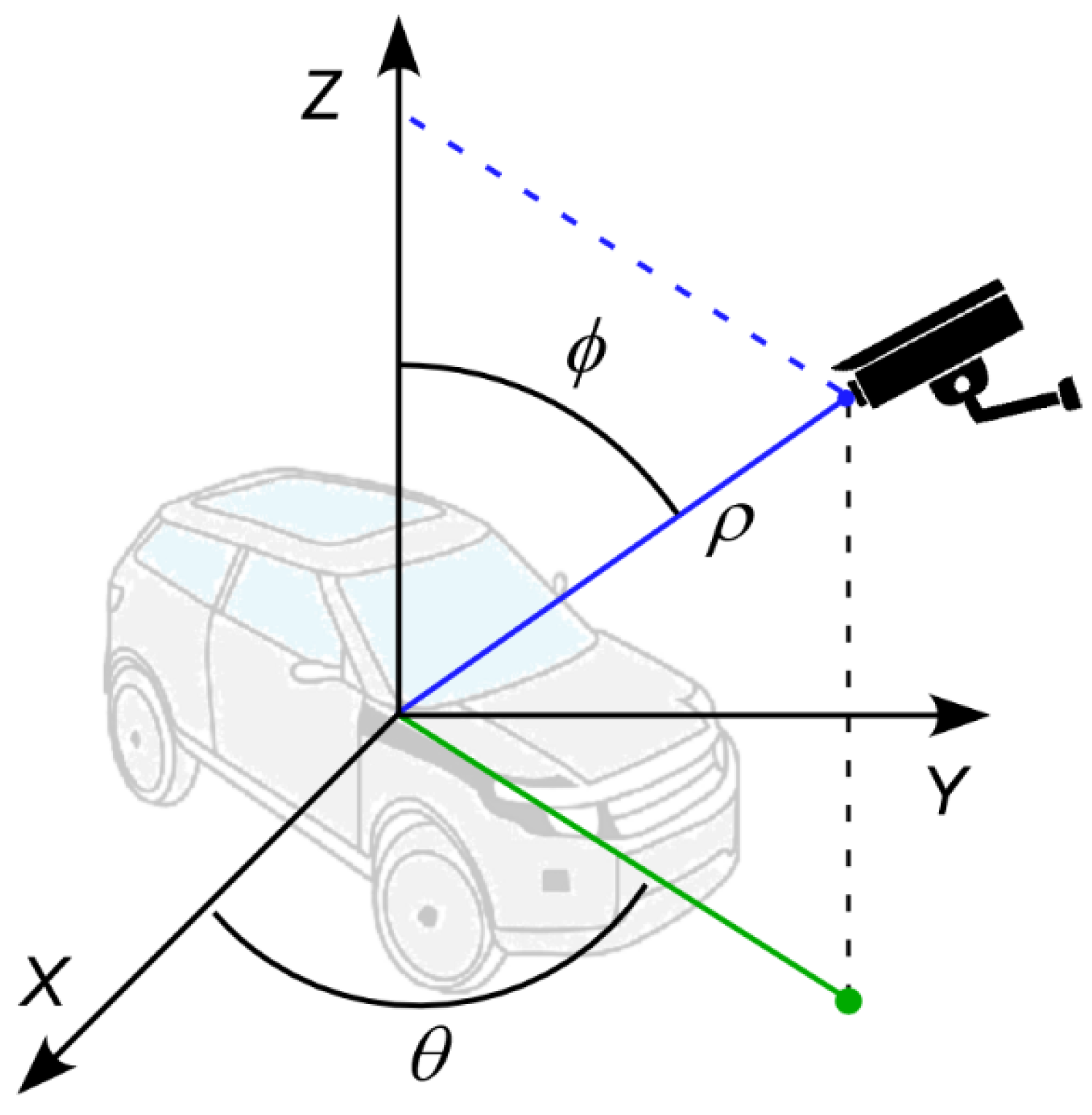
Vehicles at different locations seen by a fixed camera appear in different sizes and orientations. In the spherical coordinate system, a vehicle can be represented by two observation angles,
and 𝜙, and distance,
, as shown in
Figure 4 [
31]. The error of the vehicle center location caused by the varying view angles and distance can be represented and thus corrected by these variables.
For the training of a regression model, the input features of the training dataset may include the height and width of the vehicle bounding box, distance between the vehicle and the camera, and two observation angles from the camera. While the distance between the vehicle and the camera is difficult to measure in a real situation, the distance is related to the size of the bounding box. More specifically, the size of the bounding box decreases as the distance between the vehicle and the camera increases. Therefore, the distance, , may be ignored as a dependent variable. Additionally, the azimuth angle, , is related to the width of the bounding box without noticeably changing the height of the bounding box. Therefore, the azimuth angle, , can be ignored as a dependent variable as well. As a result, only the vehicle size represented by the bounding box height and width, and the elevation angle, 𝜙, can be meaningful input features to the regression model.
4.2. Regression Models for Vehicle Center Error Correction
To obtain the training dataset, various images of 3D rectangular prisms are generated by using MATLAB and then 2D bounding boxes are drawn around the 3D rectangular prisms as shown in
Figure 5. In the figure, the distance between the center of the bounding box and the projection of the center of the rectangular prism onto the bottom plate is used as the output of the regression model.
For the regression model to cover a large number of vehicles of different sizes, the prediction output needs to be normalized with the size of the bounding box before model training. Thus, the prediction output of the regression model is defined by:
where
is a normalized value between 0 and 1, and
is the vertical distance between the blue and yellow dots in the rectangular prism image shown in
Figure 5. The error can be calculated from Equation (16) as:
For the linear regression model, it would appear that the elevation angle, 𝜙, does not noticeably affect the output. Thus, only the height and width of the bounding box are used as the input features. The linear hypothesis,
, and the error function,
, can be expressed as:
where
are model parameters,
are input features,
is the number of examples, and
is the output
from Equation (17).
For the nonlinear neural network model, the input features include the height and width of the bounding box and the elevation angle, 𝜙. Here, the elevation angle, 𝜙, can be calculated by using the QR decomposition in the camera calibration step. A simple neural network consisting of two hidden layers is used with 10 nodes in the first hidden layer and five nodes in the second hidden layer.
5. Validation of Vehicle Localization Error Correction
The proposed vehicle localization error correction method is evaluated quantitatively in both static and dynamic scenarios. Additionally, the accuracy in vehicle counting is assessed using two different traffic scenarios, one with light traffic volume and the other with heavy traffic volume. The results of these evaluations demonstrate the effectiveness of the method in improving the accuracy of vehicle localization and counting.
5.1. Three-Dimensional Position Reconstruction
Once the vehicle location in the 2D image coordinates,
, has been detected by YOLO and corrected by one of the regression models, the next step is to convert the vehicle’s location to the 3D world coordinates using the transformation matrix,
. Based on Equation (7), the vehicle location in the 3D world coordinates can be obtained by:
Assuming that the road surface is even, and the vehicle center is on the road, i.e.,
, Equation (20) can be simplified as:
where
is the vehicle’s location in the world coordinates.
5.2. Vehicle Localization Performance
5.2.1. Vehicle Localization in Static Condition
The performance of the vehicle center error method was quantitatively evaluated using two different types of vehicles with various orientations and distances as shown in
Figure 6. To diversify the vehicle orientation in the images, three different horizontal locations (left, middle, and right), and two different heights (high and low) are used for the camera location. Additionally, the distance between the camera and the vehicles ranges from 30 to 80 m. A total of 24 still images are used to validate the proposed method in a static situation. In the figure, the centers of the vehicles obtained by bounding boxes are shown as blue dots, and the vehicle centers corrected by a linear regression model and a neural network are shown as red dots and green dots, respectively. The differences between the centers of the bounding boxes and the corrected vehicle centers can be clearly seen in the figure. However, since the vehicle localization error in the horizontal
-coordinate is negligibly small compared to that in the vertical
-coordinate in the image coordinates, the error in the
-coordinate is ignored and only the error in the
-coordinate is considered in this research.
The errors in localizing vehicle centers with and without error correction models are quantitatively measured and presented in
Table 1. The true vehicle centers on the ground are determined by converting the intersection of the diagonals connecting the four corners of each vehicle into the 3D coordinates. The percent improvements are also calculated by comparing the errors before and after applying the regression models and shown in the parentheses. From the table, it can be seen that the neural network model shows slightly better results than the linear regression model mostly for the Sedan. On the contrary, the linear model shows slightly better results for the SUV. The slightly different results are deemed to be related to the different aspect ratios of the vehicles and the different learning capabilities of the regression models.
5.2.2. Vehicle Localization in Dynamic Condition
The performance of the vehicle localization method at a traffic intersection was quantitatively evaluated using a differential GPS as the reference. A vehicle equipped with a high-accuracy differential GPS receiver was driven through an intersection as shown in
Figure 7. The figure depicts the moving vehicle, along with its location in the world coordinates. In the figure, the yellow dot represents the vehicle location measured by the differential GPS, the blue dot represents the center of bounding box without center correction, and the red dot represents the vehicle center corrected by a linear regression model. For the analysis, over one hundred data points were collected in each lane.
A comparison was made between the vehicle localization errors with respect to differential GPS measurement with and without vehicle center correction, and the results are shown in
Table 2. The error was calculated by using the Euclidean distance, with the longitudinal error accounting for around 80–90% and lateral error accounting for just 10–20% in the world coordinates. Since the results obtained by the linear regression and neural network models are very similar, only the results obtained by the linear regression model are presented in the table. In the table, it is clearly seen that the errors corrected by the linear regression model are much smaller than those without any correction with an average improvement of 71.32%.
This result is better than the previously reported results by Lu et al. [
21], which was described in
Section 2. Their results showed that the average localization error was 1.81 m using a differential GPS as a reference and 1.68 m using a drone as a reference. In contrast to their approach where multiple cameras were used to generate 3D bounding boxes, the new approach presented in this paper achieved more accurate vehicle localization using only a single camera system and 2D bounding boxes. As a result, our method allows for faster processing speeds and greater efficiency.
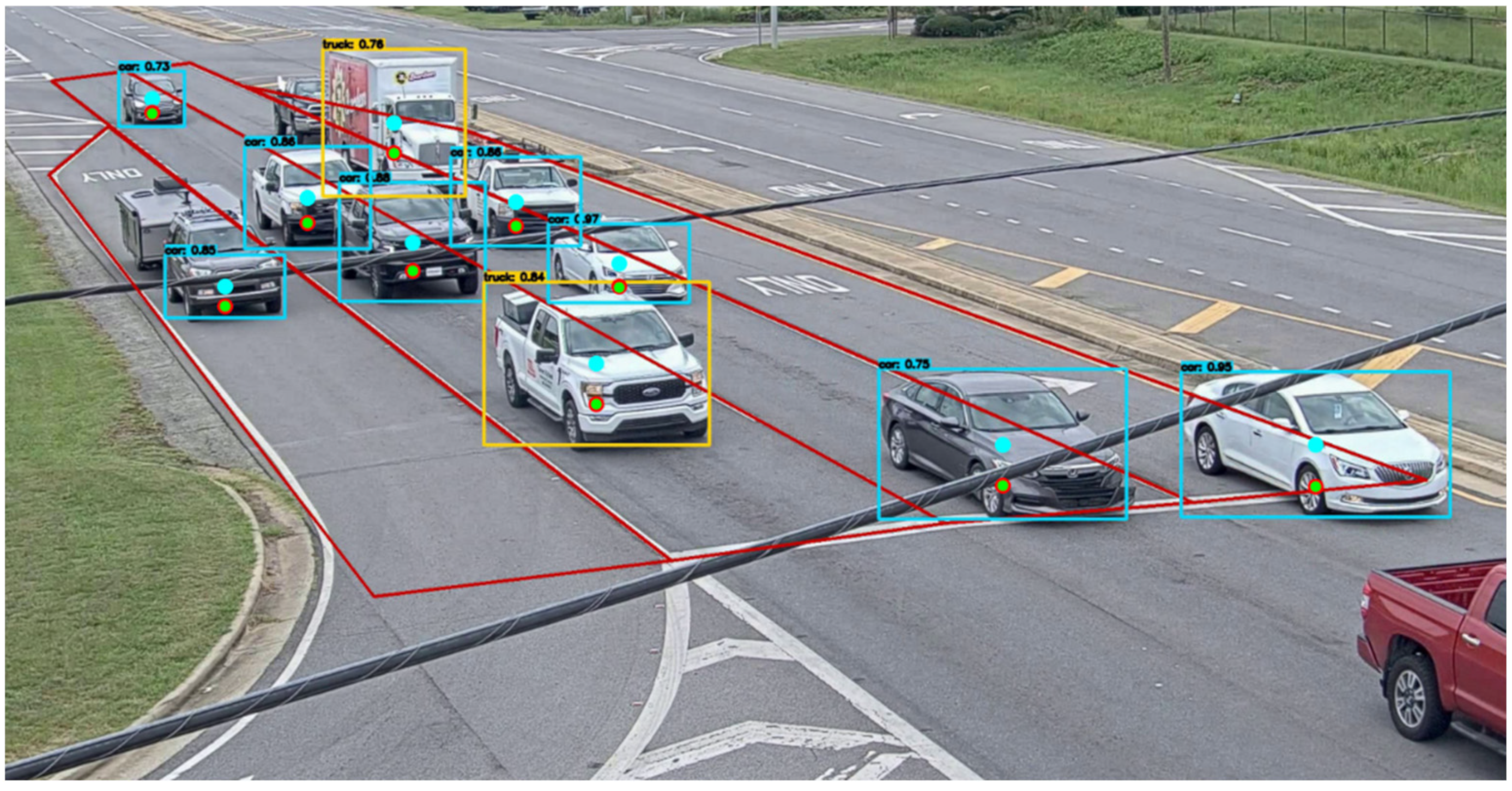
5.3. Vehicle Counting Performance
The proposed vehicle center error correction method was applied to a real-time traffic video captured by a camera as shown in
Figure 8. The video camera was installed on a traffic signal pole at an intersection where the speed limit is 55 mph. The area of the camera image where vehicles are detected was pre-defined to only include the lanes that lead toward the intersection. This was performed to ensure that only vehicles moving in the direction of the camera are detected and taken into consideration. In the figure, the blue, red, and green dots within each bounding box represent the center of the bounding box, corrected center by the linear regression model, and corrected center by the neural network model, respectively. Due to the proximity of the vehicle centers corrected by the linear regression and the neural network models, the distance between those centers in the image coordinates is only a few pixels, making the red and green dots look almost identical.
Using the corrected center locations of the vehicles in the image coordinates as input, a more accurate location of the vehicles in the 3D world coordinates can be obtained by the coordinate transformation. Therefore, obtained vehicle centers are plotted along with the corresponding centers of bounding boxes in the 3D world coordinates, as shown in
Figure 9. In the figure, it can be seen that significant improvements have been achieved in the determination of the vehicle locations in the world coordinates, which allows a more accurate count of vehicles in each lane. Based on the accurate location measurement, it would also be possible to calculate the distance between vehicles and the speed of each vehicle if necessary. As seen from the single vehicle cases, the results from the linear regression and the neural network models are very close, and thus the red and green dots appear almost identical.
To quantitatively evaluate the accuracy of the proposed approach in vehicle counting for each lane, the vehicle localization error correction models were applied to two video clips captured by the traffic camera in two different traffic conditions: light and heavy. Each video was one minute long and captured at the rate of 30 frames per second, which generates a total of 1800 still images. Using a 2080Ti NVIDIA graphics card, a Python code combining YOLO and the error correction algorithms could process high-resolution images of 3072 × 1728 pixels at the rate of 30 frames per second in real time. To calculate the accuracy, all 1800 still images were manually checked to count the number of vehicles present in each lane, which was used as the ground truth. The accuracies in the vehicle count with and without the vehicle localization error correction method are shown in
Table 3.
When no error correction method was applied, the accuracy in the vehicle count was the lowest for the left lane and gradually increased toward the right lane. The accuracy for the left lane is especially low compared to other lanes. This is due to the large azimuth angle,
, and the elevation angle, 𝜙, for the vehicles in the left lane. As a result, a good portion of the vehicles in the left lane are assigned out of the lane resulting in a very low accuracy. This trend improves toward the right lane as the view angles change favorably. Additionally, the overall accuracy with the error correction method was slightly lower for the heavy traffic scenario than for the light traffic scenario. This is due to the fact that more vehicles are obscured by other vehicles in front, avoiding detection in the heavy traffic condition. With the error correction method, the overall accuracy improved significantly. Since the results obtained with the two different regression models did not show much difference, their results are combined and represented by a single value for each case. The accuracy of the proposed approach ranging from 73.95% to 98.35% over the two different scenarios is comparable to the accuracy ranging from 70.58% to 99.63% obtained by a previously reported method in [
20]. However, the simplicity of the proposed approach provides added value when compared to the existing complex system.
6. Conclusions
In this paper, a simple and effective approach was presented to compensate for an error in localizing a vehicle center detected by a single traffic camera and processed by an object detection algorithm called YOLO. The error between the center of a vehicle’s bounding box and the real center of the vehicle projected on the road in image coordinates was corrected by using two different types of regression models: a linear regression model and a neural network. The models were trained with rectangular prism images generated at different distances and view angles, and the calculated center error was used as the output of the models. When tested with stationary vehicles in a parking lot and a moving vehicle at a traffic intersection, the results showed that the overall errors were reduced by around 85% and 71%, respectively. This approach was also applied to a live-streamed traffic video to quantitatively evaluate the accuracy of the proposed method in counting the number of vehicles in each approaching lane. The error correction method improved the accuracy of vehicle counting, with results ranging from 73% to 98%. In contrast, the basic vehicle detection algorithm YOLO had lower accuracies, ranging from 5% to 94%. The presented approach can be used to determine accurate traffic conditions at traffic intersections so that an adaptive traffic control system can make an optimal decision based on the correct number of vehicles in each approaching lane.
In this research, all tests were conducted on sunny days with adequate illumination. However, poor weather or low light conditions can negatively impact the accuracy of the object detection algorithm, YOLO, resulting in incorrect bounding box placement for vehicle detection. To improve vehicle detection performance under such conditions, additional sensors such as radar or LiDAR can be incorporated, and a sensor fusion algorithm can be applied. These enhancements can improve vehicle detection and minimize the negative impact of low illumination on the proposed vehicle localization method.
Author Contributions
Conceptualization, H.-S.Y.; methodology, S.L.; software, S.L.; validation, S.L. and H.-S.Y.; formal analysis, S.L.; investigation, S.L.; resources, H.-S.Y.; data curation, S.L.; writing—original draft preparation, S.L.; writing—review and editing, H.-S.Y.; visualization, S.L.; supervision, H.-S.Y.; project administration, H.-S.Y.; funding acquisition, H.-S.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by U.S. Department of Energy, grant number DE-EE0009210.
Data Availability Statement
Data sharing not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Seredynski, M.; Khadraoui, D.; Viti, F. Signal phase and timing (SPaT) for cooperative public transport priority measures. In Proceedings of the 22nd ITS World Congress, Bordeaux, France, 5–9 October 2015. [Google Scholar]
- Sabar, N.R.; Kieu, L.M.; Chung, E.; Tsubota, T.; de Almeida, P.E.M. A memetic algorithm for real world multi-intersection traffic signal optimisation problems. Eng. Appl. Artif. Intell. 2017, 63, 45–53. [Google Scholar] [CrossRef]
- Niittymaki, J.; Kononen, V. Traffic Signal Controller Based on Fuzzy Logic. In Proceedings of the SMC 2000 Conference Proceedings. 2000 IEEE International Conference on Systems, Man and Cybernetics. ‘Cybernetics Evolving to Systems, Humans, Organizations, and Their Complex Interactions’, Nashville, TN, USA, 8–11 October 2000. [Google Scholar]
- Lowrie, P. SCATS—A Traffic Responsive Method of Controlling Urban Traffic; Roads & Traffic Authority NSW: Darlinghurst, Australia, 1990.
- Hunt, P.; Robertson, D.I.; Bretherton, R.D.; Royle, M.C. The SCOOT on-line traffic signal optimisation technique. Traffic Eng. Control 1982, 23, 4. [Google Scholar]
- Mirchandani, P.; Head, L. A real-time traffic signal control system: Architecture, algorithms, and analysis. Transp. Res. Part C Emerg. Technol. 2001, 9, 415–432. [Google Scholar] [CrossRef]
- Brilon, W.; Wietholt, T. Experiences with adaptive signal control in Germany. Transp. Res. Rec. 2013, 2356, 9–16. [Google Scholar] [CrossRef]
- Atta, A.; Abbas, S.; Khan, M.A.; Ahmed, G.; Farooq, U. An adaptive approach: Smart traffic congestion control system. J. King Saud Univ.-Comput. Inf. Sci. 2020, 32, 1012–1019. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HA, USA, 21–26 July 2017. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single Shot Multibox Detector. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. In Proceedings of the NIPS 2015: Proceedings of the 28th International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; MIT Press: Cambridge, MA, USA; Volume 1, pp. 91–99. [Google Scholar]
- He, K. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Duan, K.; Bai, S.; Xie, L.; Qi, H.; Huang, Q.; Tian, Q. Centernet: Keypoint triplets for object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Gruen, A.; Huang, T.S. Calibration and Orientation of Cameras in Computer Vision; Springer Science & Business Media: Berlin, Germany, 2001; Volume 34. [Google Scholar]
- Ghallabi, F.; El-Haj-Shhade, G.; Mittet, M.A.; Nashashibi, F. LiDAR-Based road signs detection For Vehicle Localization in an HD Map. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019. [Google Scholar]
- Simony, M.; Milzy, S.; Amendey, K.; Gross, H.M. Complex-YOLO: An Euler-region-proposal for real-time 3D object detection on point clouds. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Azimjonov, J.; Özmen, A. A real-time vehicle detection and a novel vehicle tracking systems for estimating and monitoring traffic flow on highways. Adv. Eng. Inform. 2021, 50, 101393. [Google Scholar] [CrossRef]
- Lu, D.; Jammula, V.C.; Como, S.; Wishart, J.; Chen, Y.; Yang, Y. CAROM-Vehicle Localization and Traffic Scene Reconstruction from Monocular Cameras on Road Infrastructures. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Ge, L.; Dan, D.; Li, H. An accurate and robust monitoring method of full-bridge traffic load distribution based on YOLO-v3 machine vision. Struct. Control Health Monit. 2020, 27, e2636. [Google Scholar] [CrossRef]
- Mandal, V.; Mussah, A.R.; Jin, P.; Adu-Gyamfi, Y. Artificial Intelligence-Enabled Traffic Monitoring System. Sustainability 2020, 12, 9177. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Gremban, K.D.; Thorpe, C.E.; Kanade, T. Geometric camera calibration using systems of linear equations. In Proceedings of the IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988. [Google Scholar]
- Veeraraghavan, H.; Masoud, O.; Papanikolopoulos, N.P. Computer vision algorithms for intersection monitoring. IEEE Trans. Intell. Transp. Syst. 2003, 4, 78–89. [Google Scholar] [CrossRef]
- Callier, F.M.; Desoer, C.A. Linear System Theory; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Baker, K. Singular value decomposition tutorial. Ohio State Univ. 2005, 24. [Google Scholar]
- Gander, W. Algorithms for the QR decomposition. Res. Rep. 1980, 80, 1251–1268. [Google Scholar]
- Riley, K.F.; Hobson, M.P.; Bence, S.J. Mathematical methods for physics and engineering. Am. Assoc. Phys. Teach. 1999, 67, 165–169. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}