


Application of Gaussian Mixtures in a Multimodal Kalman Filter to Estimate the State of a Nonlinearly Moving System Using Sparse Inaccurate Measurements in a Cellular Radio Network



Abstract
1. Introduction
2. Related Work and CDR Data Limitations
3. Methodology
3.1. Kalman Filter
3.2. Smoothing
3.3. Switching Kalman Filter with GMM Cell Coverage Enhancement
4. Evaluation and Results
4.1. Synthetic CDR Dataset Based on CDR’17
4.2. Evaluation
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- del Peral-Rosado, J.A.; Raulefs, R.; López-Salcedo, J.A.; Seco-Granados, G. Survey of Cellular Mobile Radio Localization Methods: From 1G to 5G. IEEE Commun. Surv. Tutorials 2018, 20, 1124–1148. [Google Scholar] [CrossRef]
- Zufiria, P.J.; Pastor-Escuredo, D.; Úbeda-Medina, L.; Hernandez-Medina, M.A.; Barriales-Valbuena, I.; Morales, A.J.; Jacques, D.C.; Nkwambi, W.; Diop, M.B.; Quinn, J.; et al. Identifying seasonal mobility profiles from anonymized and aggregated mobile phone data. Application in food security. PLoS ONE 2018, 13, e0195714. [Google Scholar] [CrossRef] [PubMed]
- Lamp, M.L.; Ahas, R.; Tiru, M.; Saluveer, E.; Aasa, A. Mobile positioning data in emergency management: Measuring the Impact of street riots and political confrontation on incoming tourism. In Principle and Application Progress in Location-Based Services; Springer: Berlin/Heidelberg, Germany, 2014; pp. 295–314. [Google Scholar]
- Ricciato, F.; Widhalm, P.; Pantisano, F.; Craglia, M. Beyond the “single-operator, CDR-only” paradigm: An interoperable framework for mobile phone network data analyses and population density estimation. Pervasive Mob. Comput. 2017, 35, 65–82. [Google Scholar] [CrossRef]
- Grantz, K.H.; Meredith, H.R.; Cummings, D.A.; Metcalf, C.J.E.; Grenfell, B.T.; Giles, J.R.; Mehta, S.; Solomon, S.; Labrique, A.; Kishore, N.; et al. The use of mobile phone data to inform analysis of COVID-19 pandemic epidemiology. Nat. Commun. 2020, 11, 4961. [Google Scholar] [CrossRef] [PubMed]
- Becker, R.A.; Caceres, R.; Hanson, K.; Loh, J.M.; Urbanek, S.; Varshavsky, A.; Volinsky, C. A tale of one city: Using cellular network data for urban planning. IEEE Pervasive Comput. 2011, 10, 18–26. [Google Scholar] [CrossRef]
- Pourmoradnasseri, M.; Khoshkhah, K.; Lind, A.; Hadachi, A. OD-matrix extraction based on trajectory reconstruction from mobile data. In Proceedings of the 2019 International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Barcelona, Spain, 21–23 October 2019; pp. 1–8. [Google Scholar]
- Hadachi, A.; Pourmoradnasseri, M.; Khoshkhah, K. Unveiling large-scale commuting patterns based on mobile phone cellular network data. J. Transp. Geogr. 2020, 89, 102871. [Google Scholar] [CrossRef]
- Dong, H.; Wu, M.; Ding, X.; Chu, L.; Jia, L.; Qin, Y.; Zhou, X. Traffic zone division based on big data from mobile phone base stations. Transp. Res. Part C Emerg. Technol. 2015, 58, 278–291. [Google Scholar] [CrossRef]
- Hasegawa, Y.; Sekimoto, Y.; Kashiyama, T.; Kanasugi, H. Transportation melting pot Dhaka: Road-link based traffic volume estimation from sparse CDR data. In Proceedings of the International Conference on IoT in Urban Space, Rome, Italy, 27–28 October 2014; ICST: Brussels, Belgium, 2014. [Google Scholar]
- Forghani, M.; Karimipour, F.; Claramunt, C. From cellular positioning data to trajectories: Steps towards a more accurate mobility exploration. Transp. Res. Part C Emerg. Technol. 2020, 117, 102666. [Google Scholar] [CrossRef]
- Isaacman, S.; Becker, R.; Cáceres, R.; Kobourov, S.; Martonosi, M.; Rowland, J.; Varshavsky, A. Identifying important places in people’s lives from cellular network data. In Proceedings of the Pervasive Computing: 9th International Conference, Pervasive 2011, San Francisco, CA, USA, 12–15 June 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 133–151. [Google Scholar]
- Dash, M.; Koo, K.K.; Decraene, J.; Yap, G.E.; Wu, W.; Gomes, J.B.; Shi-Nash, A.; Li, X. CDR-To-MoVis: Developing a mobility visualization system from CDR data. In Proceedings of the 2015 IEEE 31st International Conference on Data Engineering, Seoul, Republic of Korea, 13–17 April 2015; IEEE: New York, NY, USA, 2015; pp. 1452–1455. [Google Scholar]
- Lai, S.; Erbach-Schoenberg, E.Z.; Pezzulo, C.; Ruktanonchai, N.W.; Sorichetta, A.; Steele, J.; Li, T.; Dooley, C.A.; Tatem, A.J. Exploring the use of mobile phone data for national migration statistics. Palgrave Commun. 2019, 5, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Mamei, M.; Bicocchi, N.; Lippi, M.; Mariani, S.; Zambonelli, F. Evaluating origin–destination matrices obtained from CDR data. Sensors 2019, 19, 4470. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, M.S.; Choudhury, C.F.; Wang, P.; González, M.C. Development of origin–destination matrices using mobile phone call data. Transp. Res. Part C Emerg. Technol. 2014, 40, 63–74. [Google Scholar] [CrossRef]
- Zang, H.; Baccelli, F.; Bolot, J. Bayesian inference for localization in cellular networks. In Proceedings of the 2010 Proceedings IEEE INFOCOM, San Diego, CA, USA, 14–19 March 2010; IEEE: New York, NY, USA, 2010; pp. 1–9. [Google Scholar]
- Laurila, J.K.; Gática-Pérez, D.; Aad, I.; Blom, J.; Bornet, O.; Do, T.M.T.; Dousse, O.; Eberle, J.; Miettinen, M. The Mobile Data Challenge: Big Data for Mobile Computing Research. In Workshop on the Nokia Mobile Data Challenge, Proceedings of the 10th International Conference on Pervasive Computing, Newcastle, UK, 18–22 June 2012; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Ficek, M. CRAWDAD Dataset Ctu/Personal (v. 2012-03-15). 2012. Available online: https://crawdad.org/ctu/personal/20120315 (accessed on 11 January 2023). [CrossRef]
- de Montjoye, Y.A.; Smoreda, Z.; Trinquart, R.; Ziemlicki, C.; Blondel, V.D. D4D-Senegal: The Second Mobile Phone Data for Development Challenge. arXiv 2014, arXiv:1407.4885. [Google Scholar]
- Eagle, N.; Pentland, A.S. Reality mining: Sensing complex social systems. Pers. Ubiquitous Comput. 2006, 10, 255–268. [Google Scholar] [CrossRef]
- Batrashev, O.; Hadachi, A.; Lind, A.; Vainikko, E. Mobility Episode Detection from CDR’s Data Using Switching Kalman Filter. In Proceedings of the Fourth ACM SIGSPATIAL International Workshop on Mobile Geographic Information Systems—MobiGIS ’15, Bellevue, WA, USA, 3–6 November 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 63–69. [Google Scholar] [CrossRef]
- Dyrmishi, S.; Hadachi, A. Mobile Positioning and Trajectory Reconstruction Based on Mobile Phone Network Data: A Tentative Using Particle Filter. In Proceedings of the 2021 7th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Heraklion, Greece, 16–17 June 2021; IEEE: New York, NY, USA, 2021; pp. 1–7. [Google Scholar]
- Zheng, F.; Derrode, S.; Pieczynski, W. Semi-supervised optimal recursive filtering and smoothing in non-Gaussian Markov switching models. Signal Process. 2020, 171, 107511. [Google Scholar] [CrossRef]
- Yin, F.; Fritsche, C.; Jin, D.; Gustafsson, F.; Zoubir, A.M. Cooperative Localization in WSNs Using Gaussian Mixture Modeling: Distributed ECM Algorithms. IEEE Trans. Signal Process. 2015, 63, 1448–1463. [Google Scholar] [CrossRef]
- Laneuville, D.; Bar-Shalom, Y. Maneuvering target tracking: A Gaussian mixture based IMM estimator. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, Montana, 3–10 March 2012; IEEE: New York, NY, USA, 2012; pp. 1–12. [Google Scholar] [CrossRef]
- Plangi, S.; Hadachi, A.; Lind, A.; Bensrhair, A. Real-Time Vehicles Tracking Based on Mobile Multi-Sensor Fusion. IEEE Sens. J. 2018, 18, 10077–10084. [Google Scholar] [CrossRef]
- Hadachi, A.; Batrashev, O.; Lind, A.; Singer, G.; Vainikko, E. Cell phone subscribers mobility prediction using enhanced Markov Chain algorithm. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; IEEE: New York, NY, USA, 2014; pp. 1049–1054. [Google Scholar] [CrossRef]
- Rauch, H.E.; Tung, F.; Striebel, C.T. Maximum likelihood estimates of linear dynamic systems. AIAA J. 1965, 3, 1445–1450. [Google Scholar] [CrossRef]
- Murphy, K.P. Switching Kalman Filters; Technical Report; CMU: Pittsburgh, PA, USA, 1998. [Google Scholar]
- Bar-Shalom, Y.; Li, X. Estimation and Tracking: Principles, Techniques, and Software; Artech House: Norwood, MA, USA, 1993; ISBN 9780890066430. [Google Scholar]
- Huber, M.F.; Hanebeck, U.D. Progressive Gaussian mixture reduction. In Proceedings of the 2008 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008; IEEE: New York, NY, USA, 2008; pp. 1–8. [Google Scholar]
- Runnalls, A. Kullback-Leibler Approach to Gaussian Mixture Reduction. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 989–999. [Google Scholar] [CrossRef]
- Kullback, S.; Leibler, R.A. On Information and Sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Williams, J.L. Gaussian Mixture Reduction for Tracking Multiple Maneuvering Targets in Clutter; Air Force Institute of Technology (AFIT): Wright-Patterson Air Force Base, OH, USA, 2003. [Google Scholar]
- Lind, A.; Hadachi, A.; Batrashev, O. A new approach for mobile positioning using the CDR data of cellular networks. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017; IEEE: New York, NY, USA, 2017; pp. 315–320. [Google Scholar]
- Krajzewicz, D.; Hertkorn, G.; Rössel, C.; Wagner, P. SUMO (Simulation of Urban MObility)—An Open-Source Traffic Simulation. 2002. Available online: https://sumo.dlr.de/pdf/dkrajzew_MESM2002_SUMO.pdf (accessed on 13 February 2023).
- Lind, A.; Hadachi, A. Towards state-full positioning of mobile subscribers through advanced cell coverage modeling technique. In Proceedings of the 2021 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 1–3 June 2021; IEEE: New York, NY, USA, 2021; pp. 1–6. [Google Scholar]
- Hrovat, A.; Ozimek, I.; Vilhar, A.; Celcer, T.; Saje, I.; Javornik, T. Radio coverage calculations of terrestrial wireless networks using an open-source GRASS system. WSEAS Trans. Commun. Arch. 2010, 9, 646–657. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Subscribers | Period | CGI | Coverage | GPS |
|---|---|---|---|---|---|
| MDC | 200 | 1.5 years | anonymous | no | yes |
| CTU | 1 | 142 days | yes | no | yes |
| D4D | 9 mln. | 1 year | no | no | no |
| RMD | 100 | 125 days | yes | no | no |
| CDR’17 | 3 | 3 months | yes | yes | yes |
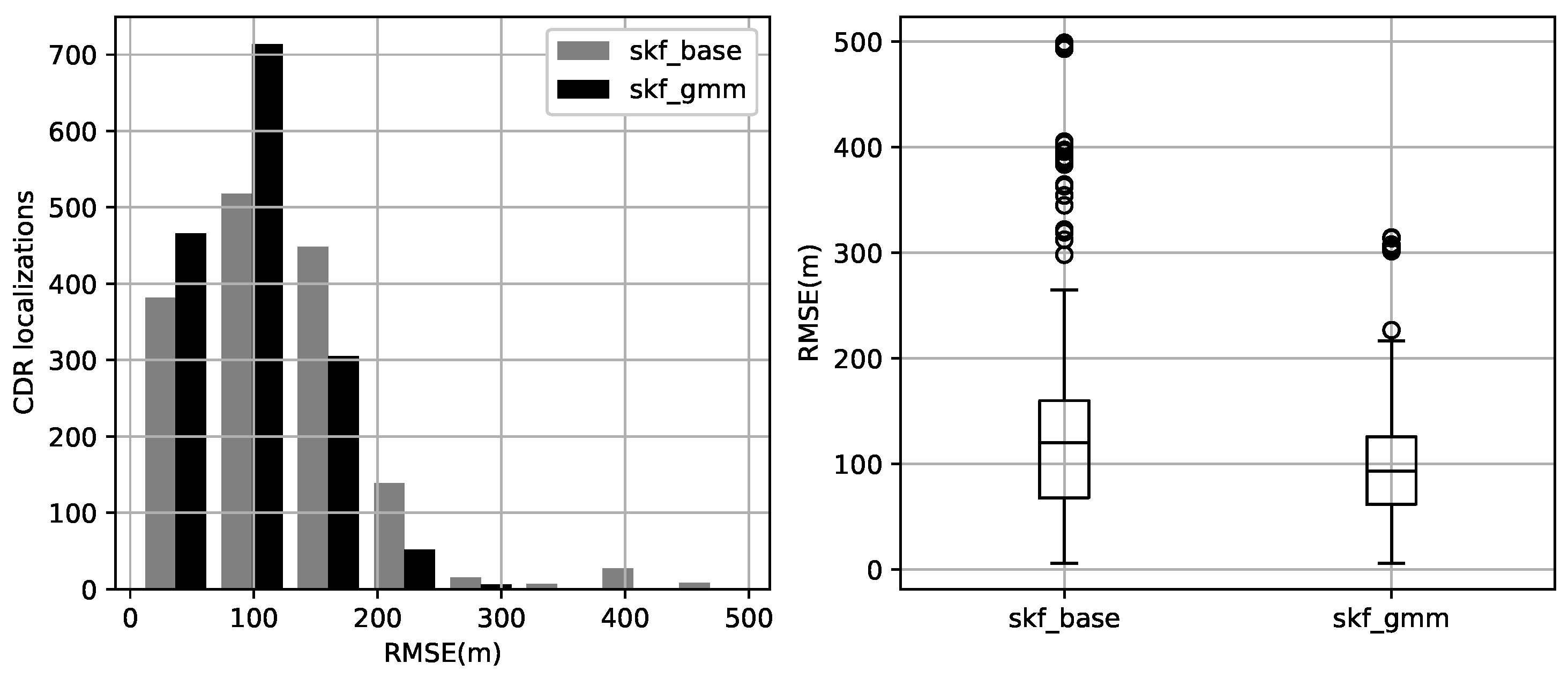
| Method | Mean | Std | Max | 25% | 50% | 75% |
|---|---|---|---|---|---|---|
| skf_base | 123.54 | 73.47 | 499.08 | 68.0 | 120.23 | 160.0 |
| skf_gmm | 98.69 | 48.65 | 314.60 | 61.81 | 93.11 | 125.72 |
| Total gain: | 20% | 34% | 37% | 9% | 23% | 21% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lind, A.; Wu, S.; Hadachi, A. Application of Gaussian Mixtures in a Multimodal Kalman Filter to Estimate the State of a Nonlinearly Moving System Using Sparse Inaccurate Measurements in a Cellular Radio Network. Sensors 2023, 23, 3603. https://doi.org/10.3390/s23073603
Lind A, Wu S, Hadachi A. Application of Gaussian Mixtures in a Multimodal Kalman Filter to Estimate the State of a Nonlinearly Moving System Using Sparse Inaccurate Measurements in a Cellular Radio Network. Sensors. 2023; 23(7):3603. https://doi.org/10.3390/s23073603
Chicago/Turabian StyleLind, Artjom, Shan Wu, and Amnir Hadachi. 2023. "Application of Gaussian Mixtures in a Multimodal Kalman Filter to Estimate the State of a Nonlinearly Moving System Using Sparse Inaccurate Measurements in a Cellular Radio Network" Sensors 23, no. 7: 3603. https://doi.org/10.3390/s23073603
APA StyleLind, A., Wu, S., & Hadachi, A. (2023). Application of Gaussian Mixtures in a Multimodal Kalman Filter to Estimate the State of a Nonlinearly Moving System Using Sparse Inaccurate Measurements in a Cellular Radio Network. Sensors, 23(7), 3603. https://doi.org/10.3390/s23073603