

Low-Cost Microcontroller-Based Multiparametric Probe for Coastal Area Monitoring




Abstract
:1. Introduction
- The complete design of the low-cost node based on physical sensors to measure physical and chemical parameters is presented. We include the creation of new physical sensors, which can be easily adapted to commercial devices due to their low cost and good sensibility. In addition, the design of the node, including the software and hardware aspects, is described.
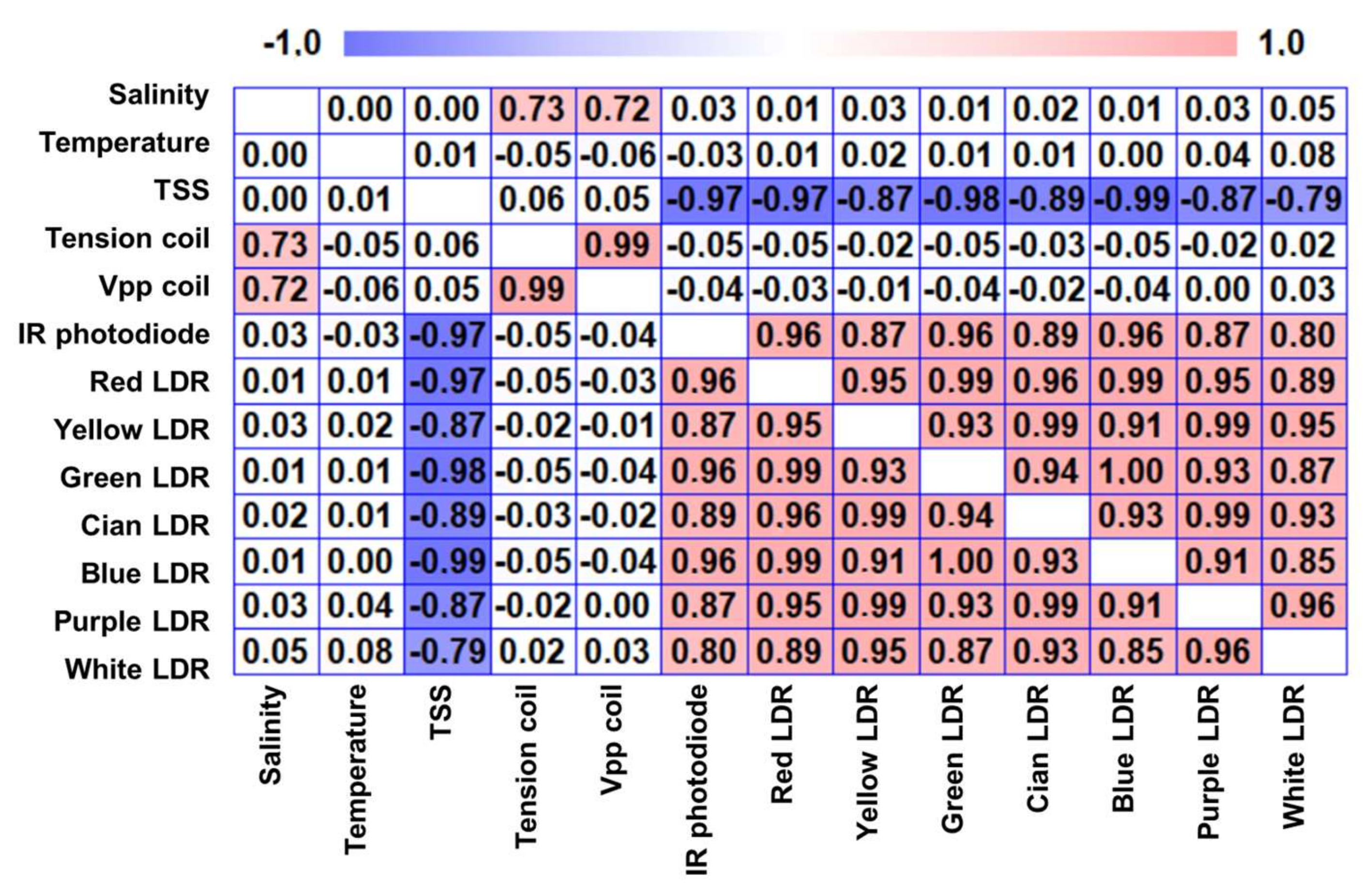
- Regarding the measurements, we have studied the possible interferences in the performance of the sensor, including the following: (i) electrical interferences of sensors’ signal and circuits for powering the sensor and receiving the signal, (ii) interference of salinity in the optical sensor for TSS measurement, (iii) interference of TSS in the electromagnetic sensor for salinity measurement, and (iv) interference of temperature on both TSS and salinity sensor.
2. Related Work
3. Overall Description of the Proposed Water Quality Monitoring System
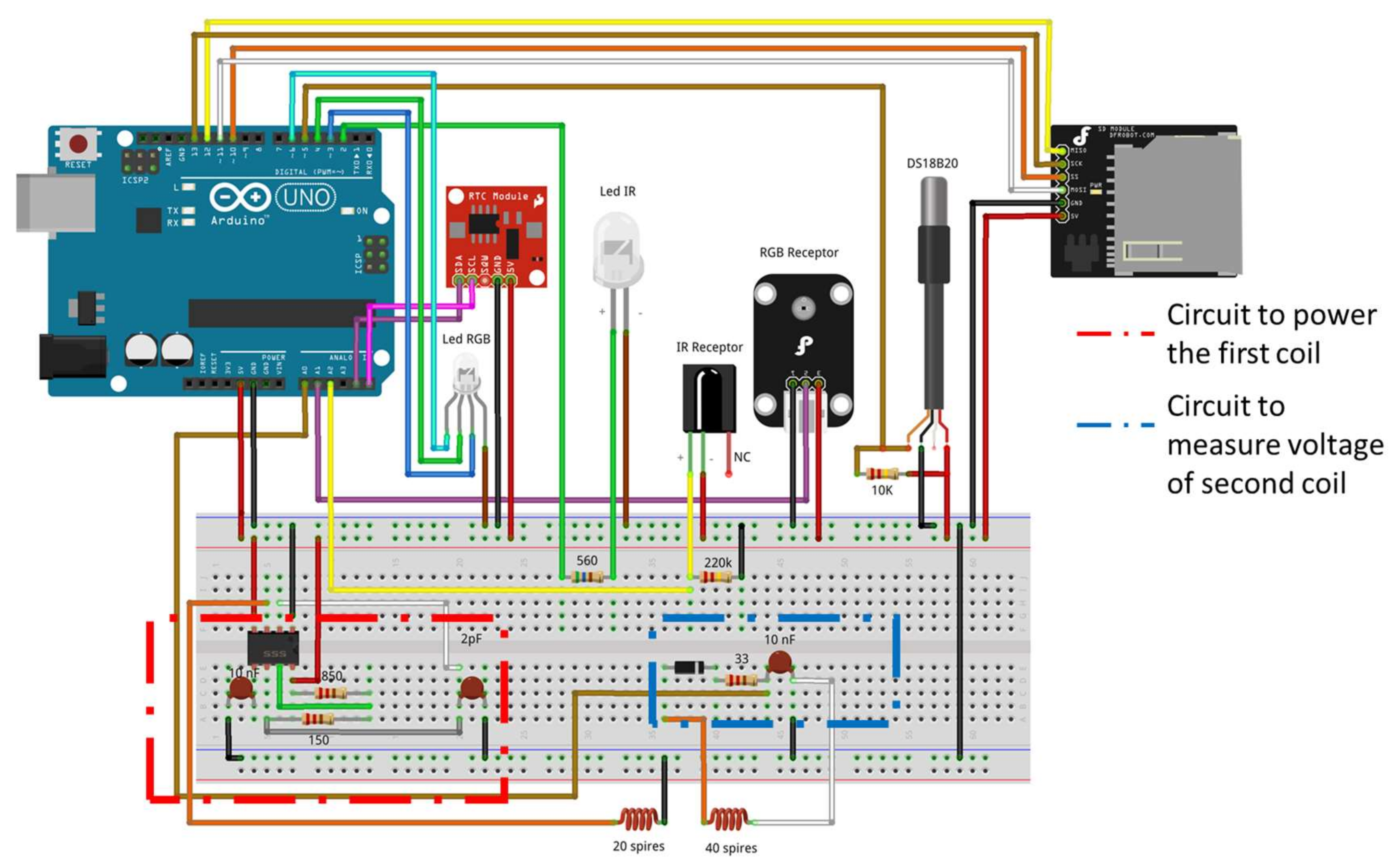
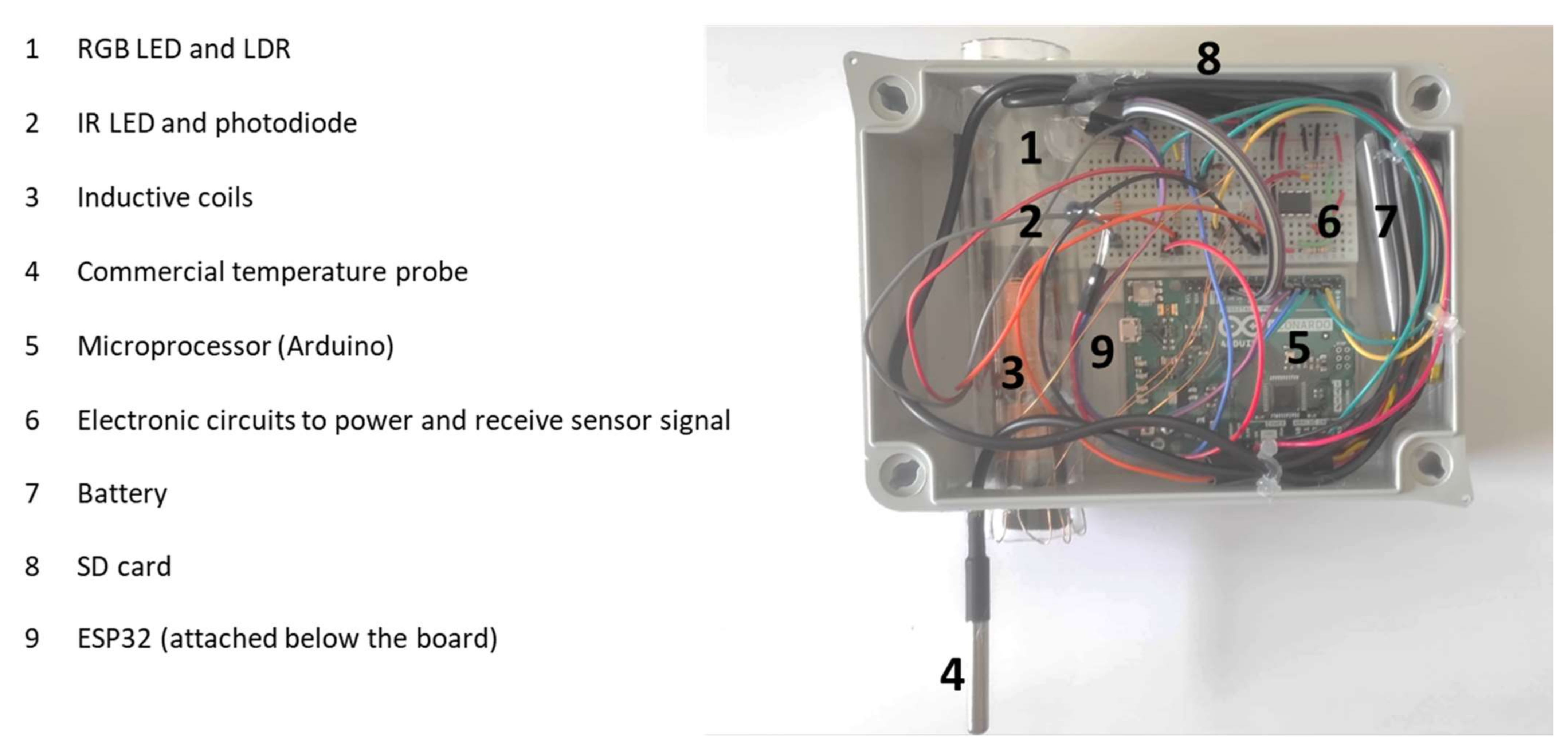
3.1. Sensor Node
- Microcontroller: ATmega328
- Operating Voltage: 5 V
- Input Voltage (Recommended): 7–12 V
- Digital Input/Output Pins: 14 (6 of them are PWM outputs)
- Analog Input Pins: 6
- DC current per pin: 20 mA/pin
- DC current for 3.3 V output pin: 50 mA/pin
- Flash Memory: 32 KB (ATmega328) of which 0.5 KB is used by Bootloader
- SRAM: 2 KB (ATmega328)
- EEPROM: 1 KB (ATmega328)
- Clock Speed: 16 MHZ
- Physical characteristics: Weight (25 gr), Width (53.4 mm), Length (68.6 mm).
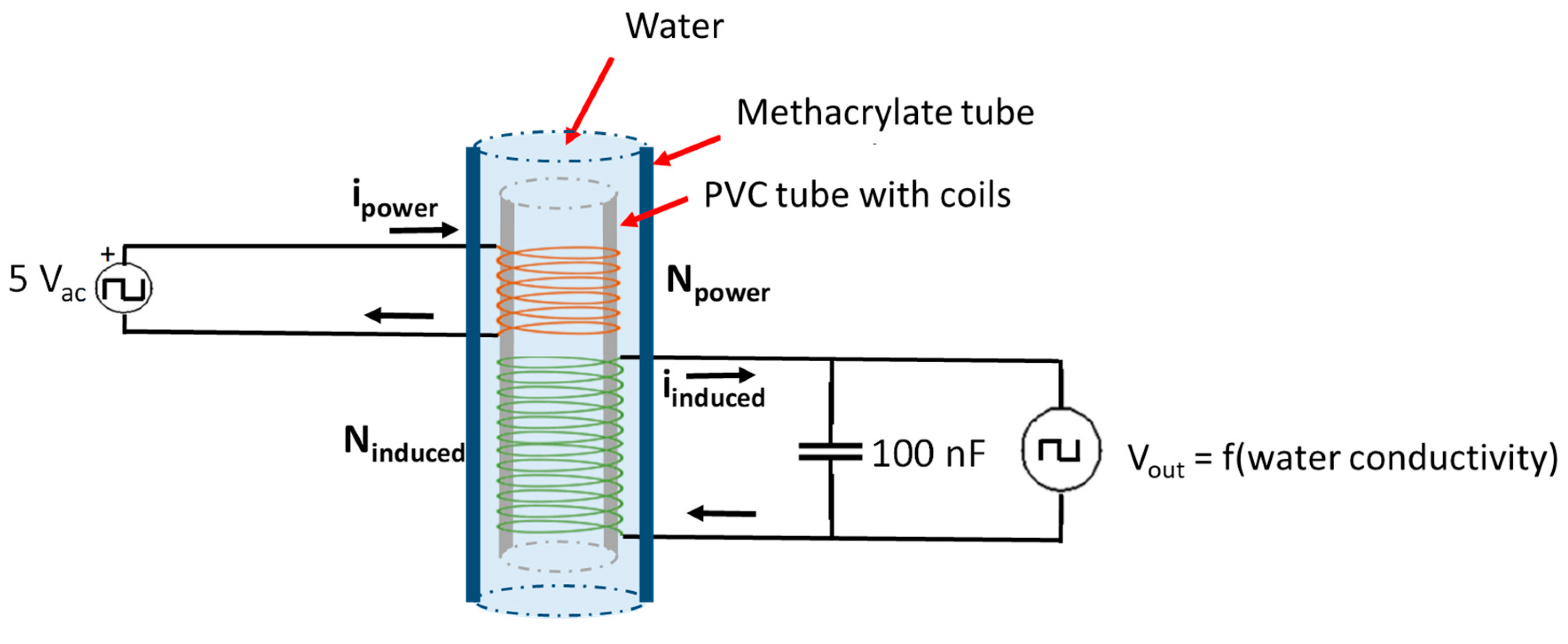
3.2. Water Salinity Sensor
3.3. TSS Sensor
3.4. Water Temperature Sensor
3.5. Timing Tag of Measurements
3.6. Communication Technology
4. Test Bench
4.1. Calibration Samples
4.2. Calibration Test
4.3. Measurement Process
4.4. Statistical Analysis
5. Results
5.1. General Results of the Calibration Test
5.2. Calibration of Proposed Sensors
5.2.1. Salinity Sensor
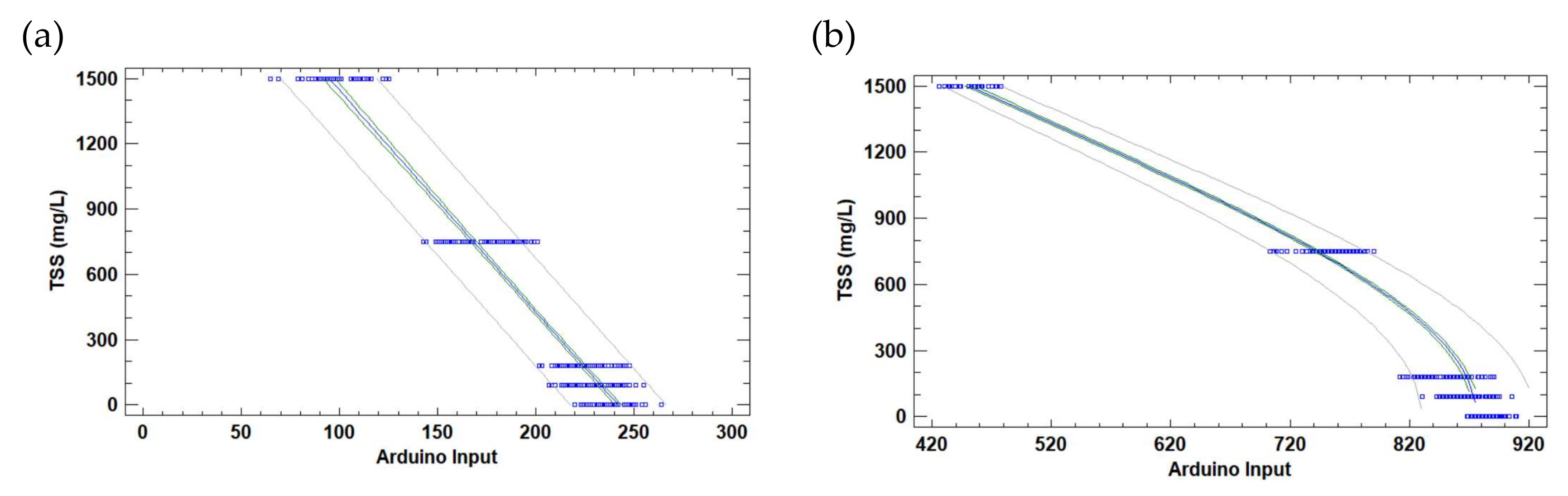
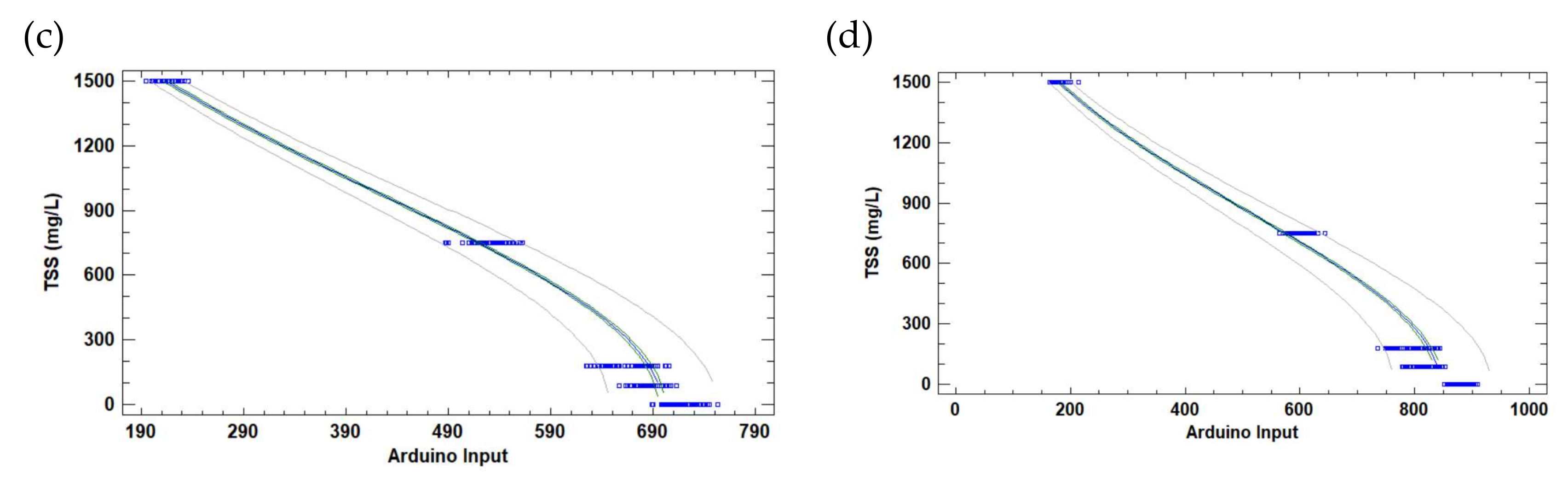
5.2.2. TSS Sensor
5.3. Measurement in Aquatic Systems
5.4. Discussion
5.4.1. Analyses of Calibration Results
5.4.2. Potential Impact of the Proposed Multiparametric Probe
5.4.3. Main Limitations of the Proposed Multiparametric Probe
6. Conclusions
- A sensor node combining two physical sensors (for TSS and for salinity) designed, created, calibrated in the laboratory, and verified in the real environment with a commercial probe for temperature has been presented.
- The complete design of the low-cost node is detailed, including the electronic components and the communication technology for integrating the node into a WSN.
- No electrical interferences of the sensors’ signal and circuits for powering the sensor and receiving the signal are detected when sensors are connected sequentially.
- No interference of salinity with the optical sensor for TSS measurement is detected.
- No interference of TSS in the electromagnetic sensor for salinity measurement is detected.
- No temperature effect on TSS and salinity sensors in the measured range is detected.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sunagawa, S.; Acinas, S.G.; Bork, P.; Bowler, C.; Babin, M.; Boss, E.; Cochrane, G.; de Vargas, C.; Follows, M.; Gorsky, G.; et al. Tara Oceans: Towards global ocean ecosystems biology. Nat. Rev. Microbiol. 2020, 18, 428–445. [Google Scholar] [CrossRef] [PubMed]
- Sala, E.; Mayorga, J.; Bradley, D.; Cabral, R.B.; Atwood, T.B.; Auber, A.; Cheung, W.; Costello, C.; Ferretti, F.; Friedlander, A.M.; et al. Protecting the global ocean for biodiversity, food and climate. Nature 2021, 592, 397–402. [Google Scholar] [CrossRef] [PubMed]
- Gössling, S.; Hall, C.M.; Scott, D. Coastal and ocean tourism. In Handbook on Marine Environment Protection; Springer: Cham, Switzerland, 2018; pp. 773–790. [Google Scholar]
- Murray, N.J.; Phinn, S.R.; DeWitt, M.; Ferrari, R.; Johnston, R.; Lyons, M.B.; Clinton, N.; Thau, D.; Fuller, R.A. The global distribution and trajectory of tidal flats. Nature 2019, 565, 222–225. [Google Scholar] [CrossRef] [PubMed]
- Danovaro, R.; Fanelli, E.; Aguzzi, J.; Billett, D.; Carugati, L.; Corinaldesi, C.; Dell’Anno, A.; Gjerde, K.; Jamieson, A.J.; Kark, S.; et al. Ecological variables for developing a global deep-ocean monitoring and conservation strategy. Nat. Ecol. Evol. 2020, 4, 181–192. [Google Scholar] [CrossRef] [PubMed]
- Bristow, L.A.; Mohr, W.; Ahmerkamp, S.; Kuypers, M.M. Nutrients that limit growth in the ocean. Curr. Biol. 2017, 27, R474–R478. [Google Scholar] [CrossRef]
- Kundzewicz, Z.W.; Szwed, M.; Pińskwar, I. Climate variability and floods—A global review. Water 2019, 11, 1399. [Google Scholar] [CrossRef]
- Cardoso, P.; Barton, P.S.; Birkhofer, K.; Chichorro, F.; Deacon, C.; Fartmann, T.; Fukushima, C.S.; Gaigher, R.; Habel, J.C.; Hallmann, C.A.; et al. Scientists’ warning to humanity on insect extinctions. Biol. Conserv. 2020, 242, 108426. [Google Scholar] [CrossRef]
- Watt, A.J.; Phillips, M.R.; Campbell, C.A.; Wells, I.; Hole, S. Wireless Sensor Networks for monitoring underwater sediment transport. Sci. Total Environ. 2019, 667, 160–165. [Google Scholar] [CrossRef]
- Jin, S.; Feng, G.P.; Gleason, S. Remote sensing using GNSS signals: Current status and future directions. Adv. Space Res. 2011, 47, 1645–1653. [Google Scholar] [CrossRef]
- Navalgund, R.R.; Jayaraman, V.; Roy, P.S. Remote sensing applications: An overview. Curr. Sci. 2007, 93, 1747–1766. [Google Scholar]
- Zhang, C.; Marzougui, A.; Sankaran, S. High-resolution satellite imagery applications in crop phenotyping: An overview. Comput. Electron. Agric. 2020, 175, 105584. [Google Scholar] [CrossRef]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Linke, J.; McDermid, G.; Masek, J.G.; Gao, F.; White, J.C. A new data fusion model for high spatial-and temporal-resolution mapping of forest disturbance based on Landsat and MODIS. Remote Sens. Environ. 2009, 113, 1613–1627. [Google Scholar] [CrossRef]
- Phiri, D.; Simwanda, M.; Salekin, S.; Nyirenda, V.R.; Murayama, Y.; Ranagalage, M. Sentinel-2 data for land cover/use mapping: A review. Remote Sens. 2020, 12, 2291. [Google Scholar] [CrossRef]
- Alcantara, C.; Kuemmerle, T.; Prishchepov, A.V.; Radeloff, V.C. Mapping abandoned agriculture with multi-temporal MODIS satellite data. Remote Sens. Environ. 2012, 124, 334–347. [Google Scholar] [CrossRef]
- Bugalho, L.; Camara, N.; Kogan, F. Study of wildfire environmental conditions in Portugal with NOAA/NESDIS satellite-based vegetation health index. J. Agric. Sci. Technol. B 2019, 9, 165–174. [Google Scholar]
- Williams, D.E. Low cost sensor networks: How do we know the data are reliable? ACS Sens. 2019, 4, 2558–2565. [Google Scholar] [CrossRef]
- Sendra, S.; Viciano-Tudela, S.; Ivars-Palomares, A.; Lloret, J. Low-Cost Water Conductivity Sensor Based on a Parallel Plate Capacitor for Precision Agriculture. In Proceedings of the International Conference on Advanced Intelligent Systems for Sustainable Development 2022, Rabat, Morocco, 22–27 May 2022. [Google Scholar]
- Jones, S.B.; Sheng, W.; Xu, J.; Robinson, D.A. lectromagnetic sensors for water content: The need for international testing standards. In Proceedings of the 2018 12th International Conference on Electromagnetic Wave Interaction with Water and Moist Substances (ISEMA), Lublin, Poland, 4–7 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–9. [Google Scholar]
- Maroni, A.; Tubaldi, E.; Ferguson, N.; Tarantino, A.; McDonald, H.; Zonta, D. Electromagnetic sensors for underwater scour monitoring. Sensors 2020, 20, 4096. [Google Scholar] [CrossRef]
- Yunus, M.A.M.; Mukhopadhyay, S.C. Novel planar electromagnetic sensors for detection of nitrates and contamination in natural water sources. IEEE Sensors J. 2010, 11, 1440–1447. [Google Scholar] [CrossRef]
- Nor, A.S.M.; Faramarzi, M.; Yunus, M.A.M.; Ibrahim, S. Nitrate and sulfate estimations in water sources using a planar electromagnetic sensor array and artificial neural network method. IEEE Sensors J. 2014, 15, 497–504. [Google Scholar] [CrossRef]
- Ahmad, I.; Ur Rehman, M.M.; Khan, M.; Abbas, A.; Ishfaq, S.; Malik, S. Flow-based electromagnetic-type energy harvester using microplanar coil for IoT sensors application. Int. J. Energy Res. 2019, 43, 5384–5391. [Google Scholar] [CrossRef]
- Das, B.; Jain, P.C. Real-time water quality monitoring system using Internet of Things. In Proceedings of the 2017 International Conference on Computer, Communications and Electronics (Comptelix), Jaipur, India, 1–2 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 78–82. [Google Scholar]
- Parra, L.; Sendra, S.; Lloret, J.; Bosch, I. Development of a conductivity sensor for monitoring groundwater resources to optimise water management in smart city environments. Sensors 2015, 15, 20990–21015. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Liu, A.; Han, Y.; Li, T. Sensors based on conductive polymers and their composites: A review. Polym. Int. 2020, 69, 7–17. [Google Scholar] [CrossRef]
- Azman, A.A.; Rahiman MH, F.; Taib, M.N.; Sidek, N.H.; Bakar IA, A.; Ali, M.F. A low cost nephelometric turbidity sensor for continual domestic water quality monitoring system. In Proceedings of the 2016 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia, 22–22 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 202–207. [Google Scholar]
- Arifin, A.; Irwan, I.; Abdullah, B.; Tahir, D. Design of sensor water turbidity based on polymer optical fiber. In Proceedings of the 2017 International Seminar on Sensors, Instrumentation, Measurement and Metrology (ISSIMM), Surabaya, Indonesia, 25–26 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 146–149. [Google Scholar]
- Wang, Y.; Rajib SS, M.; Collins, C.; Grieve, B. Low-cost turbidity sensor for low-power wireless monitoring of freshwater courses. IEEE Sensors J. 2018, 18, 4689–4696. [Google Scholar] [CrossRef]
- Mulyana, Y.; Hakim, D.L. Prototype of water turbidity monitoring system. In IOP Conference Series: Materials Science and Engineering, Proceedings of the International Symposium on Materials and Electrical Engineering (ISMEE) 2017, Bandung, Indonesia, 16 November 2017; IOP Publishing: Bristol, UK, 2018; Volume 384, p. 012052. [Google Scholar]
- Parra, L.; Rocher, J.; Escrivá, J.; Lloret, J. Design and development of low cost smart turbidity sensor for water quality monitoring in fish farms. Aquac. Eng. 2018, 81, 10–18. [Google Scholar] [CrossRef]
- Mansor, H.; Maju NA, H.; Gunawan, T.S.; Ahmad, R. The Development of Water Pollution Detector Using Conductivity And Turbidity Principles. IIUM Eng. J. 2022, 23, 104–113. [Google Scholar] [CrossRef]
- Sharaf El Din, E.; Zhang, Y.; Suliman, A. Mapping concentrations of surface water quality parameters using a novel remote sensing and artificial intelligence framework. Int. J. Remote Sens. 2017, 38, 1023–1042. [Google Scholar] [CrossRef]
- Abdelmalik, K.W. Role of statistical remote sensing for Inland water quality parameters prediction. Egypt. J. Remote Sens. Space Sci. 2018, 21, 193–200. [Google Scholar] [CrossRef]
- Sagan, V.; Peterson, K.T.; Maimaitijiang, M.; Sidike, P.; Sloan, J.; Greeling, B.A.; Maalouf, S.; Adams, C. Monitoring inland water quality using remote sensing: Potential and limitations of spectral indices, bio-optical simulations, machine learning, and cloud computing. Earth-Sci. Rev. 2020, 205, 103187. [Google Scholar] [CrossRef]
- Arduino Leonardo Module. Available online: https://www.farnell.com/datasheets/1682240.pdf (accessed on 25 December 2022).
- 7555 Integrated Circuit. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/icm7555-icm7556.pdf (accessed on 25 December 2022).
- Sendra, S.; Parra, L.; Ortuño, V.; Lloret, J.; De Valencia, U.P. A low cost turbidity sensor development. In Proceedings of the Seventh International Conference on Sensor Technologies and Applications (SENSORCOMM 2013), Barcelona, Spain, 25 August 2013; pp. 25–31. [Google Scholar]
- TSUS5400 Features. Available online: https://docs.rs-online.com/f3b6/0900766b80e22d5c.pdf (accessed on 25 December 2022).
- S186P Features. Available online: https://www.vishay.com/docs/81536/s186p.pdf (accessed on 25 December 2022).
- DS18B20 Temperature Sensor Features. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/ds18b20.pdf (accessed on 25 December 2022).
- DS1370 Features. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/ds1307.pdf (accessed on 25 December 2022).
- DS3231 Features. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/DS3231.pdf (accessed on 25 December 2022).
- Kress, N.; Gertner, Y.; Shoham-Frider, E. Seawater quality at the brine discharge site from two mega size seawater reverse osmosis desalination plants in Israel (Eastern Mediterranean). Water Res. 2020, 171, 115402. [Google Scholar] [CrossRef]
- Fournier, S.; Lee, T. Seasonal and interannual variability of sea surface salinity near major river mouths of the world ocean inferred from gridded satellite and in-situ salinity products. Remote Sens. 2021, 13, 728. [Google Scholar] [CrossRef]
- Soto-Navarro, J.; Jordá, G.; Amores, A.; Cabos, W.; Somot, S.; Sevault, F.; Macías, D.; Djurdjevic, V.; Sannino, G.; Li, L.; et al. Evolution of Mediterranean Sea water properties under climate change scenarios in the Med-CORDEX ensemble. Clim. Dyn. 2020, 54, 2135–2165. [Google Scholar] [CrossRef]
- Serrano, M.A.; Cobos, M.; Magaña, P.J.; Díez-Minguito, M. Sensitivity of Iberian estuaries to changes in sea water temperature, salinity, river flow, mean sea level, and tidal amplitudes. Estuar. Coast. Shelf Sci. 2020, 236, 106624. [Google Scholar] [CrossRef]
- Ashikur, M.R.; Rupom, R.S.; Sazzad, M.H. A remote sensing approach to ascertain spatial and temporal variations of seawater quality parameters in the coastal area of Bay of Bengal, Bangladesh. Remote Sens. Appl. Soc. Environ. 2021, 23, 100593. [Google Scholar] [CrossRef]
- Bourouhou, I.; Salmoun, F. Sea water quality monitoring using remote sensing techniques: A case study in Tangier-Ksar Sghir coastline. Environ. Monit. Assess. 2021, 193, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Bioresita, F.; Ummah, M.H.; Wulansari, M.; Putri, N.A. Monitoring Seawater Quality in the Kali Porong Estuary as an Area for Lapindo Mud Disposal leveraging Google Earth Engine. In IOP Conference Series: Earth and Environmental Science, Proceedings of the Geomatics International Conference 2021 (GEOICON 2021), Virtual, 27 July 2021; IOP Publishing: Bristol, UK, 2021; Volume 936, p. 012011. [Google Scholar]
- Patricio-Valerio, L.; Schroeder, T.; Devlin, M.J.; Qin, Y.; Smithers, S. A Machine Learning Algorithm for Himawari-8 Total Suspended Solids Retrievals in the Great Barrier Reef. Remote Sens. 2022, 14, 3503. [Google Scholar] [CrossRef]
- 2100Q Portable Turbidimeter from Hach. Available online: https://uk.hach.com/turbidimeters/2100q-portable-turbidimeter/family?productCategoryId=25046201232 (accessed on 18 January 2023).
- Solitax t-Line sc Turbidity Immersion probe from Hach. Available online: https://www.hach.com/p-solitax-t-line-sc-turbidity-immersion-probe-0001-4000-ntu-with-wiper-pvc/LXV423.99.10000 (accessed on 18 January 2023).
- HI-98703 Turbidity Meter from Hanna Instruments. Available online: https://www.hannainstruments.co.uk/home/1818-turbidity-meter (accessed on 18 January 2023).
- Seapoint Turbidity Meter. Available online: http://www.seapoint.com/stm.htm (accessed on 18 January 2023).
- Turbiditymeter from TURBIQUANT. Available online: https://www.sigmaaldrich.com/ES/es/product/mm/118325?gclid=CjwKCAiAzp6eBhByEiwA_gGq5KByrMzJ-HgVxVXfT-eW_PVxKUuEX2kpksGOLuli-CYxW9t7VgbjAxoC1AkQAvD_BwE&gclsrc=aw.ds (accessed on 18 January 2023).
- HI-98192 from Hanna Instruments. Available online: https://www.hannainstruments.co.uk/multi-parameter-devices/2131-hi-98192-professional-waterproof-ec-tds-resistivity-salinity-meter (accessed on 18 January 2023).
- Intellical CDC401 Field from Hach. Available online: https://uk.hach.com/intellical-cdc401-field-4-poles-graphite-conductivity-cell-5-m-cable/product?id=24929274325&callback=qs (accessed on 18 January 2023).
- InPro7108-VP-PEEK from Mettler Toledo. Available online: https://www.mt.com/es/en/home/products/Process-Analytics/conductivity-resistivity-analyzers/conductivity-sensor/probe-InPro-7108-VP-PEEK.html#documents (accessed on 18 January 2023).
- Orion™ DuraProbe™ from Thermo Fisher Scientific. Available online: https://www.thermofisher.com/order/catalog/product/013010MD (accessed on 18 January 2023).
- Sendra, S.; Parra, L.; Jimenez, J.M.; Garcia, L.; Lloret, J. LoRa-based network for water quality monitoring in coastal areas. Mob. Netw. Appl. 2022, 1–17. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample ID | Added NaCl (g) | Added Lime (mg) | Salinity (g/L) | TDS (mg/L) |
|---|---|---|---|---|
| 1 | 0 | 150 | 0 | 1500 |
| 2 | 0 | 75 | 0 | 750 |
| 3 | 0 | 18 | 0 | 180 |
| 4 | 0 | 9 | 0 | 90 |
| 5 | 0 | 0 | 0 | 0 |
| 6 | 0.5 | 150 | 5 | 1500 |
| 7 | 0.5 | 75 | 5 | 750 |
| 8 | 0.5 | 18 | 5 | 180 |
| 9 | 0.5 | 9 | 5 | 90 |
| 10 | 0.5 | 0 | 5 | 0 |
| 11 | 1.5 | 150 | 15 | 1500 |
| 12 | 1.5 | 75 | 15 | 750 |
| 13 | 1.5 | 18 | 15 | 180 |
| 14 | 1.5 | 9 | 15 | 90 |
| 15 | 1.5 | 0 | 15 | 0 |
| 16 | 2.5 | 150 | 25 | 1500 |
| 17 | 2.5 | 75 | 25 | 750 |
| 18 | 2.5 | 18 | 25 | 180 |
| 19 | 2.5 | 9 | 25 | 90 |
| 20 | 2.5 | 0 | 25 | 0 |
| 21 | 3.5 | 150 | 35 | 1500 |
| 22 | 3.5 | 75 | 35 | 750 |
| 23 | 3.5 | 18 | 35 | 180 |
| 24 | 3.5 | 9 | 35 | 90 |
| 25 | 3.5 | 0 | 35 | 0 |
| Dependent Variable | Factor | F-Value | p-Value | Average VPP for | ||||
|---|---|---|---|---|---|---|---|---|
| 0 g/L | 5 g/L | 15 g/L | 25 g/L | 35 g/L | ||||
| Tension Coil | Salinity | 540.76 | 0.000 | 154.187 a | 333.613 b | 392.773 c | 401.267 cd | 408.24 d |
| Dependent Variable | Factor | F-Value | p-Value | Average Arduino Inputs for | ||||
|---|---|---|---|---|---|---|---|---|
| 0 mg/L | 90 mg/L | 180 mg/L | 750 mg/L | 1500 mg/L | ||||
| IR photodiode | Turbidity | 1669.45 | 0.000 | 238.52 e | 229.96 d | 224.04 c | 171.054 b | 93.6301 a |
| Red LDR | 3039.94 | 0.000 | 889.4 e | 867.64 d | 848.093 c | 751.419 b | 472.89 a | |
| Yellow LDR | 1106.22 | 0.000 | 976.32 c | 973.76 c | 959.373 c | 957.176 b | 643.205 a | |
| Green LDR | 4484.62 | 0.000 | 718.08 e | 683.907 d | 663.213 c | 525.811 b | 232.507 a | |
| Cian LDR | 2855.08 | 0.000 | 973.893 c | 977.4 c | 969.307 c | 943.122 b | 386.685 a | |
| Blue LDR | 5533.26 | 0.000 | 883.12 e | 813.293 d | 786.547 c | 584.311 b | 193.644 a | |
| Purple LDR | 1256.16 | 0.000 | 976.467 c | 799.493 c | 972.307 c | 958.27 b | 616.767 a | |
| White LDR | 293.22 | 0.000 | 977.97 bc | 980.107 c | 978 bc | 963.581 b | 771.767 a | |
| Arduino Input for: | Irrigation Ditch | Seashore | ||||||
|---|---|---|---|---|---|---|---|---|
| Measure 1 | Measure 2 | Measure 3 | Mean | Measure 1 | Measure 2 | Measure 3 | Mean | |
| Red LED | 870 | 897 | 898 | 888.33 | 838 | 836 | 845 | 839.67 |
| Green LED | 667 | 751 | 732 | 716.67 | 613 | 656 | 684 | 651.00 |
| Blue LED | 875 | 874 | 891 | 880.00 | 702 | 796 | 808 | 768.67 |
| Yellow LED | 1003 | 961 | 964 | 976.00 | 956 | 945 | 977 | 959.33 |
| Purple LED | 967 | 988 | 951 | 968.67 | 964 | 975 | 974 | 971.00 |
| Cian LED | 956 | 1003 | 963 | 974.00 | 957 | 972 | 972 | 967.00 |
| White LED | 980 | 983 | 971 | 978.00 | 1000 | 966 | 964 | 976.67 |
| IR LED | 242 | 241 | 242 | 241.67 | 219 | 220 | 220 | 219.67 |
| Inductive Coil | 195 | 200 | 196 | 197.00 | 496 | 492 | 497 | 495.00 |
| Ref. | Description | Measured Parameter | Measured Range | Sensitivity (%) | Price (EUR) |
|---|---|---|---|---|---|
| [52] | Handheld equipment | Turbidity (NTUs) | 0–1000 | 2% | 2813.00 |
| [53] | Probe | Turbidity (NTUs) | 0–4000 | 1% | N.I. |
| [54] | Handheld equipment | Turbidity (NTUs) | 0–1000 | 2% | 1670.71 |
| [55] | Probe | Turbidity (FTUs) | 0–1250 | 2% | N.I. |
| [56] | Handheld equipment | Turbidity (NTUs) | 0–1100 | 2% | 2020 |
| Our | Handheld equipment and probe | TSS (mg/L) | 0–1500 | 0.7% | <100 |
| [57] | Handheld equipment | Conductivity (mS/cm) | 0–400 | 1% | 795 |
| [58] | Probe | Salinity (ppt) | 0–48 | 2% | 979.00 |
| [59] | Probe | Conductivity (mS/cm) | 0–650 | 5% | N.I. |
| [60] | Probe | Conductivity (mS/cm) | 0–200 | N.I. | N.I. |
| Our | Handheld equipment and probe | Salinity (ppt) | 0–35 | 0.94% | <100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parra, L.; Viciano-Tudela, S.; Carrasco, D.; Sendra, S.; Lloret, J. Low-Cost Microcontroller-Based Multiparametric Probe for Coastal Area Monitoring. Sensors 2023, 23, 1871. https://doi.org/10.3390/s23041871
Parra L, Viciano-Tudela S, Carrasco D, Sendra S, Lloret J. Low-Cost Microcontroller-Based Multiparametric Probe for Coastal Area Monitoring. Sensors. 2023; 23(4):1871. https://doi.org/10.3390/s23041871
Chicago/Turabian StyleParra, Lorena, Sandra Viciano-Tudela, David Carrasco, Sandra Sendra, and Jaime Lloret. 2023. "Low-Cost Microcontroller-Based Multiparametric Probe for Coastal Area Monitoring" Sensors 23, no. 4: 1871. https://doi.org/10.3390/s23041871
APA StyleParra, L., Viciano-Tudela, S., Carrasco, D., Sendra, S., & Lloret, J. (2023). Low-Cost Microcontroller-Based Multiparametric Probe for Coastal Area Monitoring. Sensors, 23(4), 1871. https://doi.org/10.3390/s23041871