1. Introduction
Indoor positioning designs for mobile communication systems have attracted increasing attention recently due to emergency and security concerns. With the increase in time spent by mobile phone users in indoor environments, a mandatory bill, called Enhanced 911 (E911) was passed by the USA, providing the specific requirements for the indoor positioning accuracy of mobile communication systems. The indoor positioning accuracy requirements of E911 are less than 100 m (67% calls) and 300 m (95% calls) [
1]. However, the well-known outdoor positioning system, GPS, is not useful for guaranteeing the accuracy of indoor positioning because of the shielding effect of the positioning signal transmission of satellites, i.e., the positioning ability of GPS is weak in regards to indoor environments such as shopping malls, hypermarkets, office building, etc. A variety of theoretical and available technologies have been proposed in recent decades for achieving the requirements of the indoor positioning [
2,
3,
4,
5], based on methods using infrared rays (IR), ultrasound, radio-frequency identification (RFID), wireless local area networks (WLAN), Bluetooth, audible sound, and other technologies. Nevertheless, not all of the above-mentioned methods can be applied to mobile communication systems due to complexity of implementation and the costs of the hardware and software; hence, a new design which is suitable for performing indoor positioning, based on the integration of a single microphone of the mobile communication system and one positioning estimation design. is proposed in this investigation.
Many indoor positioning methods have been proposed in recent years, and an accurate positioning estimation is the common goal of these designs. The earliest design was based on an infrared ray (IR) system [
5,
6,
7,
8,
9], and until now, it was the most simple and common design for the purpose of indoor positioning. It is possible that the indoor positioning performance of these types of IR-based designs is acceptable in indoor environments which are well-arranged. However, practically, environmental light sources, such as florescent light and sunlight, are always tricky problems which strongly reduce position accuracy [
8]. To compensate for the effect of this environment disturbance, several filters have been developed [
8,
10]. Applications of IR-based indoor positioning designs are constrained due to these interferences, and constructing such a light-based system comes at a high cost. Radio frequency (RF)-based technologies [
11,
12] are the other designs used for achieving the indoor positioning goal. Categories of RF-based positioning methods are mainly divided into two groups: 1. the radio frequency identification (RFID) method, and 2. the Wireless Local Area Network (WLAN) method. WhereNet is a real-time indoor and outdoor positioning design developed by Zebra Technologies via the RFID method for users who are in intricate environments, such as libraries, offices, etc. [
4,
13]. Key parts comprising this positioning system include tags, positioning antennas, processors, servers, where ports, and a software algorithm using the differential time of arrival method (TDOA) for calculating the locations of moving tags.
The major disadvantage of this kind of positioning method is that is necessitates an enormous cost for building numerous infrastructures in the working area. As to the WLAN positioning design, most of WLAN-based algorithms are developed via adopting the received signal strength of the WLAN signals. Generally speaking, WLAN-based designs possess a low-cost feature due to the popularity of WLAN infrastructures in indoor environments. By building on this advantage, a RADAR positioning system has been developed by a Microsoft research group, combining received signal strength detection with the triangulation positioning method. Unfortunately, the received signal strength of WLAN is naturally and inevitably affected by various environmental uncertainties, such as the multipath effect, the no line-of-sight effect [
14,
15,
16,
17], etc.; hence, some auxiliary designs are proposed to reduce the effect of environmental uncertainties [
15,
18,
19], e.g., a radio map using the fingerprinting method, or the approximation design of a specific environment using the fuzzy logic approach. Fingerprinting techniques work well when the stored information of WLAN access points (APs) increase significantly, i.e., more APs are needed [
20]. Algorithms based on sound detection provide another potential method for indoor positioning designs. The Active Bat system was developed by AT&T Cambridge by mimicking the navigation behavior of bats [
21].
For improving the accuracy of the Active Bat system, a new design called the Cricket system combines the overall design of the Active Bat system with an extra RF method [
22,
23]. For the above developments, multi-sensors and ultrasound designs are adopted. Daredevil, developed by Microsoft, uses audible sound sources, providing an indoor positioning ability for mobile phones with at least two embedded microphones [
4]. In the work in [
14], the mobile phone is used as an emitter, and it collocates with the Wi-Fi network to achieve higher accuracy. A contrasting design, in which the handheld devices are arranged as receivers for some predefined emitters, is another popular design because mobile phone users always need the real-time display of the mobile phones’ monitors [
24,
25]. The positioning algorithm based on TOA or TDOA methods requires that multi-sensors be used, i.e., the total costs will be higher than those using the single sensor design; besides, the TOA or TDOA methods are degraded by four main factors: 1. background noise, 2. the multi-path effect [
26,
27], 3. non line-of-sight propagation [
28,
29], and 4. mobile synchronization recovery [
30,
31].
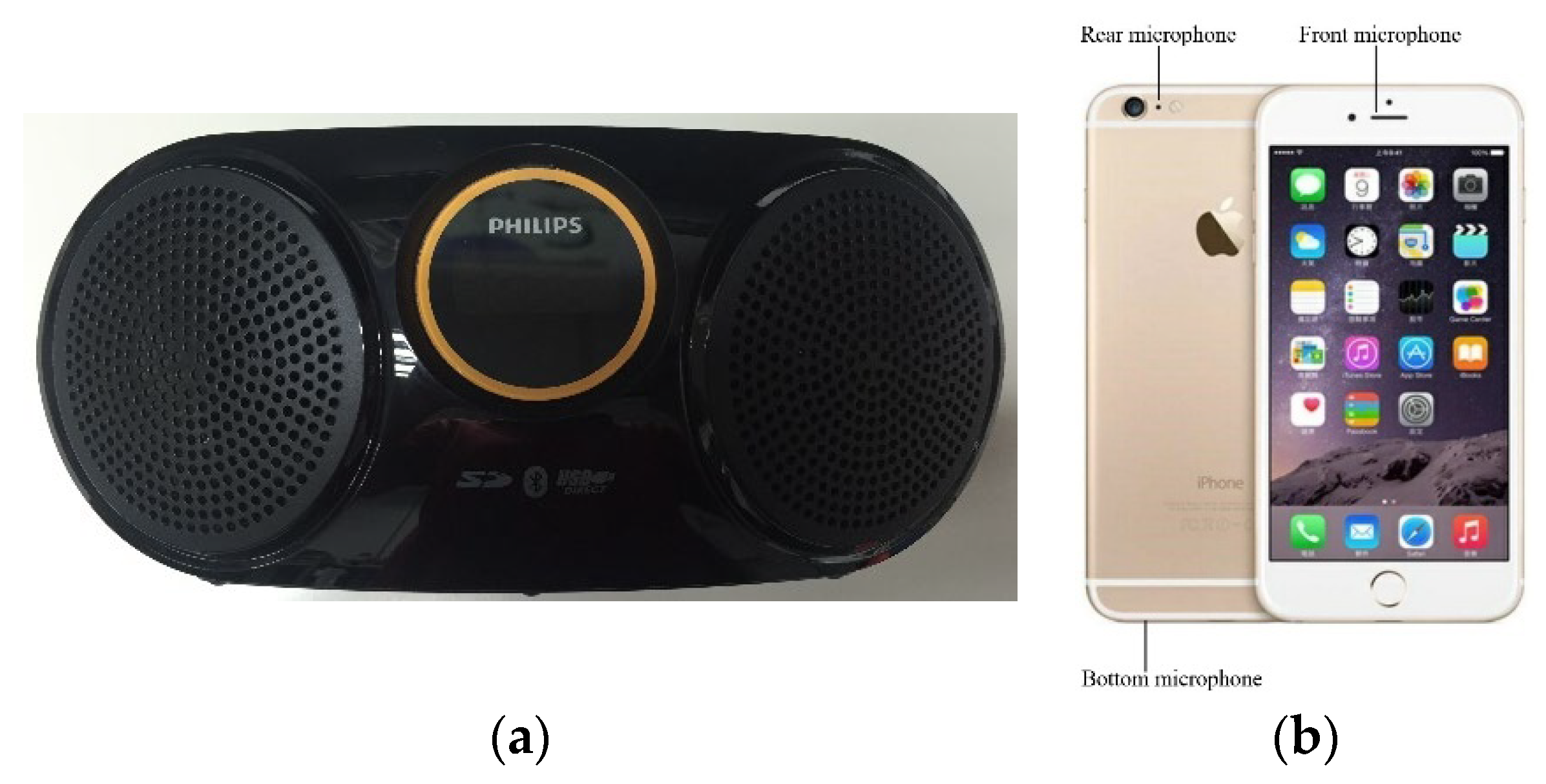
Therefore, an indoor positioning algorithm which can be easily implemented in a mobile phone using just one microphone is proposed. Unlike in the above design, in which mobile phones were set up as emitters, in this study, the mobile phone’s microphone is arranged as the receiver of tagged sound sources using distinct frequencies. Four tagged sound sources with distinct frequencies are broadcasted from speakers placed in the corners of an indoor space, and for reducing the total cost of the hardware, only one mobile phone microphone is used to collect messages of different tagged sound sources. Regarding the development of the methodology, one novel indoor positioning method combining the received signal strength (RSS) method, the fast Fourier transform (FFT) method, H2 estimation design, and the intersection of circles method is proposed. In this proposed method, RSS is used to calculate the strength of each tagged sound source, FFT is adopted to analyze the spectrum of the collected data of tagged sound sources, the H2 estimation design is used to purify the noisy tagged sound source, and output denoised sound pressure level (SPL), and an accurately estimated position of the user in an indoor environment can then be solved by the intersection of circles method.
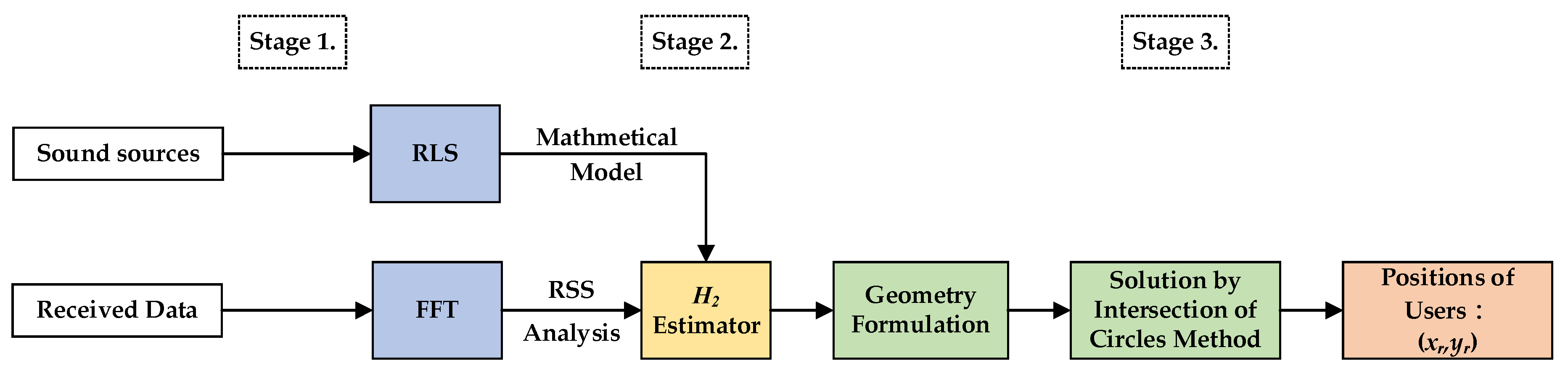
2. The Proposed Indoor Positioning Algorithm
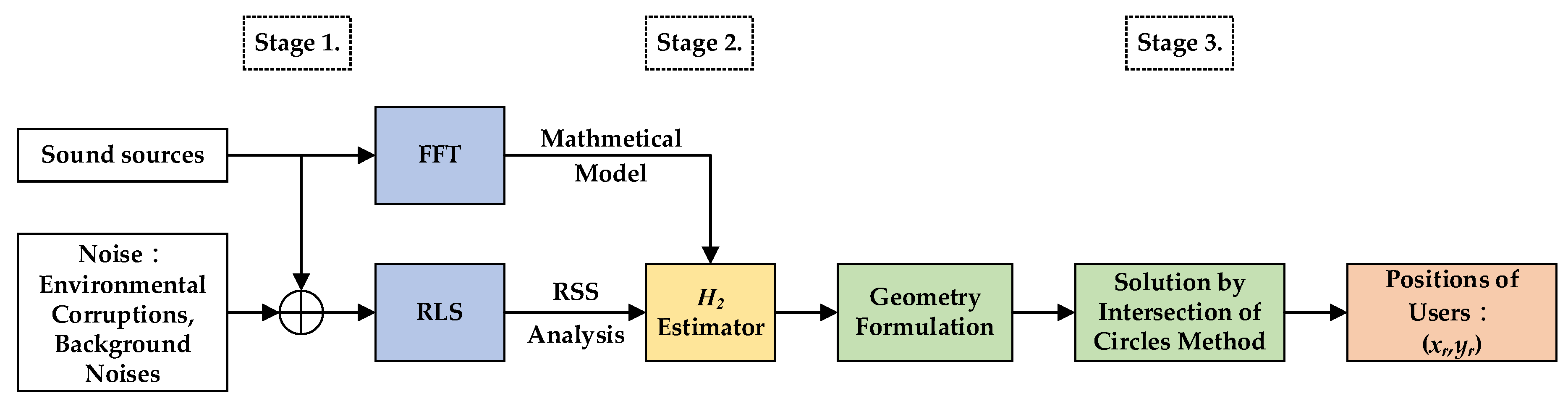
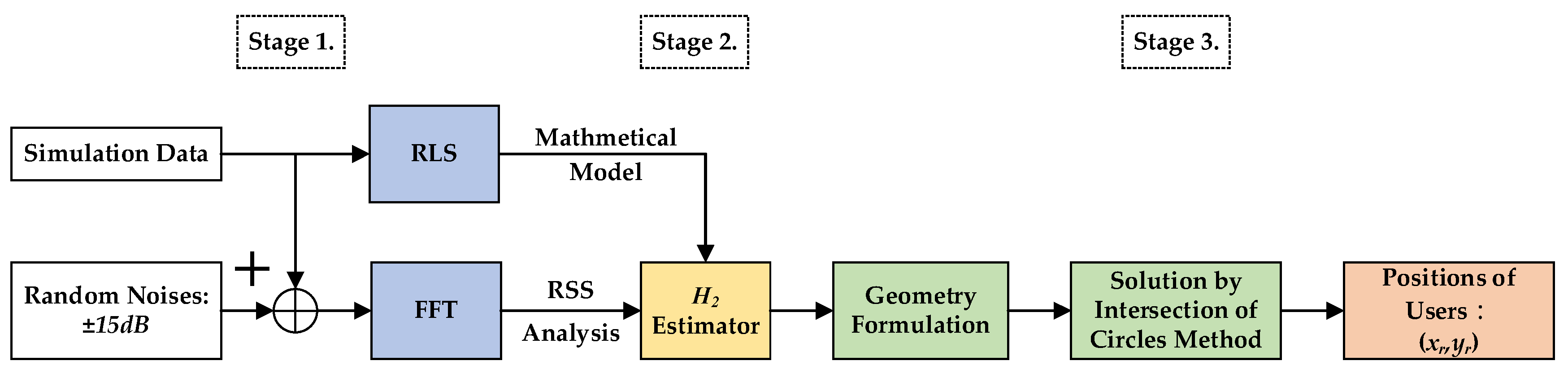
The overall schematic of the proposed indoor positioning design is shown as
Figure 1. In this investigation, this procedure is separated into three stages. A RSS analysis of the first stage is used to verify the pressure of the received signals measured by the single microphone of the mobile phones; additionally, in this stage, one system identification method—recursive least square (RLS)—and the famous power spectrum analysis tool—FFT—are utilized to simulate the walk behavior of users and make SPL selections regarding which two tagged sound sources will be adopted. In the second stage, one novel estimation design possesses an effective reduction ability regarding environmental corruptions. A set of purified SPLs can be obtained by using this proposed estimation design, and the first two of these four SPLs, which exhibit the strongest intensities, will be used as inputs of geometry equations in the third stages. Based on the purified SPLs, four geometry equations, which are functions of the users’ indoor position
, can be easily determined from the relationship between tagged sound sources and the microphone of the user’s mobile phone. The users’ indoor position
can be further solved by the intersection of circles method in the third stage.
2.1. Data Acquisition and RSS Analysis
In the following, a detailed mathematical expression for these three stages will be derived. In the first stage, the received raw data of the four tagged sound sources are as follows:
, for
1 to 4, with distinct tagged frequencies, should be identified. As to the choice of these two tagged sound sources, there are two steps arranged previously: calculations of magnitudes and frequencies. For identifying the magnitude and frequency, FFT and RSS analysis are used. The tagged frequency of each sound source cannot be higher than 20 kHz due to the physical limitation of the standard microphone used, and the sampling frequency of the mobile phone is 8 kHz; hence, tag frequencies of the sound sources are selected as 15.5 kHz, 16.5 kHz, 17.5 kHz, and 18.5 kHz, respectively. For separating the four tagged sound sources, a specific frequency tag
is assigned for each of the four tagged sound sources, as follows:
Denote the received signals of the tagged sound sources
as
, for
1 to 4, which contain all surrounding sounds. In this stage, two tagged sound candidates will be selected based on the messages of magnitudes and frequencies of these four tagged sound sources. For the purpose of calculating magnitudes (dB) and frequencies (Hz) of the tagged sound sources, the famous power spectrum method FFT is used. According to the definition of FFT, the magnitude for these four distinct frequencies can be expressed as:
A mean value magnitude adopted for calculation of the intensities of the tagged sound sources is defined as the following:
where
is the number of bins. Equations (2) and (3) will be utilized to identify the received tagged sound sources.
2.2. Indoor Positioning Algorithm
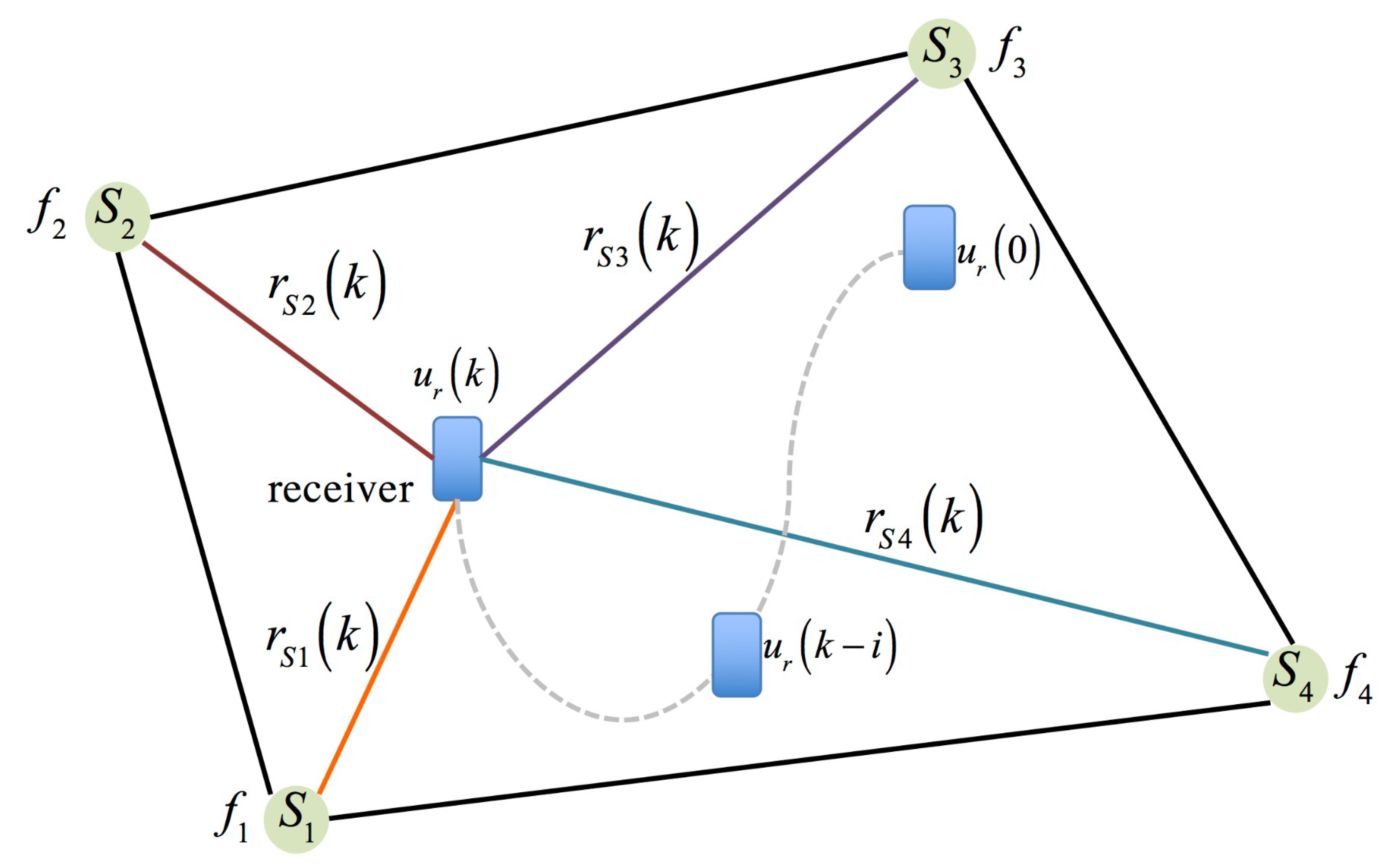
The geometry relationship between the carried receiver and distinct tagged sound sources is illustrated in
Figure 2. In
Figure 2, the carried receiver is set up as the mobile phone and is initialized as
. Suppose at least four tagged sound sources, with distinct frequencies, are placed in four corners of an indoor space, and their coordinates are represented as
,
,
, and
.
Figure 2 is an irregular-shaped indoor plane, and there are four tagged sound sources placed in four corners. Tagged sound sources are denoted as
, for
1 to 4, and tag frequencies of these sound sources are set up as
. As to the initial locations of the tagged sound sources, they are placed in
of the test indoor plane. The moving data of the carried receiver in every time instant is defined as:
where
is number of indoor positioning iterations.
In the following, the transformation of SPLs and the relative distances will be detailed.
Data collection of SPLs: The carried receiver collects four different SPL values from the tagged sound sources at each sampling time, which can be expressed as a set
LSn:
where
is the measured SPL of
with the tag frequency
.
Relative distances between each tagged sound source and the receiver can be expressed as the following four sets.
where
is the relative distance from the positions of tagged sound sources
to the receiver. Based on Equations (5) and (6), the instantaneous relative distance between each tagged sound source and the receiver can be calculated from the SPL difference
and
as
where
is the uncertainty room constant. Due to the fact that
cannot be measured in prior, it is regarded as a modeling uncertainty. Based on this, the corrupted relative distance
can be further expressed as below:
where initial values of
and
are
and
, respectively, and
.
The next section will introduce the method of extracting the noiseless SPLs with distinct tagged frequencies and derive the geometry mathematical formulation for finding the instantons positions of the mobile phone users.
2.2.1. Geometric Mathematical Formulation
In
Figure 3, there are four right angle triangles inside a quadrilateral, and each of them describes the relationship between the receiver and each tagged sound sources.
Based on
Figure 3, four equations are derived, and these equations express the geometric relationships between the receiver and the tagged sound sources in an indoor plane.
where
,
,
, and
are the coordinates of the tagged sound sources, and these positions are fixed and known.
is the coordinate of the receiver at time instant
.
,
are the relative distances of the receiver to the tagged sound sources
at time instant
and can be calculated from Equation (8).
From the above mathematical formulation for the geometric relationship between the tagged sound sources and the receiver, four equations are obtained. However, only two of these four equations will be utilized to solve the two unknowns:
, and two of these four equations—Equations (9)–(12)—will be selected according to the measured SPLs by using Equations (2) and (3). The criterion for selecting the two equations is
and
, e.g., if the intensity sequence of the measured SPLs is in sequence:
based on Equations (3), (10) and (11), the following will then be selected and combined as a set of binary quadratic equations as:
2.2.2. Solution by Intersection of Two Circles Method
For solving the solution of the binary quadratic equations, the intersection of two circles method is applied. The reason for using this method is that it offers calculation convenience and a low computational burden for calculators of mobile phones.
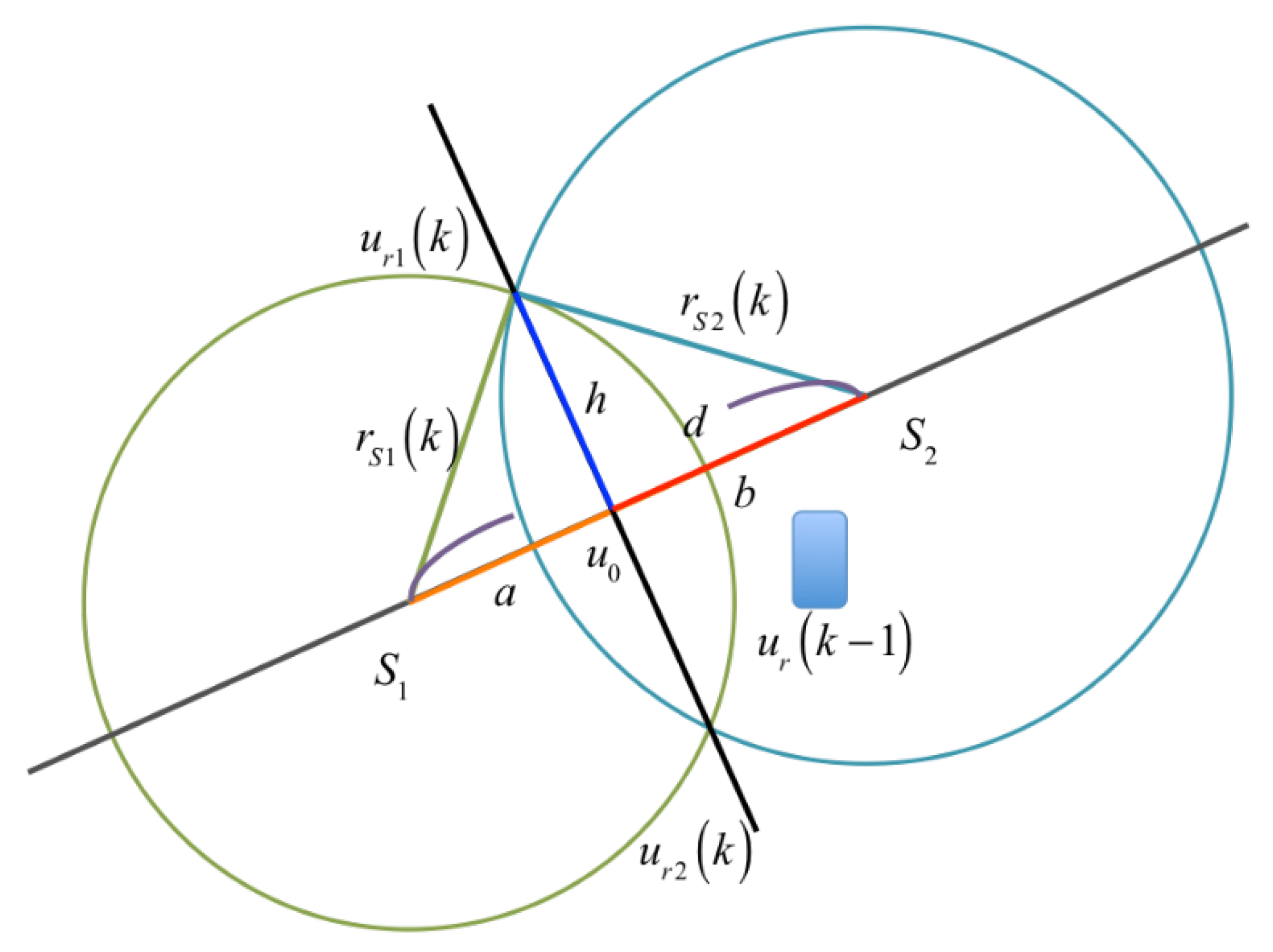
In
Figure 4,
and
are tagged sound sources which are selected from
Figure 3. The coordinates are
and
, respectively. Two overlapped circles can be illustrated when a radius
and
, which are the relative distance between the receiver and the tagged sound source, are assigned for tagged sound sources
and
, respectively. Suppose
and
are large enough to intersect with each other. Two intersect point,
and
, can be obtained, as shown in
Figure 4. Theoretically, one of these two points, (
and
), would be the solution of the corresponding binary quadratic equations.
Denoting the distance
as
, it can be expressed as:
where
is
and
is
.
There are two equations obtained from triangles
and
as
Using
, the variable
can be solved as:
The solution of the point
can be obtained
Substituting
into Equation (16) to solve
, the coordinate of the intersection point
can be obtained as below:
In Equation (20), two position solutions of the receiver are obtained simultaneously, but only one of them is the correct answer. There is a simple method to determine whether it is the correct one: the correct solution must be inside the indoor plane.
However, there are some special cases in which two solutions of Equation (20) are both inside the quadrilateral
. One judgment is proposed for the reasonable selection of these special cases by considering the moving velocity of the users. Normally, a moving velocity of 10 m/s is the maximum limitation for most of users. To calculate the moving velocity by the difference of current positioning solution
and the previous solution
, one checking condition can found for the selection of the correct solution as:
where
is the sampling time of the system.
The solution of Equation (20) based on the accurate measurement of SPLs , is . Naturally, environmental corruptions, such as reverberation, interference, etc., are always contained in the measurement process of SPLs, hence the SPLs should be denoised before calculating Equations (8) and (20). For treating this noise reduction problem regarding the corrupted SPLs , an estimation design for effectively removing the environmental corruptions and purifying the SPLs is proposed. In the following, a systematic estimation design, combining RLS system modeling and a steady-state optimal estimator, is developed for denoising the corrupted SPLs.
2.3. System Modeling
Before estimating the correct SPLs via adopting an optimal estimation method, each of the received SPLs should first be mathematically modeled. Suppose a set of the measured SPLs can be described as:
where
is the set of all measured SPL data, and
, for
1 to 4 is the set of measured SPL data from the tagged sound sources.
The mathematical models of the received SPLs can be expressed as the following white-noise driven difference equation:
where
is the noisy measurement output of the tagged sound source
. Moreover,
and
are Gaussian white noise, with a zero mean and which are uncorrelated with
.
, for
i = 1, …,
m are identifiable system parameters of the tagged sound source
, and
is the system order.
A regressive form is used to express the difference equation in Equation (23):
where
is the regression vector which contains the measured SPL data, and
is the parameter vector.
Equation (25) can be further formulated as a state space form, as follows:
where
,
and
is the state vector, and
and
are white noises.
Remark 1. The system order m is a user decided parameter. Theoretically, a more accurate model can be found by increasing this system order. Surely, a high order system needs more calculation time and storage memory. There exists a tradeoff when selecting the system parameter m. System parameters , for 1 to m can be optimally calculated by several identification methods, such as the recursive least squares method (RLS), the stochastic subspace identification method (SSI), and the system realization using information matrix (SRIM). In this investigation, the system parameters in Equation (23) will be optimally determined by the RLS method.
The RLS algorithm is often used for searching the optimal parameters of systems with a set of unknown parameters by using the input and output measured raw data. The standard identification process of this algorithm can be expressed as follows:
where
is the estimation of the coefficient covariance at time instant
,
is the identified parameter,
is the input data,
is the prediction error,
is the measurement output, and
is the forgetting factor. The range of forgetting factor
is usually given within 0.95 to 1.
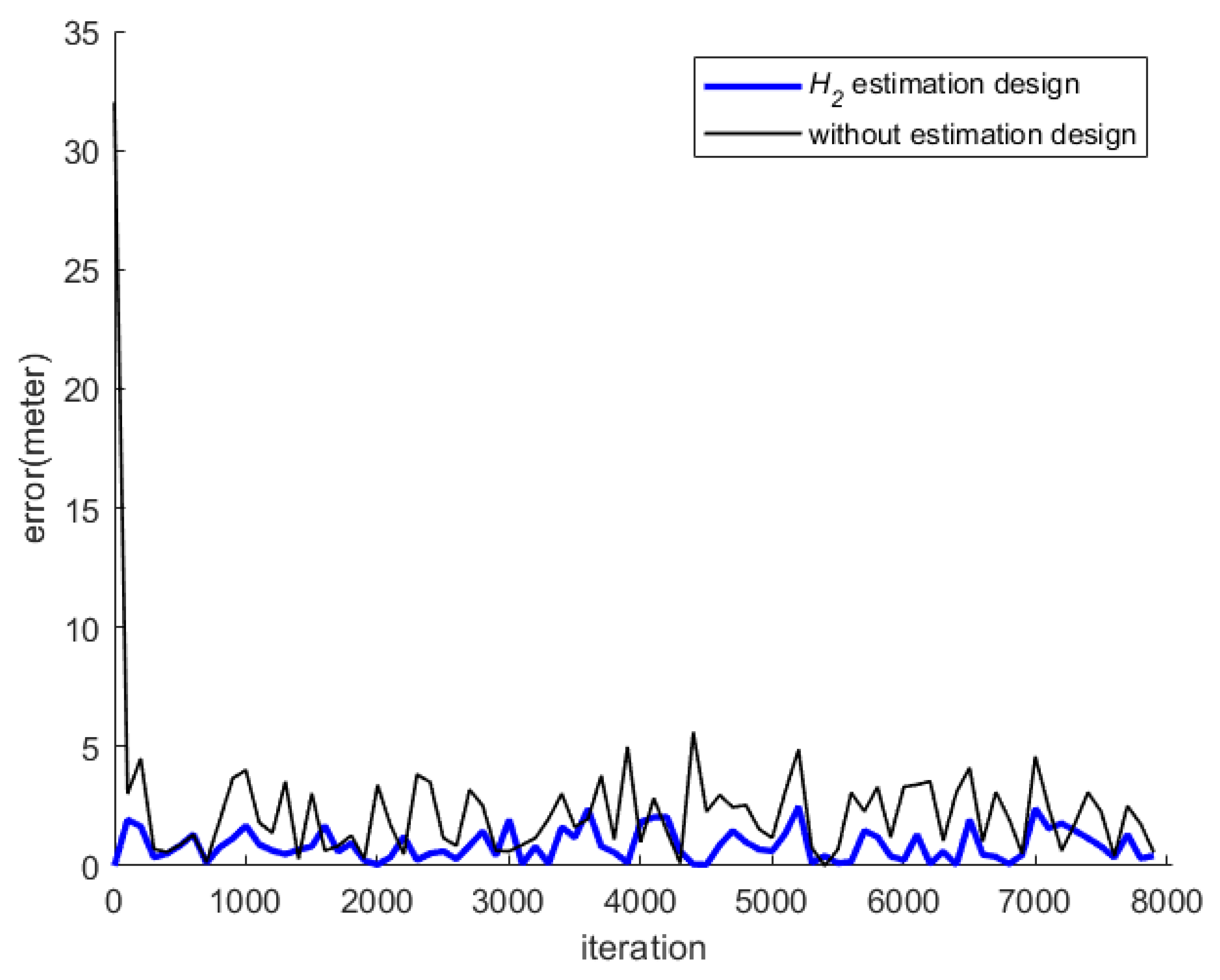
2.4. H2 Estimation Design
Based on the identified system parameters in Equation (30), an H2 estimator is proposed for eliminating the influence of the environmental corruptions.
Equations (26) and (27) represent the state-space system of measured SPLs, and the purified SPLs
can be reconstructed as:
where
is a constant matrix that is set up to draw out the purified SPL
from state vector
. The designed target is to hunt for the estimation
from the measured SPL
, which is corrupted by environmental noises; hence, the state estimator for purifying the corrupted SPL is formulated as the following:
where
is the designed estimation gain in a steady state.
Define the estimation error between purified SPL signal and estimation signal as follows:
where
The performance index of the
H2 estimation design of the indoor positioning problem can be expressed by using the mean square error of estimation error
as:
where
Furthermore, Equation (34) can be presented as:
From Equation (26), the estimation error
at a steady state can be described as:
After some mathematical derivations, the H2 estimation design for background noise reduction of the indoor positioning design could be summarized as the following Theorem 1.
Theorem 1. An H2 steady state estimator for the indoor positioning problem can be constructed if a positive-definite matrix can be found such that the following LMIs hold
where , and the steady state covariance of the estimation error is bounded by From Equation (37), and can be computationally calculated. Based on these two parameters, the estimation gain of the H2 estimation design can be obtained by using . Additionally, by substituting into Equation (32), the H2 estimator can be constructed.
The process of constructing the proposed H2 estimation design is summarized in the following steps:
Step 1. Given the , as identity matrices, and as a constant matrix based on the extraction of desired state variables.
Step 2. Solve the LMI form of Equation (37) for obtaining the positive matrix and .
Step 3. Calculate the estimation gain based on solutions of and in Step 2.
Step 4. Substituting the estimation gain into Equation (32), the estimation design can be constructed as Equation (39).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}