
Comparative Analysis of Supersonic Flow in Atmospheric and Low Pressure in the Region of Shock Waves Creation for Electron Microscopy

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
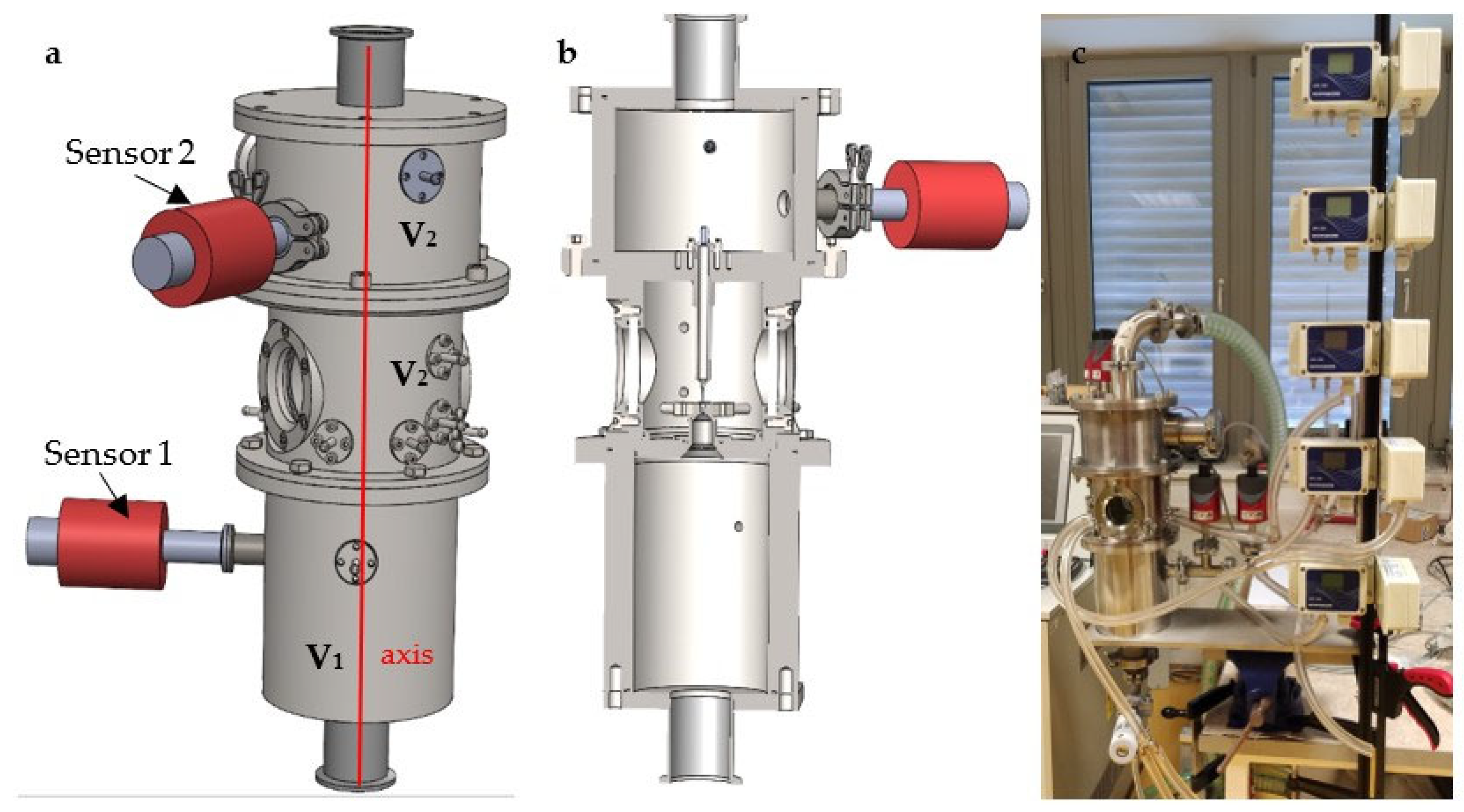
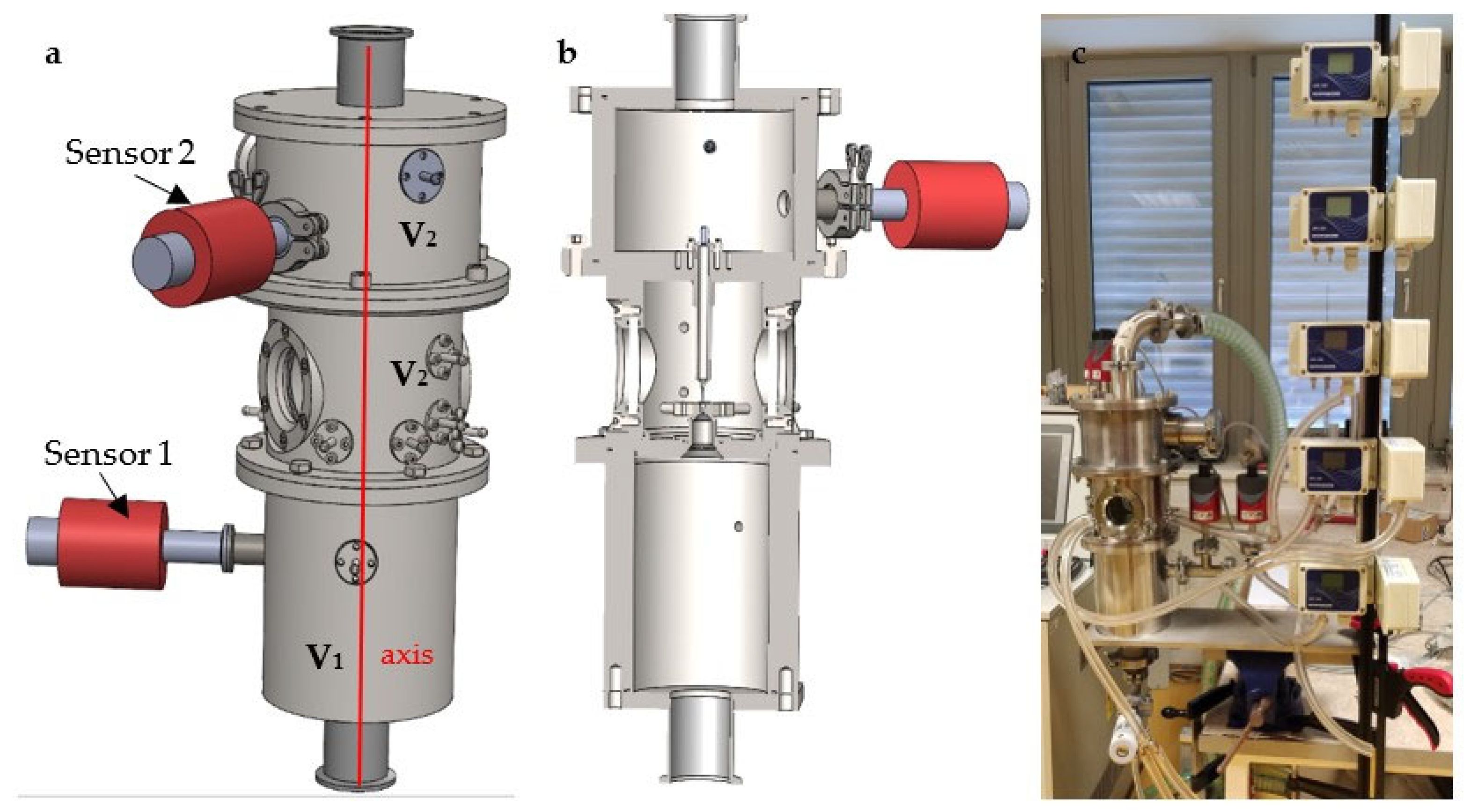
2. Experimental Chamber
3. Methodology
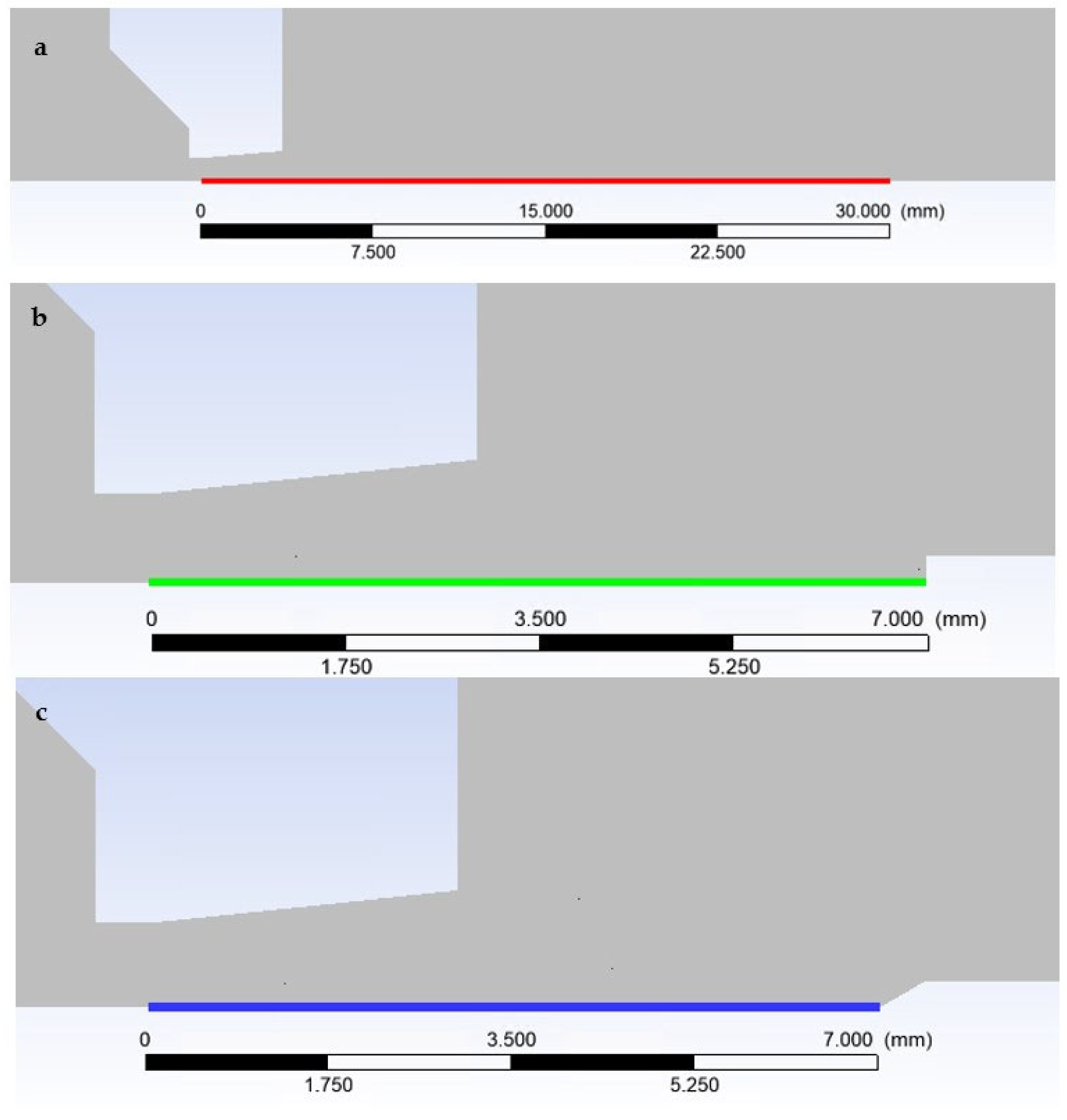
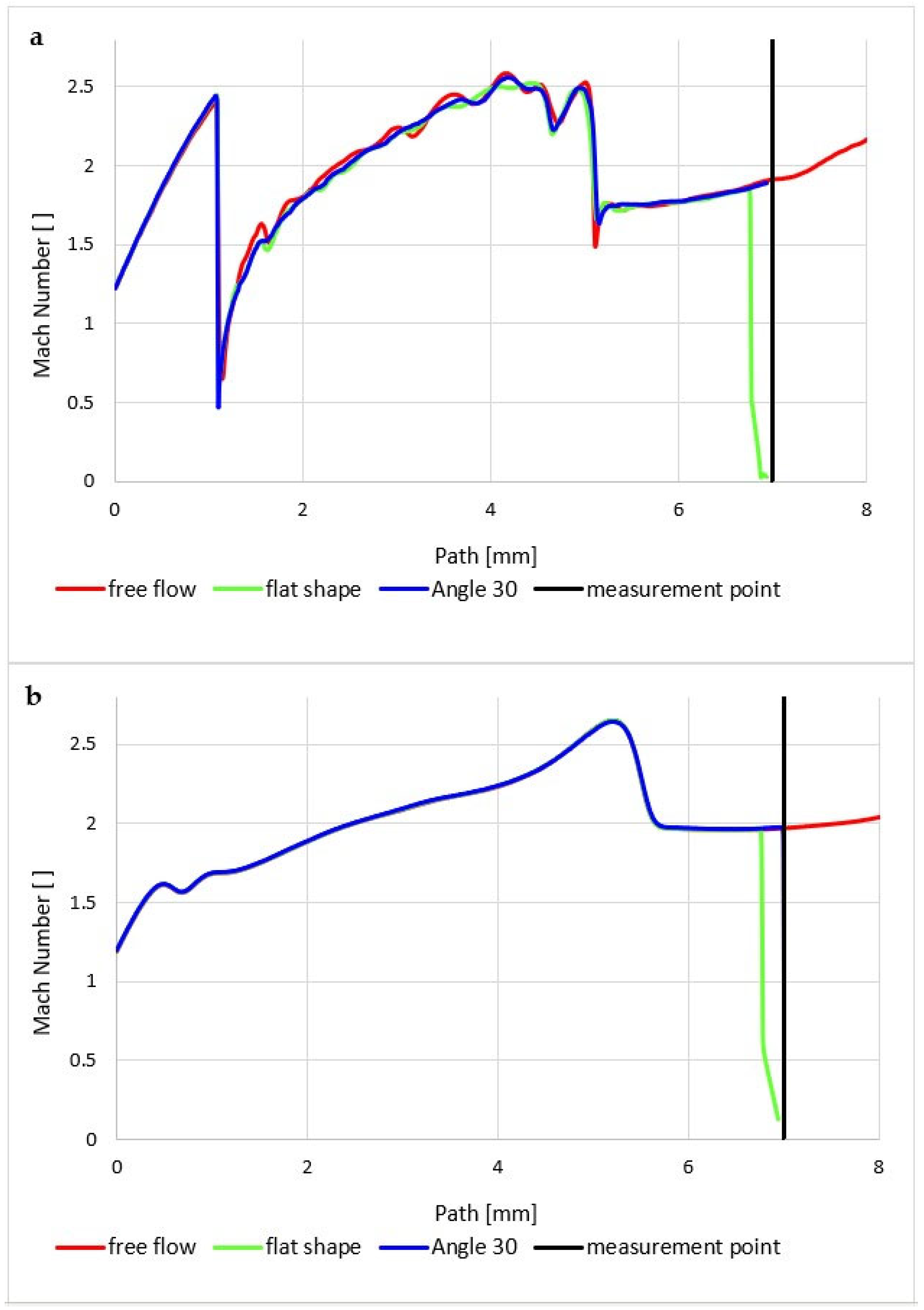
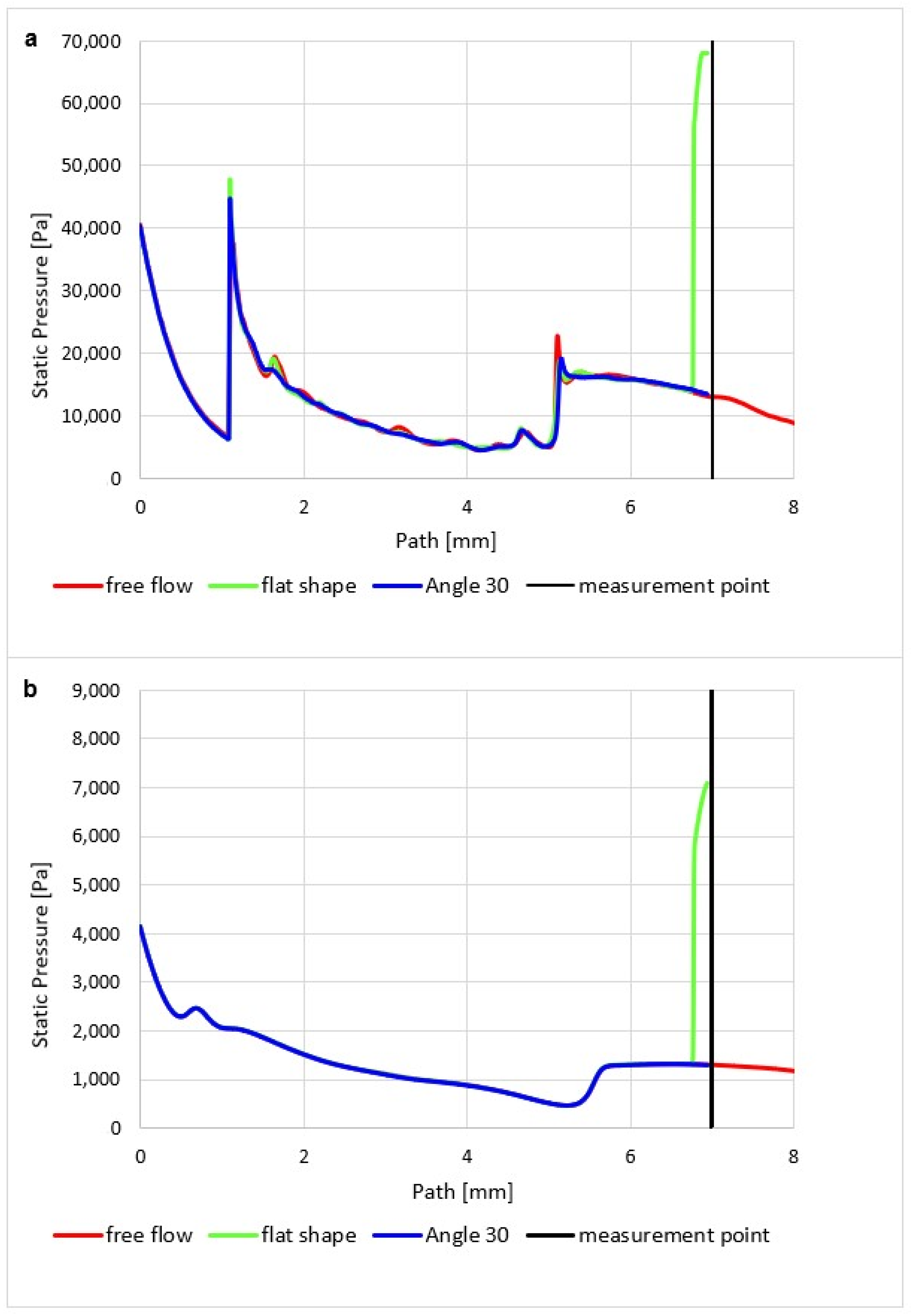
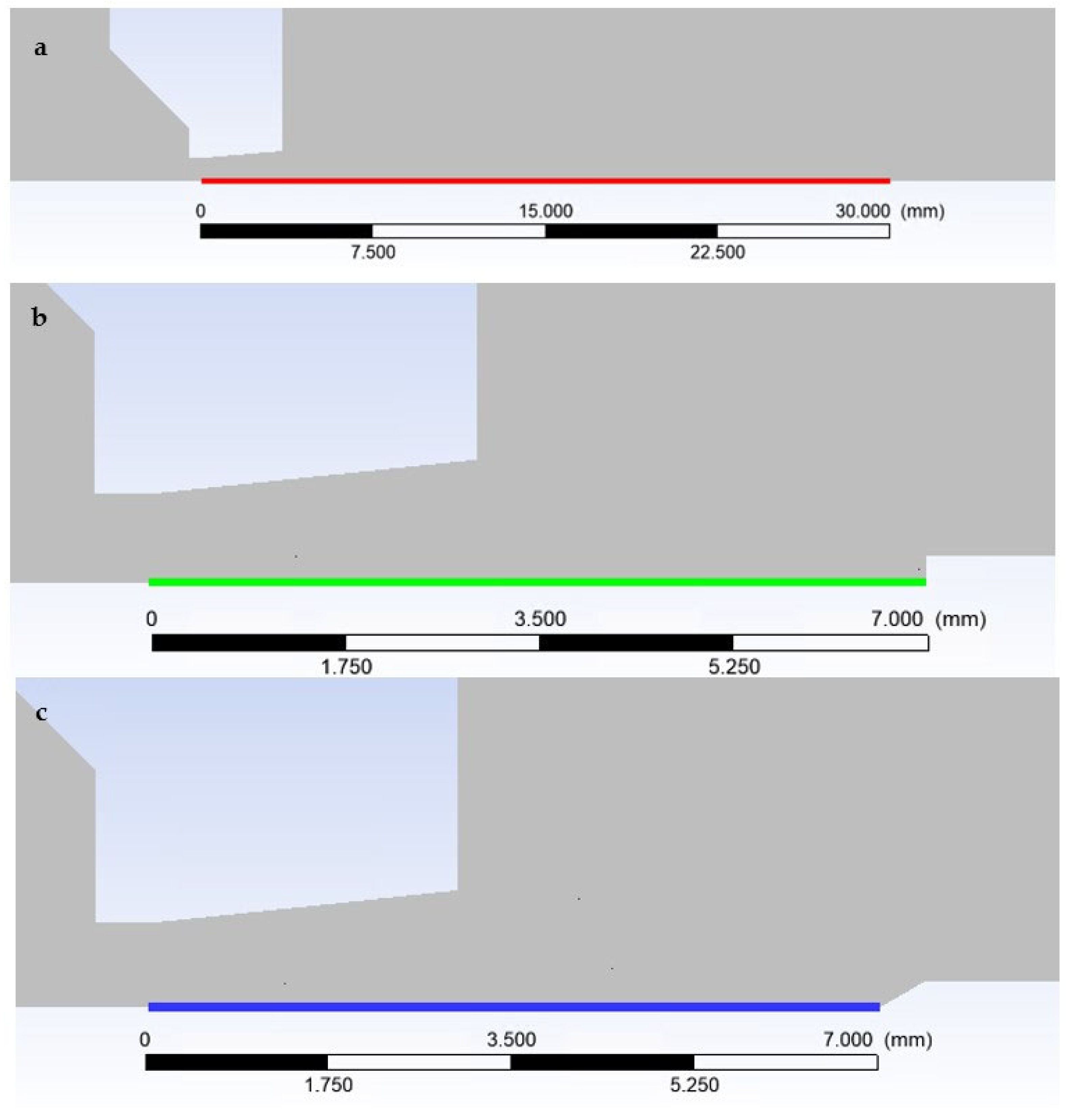
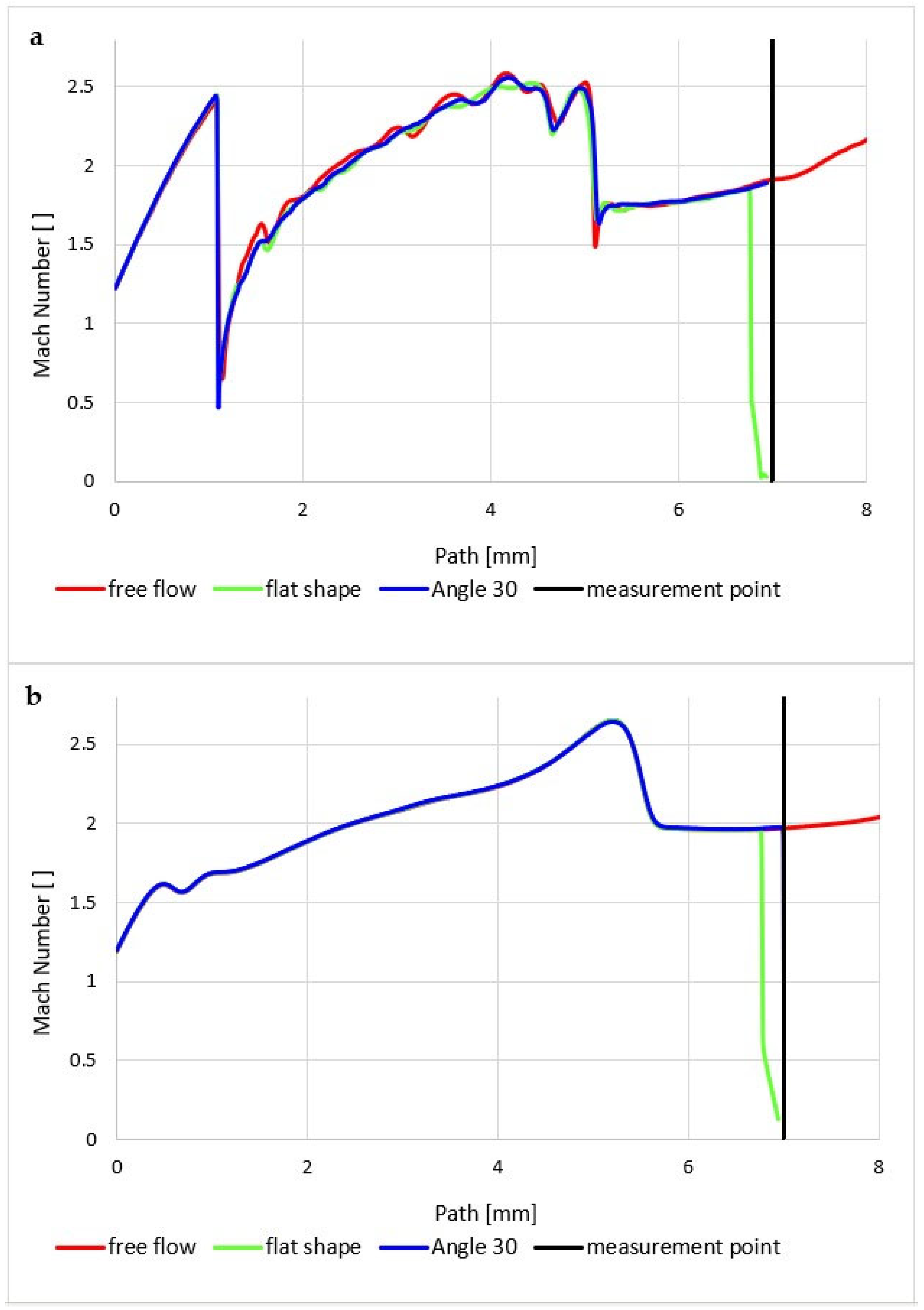
- Flow in free space, in an intact environment—Free Flow.
- Flow in an environment with an inserted temperature sensor with a flat end—Flat shape.
- Flow in an environment with an inserted temperature sensor with a conical end—Angle 30°.
- Incompressible regime
- Compressible subsonic regime
- Compressible supersonic regime
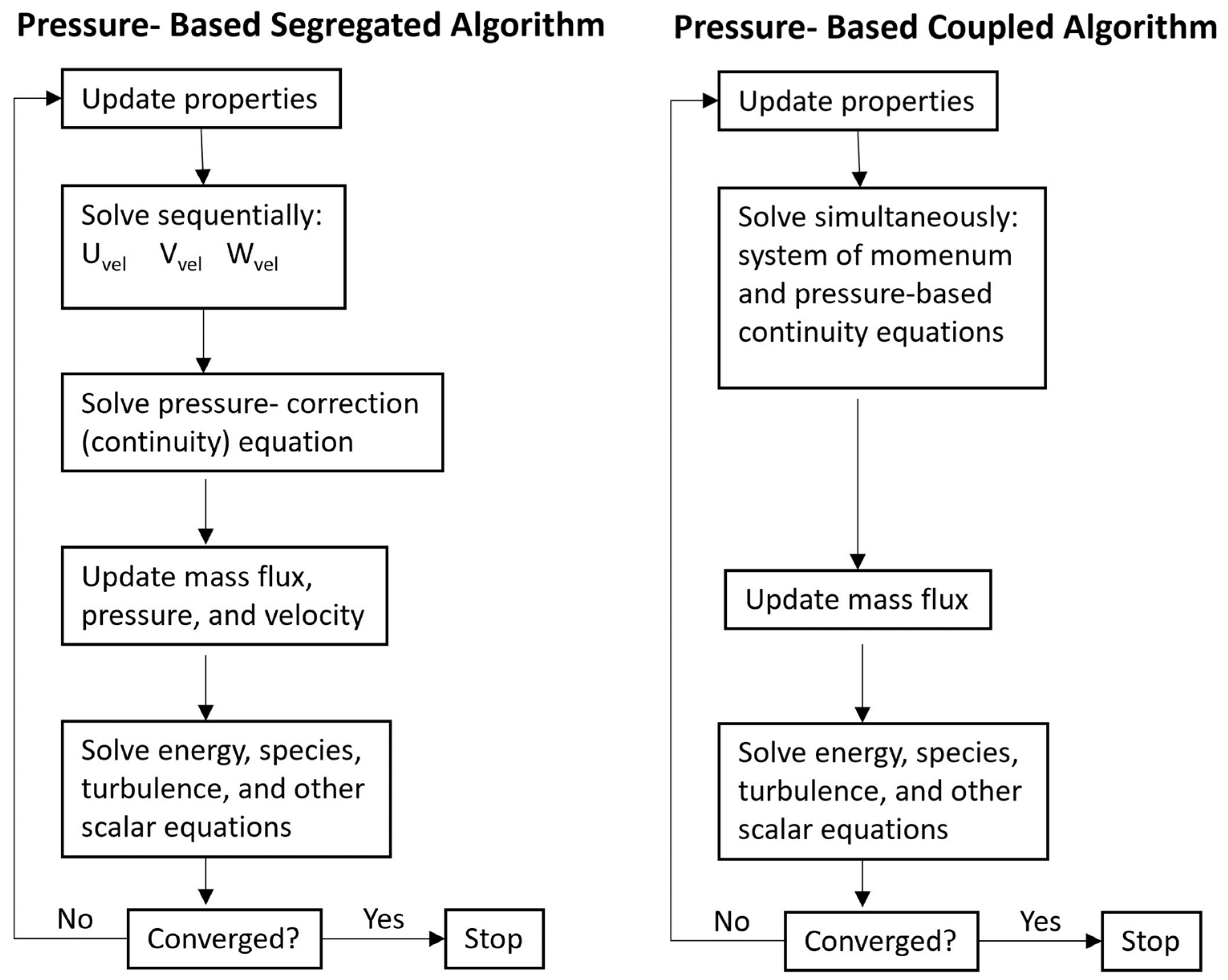
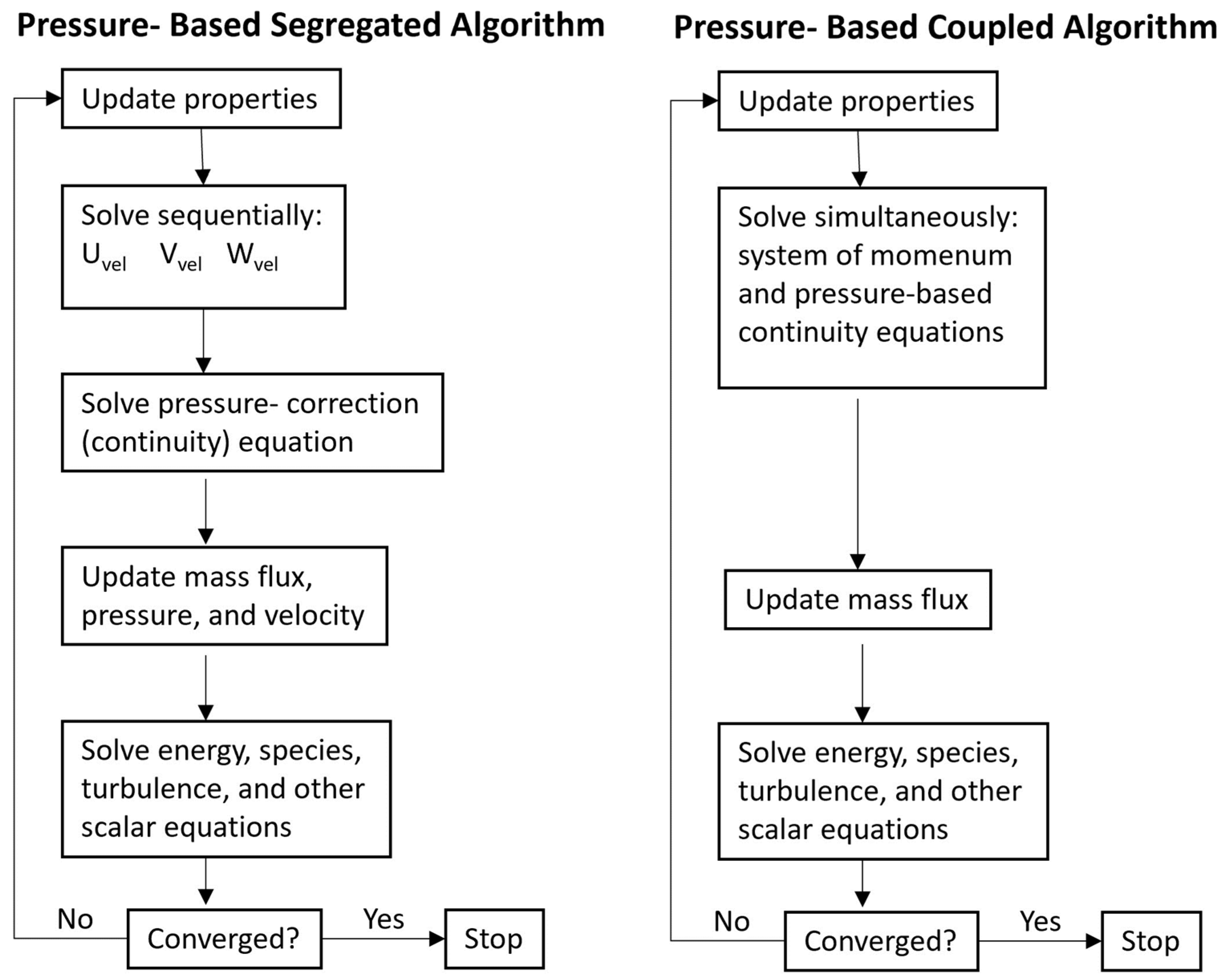
Simulation Settings in the Ansys Fluent System
- Provides exact resolution of contact and shock discontinuities
- Preserves positivity of scalar quantities
- Free of oscillations at stationary and moving shocks
4. Theoretical Materials
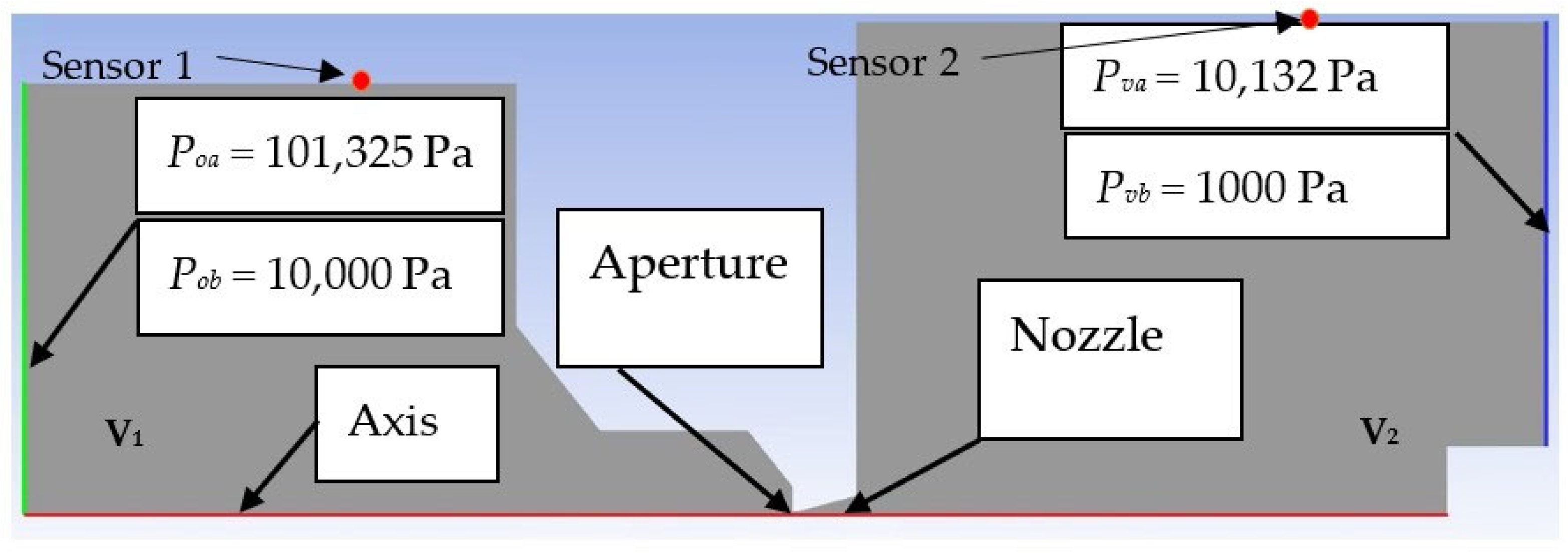
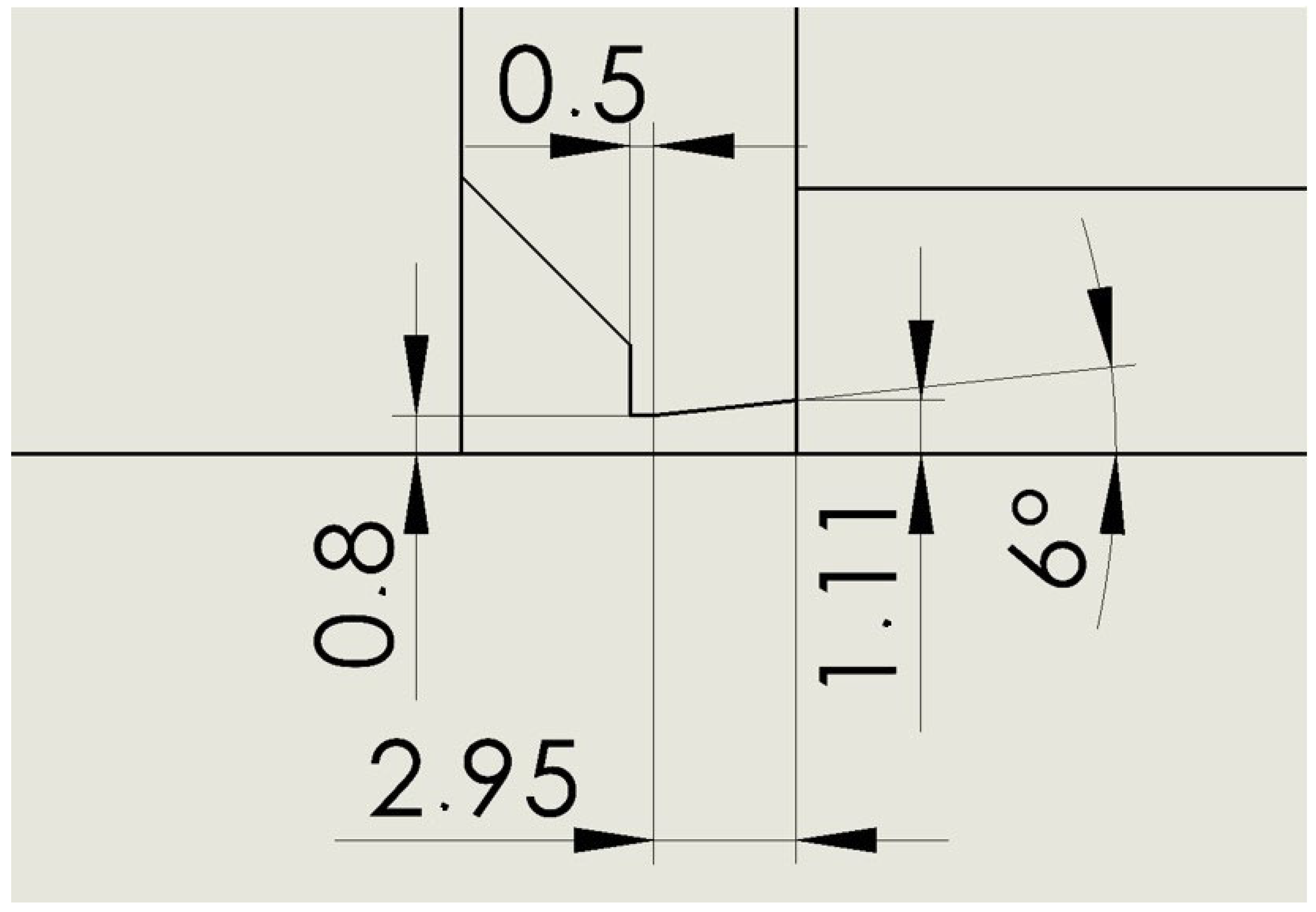
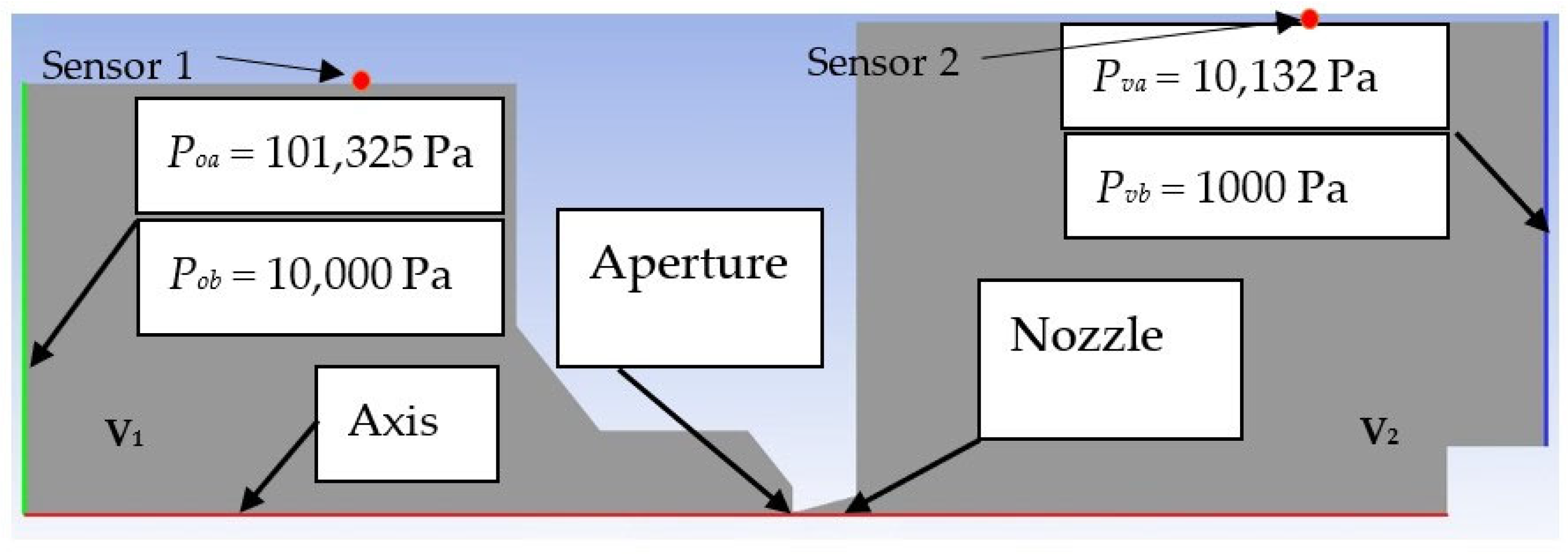
4.1. Determination of the Computational Cross-Section
4.2. Gas Flow Regimes
- Incompressible Regime
- Subsonic Compressible Regime
- Supersonic Compressible Regime
4.2.1. Incompressible Regime
4.2.2. Subsonic Compressible Regime
4.2.3. Supersonic Compressible Regime
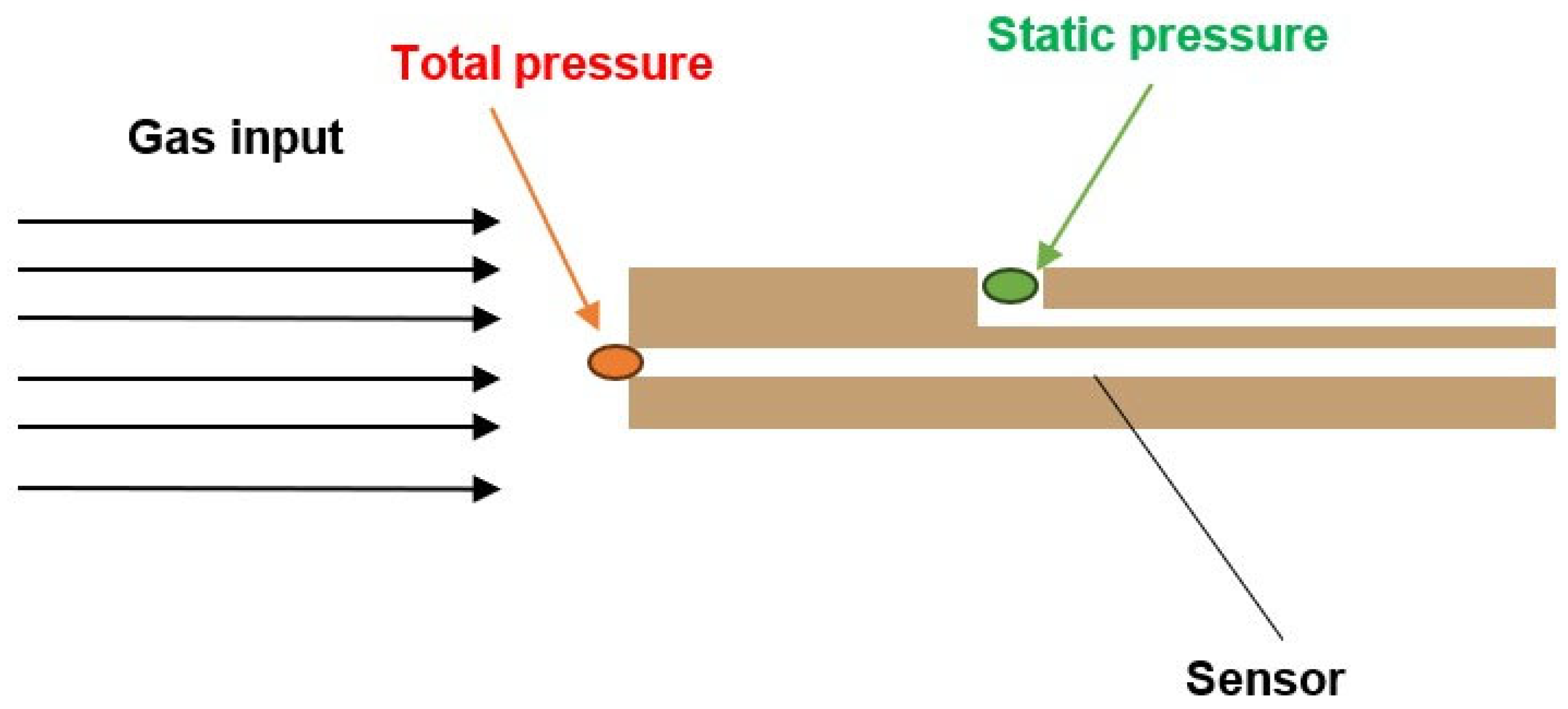
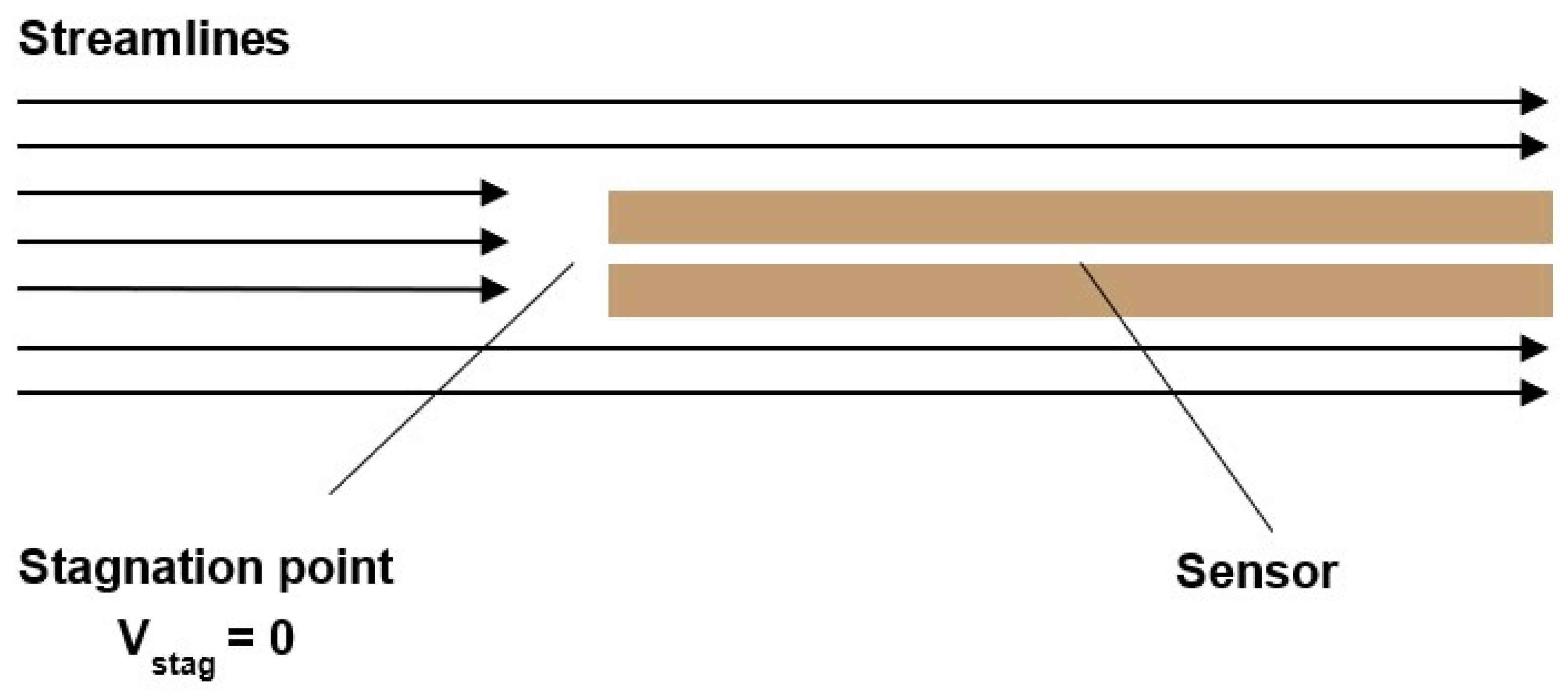
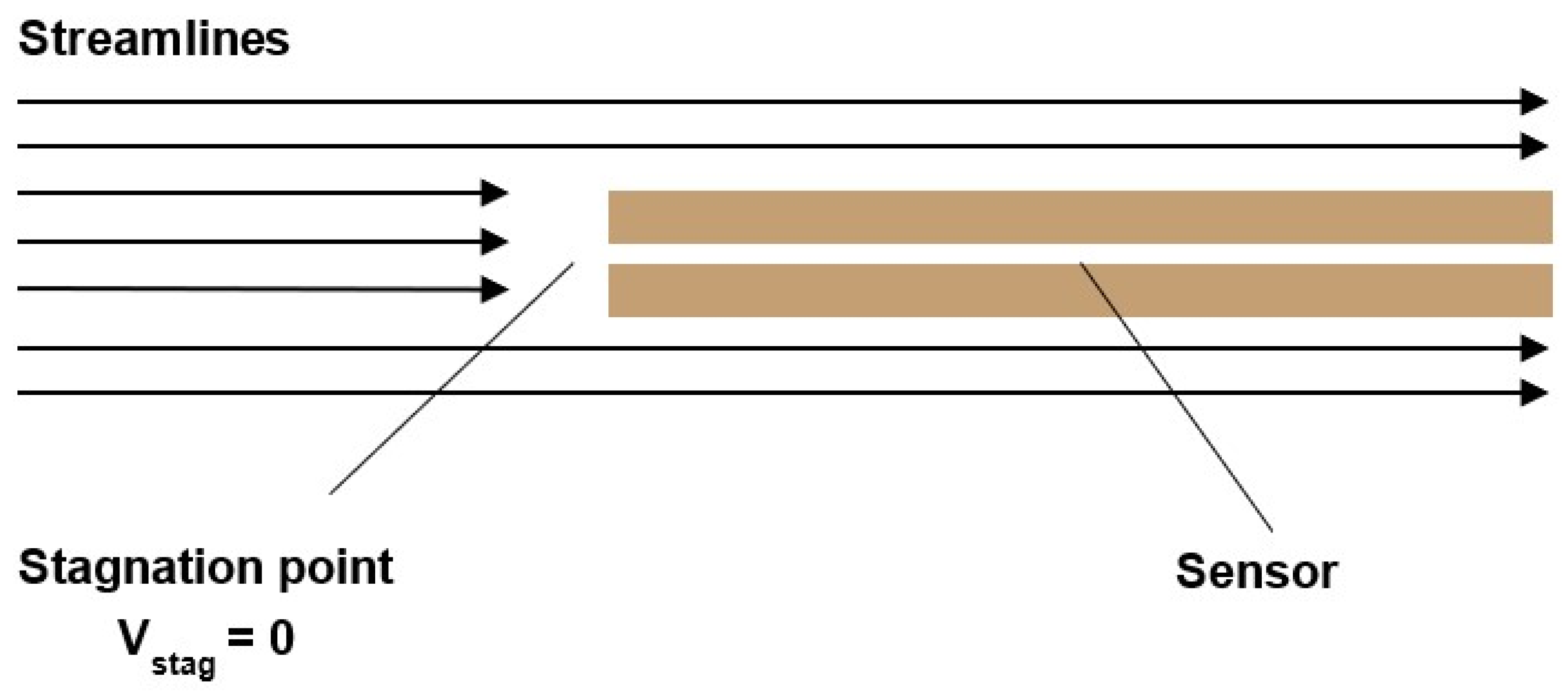
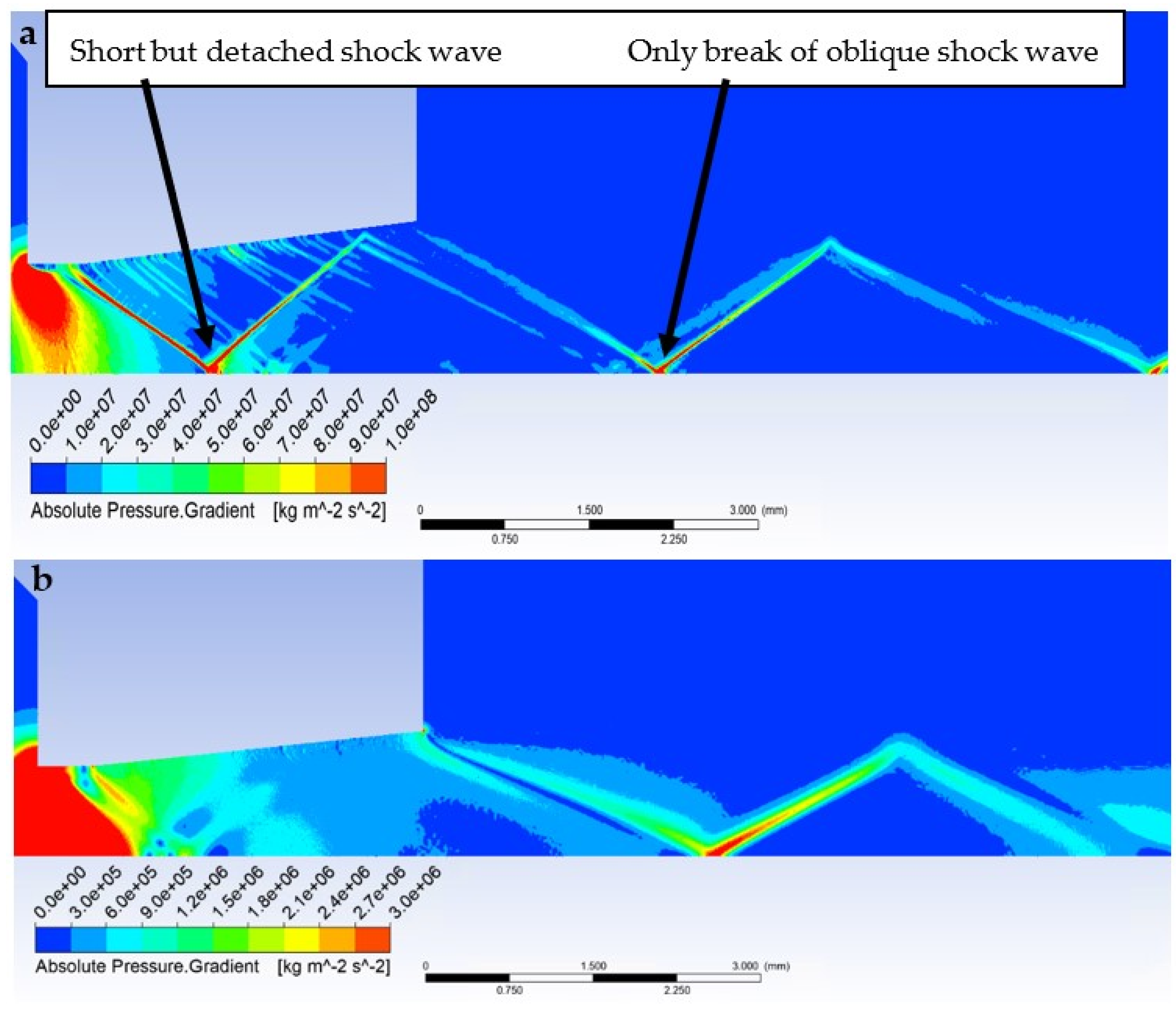
4.3. Temperature Measurement
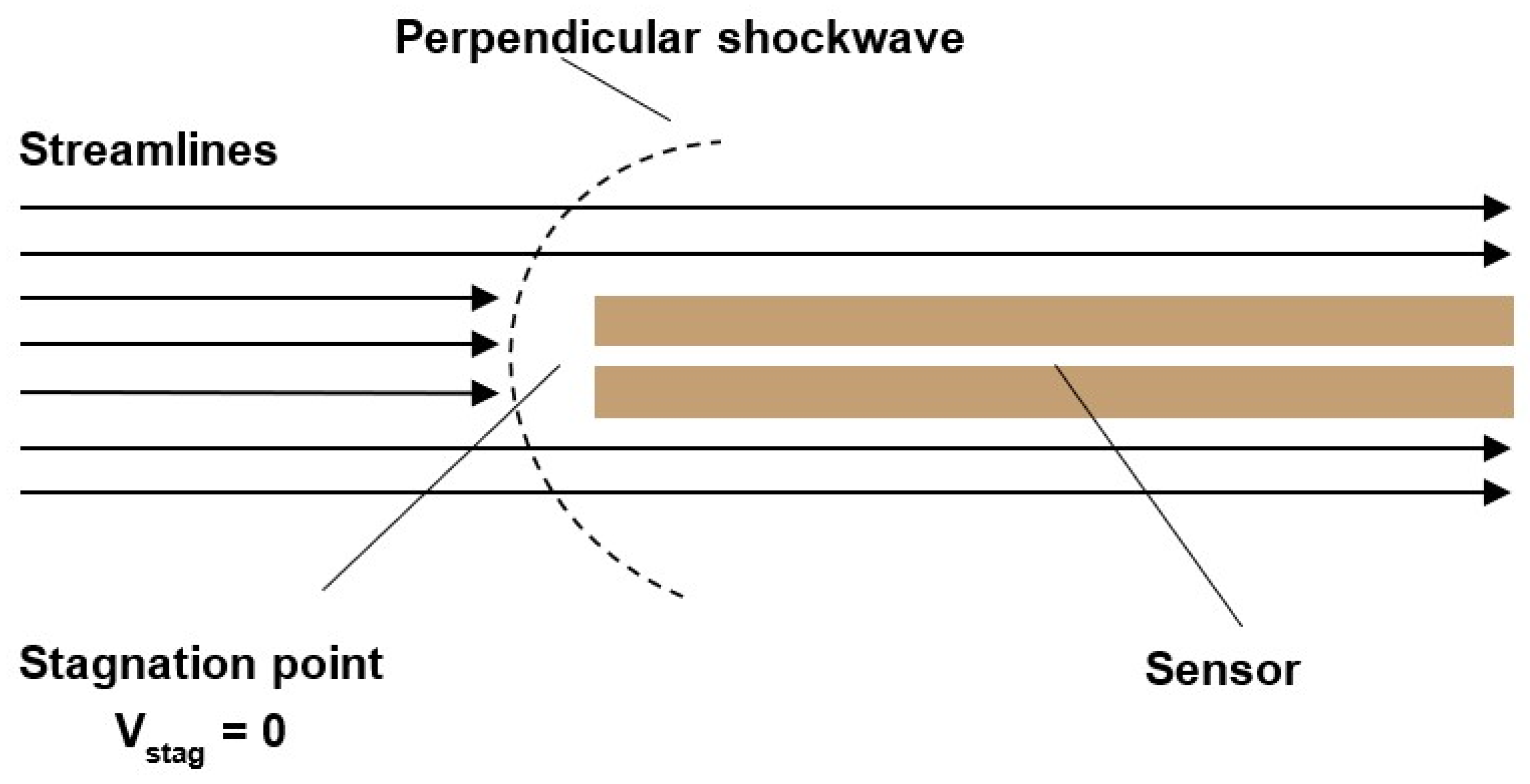
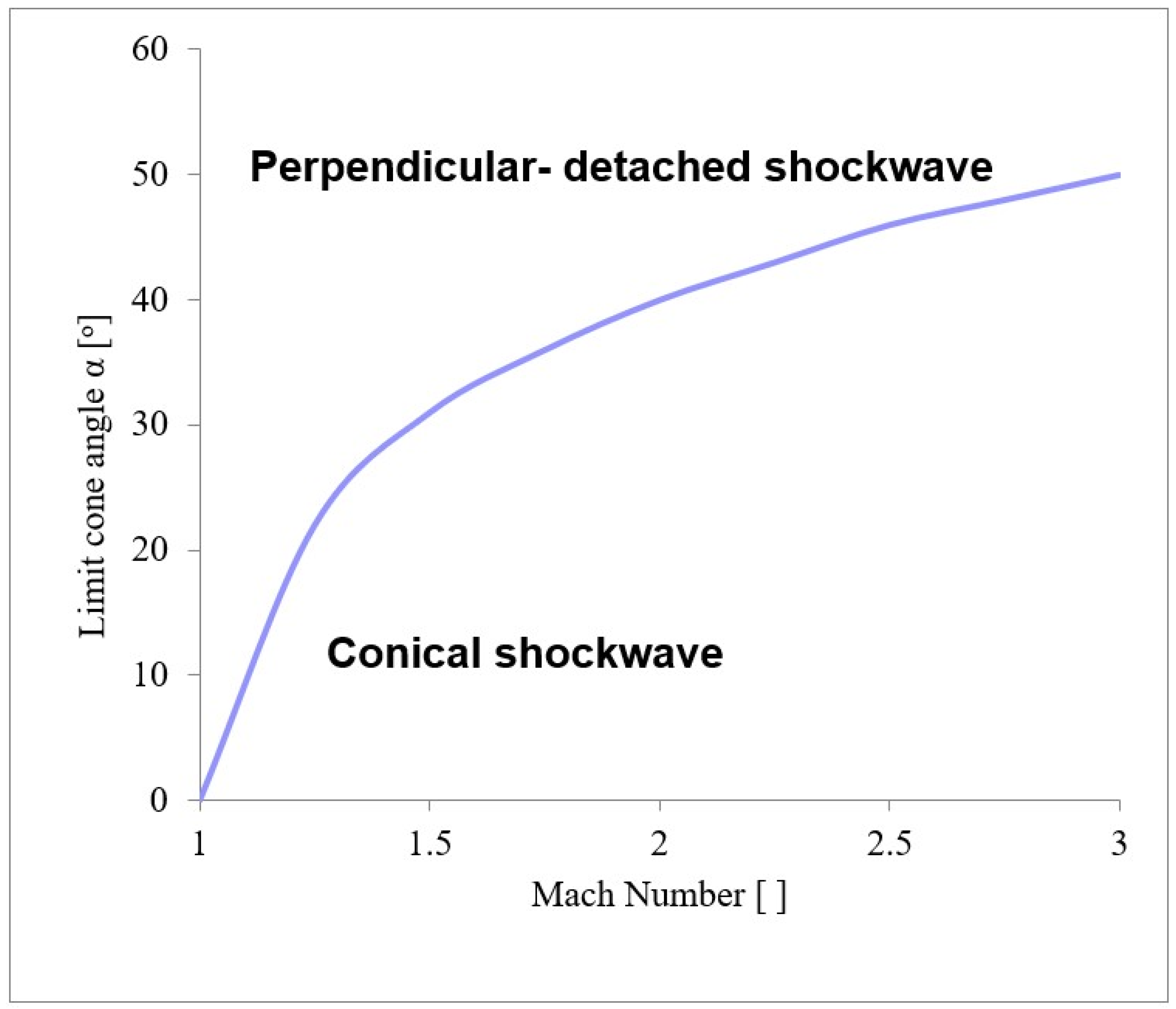
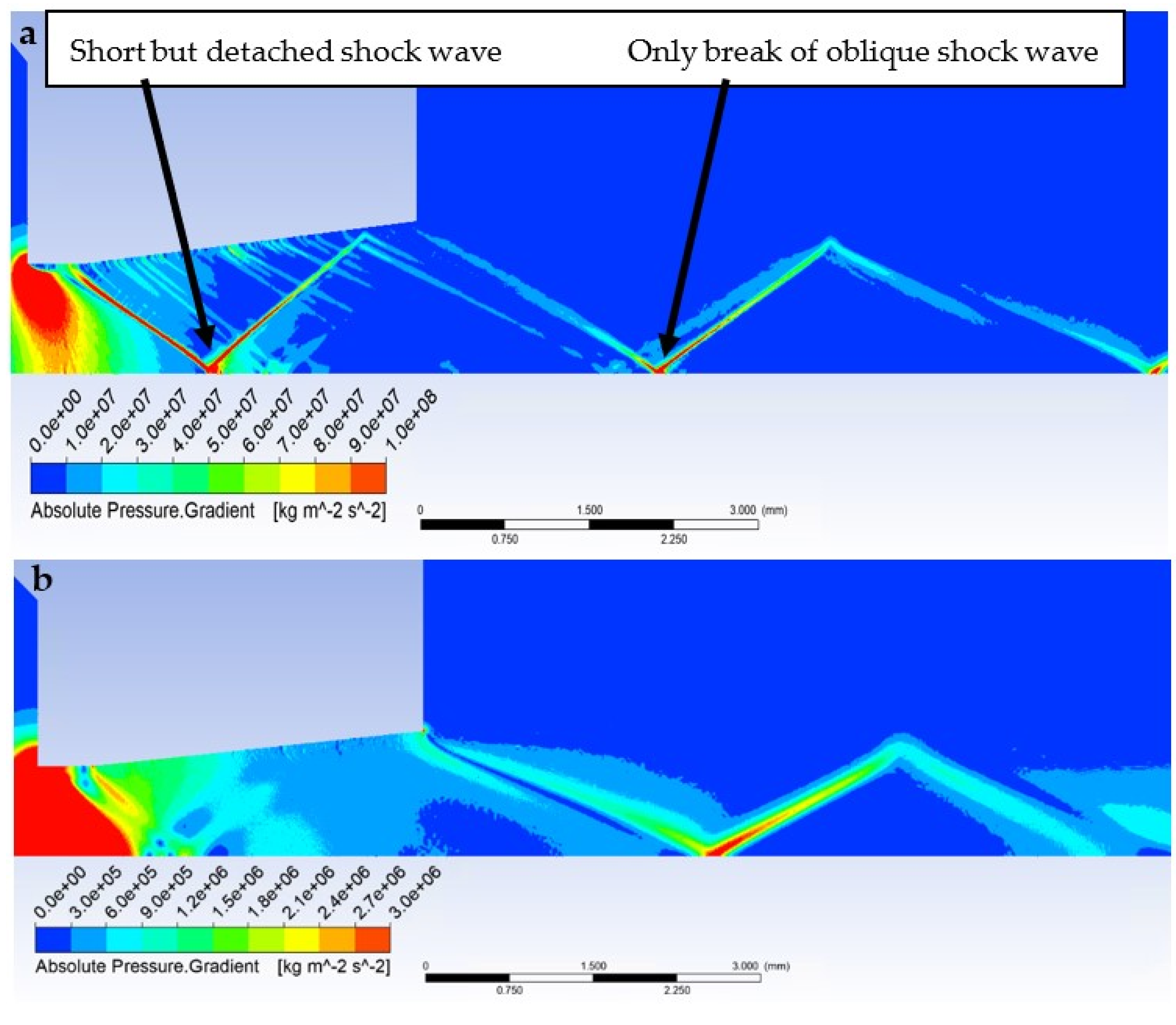
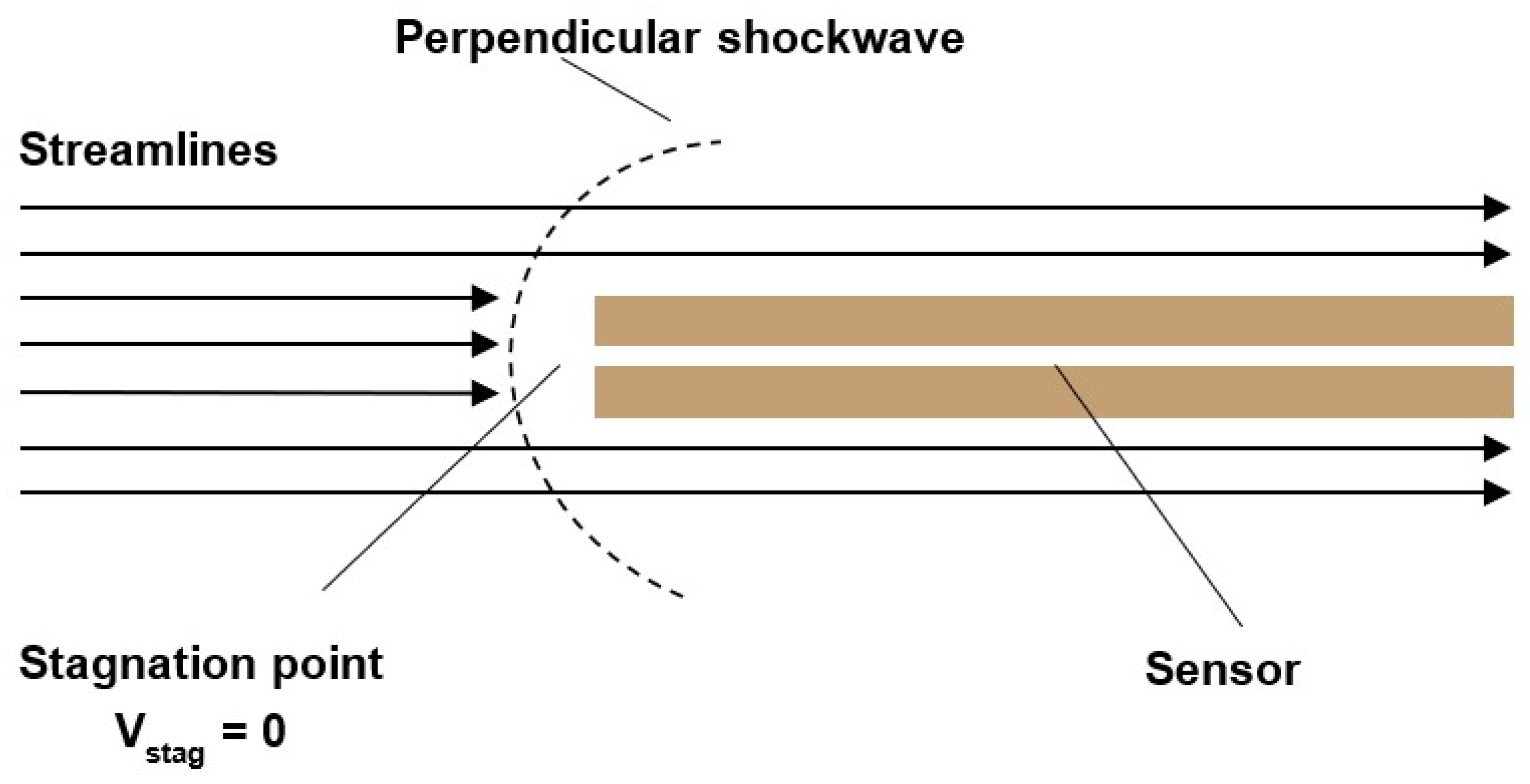
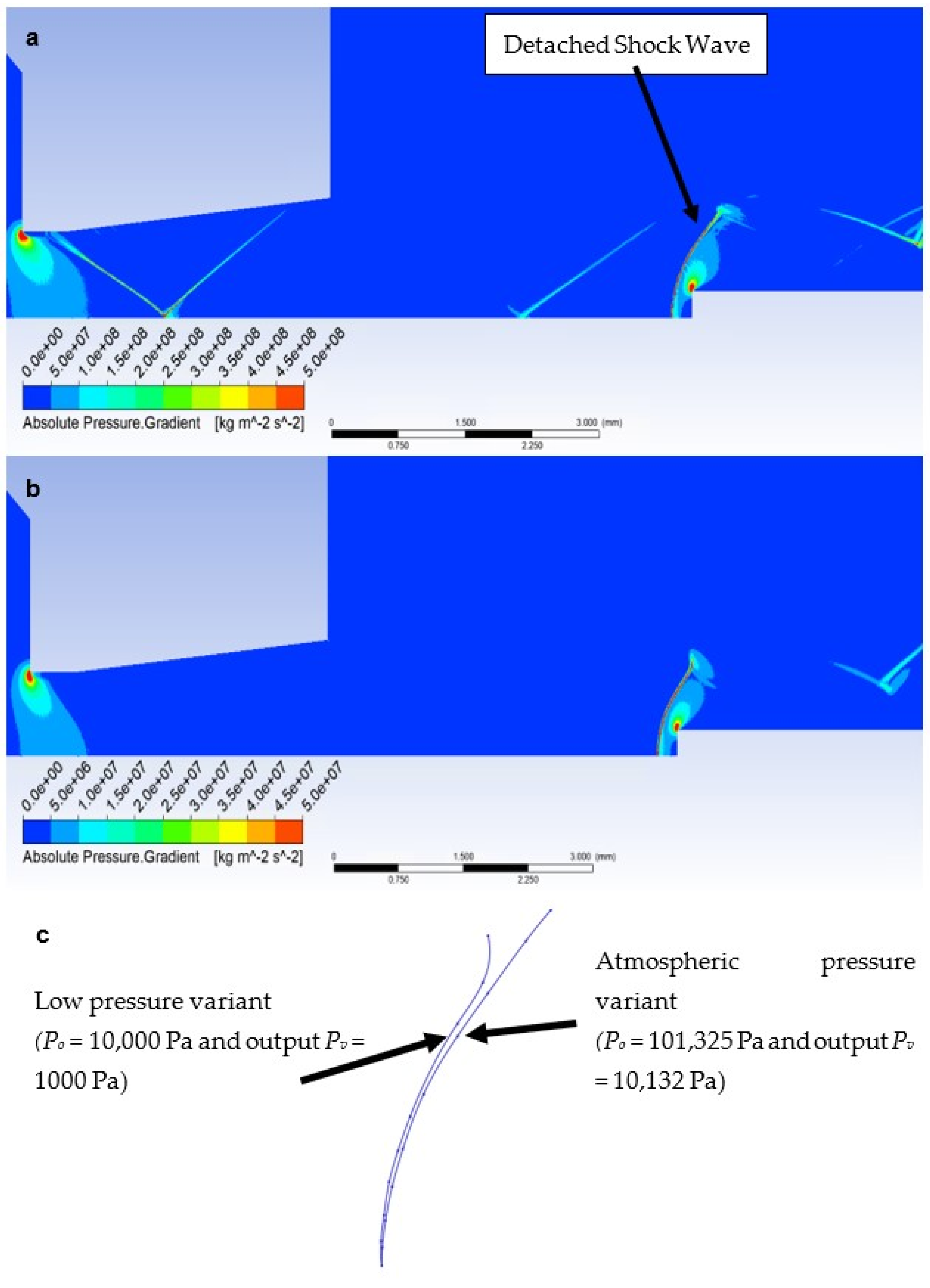
4.4. Perpendicular—Detached Shock Wave
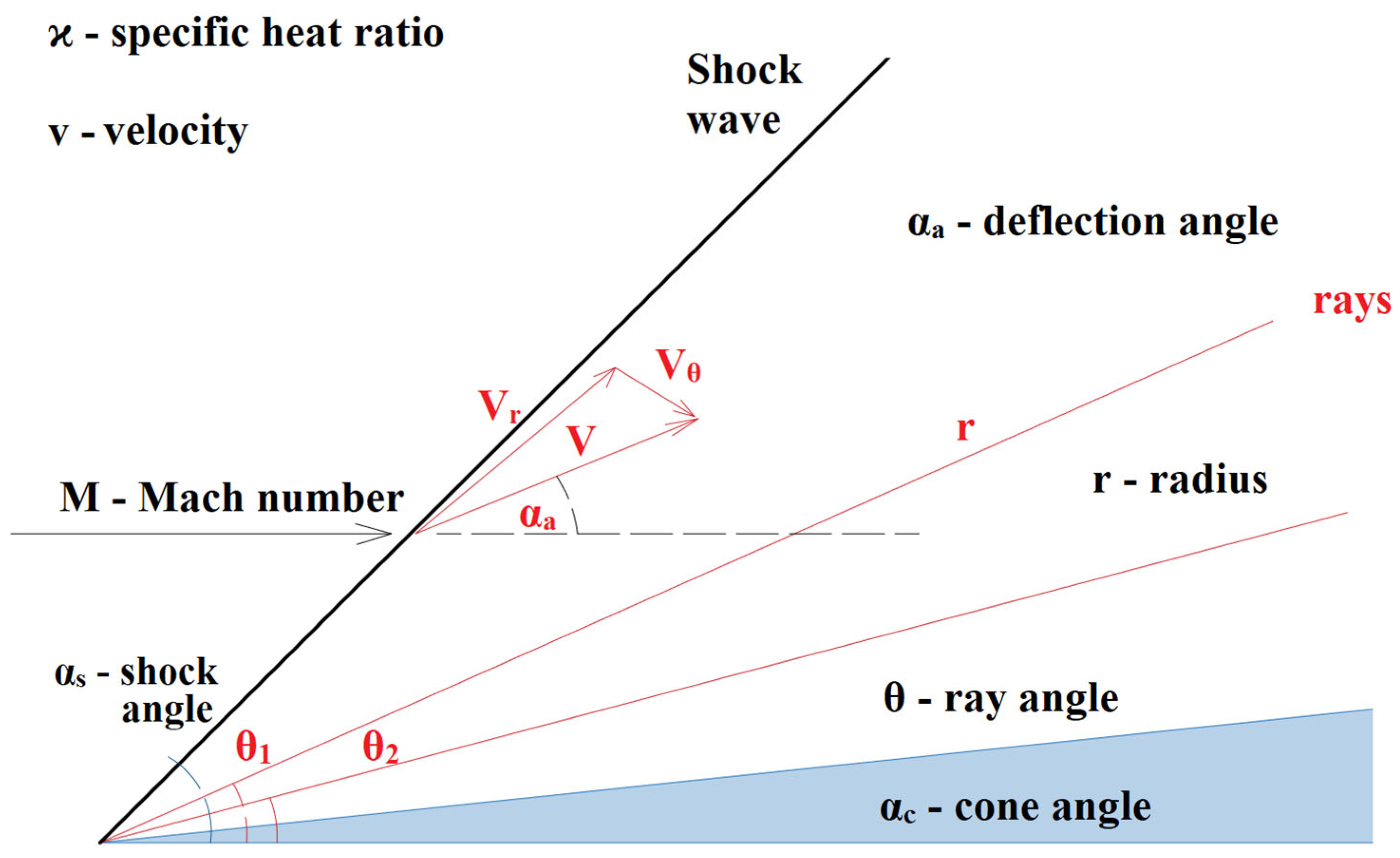
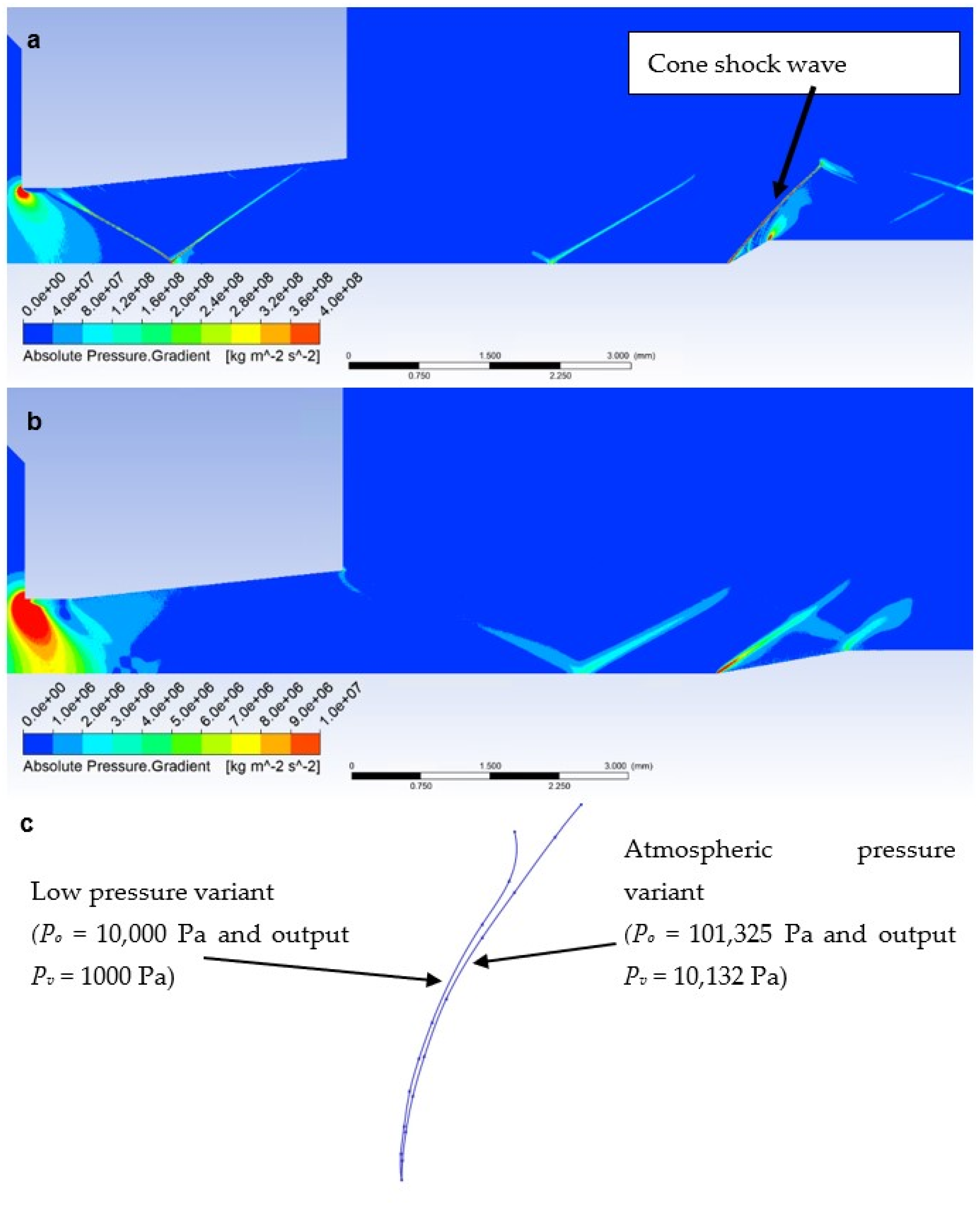
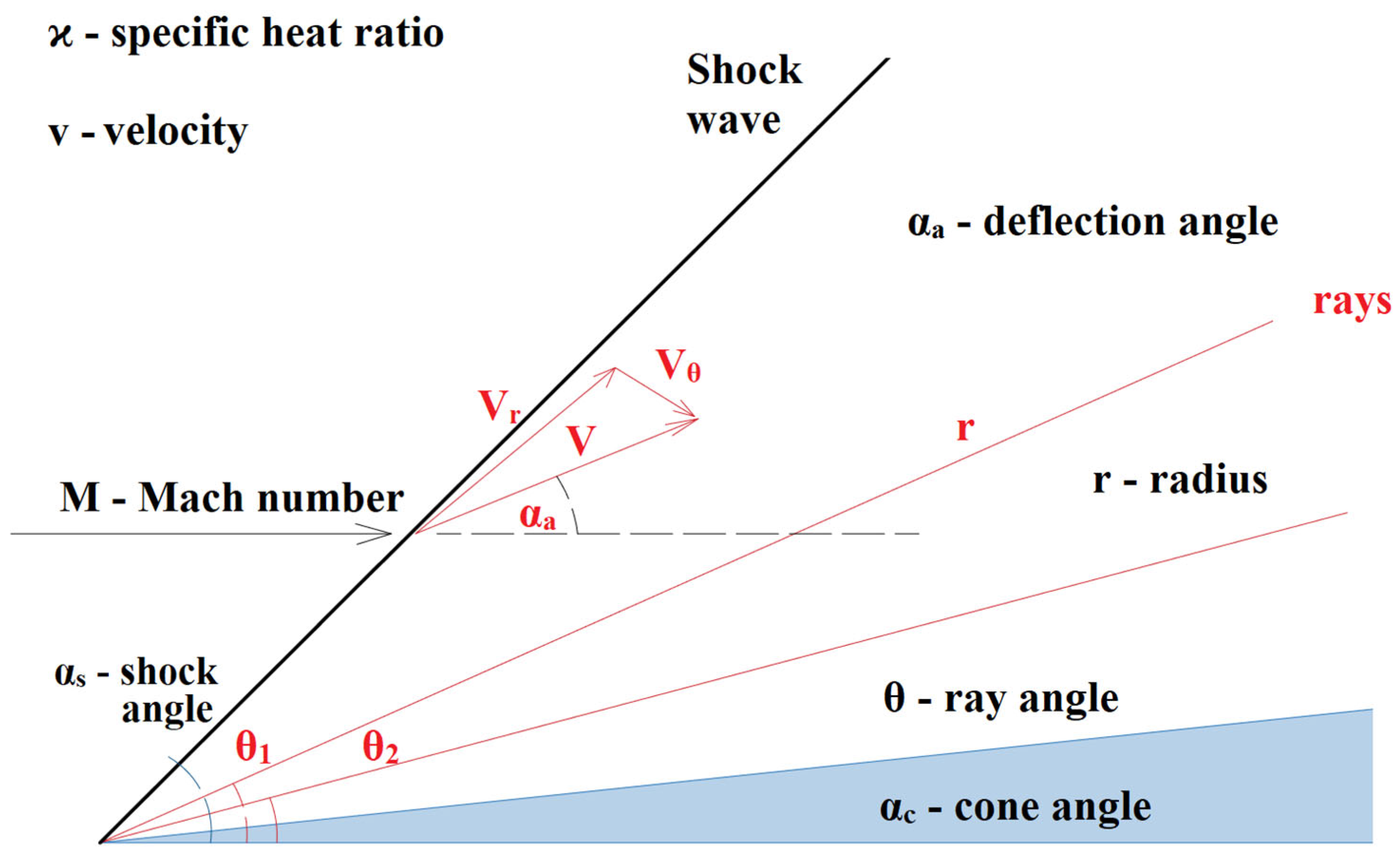
4.5. Cone Shock Wave
5. Results
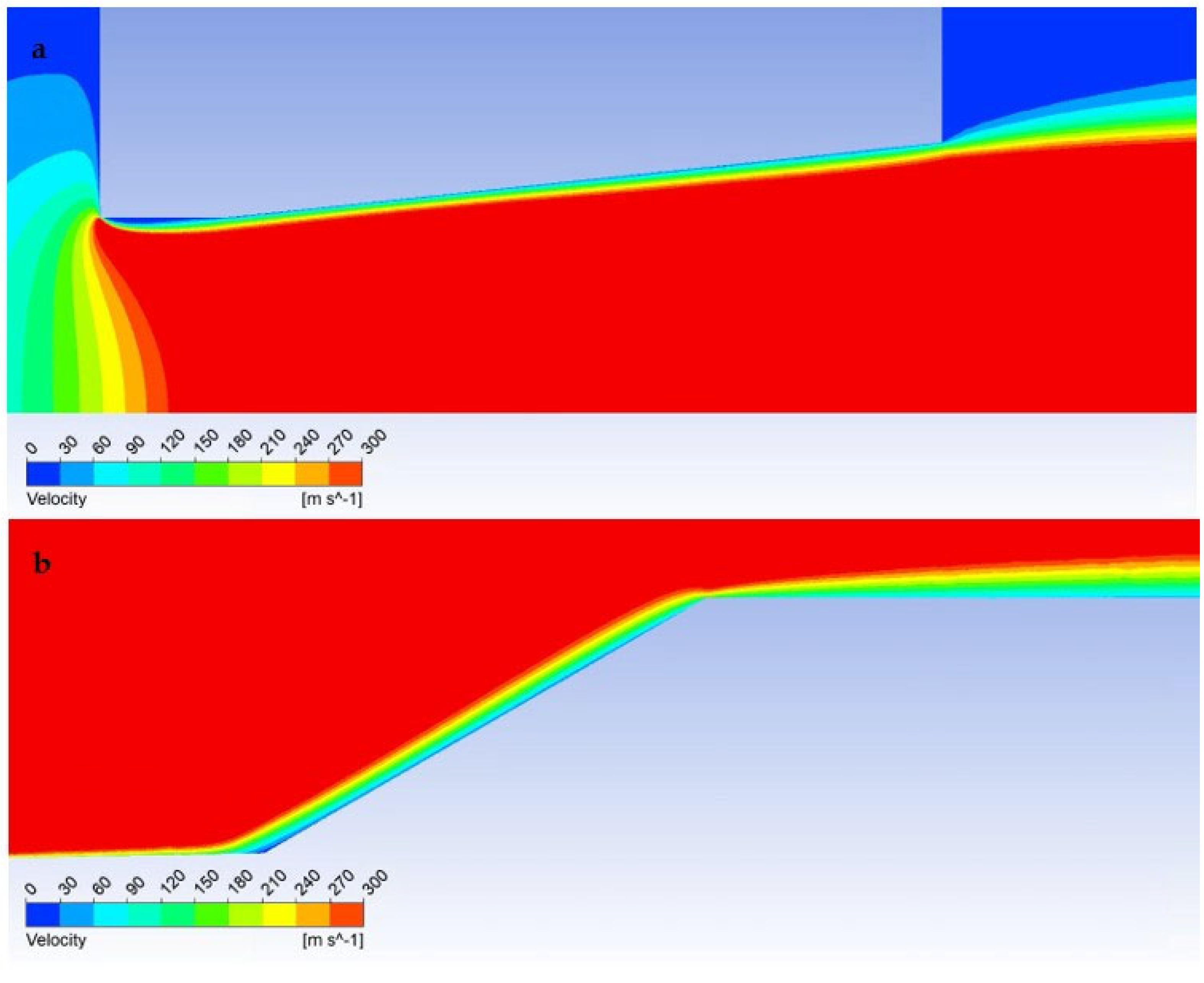
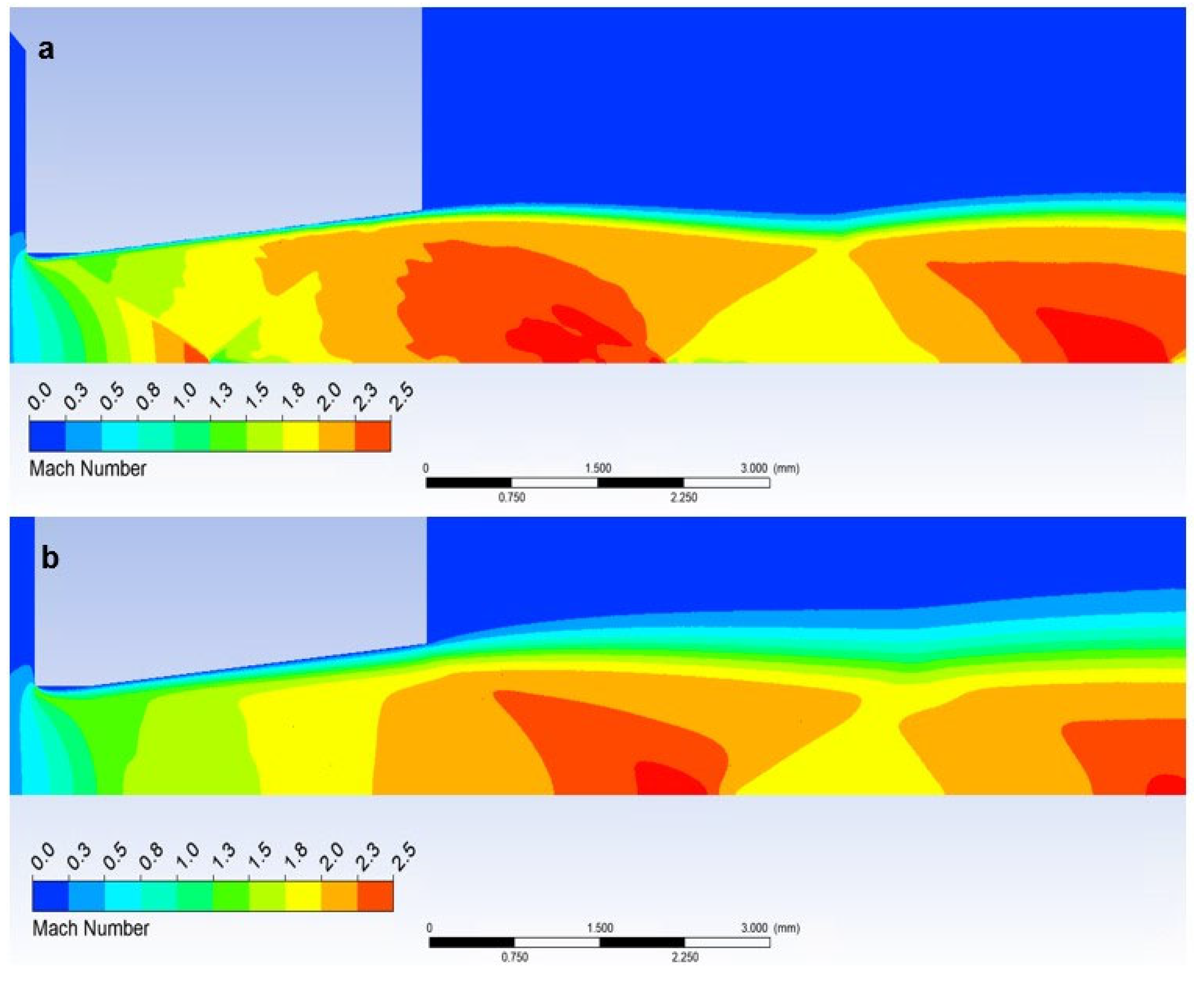
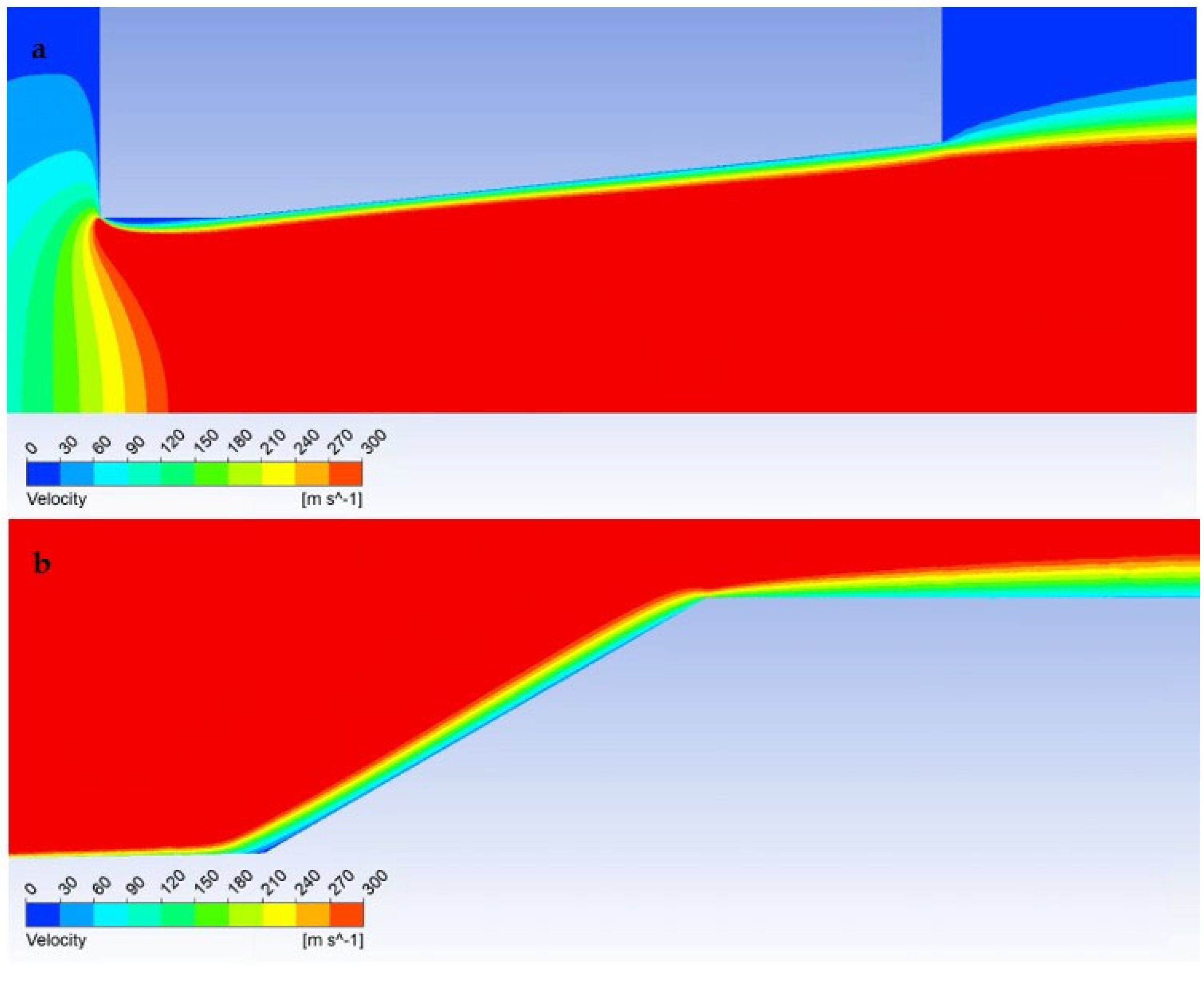
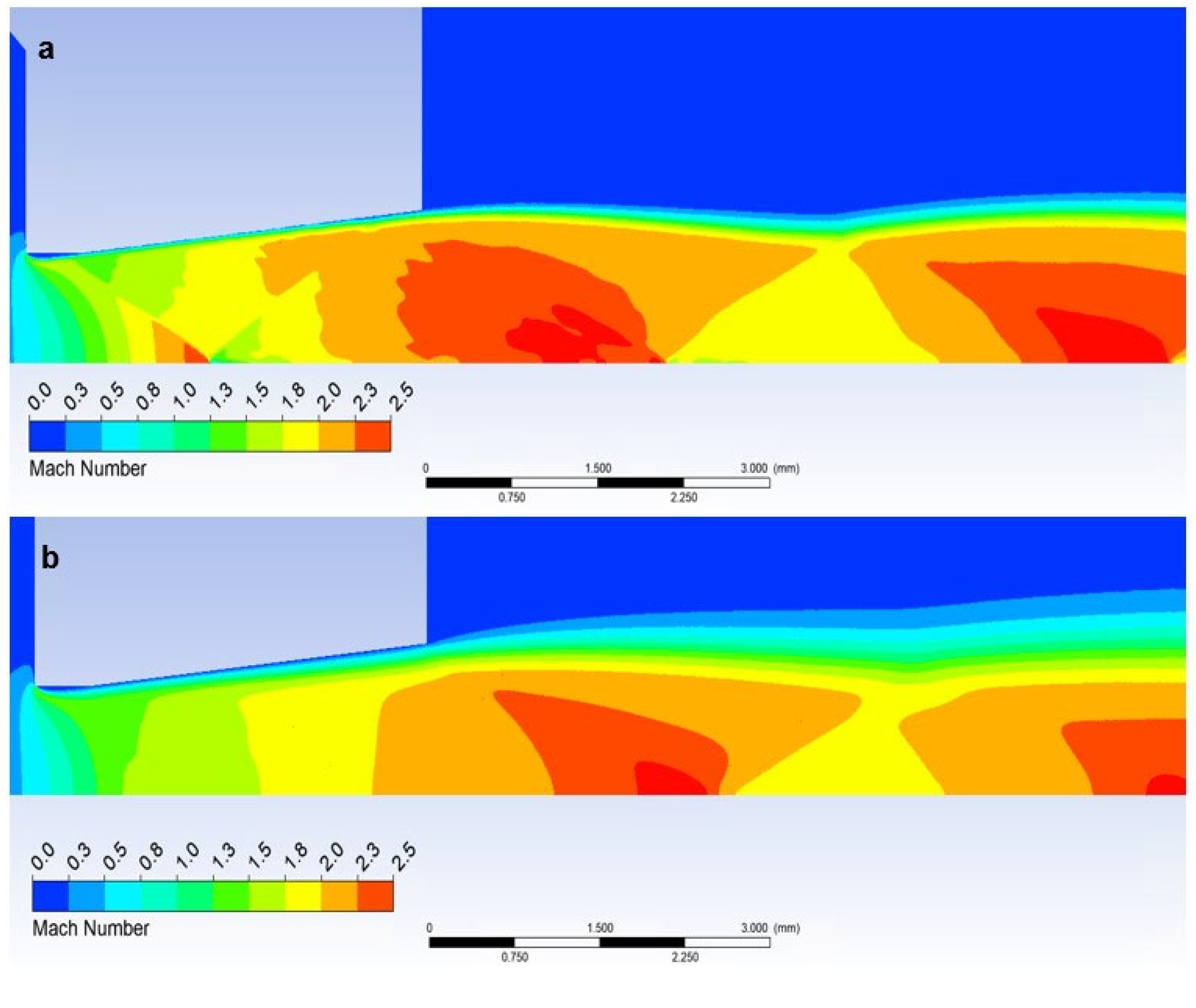
5.1. Evaluation of Flow Velocity
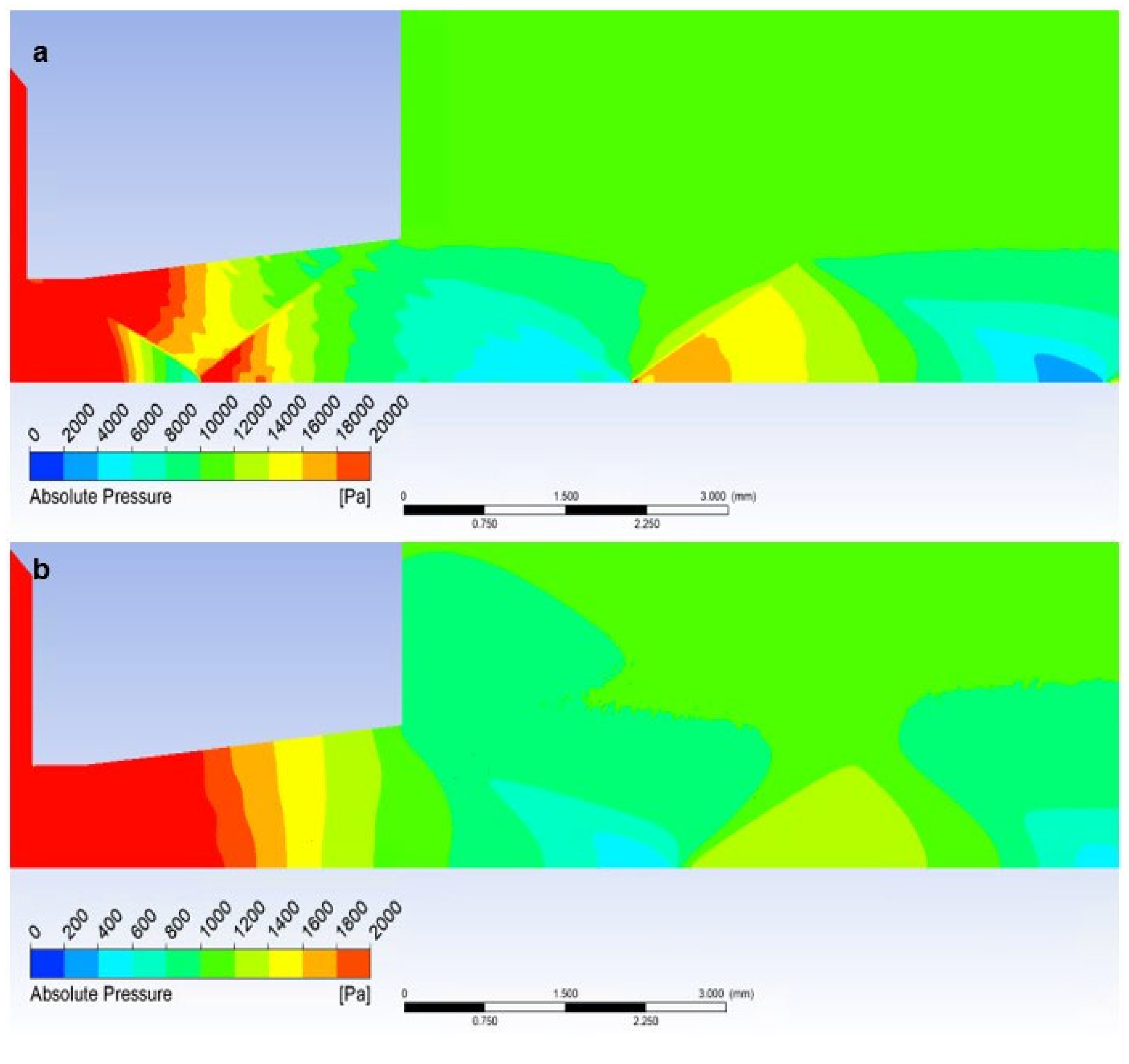
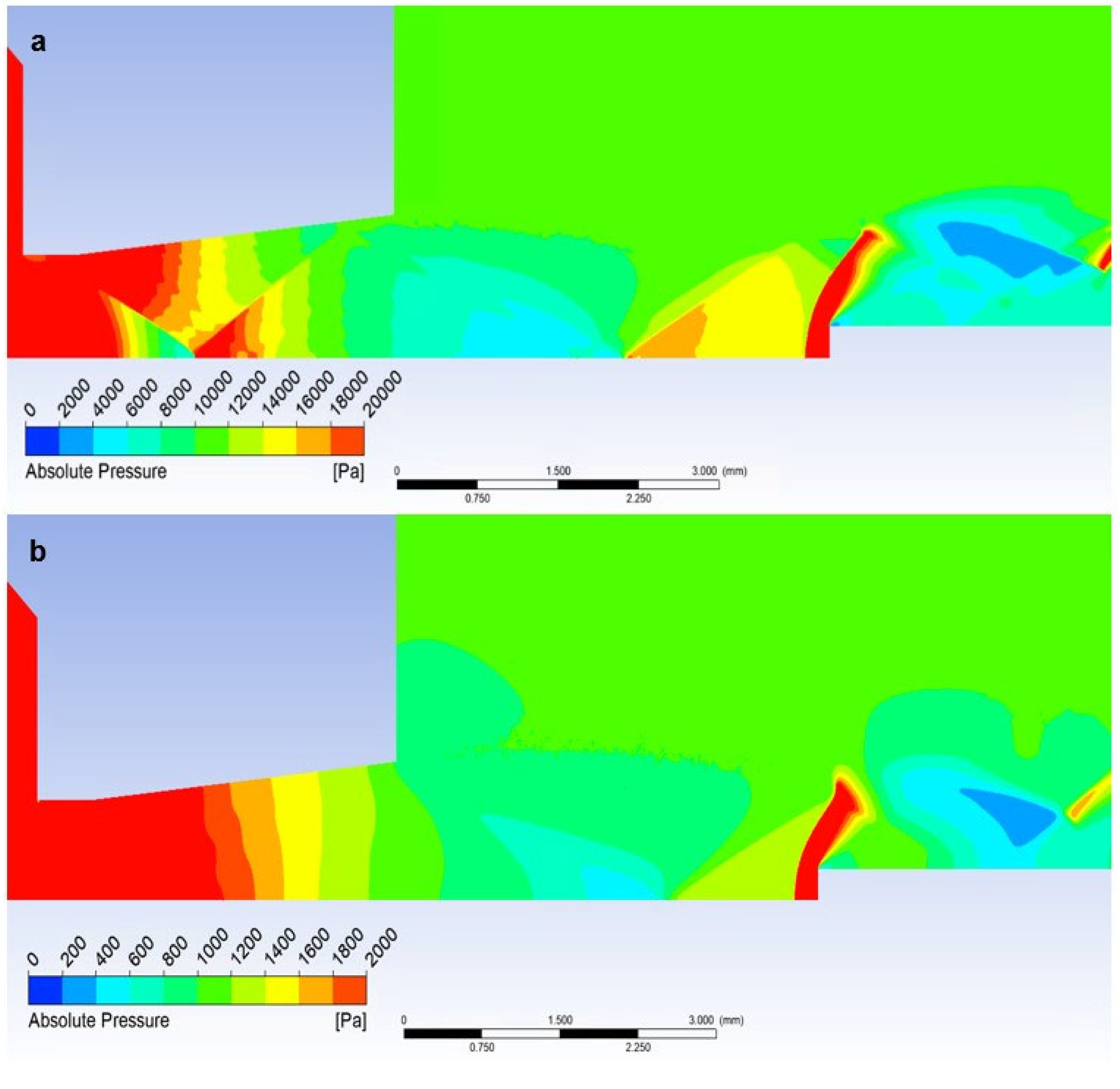
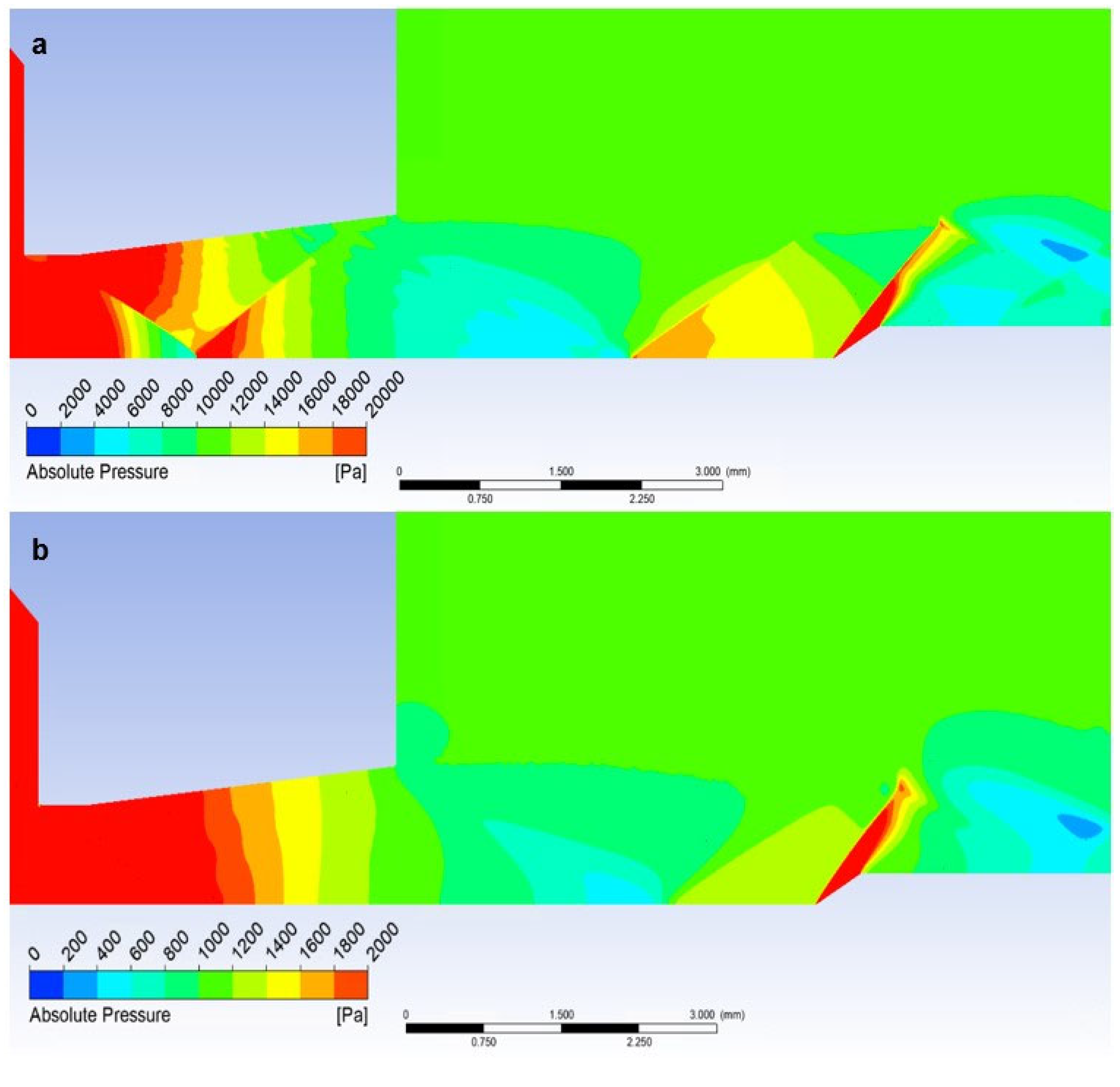
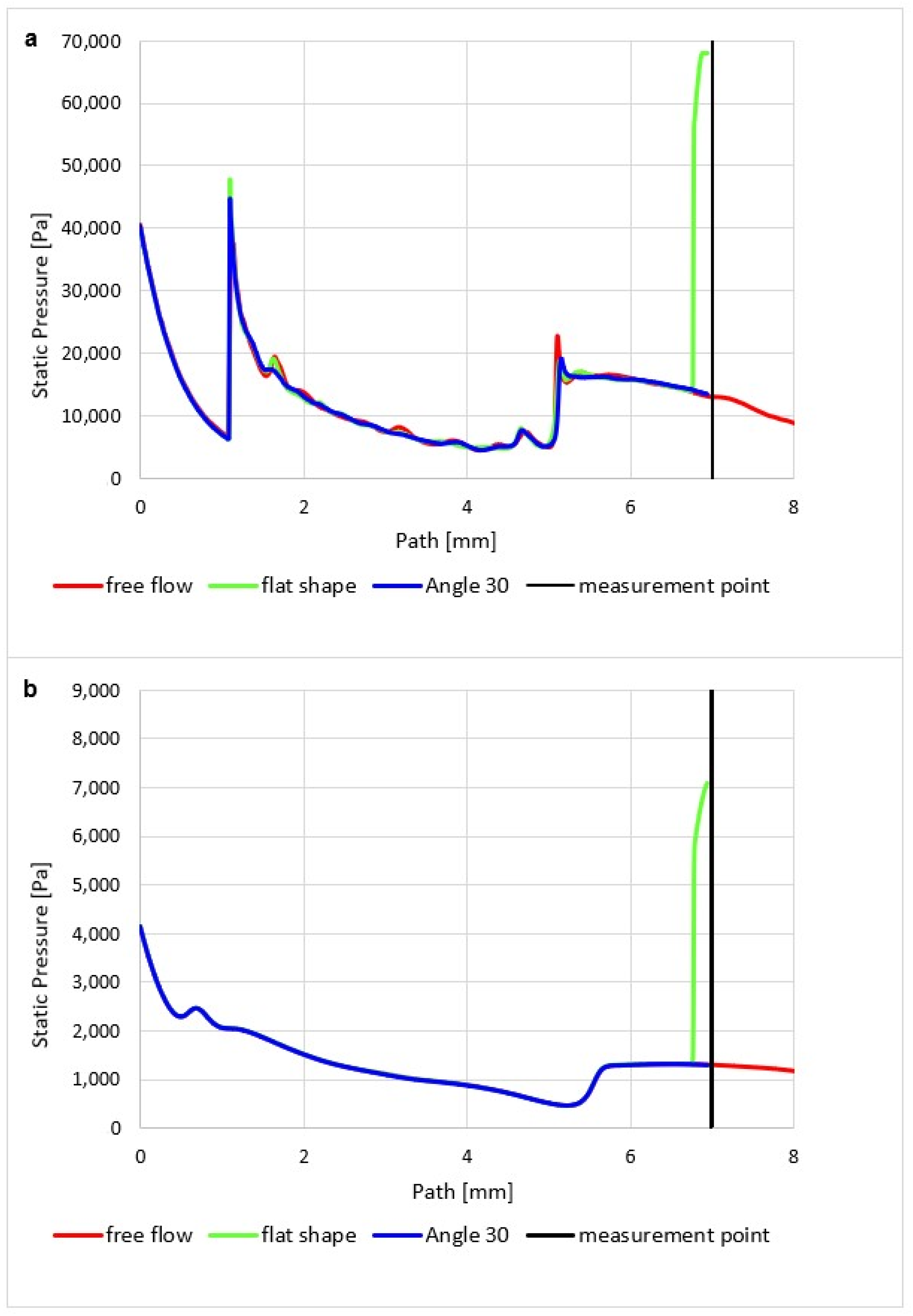
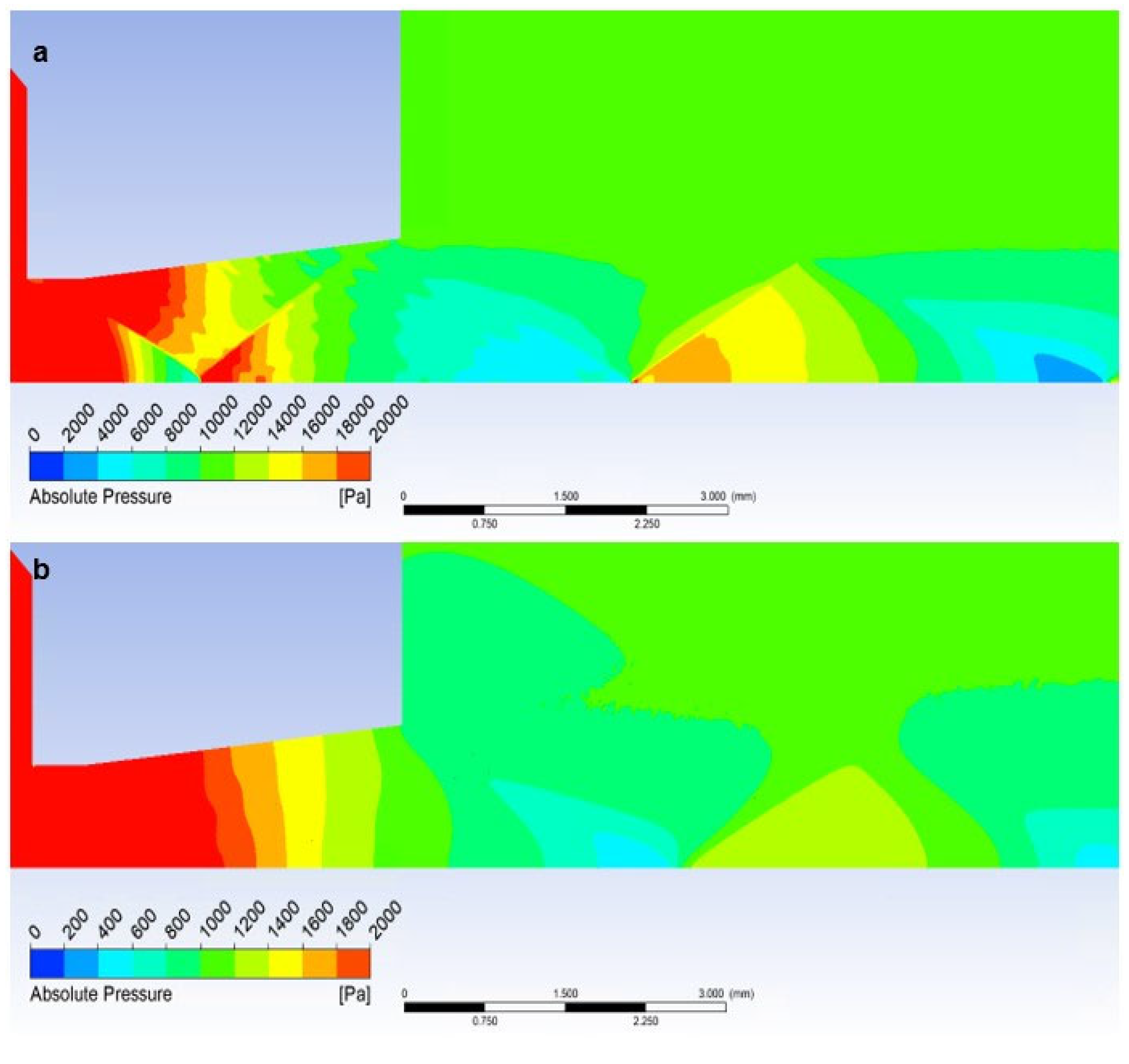
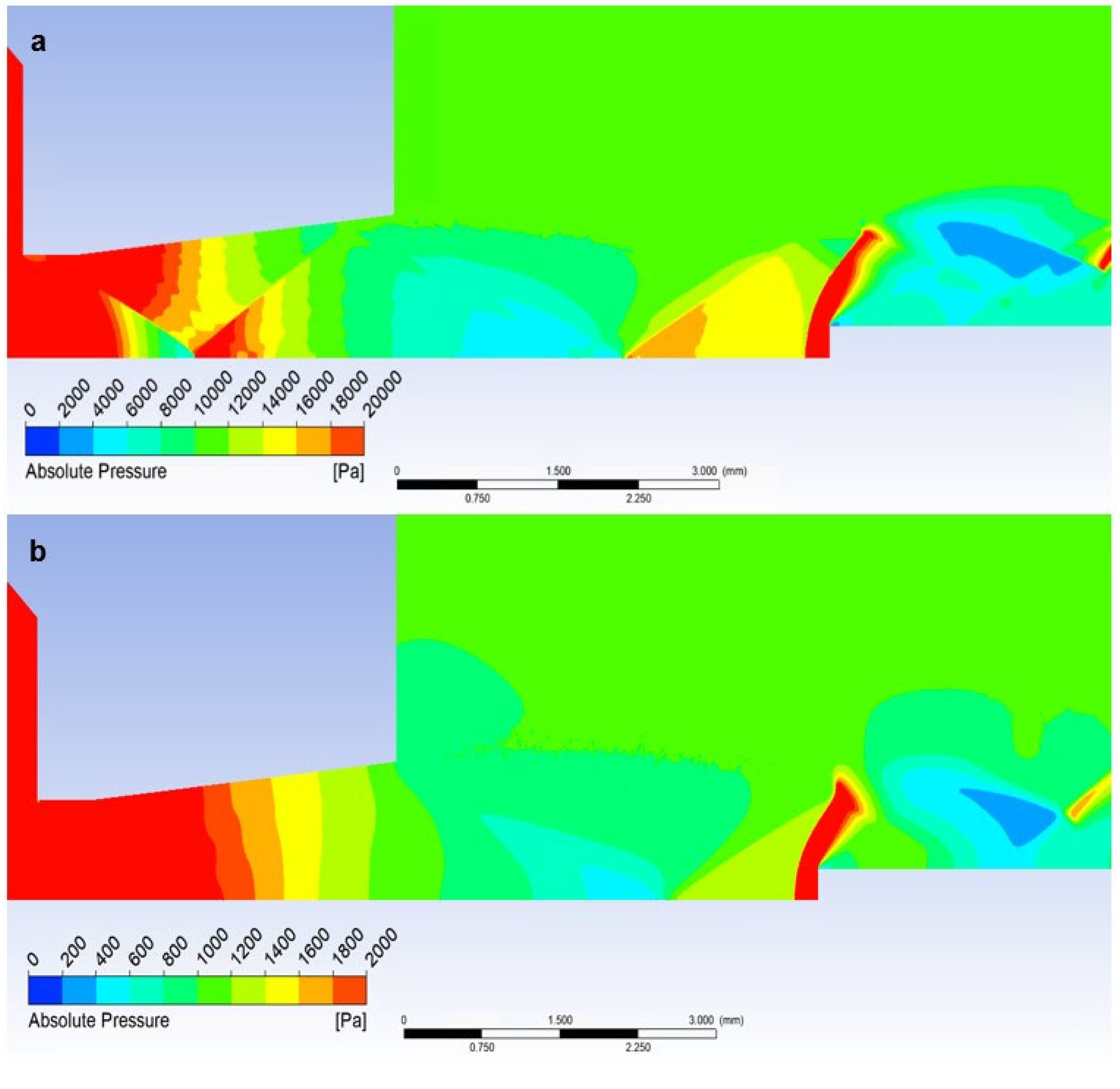
5.2. Evaluation of Static Pressure
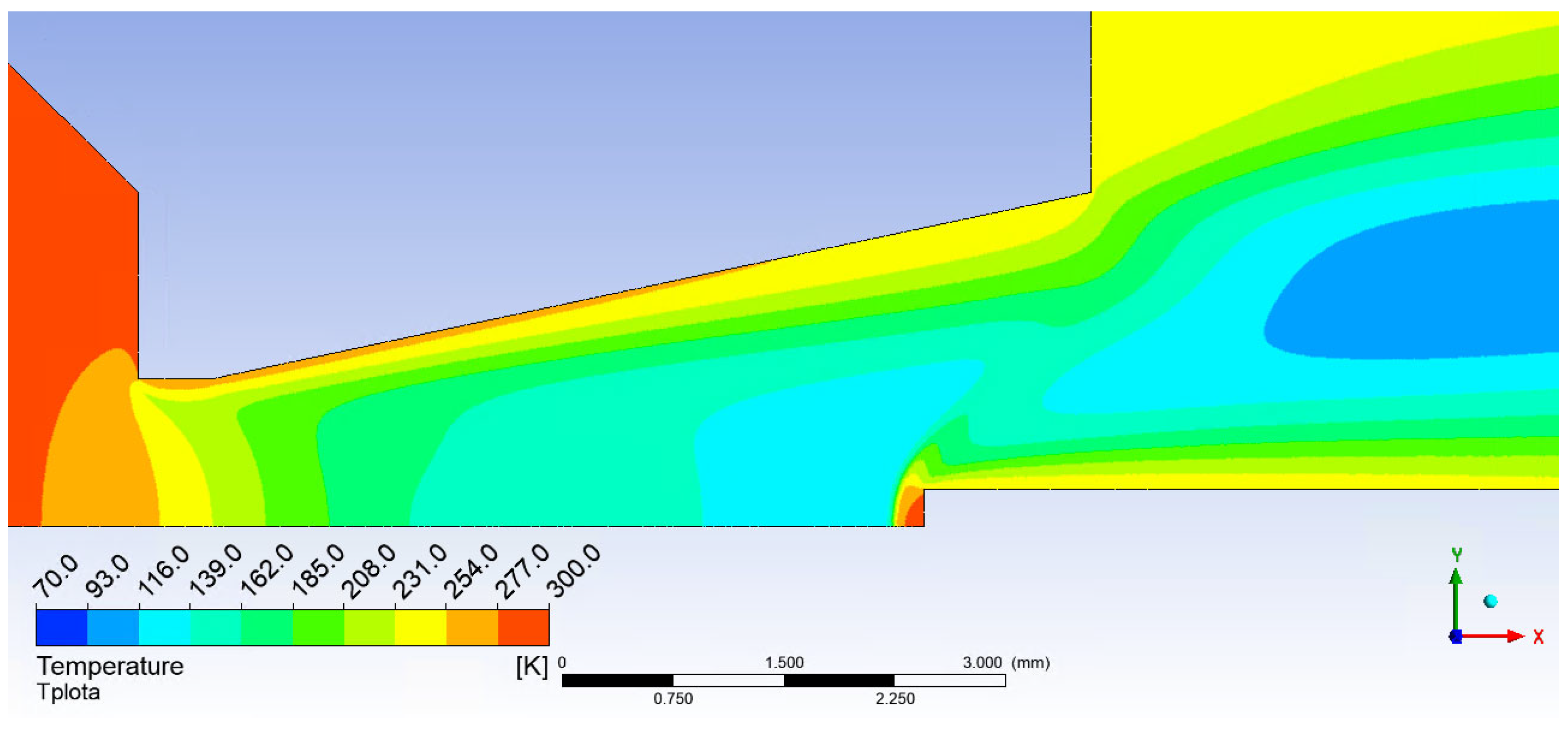
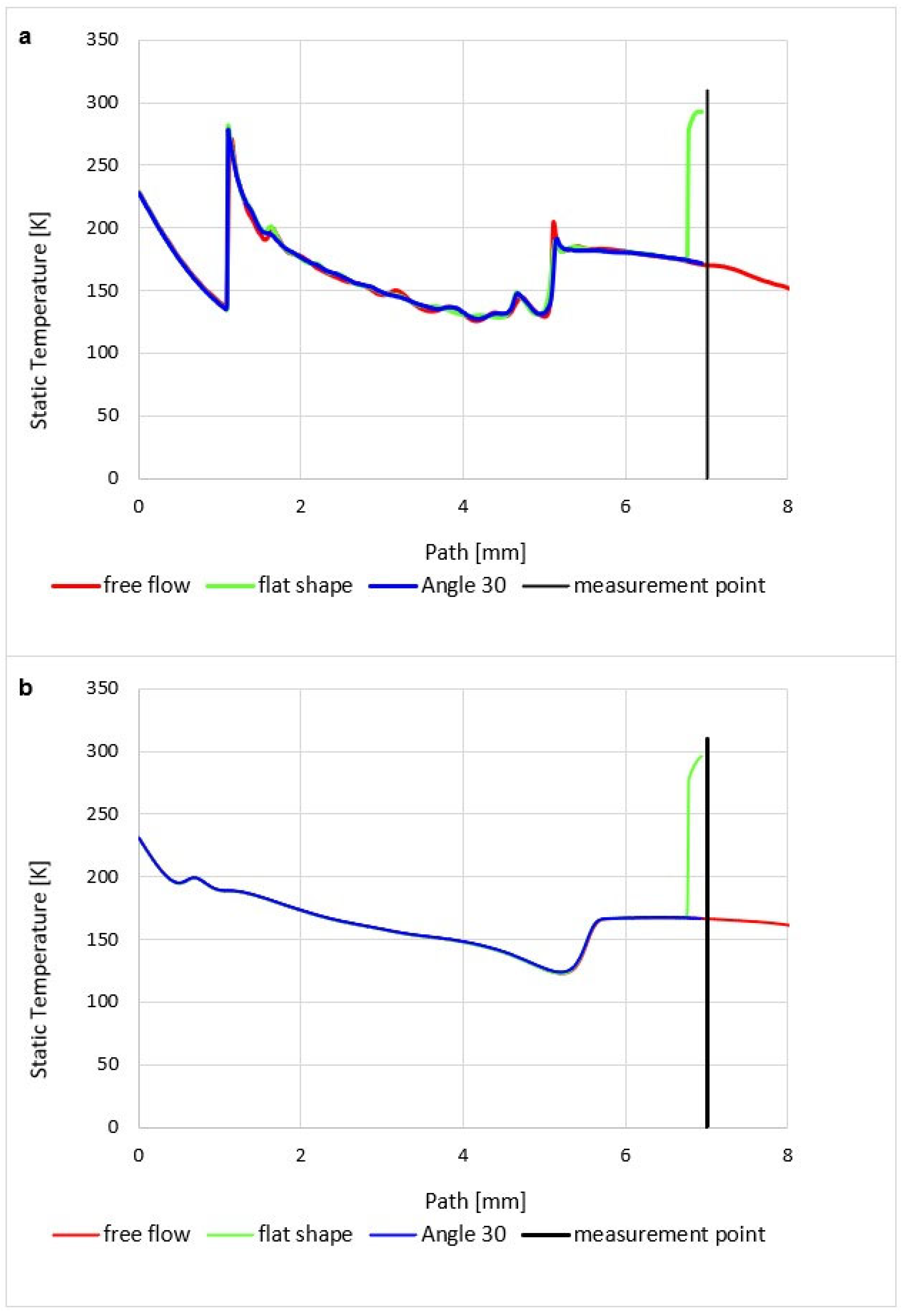
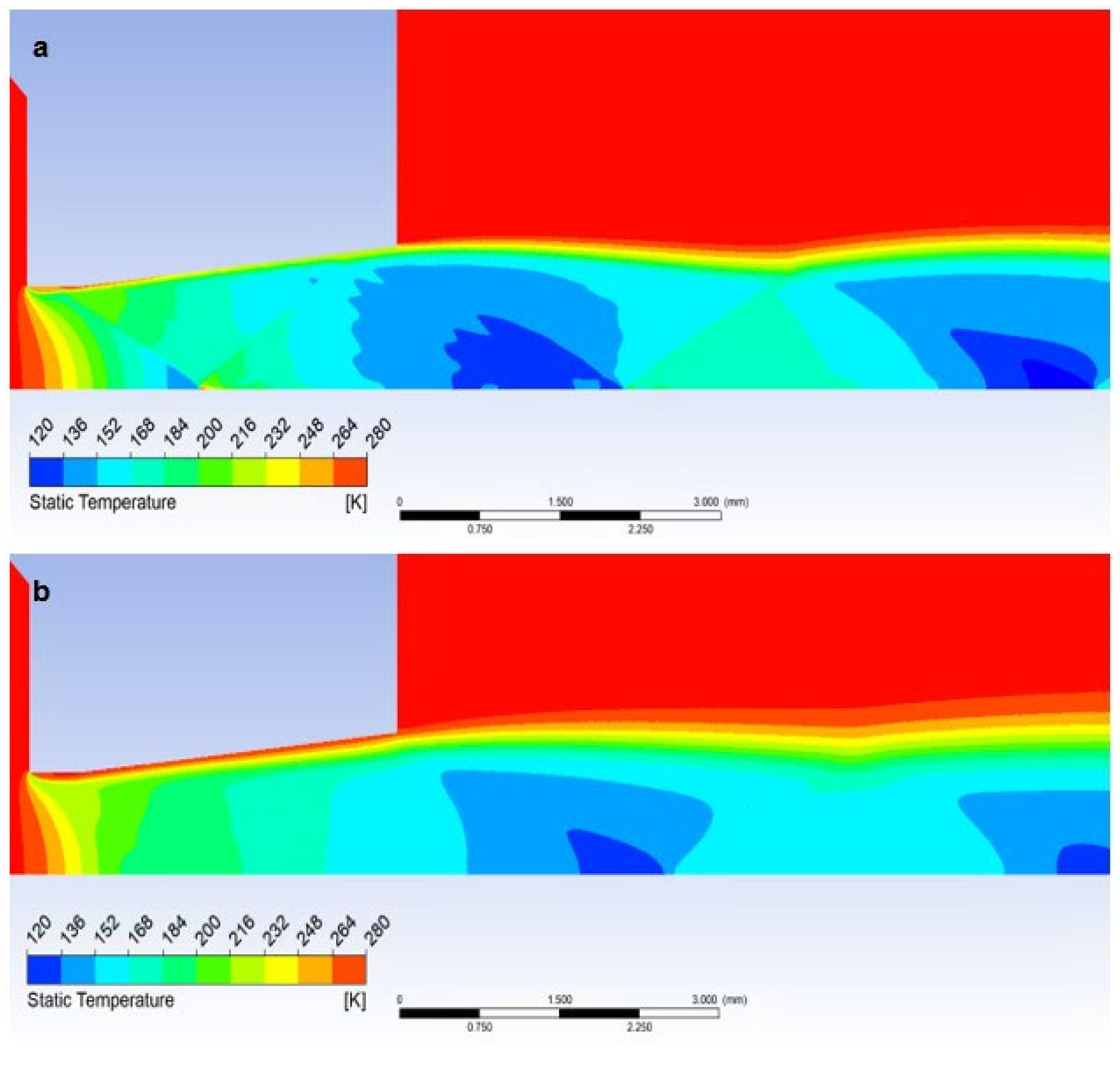
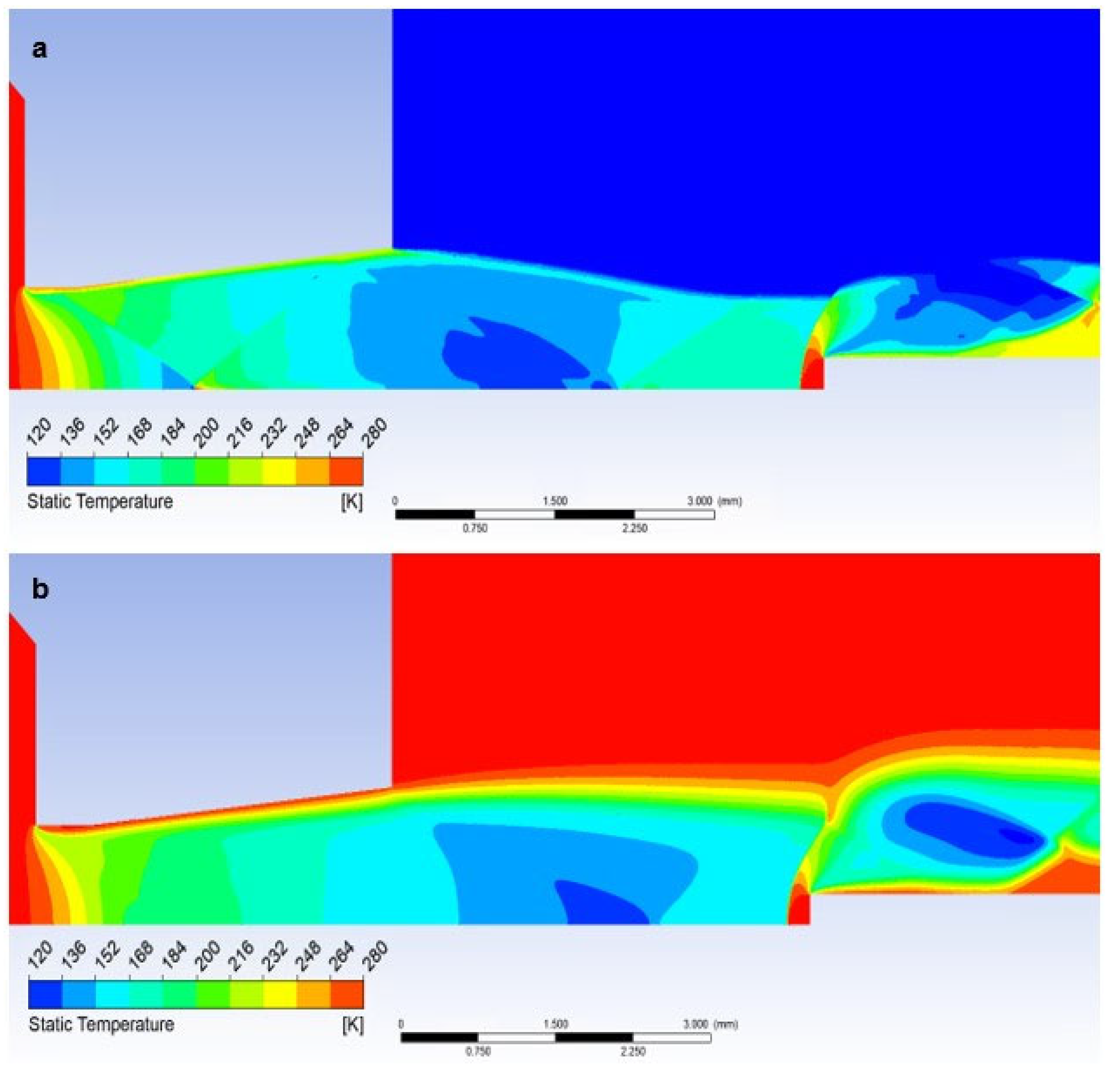
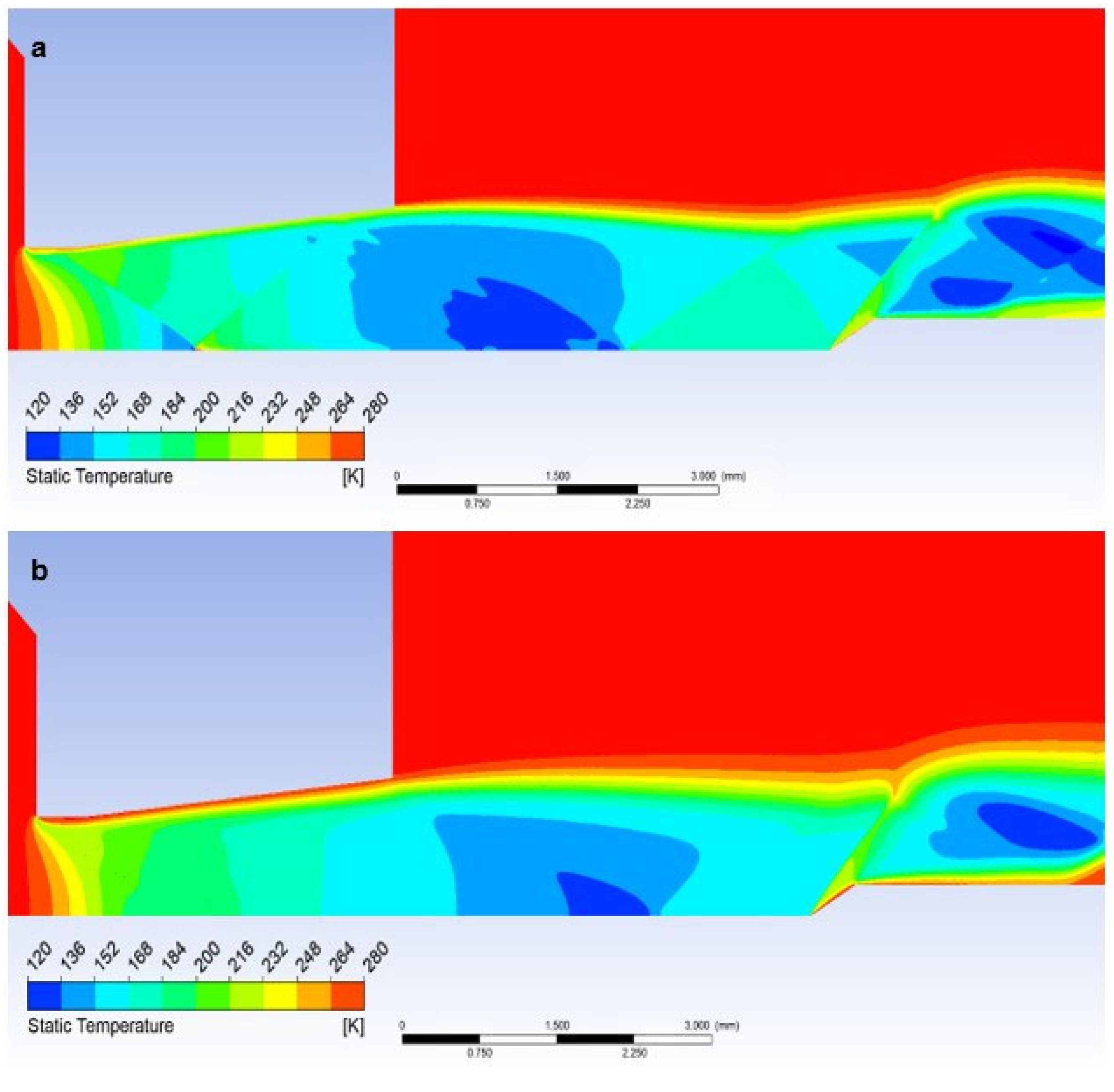
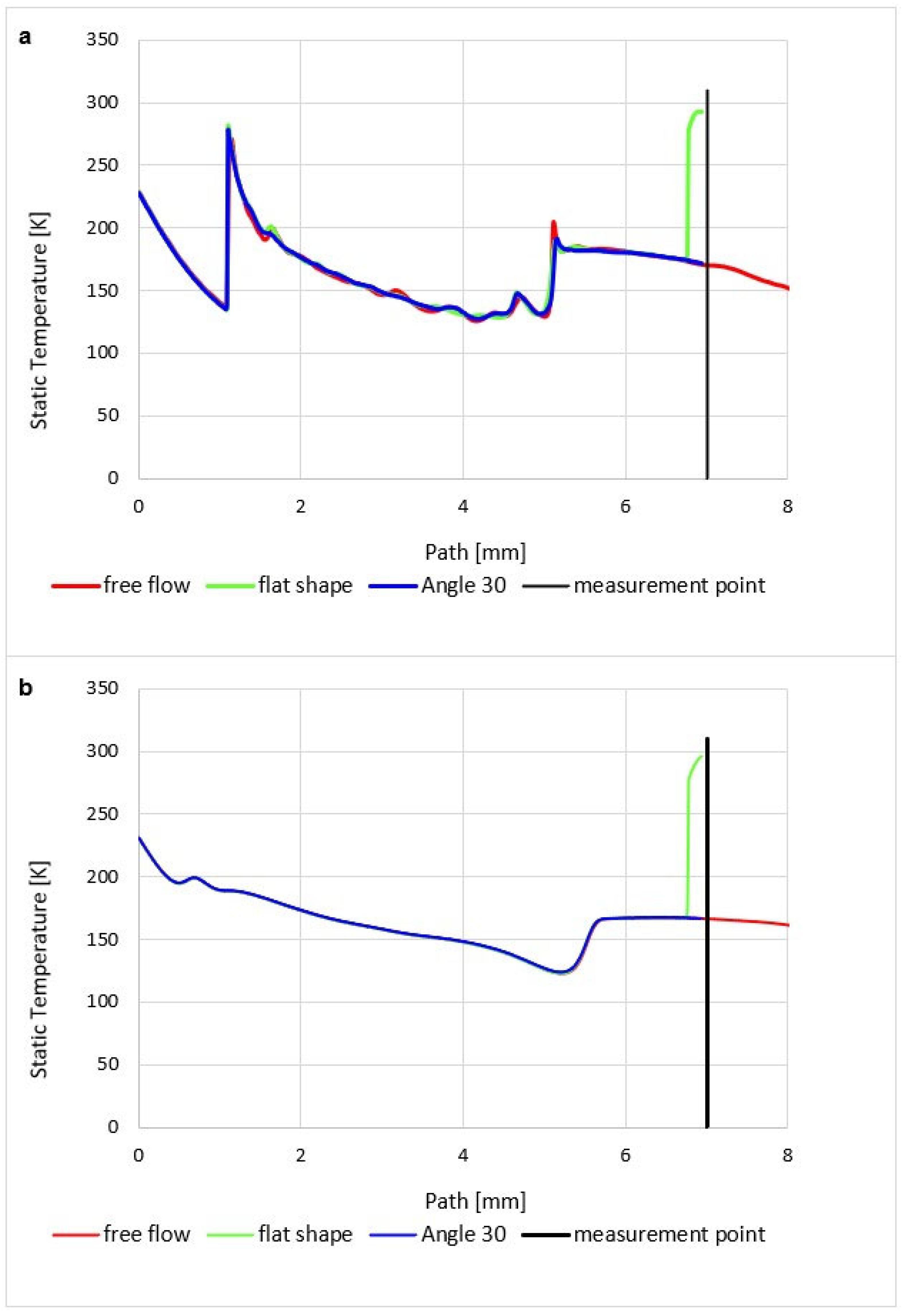
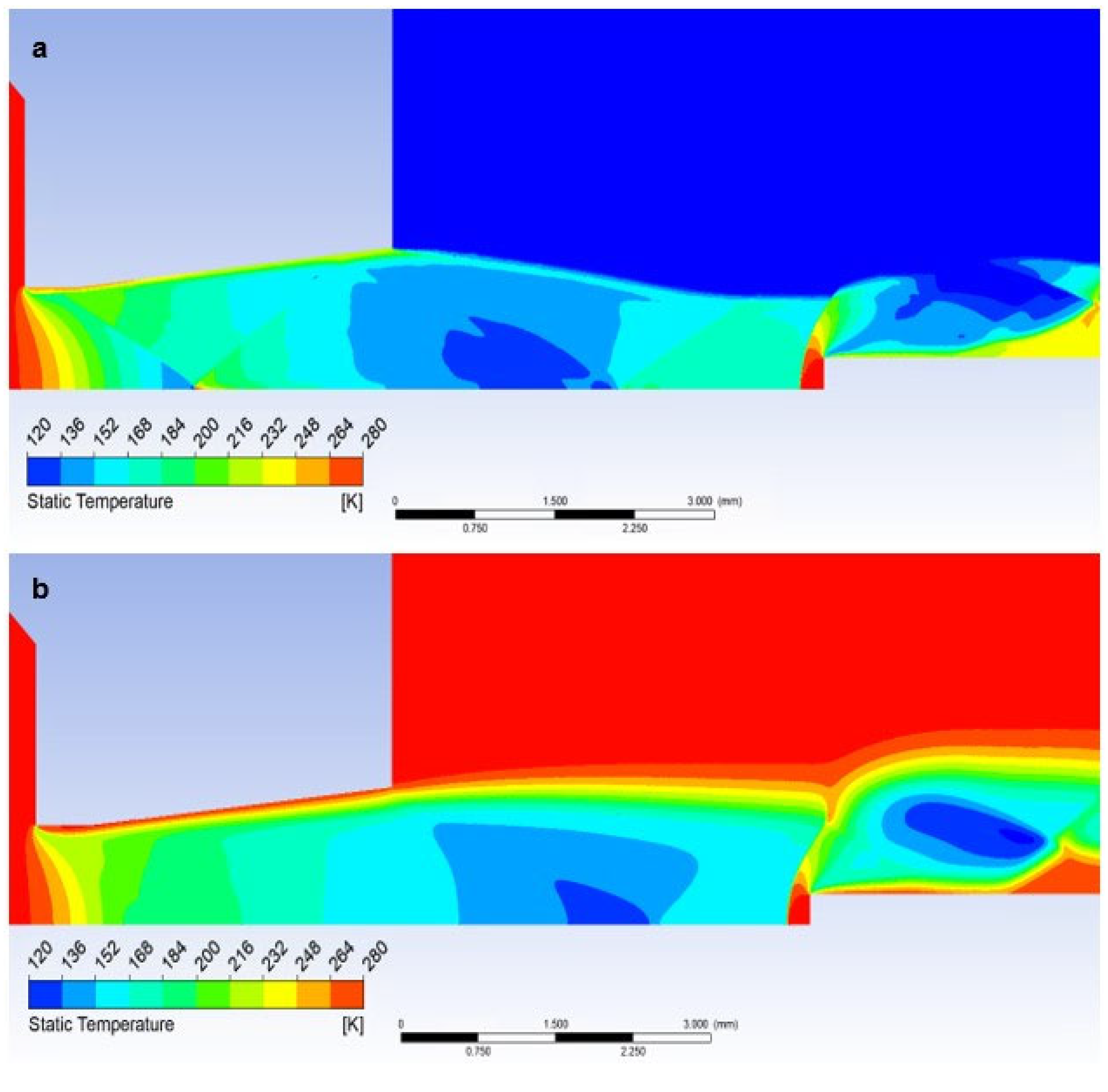
5.3. Evaluation of Static Temperature
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Elaichi, T.; Zebbiche, T. Stagnation temperature effect on the conical shock with application for air. Chin. J. Aeronaut. 2018, 31, 672–697. [Google Scholar] [CrossRef]
- Drexler, P.; Čáp, M.; Fiala, P.; Steinbauer, M.; Kadlec, R.; Kaška, M.; Kočiš, L. A Sensor System for Detecting and Localizing Partial Discharges in Power Transformers with Improved Immunity to Interferences. Sensors 2019, 19, 923. [Google Scholar] [CrossRef] [PubMed]
- Fiala, P.; Sadek, V.; Dohnal, P.; Bachorec, T. Basic experiments with model of inductive flowmeter. Prog. Electromagn. Res. Symp. 2008, 2, 1044–1048. [Google Scholar]
- Chue, S.H. Pressure probes for fluid measurement. Prog. Aerosp. Sci. 1975, 16, 147–223. [Google Scholar] [CrossRef]
- Moran, M.; Shapiro, H. Fundamentals of Engineering Thermodynamics, 3rd ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1996. [Google Scholar]
- Wang, M.; Zeng, L.; Zhao, C.; Sun, S.; Yang, Y. Aerothermoelastic Analysis of Conical Shell in Supersonic Flow. Appl. Sci. 2023, 13, 4850. [Google Scholar] [CrossRef]
- Aabid, A.; Khan, S.A.; Baig, M. A Critical Review of Supersonic Flow Control for High-Speed Applications. Appl. Sci. 2021, 11, 6899. [Google Scholar] [CrossRef]
- Dong, W.; Yao, L.; Luo, W. Numerical Simulation of Flow Field of Submerged Angular Cavitation Nozzle. Appl. Sci. 2023, 13, 613. [Google Scholar] [CrossRef]
- Forster, R.; Kirner, C.; Schein, J. Plasma Expansion Characterization of a Vacuum Arc Thruster with Stereo Imaging. Appl. Sci. 2023, 13, 2788. [Google Scholar] [CrossRef]
- Danilatos, G.D. Velocity and ejector-jet assisted differential pumping: Novel design stages for environmental SEM. Micron 2012, 43, 600–611. [Google Scholar] [CrossRef]
- Maxa, J.; Neděla, V.; Šabacká, P.; Binar, T. Impact of Supersonic Flow in Scintillator Detector Apertures on the Resulting Pumping Effect of the Vacuum Chambers. Sensors 2023, 23, 4861. [Google Scholar] [CrossRef]
- Danilatos, G.D.; Rattenberger, J.; Dracopoulos, V. Beam transfer characteristics of a commercial environmental SEM and a low vacuum SEM. J. Microsc. 2010, 242, 166–180. [Google Scholar] [CrossRef]
- Danilatos, G.D. Figure of merit for environmental SEM and its implications. J. Microsc. 2011, 244, 159–169. [Google Scholar] [CrossRef]
- Danilatos, G.D. Optimum beam transfer in the environmental scanning electron microscope. J. Microsc. 2009, 234, 26–37. [Google Scholar] [CrossRef]
- Dordevic, B.; Neděla, V.; Tihlaříková, E.; Trojan, V.; Havel, L. Effects of copper and arsenic stress on the development of Norway spruce somatic embryos and their visualization with the environmental scanning electron microscope. New Biotechnol. 2019, 48, 35–43. [Google Scholar] [CrossRef]
- Neděla, V.; Konvalina, I.; Lencová, B.; Zlámal, J. Comparison of calculated, simulated and measured signal amplification in variable pressure SEM. Nucl. Instrum. Methods Phys. Res. Sect. A 2011, 645, 79–83. [Google Scholar] [CrossRef]
- Ritscher, A.; Schmetterer, C.; Ipser, H. Pressure dependence of the tin–phosphorus phase diagram. Monatshefte Chem.-Chem. Mon. 2012, 143, 1593–1602. [Google Scholar] [CrossRef]
- Stelate, A.; Tihlaříková, E.; Schwarzerová, K.; Neděla, V.; Petrášek, J. Correlative Light-Environmental Scanning Electron Microscopy of Plasma Membrane Efflux Carriers of Plant Hormone Auxin. Biomolecules 2021, 11, 1407. [Google Scholar] [CrossRef] [PubMed]
- Vlašínová, H.; Neděla, V.; Dordevic, B.; Havel, J. Bottlenecks in bog pine multiplication by somatic embryogenesis and their visualization with the environmental scanning electron microscope. Protoplasma 2017, 254, 1487–1497. [Google Scholar] [CrossRef] [PubMed]
- Schenkmayerová, A.; Bučko, M.; Gemeiner, P.; Treľová, D.; Lacík, I.; Chorvát, D., Jr.; Ačai, P.; Polakovič, M.; Lipták, L.; Rebroš, M.; et al. Physical and Bioengineering Properties of Polyvinyl Alcohol Lens-Shaped Particles Versus Spherical Polyelectrolyte Complex Microcapsules as Immobilisation Matrices for a Whole-Cell Baeyer–Villiger Monooxygenase. Appl. Biochem. Biotechnol. 2014, 174, 1834–1849. [Google Scholar] [CrossRef] [PubMed]
- Krajčovič, T.; Bučko, M.; Vikartovská, A.; Lacík, I.; Uhelská, L.; Chorvát, D.; Neděla, V.; Tihlaříková, E.; Gericke, M.; Heinze, T.; et al. Polyelectrolyte Complex Beads by Novel Two-Step Process for Improved Performance of Viable Whole-Cell Baeyer-Villiger Monoxygenase by Immobilization. Catalysts 2017, 7, 353–364. [Google Scholar] [CrossRef]
- Neděla, V. Methods for Additive Hydration Allowing Observation of Fully Hydrated State of Wet Samples in Environmental SEM. Microsc. Res. Tech. 2007, 70, 95–100. [Google Scholar] [CrossRef]
- Jirák, J.; Neděla, V.; Černoch, P.; Čudek, P.; Runštuk, J. Scintillation SE detector for variable pressure scanning electron microscopes. J. Microsc. 2010, 239, 233–238. [Google Scholar] [CrossRef] [PubMed]
- Šabacká, P.; Maxa, J.; Bayer, R.; Vyroubal, P.; Binar, T. Slip Flow Analysis in an Experimental Chamber Simulating Differential Pumping in an Environmental Scanning Electron Microscope. Sensors 2022, 22, 9033. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Yi, S.; Zhao, Y.; Yang, R.; He, L.; Lu, X. Hypervelocity imperfect gas nozzle design with shared wave-elimination contour. Phys. Fluids 2023, 35, 086113. [Google Scholar] [CrossRef]
- Viskozita Plynů. Available online: https://physics.mff.cuni.cz/kfpp/skripta/kurz_fyziky_pro_DS/display.php/molekul/6_4 (accessed on 11 December 2021).
- Daněk, M. Aerodynamika a Mechanika Letu; VVLŠ SNP: Košice, Slovakia, 1990; p. 83. [Google Scholar]
- Chungil, L.; Yuta, O.; Takayuki, N.; Taku, N. Super-resolution of time-resolved three-dimensional density fields of the B mode in an underexpanded screeching jet. Phys. Fluids 2023, 35, 065128. [Google Scholar] [CrossRef]
- Šabacká, P.; Neděla, V.; Maxa, J.; Bayer, R. Application of Prandtl’s Theory in the Design of an Experimental Chamber for Static Pressure Measurements. Sensors 2021, 21, 6849. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Feng, X.-B. Numerical Modelling of Microchannel Gas Flows in the Transition Flow Regime Using the Cascaded Lattice Boltzmann Method. Entropy 2020, 22, 41. [Google Scholar] [CrossRef]
- Wang, G.; Chen, L.; Guan, B.; Zhang, Y.; Zhu, L. Numerical investigation on thrust characteristics of an annular expansion–deflection nozzle. Phys. Fluids 2023, 35, 056119. [Google Scholar] [CrossRef]
- Xue, Z.; Zhou, L.; Liu, D. Accurate Numerical Modeling for 1D Open-Channel Flow with Varying Topography. Water 2023, 15, 2893. [Google Scholar] [CrossRef]
- Thevenin, D.; Janiga, D. Optimization and Computational Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Baehr, H. Thermodynamik, 14th ed.; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Ansys Fluent Theory Guide. Available online: www.ansys.com (accessed on 21 October 2022).
- Chorin, A.J. Numerical solution of navier-stokes equations. Math. Comput. 1968, 22, 745–762. [Google Scholar] [CrossRef]
- Liou, M.S. A sequel to AUSM: AUSM+. J. Comput. Phys. 1996, 129, 364–382. [Google Scholar] [CrossRef]
- Barth, T.; Jespersen, D. The design and application of upwind schemes on unstructured meshes. In Proceedings of the 27th Aerospace Sciences Meeting, Reno, NV, USA, 9–12 January 1989. [Google Scholar]
- Maxa, J.; Hlavatá, P.; Vyroubal, P. Using the Ideal and Real Gas Model for the Mathematical—Physics Analysis of the Experimental Chambre. ECS Trans. 2018, 87, 377–387. [Google Scholar] [CrossRef]
- Gennari, S.; Maglia, F.; Anselmi-Tamburini, U.; Spinolo, G. SHS of NbSi2: A Comparison Between Experiments and Simulations. Monatsh. Chem. 2005, 136, 1871–1875. [Google Scholar] [CrossRef]
- Xiao, L.; Hao, X.; Lei, D.; Tiezhi, S. Flow structure and parameter evaluation of conical convergent–divergent nozzle supersonic jet flows. Phys. Fluids 2023, 35, 066109. [Google Scholar]
- Mali, A.K.; Jana, T.; Kaushik, M.; Mishra, D.P. Influences of semi-circular, square, and triangular grooves on mixing behavior of an axisymmetric supersonic jet. Phys. Fluids 2023, 35, 046108. [Google Scholar] [CrossRef]
- Karnam, A.; Saleem, M.; Gutmark, E. Influence of nozzle geometry on screech instability closure. Phys. Fluids 2023, 35, 086119. [Google Scholar] [CrossRef]
- Wang, G.; Zhou, B.; Guan, B.; Yang, H. Numerical investigation on expansion–deflection nozzle flow during an ascending–descending trajectory. Phys. Fluids 2023, 35, 086111. [Google Scholar] [CrossRef]
- Rathakrishnan, E. Corrugation geometry effect on jet mixing. Phys. Fluids 2023, 35, 056102. [Google Scholar] [CrossRef]
- Salga, J.; Hoření, B. Tabulky Proudění Plynu; UNOB: Brno, Czech Republic, 1997. [Google Scholar]
- Yadav, M.; Yadav, R.S.; Wang, C. Lattice Boltzmann simulations of flow inside a converging and diverging nozzle with the insertion of single and multiple circular cylinders. Phys. Fluids 2023, 35, 084110. [Google Scholar] [CrossRef]
- Dejč, M.J. Technická Dynamika Plynů; SNTL: Praha, Czech Republic, 1967. [Google Scholar]
- Available online: https://www.efunda.com/designstandards/sensors/pitot_tubes/pitot_tubes_theory.cfm (accessed on 12 December 2002).
- Uruba, V. Metody Analýzy Signálů Při Studio Nestacionárních Jevů v Proudících Tekutinách; ČVUT: Praha, Czech Republic, 2006; p. 58. [Google Scholar]
- Maxová, A.; Maxa, J.; Šabacká, P. The impact of pumping velocity on temperature running in chambers of experimental system. ECS Trans. 2020, 99, 317–323. [Google Scholar] [CrossRef]
- Breyer, D.W.; Pankhurst, R.C. Pressure-Probe Methods for Determining Windd Speed and Flow Direction; National Physical Laboratory, Her Majesty´s Stationery Office: London, UK, 1971. [Google Scholar]
- Available online: https://www.grc.nasa.gov/www/k-12/airplane/wdgflow.html (accessed on 11 December 2021).
- Maxa, J.; Hlavatá, P.; Vyroubal, P. Analysis of impact of conic aperture in differentially pumped chamber. Adv. Millitary Technol. 2019, 14, 151–161. [Google Scholar] [CrossRef]
- Hlavatá, P.; Maxa, J.; Vyroubal, P. Analysis of pitot tube static probe angle in the experimental chamber conditions. ESC Trans. 2018, 87, 369–375. [Google Scholar] [CrossRef]
- Škorpík, J. Proudění Plynů a Par Tryskami, Transformační Technologie; Pokračující Zdroj: Brno, Czech Republic, 2006; ISSN 1804-8293. [Google Scholar]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Šabacká, P.; Maxa, J.; Bayer, R.; Binar, T.; Bača, P.; Dostalová, P.; Mačák, M.; Čudek, P. Comparative Analysis of Supersonic Flow in Atmospheric and Low Pressure in the Region of Shock Waves Creation for Electron Microscopy. Sensors 2023, 23, 9765. https://doi.org/10.3390/s23249765
Šabacká P, Maxa J, Bayer R, Binar T, Bača P, Dostalová P, Mačák M, Čudek P. Comparative Analysis of Supersonic Flow in Atmospheric and Low Pressure in the Region of Shock Waves Creation for Electron Microscopy. Sensors. 2023; 23(24):9765. https://doi.org/10.3390/s23249765
Chicago/Turabian StyleŠabacká, Pavla, Jiří Maxa, Robert Bayer, Tomáš Binar, Petr Bača, Petra Dostalová, Martin Mačák, and Pavel Čudek. 2023. "Comparative Analysis of Supersonic Flow in Atmospheric and Low Pressure in the Region of Shock Waves Creation for Electron Microscopy" Sensors 23, no. 24: 9765. https://doi.org/10.3390/s23249765
APA StyleŠabacká, P., Maxa, J., Bayer, R., Binar, T., Bača, P., Dostalová, P., Mačák, M., & Čudek, P. (2023). Comparative Analysis of Supersonic Flow in Atmospheric and Low Pressure in the Region of Shock Waves Creation for Electron Microscopy. Sensors, 23(24), 9765. https://doi.org/10.3390/s23249765