
Single-Frequency GNSS Integer Ambiguity Solving Based on Adaptive Genetic Particle Swarm Optimization Algorithm




Abstract
:1. Introduction
2. GNSS Differential Positioning Model Analysis
2.1. Mathematical Model of Carrier Phase Double Difference
2.2. Least Squares Estimation of Ambiguity Float Solutions
2.3. Ambiguity Decorrelation
3. Genetic Particle Swarm Optimization Algorithm Ambiguity Search
3.1. Classical Particle Swarm Optimization Algorithm
3.2. Classical Genetic Algorithm
3.3. Genetic Particle Swarm Optimization Algorithm
3.3.1. Genetic Selection Cross-Mutation Operation
- (1)
- The selection operation is responsible for identifying the dominant individuals within the current population. In this study, we adopt a meritocratic approach combined with half selection to identify the superior individuals in the population. Firstly, we calculate and rank their fitness levels, where higher fitness corresponds to higher ranking and increased probability of selection;
- (2)
- Crossover operations are responsible for generating novel individuals, achieved by exchanging segments of their chromosomes to produce two offspring chromosomes. The position of crossover is determined randomly, increasing the likelihood of escaping local optima. In this study, the crossover was randomly performed on two selected individuals at two specific crossover points to create new individuals by combining information from the parent’s mating population;
- (3)
- The mutation operation is responsible for facilitating the algorithm to escape from local optima, and a smaller value is generally chosen as the mutation probability. A higher mutation probability may lead to the destruction of optimal solutions. After conducting numerous experiments, a mutation probability of 0.1 was adopted in this paper.
3.3.2. AGPSO Adaptation Function Establishment
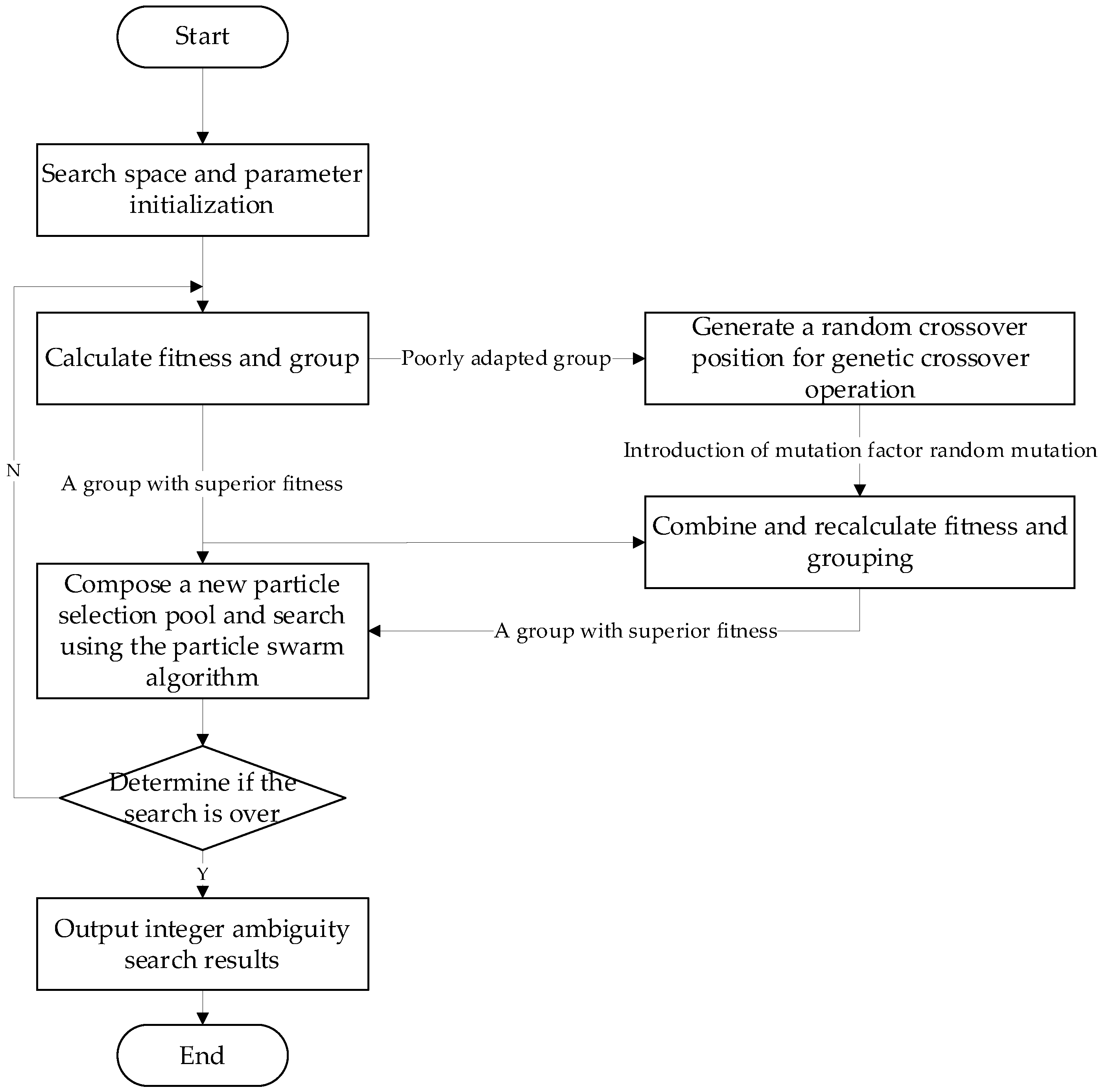
3.3.3. Basic Flow of AGPSO
- (1)
- Initialize the velocity and position of the particles, the maximum and minimum values of the weights, the acceleration constant, the population size, the Mutation factor, the maximum number of iterations, and the minimum error for the termination of the algorithm;
- (2)
- The initial adaptation value of each particle is calculated, the population is divided into two groups with good and poor adaptation, and the group with good adaptation is selected to enter the next generation;
- (3)
- A random crossover position is generated, and a crossover operation is performed on the poorly adapted set;
- (4)
- Introducing a mutation factor that randomly mutates the poorly adapted group when the random number is smaller than the mutation factor;
- (5)
- After the group with poor fitness undergoes the cross-mutation operation, the particle fitness is recalculated, combined with the group with good fitness initially, and reclassified into two groups of good and poor fitness. The re-grouped group with good fitness and the initial group with good fitness are taken to form a new particle selection pool;
- (6)
- Use the best-adapted value in the new particle pool as the global best optimum, and use the position corresponding to this adapted value as the global optimum position of the particle;
- (7)
- Update the particle velocity by the previous formula and limit the flight speed so that it cannot exceed the maximum flight speed;
- (8)
- Update the particle position by the previous formula and compare whether the adapted value of each particle is better than the historical optimal value; if yes, then replace it;
- (9)
- Calculate whether the adapted value of the particle’s global optimum is better than the historical optimum, and if so, replace it;
- (10)
- Repeat 2–9 until the set minimum error is met or the maximum number of iterations is reached;
- (11)
- Output the global optimal value of the optimal particle and its corresponding position as well as the local optimal value and corresponding position of each particle.
4. Numerical and Experimental Analysis
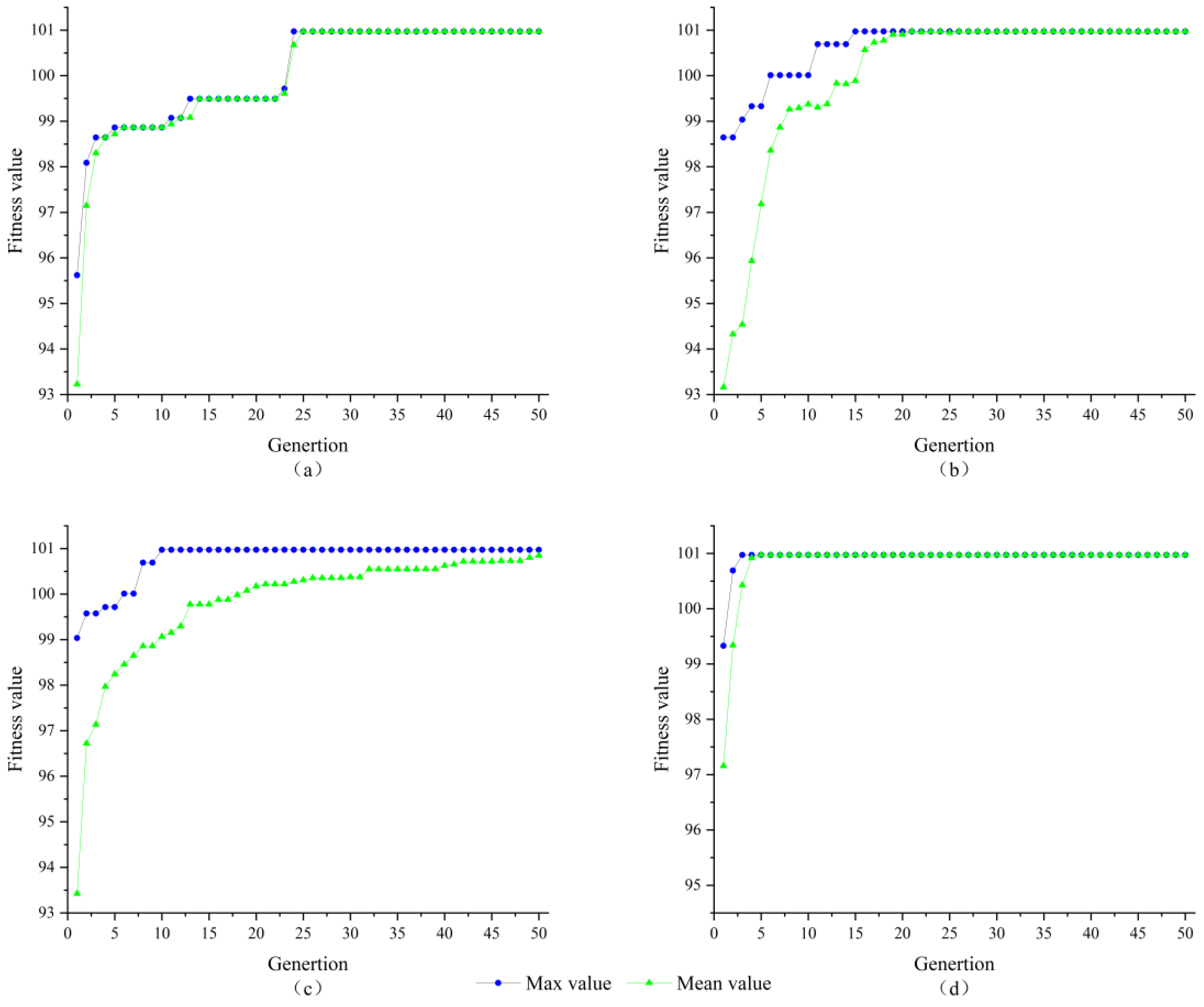
4.1. Numerical Analysis
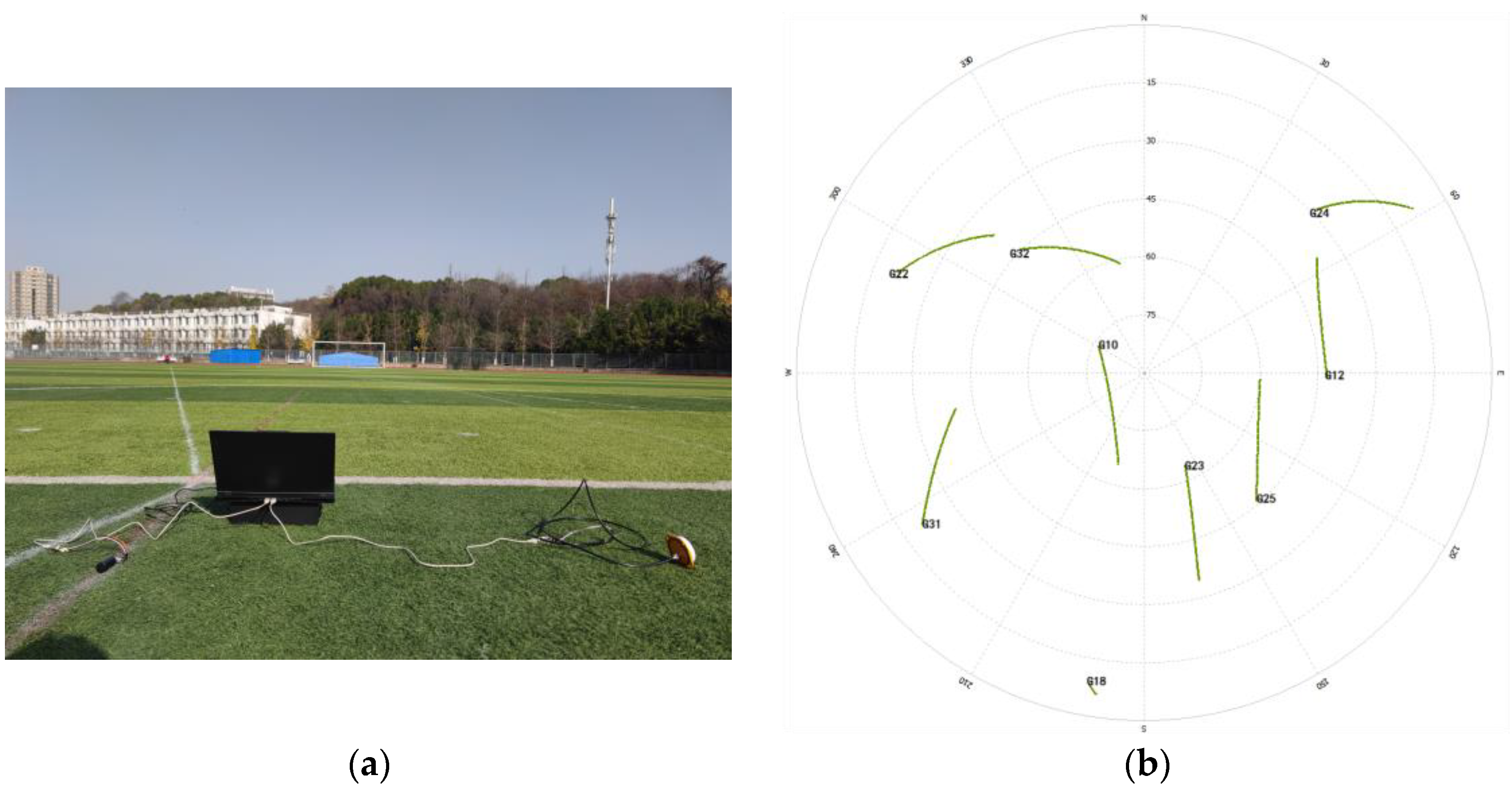
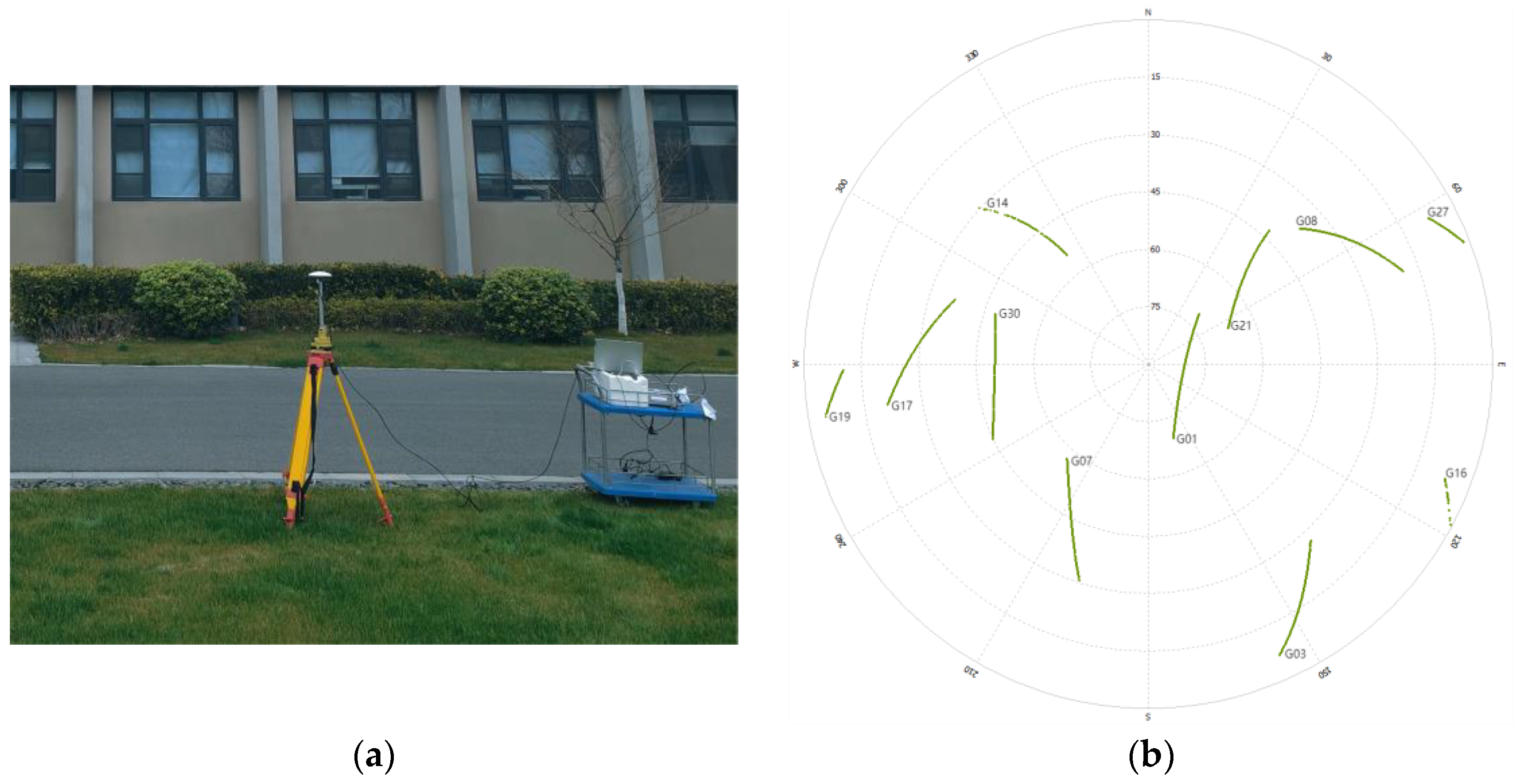
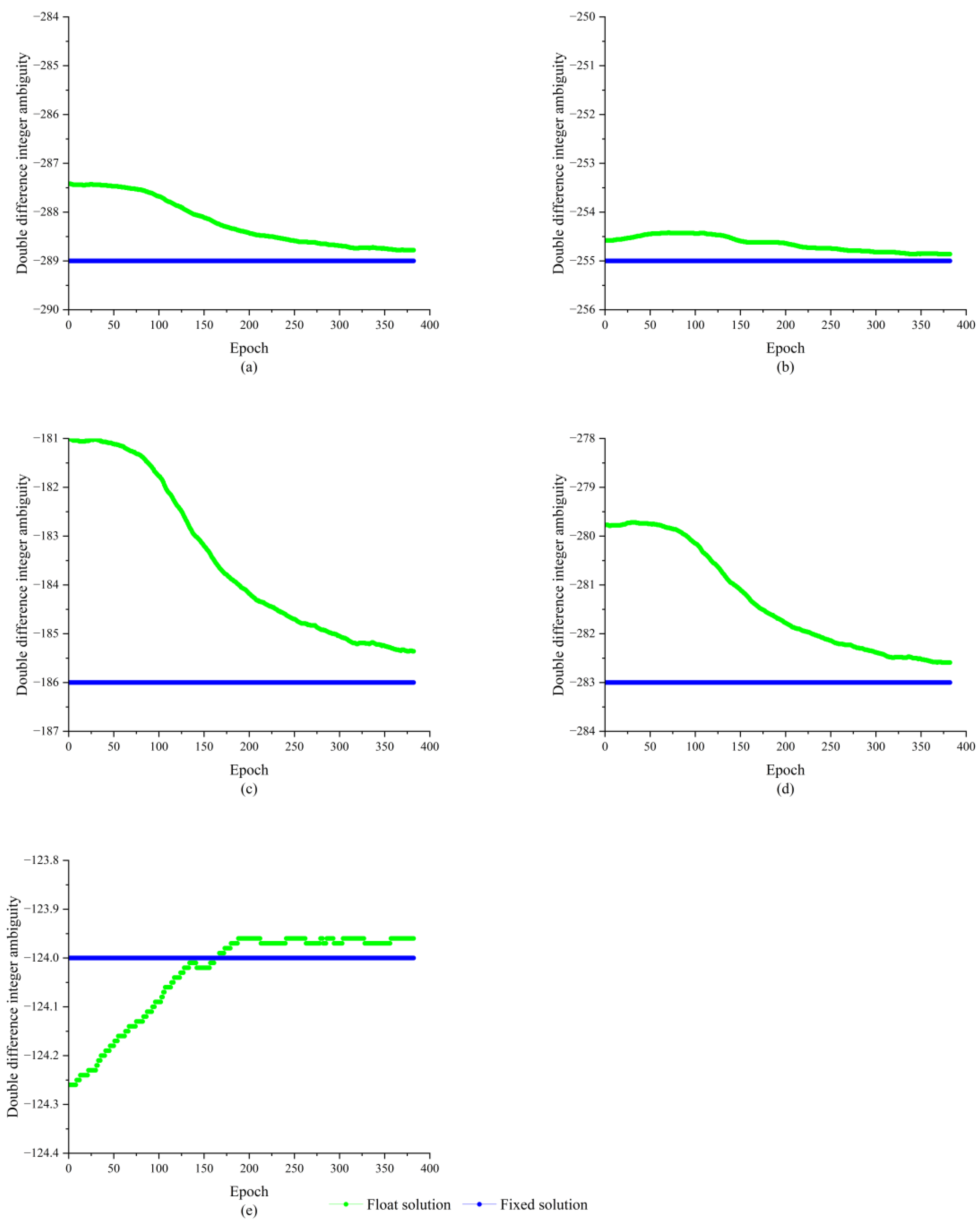
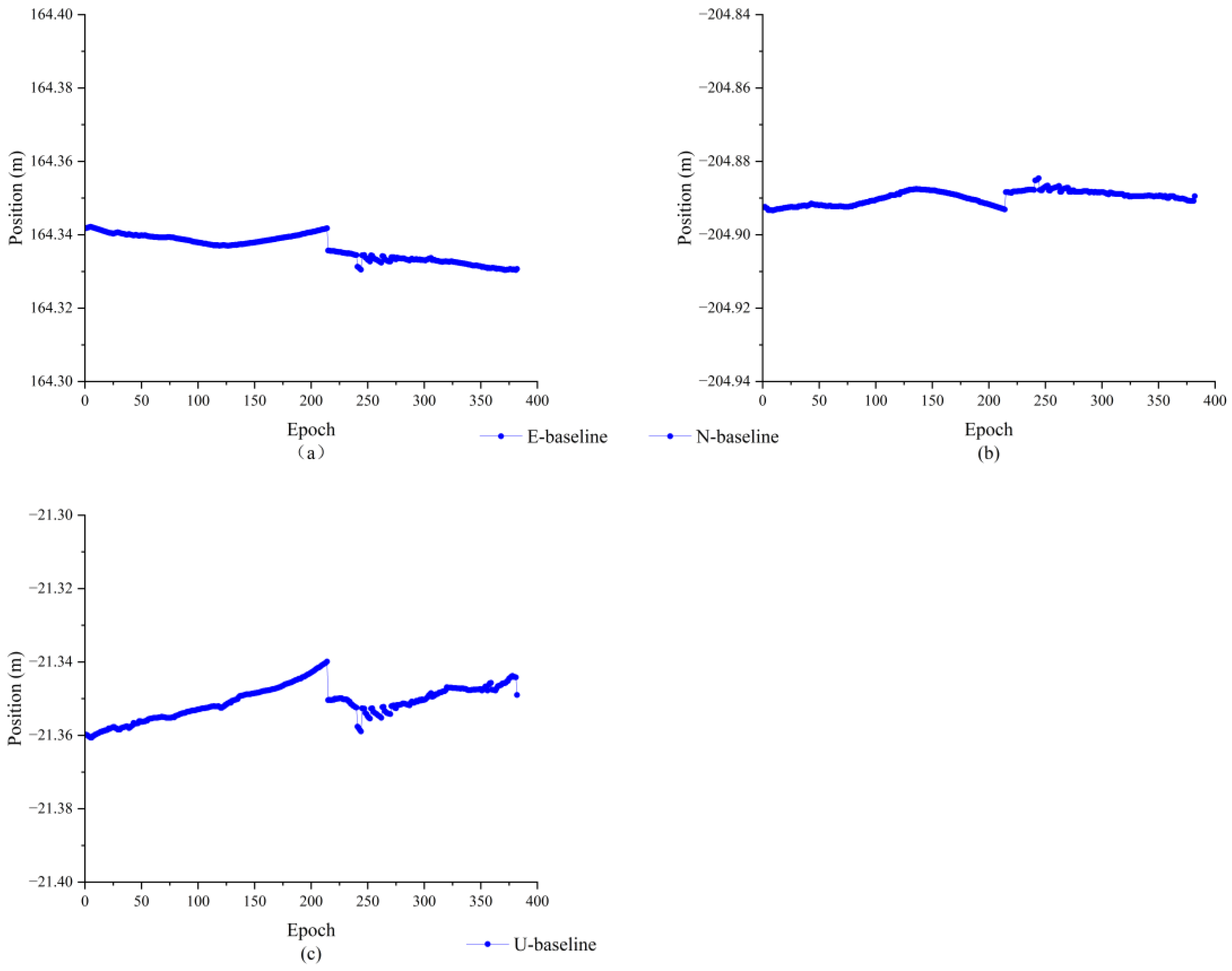
4.2. Test Analysis
5. Conclusions
- (1)
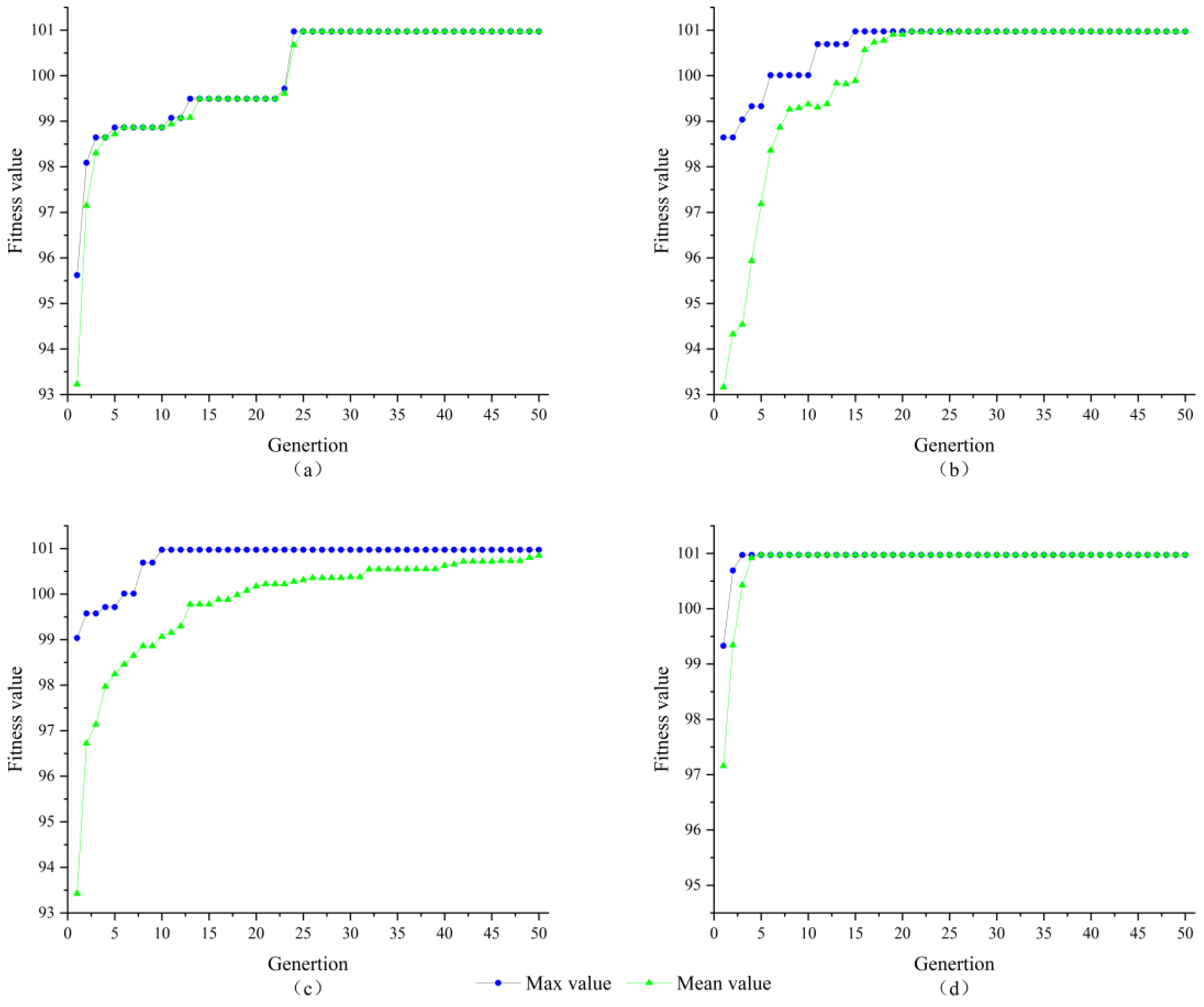
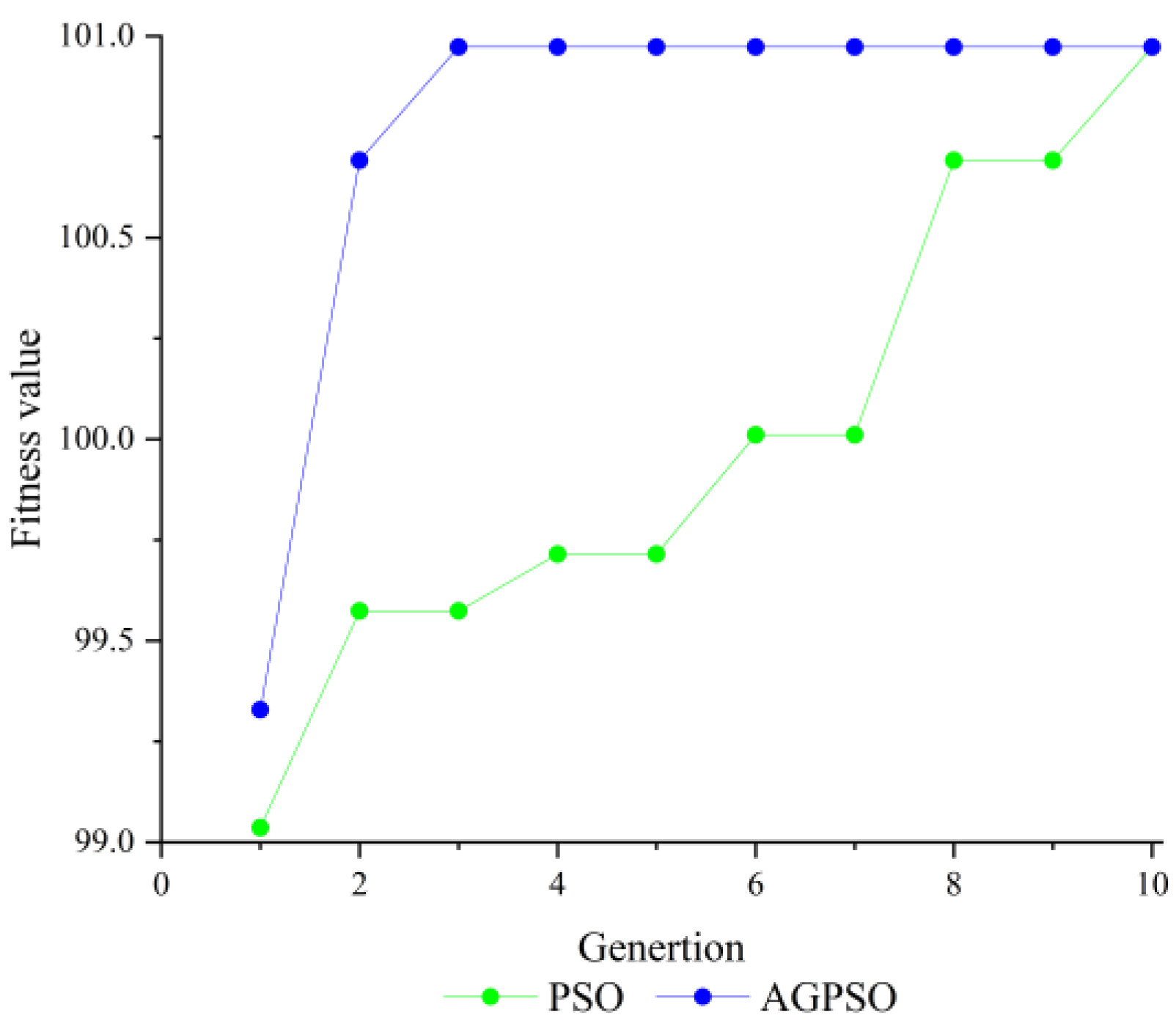
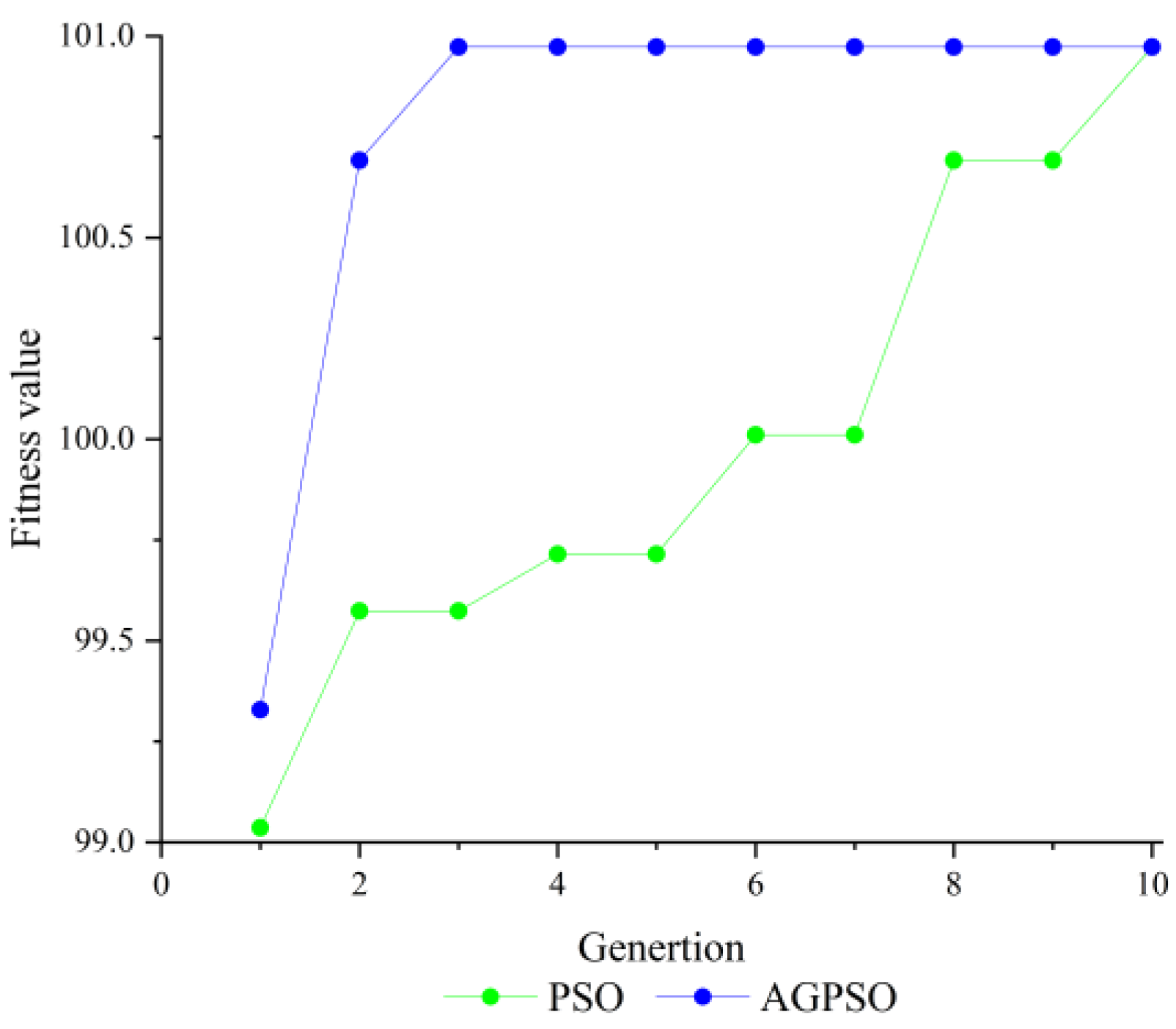
- In the integer ambiguity search, the particle swarm optimization algorithm (PSO) converges faster than the SA and GA algorithms, and the AGPSO algorithm can reach the optimal solution faster compared with the PSO algorithm. Through high-dimensional data simulation, it is verified that the proposed AGPSO algorithm can effectively solve the problem that the PSO algorithm is easy to fall into the local optimum and improves the efficiency of the integer ambiguity search;
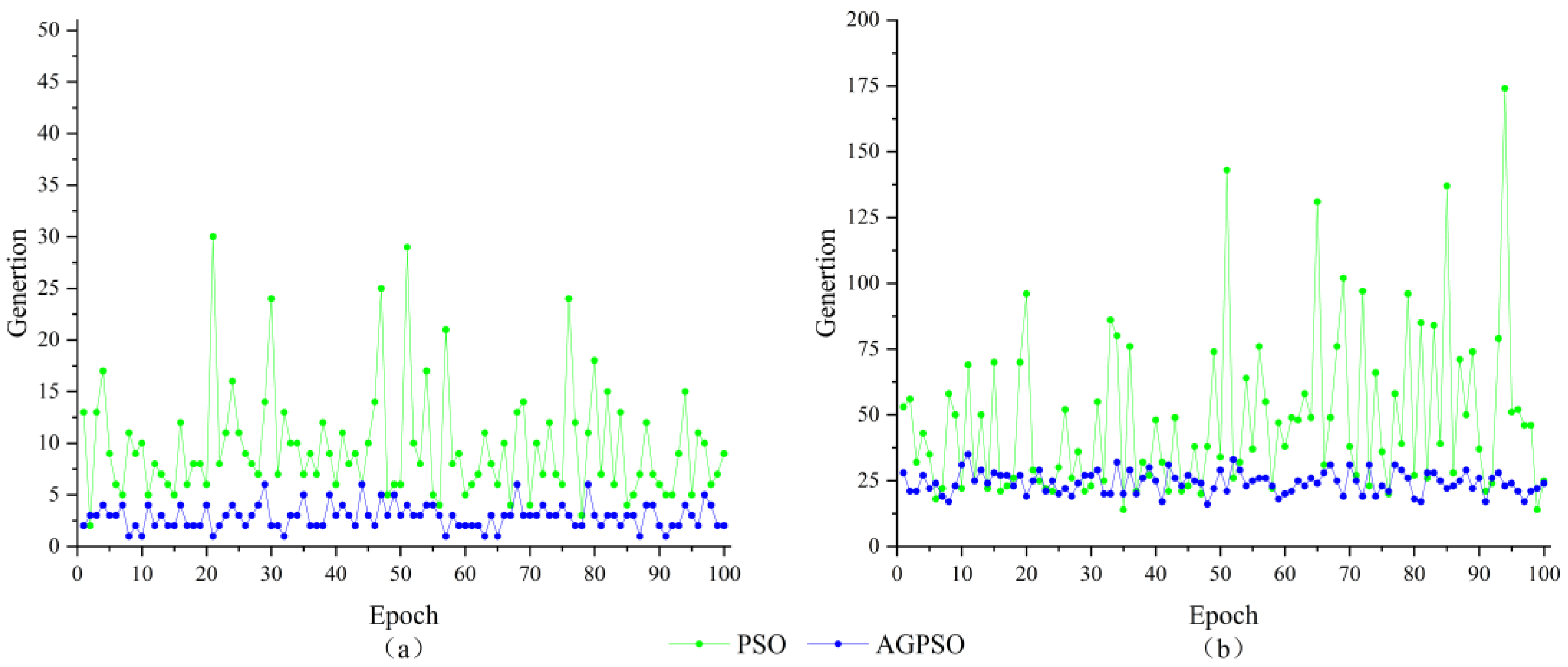
- (2)
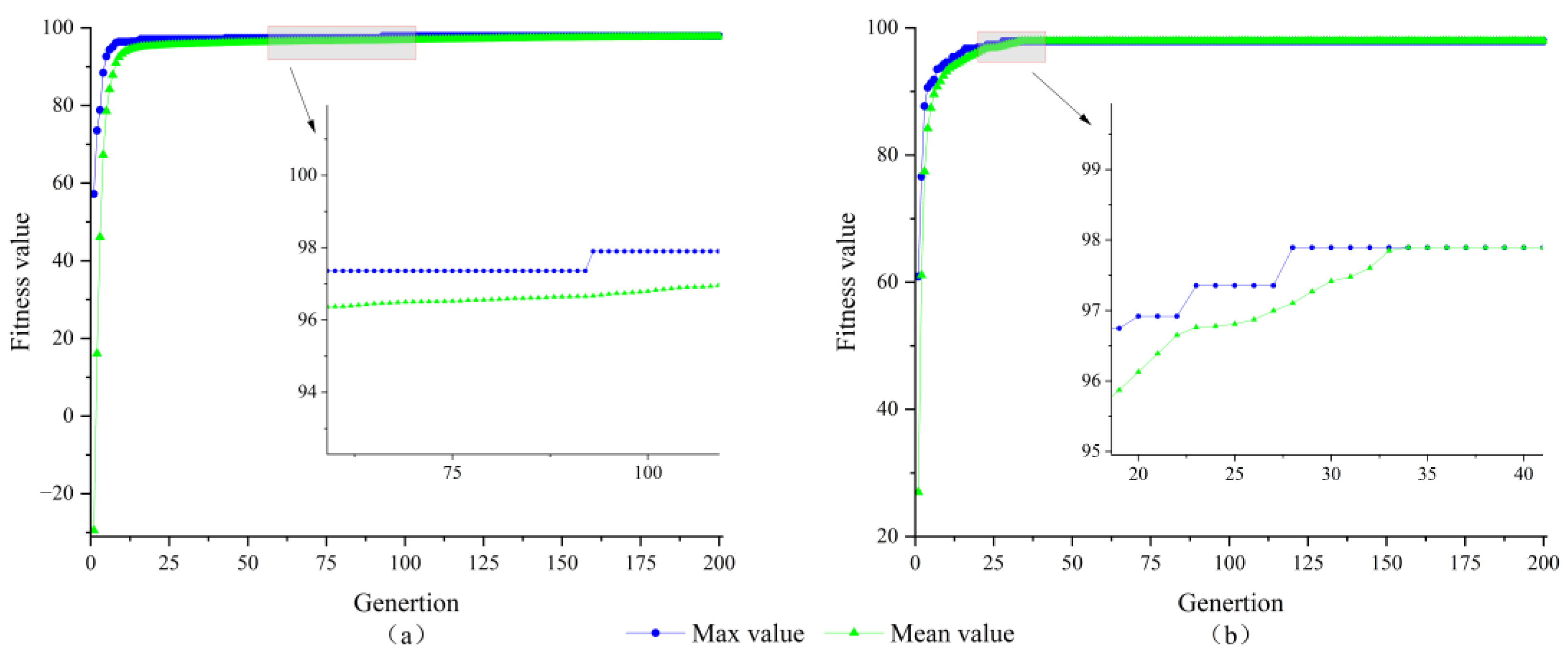
- To eliminate the chance of the test, the PSO algorithm and the AGPSO algorithm were used to search the three-dimensional and twelve-dimensional integer ambiguity 100 times consecutively. The results show that the AGPSO algorithm approximately doubles the convergence speed of the PSO algorithm, and the AGPSO algorithm jumps out of the local optimum more easily than the PSO algorithm, which significantly improves the stability of the results of the integer ambiguity solution;
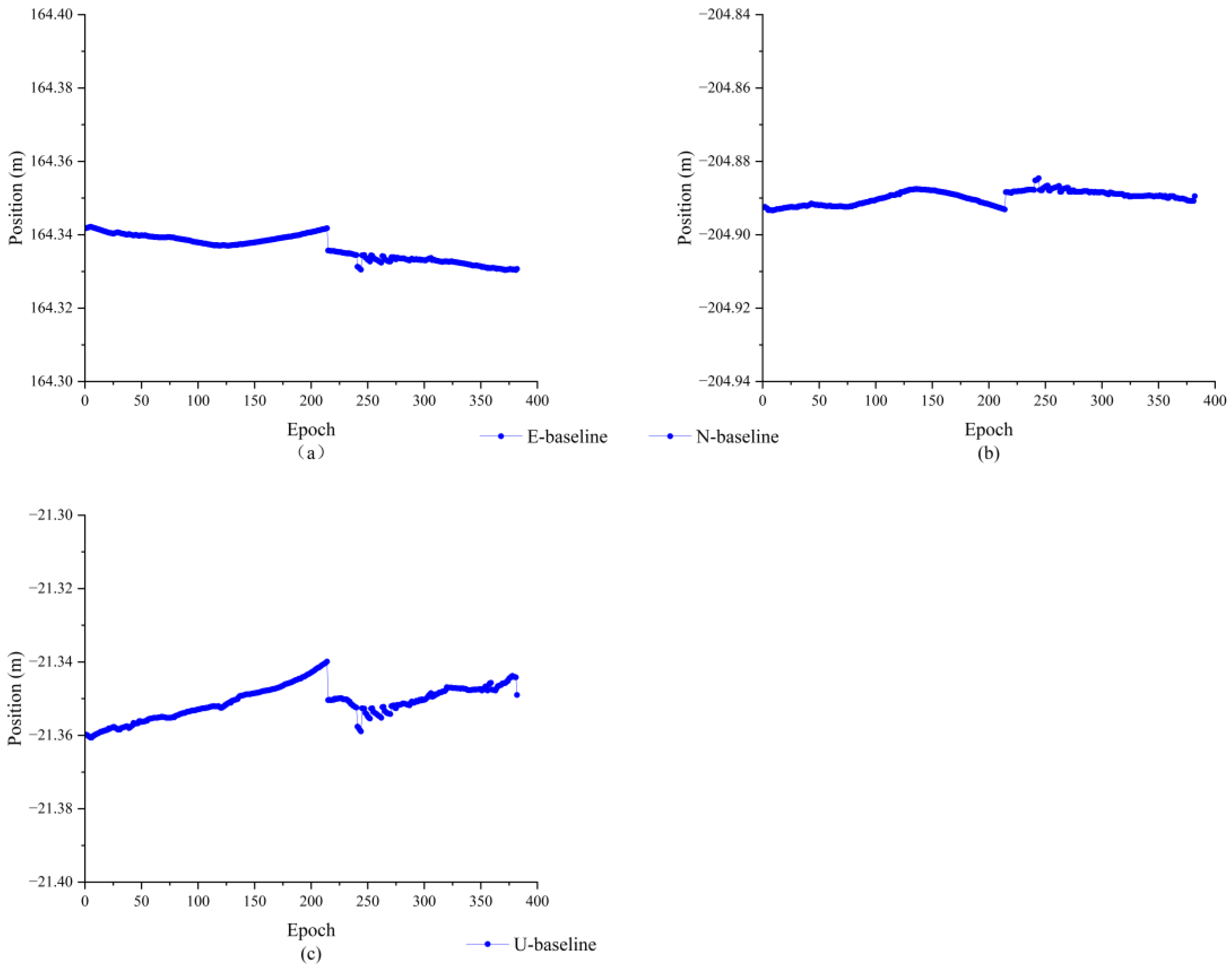
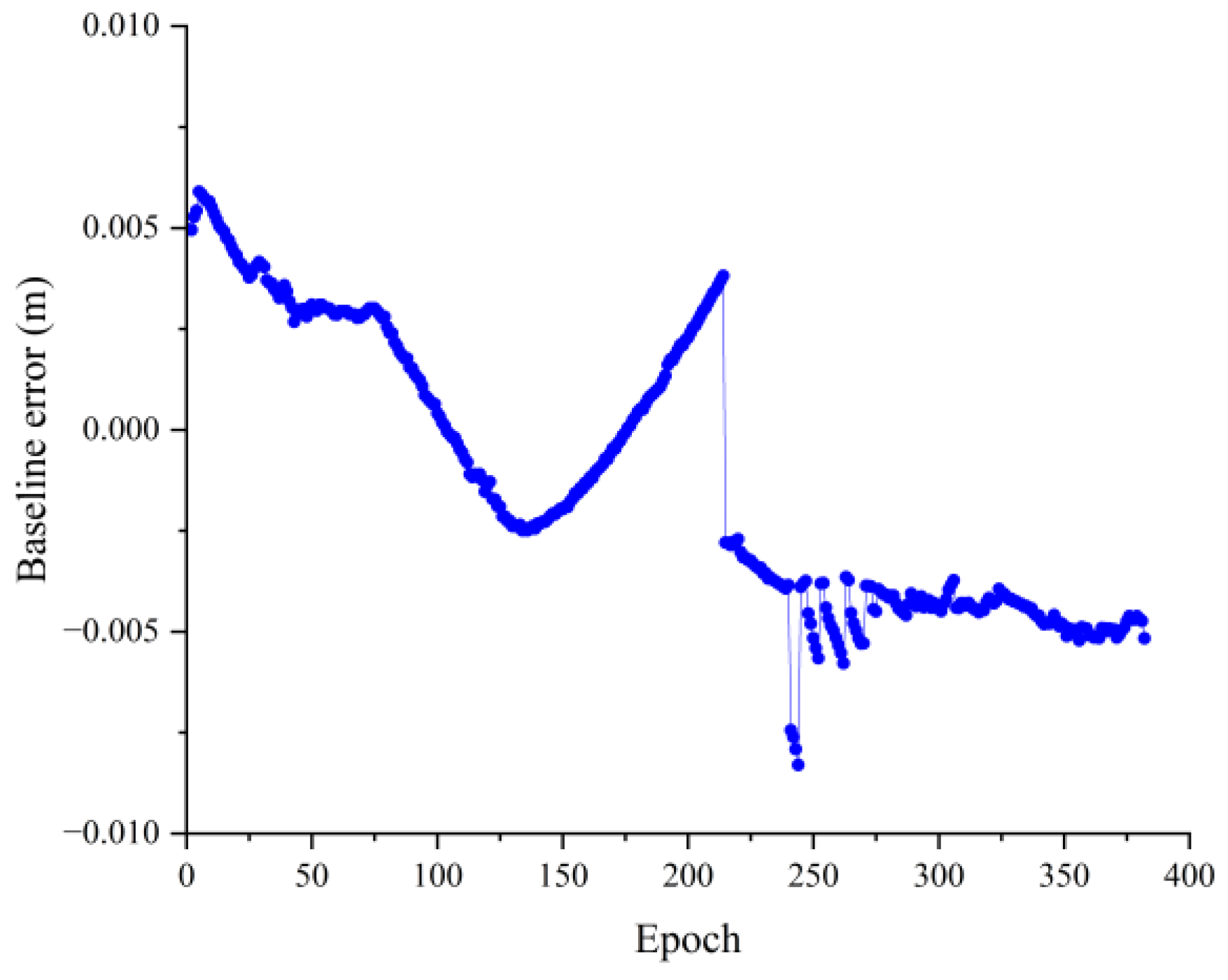
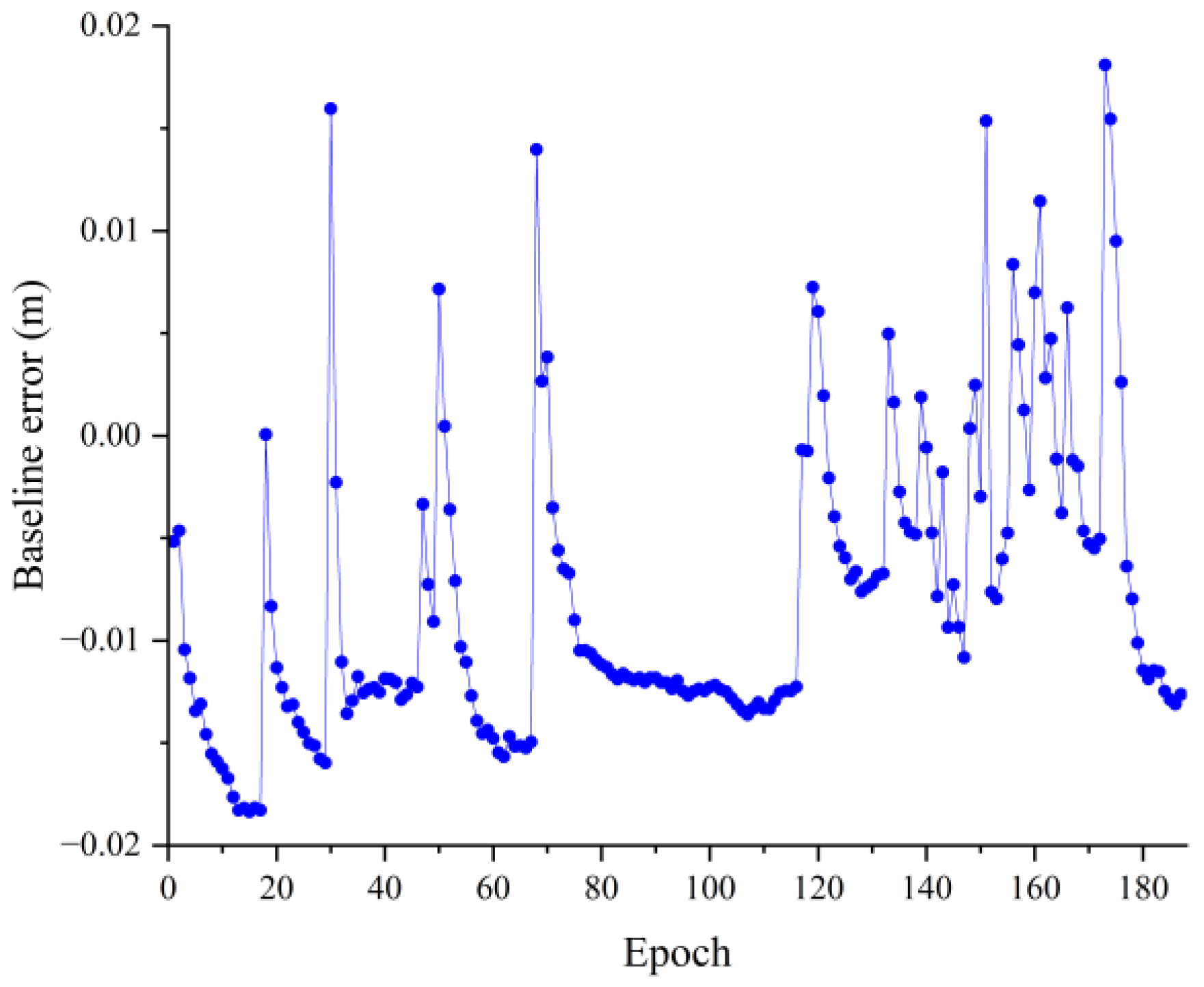
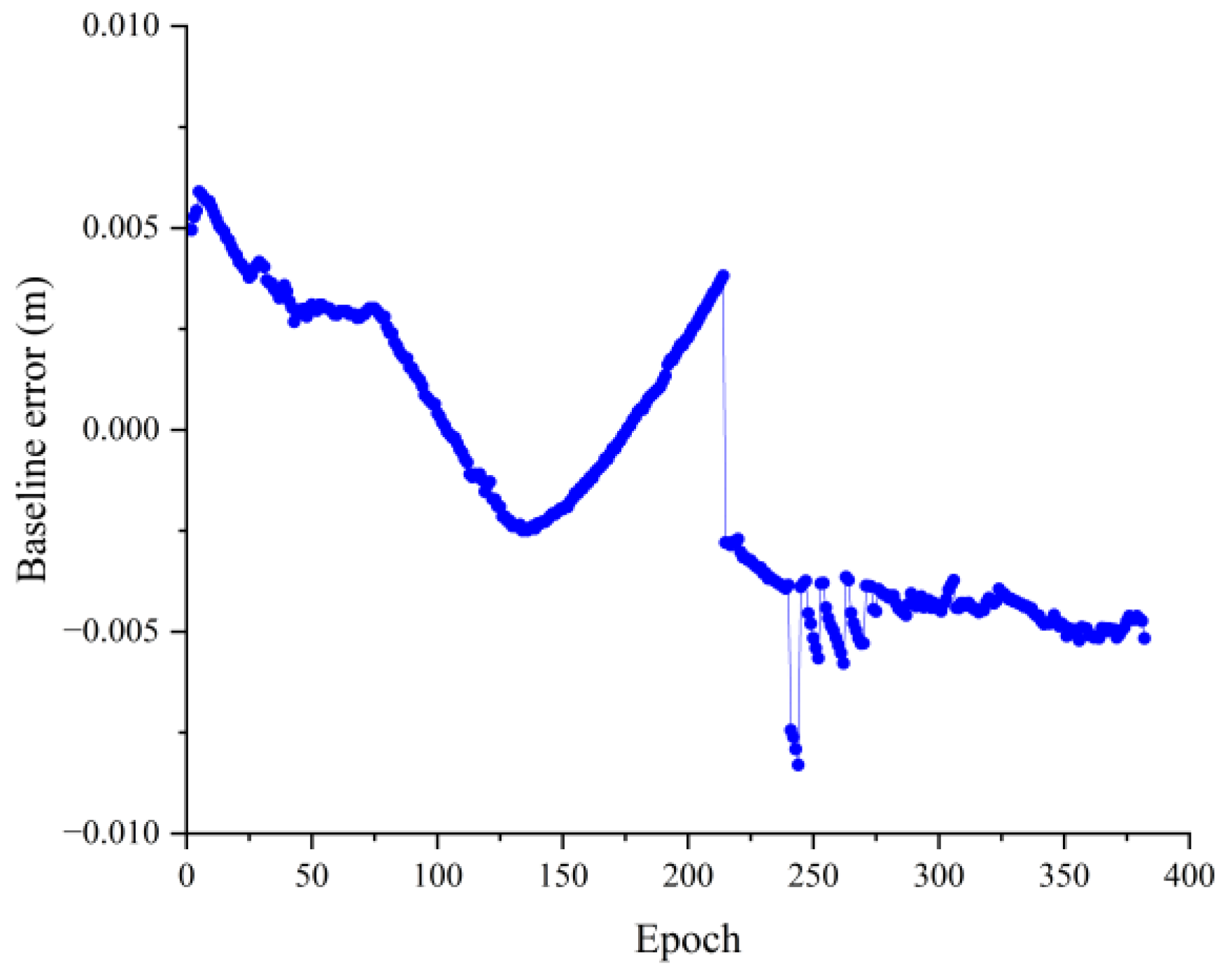
- (3)
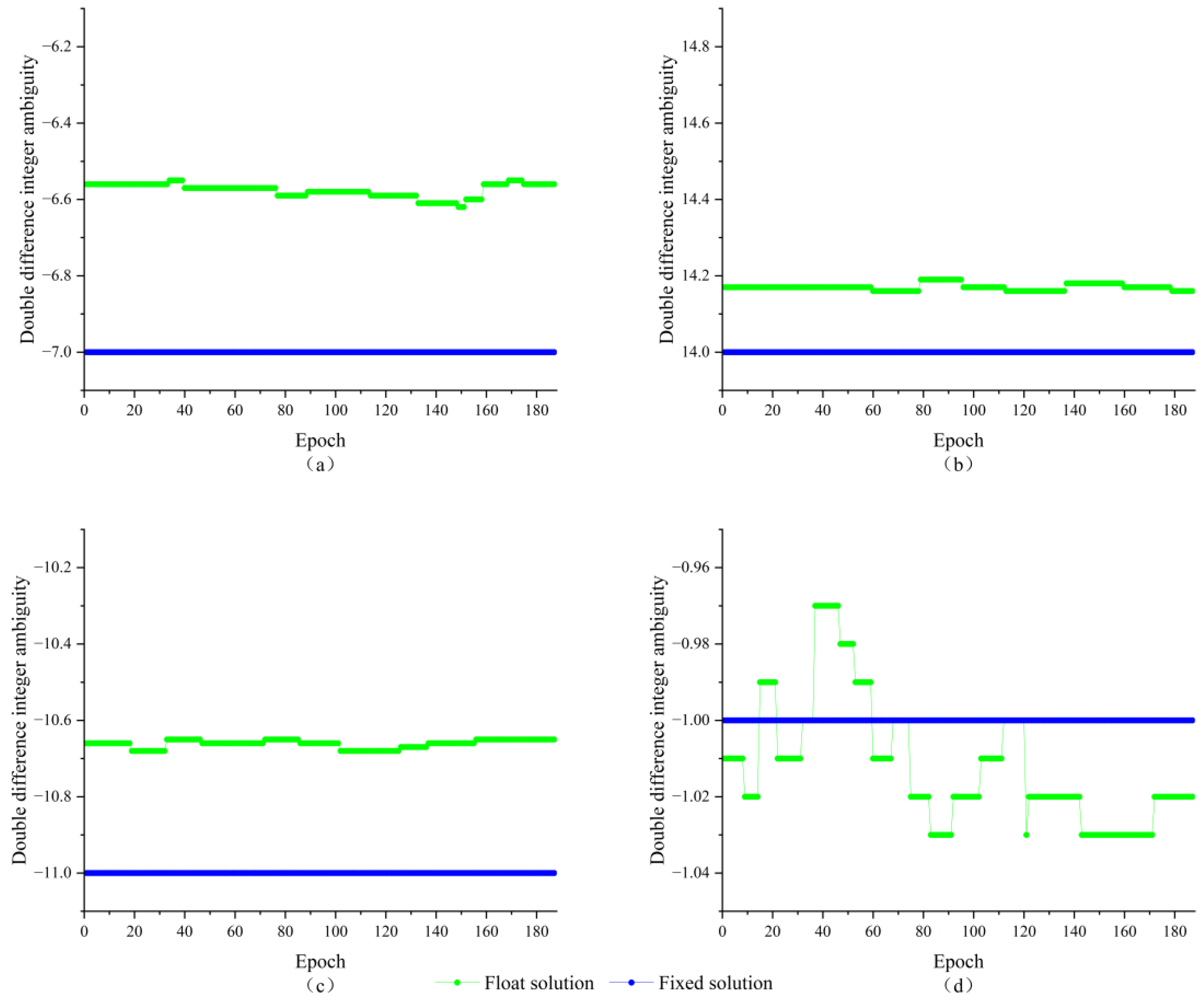
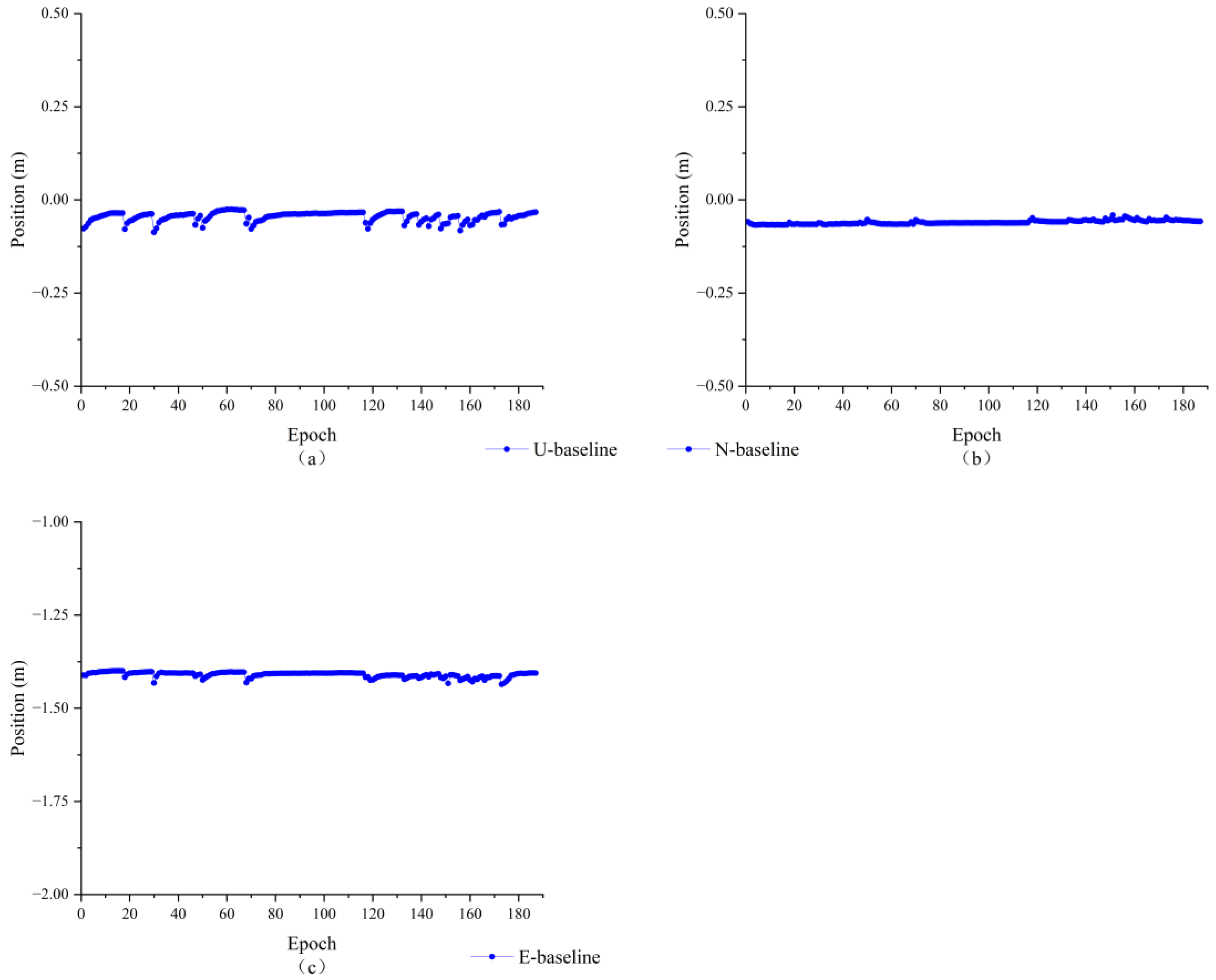
- For GPS L1 single-frequency signal, the AGPSO algorithm is used to search the integer ambiguity after double difference and carry out the baseline solving, the solving result shows that the baseline error is within 0.02 m, which verifies the applicability and validity of the AGPSO algorithm in the practical application. The AGPSO algorithm can be a very good solution to the short baseline solving of the integer ambiguity of searching the problem of inefficiency and instability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiao, Y.; Li, K.; Tian, C.; Zhu, G.; Yue, Z.; Xu, K. Improved GNSS Integer Ambiguity Resolution Method Based on the Column Oriented Cholesky Decomposition. Sci. Rep. 2023, 13, 4454. [Google Scholar] [CrossRef]
- Xu, H.L.; Hu, L.H.; Sun, W. Study on the Application of LSAST on Kinematics Positioning of GPS. J. Missile Guid. 2006, 476–478. [Google Scholar] [CrossRef]
- Ding, J.; Gao, F.; Wang, F.; Liu, H.H. An Improved FARA Algorithm for GPS Integer Ambiguity Resolution. Glob. Position Syst. 2013, 38, 47–50. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The Least-Squares Ambiguity Decorrelation Adjustment: A Method for Fast GPS Integer Ambiguity Estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Verhagen, S.; Li, B.; Teunissen, P.J.G. Ps-LAMBDA: Ambiguity Success Rate Evaluation Software for Interferometric Applications. Comput. Geosci. 2013, 54, 361–376. [Google Scholar] [CrossRef]
- He, X.F.; Hu, X.P. New Algorithm For Fast Integer Ambiguity Resolution. Trans. Nanjing Univ. Aeronaut. Astronau 2005, 160–164. [Google Scholar] [CrossRef]
- Zhao, Q.; Dai, Z.; Hu, Z.; Sun, B.; Shi, C.; Liu, J. Three-Carrier Ambiguity Resolution Using the Modified TCAR Method. GPS Solut. 2015, 19, 589–599. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Integer Least-Squares Theory for the GNSS Compass. J. Geod. 2010, 84, 433–447. [Google Scholar] [CrossRef]
- Chang, X.W.; Yang, X.; Zhou, T. MLAMBDA: A Modified LAMBDA Method for Integer Least-Squares Estimation. J. Geod. 2005, 79, 552–565. [Google Scholar] [CrossRef]
- Pei, B.; Jiang, N.; Pei, T. An Optimal Search Algorithm of Integer Ambiguity in the Satellite Navigation Positioning. In Proceedings of the 2020 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Macau, China, 21–23 August 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, B.; Miao, L.; Wang, S.; Shen, J. A Constrained LAMBDA Method for GPS Attitude Determination. GPS Solut. 2009, 13, 97–107. [Google Scholar] [CrossRef]
- Hu, C.Y.; Zhang, S.Y.; Pei, B.N. An lmproved Integer Ambiguity Resolution Method for GPS/BDS Dual-Mode System. Aerosp. Control 2019, 37, 30–35. [Google Scholar] [CrossRef]
- Ren, C.; Wang, S. An improved LAMBDA method for fast ambiguity fixing. Sci. Surv. Mapp. 2010, 35, 120–121, 135. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Success Probability of Integer GPS Ambiguity Rounding and Bootstrapping. J. Geod. 1998, 72, 606–612. [Google Scholar] [CrossRef]
- Wang, H.; Jia, Y.; Jia, M.; Pei, X.; Wan, Z.; Machado, M.A. Damage Monitoring of Braided Composites Using CNT Yarn Sensor Based on Artificial Fish Swarm Algorithm. Sensors 2023, 23, 7067. [Google Scholar] [CrossRef] [PubMed]
- Fontes, D.B.M.M.; Homayouni, S.M.; Goncalves, J.F. A Hybrid Particle Swarm Optimization and Simulated Annealing Algorithm for the Job Shop Scheduling Problem with Transport Resources. Eur. J. Oper. Res. 2023, 306, 1140–1157. [Google Scholar] [CrossRef]
- Zhu, T.; Li, Y.; Li, Z.; Guo, Y.; Ni, C. Inter-Hour Forecast of Solar Radiation Based on Long Short-Term Memory with Attention Mechanism and Genetic Algorithm. Energies 2022, 15, 1062. [Google Scholar] [CrossRef]
- Yang, J.; Wang, Y.; Chen, Y.; Yu, J. Detection of Weeds Growing in Alfalfa Using Convolutional Neural Networks. Agronomy 2022, 12, 1459. [Google Scholar] [CrossRef]
- Gu, Z.; Zhu, T.; Jiao, X.; Xu, J.; Qi, Z. Evaluating the Neural Network Ensemble Method in Predicting Soil Moisture in Agricultural Fields. Agronomy 2021, 11, 1521. [Google Scholar] [CrossRef]
- Ni, C.; Wang, D.; Tao, Y. Variable Weighted Convolutional Neural Network for the Nitrogen Content Quantization of Masson Pine Seedling Leaves with Near-Infrared Spectroscopy. Spectroc. Acta Pt. A Molec. Biomolec. Spectr. 2019, 209, 32–39. [Google Scholar] [CrossRef]
- Yang, D.; Wang, J.; Yan, X.; Liu, H. Subway Air Quality Modeling Using Improved Deep Learning Framework. Process Saf. Environ. Protect. 2022, 163, 487–497. [Google Scholar] [CrossRef]
- Yu, Y.; Liu, Y.; Chen, J.; Jiang, D.; Zhuang, Z.; Wu, X. Detection Method for Bolted Connection Looseness at Small Angles of Timber Structures Based on Deep Learning. Sensors 2021, 21, 3106. [Google Scholar] [CrossRef] [PubMed]
- Sathiya, V.; Chinnadurai, M.; Ramabalan, S. Mobile Robot Path Planning Using Fuzzy Enhanced Improved Multi-Objective Particle Swarm Optimization (FIMOPSO). Expert Syst. Appl. 2022, 198, 116875. [Google Scholar] [CrossRef]
- Xu, D.; Liu, M.; Zhu, L. Single Frequency GNSS Integer Ambiguity Resolution with Adaptive Genetic Algorithm. In Proceedings of the 2013 IEEE Third International Conference on Information Science and Technology (ICIST), Yangzhou, China, 23–25 March 2013; pp. 1049–1051. [Google Scholar] [CrossRef]
- Li, X.; Guo, J.; Hu, J. An Improved PSO Algorithm and Its Application in GNSS Ambiguity Resolution. Appl. Sci. 2018, 8, 990. [Google Scholar] [CrossRef]
- Tatiyaworanun, C.; Purivigraipong, S. The Resolving Integer Ambiguity Cycle of GPS Carrier Phase Difference Using GA-GSO. In Proceedings of the 2013 10th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Krabi, Thailand, 15–17 May 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, Y. Integer Ambiguity Solution Based on Artificial Swarm Algorithm. In Proceedings of the 2016 5th International Conference on Measurement, Instrumentation and Automation (ICMIA 2016), Shenzhen, China, 17–18 September 2016; Atlantis Press: Amsterdam, The Netherlands, 2016. [Google Scholar] [CrossRef]
- Jazaeri, S.; Amiri-Simkooei, A.R.; Sharifi, M.A. Fast GNSS Ambiguity Resolution by Ant Colony Optimisation. Surv. Rev. 2013, 45, 190–196. [Google Scholar] [CrossRef]
- Dou, Z.; Wu, Y. Integer Ambiguity Search Algorithm Based on Adaptive Differential Evolution Algorithm. In Proceedings of the Eleventh International Conference on Graphics and Image Processing (ICGIP 2019), Hangzhou, China, 12–14 October 2020; Pan, Z., Wang, X., Eds.; SPIE: Washington, DC, USA, 2020; p. 107. [Google Scholar] [CrossRef]
- Zheng, Q.H.; Zhang, Y.L. Ambiguity Resolution using Genetic Algorithm. J. Natl. Univ. Def. Technol. 2001, 23, 5–10. [Google Scholar] [CrossRef]
- Xing, Z.; Fan, M. Solving integer ambiguity using improved genetic algorithm. Sci. Surv. Mapp. 2011, 36, 110–113. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, X.Z.; Zhang, Y.; Li, W. Reswarch On Ambiguity Resolution Of GPS Short Baseline By Using Improved Particle Swarm Optimization. Geod. Geodyn. 2012, 32, 148–151. [Google Scholar] [CrossRef]
- Zhang, B.; Shang, J.N. DGPS integer ambiguity fast resolution based on improved particle swarm optimization algorithm. Transducer Microsyst. Technol. 2020, 39, 129–131, 135. [Google Scholar] [CrossRef]
- Li, H.G.; Wang, Y.Q.; Li, X.Q.; Kang, J.J. Solving Integer Ambiguity Based on Genetic Algorithm with lmproved Simulated Annealing. J. Jishou Univ. (Nat. Sci. Ed.) 2018, 39, 9–14. [Google Scholar] [CrossRef]
- Liu, X.H.; Shang, J.N.; Sun, J.Q.; Zhang, D.L.; Shi, H.L. An lmproved Ant Colony Algorithm for DGPS Integer Ambiguity Resolution. Aerosp. Control 2021, 39, 58–63. [Google Scholar] [CrossRef]
- Wang, Y.G.; Wang, L.; Teng, H.L.; Zhang, Z.L. DGPS integer ambiguity fast fixation based on improved artificial fish swarm algorithm. J. Chin. Inert. Technol. 2016, 24, 619–623. [Google Scholar] [CrossRef]
- Ou, Y.L.; Huang, C.L. Solution method of DGPS integer ambiguity based on ICSO. Glob. Position Syst. 2020, 45, 41–47, 62. [Google Scholar] [CrossRef]
- Shang, J.N.; Wang, M.D.; Liu, X.H.; Wang, Y.T. Improved PSO and ACO hybrid search algorithm for GNSS integer ambiguity. J. Chin. Inert. Technol. 2021, 29, 350–355, 361. [Google Scholar] [CrossRef]
- Deng, H.G.; Chen, G.; Ji, Y.F.; Sun, X.Y. Integer Ambiguity Resolution Based on Adaptive Weighting Differential Evolution Algorithm. Comput. Simul. 2022, 39, 327–332. [Google Scholar] [CrossRef]
- Xi, R.; Xu, D.; Jiang, W.; He, Q.; Zhou, X.; Chen, Q.; Fan, X. Elimination of GNSS Carrier Phase Diffraction Error Using an Obstruction Adaptive Elevation Masks Determination Method in a Harsh Observing Environment. GPS Solut. 2023, 27, 139. [Google Scholar] [CrossRef]
- Scataglini, T.; Pagola, F.; Cogo, J.; Garcia, J.G. Attitude Estimation Using GPS Carrier Phase Single Differences. IEEE Latin Am. Trans. 2014, 12, 847–852. [Google Scholar] [CrossRef]
- Rudzinski, L.; Debski, W. Extending the Double Difference Location Technique-Improving Hypocenter Depth Determination. J. Seismol. 2013, 17, 83–94. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. A New Method For DGPS Ambiguity Resolution? J. Navig. 2011, 64, 375–379. [Google Scholar] [CrossRef]
- Fernández-Plazaola, U.; Martín-Guerrero, T.M.; Entrambasaguas, J.T. A New Method for Three-Carrier GNSS Ambiguity Resolution. J. Geod. 2008, 82, 269–278. [Google Scholar] [CrossRef]
- Ding, F. Least Squares Parameter Estimation and Multi-Innovation Least Squares Methods for Linear Fitting Problems from Noisy Data. J. Comput. Appl. Math. 2023, 426, 115107. [Google Scholar] [CrossRef]
- Rizos, C.; Han, S. A New Method for Constructing Multi-Satellite Ambiguity Combinations for Lmproved Ambiguity Resolution. In Proceedings of the 8th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1995), Palm Springs, CA, USA, 12–15 September 1995; pp. 1145–1153. [Google Scholar]
- Lapidus, M.L.; van Frankenhuijsen, M.; Voskanian, E.K. Quasiperiodic Patterns of the Complex Dimensions of Nonlattice Self-Similar Strings, via the LLL Algorithm. Mathematics 2021, 9, 591. [Google Scholar] [CrossRef]
- Xu, P. Random Simulation and GPS Decorrelation; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar] [CrossRef]
- Liu, Z.P.; He, X.F.; Guo, G.L.; Zha, J.F. Decorrelation Algorithms and lts Evaluation Indexes for GNSS Ambiguity Solution. J. Wuhan Univ. (Inf. Sci. Ed.) 2011, 36, 257–261. [Google Scholar] [CrossRef]
- Mu, B.; Wen, S.; Yuan, S.; Li, H. PPSO: PCA Based Particle Swarm Optimization for Solving Conditional Nonlinear Optimal Perturbation. Comput. Geosci. 2015, 83, 65–71. [Google Scholar] [CrossRef]
- Hu, X.; Eberhart, R.C.; Shi, Y. Engineering Optimization with Particle Swarm. In Proceedings of the 2003 IEEE Swarm Intelligence Symposium, SIS’03 (Cat. No.03EX706), Indianapolis, IN, USA, 26 April 2003; pp. 53–57. [Google Scholar] [CrossRef]
- Yang, Y.; Zhuang, Z.; Yu, Y. Defect Removal and Rearrangement of Wood Board Based on Genetic Algorithm. Forests 2022, 13, 26. [Google Scholar] [CrossRef]
- Nonoyama, K.; Liu, Z.; Fujiwara, T.; Alam, M.M.; Nishi, T. Energy-Efficient Robot Configuration and Motion Planning Using Genetic Algorithm and Particle Swarm Optimization. Energies 2022, 15, 2074. [Google Scholar] [CrossRef]
- Nakamura, D.M.; Tessaro, Y.V.; Furuie, S.S.; Coto, N.P. Color Formulation in Maxillofacial Elastomer by Genetic Algorithm. Dye. Pigment. 2021, 196, 109820. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. An Optimality Property of the Integer Least-Squares Estimator. J. Geod. 1999, 73, 587–593. [Google Scholar] [CrossRef]
- Jonge, P.D.; Tiberius, C. Integer Ambiguity Estimation with the Lambda Method; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Verhagen, S. The GNSS Ambiguity Ratio-Test Revisited: A Better Way of Using It. Surv. Rev. 2009, 41, 138–151. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 2.05 | |
| 2.05 | |
| 0.4–0.9 | |
| 100 | |
| 12 | |
| 200 |
| Base Line (m) | Method | Epochs | Success Epochs | Success Rate (%) |
|---|---|---|---|---|
| 263.52 | LAMBDA | 364 | 350 | 96.15 |
| AGPSO | 364 | 349 | 95.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.-Q.; Zhang, Y.; Xu, Z.-D.; Fang, Y.; Zhang, Z.-W. Single-Frequency GNSS Integer Ambiguity Solving Based on Adaptive Genetic Particle Swarm Optimization Algorithm. Sensors 2023, 23, 9353. https://doi.org/10.3390/s23239353
Guo Y-Q, Zhang Y, Xu Z-D, Fang Y, Zhang Z-W. Single-Frequency GNSS Integer Ambiguity Solving Based on Adaptive Genetic Particle Swarm Optimization Algorithm. Sensors. 2023; 23(23):9353. https://doi.org/10.3390/s23239353
Chicago/Turabian StyleGuo, Ying-Qing, Yan Zhang, Zhao-Dong Xu, Yu Fang, and Zhi-Wei Zhang. 2023. "Single-Frequency GNSS Integer Ambiguity Solving Based on Adaptive Genetic Particle Swarm Optimization Algorithm" Sensors 23, no. 23: 9353. https://doi.org/10.3390/s23239353
APA StyleGuo, Y.-Q., Zhang, Y., Xu, Z.-D., Fang, Y., & Zhang, Z.-W. (2023). Single-Frequency GNSS Integer Ambiguity Solving Based on Adaptive Genetic Particle Swarm Optimization Algorithm. Sensors, 23(23), 9353. https://doi.org/10.3390/s23239353