
Design and Experimental Assessment of Real-Time Anomaly Detection Techniques for Automotive Cybersecurity



Abstract
:1. Introduction
1.1. Motivations for CAN Cybersecurity
1.2. The State-of-the-Art on CAN Cybersecurity
- (1)
- (2)
- Intrusion Detection System (IDS): IDS is a popular security solution that uses crypto- graphic-based software to address CAN network security issues. The IDS ensures that the exchanged CAN data frame between the two end nodes is authorized. Researchers have proposed various IDS algorithms, such as a lightweight algorithm based on the observance of CAN packets frequencies, an anomaly-based detection method based on the time interval feature of the consecutive CAN packets, and a graph-based feature method that uses machine learning algorithms [30,31,32,33,34,35,36,37,38,39,40,41,42].
- (3)
- CAN-ADF: The Controller Area Network Attack Detection Framework (CAN-ADF) is a framework that uses field classification, modeling, and anomaly detection to detect cyber-attacks on unknown CAN bus networks. The framework uses a holistic approach to detect cyber-attacks and provides a comprehensive solution to the cybersecurity issues related to the CAN protocol [43,44].
- (4)
- Deep Learning Techniques: Intrusion Detection Systems (IDSs) using deep learning techniques are also proposed in the literature. These IDSs identify cyber-attacks when given a sample of network traffic collected from real-world computer networks. The IDSs using deep learning techniques are powerful and can detect cyber-attacks with high accuracy [45,46,47,48,49].
- (1)
- Clock-based IDS (CIDS): CIDS is an anomaly-based intrusion detection system that measures and exploits the intervals of periodic in-vehicle messages for fingerprinting ECUs. The fingerprints are then used for constructing a baseline of the ECUs’ clock behaviors with the Recursive Least Squares (RLS) algorithm. Based on this baseline, CIDS uses Cumulative Sum (CUSUM) to detect any abnormal shifts in the identification of errors, which is a clear sign of intrusion [50,51,52,53,54,55,56].
- (2)
- Physical-Fingerprinting of Electronic Control Unit (ECU) Based on Machine Learning Algorithm: This algorithm uses machine learning algorithms to identify the physical fingerprints of ECUs based on the time and frequency domain features of the consecutive CAN packets. The algorithm classifies the ECUs based on their physical fingerprints and detects any abnormal behavior [57,58,59,60,61,62,63,64].
- (3)
- ECU Fingerprinting through Parametric Signal Modeling and Artificial Neural Networks: This algorithm uses parametric signal modeling and Artificial Neural Networks to identify the physical fingerprints of ECUs. The algorithm extracts the features of the CAN packets and uses them to train the Artificial Neural Network. The trained network is then used to classify the ECUs and to detect any abnormal behavior [65,66,67,68,69,70].
- (4)
- Two-Point Voltage Fingerprinting: This algorithm uses voltage measurements to identify the physical fingerprints of ECUs. The algorithm measures the voltage at two points in the CAN bus and uses the difference between the two measurements to identify the ECU. The algorithm can detect any masquerading attacks on the CAN bus [71,72,73,74,75,76].
2. Background on CAN Cybersecurity
2.1. CAN Protocol Basics
- Simplicity of Wiring: The CAN bus operates on a message-oriented approach, rather than an address-oriented one. This design allows for the straightforward addition or removal of peripherals (nodes), simplifying the wiring process.
- Rigid Response Times: CAN bus technology enables the creation of systems with highly predictable and rigid response times. This is achieved through specific techniques that are designed to minimize time-related delays.
- High Immunity to Interference: The ISO 11898 standard mandates that the CAN protocol must maintain operability, even in scenarios where one of the two wires is severed, or if a bus line to the power supply experiences a short-circuit.
- Error Confinement: Each peripheral device connected to the CAN bus possesses the capability to self-diagnose hardware issues. In the event of a malfunction, a peripheral can voluntarily remove itself from the bus, allowing other peripherals to continue using it.
- Multi-Master Protocol: Within the CAN protocol, every node has the capacity to compete for control of the bus. This means that each node can assume the role of a master, taking control of the bus and initiating transmissions.
2.2. Vulnerabilities and Attack Scenarios
- The broadcast transmission characteristic of the CAN bus, where the frames are disseminated to all interconnected ECUs, acts as a double-edged sword, facilitating system-wide communication, but also enabling unauthorized eavesdropping, which jeopardizes the confidentiality of the communication.
- The priority-based arbitration, which allows frames with higher priority to dominate the communication channel, poses a significant security risk, as it enables an aggressive Electronic Control Unit (ECU) to manipulate the communication channel, potentially disrupting the entire network’s functioning [88,89,90].
- The limited bandwidth and payload capacity of the CAN bus results in the insufficiency of robust access control mechanisms, creating a vulnerability that could be exploited by adversaries attempting to compromise the security of the system.
- (1)
- (2)
- (3)
- (4)
- (5)
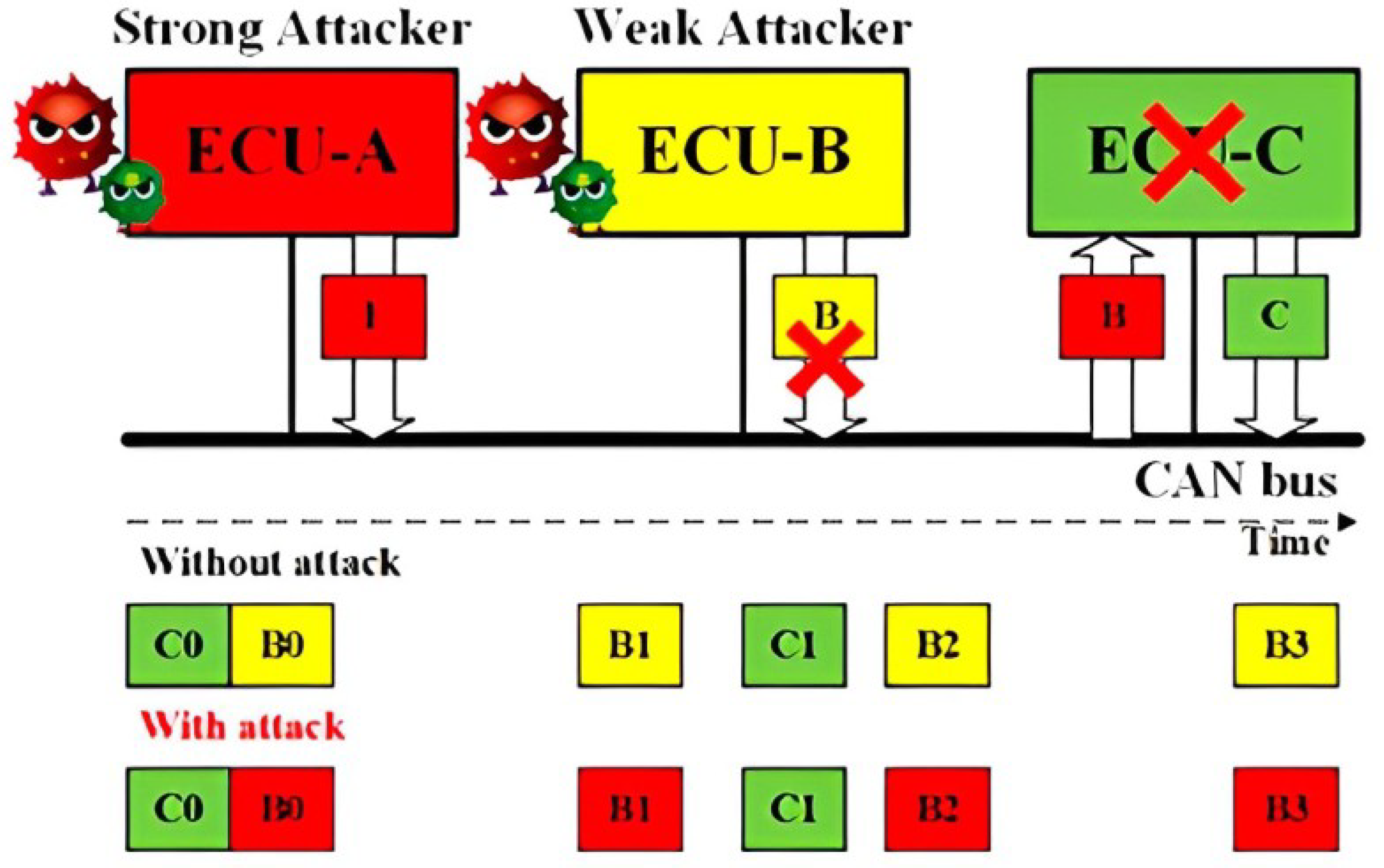
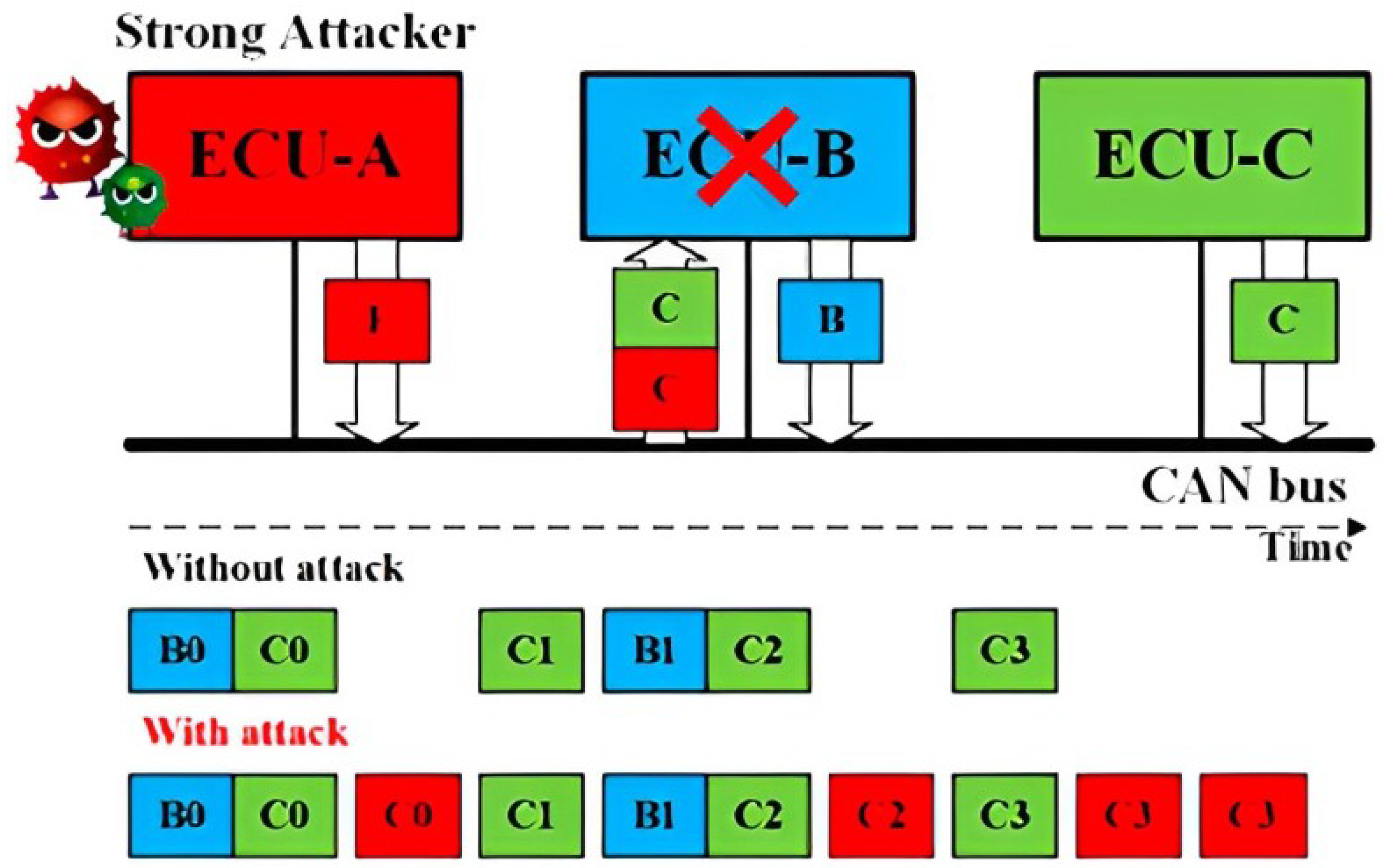
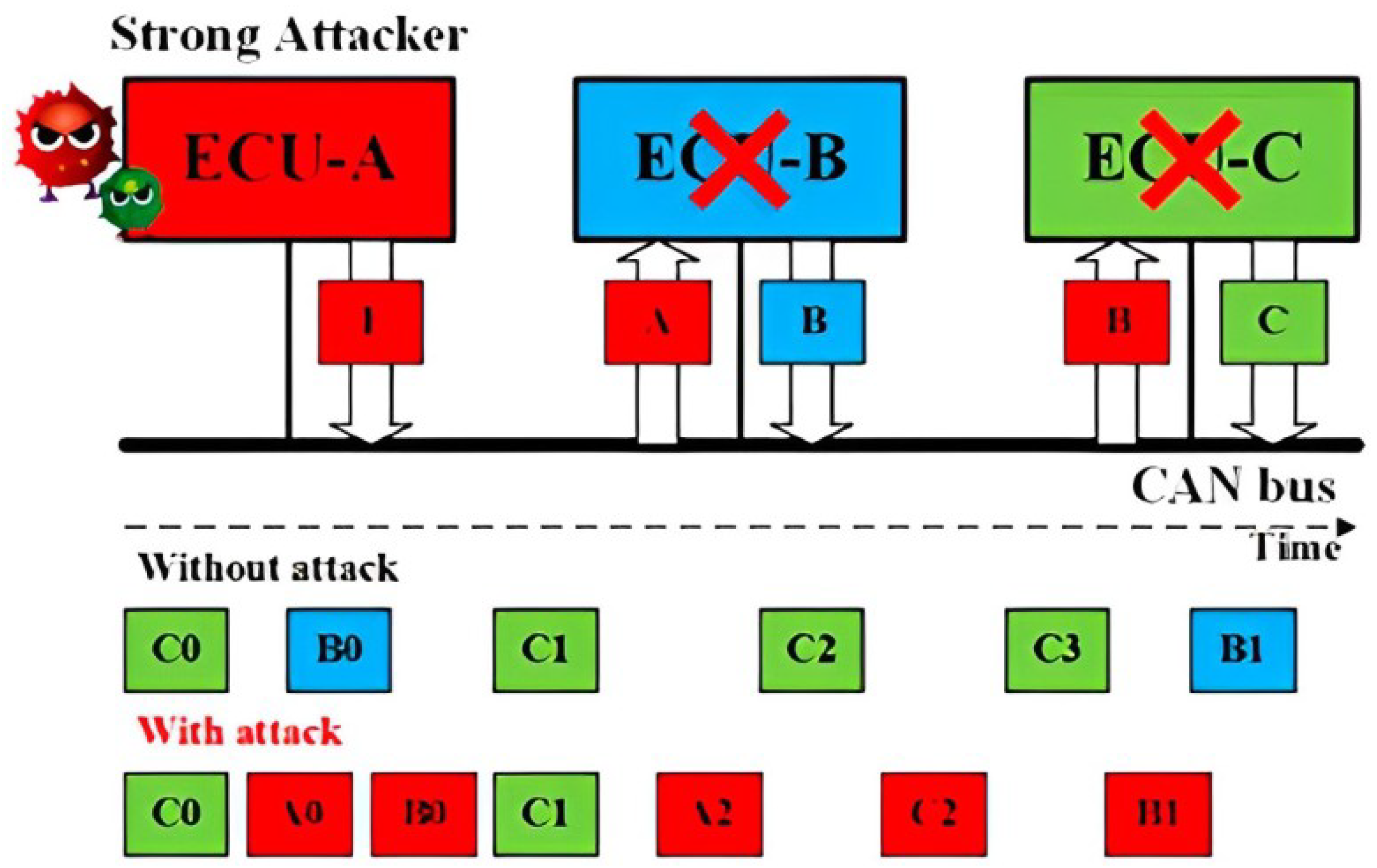
- Replay Attack for CAN: Without authentication and integrity for the CAN frames, a Strong Attack is able to launch the replay attack. As shown in Figure 1, a fully compromised ECU A transmits the CAN frames received from the ECU C, modifying its data field. As a result, the receiver ECU B will function abnormally under the replayed control information.
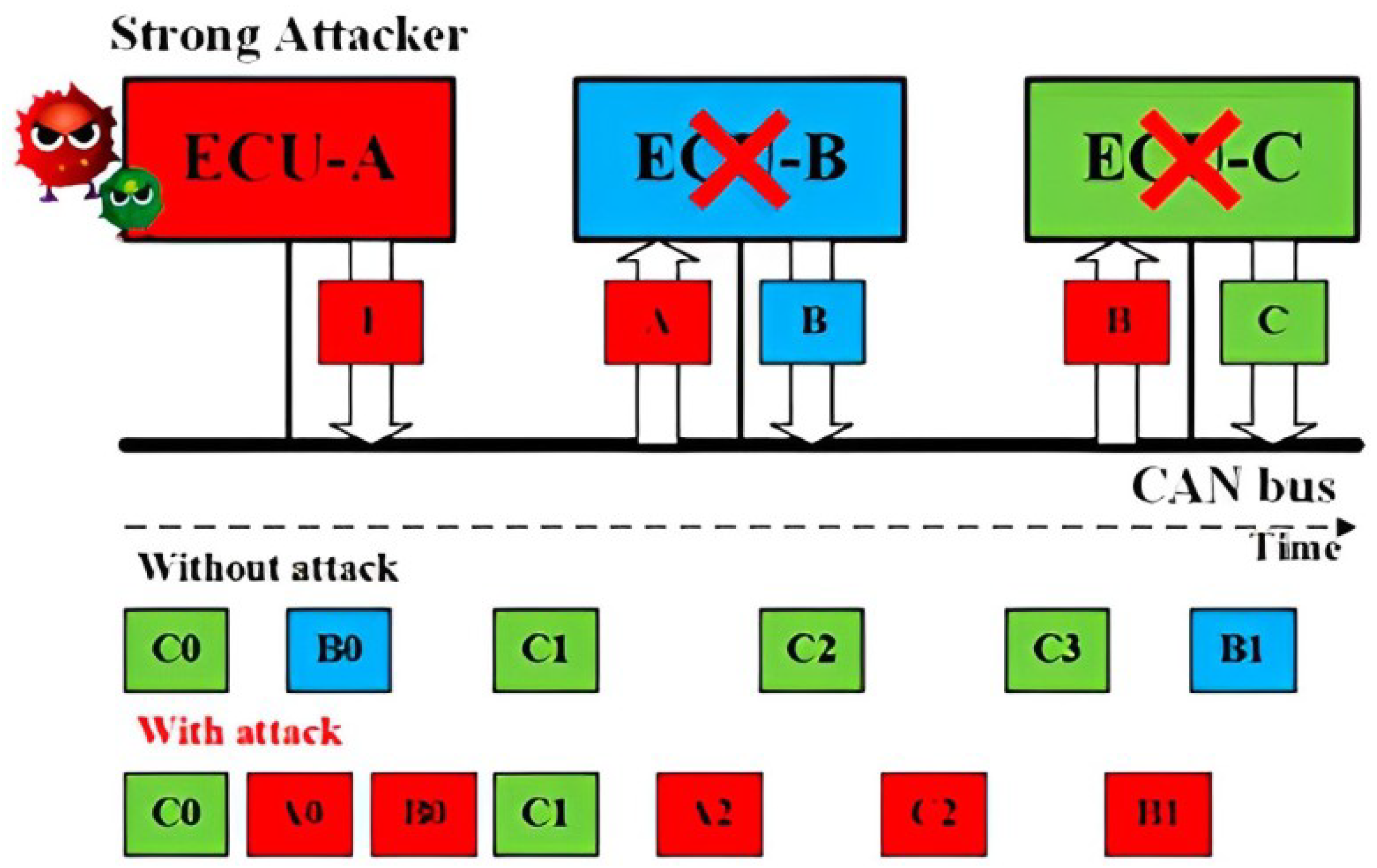
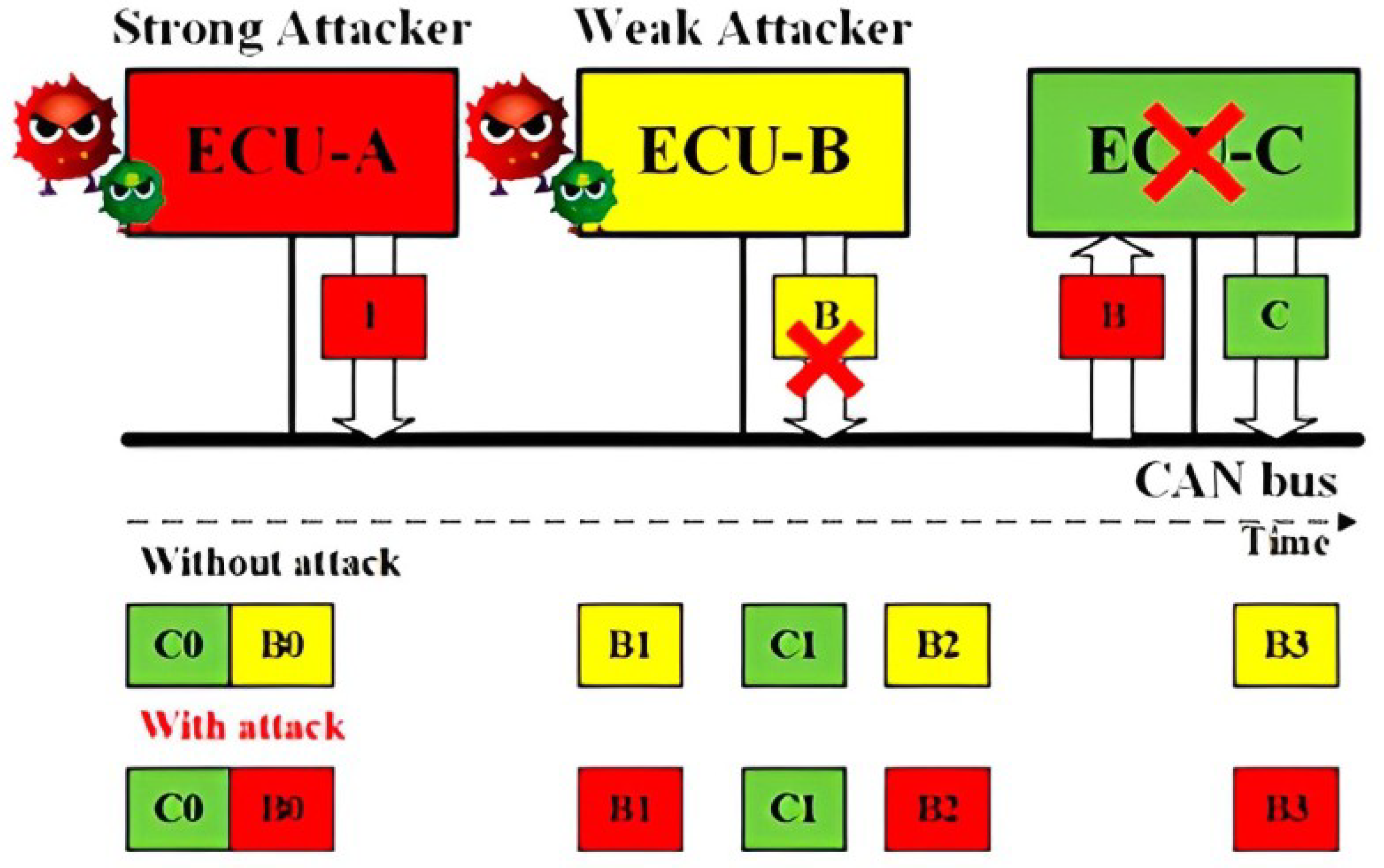
- Impersonation Attack for CAN: Having known the IDs of the CAN frames from ECU B, the Strong Attack is able to launch the impersonation attack, as shown in Figure 2. The Weak Attacker first suspends the transmission of ECU B, and the strong attacker then controls ECU A to transmit the CAN frames using the ID of ECU B to manipulate the target, ECU C.
- Injection Attack for CAN: As shown in Figure 3, a Strong Attacker ECU A is able to inject CAN frames with arbitrary IDs and content. On the one hand, the injected frames with the highest priority ID will always occupy the CAN bus. On the other hand, it can compromise the functionality of the bus occupying the transmission.
3. Proposed Algorithm Design
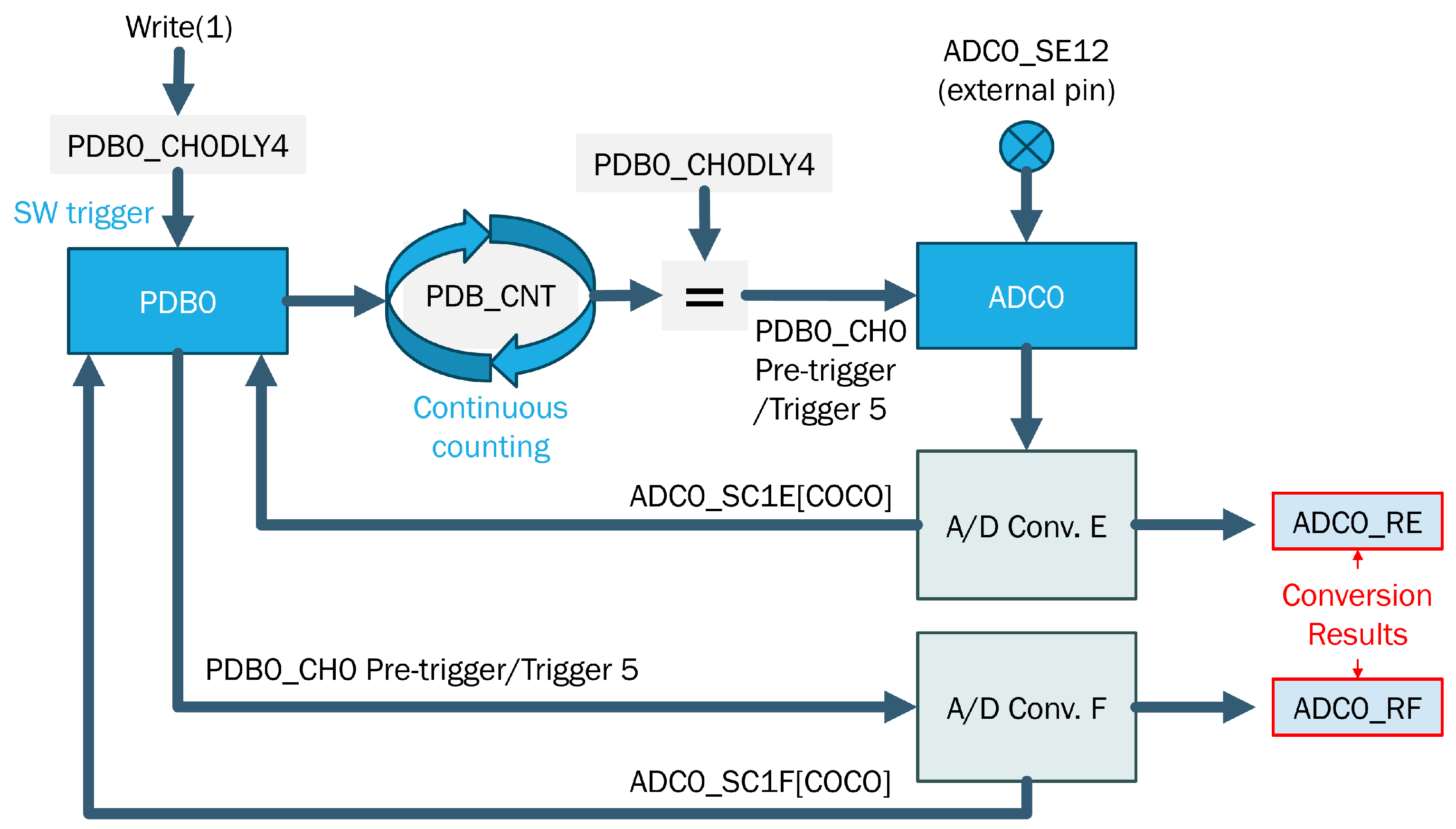
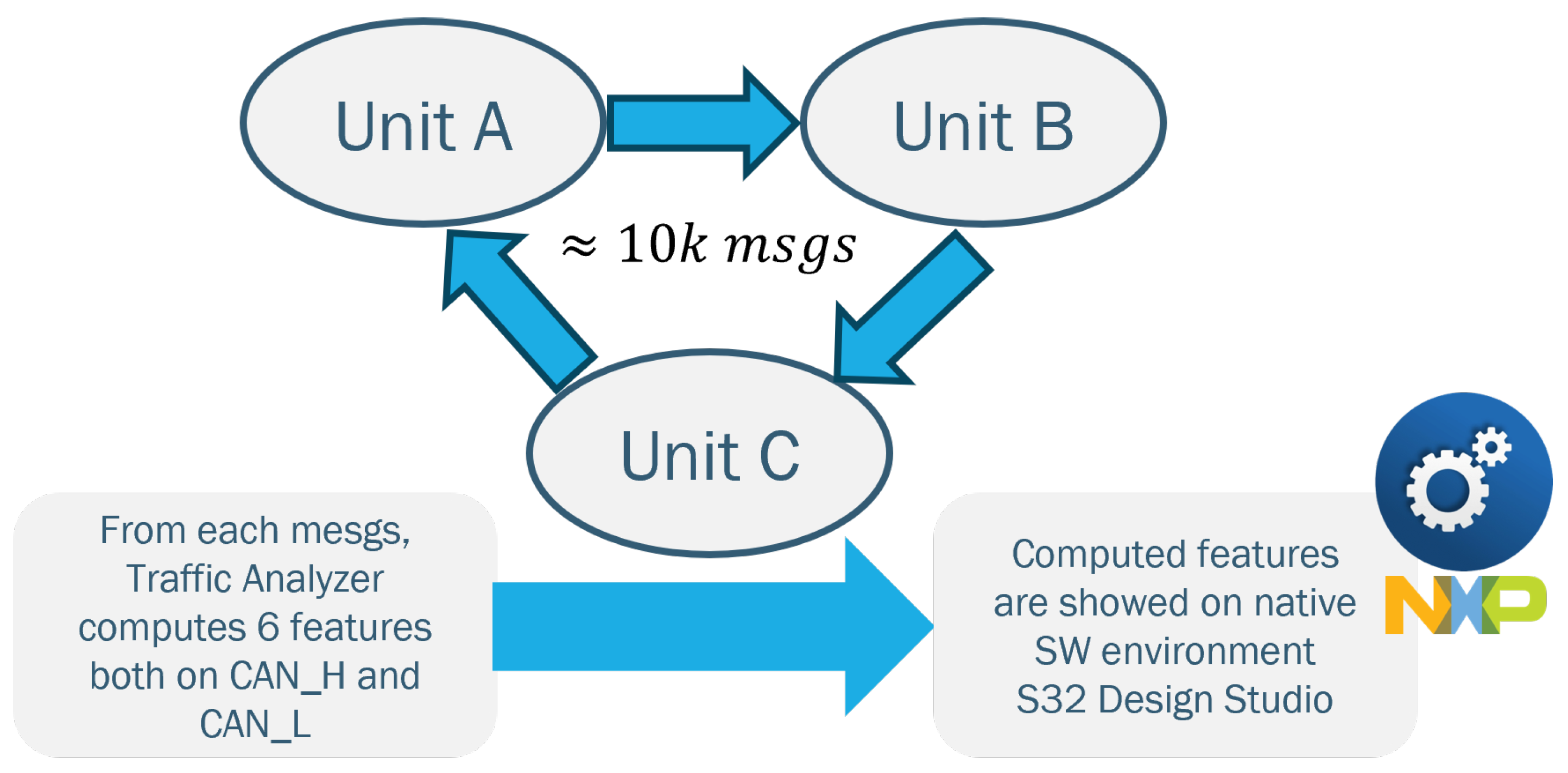
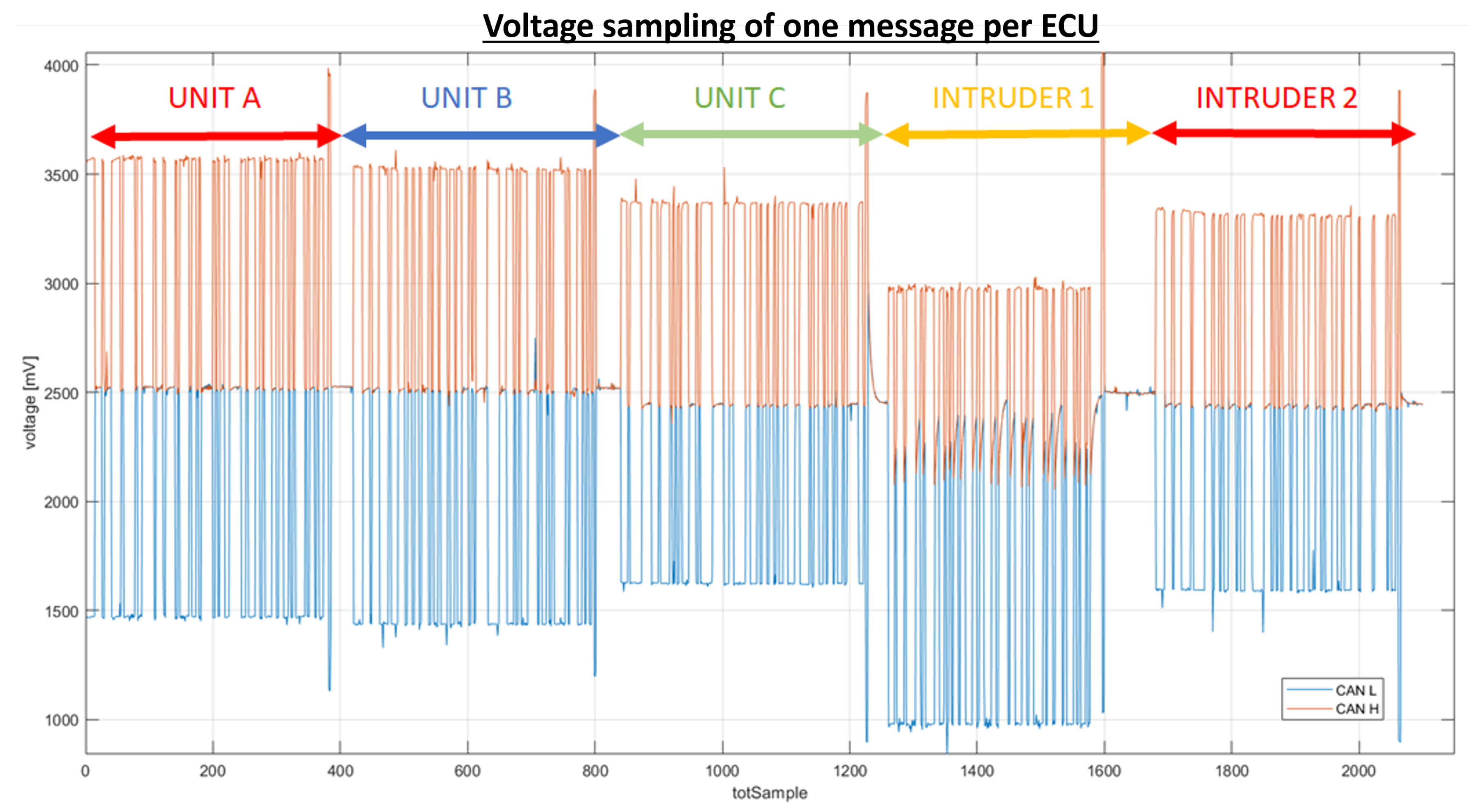
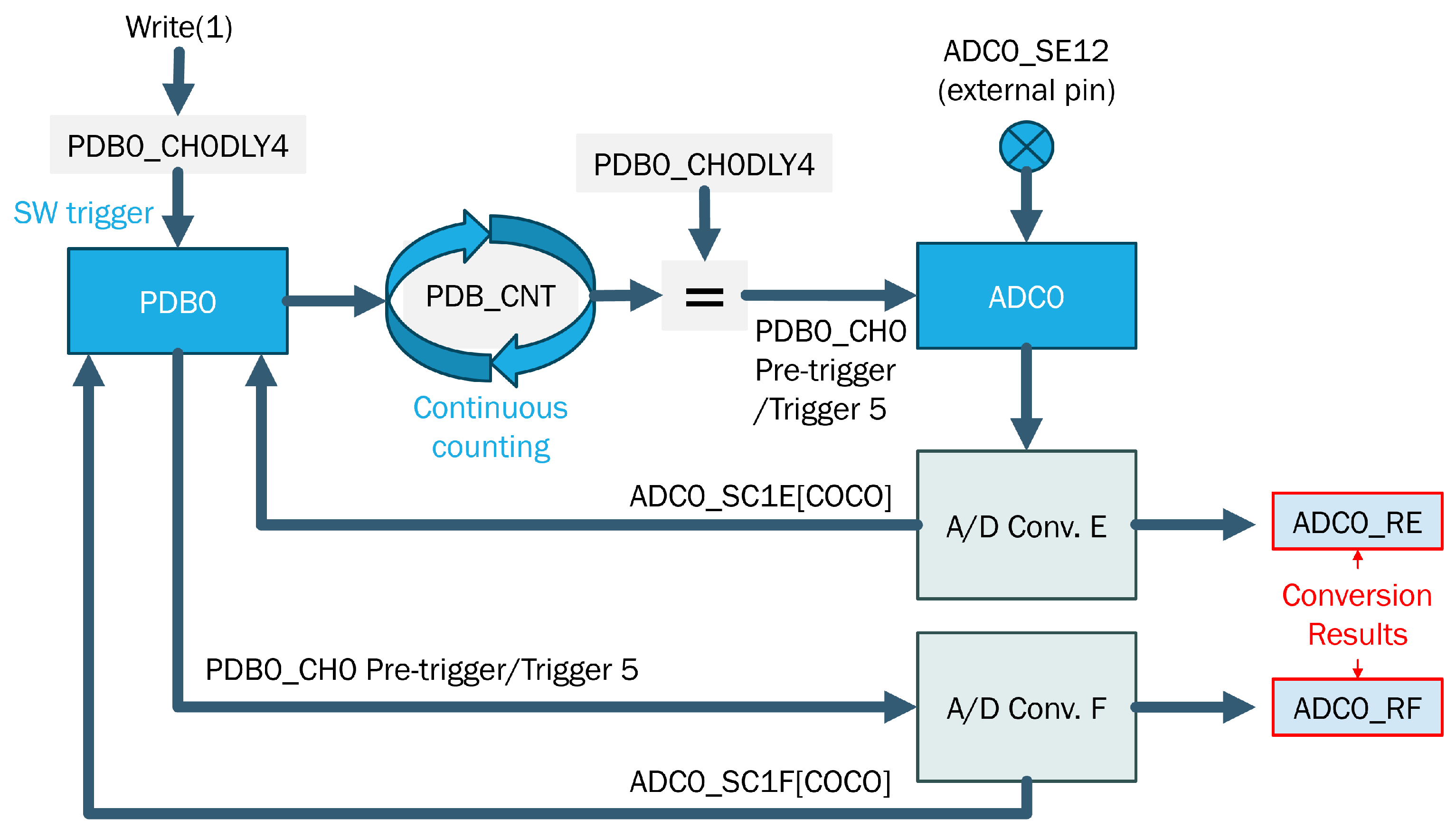
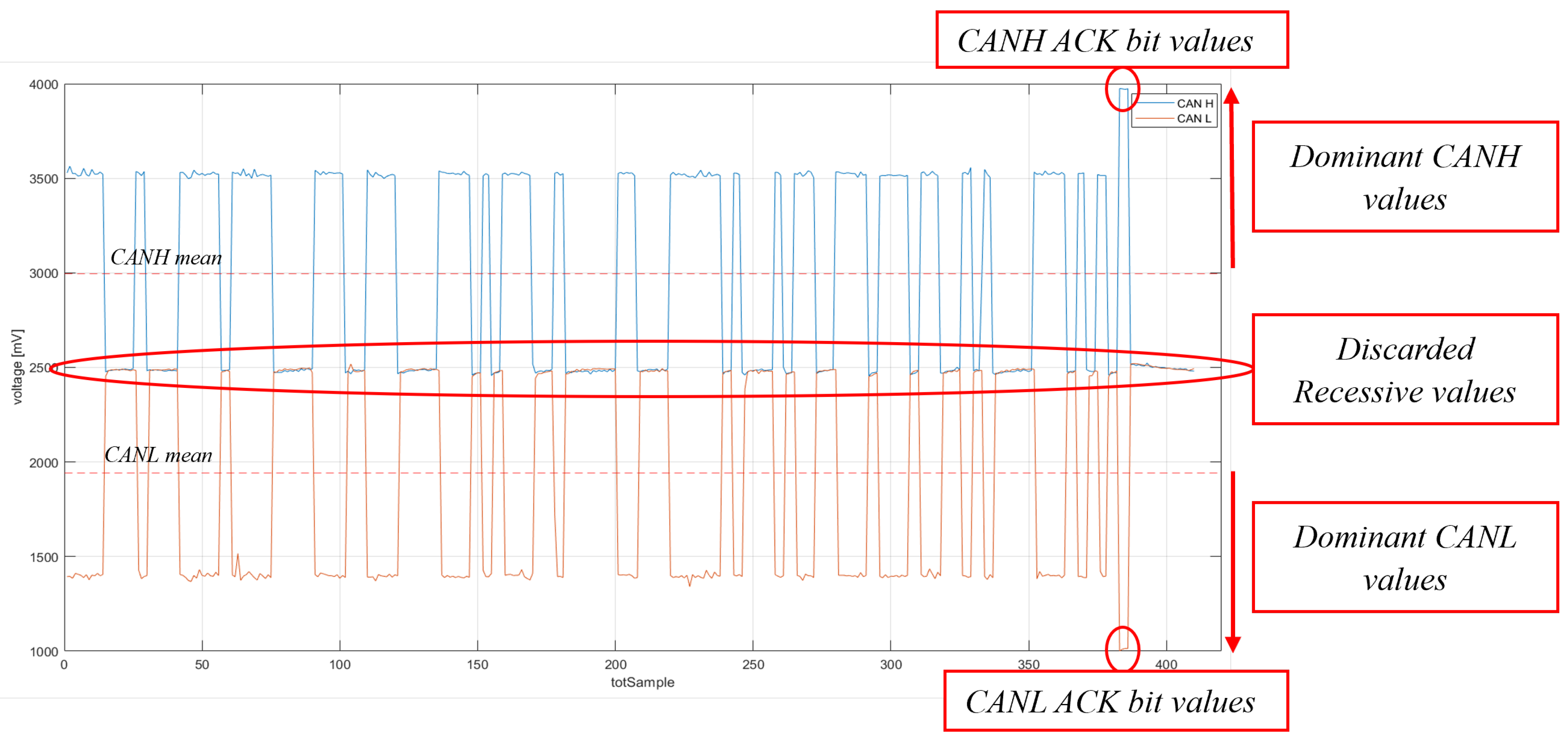
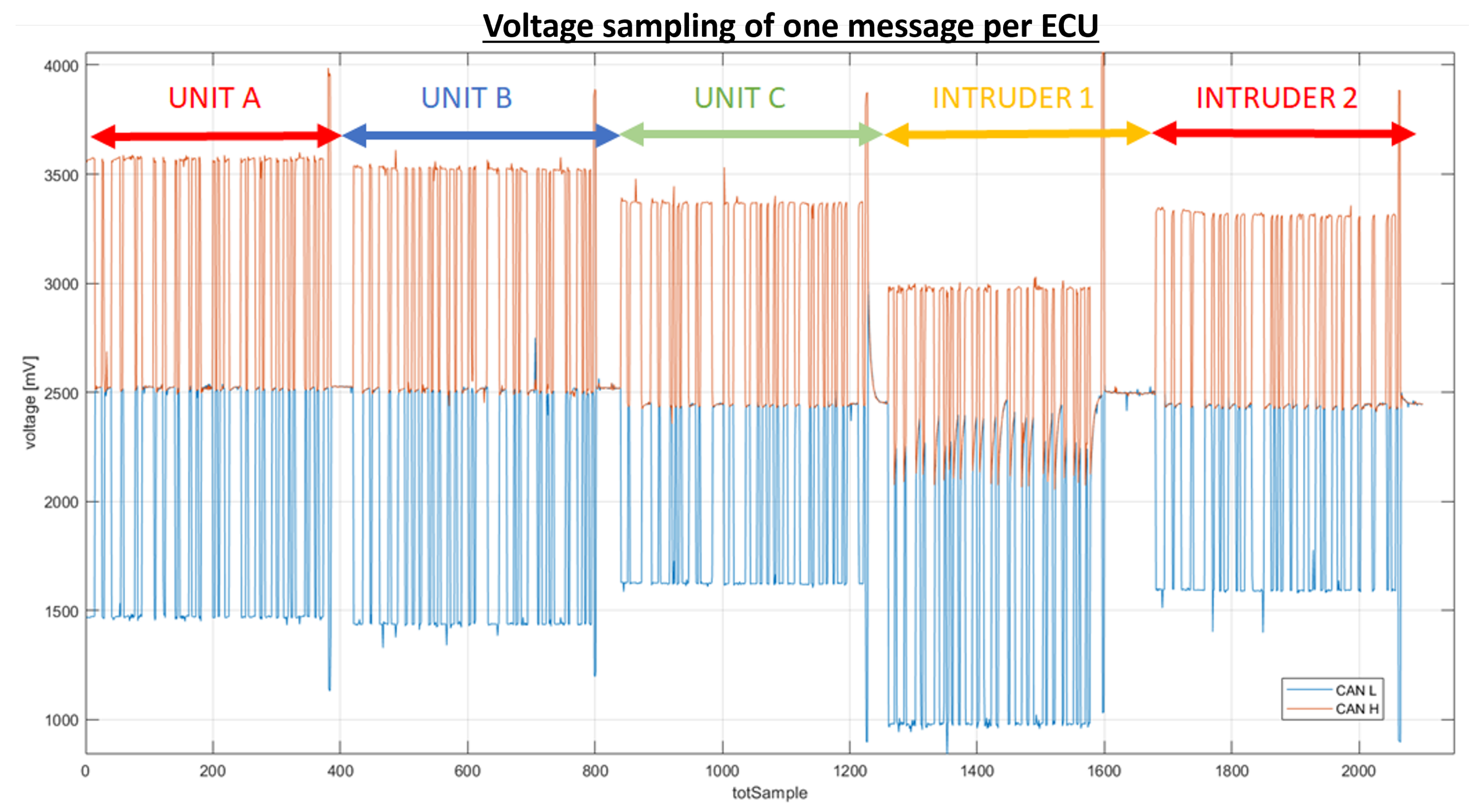
3.1. Voltage Sampling Method
- -
- Bit resolution = 12 bits
- -
- CAN rate = 125 Kbit/s
- -
- Bit number for message = 110 bits
- -
- PDB Period = 2.15 s
- (1)
- One message time:
- –
- One message time = (Bit number per message)/(Can bus velocity)
- –
- One message time = 110 bits/(125 Kbit/s) = 880 s
- (2)
- Number of samples per each message:
- –
- Number of samples per each message = (One message time)/(PDB period)
- –
- Number of samples per each message = 880 s/2.15 s ≅ 410 samples
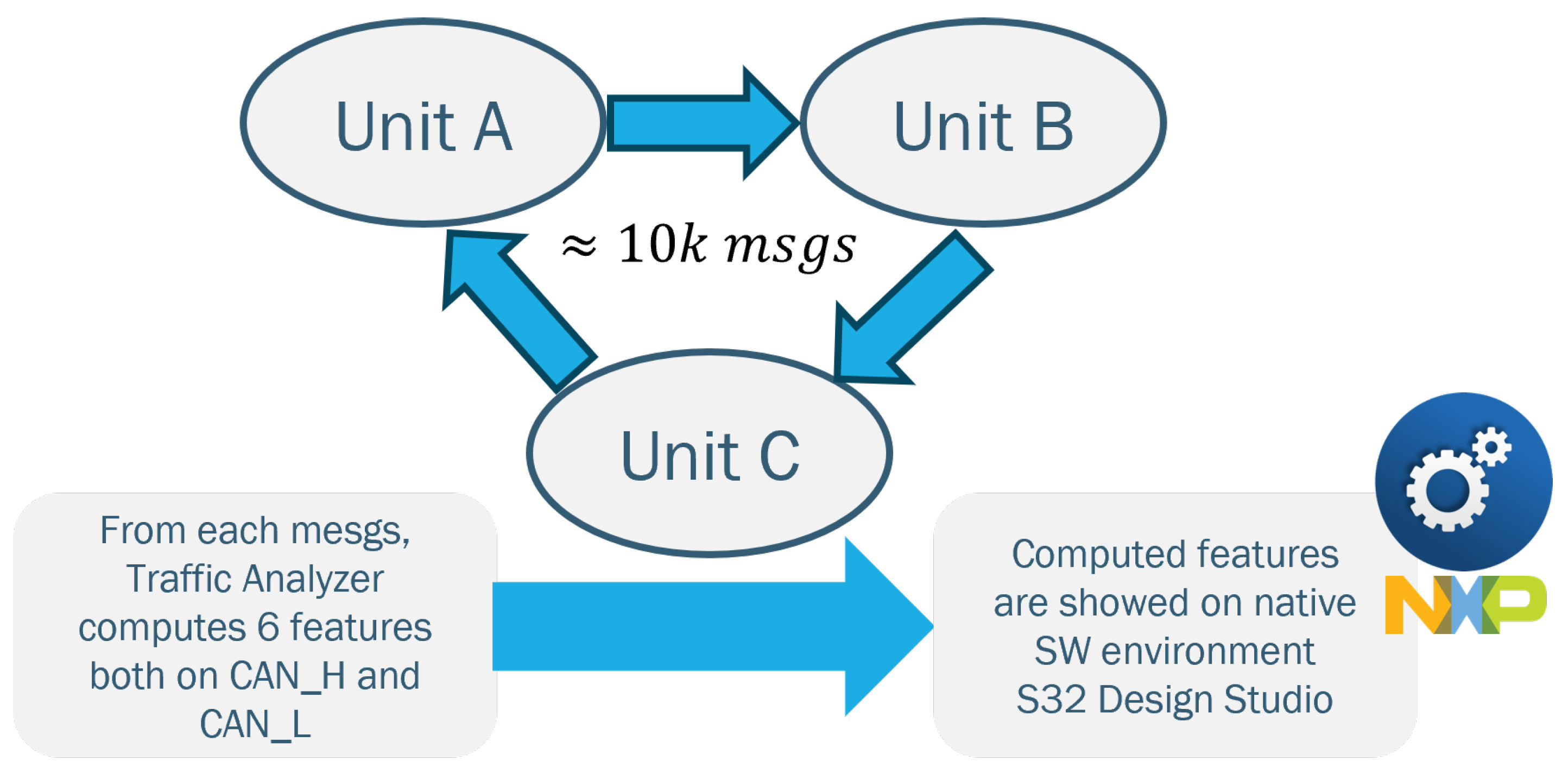
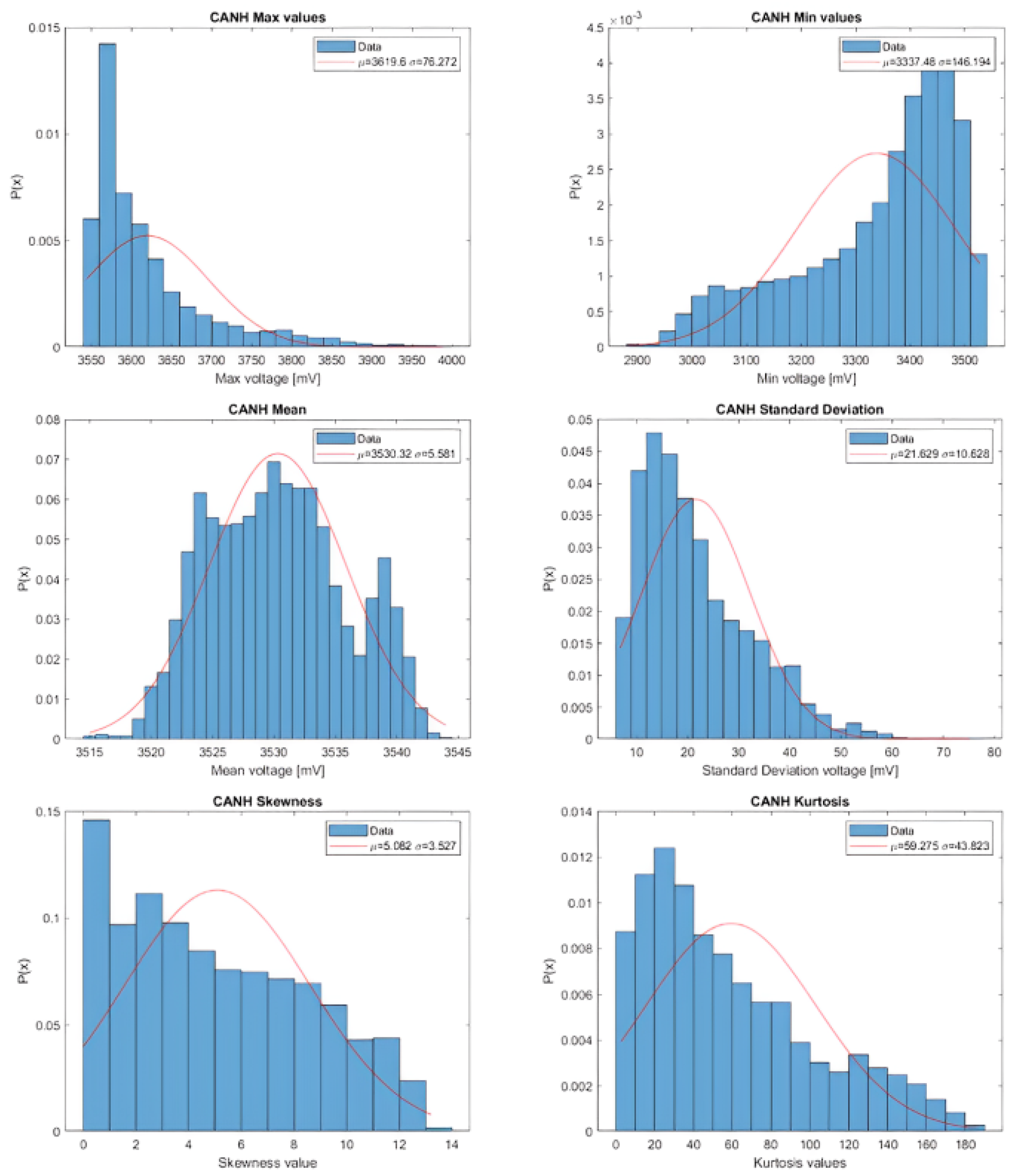
3.2. Features Extraction
3.3. Features Scaling
3.4. Neural Network
- Learning Algorithm: The learning algorithm selected for classification is a Supervised Learning Algorithm. In particular, Gradient Descent is a common technique that is used to optimize the weights of the neural network during the training process. This algorithm can be implemented using several variations, including Stochastic Gradient Descent (SGD), which uses a random sample to calculate the weight update, and Adaptive Gradient Algorithm (adagrad), which adapts the learning rate for each parameter of the network. The calculation of stochastic gradient descent occurs according to Equation (2):where represents the weights of the network at time t, is the learning rate, and indicates the gradient of the cost function Q with respect to the weights .
- Activation Function: The Rectified Linear Unit (ReLU) activation function was chosen, defined as . ReLU is one of the most widely used activation functions for hidden layers of neural networks. Its simplicity of implementation and compatibility with TensorFlow Lite makes it a practical choice.
- Model Type: The type of neural network model adopted here is a Feed-Forward network. In this type of model, connections exist only between successive levels, avoiding interconnections between neurons of the same level.
- Optimization Algorithm: The Adam optimization algorithm, derived from adaptive moment estimation, was selected. Adam is an extension of Stochastic Gradient Descent (SGD), which combines first-order and second-order information to update weights efficiently, and with an adaptive learning rate. The weight update rule in Adam is defined with the set of recursive equations in Equation (3):where and represent the moment and second moments of the gradient at time t, respectively; and , , and are hyper-parameters of the model.
- Output Function: For the output layer of the neural network, the Softmax function was chosen and it is defined as reported in Equation (4).where represents the function input and K is the total number of classes. Softmax is a mathematical function that transforms a vector of numerical values into a vector of probabilities. Each probability in the output vector corresponds to the relative scale of the corresponding input value.
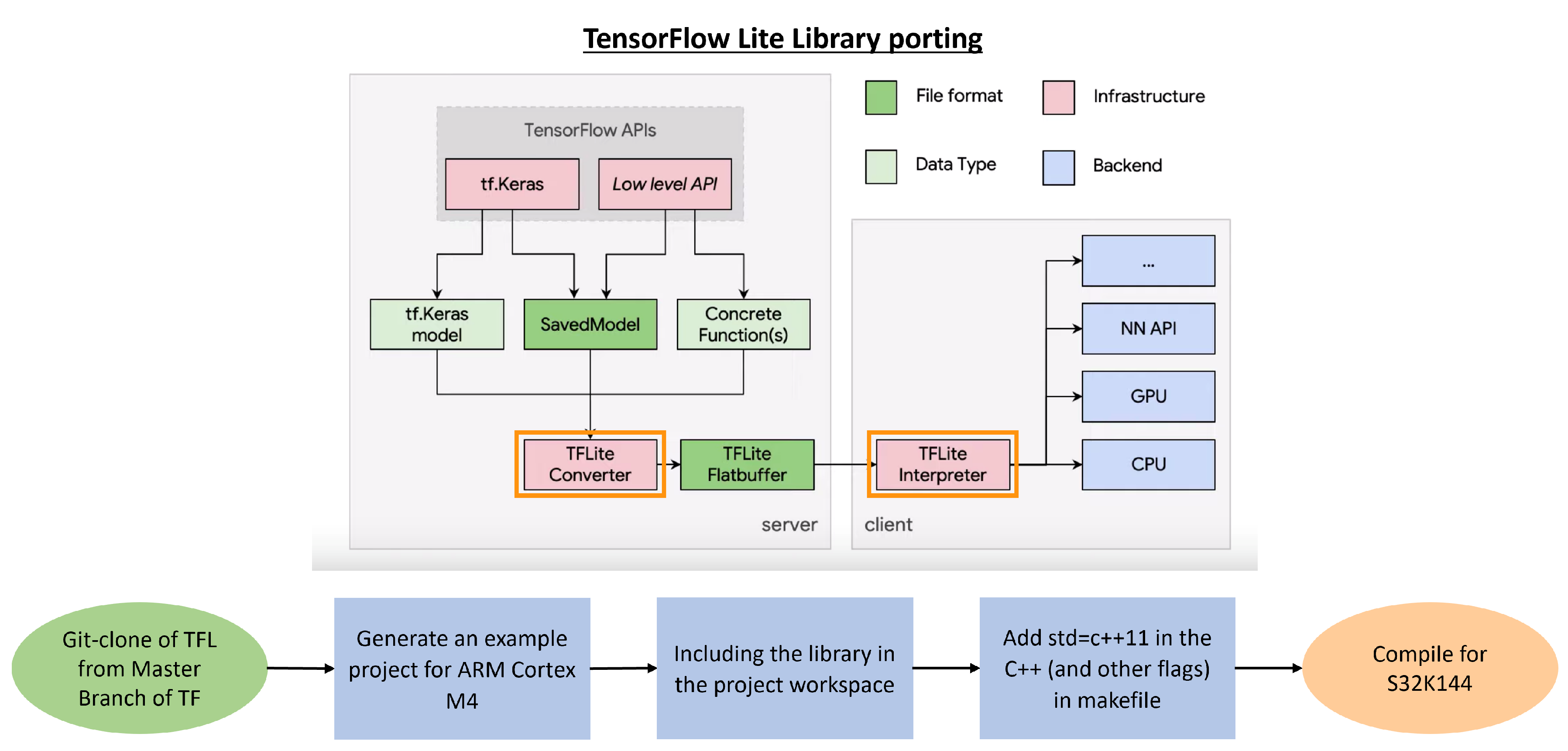
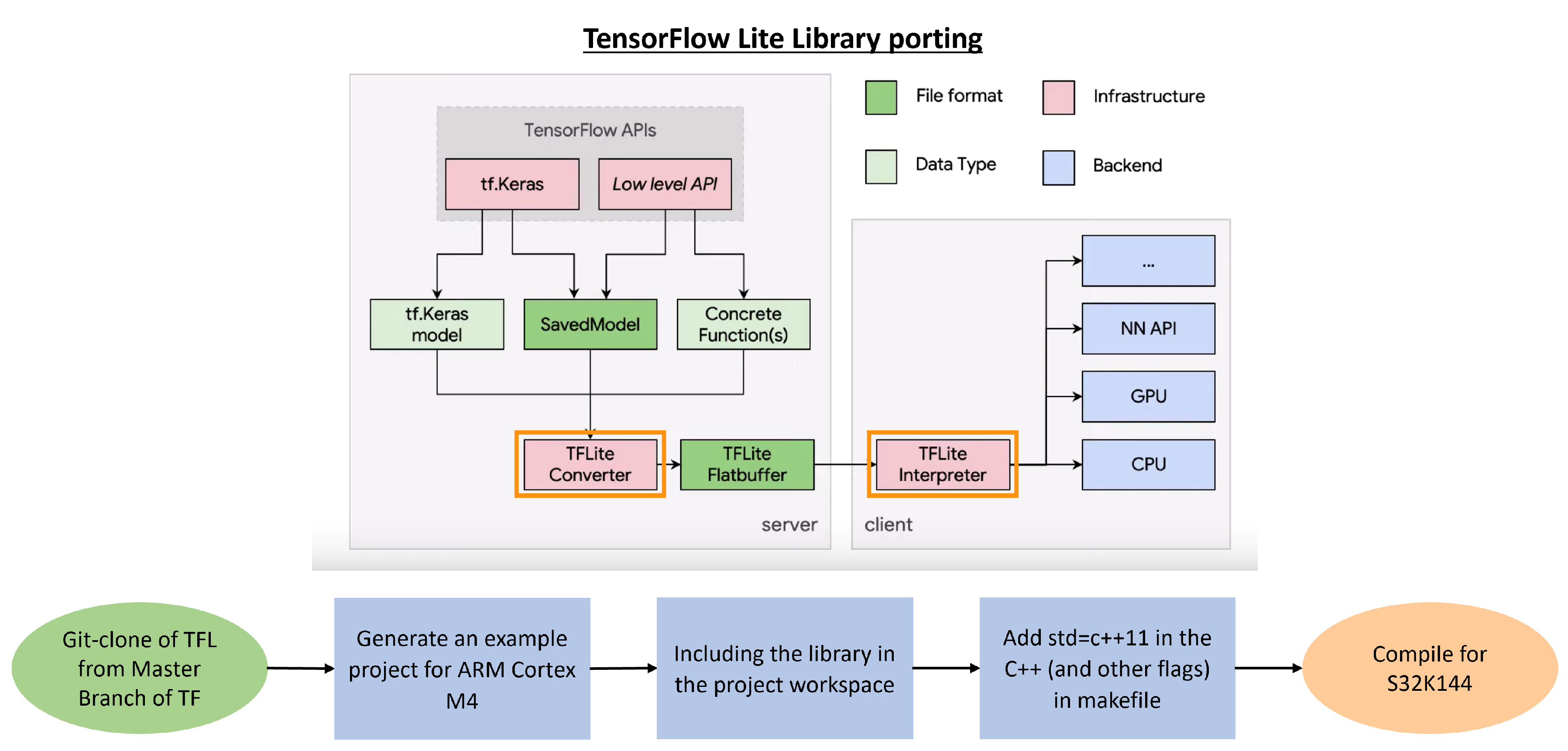
3.5. TensorFlow Lite for Embedded Integration
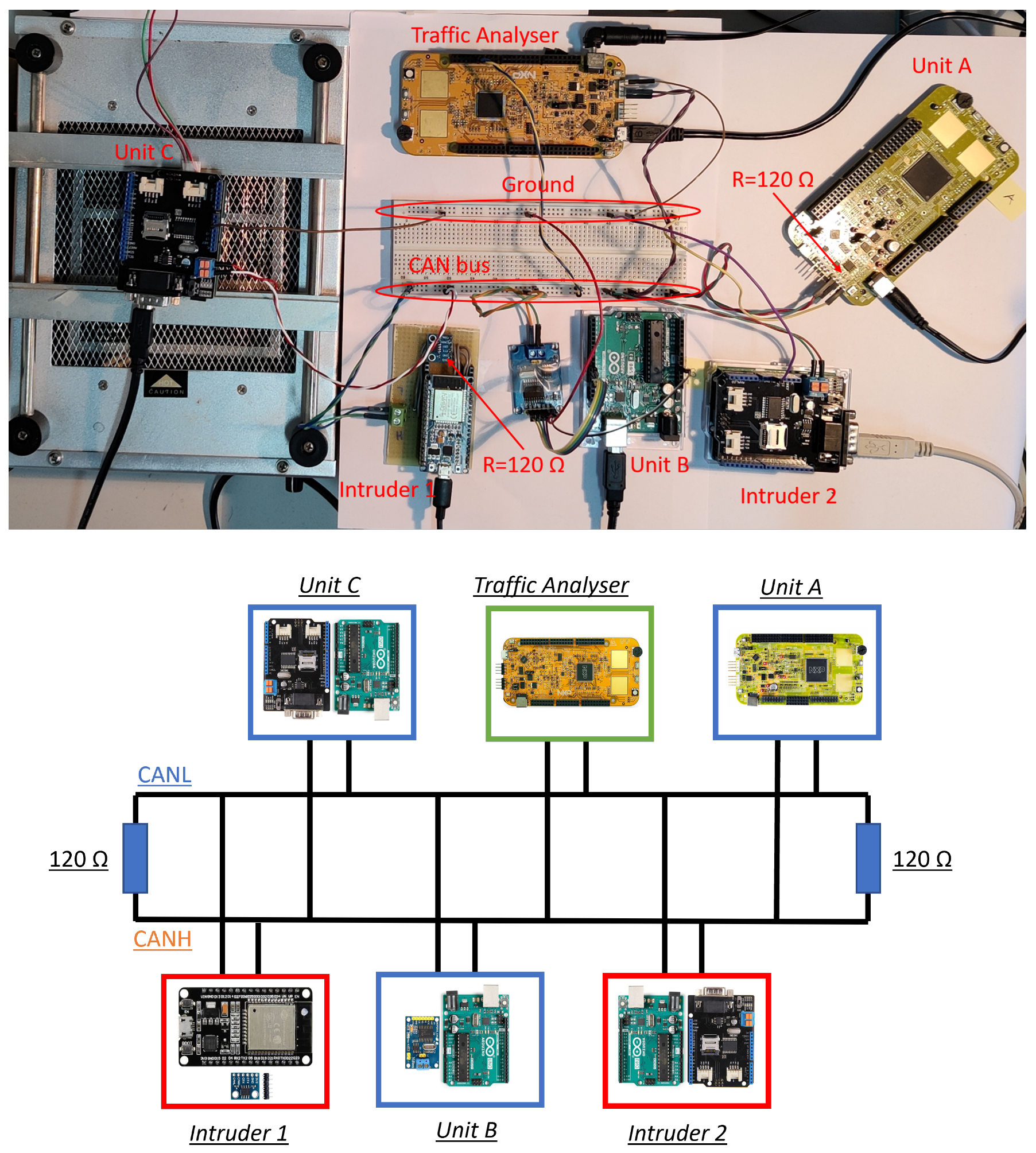
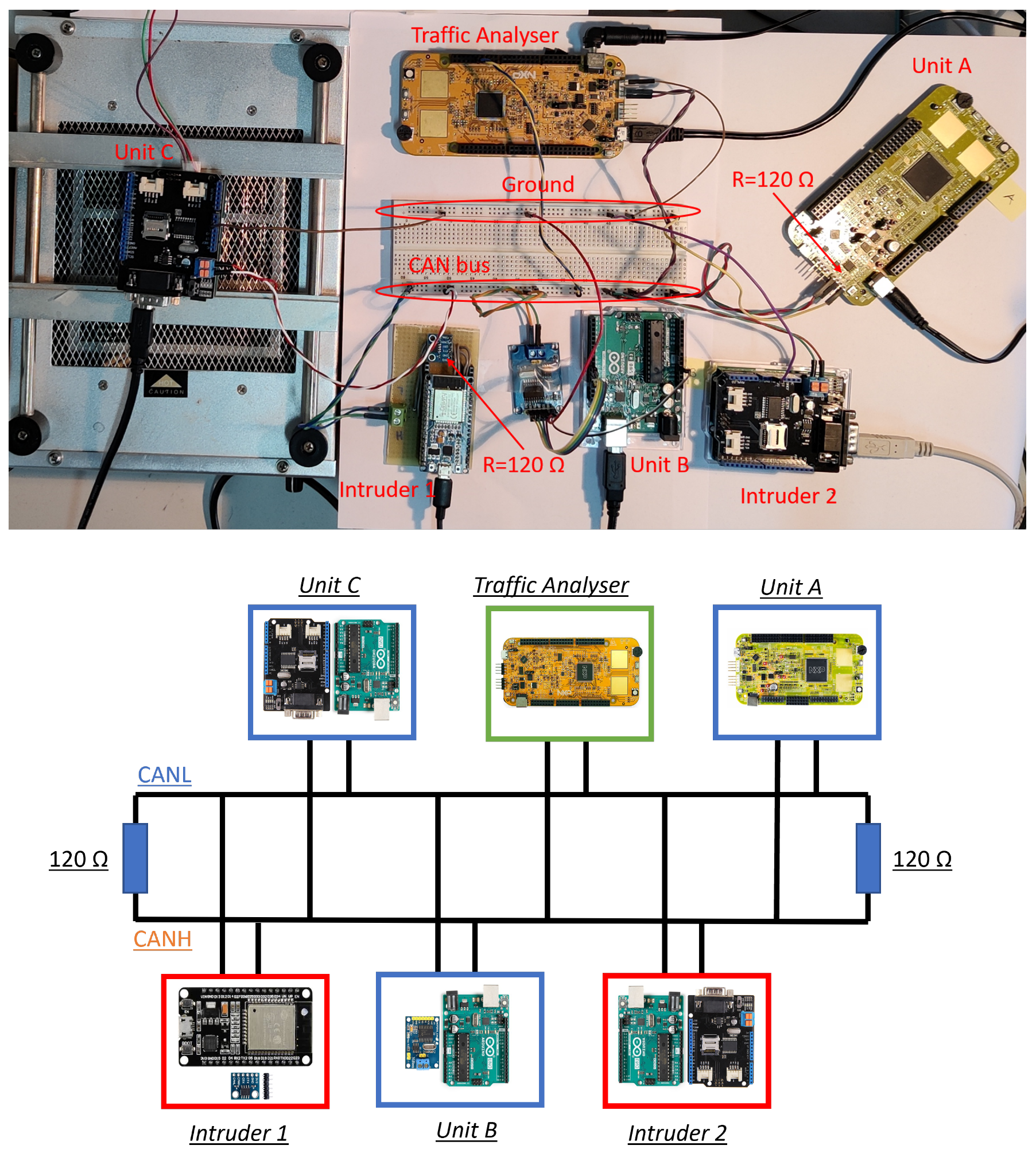
4. Experimental Validation
4.1. Anomaly Detection Strategy
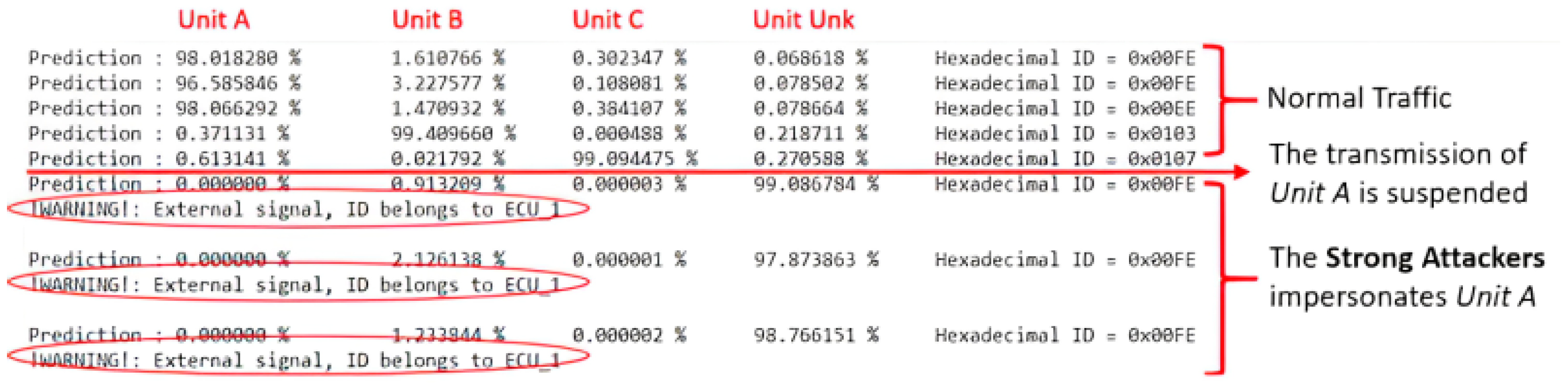
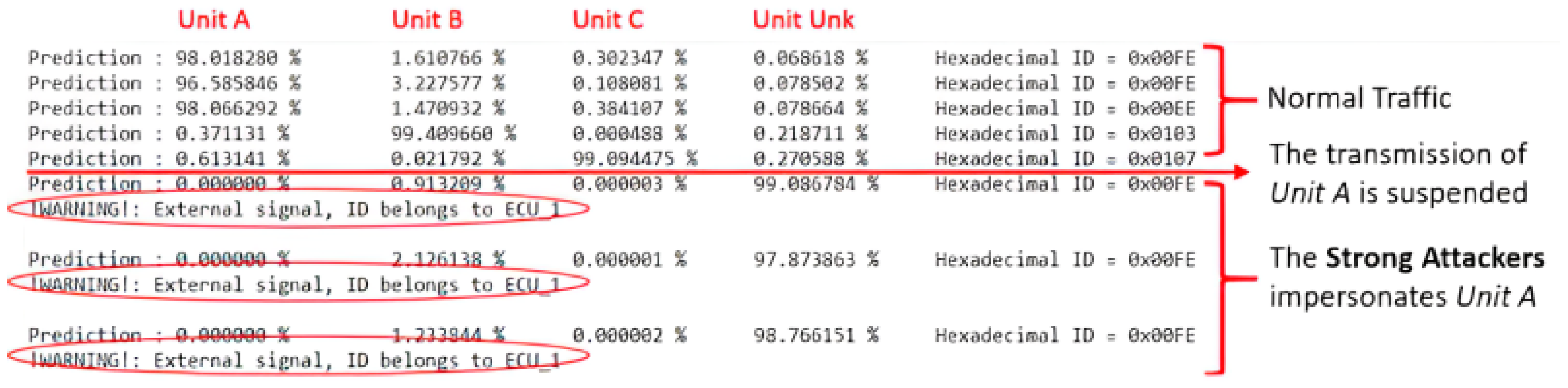
- External Signal with an Internal ID: In this situation, the algorithm classifies the incoming message as originating from an unknown unit. Remarkably, the message ID aligns with one of those previously loaded onto the ID map. This occurrence suggests a potential external intrusion into the system, as the message source is not recognized as any of the legitimate internal units.
- External Signal with an External ID: When the algorithm categorizes the message as belonging to an unknown unit, it further scrutinizes the message ID. In the event that the message ID does not correspond to any of the IDs pre-loaded on the ID map, this anomaly is recognized. Such a situation implies the presence of an unauthorized, external source that is trying to communicate with the system.
- Internal Signal with a Stolen ID: If the algorithm identifies a message as belonging to Unit A, Unit B, or Unit C, and the message ID aligns with one of the IDs available on the ID map, an additional layer of scrutiny is applied. In the case where the source of the message does not match the expected unit, the algorithm flags this as an anomaly. It suggests that an internal but unauthorized unit may be attempting to impersonate a legitimate one.
- Internal Signal with an External ID: Whenever the algorithm classifies a message as being associated with Unit A, Unit B, or Unit C, it extends its examination to the message ID. If the message ID fails to correspond to any of the IDs pre-loaded on the ID map, the algorithm recognizes this as an anomaly. In such a scenario, it indicates that a message from an internal unit is being sent with an ID that is not recognized by the system, implying an irregularity in the communication protocol.
4.2. Attack Simulation
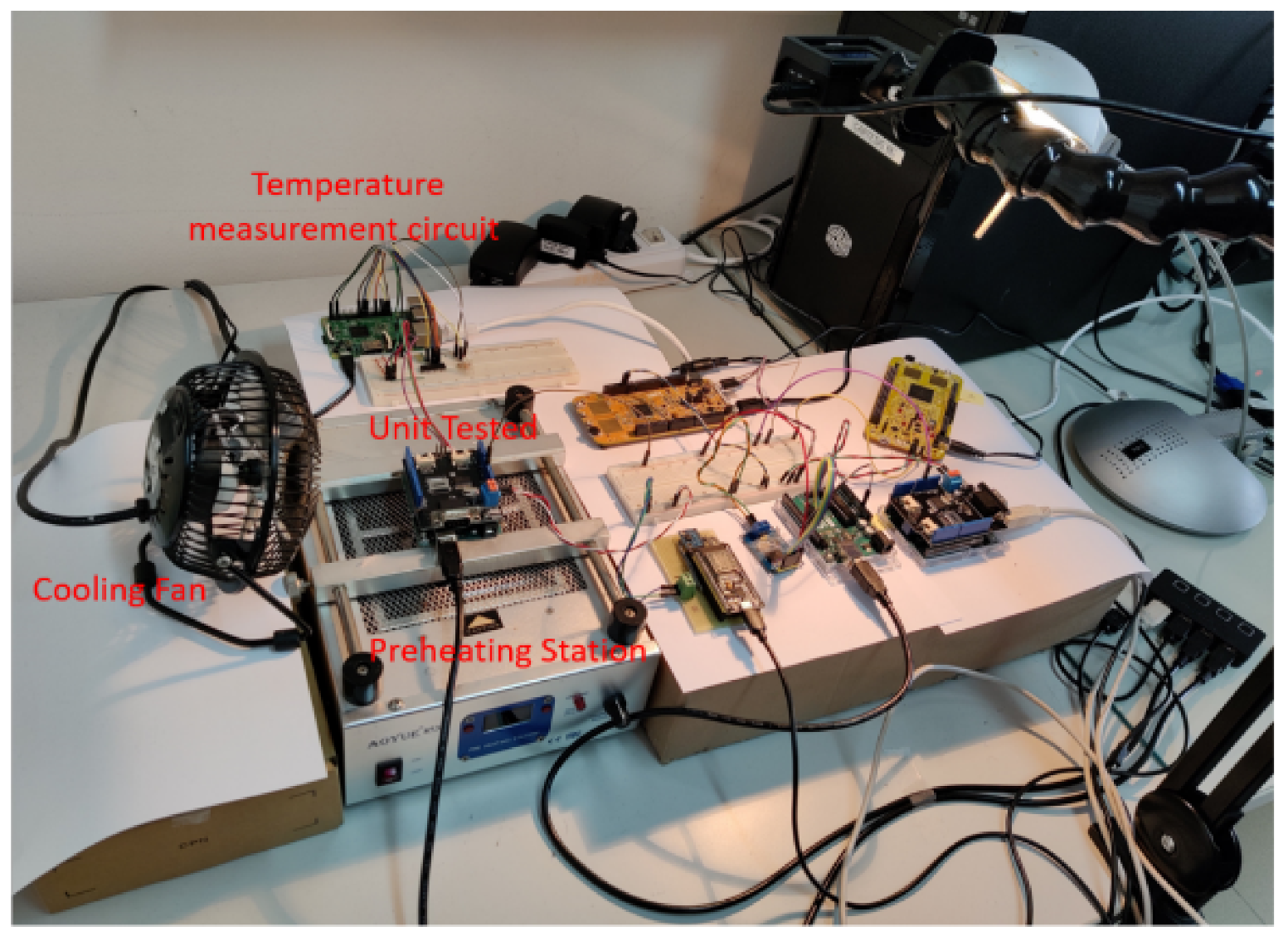
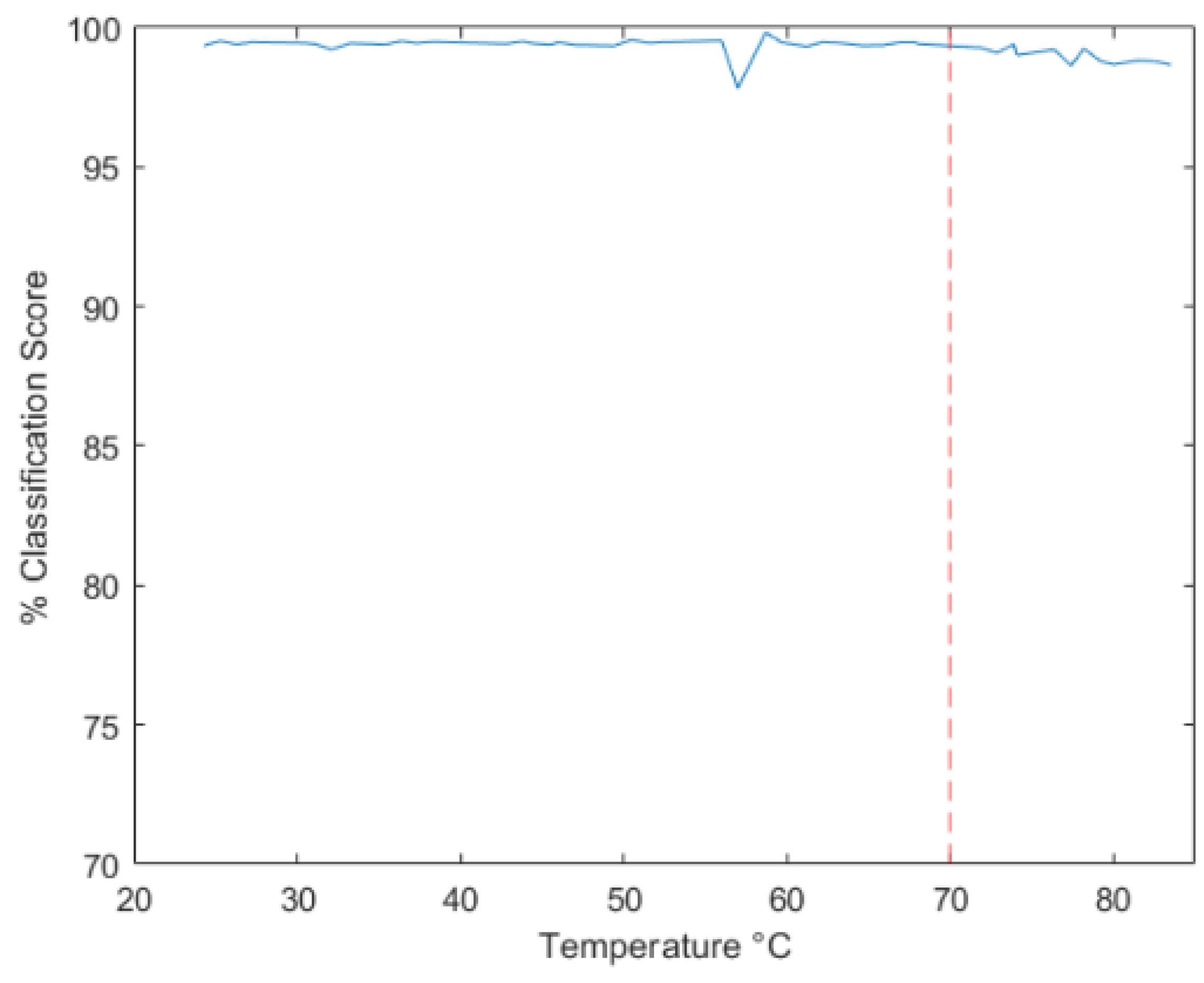
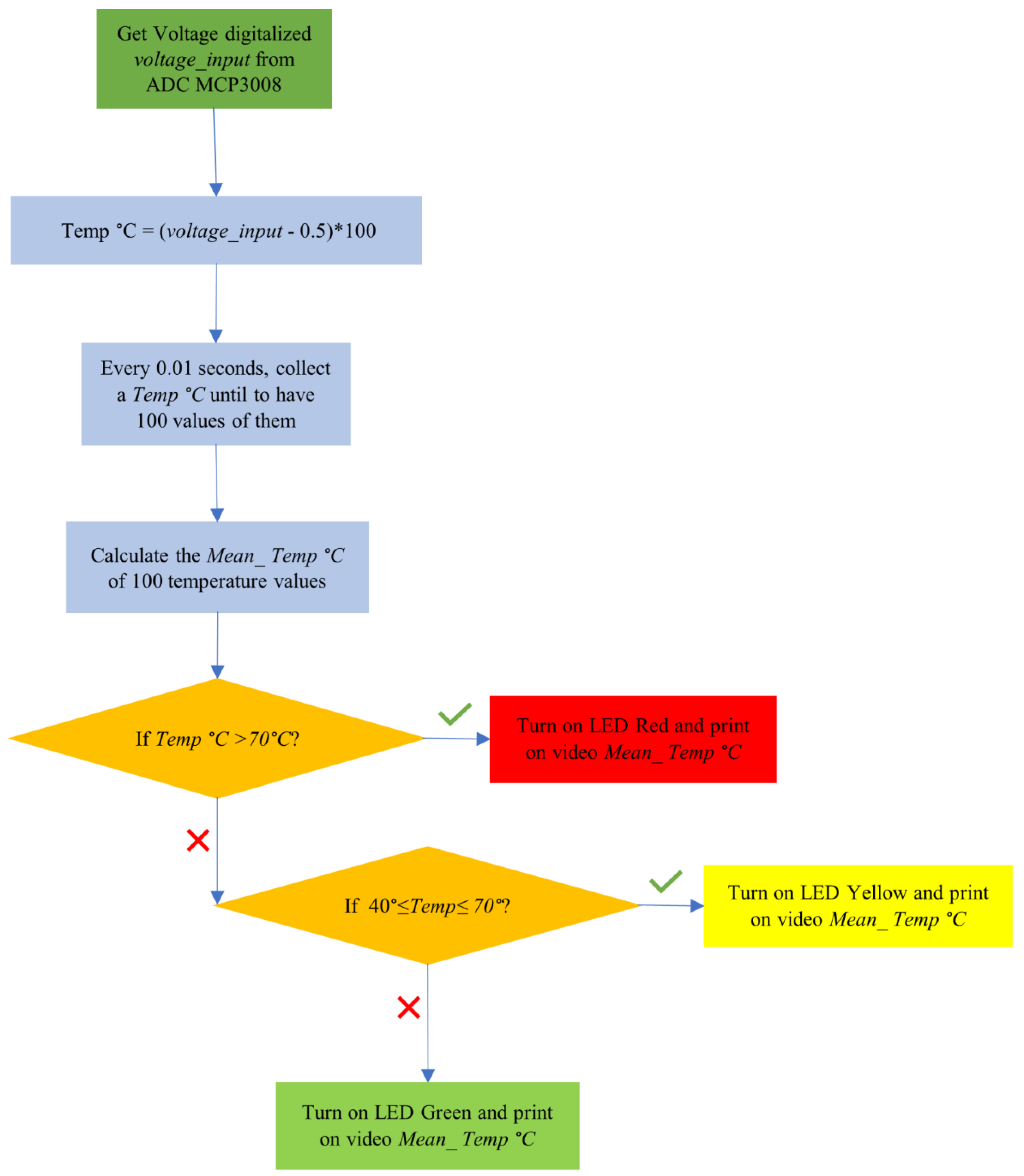
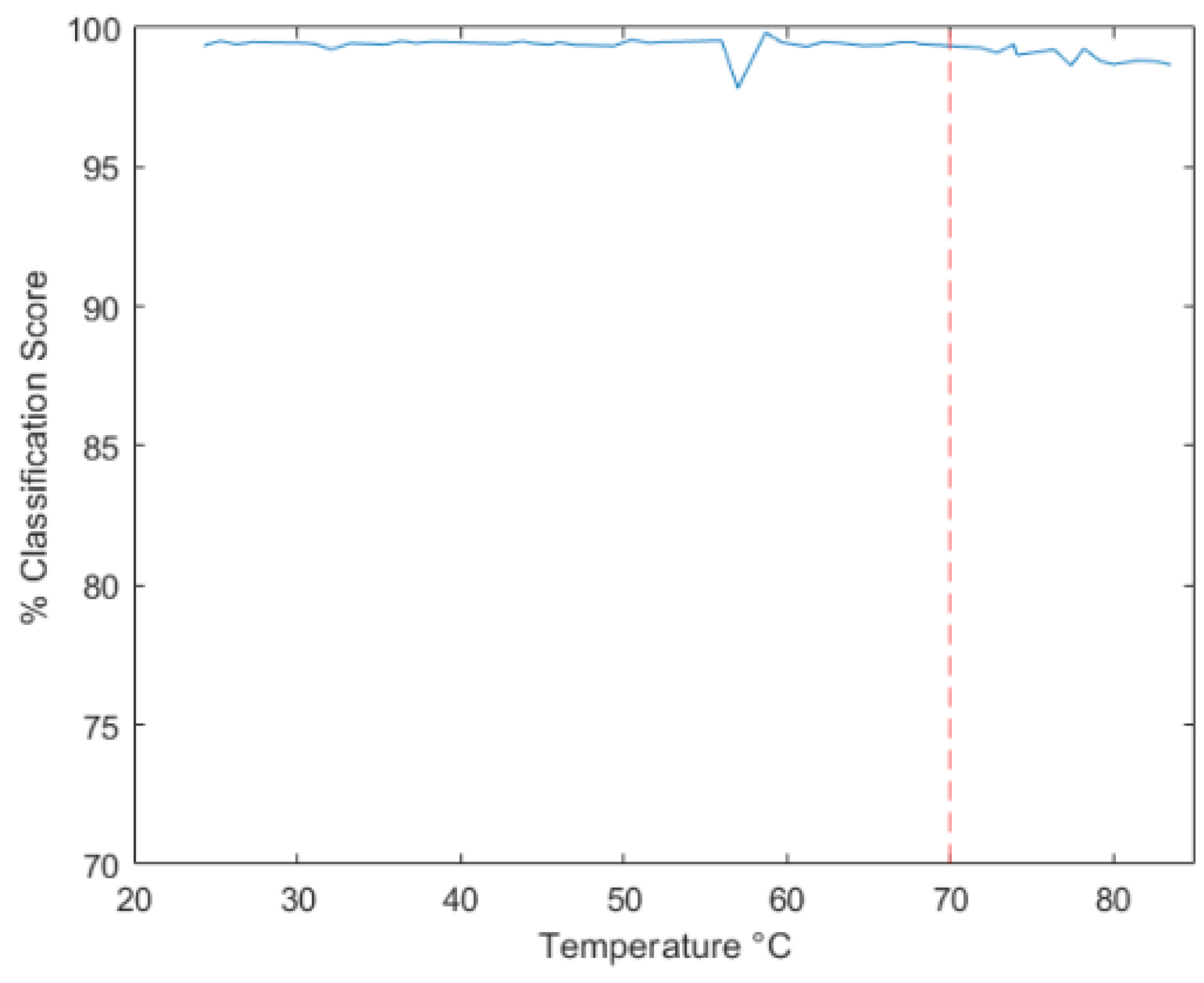
4.3. Thermal Test for Prediction Robustness
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rosadini, C.; Chiarelli, S.; Cornelio, A.; Nesci, W.; Saponara, S.; Dini, P.; Gagliardi, A. Method for Protection from Cyber Attacks to a Vehicle Based upon Time Analysis, and Corresponding Device. US Patent Application 18/163,488, April 2023. [Google Scholar]
- Rosadini, C.; Chiarelli, S.; Nesci, W.; Saponara, S.; Gagliardi, A.; Dini, P. Method for Protection from Cyber Attacks to a Vehicle Based Upon Time Analysis, and Corresponding Device. US Patent Application 17/929,370, November 2023. [Google Scholar]
- Dini, P.; Elhanashi, A.; Begni, A.; Saponara, S.; Zheng, Q.; Gasmi, K. Overview on Intrusion Detection Systems Design Exploiting Machine Learning for Networking Cybersecurity. Appl. Sci. 2023, 13, 7507. [Google Scholar] [CrossRef]
- Elhanashi, A.; Gasmi, K.; Begni, A.; Dini, P.; Zheng, Q.; Saponara, S. Machine Learning Techniques for Anomaly-Based Detection System on CSE-CIC-IDS2018 Dataset. In Proceedings of the International Conference on Applications in Electronics Pervading Industry, Environment and Society, Genova, Italy, 26–27 September 2022; pp. 131–140. [Google Scholar]
- Dini, P.; Begni, A.; Ciavarella, S.; De Paoli, E.; Fiorelli, G.; Silvestro, C.; Saponara, S. Design and Testing Novel One-Class Classifier Based on Polynomial Interpolation with Application to Networking Security. IEEE Access 2022, 10, 67910–67924. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S.; Colicelli, A. Overview on Battery Charging Systems for Electric Vehicles. Electronics 2023, 12, 4295. [Google Scholar] [CrossRef]
- Pacini, F.; Di Matteo, S.; Dini, P.; Fanucci, L.; Bucchi, F. Innovative Plug-and-Play System for Electrification of Wheel-Chairs. IEEE Access 2023, 11, 89038–89051. [Google Scholar] [CrossRef]
- Begni, A.; Dini, P.; Saponara, S. Design and Test of an LSTM-Based Algorithm for Li-Ion Batteries Remaining Useful Life Estimation. In Proceedings of the International Conference on Applications in Electronics Pervading Industry, Environment and Society, Genova, Italy, 26–27 September 2022; pp. 373–379. [Google Scholar]
- Dini, P.; Saponara, S.; Chakraborty, S.; Hosseinabadi, F.; Hegazy, O. Experimental Characterization & Electro-Thermal Modeling of Double Side Cooled SiC MOSFETs for Accurate and Rapid Power Converter Simulations. IEEE Access 2023, 11, 79120–79143. [Google Scholar]
- Bernardeschi, C.; Dini, P.; Domenici, A.; Palmieri, M.; Saponara, S. Do-it-Yourself FMU Generation. In Proceedings of the International Conference on Software Engineering and Formal Methods, Berlin, Germany, 26–30 September 2022; pp. 210–227. [Google Scholar]
- Pierpaolo, D.; Saponara, S. Control system design for cogging torque reduction based on sensor-less architecture. In Proceedings of the Applications in Electronics Pervading Industry, Environment and Society: APPLEPIES 2019 7, Pisa, Italy, 19–20 November 2020; pp. 309–321. [Google Scholar]
- Dini, P.; Saponara, S. Review on model based design of advanced control algorithms for cogging torque reduction in power drive systems. Energies 2022, 15, 8990. [Google Scholar] [CrossRef]
- Dini, P.; Ariaudo, G.; Botto, G.; Greca, F.L.; Saponara, S. Real-time electro-thermal modelling & predictive control design of resonant power converter in full electric vehicle applications. IET Power Electron. 2023, 16, 2045–2064. [Google Scholar]
- Bernardeschi, C.; Dini, P.; Domenici, A.; Saponara, S. Co-simulation and Verification of a Non-linear Control System for Cogging Torque Reduction in Brushless Motors. In Proceedings of the Software Engineering and Formal Methods: SEFM 2019 Collocated Workshops: CoSim-CPS, ASYDE, CIFMA, and FOCLASA, Oslo, Norway, 16–20 September 2019; pp. 3–19. [Google Scholar]
- Bernardeschi, C.; Dini, P.; Domenici, A.; Mouhagir, A.; Palmieri, M.; Saponara, S.; Sassolas, T.; Zaourar, L. Co-simulation of a model predictive control system for automotive applications. In Proceedings of the International Conference on Software Engineering and Formal Methods, Online, 6–10 November 2023; pp. 204–220. [Google Scholar]
- Benedetti, D.; Agnelli, J.; Gagliardi, A.; Dini, P.; Saponara, S. Design of a Digital Dashboard on Low-Cost Embedded Platform in a Fully Electric Vehicle. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC / ICPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Cosimi, F.; Dini, P.; Giannetti, S.; Petrelli, M.; Saponara, S. Analysis and design of a non-linear MPC algorithm for vehicle trajectory tracking and obstacle avoidance. In Applications in Electronics Pervading Industry, Environment and Society: APPLEPIES 2020; Springer: Berlin/Heidelberg, Germany, 2021; pp. 229–234. [Google Scholar]
- Miller, C.; Valasek, C. A survey of remote automotive attack surfaces. Black Hat USA 2014, 2014, 94. [Google Scholar]
- Wolf, M.; Weimerskirch, A.; Wollinger, T. State of the art: Embedding security in vehicles. EURASIP J. Embed. Syst. 2007, 2007, 74706. [Google Scholar] [CrossRef]
- Miller, C.; Valasek, C. Remote exploitation of an unaltered passenger vehicle. Black Hat USA 2015, 2015, 1–91. [Google Scholar]
- Voss, W. Error Detection and Fault Confinement. A Comprehensible Guide to Controller Area Network, 2nd ed.; Copperhill Media Corporation: Greenfield, MA, USA, 2008; pp. 117–122. [Google Scholar]
- Zhang, H.; Meng, X.; Zhang, X.; Liu, Z. CANsec: A practical in-vehicle controller area network security evaluation tool. Sensors 2020, 20, 4900. [Google Scholar] [CrossRef] [PubMed]
- Kleberger, P.; Olovsson, T.; Jonsson, E. Security aspects of the in-vehicle network in the connected car. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 528–533. [Google Scholar]
- Wang, Q.; Sawhney, S. VeCure: A practical security framework to protect the CAN bus of vehicles. In Proceedings of the 2014 International Conference on the Internet of Things (IOT), Cambridge, MA, USA, 6–8 October 2014; pp. 13–18. [Google Scholar]
- Cui, X.; Liu, S.; Lin, Z.; Ma, J.; Wen, F.; Ding, Y.; Yang, L.; Guo, W.; Feng, X. Two-Step Electricity Theft Detection Strategy Considering Economic Return Based on Convolutional Autoencoder and Improved Regression Algorithm. IEEE Trans. Power Syst. 2022, 37, 2346–2359. [Google Scholar] [CrossRef]
- Li, X.; Ma, J.; Zhao, X.; Wang, L. Intelligent Two-Step Estimation Approach for Vehicle Mass and Road Grade. IEEE Access 2020, 8, 218853–218862. [Google Scholar] [CrossRef]
- Feng, Y.; Cao, Y.; Yang, S.; Yang, L.; Wei, T. A two-step sub-optimal algorithm for bus evacuation planning. Oper. Res. 2023, 23, 36. [Google Scholar] [CrossRef]
- Liang, J.; Wu, J.; Gao, Z.; Sun, H.; Yang, X.; Lo, H.K. Bus transit network design with uncertainties on the basis of a metro network: A two-step model framework. Transp. Res. Part B Methodol. 2019, 126, 115–138. [Google Scholar] [CrossRef]
- Lombardi, M.; Pascale, F.; Santaniello, D. Two-step algorithm to detect cyber-attack over the can-bus: A preliminary case study in connected vehicles. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part B Mech. Eng. 2022, 8, 031105. [Google Scholar] [CrossRef]
- Dong, C.; Wu, H.; Li, Q. Multiple Observation HMM-Based CAN Bus Intrusion Detection System for In-Vehicle Network. IEEE Access 2023, 11, 35639–35648. [Google Scholar] [CrossRef]
- Bari, B.S.; Yelamarthi, K.; Ghafoor, S. Intrusion Detection in Vehicle Controller Area Network (CAN) Bus Using Machine Learning: A Comparative Performance Study. Sensors 2023, 23, 3610. [Google Scholar] [CrossRef]
- Khan, J.; Lim, D.W.; Kim, Y.S. Intrusion Detection System CAN-Bus In-Vehicle Networks Based on the Statistical Characteristics of Attacks. Sensors 2023, 23, 3554. [Google Scholar] [CrossRef]
- Rajapaksha, S.; Kalutarage, H.; Al-Kadri, M.O.; Madzudzo, G.; Petrovski, A.V. Keep the Moving Vehicle Secure: Context-Aware Intrusion Detection System for In-Vehicle CAN Bus Security. In Proceedings of the 2022 14th International Conference on Cyber Conflict: Keep Moving! (CyCon), Tallinn, Estonia, 31 May–3 June 2022; Volume 700, pp. 309–330. [Google Scholar] [CrossRef]
- Jichici, C.; Groza, B.; Ragobete, R.; Murvay, P.S.; Andreica, T. Effective Intrusion Detection and Prevention for the Commercial Vehicle SAE J1939 CAN Bus. IEEE Trans. Intell. Transp. Syst. 2022, 23, 17425–17439. [Google Scholar] [CrossRef]
- Alfardus, A.; Rawat, D.B. Intrusion Detection System for CAN Bus In-Vehicle Network based on Machine Learning Algorithms. In Proceedings of the 2021 IEEE 12th Annual Ubiquitous Computing, Electronics and Mobile Communication Conference (UEMCON), New York, NY, USA, 1–4 December 2021; pp. 0944–0949. [Google Scholar] [CrossRef]
- Jin, S.; Chung, J.G.; Xu, Y. Signature-Based Intrusion Detection System (IDS) for In-Vehicle CAN Bus Network. In Proceedings of the 2021 IEEE International Symposium on Circuits and Systems (ISCAS), Daegu, Republic of Korea, 22–28 May 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Delwar Hossain, M.; Inoue, H.; Ochiai, H.; Fall, D.; Kadobayashi, Y. An Effective In-Vehicle CAN Bus Intrusion Detection System Using CNN Deep Learning Approach. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Hossain, M.D.; Inoue, H.; Ochiai, H.; Fall, D.; Kadobayashi, Y. LSTM-Based Intrusion Detection System for In-Vehicle Can Bus Communications. IEEE Access 2020, 8, 185489–185502. [Google Scholar] [CrossRef]
- Hanselmann, M.; Strauss, T.; Dormann, K.; Ulmer, H. CANet: An Unsupervised Intrusion Detection System for High Dimensional CAN Bus Data. IEEE Access 2020, 8, 58194–58205. [Google Scholar] [CrossRef]
- Casillo, M.; Coppola, S.; De Santo, M.; Pascale, F.; Santonicola, E. Embedded Intrusion Detection System for Detecting Attacks over CAN-BUS. In Proceedings of the 2019 4th International Conference on System Reliability and Safety (ICSRS), Rome, Italy, 20–22 November 2019; pp. 136–141. [Google Scholar] [CrossRef]
- Abbott-McCune, S.; Shay, L.A. Intrusion prevention system of automotive network CAN bus. In Proceedings of the 2016 IEEE International Carnahan Conference on Security Technology (ICCST), Orlando, FL, USA, 24–27 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Gmiden, M.; Gmiden, M.H.; Trabelsi, H. An intrusion detection method for securing in-vehicle CAN bus. In Proceedings of the 2016 17th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Sousse, Tunisia, 19–21 December 2016; pp. 176–180. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, A.; Sun, H.; Wang, B. Analysis of Recent Deep-Learning-Based Intrusion Detection Methods for In-Vehicle Network. IEEE Trans. Intell. Transp. Syst. 2023, 24, 1843–1854. [Google Scholar] [CrossRef]
- Tariq, S.; Lee, S.; Kim, H.K.; Woo, S.S. CAN-ADF: The controller area network attack detection framework. Comput. Secur. 2020, 94, 101857. [Google Scholar] [CrossRef]
- Gundu, R.; Maleki, M. Securing CAN Bus in Connected and Autonomous Vehicles Using Supervised Machine Learning Approaches. In Proceedings of the 2022 IEEE International Conference on Electro Information Technology (eIT), Mankato, MN, USA, 19–21 May 2022; pp. 042–046. [Google Scholar] [CrossRef]
- Salunkhe, S.S.; Pal, S.; Agrawal, A.; Rai, R.; Mole, S.S.; Jos, B.M. Energy optimization for CAN bus and media controls in electric vehicles using deep learning algorithms. J. Supercomput. 2022, 78, 8493–8508. [Google Scholar] [CrossRef]
- Abdennour, N.; Ouni, T.; Amor, N.B. Driver identification using only the CAN-Bus vehicle data through an RCN deep learning approach. Robot. Auton. Syst. 2021, 136, 103707. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, Z.; Li, F.; Xie, C.; Ren, T.; Chen, J.; Liu, L. A deep learning framework for driving behavior identification on in-vehicle CAN-BUS sensor data. Sensors 2019, 19, 1356. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.; Chen, C.; Xiao, F.; Avatefipour, O.; Alsubhi, K.; Yunianta, A. An Evolutionary Deep Learning Anomaly Detection Framework for In-Vehicle Networks-CAN Bus. IEEE Trans. Ind. Appl. 2020. [Google Scholar] [CrossRef]
- Refat, R.U.D.; Elkhail, A.A.; Hafeez, A.; Malik, H. Detecting can bus intrusion by applying machine learning method to graph based features. In Intelligent Systems and Applications: Proceedings of the 2021 Intelligent Systems Conference (IntelliSys); Springer: Berlin/Heidelberg, Germany, 2022; Volume 3, pp. 730–748. [Google Scholar]
- Lee, S.; Choi, W.; Jo, H.J.; Lee, D.H. ErrIDS: An Enhanced Cumulative Timing Error-Based Automotive Intrusion Detection System. IEEE Trans. Intell. Transp. Syst. 2023, 24, 12406–12421. [Google Scholar] [CrossRef]
- Lee, S.; Jo, H.J.; Cho, A.; Lee, D.H.; Choi, W. TTIDS: Transmission-Resuming Time-Based Intrusion Detection System for Controller Area Network (CAN). IEEE Access 2022, 10, 52139–52153. [Google Scholar] [CrossRef]
- Zhao, Y.; Xun, Y.; Liu, J. ClockIDS: A Real-Time Vehicle Intrusion Detection System Based on Clock Skew. IEEE Internet Things J. 2022, 9, 15593–15606. [Google Scholar] [CrossRef]
- Halder, S.; Conti, M.; Das, S.K. COIDS: A clock offset based intrusion detection system for controller area networks. In Proceedings of the 21st International Conference on Distributed Computing and Networking, Kolkata, India, 4–7 January 2020; pp. 1–10. [Google Scholar]
- Zhou, X.; Jiang, R.; Tian, M.; Qu, H.; Zhang, H. Temperature-sensitive fingerprinting on ECU clock offset for CAN intrusion detection and source identification. In Proceedings of the ACM Turing Celebration Conference, Hefei, China, 22–24 May 2020; pp. 89–94. [Google Scholar]
- Zhou, J.; Xie, G.; Yu, S.; Li, R. Clock-Based Sender Identification and Attack Detection for Automotive CAN Network. IEEE Access 2021, 9, 2665–2679. [Google Scholar] [CrossRef]
- Hu, X.; Hu, A.; Yu, J.; Ding, Y.; Hu, H.; Guo, P. Anti-counterfeiting Method of CAN Terminal Based on Device Physical Fingerprint. In Proceedings of the 2023 3rd International Conference on Consumer Electronics and Computer Engineering (ICCECE), Guangzhou, China, 6–8 January 2023; pp. 394–399. [Google Scholar] [CrossRef]
- Murvay, P.S.; Berdich, A.; Groza, B. Physical Layer Intrusion Detection and Localization on CAN Bus. In Machine Learning and Optimization Techniques for Automotive Cyber-Physical Systems; Springer: Berlin/Heidelberg, Germany, 2023; pp. 399–423. [Google Scholar]
- Mohan, J. An Integrated Approach to Securing In-Vehicle CAN Bus Network Using ECU Fingerprinting and Image Classification Techniques. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2023. [Google Scholar]
- Popa, L.; Groza, B.; Jichici, C.; Murvay, P.S. ECUPrint—Physical Fingerprinting Electronic Control Units on CAN Buses Inside Cars and SAE J1939 Compliant Vehicles. IEEE Trans. Inf. Forensics Secur. 2022, 17, 1185–1200. [Google Scholar] [CrossRef]
- Hafeez, A.; Rehman, K.; Malik, H. State of the Art Survey on Comparison of Physical Fingerprinting-Based Intrusion Detection Techniques for In-Vehicle Security; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2020. [Google Scholar]
- Tayyab, M. Authenticating the Sender on CAN Bus Using Inimitable Physical Characteristics of the Transmitter and Channel. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2018. [Google Scholar]
- Avatefipour, O. Physical-Fingerprinting of Electronic Control Unit (ECU) Based on Machine Learning Algorithm for In-Vehicle Network Communication Protocol CAN-BUS. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2017. [Google Scholar]
- Avatefipour, O.; Hafeez, A.; Tayyab, M.; Malik, H. Linking received packet to the transmitter through physical-fingerprinting of controller area network. In Proceedings of the 2017 IEEE Workshop on Information Forensics and Security (WIFS), Rennes, France, 4–7 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Fang, W.; Yu, J.; Ding, Y.; Hu, X.; Li, S.; Hu, A. Research on Terminal Fingerprint Extraction and Temperature Adaptability Based on CAN Bus. In Proceedings of the 2022 IEEE 22nd International Conference on Communication Technology (ICCT), Nanjing, China, 11–14 November 2022; pp. 1506–1511. [Google Scholar] [CrossRef]
- Verma, K.; Girdhar, M.; Hafeez, A.; Awad, S.S. ECU Identification using Neural Network Classification and Hyperparameter Tuning. In Proceedings of the 2022 IEEE International Workshop on Information Forensics and Security (WIFS), Virtual, 12–16 December 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Hafeez, A.; Mohan, J.; Girdhar, M.; Awad, S.S. Machine Learning based ECU Detection for Automotive Security. In Proceedings of the 2021 17th International Computer Engineering Conference (ICENCO), Giza, Egypt, 29–30 December 2021; pp. 73–81. [Google Scholar] [CrossRef]
- Fugiglando, U.; Massaro, E.; Santi, P.; Milardo, S.; Abida, K.; Stahlmann, R.; Netter, F.; Ratti, C. Driving Behavior Analysis through CAN Bus Data in an Uncontrolled Environment. IEEE Trans. Intell. Transp. Syst. 2019, 20, 737–748. [Google Scholar] [CrossRef]
- Prodanov, W.; Valle, M.; Buzas, R. A Controller Area Network Bus Transceiver Behavioral Model for Network Design and Simulation. IEEE Trans. Ind. Electron. 2009, 56, 3762–3771. [Google Scholar] [CrossRef]
- Hafeez, A.; Topolovec, K.; Awad, S. ECU Fingerprinting through Parametric Signal Modeling and Artificial Neural Networks for In-vehicle Security against Spoofing Attacks. In Proceedings of the 2019 15th International Computer Engineering Conference (ICENCO), Cairo, Egypt, 29–30 December 2019; pp. 29–38. [Google Scholar] [CrossRef]
- Cappelli, I.; Carli, F.; Fort, A.; Intravaia, M.; Micheletti, F.; Peruzzi, G.; Vignoli, V. Enhanced Visible Light Localization Based on Machine Learning and Optimized Fingerprinting in Wireless Sensor Networks. IEEE Trans. Instrum. Meas. 2023, 72, 9503410. [Google Scholar] [CrossRef]
- Thakur, S.; Moreno, C.; Fischmeister, S. CANOA: CAN Origin Authentication through Power Side-Channel Monitoring. ACM Trans. Cyber Phys. Syst. 2022. [Google Scholar] [CrossRef]
- Ahmed, S.; Juliato, M.; Gutierrez, C.; Sastry, M. Two-point voltage fingerprinting: Increasing detectability of ecu masquerading attacks. arXiv 2021, arXiv:2102.10128. [Google Scholar]
- Lesi, V.; Juliato, M.; Ahmed, S.; Gutierrez, C.; Wang, Q.; Sastry, M. Intrusion Detection and Localization for Networked Embedded Control Systems. arXiv 2021, arXiv:2106.09826. [Google Scholar]
- Wang, Q.; Qian, Y.; Lu, Z.; Shoukry, Y.; Qu, G. A Delay based Plug-in-Monitor for Intrusion Detection in Controller Area Network. In Proceedings of the 2018 Asian Hardware Oriented Security and Trust Symposium (AsianHOST), Hong Kong, China, 17–18 December 2018; pp. 86–91. [Google Scholar] [CrossRef]
- Li, J.; Zhang, M.; Lai, Y. A Light-Weighted Machine Learning Based ECU Identification for Automative CAN Security; Technical Report; EasyChair: Manchester, UK, 2023. [Google Scholar]
- Khalaf, R.H.; Mohammed, A.H. Confidentiality and integrity of sensing data transmission in iot application. Int. J. Eng. Technol. 2018, 7, 240–245. [Google Scholar]
- Tchernykh, A.; Schwiegelsohn, U.; Talbi, E.g.; Babenko, M. Towards understanding uncertainty in cloud computing with risks of confidentiality, integrity, and availability. J. Comput. Sci. 2019, 36, 100581. [Google Scholar] [CrossRef]
- Aminzade, M. Confidentiality, integrity and availability-finding a balanced IT framework. Netw. Secur. 2018, 2018, 9–11. [Google Scholar] [CrossRef]
- Samonas, S.; Coss, D. The CIA strikes back: Redefining confidentiality, integrity and availability in security. J. Inf. Syst. Secur. 2014, 10. Available online: https://api.semanticscholar.org/CorpusID:215838643 (accessed on 13 November 2023).
- Jukl, M.; Čupera, J. Using of tiny encryption algorithm in CAN-Bus communication. Res. Agric. Eng. 2016, 62, 50–55. [Google Scholar] [CrossRef]
- Farag, W.A. CANTrack: Enhancing automotive CAN bus security using intuitive encryption algorithms. In Proceedings of the 2017 7th International Conference on Modeling, Simulation, and Applied Optimization (ICMSAO), Sharjah, United Arab Emirates, 4–6 April 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Luo, J.N.; Wu, C.M.; Yang, M.H. A can-bus lightweight authentication scheme. Sensors 2021, 21, 7069. [Google Scholar] [CrossRef] [PubMed]
- Nürnberger, S.; Rossow, C. –vatican–vetted, authenticated can bus. In Proceedings of the Cryptographic Hardware and Embedded Systems—CHES 2016: 18th International Conference, Santa Barbara, CA, USA, 17–19 August 2016; pp. 106–124. [Google Scholar]
- Van Herrewege, A.; Singelee, D.; Verbauwhede, I. CANAuth-a simple, backward compatible broadcast authentication protocol for CAN bus. In Proceedings of the ECRYPT Workshop on Lightweight Cryptography. ECRYPT, Nara, Japan, 28 September–1 October 2011; Volume 2011, p. 20. [Google Scholar]
- Páez, F.; Kaschel, H. A Proposal for Data Authentication, Data Integrity and Replay Attack Rejection for the LIN Bus. In Proceedings of the 2021 IEEE CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Online, 6–9 December 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Dee, T.; Tyagi, A. Message Integrity and Authenticity in Secure CAN. IEEE Consum. Electron. Mag. 2021, 10, 33–40. [Google Scholar] [CrossRef]
- Thodi, B.T.; Chilukuri, B.R.; Vanajakshi, L. An analytical approach to real-time bus signal priority system for isolated intersections. J. Intell. Transp. Syst. 2022, 26, 145–167. [Google Scholar] [CrossRef]
- Long, K.; Wei, J.; Gu, J.; Yang, X. Headway-Based Multi-Route Transit Signal Priority at Isolated Intersection. IEEE Access 2020, 8, 187824–187831. [Google Scholar] [CrossRef]
- Wang, S.; Farjam, T.; Charalambous, T. A Priority-Based Distributed Channel Access Mechanism for Control over CAN-like Networks. In Proceedings of the 2021 European Control Conference (ECC), Delft, The Netherlands, 29 June–2 July 2021; pp. 176–182. [Google Scholar] [CrossRef]
- Maithili, K.; Vinothkumar, V.; Latha, P. Analyzing the security mechanisms to prevent unauthorized access in cloud and network security. J. Comput. Theor. Nanosci. 2018, 15, 2059–2063. [Google Scholar] [CrossRef]
- Muslukhov, I.; Boshmaf, Y.; Kuo, C.; Lester, J.; Beznosov, K. Know your enemy: The risk of unauthorized access in smartphones by insiders. In Proceedings of the 15th International Conference on Human-Computer Interaction with Mobile Devices and Services, Munich, Germany, 27–30 August 2013; pp. 271–280. [Google Scholar]
- AbdAllah, E.G.; Zulkernine, M.; Hassanein, H.S. Preventing unauthorized access in information centric networking. Secur. Priv. 2018, 1, e33. [Google Scholar] [CrossRef]
- Kitova, E.T.; Gorlov, N.I.; Bogachkov, I.V. Unauthorized Access Monitoring in Optical Access Networks. In Proceedings of the 2020 Systems of Signal Synchronization, Generating and Processing in Telecommunications (SYNCHROINFO), Svetlogorsk, Russia, 1–3 July 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Shi, J.; Li, R.; Hou, W. A Mechanism to Resolve the Unauthorized Access Vulnerability Caused by Permission Delegation in Blockchain-Based Access Control. IEEE Access 2020, 8, 156027–156042. [Google Scholar] [CrossRef]
- Razaque, A.; Shaldanbayeva, N.; Alotaibi, B.; Alotaibi, M.; Murat, A.; Alotaibi, A. Big data handling approach for unauthorized cloud computing access. Electronics 2022, 11, 137. [Google Scholar] [CrossRef]
- Aljabri, M.; Alahmadi, A.A.; Mohammad, R.M.A.; Alhaidari, F.; Aboulnour, M.; Alomari, D.M.; Mirza, S. Machine Learning-Based Detection for Unauthorized Access to IoT Devices. J. Sens. Actuator Netw. 2023, 12, 27. [Google Scholar] [CrossRef]
- Chandrasekaran, S.; Ramachandran, K.; Adarsh, S.; Puranik, A.K. Avoidance of Replay attack in CAN protocol using Authenticated Encryption. In Proceedings of the 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kharagpur, India, 1–3 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Xue, H.; Yang, Y.; Liu, J.; Xu, Z.; Dankanti, K.A. Reverse fast replay attack tunnel lighting system based on CAN bus. In Proceedings of the Second International Conference on Electronic Information Engineering, Big Data, and Computer Technology (EIBDCT 2023), Xishuangbanna, China, 6–8 January 2023; Volume 12642, pp. 82–87. [Google Scholar]
- Ansari, M.R.; Miller, W.T.; She, C.; Yu, Q. A low-cost masquerade and replay attack detection method for CAN in automotive vehicles. In Proceedings of the 2017 IEEE International Symposium on Circuits and Systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Rasheed, A.; Baza, M.; Badr, M.; Alshahrani, H.; Choo, K.K.R. Efficient Crypto Engine for Authenticated Encryption, Data Traceability, and Replay Attack Detection over CAN Bus Network. IEEE Trans. Netw. Sci. Eng. 2023, 1–17. [Google Scholar] [CrossRef]
- Thirumavalavasethurayar, P.; Ravi, T. Implementation of Replay Attack in Controller Area Network Bus using Universal Verification Methodology. In Proceedings of the 2021 International Conference on Artificial Intelligence and Smart Systems (ICAIS), Coimbatore, India, 25–27 March 2021; pp. 1142–1146. [Google Scholar] [CrossRef]
- Humayed, A.; Li, F.; Lin, J.; Luo, B. Cansentry: Securing can-based cyber-physical systems against denial and spoofing attacks. In Proceedings of the Computer Security—ESORICS 2020: 25th European Symposium on Research in Computer Security, ESORICS 2020, Guildford, UK, 14–18 September 2020; pp. 153–173. [Google Scholar]
- Amato, F.; Coppolino, L.; Mercaldo, F.; Moscato, F.; Nardone, R.; Santone, A. CAN-Bus Attack Detection with Deep Learning. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5081–5090. [Google Scholar] [CrossRef]
- Cros, O.; Chênevert, G. Hashing-based authentication for CAN bus and application to Denial-of-Service protection. In Proceedings of the 2019 3rd Cyber Security in Networking Conference (CSNet), Quito, Ecuador, 23–25 October 2019; pp. 91–98. [Google Scholar] [CrossRef]
- Palanca, A.; Evenchick, E.; Maggi, F.; Zanero, S. A stealth, selective, link-layer denial-of-service attack against automotive networks. In Proceedings of the Detection of Intrusions and Malware, and Vulnerability Assessment: 14th International Conference, DIMVA 2017, Bonn, Germany, 6–7 July 2017; pp. 185–206. [Google Scholar]
- Bozdal, M.; Randa, M.; Samie, M.; Jennions, I. Hardware trojan enabled denial of service attack on can bus. Procedia Manuf. 2018, 16, 47–52. [Google Scholar] [CrossRef]
- Levy, E.; Shabtai, A.; Groza, B.; Murvay, P.S.; Elovici, Y. CAN-LOC: Spoofing Detection and Physical Intrusion Localization on an In-Vehicle CAN Bus Based on Deep Features of Voltage Signals. IEEE Trans. Inf. Forensics Secur. 2023, 18, 4800–4814. [Google Scholar] [CrossRef]
- Lalouani, W.; Dang, Y.; Younis, M. Mitigating voltage fingerprint spoofing attacks on the controller area network bus. Clust. Comput. 2023, 26, 1447–1460. [Google Scholar] [CrossRef]
- Dagan, T.; Wool, A. Parrot, a software-only anti-spoofing defense system for the CAN bus. ESCAR Eur. 2016, 34. [Google Scholar]
- Yang, Y.; Duan, Z.; Tehranipoor, M. Identify a spoofing attack on an in-vehicle CAN bus based on the deep features of an ECU fingerprint signal. Smart Cities 2020, 3, 17–30. [Google Scholar] [CrossRef]
- Iehira, K.; Inoue, H.; Ishida, K. Spoofing attack using bus-off attacks against a specific ECU of the CAN bus. In Proceedings of the 2018 15th IEEE Annual Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 January 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Ruotsalainen, H.; Shen, G.; Zhang, J.; Fujdiak, R. LoRaWAN Physical Layer-Based Attacks and Countermeasures, a Review. Sensors 2022, 22, 3127. [Google Scholar] [CrossRef] [PubMed]
- Givehchian, H.; Bhaskar, N.; Herrera, E.R.; Soto, H.R.L.; Dameff, C.; Bharadia, D.; Schulman, A. Evaluating Physical-Layer BLE Location Tracking Attacks on Mobile Devices. In Proceedings of the 2022 IEEE Symposium on Security and Privacy (SP), San Francisco, CA, USA, 23–25 May 2022; pp. 1690–1704. [Google Scholar] [CrossRef]
- Nooraiepour, A.; Bajwa, W.U.; Mandayam, N.B. Learning-Aided Physical Layer Attacks against Multicarrier Communications in IoT. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 239–254. [Google Scholar] [CrossRef]
- Huang, S.; Lin, C.; Zhou, K.; Yao, Y.; Lu, H.; Zhu, F. Identifying physical-layer attacks for IoT security: An automatic modulation classification approach using multi-module fusion neural network. Phys. Commun. 2020, 43, 101180. [Google Scholar] [CrossRef]
- Salahdine, F.; Kaabouch, N. Security threats, detection, and countermeasures for physical layer in cognitive radio networks: A survey. Phys. Commun. 2020, 39, 101001. [Google Scholar] [CrossRef]
- Mohammed, A.Z.; Man, Y.; Gerdes, R.; Li, M.; Celik, Z.B. Physical layer data manipulation attacks on the can bus. In Proceedings of the International Workshop on Automotive and Autonomous Vehicle Security (AutoSec), San Diego, CA, USA, 24 April 2022. [Google Scholar]
- Oladimeji, D.; Rasheed, A.; Varol, C.; Baza, M.; Alshahrani, H.; Baz, A. CANAttack: Assessing Vulnerabilities within Controller Area Network. Sensors 2023, 23, 8223. [Google Scholar] [CrossRef]
- Bozdal, M.; Samie, M.; Aslam, S.; Jennions, I. Evaluation of can bus security challenges. Sensors 2020, 20, 2364. [Google Scholar] [CrossRef] [PubMed]
- Bozdal, M.; Samie, M.; Jennions, I. A survey on can bus protocol: Attacks, challenges, and potential solutions. In Proceedings of the 2018 International Conference on Computing, Electronics & Communications Engineering (iCCECE), Southend, UK, 16–17 August 2018; pp. 201–205. [Google Scholar]
- Lokman, S.F.; Othman, A.T.; Abu-Bakar, M.H. Intrusion detection system for automotive Controller Area Network (CAN) bus system: A review. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 184. [Google Scholar] [CrossRef]
- TensorFlow’s Official Web Site. Available online: https://www.tensorflow.org/?hl=en (accessed on 13 November 2023).
- Keras’ Official Web Site. Available online: https://keras.io/ (accessed on 13 November 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Equation |
|---|---|
| Max value | |
| Min value | |
| Mean | |
| Standard Deviation | |
| Skewness | |
| Kurtosis |
| Number of Times Softmax Score | |||
|---|---|---|---|
| Classified as A | Classified as B | Classified as C | |
| Unit A | 200 | 0 | 0 |
| Unit B | 0 | 200 | 0 |
| Unit C | 0 | 0 | 200 |
| Intruder 1 | 0 | 0 | 200 |
| Intruder 2 | 0 | 0 | 200 |
| Number of Times Softmax Score | ||||
|---|---|---|---|---|
| Classified as A | Classified as B | Classified as C | Classified as Unk | |
| Unit A | 191 | 0 | 0 | 1 |
| Unit B | 0 | 200 | 0 | 0 |
| Unit C | 0 | 0 | 200 | 0 |
| Intruder 1 | 0 | 0 | 0 | 200 |
| Intruder 2 | 0 | 0 | 10 | 2 |
| Unit | ID HEX | Standard Frame | Data Length [Bytes] | Randomized Data [Bit] | Bit Rate |
|---|---|---|---|---|---|
| A | EE, FE | Yes | 8 | 64 | |
| B | 101, 103 | Yes | 8 | 64 | |
| C | 105, 116 | Yes | 8 | 64 |
| Unit C | ||||
|---|---|---|---|---|
| Classified as A | Classified as B | Classified as C | Classified as Unk | |
| Mean score | ||||
| Std Dev score | ||||
| Number of times score | 0 | 0 | 48 | 0 |
| Number of times score | 0 | 0 | 48 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dini, P.; Saponara, S. Design and Experimental Assessment of Real-Time Anomaly Detection Techniques for Automotive Cybersecurity. Sensors 2023, 23, 9231. https://doi.org/10.3390/s23229231
Dini P, Saponara S. Design and Experimental Assessment of Real-Time Anomaly Detection Techniques for Automotive Cybersecurity. Sensors. 2023; 23(22):9231. https://doi.org/10.3390/s23229231
Chicago/Turabian StyleDini, Pierpaolo, and Sergio Saponara. 2023. "Design and Experimental Assessment of Real-Time Anomaly Detection Techniques for Automotive Cybersecurity" Sensors 23, no. 22: 9231. https://doi.org/10.3390/s23229231
APA StyleDini, P., & Saponara, S. (2023). Design and Experimental Assessment of Real-Time Anomaly Detection Techniques for Automotive Cybersecurity. Sensors, 23(22), 9231. https://doi.org/10.3390/s23229231