

A 3.0 µm Pixels and 1.5 µm Pixels Combined Complementary Metal-Oxide Semiconductor Image Sensor for High Dynamic Range Vision beyond 106 dB †
Abstract
:1. Introduction
2. Sensor Architecture
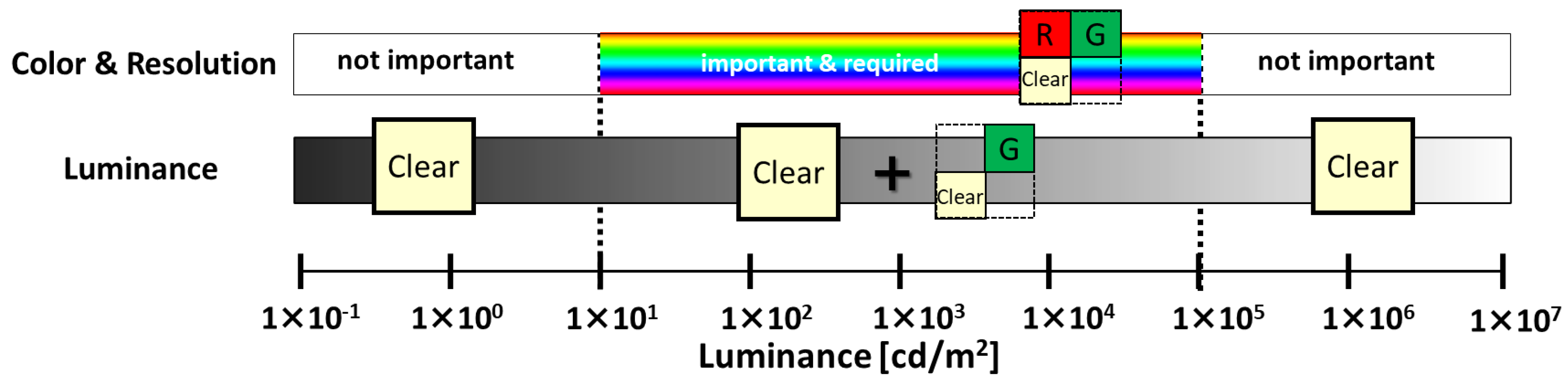
2.1. New Concept
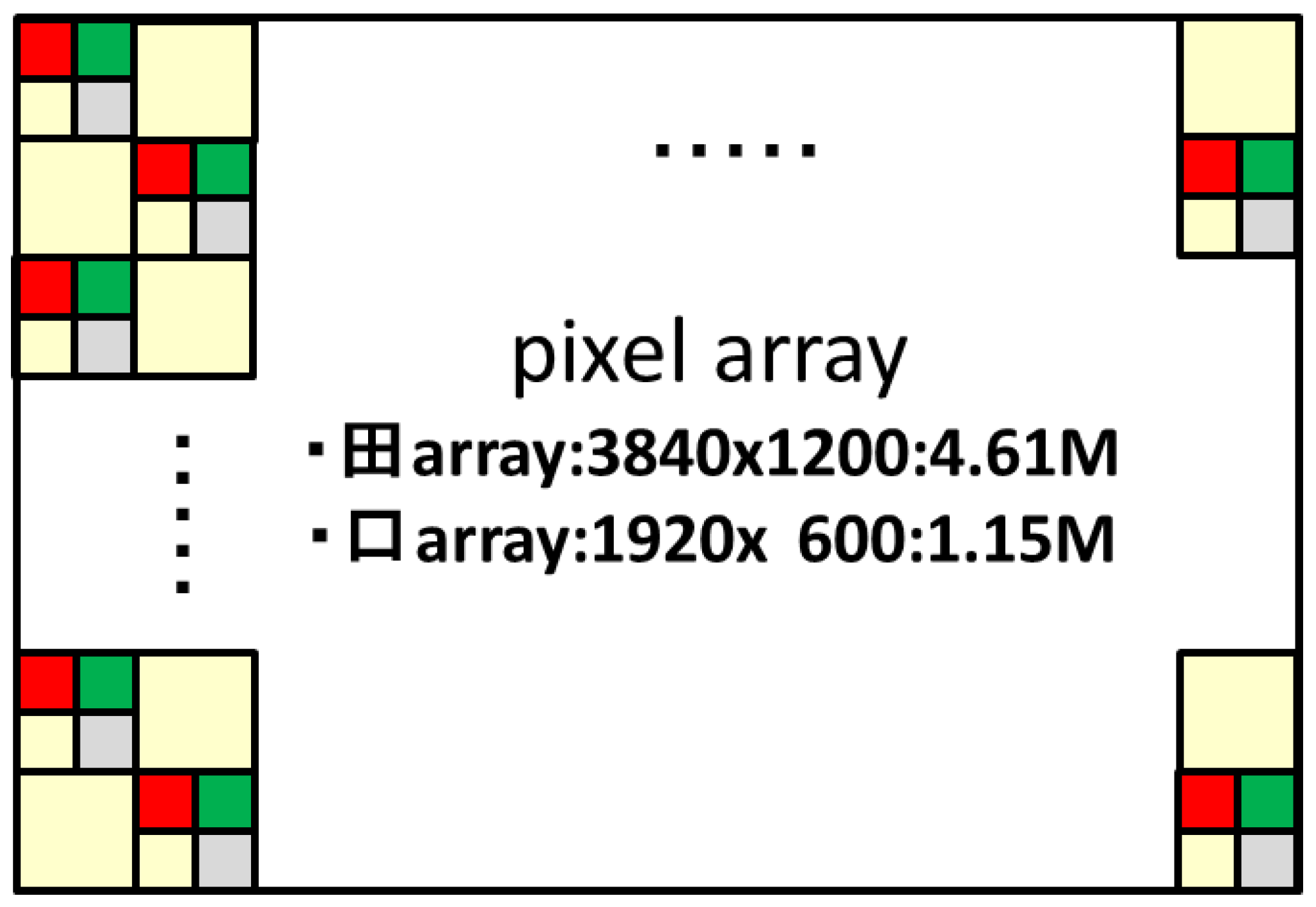
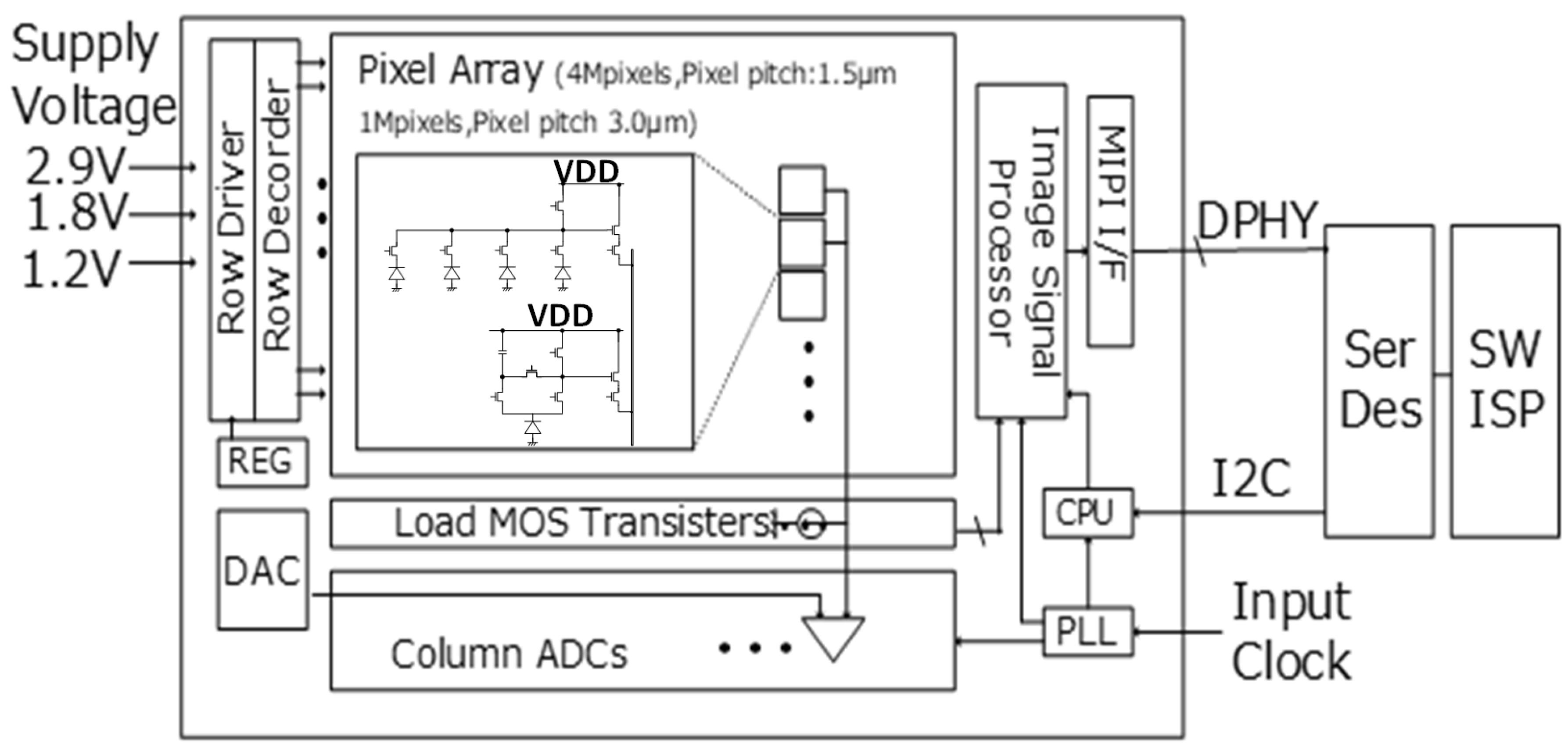
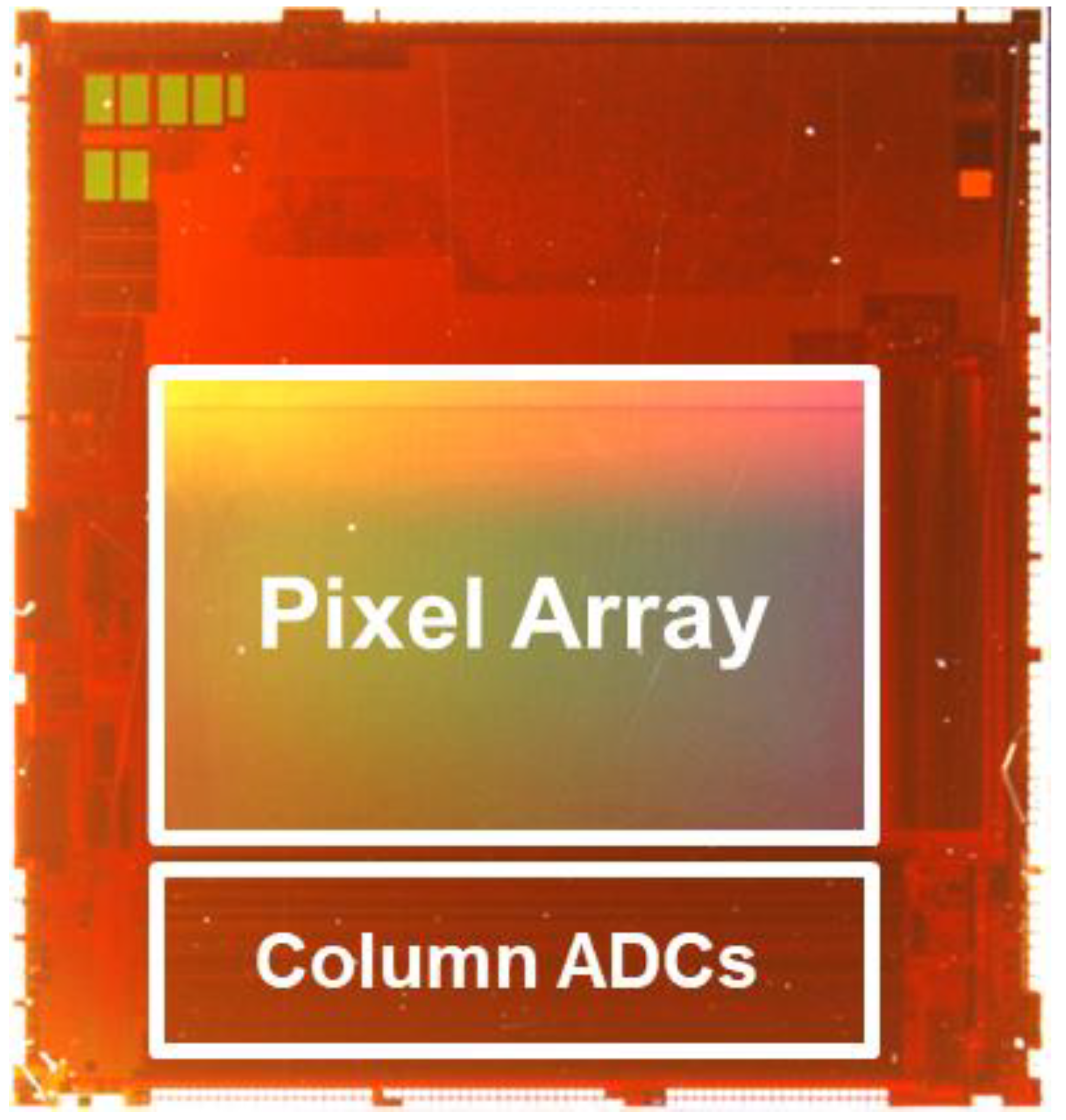
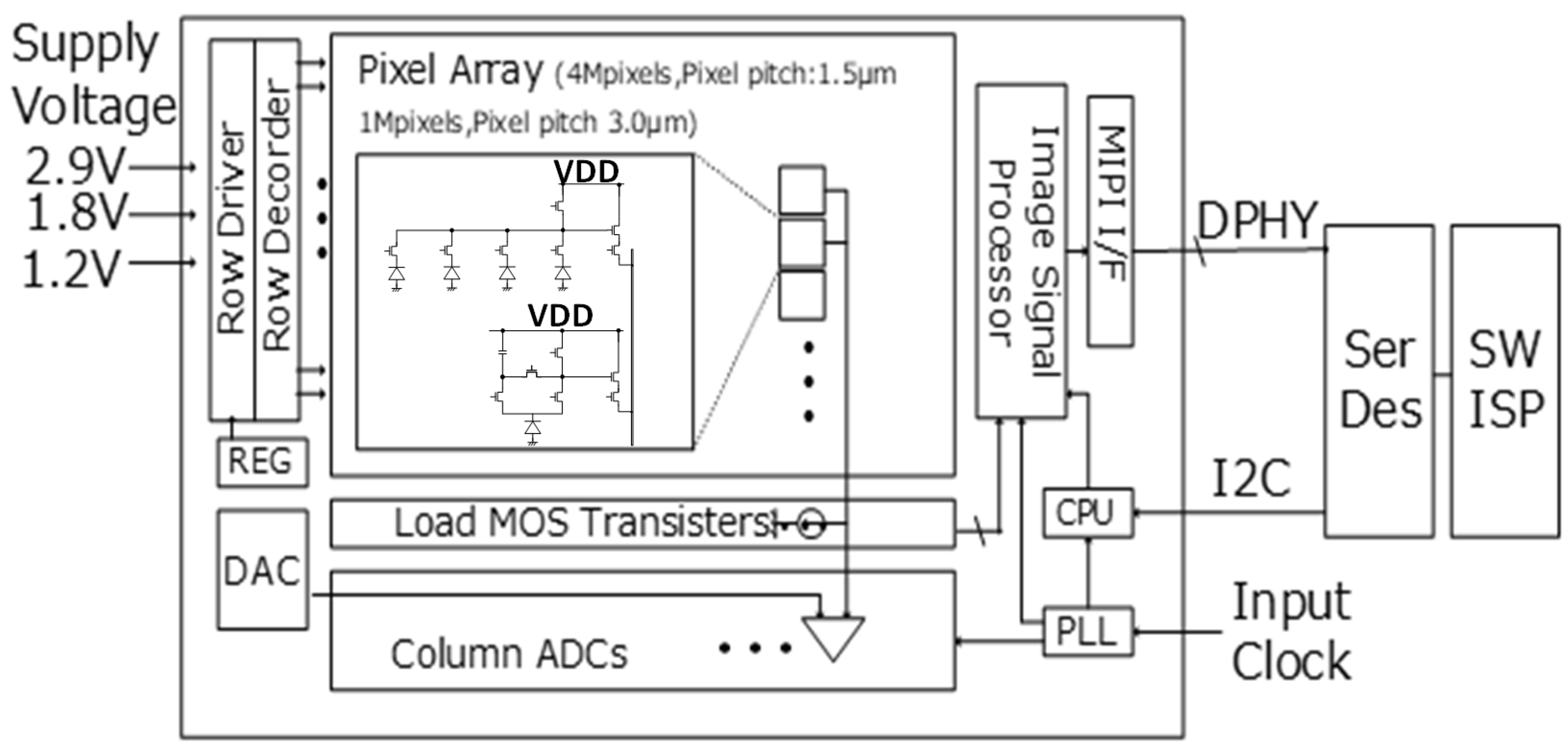
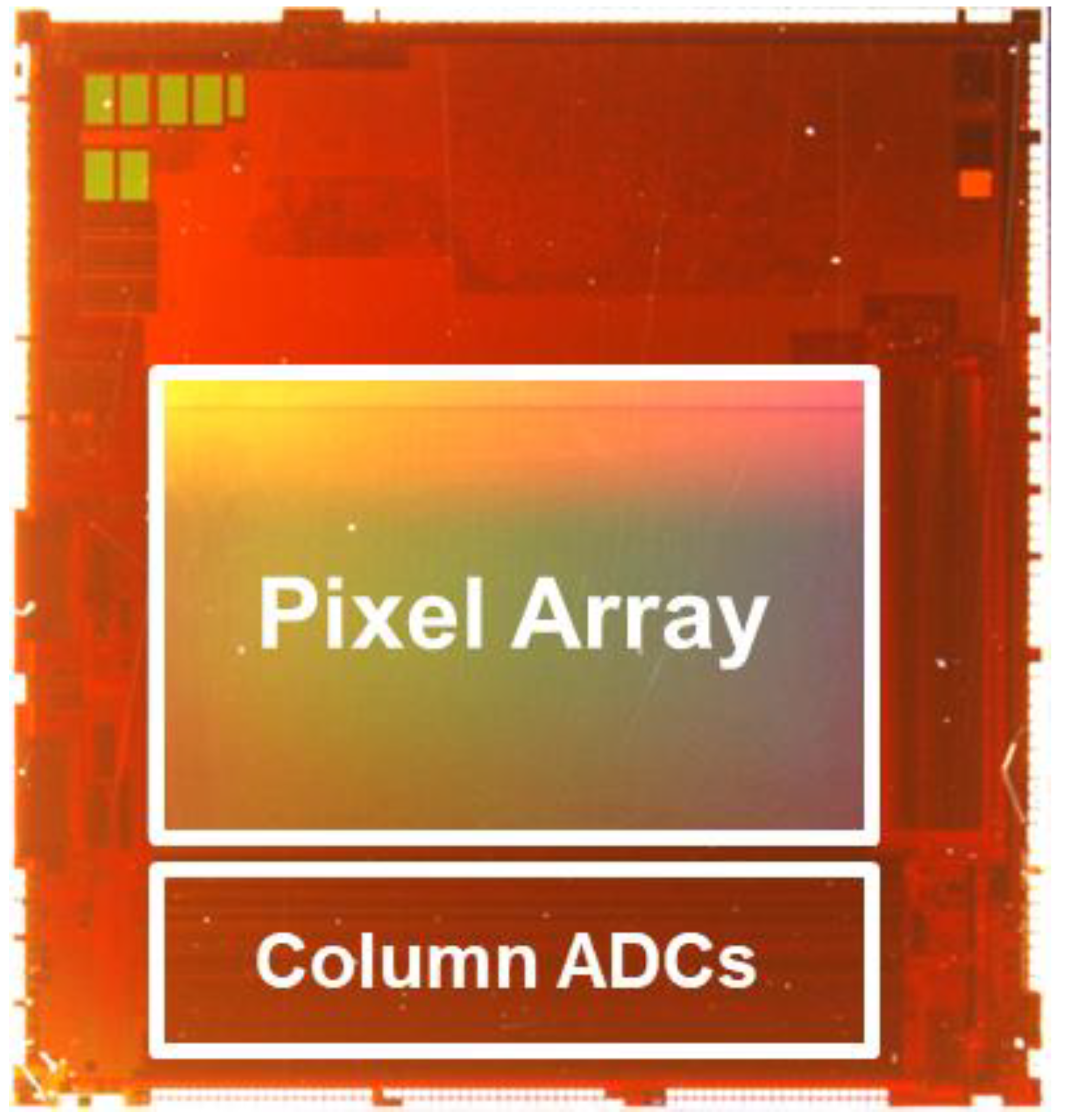
2.2. Sensor Configuration
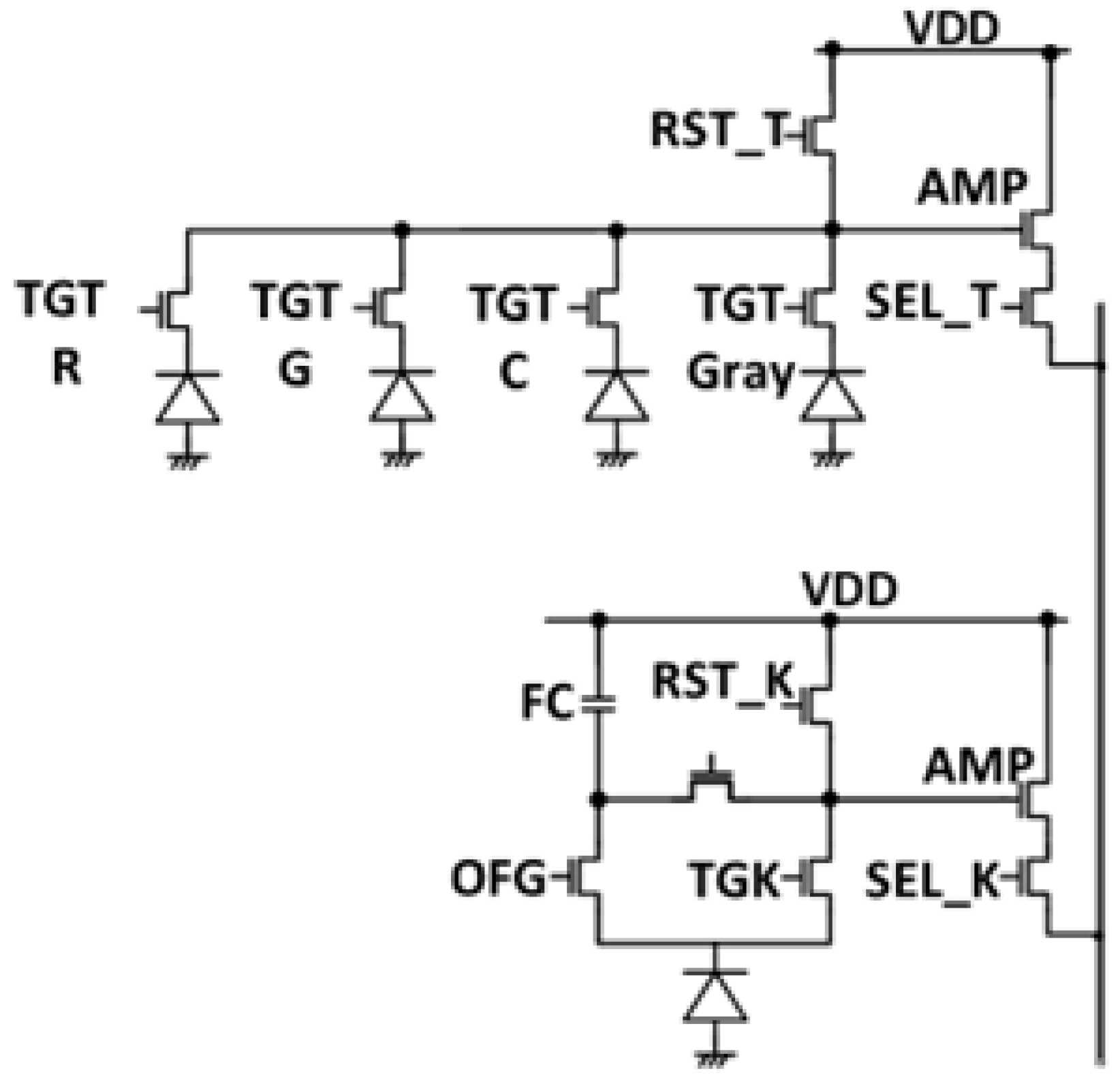
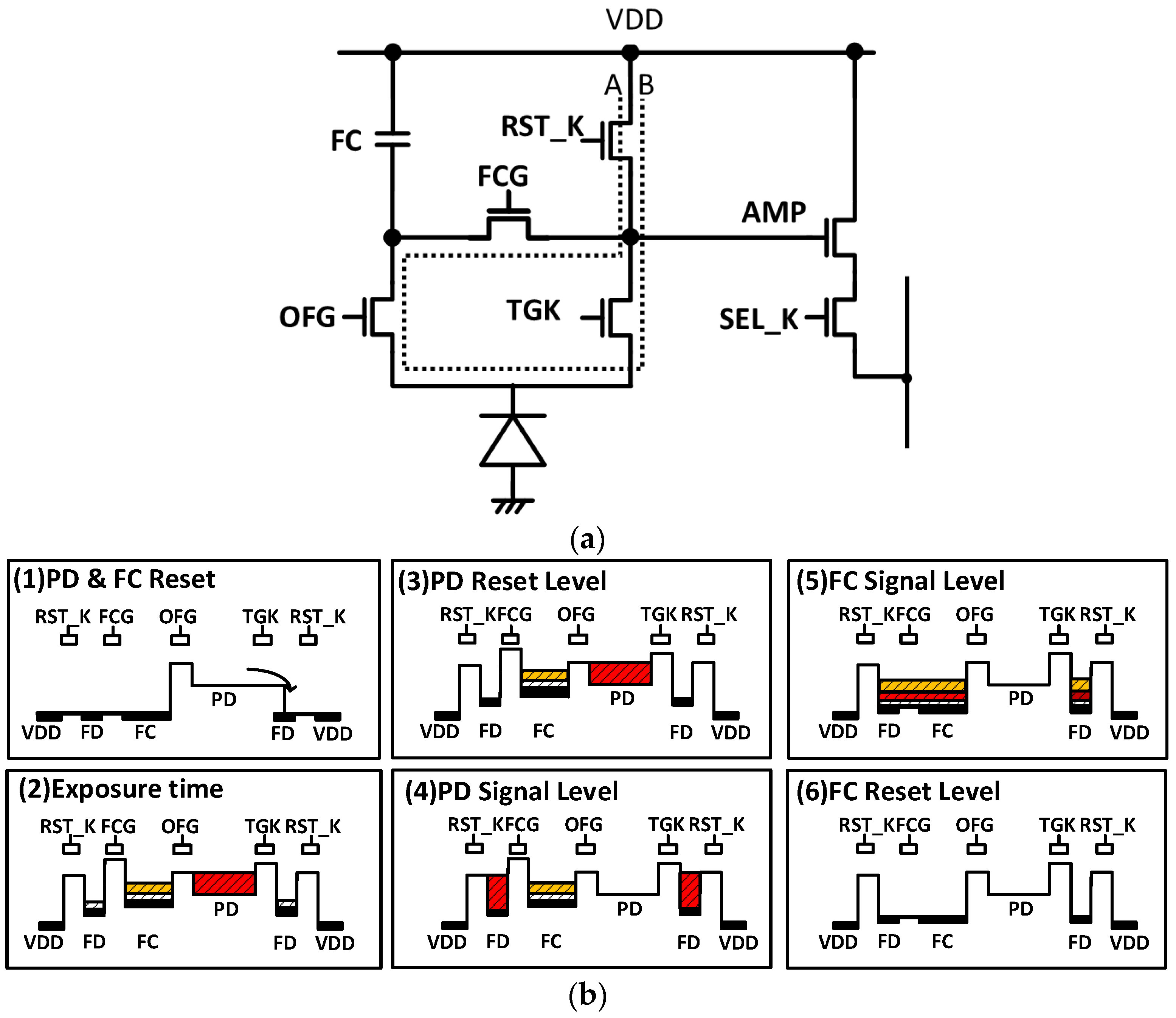
2.3. Pixel Circuit
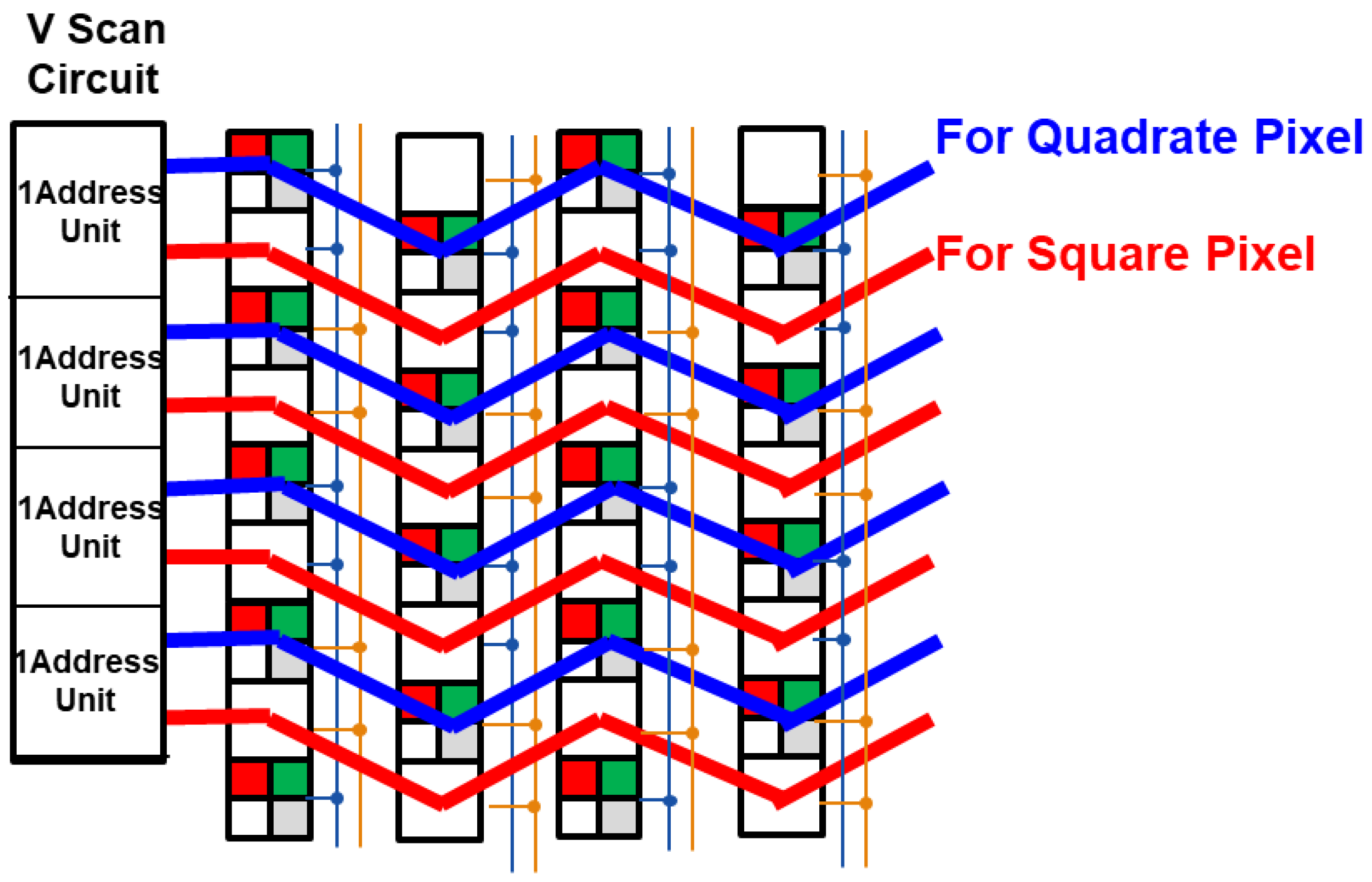
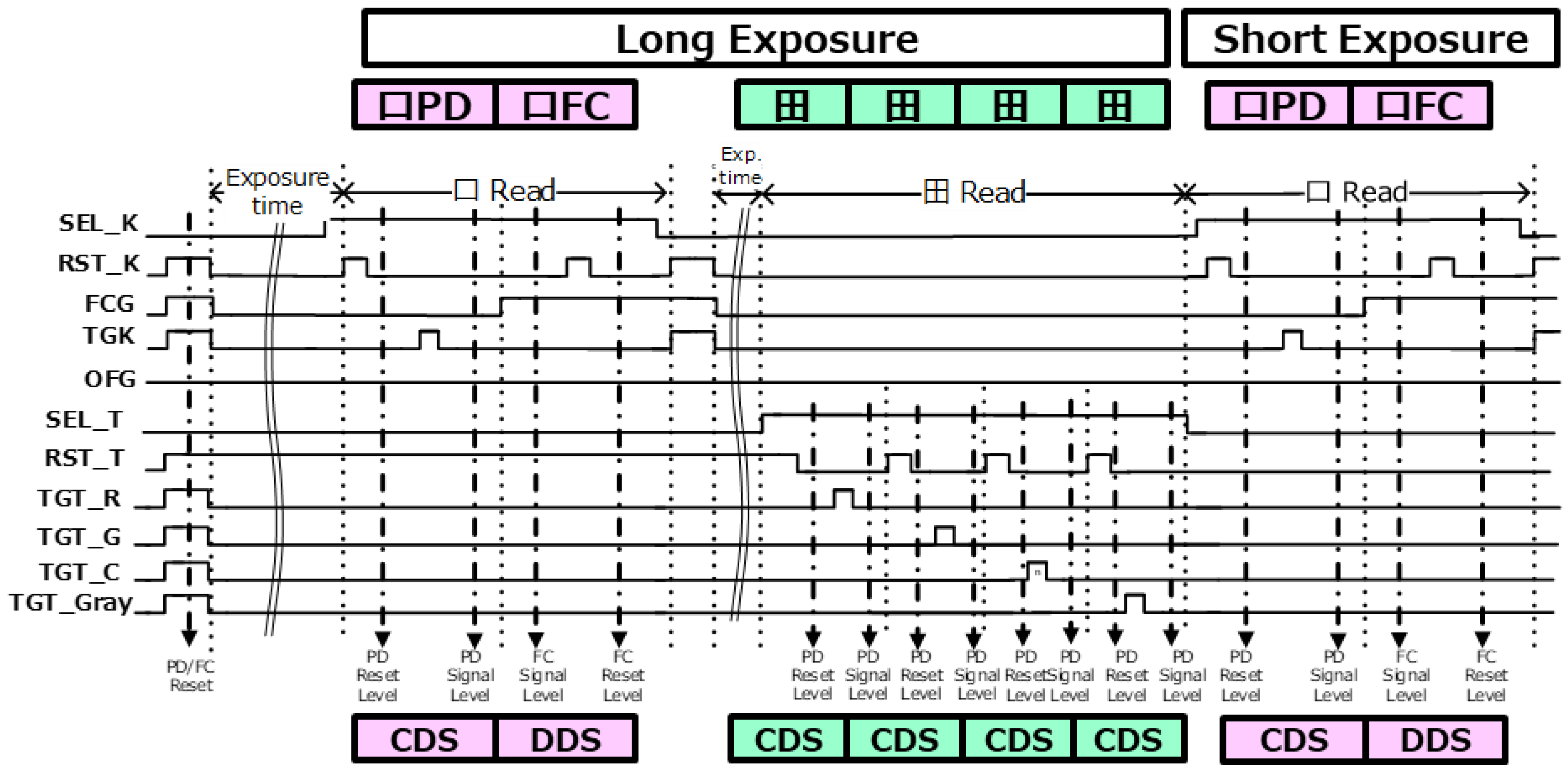
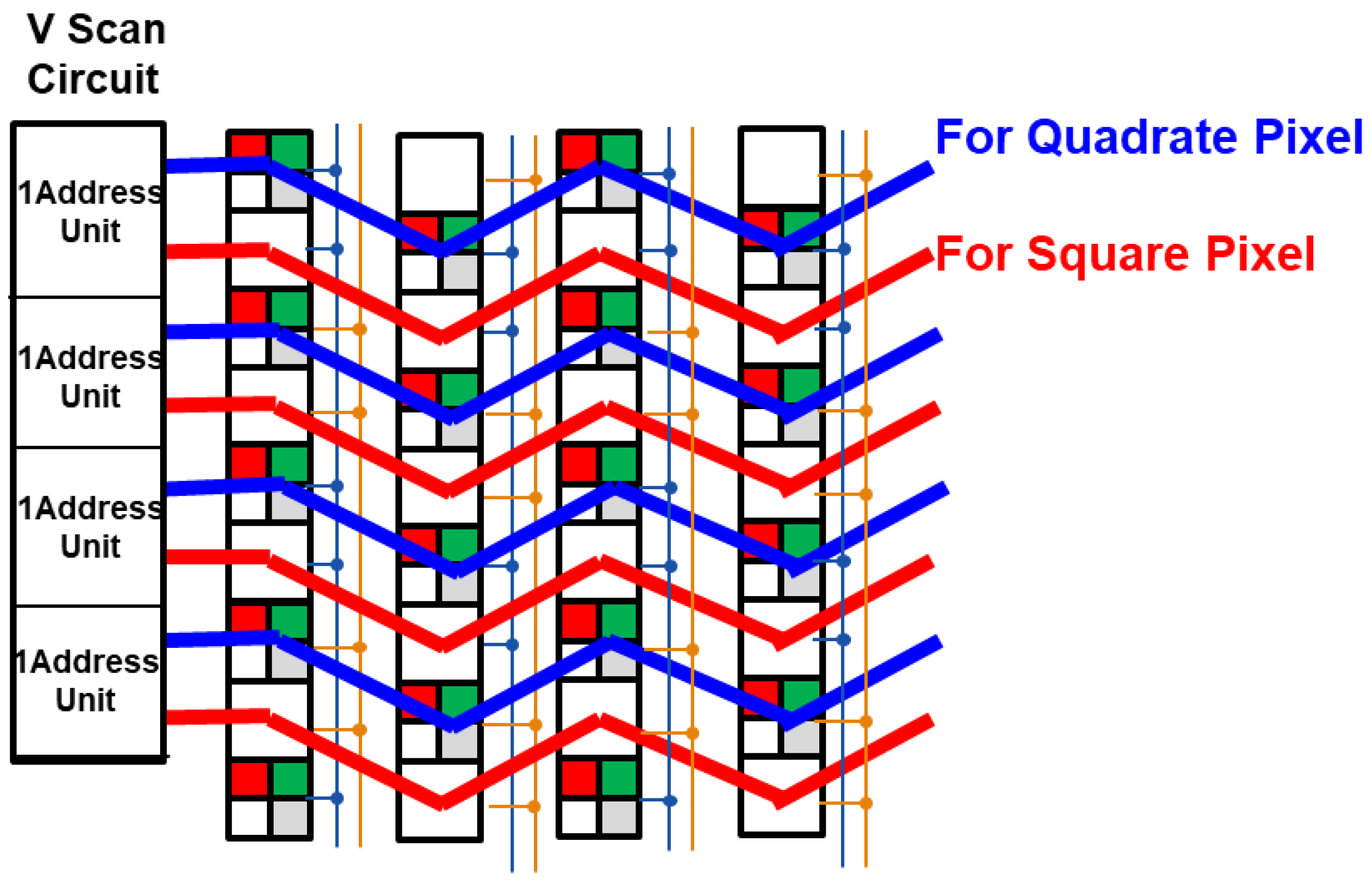
2.4. Pixel Read-Out Method
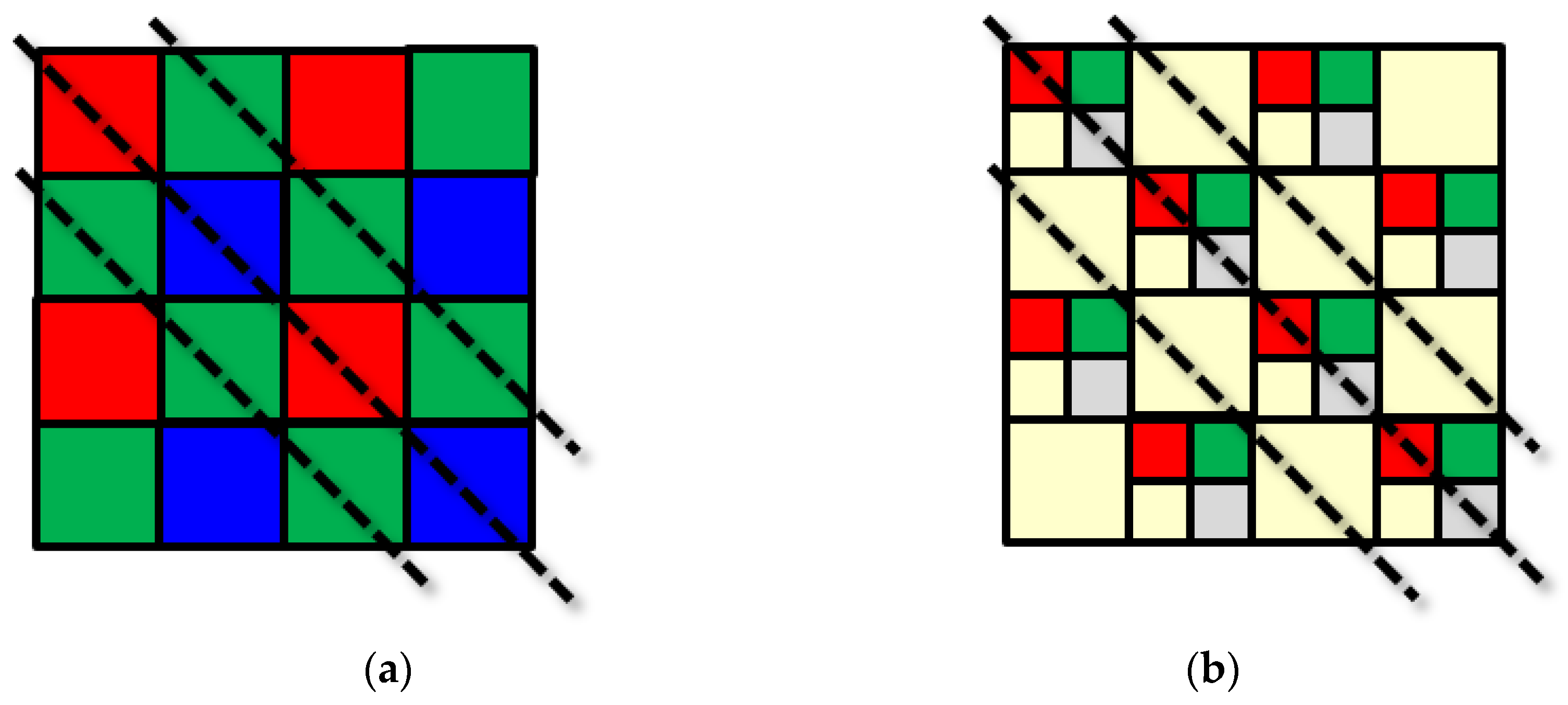
2.4.1. Square Pixel Read-Out Method
2.4.2. Quadrate–Square Pixel Read-Out Method
3. Sensor Characteristics
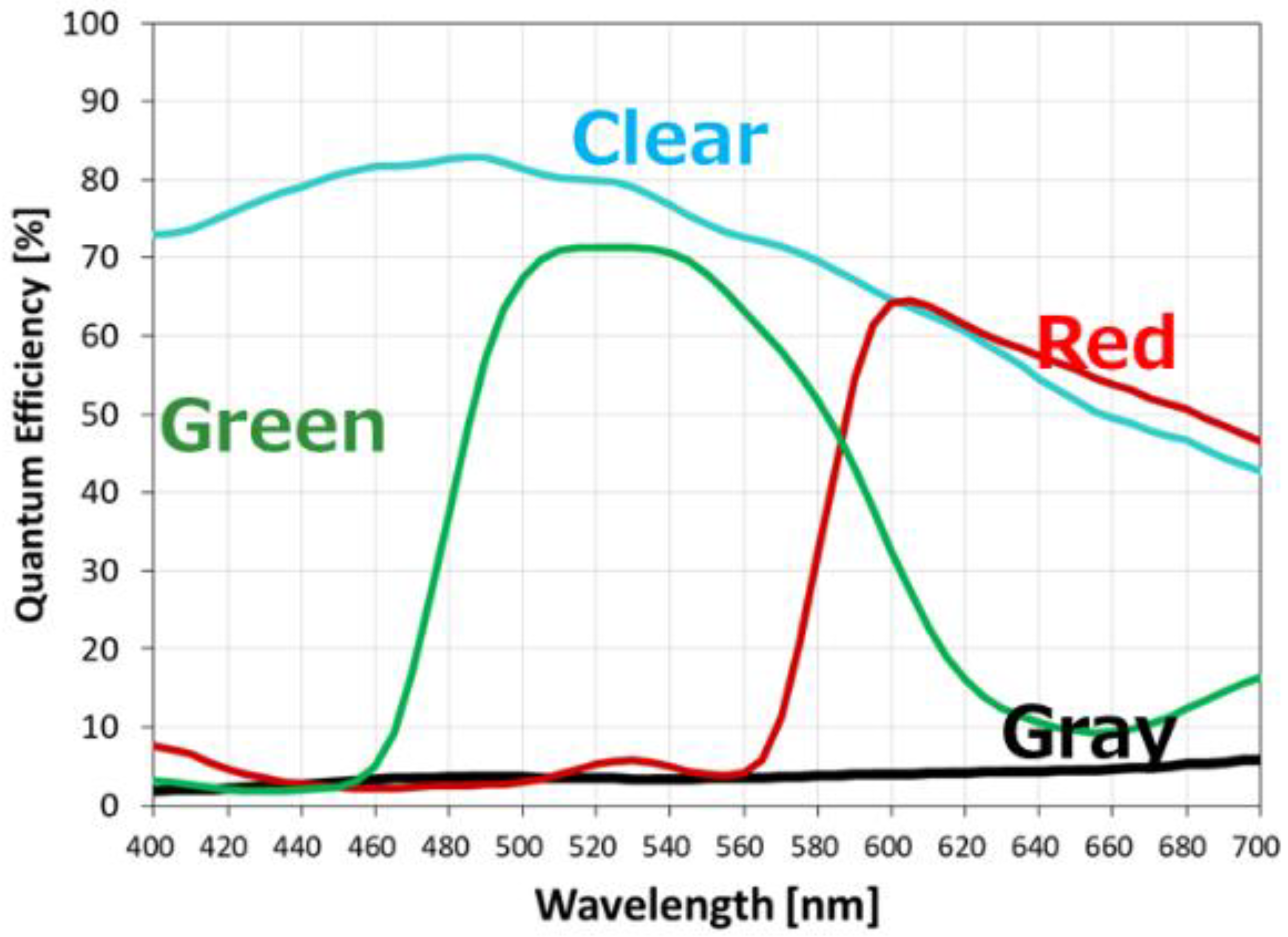
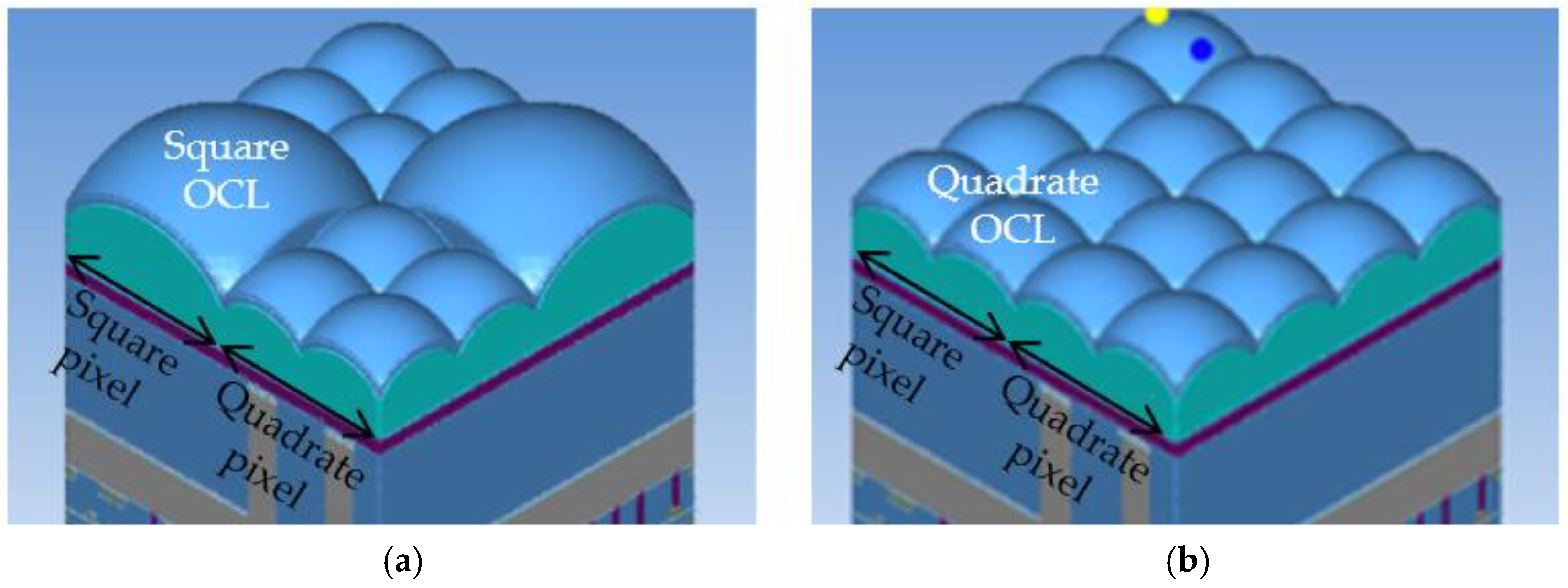
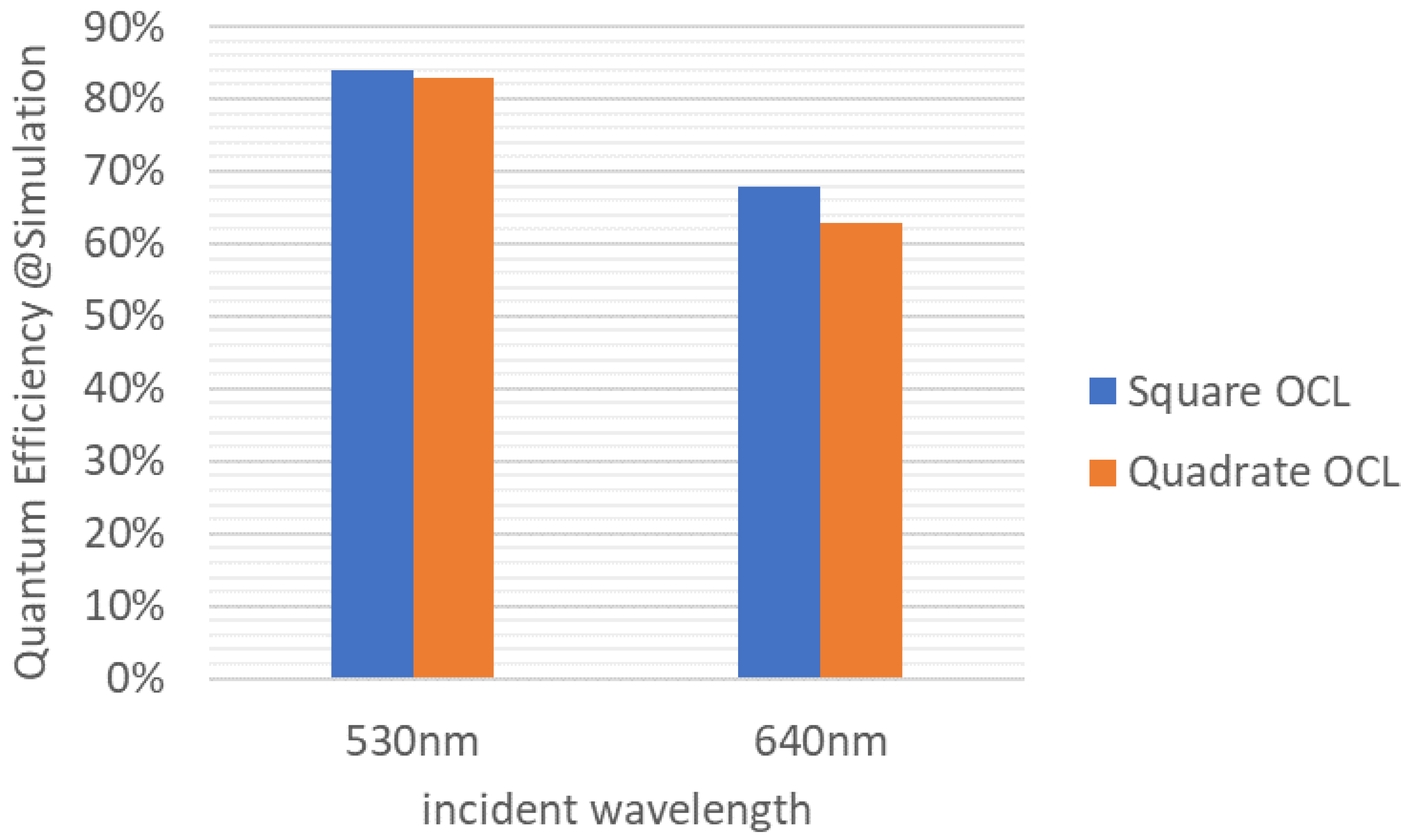
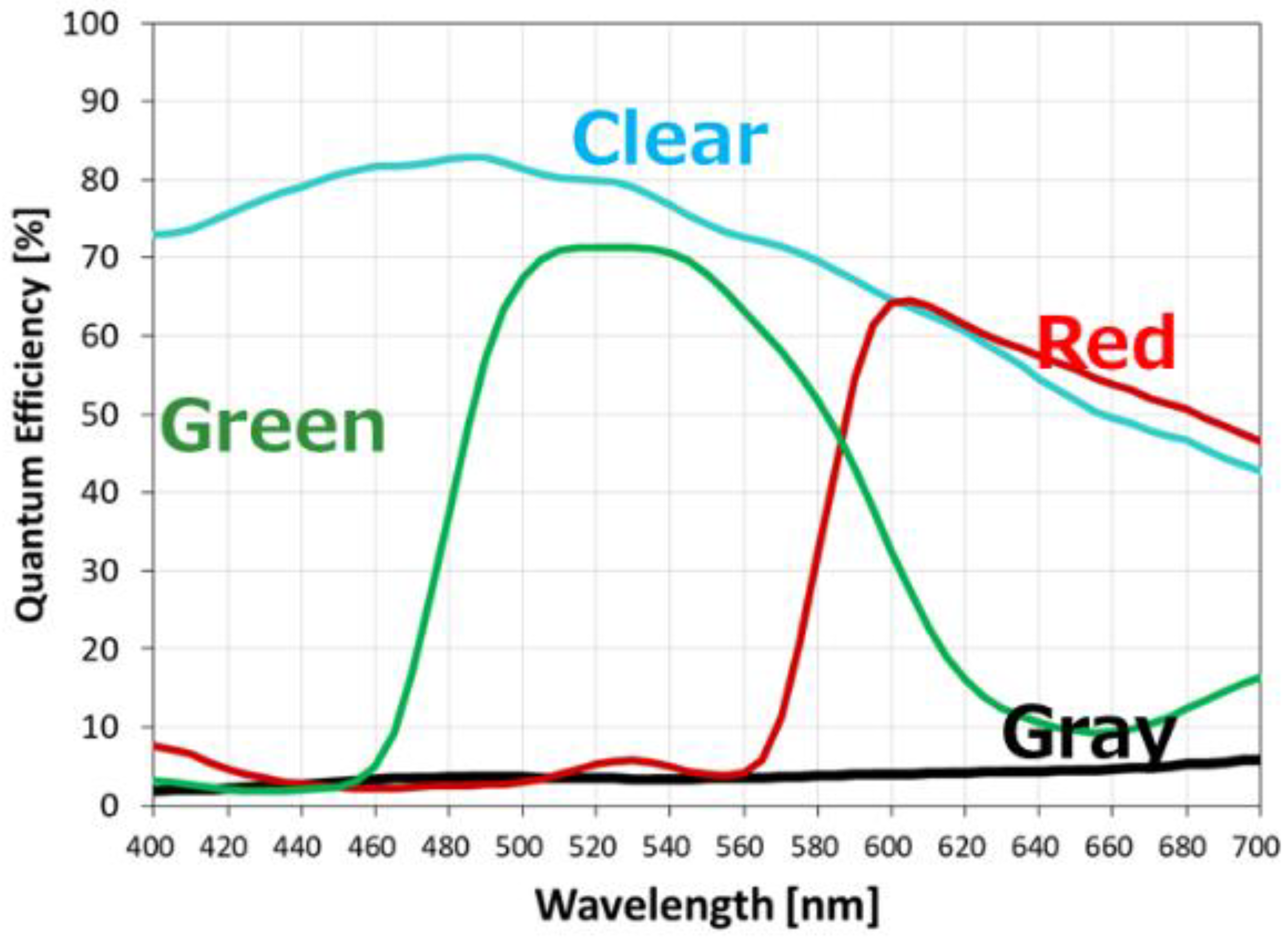
3.1. Quadrate Pixel Characterristics
3.2. Square Pixel Characterristics
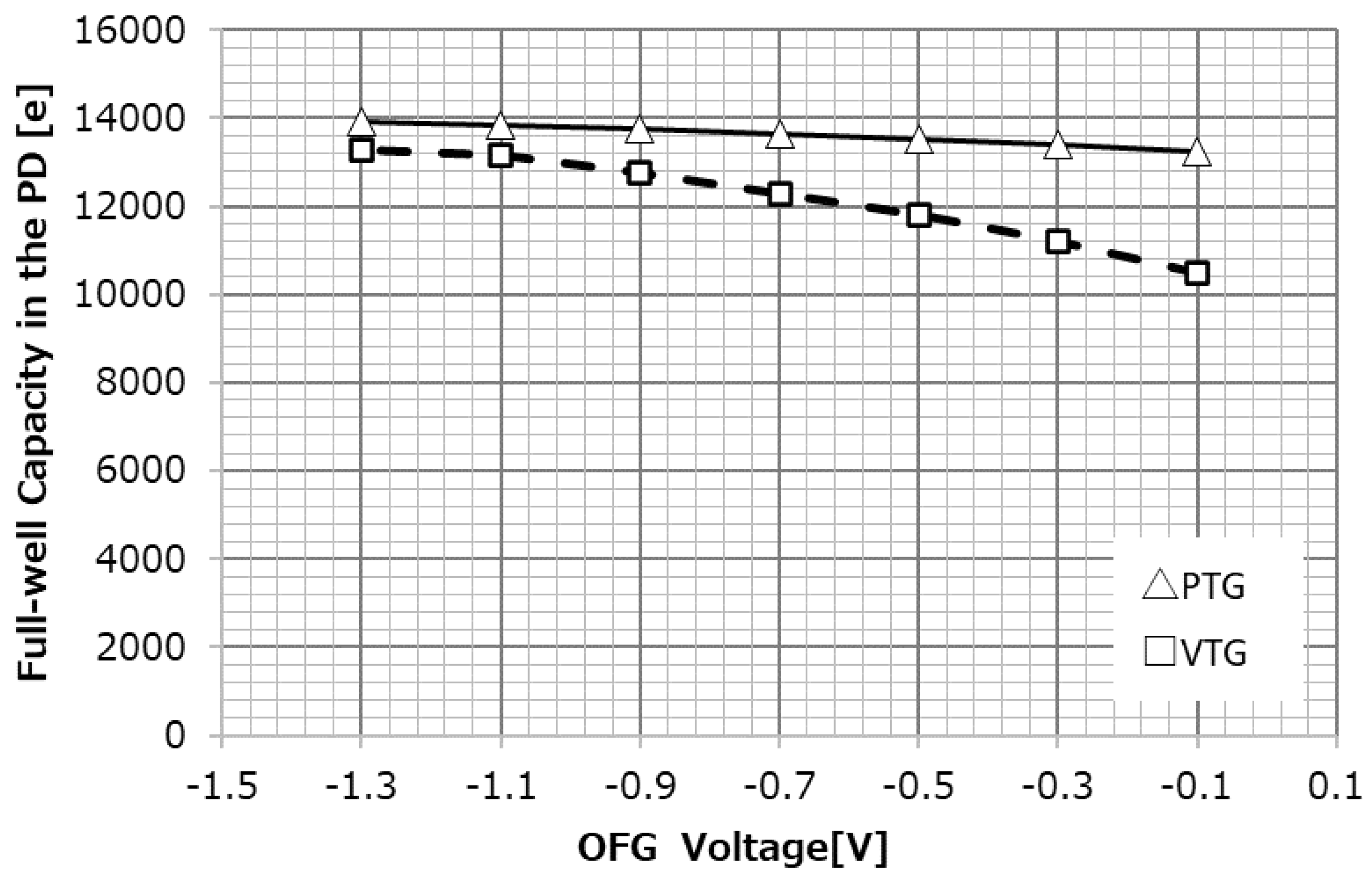
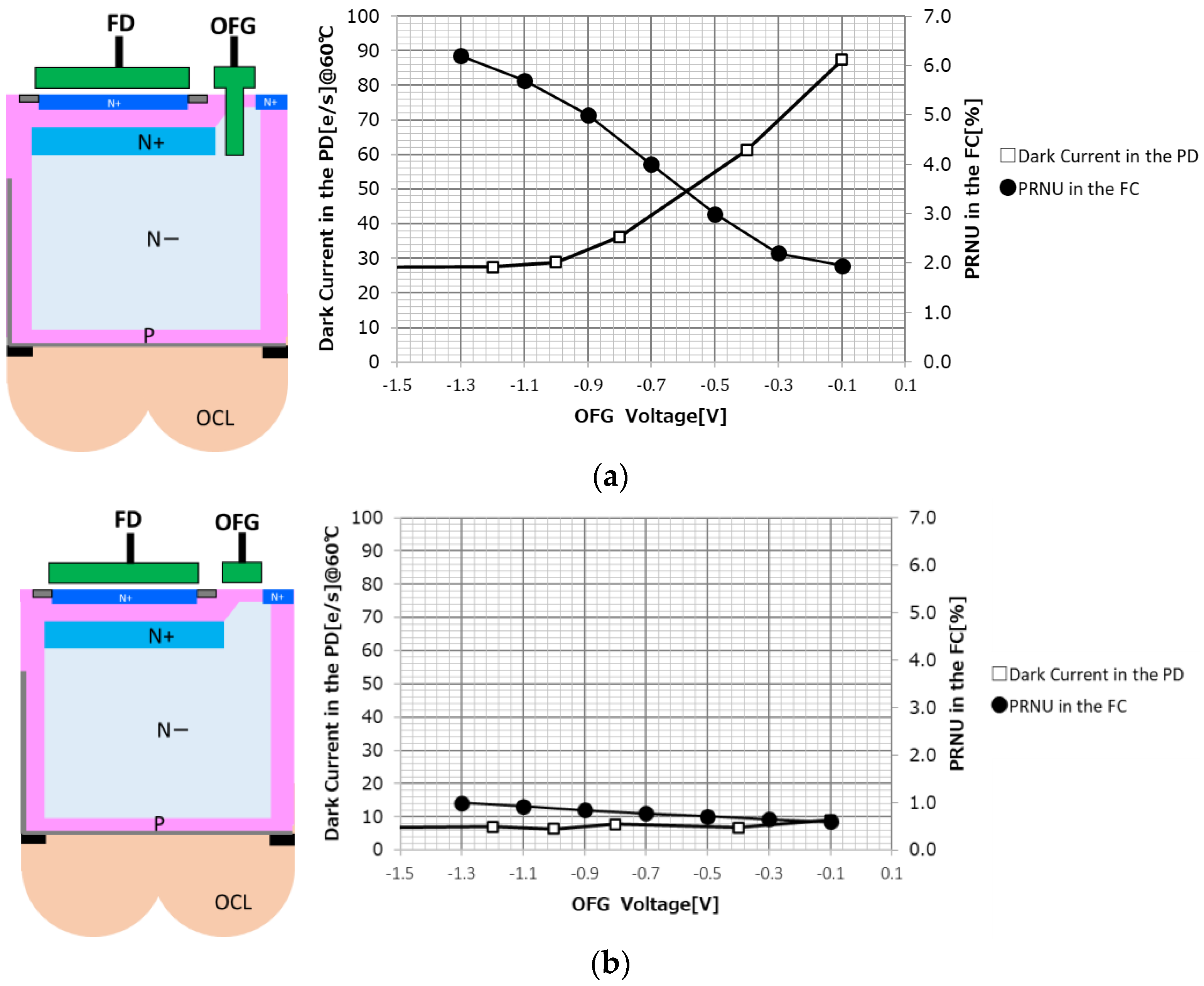
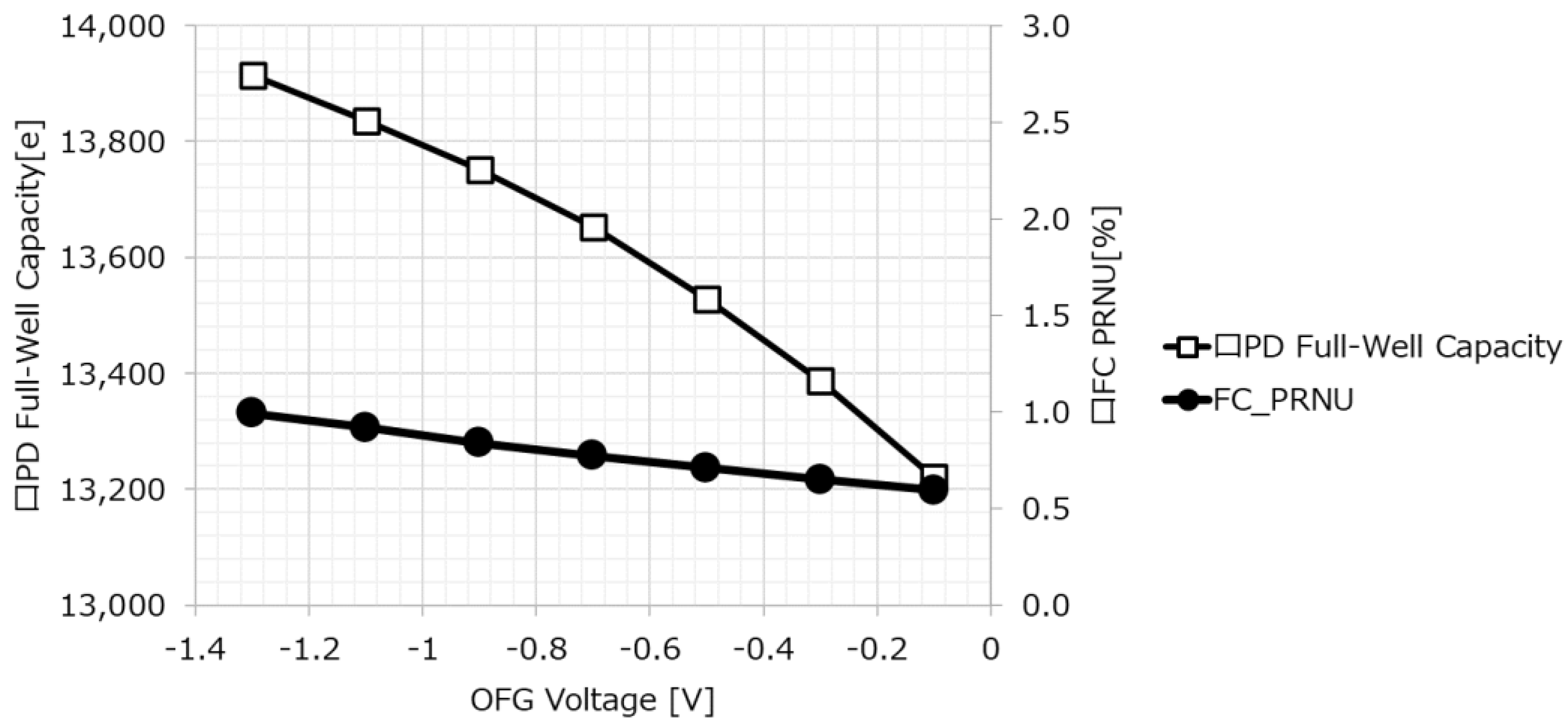
3.2.1. Transfer Structure of Overflow Gate for PD Characteristics
3.2.2. Analysis and Verification
3.2.3. Transfer Structure of Overflow Gate for FC Characteristics
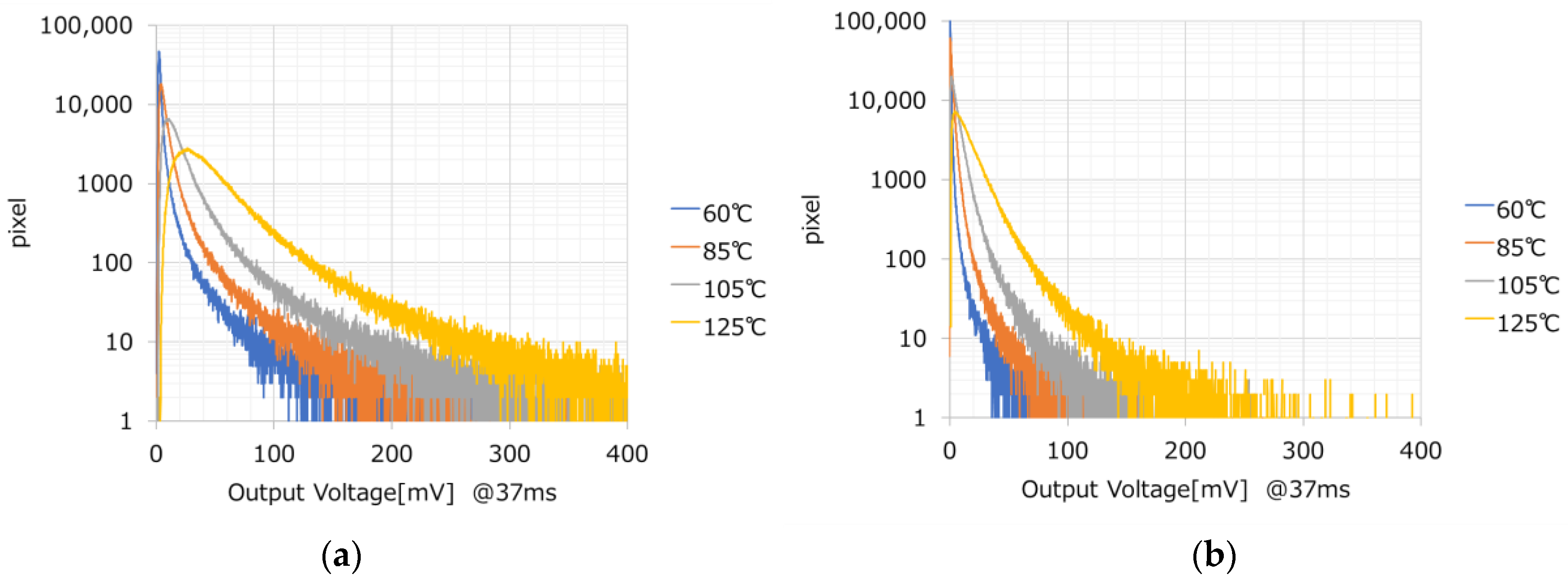
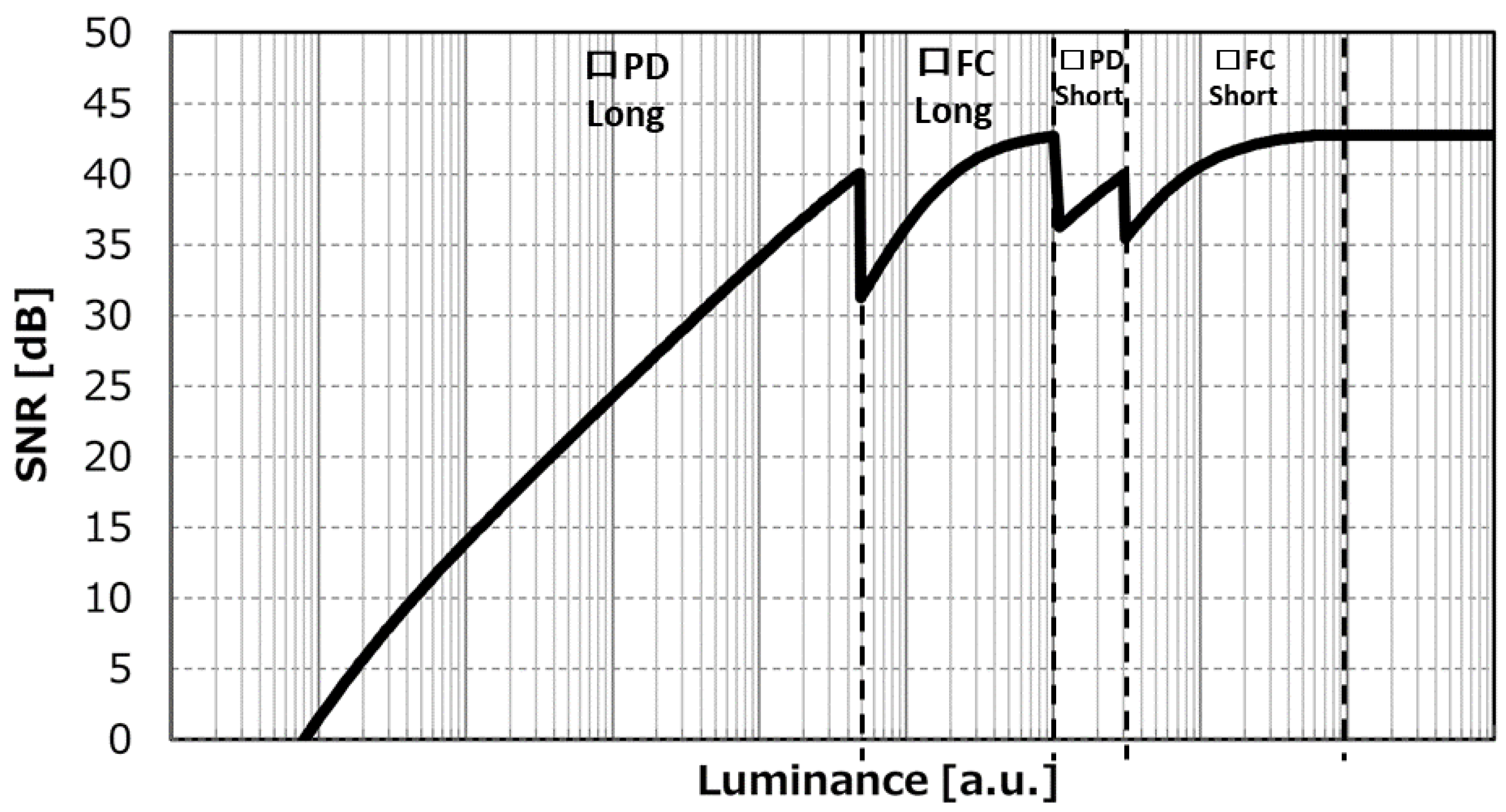
3.2.4. Square Pixel Characteristics
3.3. Quadrate–Square Pixel Characteristics
3.4. Synthesized Image
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Takayanagi, I.; Kuroda, R. HDR CMOS Image Sensors for Automotive Applications. IEEE Trans. Electron Devices 2022, 69, 2815–2823. [Google Scholar] [CrossRef]
- Fujihara, Y.; Murata, M.; Nakayama, S.; Kuroda, R.; Sugawa, S. An Over 120 dB Single ExposureWide Dynamic Range CMOS Image Sensor with Two-Stage Lateral Overflow Integration Capacitor. IEEE Trans. Electron Devices 2021, 68, 152–157. [Google Scholar] [CrossRef]
- Takayanagi, I.; Miyauchi, K.; Okura, S.; Mori, K.; Nakamura, J.; Sugawa, S. A 120-ke- Full-Well Capacity 160 V/e- Conversion Gain 2.8 m Backside-Illuminated Pixel with a Lateral Overflow Integration Capacitor. Sensors 2019, 19, 5572. [Google Scholar] [CrossRef] [PubMed]
- Sugawa, S.; Akahane, N.; Adachi, S.; Mori, K.; Ishiuchi, T.; Mizobuchi, K. A 100 dB dynamic range CMOS image sensor using a lateral overflow integration capacitor. In Proceedings of the ISSCC, 2005 IEEE International Digest of Technical Papers, Solid-State Circuits Conference, San Francisco, CA, USA, 10 February 2005; IEEE: New York, NY, USA, 2005; pp. 352–603. [Google Scholar]
- Akahane, N.; Sugawa, S.; Adachi, S.; Mori, K.; Ishiuchi, T.; Mizobuchi, K. A sensitivity and linearity improvement of a 100-dBdynamic range CMOS image sensor using a lateral overflow integration capacitor. IEEE J. Solid-State Circuits 2006, 41, 851–858. [Google Scholar] [CrossRef]
- Innocent, M.; Velichko, S.; Lloyd, D.; Beck, J.; Hernandez, A.; Vanhoff, B.; Silsby, C.; Oberoi, A.; Singh, G.; Gurindagunta, S.; et al. Automotive 8.3 MP CMOS Image Sensor with 150 dB Dynamic Range and Light Flicker Mitigation. In Proceedings of the 2021 IEEE International Electron Devices Meeting (IEDM), San Francisco, CA, USA, 11–15 December 2021; p. 30. [Google Scholar]
- Innocent, M.; Velichko, S.; Anderson, G.; Beck, J.; Hernandez, A.; Vanhoff, B.; Silsby, C.; Oberoi, A.; Singh, G.; Gurindagunta, S.; et al. Automotive CMOS Image Sensor Family with 2.1 μm LFM Pixel,150 dB Dynamic Range and High Temperature Stability. In Proceedings of the International Image Sensor Workshop (IISW), Scotland, UK, 21–25 May 2023. [Google Scholar]
- Willassen, T.; Solhusvik, J.; Johansson, R.; Yaghmai, S.; Rhodes, H.; Manabe, S.; Mao, D.; Lin, Z.; Yang, D.; Cellek, O.; et al. A 1280 × 1080 4.2 μm split-diode pixel HDR sensor in 110 nm BSI CMOS process. In Proceedings of the International Image Sensor Workshop (IISW), Vaals, The Netherlands, 8–11 June 2015; pp. 377–380. [Google Scholar]
- Sakano, Y.; Toyoshima, T.; Nakamura, R.; Asatsuma, T.; Hattori, Y.; Yamanaka, T.; Yoshikawa, R.; Kawazu, N.; Matsuura, T.; Iinuma, T.; et al. A 132dB Single-Exposure-Dynamic-Range CMOS Image Sensor with High Temperature Tolerance. In Proceedings of the 2020 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 16–20 February 2020; pp. 106–108. [Google Scholar]
- Iida, S.; Sakano, Y.; Asatsuma, T.; Takami, M.; Yoshiba, I.; Ohba, N.; Mizuno, H.; Oka, T.; Yamaguchi, K.; Suzuki, A.; et al. A 0.68e-rms random-noise 121dB dynamic-range sub-pixel architecture CMOS image sensor with LED flicker mitigation. In Proceedings of the 2018 IEEE International Electron Devices Meeting (IEDM), San Francisco, CA, USA, 1–5 December 2018; pp. 221–224. [Google Scholar]
- Oh, Y.; Lim, J.; Park, S.; Yoo, D.; Lim, M.; Park, J.; Kim, S.; Jung, M.; Kim, S.; Lee, J.; et al. A 140 dB Single-Exposure Dynamic-Range CMOS Image Sensor with In-Pixel DRAM Capacitor. In Proceedings of the 2022 IEEE International Electron Devices Meeting (IEDM), San Francisco, CA, USA, 3–7 December 2022; pp. 37.7.1–37.7.4. [Google Scholar]
- Yoo, D.; Jang, Y.; Kim, Y.; Shin, J.; Park, E.; Lee, K.; Park, S.; Shin, S.; Kim, S.; Park, J.; et al. Automotive 2.1μm Full-Depth Deep Trench Isolation CMOS Image Sensor with a Single-Exposure Dynamic-Range of 120 dB. In Proceedings of the International Image Sensor Workshop (IISW), Scotland, UK, 21–25 May 2023. [Google Scholar]
- Solhusvik, J.; Willassent, T.; Mikkelsen, S.; Wilhelmsen, M.; Manabe, S.; Mao, D.; He, Z.; Mabuchi, K.; Hasegawa, T. A 1280 × 960 2.8 µm HDR CIS with DCG and Split-Pixel Combined. In Proceedings of the International Image Sensor Workshop (IISW), Snowbird, UT, USA, 23–27 June 2019; Volume 32, pp. 254–257. [Google Scholar]
- Innocent, M.; Rodriguez, A.; Guruaribam, D.; Rahman, M.; Sulfridge, M.; Borthakur, S.; Gravelle, B.; Goto, T.; Dougherty, N.; Desjardin, B.; et al. Pixel with nested photo diodes and 120 dB single exposure dynamic range. In Proceedings of the International Image Sensor Workshop (IISW), Snowbird, UT, USA, 23–27 May 2019; Volume 13, pp. 95–98. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Priority | Parameter | Unit | RGCGray | RGBGray | RGGB | RGCB |
|---|---|---|---|---|---|---|
 |  |  |  | |||
| 1 | Illuminance saturation for LFM | cd/m2 | 5600 Gray | 5600 Gray | 1060 Blue | 1060 Blue |
| 2 | Sensitivity for low light scene | e−/lux·s | 10,800 Clear | 6500 Green | 6500 Green | 10,800 Clear |
| 3 | Color reproducibility | - | good | best | best | best |
| Parameter | Value | |
|---|---|---|
| Quadrate Pixel | Square Pixel | |
| Power supply | 2.9 V/1.8 V/1.2 V | |
| Process technology | 90 nm 4Cu 1AL CMOS BSI | |
| Pixel pitch | 1.5 μm | 3.0 μm |
| Pixel array | 4.61 M | 1.15 M |
| Color filter | Red, green, clear, gray | Clear |
| Sensitivity ratio | 20 times | non |
| In-pixel capacitor | non | MOS |
| Conversion gain | 81 μV/e | 83 μV/e (PD), 5.7 μV/e (FC) |
| Random noise @RT | 1.4 e−rms | 1.4 e−rms |
| Sensitivity (3200 K with IRCF) | 108,00 e−/lx·s (clear) 550 e−/lx·s (gray) | 40,400 e−/lx·s |
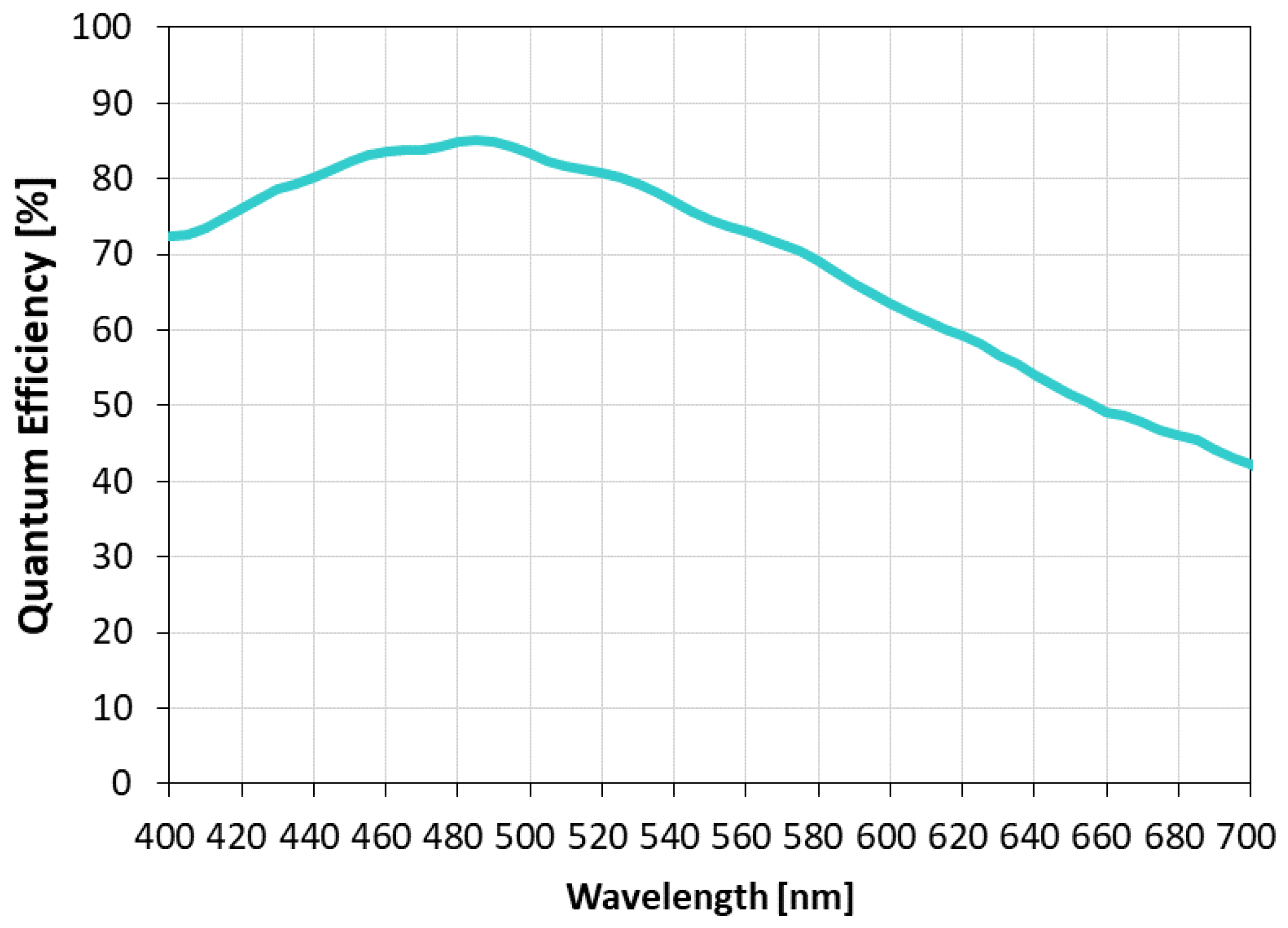
| Quantum efficiency | 82% | 85% |
| Full-well capacity | 9.4 K e− | 1.35 K (PD),280 K e− (FC) |
| Real full-well capacity | 188 Ke− (gray) | 1.35 K (PD),280 K e− (FC) |
| Dynamic range (single exp.) | 103 (gray) dB | 106 dB |
| Parameter | Unit | This Work | IEDM 2021 | ISSCC 2020 | IISW 2019 | ||
|---|---|---|---|---|---|---|---|
| [6] | [9] | [13] | |||||
| Pixel pitch | μm | 3 | 1.5 | 2.1 | 3 | 2.8 | |
| Color | - | Clear | RGCGray | RGGB RCCB | RGGB | RGGB | |
| HDR Technology | Sensitivity ratio | Times | non | 20 | non | 14.5 | 100 |
| In-pixel capacitor | - | MOS | non | MIM | MOS | non | |
| Random noise @RT | e− rms | 1.3 | 1.4 | - | 0.6 | 0.83 | |
| Clear or green sensitivity | e−/lx·s | 40,400 | 10,800 | N/A | 38,000 | 24,600 | |
| Full-well capacity | e− | 250 K | 9.4 K | 600 K | 165.8 K | 7.9 K | |
| Real full-well capacity | e− | 250 K | 188 K | 600 K | 2404 K | 790 K | |
| Dynamic range (single exp.) | dB | 106 | 103 | 110 | 132 | 110 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iida, S.; Kawamata, D.; Sakano, Y.; Yamanaka, T.; Nabeyoshi, S.; Matsuura, T.; Toshida, M.; Baba, M.; Fujimori, N.; Basavalingappa, A.; et al. A 3.0 µm Pixels and 1.5 µm Pixels Combined Complementary Metal-Oxide Semiconductor Image Sensor for High Dynamic Range Vision beyond 106 dB. Sensors 2023, 23, 8998. https://doi.org/10.3390/s23218998
Iida S, Kawamata D, Sakano Y, Yamanaka T, Nabeyoshi S, Matsuura T, Toshida M, Baba M, Fujimori N, Basavalingappa A, et al. A 3.0 µm Pixels and 1.5 µm Pixels Combined Complementary Metal-Oxide Semiconductor Image Sensor for High Dynamic Range Vision beyond 106 dB. Sensors. 2023; 23(21):8998. https://doi.org/10.3390/s23218998
Chicago/Turabian StyleIida, Satoko, Daisuke Kawamata, Yorito Sakano, Takaya Yamanaka, Shohei Nabeyoshi, Tomohiro Matsuura, Masahiro Toshida, Masahiro Baba, Nobuhiko Fujimori, Adarsh Basavalingappa, and et al. 2023. "A 3.0 µm Pixels and 1.5 µm Pixels Combined Complementary Metal-Oxide Semiconductor Image Sensor for High Dynamic Range Vision beyond 106 dB" Sensors 23, no. 21: 8998. https://doi.org/10.3390/s23218998
APA StyleIida, S., Kawamata, D., Sakano, Y., Yamanaka, T., Nabeyoshi, S., Matsuura, T., Toshida, M., Baba, M., Fujimori, N., Basavalingappa, A., Han, S., Katayama, H., & Azami, J. (2023). A 3.0 µm Pixels and 1.5 µm Pixels Combined Complementary Metal-Oxide Semiconductor Image Sensor for High Dynamic Range Vision beyond 106 dB. Sensors, 23(21), 8998. https://doi.org/10.3390/s23218998