
Human Posture Estimation: A Systematic Review on Force-Based Methods—Analyzing the Differences in Required Expertise and Result Benefits for Their Utilization



Abstract
:1. Introduction
- What are the existing input data sources and estimation methods used in studies to estimate human posture based on force data and pressure maps?
- Which human posture estimation methods are used for which types of application scenarios, and what previous expert knowledge is required for their use?
2. Human Posture Estimation
3. Materials and Methods
3.1. Information Sources and Searching Strategy
3.2. Screening Process
- The minimum required input for posture estimation includes data from at least one force sensor, pressure mat or virtual force vector.
- The output of the estimation includes the human posture, e.g., whole-body postures or one or more joint angles.
- Additional sensor inputs are allowed, except human motion data from classical motion capture systems. Classical motion capture systems are only allowed for the evaluation of the results.
3.3. Additional Reports with Non-Standardized Terminology
3.4. Data Analysis
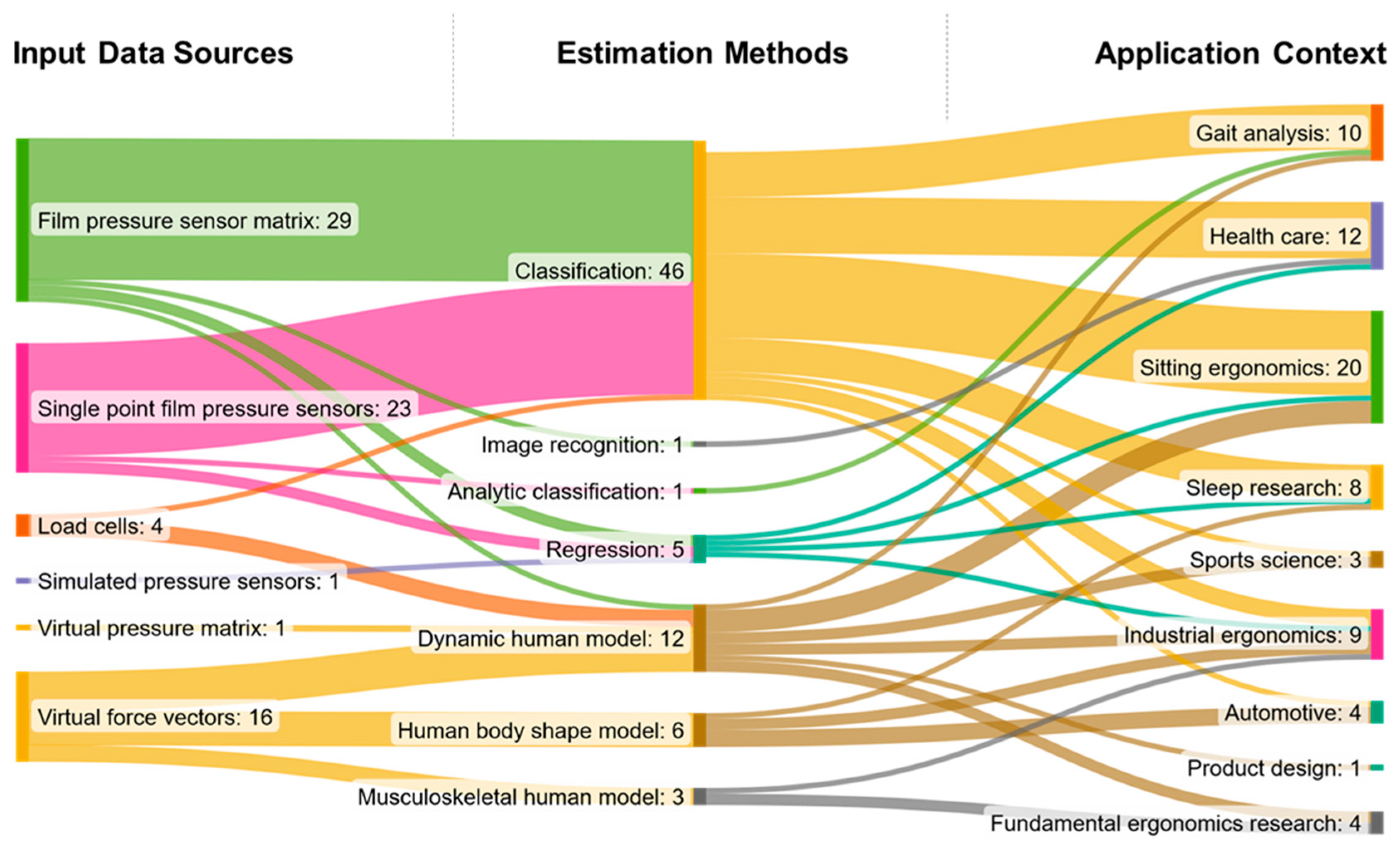
- Input Data Source:The input data source describes the origin of the sensor data or virtual force vector input information used for posture estimation.
- Estimation Method:The estimation method describes the method used to estimate human posture to give an overview of the most relevant methods.
- Application ScenarioThe application describes the scientific domain in which the study was conducted as well as the specific activities the participants performed in the studies.
4. Results
4.1. Input Data Sources and Sensors
4.1.1. Measurement Principles
4.1.2. Sensor Layout
4.1.3. Commercial Hardware Sensors and Self-Designed Hardware Sensors
4.2. Methods and Models for Human Posture Estimation
4.2.1. Machine Learning Methods
- Center of pressure determination;
- Histogram of Oriented Gradients (HOG) analysis;
- Sliding window techniques;
4.2.2. Digital Human Models
4.3. Application Scenarios
4.4. Findings
4.5. Sankey Diagram
4.6. The Novelty and Relevance of Human Posture Estimation
Datailed Information about the Analysed Studies
5. Discussion
- Extracting the used input data sources and estimation methods from the literature.
- Evaluating the types of application scenarios and previous expert knowledge used in the reviewed studies.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hreljac, A. Stride smoothness evaluation of runners and other athletes. Gait Posture 2000, 11, 199–206. [Google Scholar] [CrossRef]
- Ganzevles, S.P.M.; Beek, P.J.; Daanen, H.A.M.; Coolen, B.M.A.; Truijens, M.J. Differences in swimming smoothness between elite and non-elite swimmers. Sports Biomech. 2023, 22, 675–688. [Google Scholar] [CrossRef]
- Asfour, T.; Dillmann, R. Human-like motion of a humanoid robot arm based on a closed-form solution of the inverse kinematics problem. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; pp. 1407–1412, ISBN 0-7803-7860-1. [Google Scholar]
- Beil, J.; Ehrenberger, I.; Scherer, C.; Mandery, C.; Asfour, T. Human Motion Classification Based on Multi-Modal Sensor Data for Lower Limb Exoskeletons. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 5431–5436, ISBN 978-1-5386-8094-0. [Google Scholar]
- Sänger, J.; Yao, Z.; Schubert, T.; Wolf, A.; Molz, C.; Miehling, J.; Wartzack, S.; Gwosch, T.; Matthiesen, S.; Weidner, R. Evaluation of Active Shoulder Exoskeleton Support to Deduce Application-Oriented Optimization Potentials for Overhead Work. Appl. Sci. 2022, 12, 10805. [Google Scholar] [CrossRef]
- Möhler, F.; Fadillioglu, C.; Stein, T. Fatigue-Related Changes in Spatiotemporal Parameters, Joint Kinematics and Leg Stiffness in Expert Runners During a Middle-Distance Run. Front. Sports Act. Living 2021, 3, 634258. [Google Scholar] [CrossRef] [PubMed]
- Shotton, J.; Fitzgibbon, A.; Cook, M.; Sharp, T.; Finocchio, M.; Moore, R.; Kipman, A.; Blake, A. Real-time human pose recognition in parts from single depth images. In Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; Staff, I., Ed.; IEEE: New York, NY, USA, 2011; pp. 1297–1304, ISBN 978-1-4577-0394-2. [Google Scholar]
- Sarafianos, N.; Boteanu, B.; Ionescu, B.; Kakadiaris, I.A. 3D Human pose estimation: A review of the literature and analysis of covariates. Comput. Vis. Image Underst. 2016, 152, 1–20. [Google Scholar] [CrossRef]
- van der Kruk, E.; Reijne, M.M. Accuracy of human motion capture systems for sport applications; state-of-the-art review. Eur. J. Sport Sci. 2018, 18, 806–819. [Google Scholar] [CrossRef] [PubMed]
- Pfister, A.; West, A.M.; Bronner, S.; Noah, J.A. Comparative abilities of Microsoft Kinect and Vicon 3D motion capture for gait analysis. J. Med. Eng. Technol. 2014, 38, 274–280. [Google Scholar] [CrossRef] [PubMed]
- Valero, E.; Sivanathan, A.; Bosché, F.; Abdel-Wahab, M. Analysis of construction trade worker body motions using a wearable and wireless motion sensor network. Autom. Constr. 2017, 83, 48–55. [Google Scholar] [CrossRef]
- Choffin, Z.; Jeong, N.; Callihan, M.; Olmstead, S.; Sazonov, E.; Thakral, S.; Getchell, C.; Lombardi, V. Ankle Angle Prediction Using a Footwear Pressure Sensor and a Machine Learning Technique. Sensors 2021, 21, 3790. [Google Scholar] [CrossRef]
- Grimm, R.; Bauer, S.; Sukkau, J.; Hornegger, J.; Greiner, G. Markerless estimation of patient orientation, posture and pose using range and pressure imaging: For automatic patient setup and scanner initialization in tomographic imaging. Int. J. Comput. Assist. Radiol. Surg. 2012, 7, 921–929. [Google Scholar] [CrossRef]
- Mutlu, B.; Krause, A.; Forlizzi, J.; Guestrin, C.; Hodgins, J. Robust, low-cost, non-intrusive sensing and recognition of seated postures. In Proceedings of the UIST07: 20th Annual ACM Symposium on User Interface Software and Technology, Newport, RI, USA, 7–10 October 2007; Shen, C., Jacob, R., Balakrishnan, R., Eds.; ACM: New York, NY, USA, 2007; pp. 149–158, ISBN 9781595936790. [Google Scholar]
- Matthies, D.J.; Haescher, M.; Chodan, W.; Bieber, G. DIY-PressMat: A Smart Sensor Mat for Posture Detection Applicable for Bed-exit Intention Detection, Pressure Ulcer Prevention, and Sleep Apnea Mitigation. In Proceedings of the PETRA’21: The 14th PErvasive Technologies Related to Assistive Environments Conference, Corfu, Greece, 29 June–2 July 2021; Makedon, F., Ed.; Association for Computing Machinery: New York, NY, USA, 2021; pp. 76–80, ISBN 9781450387927. [Google Scholar]
- Roh, J.; Park, H.-J.; Lee, K.J.; Hyeong, J.; Kim, S.; Lee, B. Sitting Posture Monitoring System Based on a Low-Cost Load Cell Using Machine Learning. Sensors 2018, 18, 208. [Google Scholar] [CrossRef] [PubMed]
- Ding, M.; Nagashima, M.; Cho, S.-G.; Takamatsu, J.; Ogasawara, T. Control of Walking Assist Exoskeleton with Time-delay Based on the Prediction of Plantar Force. IEEE Access 2020, 8, 138642–138651. [Google Scholar] [CrossRef]
- CHEN, Y.; Fu, C.; Leung, S.W.W.; Shi, L. Drift-Free and Self-Aligned IMU-based Human Gait Tracking System with Augmented Precision and Robustness. IEEE Robot. Autom. Lett. 2020, 5, 4671–4678. [Google Scholar] [CrossRef]
- Valldeperes, A.; Altuna, X.; Martinez-Basterra, Z.; Rossi-Izquierdo, M.; Benitez-Rosario, J.; Perez-Fernandez, N.; Rey-Martinez, J. Wireless inertial measurement unit (IMU)-based posturography. Eur. Arch. Otorhinolaryngol. 2019, 276, 3057–3065. [Google Scholar] [CrossRef] [PubMed]
- Shen, S.; Wang, H.; Roy Choudhury, R. I am a Smartwatch and I can Track my User’s Arm. In MobiSys’16: The 14th Annual International Conference on Mobile Systems, Applications, and Services, Singapore, 26–30 June 2016; Balan, R., Ed.; ACM: New York, NY, USA, 2016; pp. 85–96. ISBN 9781450342698. [Google Scholar]
- Aminosharieh Najafi, T.; Abramo, A.; Kyamakya, K.; Affanni, A. Development of a Smart Chair Sensors System and Classification of Sitting Postures with Deep Learning Algorithms. Sensors 2022, 22, 5585. [Google Scholar] [CrossRef] [PubMed]
- Ma, C.; Li, W.; Gravina, R.; Fortino, G. Posture Detection Based on Smart Cushion for Wheelchair Users. Sensors 2017, 17, 719. [Google Scholar] [CrossRef] [PubMed]
- Iso, T.; Yamazaki, K. Gait analyzer based on a cell phone with a single three-axis accelerometer. In Proceedings of the 8th Conference on Human-Computer Interaction with Mobile Devices and Services, MobileHCI06: Human-Computer Interaction with Mobile Devices and Services, Helsinki, Finland, 12–15 September 2006; Nieminen, M., Ed.; ACM: New York, NY, USA, 2006; pp. 141–144, ISBN 1595933905. [Google Scholar]
- Shen, S. Arm Posture Tracking Using a Smartwatch. In Proceedings of the MobiSys’16: The 14th Annual International Conference on Mobile Systems, Applications, and Services, Singapore, 26 June 2016; LiKamWa, R., Ed.; ACM: New York, NY, USA, 2016; pp. 9–10, ISBN 9781450343312. [Google Scholar]
- Brancaleone, M.P.; Ballance, C.J.; Clifton, D.R.; Talarico, M.K.; Onate, J.A. The Effectiveness of Inertial Sensors to Assess Static Postural Stability in Individuals with Concussion: A Systematic Review. Athl. Train. Sports Health Care 2019, 11, 243–248. [Google Scholar] [CrossRef]
- Ben Gamra, M.; Akhloufi, M.A. A review of deep learning techniques for 2D and 3D human pose estimation. Image Vis. Comput. 2021, 114, 104282. [Google Scholar] [CrossRef]
- Zhang, D.; Wu, Y.; Guo, M.; Chen, Y. Deep Learning Methods for 3D Human Pose Estimation under Different Supervision Paradigms: A Survey. Electronics 2021, 10, 2267. [Google Scholar] [CrossRef]
- Wang, J.; Tan, S.; Zhen, X.; Xu, S.; Zheng, F.; He, Z.; Shao, L. Deep 3D human pose estimation: A review. Comput. Vis. Image Underst. 2021, 210, 103225. [Google Scholar] [CrossRef]
- Goldstein, B.; Huang, I.; Bajcsy, R. Real-Time Slouch Detection and Human Posture Prediction from Pressure Mat. In Proceedings of the HCI International 2020–Posters, 22nd International Conference, HCII 2020, Copenhagen, Denmark, 19–24 July 2020; Stephanidis, C., Antona, M., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 174–180, ISBN 978-3-030-50728-2. [Google Scholar]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. Syst. Rev. 2021, 10, 89. [Google Scholar] [CrossRef] [PubMed]
- Page, M.J.; Moher, D.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. PRISMA 2020 explanation and elaboration: Updated guidance and exemplars for reporting systematic reviews. BMJ 2021, 372, n160. [Google Scholar] [CrossRef] [PubMed]
- Ngueleu, A.M.; Blanchette, A.K.; Maltais, D.; Moffet, H.; McFadyen, B.J.; Bouyer, L.; Batcho, C.S. Validity of Instrumented Insoles for Step Counting, Posture and Activity Recognition: A Systematic Review. Sensors 2019, 19, 2438. [Google Scholar] [CrossRef] [PubMed]
- Giovanelli, D.; Farella, E. Force Sensing Resistor and Evaluation of Technology for Wearable Body Pressure Sensing. J. Sens. 2016, 2016, 9391850. [Google Scholar] [CrossRef]
- Zhao, M.; Beurier, G.; Wang, H.; Wang, X. Driver posture monitoring in highly automated vehicles using pressure measurement. Traffic Inj. Prev. 2021, 22, 278–283. [Google Scholar] [CrossRef] [PubMed]
- Hu, Q.; Tang, X.; Tang, W. A Real-Time Patient-Specific Sleeping Posture Recognition System Using Pressure Sensitive Conductive Sheet and Transfer Learning. IEEE Sens. J. 2021, 21, 6869–6879. [Google Scholar] [CrossRef]
- Kokai, O.; Kilbreath, S.L.; McLaughlin, P.; Dylke, E.S. The accuracy and precision of interface pressure measuring devices: A systematic review. Phlebology 2021, 36, 678–694. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liu, F.; Trkov, M.; Yi, J. Rider/bicycle pose estimation with IMU/seat force measurements. In Proceedings of the 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Kaohsiung, Taiwan, 11–14 July 2012; pp. 604–609, ISBN 978-1-4673-2576-9. [Google Scholar]
- Almassri, A.M.; Wan Hasan, W.Z.; Ahmad, S.A.; Ishak, A.J.; Ghazali, A.M.; Talib, D.N.; Wada, C. Pressure Sensor: State of the Art, Design, and Application for Robotic Hand. J. Sens. 2015, 2015, 846487. [Google Scholar] [CrossRef]
- Cruz-Santos, W.; Beltran-Herrera, A.; Vazquez-Santacruz, E.; Gamboa-Zuniga, M. Posture classification of lying down human bodies based on pressure sensors array. In Proceedings of the 2014 International Joint Conference on Neural Networks (IJCNN), Beijing, China, 6–11 July 2014; pp. 533–537, ISBN 978-1-4799-1484-5. [Google Scholar]
- Djamaa, B.; Bessa, M.M.; Diaf, B.; Rouigueb, A.; Yachir, A. BoostSole: Design and Realization of a Smart Insole for Automatic Human Gait Classification. In Proceedings of the 2020 Federated Conference on Computer Science and Information Systems, 6–9 September 2020; pp. 35–43. [Google Scholar]
- Merry, K.J.; Macdonald, E.; MacPherson, M.; Aziz, O.; Park, E.; Ryan, M.; Sparrey, C.J. Classifying sitting, standing, and walking using plantar force data. Med. Biol. Eng. Comput. 2021, 59, 257–270. [Google Scholar] [CrossRef]
- Yang, J.; Pitarch, E.P.; Kim, J.; Abdel-Malek, K. Posture Prediction and Force/Torque Analysis for Human Hands. In Proceedings of the 2006 Digital Human Modeling for Design and Engineering Conference, Lyon, France, 4 July 2006; SAE Technical Paper Series. SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2006. [Google Scholar]
- Milovic, M.; Farías, G.; Fingerhuth, S.; Pizarro, F.; Hermosilla, G.; Yunge, D. Detection of Human Gait Phases Using Textile Pressure Sensors: A Low Cost and Pervasive Approach. Sensors 2022, 22, 2825. [Google Scholar] [CrossRef]
- Meyer, J.; Arnrich, B.; Schumm, J.; Troster, G. Design and Modeling of a Textile Pressure Sensor for Sitting Posture Classification. IEEE Sens. J. 2010, 10, 1391–1398. [Google Scholar] [CrossRef]
- Diao, H.; Chen, C.; Yuan, W.; Amara, A.; Tamura, T.; Fan, J.; Meng, L.; Liu, X.; Chen, W. Deep Residual Networks for Sleep Posture Recognition with Unobtrusive Miniature Scale Smart Mat System. IEEE Trans. Biomed. Circuits Syst. 2021, 15, 111–121. [Google Scholar] [CrossRef] [PubMed]
- Beltrán-Herrera, A.; Vázquez-Santacruz, E.; Gamboa-Zuñiga, M. Real-Time Classification of Lying Bodies by HOG Descriptors. In Pattern Recognition; Martínez-Trinidad, J.F., Carrasco-Ochoa, J.A., Olvera-Lopez, J.A., Salas-Rodríguez, J., Suen, C.Y., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 211–220. ISBN 978-3-319-07490-0. [Google Scholar]
- Grimm, R.; Sukkau, J.; Hornegger, J.; Greiner, G. Automatic Patient Pose Estimation Using Pressure Sensing Mattresses. In Bildverarbeitung für die Medizin 2011; Handels, H., Ehrhardt, J., Deserno, T.M., Meinzer, H.-P., Tolxdorff, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 409–413. ISBN 978-3-642-19334-7. [Google Scholar]
- Rihar, A.; Mihelj, M.; Pašič, J.; Kolar, J.; Munih, M. Infant trunk posture and arm movement assessment using pressure mattress, inertial and magnetic measurement units (IMUs). J. Neuroeng. Rehabil. 2014, 11, 133. [Google Scholar] [CrossRef] [PubMed]
- Clever, H.M.; Erickson, Z.; Kapusta, A.; Turk, G.; Liu, C.K.; Kemp, C.C. Bodies at Rest: 3D Human Pose and Shape Estimation from a Pressure Image Using Synthetic Data. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 6214–6223, ISBN 978-1-7281-7168-5. [Google Scholar]
- Antwi-Afari, M.F.; Li, H.; Yu, Y.; Kong, L. Wearable insole pressure system for automated detection and classification of awkward working postures in construction workers. Autom. Constr. 2018, 96, 433–441. [Google Scholar] [CrossRef]
- Sazonov, E.S.; Fulk, G.; Hill, J.; Schutz, Y.; Browning, R. Monitoring of posture allocations and activities by a shoe-based wearable sensor. IEEE Trans. Biomed. Eng. 2011, 58, 983–990. [Google Scholar] [CrossRef] [PubMed]
- Sazonov, E.; Hegde, N.; Browning, R.C.; Melanson, E.L.; Sazonova, N.A. Posture and activity recognition and energy expenditure estimation in a wearable platform. IEEE J. Biomed. Health Inform. 2015, 19, 1339–1346. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, J.; Sidén, J.; Andersson, H. A Proposal of Implementation of Sitting Posture Monitoring System for Wheelchair Utilizing Machine Learning Methods. Sensors 2021, 21, 6349. [Google Scholar] [CrossRef] [PubMed]
- Cun, W.; Mo, R.; Chu, J.; Yu, S.; Zhang, H.; Fan, H.; Chen, Y.; Wang, M.; Wang, H.; Chen, C. Sitting posture detection and recognition of aircraft passengers using machine learning. AIEDAM 2021, 35, 284–294. [Google Scholar] [CrossRef]
- Diao, H.; Chen, C.; Chen, W.; Yuan, W.; Amara, A. Unobtrusive Smart Mat System for Sleep Posture Recognition. In Smart Technology for an Intelligent Society, Proceedings of the 2021 IEEE International Symposium on Circuits and Systems (ISCAS), Daegu, Republic of Korea, 22–28 May 2021; Park, S., Han, J.-H., Eds.; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. ISBN 978-1-7281-9201-7. [Google Scholar]
- Fulk, G.D.; Sazonov, E. Using sensors to measure activity in people with stroke. Top. Stroke Rehabil. 2011, 18, 746–757. [Google Scholar] [CrossRef]
- Gelaw, T.A.; Hagos, M.T. Posture Prediction for Healthy Sitting Using a Smart Chair. In Proceedings of the Advances of Science and Technology: 9th EAI International Conference, ICAST 2021, Hybrid Event, Bahir Dar, Ethiopia, 27–29 August 2021, Proceedings, Part I, 1st ed.; Berihun, M.L., Ed.; Springer: Cham, Switzerland, 2022; pp. 401–411. ISBN 978-3-030-93708-9. [Google Scholar]
- Hsia, C.C.; Liou, K.J.; Aung, A.P.W.; Foo, V.; Huang, W.; Biswas, J. Analysis and comparison of sleeping posture classification methods using pressure sensitive bed system. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2009, 2009, 6131–6134. [Google Scholar] [CrossRef]
- Yin, Z.; Zheng, J.; Huang, L.; Gao, Y.; Peng, H.; Yin, L. SA-SVM-Based Locomotion Pattern Recognition for Exoskeleton Robot. Appl. Sci. 2021, 11, 5573. [Google Scholar] [CrossRef]
- Zemp, R.; Tanadini, M.; Plüss, S.; Schnüriger, K.; Singh, N.B.; Taylor, W.R.; Lorenzetti, S.; Cai, Y. Application of Machine Learning Approaches for Classifying Sitting Posture Based on Force and Acceleration Sensors. BioMed Res. Int. 2016, 2016, 5978489. [Google Scholar] [CrossRef] [PubMed]
- Casas, L.; Mürwald, C.; Achilles, F.; Mateus, D.; Huber, D.; Navab, N.; Demirci, S. Human Pose Estimation from Pressure Sensor Data. In Bildverarbeitung für die Medizin 2018; Maier, A., Deserno, T.M., Handels, H., Maier-Hein, K.H., Palm, C., Tolxdorff, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 285–290. ISBN 978-3-662-56536-0. [Google Scholar]
- Jeong, H.; Park, W. Developing and Evaluating a Mixed Sensor Smart Chair System for Real-Time Posture Classification: Combining Pressure and Distance Sensors. IEEE J. Biomed. Health Inform. 2021, 25, 1805–1813. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Liu, Z.; Cai, L.; Yan, J. Human standing posture recognition based on CNN and pressure floor. JCM 2020, 20, 489–498. [Google Scholar] [CrossRef]
- Yousefi, R.; Ostadabbas, S.; Faezipour, M.; Farshbaf, M.; Nourani, M.; Tamil, L.; Pompeo, M. Bed posture classification for pressure ulcer prevention. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2011, 2011, 7175–7178. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Liu, D.; Wang, Q.; Zhao, B.; Bai, O.; Sun, J. Gait Pattern Recognition Based on Plantar Pressure Signals and Acceleration Signals. IEEE Trans. Instrum. Meas. 2022, 71, 4008415. [Google Scholar] [CrossRef]
- Gao, H.; Wei, D.; Yang, F. Recognition of Human Sleep Pressure Posture Image Using Deep Residual Networks. In Proceedings of the 2022 4th International Conference on Communications, Information System and Computer Engineering (CISCE), Shenzhen, China, 27–29 May 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 164–169, ISBN 978-1-6654-9848-7. [Google Scholar]
- Bhatt, A.; Truong, T.; Yanushkevich, S.; Almekhlafi, M. Body Pose Analysis using CNN and Pressure Sensor Array Data. In Proceedings of the 2021 IEEE EMBS International Conference on Biomedical and Health Informatics (BHI), Athens, Greece, 27–30 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–4, ISBN 978-1-6654-0358-0. [Google Scholar]
- He, Z.; Cheng, S.; Zheng, H. Optimizing sitting recognition models using preprocessing methods and improved ResNet. In Proceedings of the Third International Conference on Artificial Intelligence and Electromechanical Automation (AIEA 2022), Changsha, China, 8–10 April 2022; Yang, S., Wu, G., Eds.; SPIE: Bellingham, WA, USA, 2022; p. 11, ISBN 9781510657281. [Google Scholar]
- Lee, Y.; Kim, Y.M.; Pyo, S.; Yun, M.H. Development of a sitting posture monitoring system for children using pressure sensors: An application of convolutional neural network. Work 2022, 72, 351–366. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, X.; SU, M.; Lu, K. A Method to Recognize Sleeping Position Using an CNN Model Based on Human Body Pressure Image. In Proceedings of the 2019 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 12–14 July 2019; 2019; pp. 219–224, ISBN 978-1-7281-3720-9. [Google Scholar]
- Rodríguez, A.P.; Gil, D.; Nugent, C.; Quero, J.M. In-Bed Posture Classification from Pressure Mat Sensors for the Prevention of Pressure Ulcers Using Convolutional Neural Networks. In Bioinformatics and Biomedical Engineering; Rojas, I., Valenzuela, O., Rojas, F., Herrera, L.J., Ortuño, F., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 338–349. ISBN 978-3-030-45384-8. [Google Scholar]
- Seo, J.-Y.; Lee, J.-S.; Jung, S.-J.; Noh, Y.-H.; Jeong, D.-U. Implementation of CNN Model for Classification of User Sitting Posture Based on Pressure Distribution. In Intelligent Human Computer Interaction; Singh, M., Kang, D.-K., Lee, J.-H., Tiwary, U.S., Singh, D., Chung, W.-Y., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 154–159. ISBN 978-3-030-68451-8. [Google Scholar]
- Bourahmoune, K.; Ishac, K.; Amagasa, T. Intelligent Posture Training: Machine-Learning-Powered Human Sitting Posture Recognition Based on a Pressure-Sensing IoT Cushion. Sensors 2022, 22, 5337. [Google Scholar] [CrossRef]
- Zhao, M.; Beurier, G.; Wang, H.; Wang, X. Exploration of Driver Posture Monitoring Using Pressure Sensors with Lower Resolution. Sensors 2021, 21, 3346. [Google Scholar] [CrossRef]
- Demirel, H.O.; Ahmed, S.; Duffy, V.G. Digital Human Modeling: A Review and Reappraisal of Origins, Present, and Expected Future Methods for Representing Humans Computationally. Int. J. Hum.–Comput. Interact. 2022, 38, 897–937. [Google Scholar] [CrossRef]
- Choi, H.; Park, S. Three Dimensional Upper Limb Joint Kinetics of a Golf Swing with Measured Internal Grip Force. Sensors 2020, 20, 3672. [Google Scholar] [CrossRef] [PubMed]
- Marler, T.; Knake, L.; Johnson, R. Optimization-Based Posture Prediction for Analysis of Box Lifting Tasks. In Digital Human Modeling; Duffy, V.G., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 151–160. ISBN 978-3-642-21798-2. [Google Scholar]
- Rahmati, S.M.A.; Mallakzadeh, M. Prediction of weightlifters’ motor behavior to evaluate snatch weightlifting techniques based on a new method of investigation of consumed energy. Hum. Mov. Sci. 2014, 38, 58–73. [Google Scholar] [CrossRef] [PubMed]
- Davoudabadi Farahani, S.; Andersen, M.S.; de Zee, M.; Rasmussen, J. Human arm posture prediction in response to isometric endpoint forces. J. Biomech. 2015, 48, 4178–4184. [Google Scholar] [CrossRef] [PubMed]
- Nakajima, T.; Asami, Y.; Endo, Y.; Tada, M.; Ogihara, N. Prediction of anatomically and biomechanically feasible precision grip posture of the human hand based on minimization of muscle effort. Sci. Rep. 2022, 12, 13247. [Google Scholar] [CrossRef] [PubMed]
- Ramdani, N.; Pages, G.; Fraisse, P.; Guiraud, D. Human upper body posture estimation from forces exerted on handles. In Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006; pp. 410–415, ISBN 1-4244-0570-X. [Google Scholar]
- Barman, S.; Xiang, Y.; Rakshit, R.; Yang, J. Joint fatigue-based optimal posture prediction for maximizing endurance time in box carrying task. Multibody Syst. Dyn. 2022, 55, 323–339. [Google Scholar] [CrossRef]
- Kremser, F.; Guenzkofer, F.; Bengler, K. User-centred interior design of a small electric vehicle using RAMSIS. IJHFMS 2012, 3, 329. [Google Scholar] [CrossRef]
- Liu, Q.; Marler, T.; Yang, J.; Kim, J.H. Posture Prediction with External Loads—A Pilot Study. SAE Int. J. Passeng. Cars–Mech. Syst. 2009, 2, 1014–1023. [Google Scholar] [CrossRef]
- Kwon, H.-J.; Chung, H.-J.; Xiang, Y. Human Gait Prediction with a High DOF Upper Body: A Multi-Objective Optimization of Discomfort and Energy Cost. Int. J. Human. Robot. 2017, 14, 1650025. [Google Scholar] [CrossRef]
- Potash, Z.; Harari, Y.; Riemer, R. Effect of using real motion versus predicted motion as input for digital human modeling of back and shoulder loads during manual material handling. Appl. Ergon. 2022, 101, 103675. [Google Scholar] [CrossRef]
- Seitz, T.; Recluta, D.; Zimmermann, D.; Wirsching, H.-J. FOCOPP—An Approach for a Human Posture Prediction Model Using Internal/External Forces and Discomfort. In Proceedings of the 2005 Digital Human Modeling for Design and Engineering Symposium, Iowa City, IA, USA, 14–16 June 2005; SAE Technical Paper Series. SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2005. [Google Scholar]
- Rothaug, H. Combined Force-Posture Model for Predicting Human Postures and Motion by Using the Ramsis Human Model. In Proceedings of the Digital Human Modeling for Design and Engineering Conference and Exposition, Lyon, France, 4–6 June 2000; SAE Technical Paper Series. SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2000. [Google Scholar]
- Lu, M.-L.; Waters, T.; Werren, D.; Piacitelli, L. Human posture simulation to assess cumulative spinal load due to manual lifting. Part II: Accuracy and precision. Theor. Issues Ergon. Sci. 2011, 12, 189–203. [Google Scholar] [CrossRef]
- Wirsching, H.-J.; Engstler, F. New enhancements and validation of force based posture and discomfort predictions. Work 2012, 41 (Suppl. S1), 2232–2237. [Google Scholar] [CrossRef]
- Adami, A.M.; Adami, A.G.; Hayes, T.L.; Beattie, Z.T. Using load cells under the bed as a non-contact method for detecting periodic leg movements. IRBM 2014, 35, 334–340. [Google Scholar] [CrossRef]
- Adami, A.M.; Pavel, M.; Hayes, T.L.; Adami, A.G.; Singer, C. A method for classification of movements in bed. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2011, 2011, 7881–7884. [Google Scholar] [CrossRef] [PubMed]
- Clever, H.M.; Kapusta, A.; Park, D.; Erickson, Z.; Chitalia, Y.; Kemp, C.C. 3D Human Pose Estimation on a Configurable Bed from a Pressure Image. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 54–61, ISBN 978-1-5386-8094-0. [Google Scholar]
- Wu, F.; Li, X.; Zhao, W.; Ning, B. Gait Recognition Based on the Plantar Pressure Data of Ice and Snow Athletes. Comput. Intell. Neurosci. 2022, 2022, 2982894. [Google Scholar] [CrossRef] [PubMed]
- Antwi-Afari, M.F.; Qarout, Y.; Herzallah, R.; Anwer, S.; Umer, W.; Zhang, Y.; Manu, P. Deep learning-based network for automated recognition and classification of awkward working postures in construction using wearable insole sensor data. Autom. Constr. 2022, 136, 104181. [Google Scholar] [CrossRef]
- Li, G.; Liu, Z.; Cai, L.; Yan, J. Standing-Posture Recognition in Human-Robot Collaboration Based on Deep Learning and the Dempster-Shafer Evidence Theory. Sensors 2020, 20, 1158. [Google Scholar] [CrossRef]
- Tsutsui, T.; Tsutsui, Y.; Tsukamoto, M.; Nakamura, E. Validation of foot plantar pressure sensor data used to estimate standing, sitting, and moving durations in one working day. J. Orthop. Sci. 2023, 28, 217–221. [Google Scholar] [CrossRef] [PubMed]
- Howard, B.; Yang, J.J. Optimization-Based Seated Posture Prediction Considering Contact with Environment. In Volume 2: 31st Computers and Information in Engineering Conference, Parts A and B, Proceedings of the ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Washington, DC, USA, 28–31 August 2011; ASMEDC: Washington, DC, USA; pp. 557–566. ISBN 978-0-7918-5479-2.
- Mao, A.; Zhang, H.; Xie, Z.; Yu, M.; Liu, Y.-J.; He, Y. Automatic Sitting Pose Generation for Ergonomic Ratings of Chairs. IEEE Trans. Vis. Comput. Graph. 2021, 27, 1890–1903. [Google Scholar] [CrossRef]
- van Geffen, P.; Veltink, P.H.; Koopman, B.F.J.M. Can pelvis angle be monitored from seat support forces in healthy subjects? J. Biomech. Eng. 2009, 131, 34502. [Google Scholar] [CrossRef]
- Zou, Q.; Zhang, Q.; Yang, J.; Boothby, R.; Gragg, J.; Cloutier, A. An Alternative Formulation for Determining Weights of Joint Displacement Objective Function in Seated Posture Prediction. In Digital Human Modeling; Duffy, V.G., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 231–242. ISBN 978-3-642-21798-2. [Google Scholar]
- Tam, W.-K.; Wang, A.; Wang, B.; Yang, Z. Lower-body posture estimation with a wireless smart insole. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2019, 2019, 3348–3351. [Google Scholar] [CrossRef]
- Diao, H.; Chen, C.; Liu, X.; Yuan, W.; Amara, A.; Tamura, T.; Lo, B.; Fan, J.; Meng, L.; Pun, S.H.; et al. Real-Time and Cost-Effective Smart Mat System Based on Frequency Channel Selection for Sleep Posture Recognition in IoMT. IEEE Internet Things J. 2022, 9, 21421–21431. [Google Scholar] [CrossRef]
- Feng, G.; Mai, J.; Ban, Z.; Guo, X.; Wang, G. Floor Pressure Imaging for Fall Detection with Fiber-Optic Sensors. IEEE Pervasive Comput. 2016, 15, 40–47. [Google Scholar] [CrossRef]
- Harada, T.; Sato, T.; Mori, T. Estimation of bed-ridden human’s gross and slight movement based on pressure sensors distribution bed. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; pp. 3795–3800, ISBN 0-7803-7272-7. [Google Scholar]
- Matar, G.; Lina, J.-M.; Kaddoum, G. Artificial Neural Network for in-Bed Posture Classification Using Bed-Sheet Pressure Sensors. IEEE J. Biomed. Health Inform. 2020, 24, 101–110. [Google Scholar] [CrossRef] [PubMed]
- Tang, W.; Sazonov, E.S. Highly accurate classification of postures and activities by a shoe-based monitor through classification with rejection. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2012, 2012, 2611–2614. [Google Scholar] [CrossRef] [PubMed]
- Tang, W.; Sazonov, E.S. Highly accurate recognition of human postures and activities through classification with rejection. IEEE J. Biomed. Health Inform. 2014, 18, 309–315. [Google Scholar] [CrossRef] [PubMed]
- Tessendorf, B.; Arnrich, B.; Schumm, J.; Setz, C.; Troster, G. Unsupervised monitoring of sitting behavior. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2009, 2009, 6197–6200. [Google Scholar] [CrossRef] [PubMed]
- Davoudabadi Farahani, S.; Svinin, M.; Andersen, M.S.; de Zee, M.; Rasmussen, J. Prediction of closed-chain human arm dynamics in a crank-rotation task. J. Biomech. 2016, 49, 2684–2693. [Google Scholar] [CrossRef] [PubMed]
- Salehi, H.; Ren, L.; Howard, D. A fast inverse dynamics model of walking for use in optimisation studies. Comput. Methods Biomech. Biomed. Engin. 2016, 19, 1201–1209. [Google Scholar] [CrossRef]
- Kabadayi, S.; Pridgen, A.; Julien, C. Virtual Sensors: Abstracting Data from Physical Sensors. In Proceedings of the 2006 International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM’06), Buffalo-Niagara Falls, NY, USA, 26–29 June 2006; IEEE Computer Society: Los Alamitos, CA, USA, 2006; pp. 587–592, ISBN 0-7695-2593-8. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Human | Posture | Estimation | Force | Method |
|---|---|---|---|---|
| pose | prediction | pressure | model | |
| classification | load | |||
| recognition | weight |
| Application Scenario | Positioning of Single-Point Sensors | Layout of Sensor Matrix |
|---|---|---|
| Sensor mattress (health care + sleep research) |  DIY sensor mattress with capacitive single-point sensors [15] |  Commercial piezorestive sensor matrix on a sleeping matrix [39] (Reprinted with permission from [39], 2023 IEEE Xplore) |
| Sensor insoles (gait analysis + sport science) | 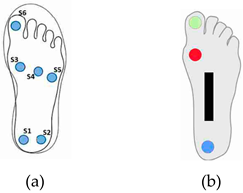 Placement of single-point FSR sensors (circles) at an insole with (a) 6 FSR sensors [12] and (b) 3 FSR sensors and 1 bend sensor (black rectangle) [40] (Reprinted with permission from [12], 2023 MDPI, and [40], 2023 IEE Xplore) | 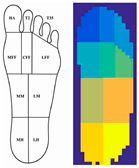 Sensor layout of an F-Scan insole sensor matrix with 954 measure points [41] (Reprinted with permission from [41], 2023 Spriger) |
| Sensor chair (sitting ergonomics + automotive design) |  Positions of DIY single-point sensors on a smart chair [14] |  Application of two Tekscan Conformat sensors on an office chair [14] |
| Classification Algorithm | Classification Accuracy | Feature Extraction Methods | Relevant Studies |
|---|---|---|---|
| Support vector machine (SVM) | 70% [34]–99.79% [50] | Raw data [51], statistics [50,52], sliding window [40,50], HOG [39,46] | [14,16,22,34,39,40,41,46,50,51,52,53,54,55,56,57,58,59,60] |
| K-nearest neighbor (kNN) | 78% [34]–98.52% [22] | Raw data [61,62], statistics [50], sliding window [50] | [13,22,34,40,41,47,50,54,55,61,62,63,64,65] used for regression: [12] |
| Convolutional Neural Networks (CNNs) | 84.80% [21]–99.84% [66] | Mostly automated feature extraction by CNN network | [21,29,35,63,66,67,68,69,70,71,72] used for regression: [29,49] |
| Random forest (RF) | 52.2% [34]–100% [40] | Sliding window [40], statistics [60] | [34,40,53,54,57,60,63,73,74] |
| Naïve Bayes (NB) | 40.09% [22]–84.33% [16] | Mostly filtered raw data | [16,22,34,44,54,63,73] |
| Decision Tree (DT) | 76.79% [16]–98.10% [50] | Statistics [50] Sliding window [41,50] | [16,41,50,53,54,63,73] |
| Optimization Criterium | Digital Human Models | Relevant Studies |
|---|---|---|
| Reduction in joint torque | 3D dynamic human model | [76,77,78] |
| Reduction in muscle effort | Musculoskeletal human model | [79,80] |
| Hypothesis of quasi-static equilibrium | Dynamic human model | [81] |
| Reduction in joint fatigue | 2D three-compartment controller fatigue model | [82] |
| Author | Year | Input Data Source | Estimation Algorithm | Estimation Performance | Data Pre-Processing/Feature Extraction | Application Scenarios |
|---|---|---|---|---|---|---|
| Adami et al. [92] | 2011 | Single-point film pressure sensors: AG100 C3SH5eF (Scaime™, Juvigny, France) | Classification: Gaussian mixture models | Classification rates for individual subjects: from 76.7% to 95.3% Over all classification rate: up to 84.6% | Data pre-processing: Analysis of the trajectory of the body’s center of mass Feature extraction: (1) the Euclidean distance between initial and end points of the trajectory (2) the trajectory length and (3) the variance of the trajectory in the y-direction perpendicular to the sleeper’s body axis | Sleep research: Classification of the movement type lying in a bed |
| Adami et al. [91] | 2014 | Single-point film pressure sensors: 6 AG100C3SH5eU (Scaime™, Juvigny, France) | Classification: Linear discriminant function | Classification rate: 96.9% Spearman’s correlation coefficient between the periodic leg movement indexes estimated by the system and those obtained from a polysomnogram is 0.927 | Data pre-processing: trajectory of the center of pressure (CoP) Feature extraction: (1) the Euclidean distance between initial and end points of the trajectory (2) the trajectory length, and (3) the variance of the trajectory in the y-direction perpendicular to the sleeper’s body axis. | Sleep research: Detection of periodic limb movement events |
| Ahmad et al. [53] | 2021 | Single-point film pressure sensors: Large-area screen-printed sensor (16 pressure-sensing elements, covering an effective sitting area of 505 cm2 | Classification: k-nearest neighbors (kNN), support vector machine (SVM), random forest (RF), decision tree (DT) and light gradient boosting machine (LightGBM) | Classification accuracy: kNN: 98.27% RF: 98.07% SVM: 95.00% DT: 97.81% LightGBM: 99.03% | - | Sitting ergonomics: Identification of sitting posture abnormalities on a wheelchair |
| Aminosharieh Najafi et al. [21] | 2022 | Single-point film pressure sensors: 8 force-sensing resistors (FSRs, unspecified) | Classification: Feedforward artificial neural network, multilayer perceptron (MLP), convolutional neural network (CNN), bidirectional long short-term memory (Bi-LSTM), CNN-LSTM (CNLSTM), convolutional LSTM (CVLSTM), and echo memory network (EMN) | Classification accuracy: MLP: 90.83% CNN: 86.99% LSTM: 88.71% BDLSTM: 88.98% CNLSTM: 89.14% CVLSTM: 89.97% EMN: 91.68% | Data pre-processing: Smoothing motion raw data using Savitzky–Golay filter | Sitting ergonomics: Classification of sitting postures |
| Antwi-Afari et al. [50] | 2018 | Film pressure sensor matrix: Wearable insoles ”OpenGo” (Moticon GmbH, Munich, Germany), 3D MEMS-accelerometer (BMA 150, Bosch Sensortech GmbH, Reutlingen, Germany) | Classification: Artificial neural network (ANN), decision tree (DT), K-nearest neighbor (kNN), and support vector machine (SVM) | Classification accuracy (10-fold cross-validation): ANN: 97.60% DT: 98.10% KNN 98.60% SVM: 99.79% | Data pre-processing: Sliding window segmentation (0.32 s) with 50% data overlap Time-domain features: (1) Mean pressure; (2) Variance; (3) Maximum pressure; (4) Minimum pressure; (5) Range; (6) Standard deviation Frequency-domain features: (1) Spectral energy (2) Entropy Spatial temporal features: (1) Pressure time integral | Industrial ergonomics: Classification of awkward working positions |
| Antwi-Afari et al. [95] | 2022 | Film pressure sensor matrix: Wearable insoles ”OpenGo” (Moticon GmbH, Munich, Germany), 3-axis gyroscope (MEMS LSM6DSL, ST Microelectronics, Plan-les-Ouates, Swiss) | Classification: RNN-based deep learning models: long short-term memory (LSTM), Bi-LSTM, and gated recurrent units (GRU) | Classification accuracy: LSTM: 97.99% Bi-LSTM: 98.33% GRU: 99.01% Training time: LSTM: 31 min Bi-LSTM: 56 min GRU: 54 min | Automated feature extraction by RNN | Industrial ergonomics: Classification of awkward working positions |
| Bhatt et al. [67] | 2021 | Simulated pressure sensors: A synthetic portion of the bodies at rest data set | Classification: Convolutional neural network (CNN) with a ResNet backbone | Recall score: up to 99% | Automated feature extraction by CNN algorithm | Sleep research: Sleeping posture detection |
| Beltrán-Herrera et al. [46] | 2014 | Film pressure sensor matrix: Low-cost flexible array pressure sensor with 448 units | Classification: Support vector machine (SVM) | - | Feature extraction: Histogram of Oriented Gradients (HOG) descriptor | Health care: Body classification in lying state |
| Bourahmoune et al. [73] | 2022 | Single-point film pressure sensors: LifeChair (Pressure-sensitive desk chair with 9 DIY piezoresistive film pressure sensors) | Classification: Decision tree classification and regression trees (DT-CART), random forest (RF), k-nearest neighbors (kNN), linear regression (LR), linear discriminant analysis (LDA), naïve Bayes (NB) and neural network multilayer perceptron (MLP). | Classification accuracy: RF: 97.09% DT-CART: 96.19% kNN: 92.13% NN (MLP): 80.09% LR: 5367% LDA 53.16% NB: 41.71% | Feature extraction: Pressure distribution Additional feature: Body mass index (BMI) | Sitting ergonomics: Posture detection for desk working scenarios |
| Casas et al. [61] | 2018 | Film pressure sensor matrix: Pressure sensors arranged horizontally and equidistantly, covering an area of 2 m × 1 m. | Regression: Fusion of k-nearest neighbor (kNN) | Mean absolute errors (MAE): Joint angle: 17.5–25.4° Joint position: 9.76–14.02 cm | Feature extraction: Each sensor represents a stand-alone feature | Health care: Patient monitoring |
| Choffin et al. [12] | 2021 | Single-point film pressure sensors: 6 FSR sensors (FlexiForce A301, Tekscan Inc., Boston, MA, USA) | Regression: K-nearest neighbor (kNN) | Motion classification accuracy: 93.6% Angle Regression accuracy: 87.4% | - | Industrial ergonomics: Lowering risk of musculoskeletal injuries |
| Clever et al. [49] | 2020 | Simulated pressure sensors: Co-simulation: FleX and DART | Regression: Convolutional neural network (CNN) | Average pose estimation error: <5 cm | Automated feature extraction using CNN algorithm | Sleep research: Estimation of human sleeping posture |
| Cruz-Santos et al. [39] | 2014 | Film pressure sensor matrix: 2 pressure sensor arrays with 16 × 16 units in an area of 1108 × 554 mm (SensingTex, Barcelona, Spain) | Classification: Support vector machine (SVM) | Classification accuracy: Raw Data: 99.70% HOG: 98.70% SIFT: 98.95% | Feature extraction: (1) Raw data; (2) Histogram of Oriented Gradients (HOG) descriptor; (3) Scale Invariant Feature Transform (SIFT) descriptor | Health care: Patient monitoring |
| Cun et al. [54] | 2021 | Film pressure sensor matrix: Body pressure measurement system (BPMS) (Tekscan Inc., Boston, MA, USA) (2 Sensors) | Classification: K-nearest neighbor (kNN), support vector machine (SVM), random forest (RF), decision tree (DT) and naïve bayes (NB) | Classification accuracy: kNN: 82.65% SVMRBF: 89.26% SVMlinear: 83.47% RF: 85.95% DT: 77.69% NB: 79.34% | Algorithm specific features; no detailed description | Sitting ergonomics: Classification of sitting postures/activities |
| Diao et al. [45] | 2021 | Film pressure sensor matrix: Low-cost flexible array pressure sensor with 32 × 32 units based on Velostat® film (3M Company, St. Paul, MN, USA) | Classification: Deep residual network (ResNets) | Classification accuracy: short-term: 95.08% overnight sleep study: 86.35% | No hand-craft feature extraction | Sleep research: Estimation of human sleeping posture |
| Diao et al. [55] | 2021 | Film pressure sensor matrix: Low-cost flexible array pressure sensor with 32 × 32 units based on Velostat® film (3M Company, St. Paul, MN, USA) | Classification: K-nearest neighbor (kNN), support vector machine (SVM) | Classification accuracy: kNN: 79.02% SVM: 78.19% | Feature extraction: (1) Pressure-covered area of the mat; (2) Local pressure coverage area ratio; (3) Local pressure value ratio; (4) Left–right symmetry; (5) Left–right balance | Sleep research: Estimation of human sleeping posture |
| Diao et al. [103] | 2022 | Film pressure sensor matrix: Low-cost flexible array pressure sensor with 32 × 32 units based on Velostat® film (3M Company, St. Paul, MN, USA) | Classification: Self-developed low-cost estimation algorithm, LeNet-1, 2 Conv + 3 FC, ResNet18 | Classification accuracy: New estimation algorithm: 98.3% LeNet-1: 99.1% 2 Conv + 3 FC: 99.2% ResNet18: 99.4% | Data pre-processing: (1) Threshold filtering; (2) Gaussian filtering; (3) Adjacent affected noise removal Feature extraction: (1) The Euclidean distance between initial and end points of the trajectory | Sleep research: Estimation of human sleeping posture |
| Djamaa et al. * [40] | 2020 | Single-point film pressure sensors: 3 x FSR 402 (Interlink Electronics, Inc., Shenzhen, China); Additional Sensors: Bend sensor + IMU MPU 6050 (TDK InvenSense, Inc., San Jose, CA, USA) | Classification: Support vector machine (SVM), k-nearest neighbors kNN (k = 5), stacked random forest (RF), MultiBoostAB with RF (MB-RF) and MultiBoostAB with logistic model tree (MB-LMT) | Classification accuracy: SVM: 98.20% (8 s) RF: 100% (7 s and 8 s) MB-RF: 100% (7 s) MB-LMT: 96.59% (10 s) Stacked: 91.51% (3 s) kNN: 87.91% (3 s) Response time: MB-RF: 0.4589 ms RF: 1.6113 ms SVM: 0.7272 ms | Feature extraction: Segmentation using a sliding window procedure with a fixed-length window | Gait analysis |
| Feng et al. [104] | 2016 | Fiber optical pressure Sensor | Classification | Classification accuracy: 96% to 100% | - | Fall detection |
| Fulk et al. [56] | 2011 | Single-point film pressure sensors: 5 force-sensitive resistors (FSR, Interlink Inc, Camarillo, CA, USA) Additional Sensors: 3-dimensional accelerometer | Classification: Support vector machine (SVM) | Classification accuracy: 99.91% to 100% | Feature extraction: (1) nonoverlapping 2 s epochs (2) normalized on a scale of [0, 1] | Gait analysis |
| Gao et al. [66] | 2022 | Single-point film pressure sensors: Mattress with 8192 force-sensitive resistors (FSR, Interlink Inc, Camarillo, CA, USA) | Classification: AlexNet, 2-layer CNN, VGG and MatNe | Classification accuracy: AlexNet: 93.67% 2-layer CNN: 94.09% VGG: 98.59% MatNe: 99.02% Response time:AlexNet: 0.094 s 2-Layer CNN: 0.043 s VGG: 0.56 s MatNe: 0.095 s | Automated feature extraction | Sleep research |
| Gelaw et al. * [57] | 2022 | Film pressure sensor matrix: Intelligent Interfaces and Interaction research unit of Fondazione Bruno Kessler (FBK, Trento, Italy). | Classification: Random forest (RF), Gaussian naïve bayes, logistic regression, support vector machine (SVM) and deep neural network (DNN) | Classification accuracy: RF: 82% GNB: 88% SVM: 75% LR: 81% DNN: 93% | Feature extraction: (1) 64 sensor features (2) center of mass of the 32 sensors of the seat and back (3) features for each of the seat and back sensors, dividing the given 32 sensors into four quadrants and edges | Sitting ergonomics: Estimation of sitting posture during work on a PC |
| Goldstein et al. * [29] | 2020 | Film pressure sensor matrix: TekScan BPMS (Tekscan Inc., Boston, MA, USA) | Classification and Regression: Convolutional neural network (CNNs); | Classification accuracy: 95% Regression accuracy: average marker position error: 8.84 cm | Automated feature extraction by CNN algorithm | Sitting ergonomics: Slouch detection |
| Grimm et al. [47] | 2011 | Film pressure sensor matrix: XSensor X3 PX100:26.64.01 mattress (XSensor, Calgary, AB, Canada). | Classification: K-nearest neighbor (kNN) | Classification accuracy: 96.0% | - | Health care: Patient monitoring |
| Grimm et al. [13] | 2012 | Film pressure sensor matrix: Pressure-sensing mattresses | Classification: K-nearest neighbor (kNN) | Classification accuracy: 95.5% | - | Health care: Patient monitoring |
| Harada et al. [105] | 2002 | Single-point film pressure sensors: Mattress with 210 force-sensitive resistors (FSR, Interlink Inc, Camarillo, CA, USA) | Classification | - | - | Health care: Patient monitoring |
| He et al. [68] | 2022 | Film pressure sensor matrix: Thin-film array pressure sensor, which is made by transferring nanometer force-sensitive materials, silver paste and other materials to a flexible thin-film substrate, via a precision printing process | Classification: Convolutional neural network (CNN) | Classification accuracy: Improved ResNet: 99.86% ResNet: 90.99% VGG16: 81.26% MobileNet: 78.30% | Data pre-processing: Cross-mean filtering Extreme value processing Feature extraction: (1) Improved ResNet (2) ResNet50 (3) VGG16 (4) MobileNet | Sitting ergonomics: Detection of sitting postures |
| Hsia et al. [58] | 2009 | Single-point film pressure sensors: Two types of FSR from Interlink Electronics [10] were used: part no. 402 (0.5″ circle) and part no. 408 (24″ trimmable strip). | Classification: Support vector machine (SVM) | Classification accuracy: PCA + SVM: ≤75% Raw data + SVM: ≤92% Descriptive statistics + SVM: ≤95% | Feature extraction: Principal component analysis (PCA), descriptive statistics (mean, variance, standard deviation, root-mean squared features, etc.) | Sleep Research: Sleeping posture classification |
| Hu et al. [35] | 2021 | Film pressure sensor matrix: Low-cost flexible array pressure sensor with 32 × 32 units based on Velostat® film (3M Company, St. Paul, MN, USA) | Classification: Convolutional neural network (CNN) | Classification accuracy: (1) Standard training-test method: 84.80%; (2) Subject-specific method: 91.24% | Automated feature extraction using CNN algorithm | Health care: Patient monitoring |
| Jeong [62] | 2021 | Single-point film pressure sensors: 6 force-sensing resistors (FSR) Additional sensors: 6 distance sensors | Classification: k-nearest neighbor (kNN) | Classification accuracy: (1) Pressure sensors only: 59%; (2) Distance sensors only: 82%; (3) Mixed sensor: 92% | Feature extraction: (1) pressure sensors only; (2) Distance sensors only; (3) Mixed sensor | Sitting ergonomics: Classification of sitting postures |
| Lee et al. [69] | 2022 | Film pressure sensor matrix: 64 (8 × 8) FSRs (TechStorm, Seoul, Republic of Korea) | Classification: Convolutional neural network (CNN) | Classification accuracy: 99.66% | Automated feature extraction using CNN algorithm | Sitting ergonomics: Classification of sitting postures/activities |
| Li et al. [96] | 2020 | Film pressure sensor matrix: Pressure-sensing floor | Classification: Convolutional neural network (CNN), support vector machine (SVM), k-nearest neighbor (kNN), random forest (RF), decision tree (DT), naïve bayes (NB), BP neural network classifiers and CSK-DS-fusion algorithm (CNN + SVM + kNN + D-S) | Classification accuracy with threshold filter: CNN: 96.28% SVM: 94.45% kNN: 91.38% RF: 92.16% DT: 89.23% NB: 83.37% BP: 83.28% CSK-DS: 99.96% | Data pre-processing: Threshold filtering Gaussian filtering | Industrial ergonomics: Standing posture estimation |
| Li et al. [63] | 2020 | Film pressure sensor matrix: Pressure-sensing floor | Classification: Convolutional neural network (CNN), | Classification accuracy 96.6% | - | Industrial ergonomics: Standing posture estimation |
| Liu et al. [70] | 2019 | Film pressure sensor matrix: Flexible piezoresistive array sensor with pixel size of 64 × 32 and single sensor with maximum test pressure of 500 N | Classification: Convolutional neural network (CNN) | Classification accuracy: CNN: 97.2% | Automated feature extraction by CNN algorithm | Sleep Research: Sleeping posture classification |
| Ma et al. [22] | 2017 | Single-point film pressure sensors: 12 force-sensitive-resistor pressure sensors (FSR-406, Interlink Inc., Camarillo, CA, USA) | Classification: J48 decision tree (J48), support vector machine (SVM), multilayer perceptron (MLP), naïve bayes (NB; default + BayesNet), and k-nearest neighbor (kNN) | Classification accuracy: J48: 99.48% SVM: 79.08% MLP: 95.5% Naïve Bayes (default): 40.09% BayesNet: 94.53% kNN (k = 1): 98.53% kNN (k = 5): 98.52% | Algorithm-specific feature extraction | Health care: Patient monitoring in a wheelchair |
| Matar et al. [106] | 2020 | Single-point film pressure sensors: a matrix of 64 × 27 textile-made piezoresistive pressure sensors | Classification: Feed-forward artificial neural network (FFANN) | Classification accuracy: 97.9% | Feature extraction: (1) Histogram of Oriented Gradients (HOG) descriptor (2) Local Binary Patterns (LBP) | Sleep Research: Sleeping posture classification |
| Matthies et al. * [15] | 2021 | Single-point film pressure sensors: DIY-sensor mat: pressure tiles (binary switches) + capacitive sensor (continuous data stream). | Classification: Random forest (RF) | Classification accuracy: 85.02% | - | Health care: Patient monitoring: bed-exit intention detection, pressure ulcer prevention and sleep apnea mitigation |
| Meyer et al. [44] | 2010 | Film pressure sensor matrix: Textile pressure sensor (new sensor), Tekscan Conformat (Tekscan Inc., Boston, MA, USA) | Classification: Naïve bayes (NB) | Classification accuracy: Up to 82% | Data pre-processing: With and without hysteresis compensation Feature extraction: (1) Sensor value from each sensor element; (2) Center of force; (3) Pressure applied to 4 and 16 equally aggregated areas of the seating area | Sitting ergonomics: Classification of sitting postures/activities |
| Merry at al. [41] | 2021 | Film pressure sensor matrix: F-Scan pressure measurement insoles (Tekscan Inc., Boston, MA, USA) | Classification: Support vector machine (SVM), decision tree (DT), discriminant analysis (DA), and k-nearest neighbors (kNN) | Classification accuracy: SVM: 89.73% DT: 89.45% DA: 83.86% kNN (k = 1): 84.87% | Data pre-processing: Subdivision of the plantar side of the foot using a modified “PRC” mask (Novel GmbH, Munich, Germany) Feature extraction: Overlapping sliding window approach of a single variable over a specific time duration | Gait analysis: Classifying sitting, standing and walking |
| Milovic et al. [43] | 2022 | Single-point film pressure sensors: Textile pressure sensor made of a low-density polyethylene (LDPE) sheet (ANT006BCB), integrated in expandable pants | Classification: Random forest (RF), time series forest (TSF), and multi-representation sequence learner (Mr-SEQL) | Classification accuracy: RF: 91.22% TSF: 90.53% Mr-SEQL: 78.97% | Data pre-processing: (1) Outlier elimination; (2) Fifth-order low-pass Butterworth filter Feature extraction: TS Fresh Relevant-Feature Extractor function | Gait analysis: Detection of gait phases |
| Mutlu et al. [14] | 2007 | Single-point film pressure sensors: Force-sensitive resistor pressure sensors (FSR, Interlink Electronics, Inc., Shenzhen, China) | Classification: Simple logistic, naïve bayes (NB), artificial neural network (multi-layer perceptron) and support vector machine (SVM) | Classification accuracy: Simple logistic: 82.5% NB: 74.9% Multi layer perception: 79.1% SVM: 78.5% | Feature extraction: (1) Position and size of the bounding box; (2) Distance between the bounding boxes; (3) Distance and angle between the centers of the pressures; (4) Centers, radii and orientations of two ellipses fit to the pressure areas | Sitting ergonomics: Classification of sitting postures/activities |
| Rihar et al. [48] | 2014 | Film pressure sensor matrix: 2 CONFORMat systems, Model 5330, (Tekscan Inc., Boston, MA, USA) and 6 IMUs (STMicroelectronics, Plan-les-Ouates, Swiss) | Image recognition | - | Health care: Observation of newborn children | |
| Rodríguez et al. [71] | 2020 | Film pressure sensor matrix: Pressure mat sensor (BodiTrak BT3510, Vista Medical GmbH, Vienna, Austria) | Classification: Convolutional neural network (CNN) | Classification accuracy: Model A: 98.8% Model B: 99.0% | Data pre-processing Fuzzy representation | Health care: Monitoring of elderly patients |
| Roh et al. [16] | 2018 | Load cells: 4 low-cost load cells (P0236-I42, Hanjin Data Corp., Gimpo, Republic of Korea) | Classification: Support vector machine (SVM), linear discriminant analysis (LDA), quadratic discriminant analysis (QDA), naïve bayes (NB), and random forest (RF), decision tree (DT) | Classification accuracy: SVMrbf: 97.20% SVMlin: 86.27% LDA: 88.56% QDA: 89.56% NB: 84.33% RF: 93.17% DT: 76.79% | Feature extraction: Sensor fusion | Sitting ergonomics: Sitting postures/activities |
| Sazonov et al. [51] | 2011 | Single-point film pressure sensors: Five force-sensitive resistors (FSRs) (Interlink Electronics, Inc., Shenzhen, China) and a 3D accelerometer (LIS3L02AS4) | Classification: Support vector machine (SVM) | Classification accuracy: On full sensor set: 95.2% optimized sensor set: 98% | No feature extraction | Gait analysis: Gait activities |
| Sazonov et al. * [52] | 2015 | Single-point film pressure sensors: “SmartShoe” device: 5 force-sensitive resistors (FSR) (Interlink Electronics, Inc., Shenzhen, China) and a 3D accelerometer (ADXL335) | Classification: Support vector machine (SVM), multinomial logistic discrimination (MLD), multilayer perceptron (MLP) | Classification Error: Manual activity annotation: 5.0% SVM: 5.0% MLD: 5.5% MLP: 5.1% | Feature extraction: Mean value (mean), entropy (ent) and standard deviation (std). | Gait analysis: Gait activities |
| Seo et al. [72] | 2021 | Film pressure sensor matrix | Classification: Convolutional neural network (CNN) | Classification accuracy: CNN: 99.84% | - | Sitting ergonomics: Sitting postures |
| Tam et al. [102] | 2019 | Single-point film pressure sensors: 8 pressure sensors (FlexiForce A301, Tekscan Inc., Boston, MA, USA) MU (MPU-6050, InvenSense, San Jose, CA, USA) | Regression: Deep neural network (DNN) | Regression accuracy: MSE: >0.00021 R2: <0.93 | Feature extraction: 224 features using 3 convolution layers | Gait analysis: Gait activities |
| Tang et al. * [107] | 2012 | Single-point film pressure sensors: 2 “SmartShoe” devices and 5 force-sensitive resistors (FSRs) (Interlink Electronics, Inc., Shenzhen, China) and a 3D accelerometer | Classification: Support vector machine (SVM) | No feature extraction | Gait analysis: Gait activities | |
| Tang et al. [108] | 2014 | Single-point film pressure sensors: 2 “SmartShoe” devices, 5 force-sensitive resistors (FSRs) (Interlink Electronics, Inc., Shenzhen, China) and a 3D accelerometer | Classification: Support vector machine (SVM), multilayer perceptron (MLP) | Classification accuracy: SVM: 97.0% SVMrej: 98.7% MLP: 97.3% MLPrej: 99.8% | Feature extraction: Mean value, minimum value, standard deviation, entropy, variance, maximum value, number of mean crossings (NMC), mean absolute deviation (MAD) and the ratio between the root mean square of wavelet coefficients | Gait analysis: Gait activities |
| Tessendorf et al. [109] | 2009 | Film pressure sensor matrix: Conformat (Tekscan Inc., Boston, MA, USA) | Classification: Unsupervised learning with database of data prototypes | Classification accuracy: 91% | - | Sitting ergonomics: Sitting postures |
| Tsutsui et al. [97] | 2023 | Single-point film pressure sensors: 2 FSR-402-short sensors(Interlink Electronics, Inc., Shenzhen, China) | Analytic classification | Classification accuracy: 75% | - | Gait analysis: Gait activities |
| Wu et al. [94] | 2022 | Single-point film pressure sensors: Flexible pressure measurement units | Classification | Classification accuracy: 4 regions: 80% 8 regions: 84% FCM model: 95% | Data pre-processing: Fuzzy C-Means Clustering Feature extraction: 4 regions 8 regions FCM model | Sports science: Detection of gait phases in ice and snow sports |
| Yin et al. [59] | 2021 | Single-point film pressure sensors: Two FSR pressure sensors (LOSON LSH-10) | Classification: Simulated-annealing-algorithm-based support vector machine (SA-SVM), support vector machine (SVM) | Classification accuracy: SA-SVM: 94.8% ± 0.75% SVM: 89.24% ± 2.17% | Data pre-processing: Butterworth low-pass filter (cut-off frequency: 10 Hz) Feature extraction: mRMR algorithm | Gait analysis: Locomotion pattern recognition |
| Yousefi et al. [64] | 2011 | Film pressure sensor matrix | Classification: K-nearest neighbor (kNN) | Classification accuracy: kNN-ICA: 94.3% kNN-PCA: 97.7% | Data pre-processing: Filtering and histogram equalization | Health care: Patient monitoring |
| Zemp et al. * [60] | 2016 | Single-point film pressure sensors: FSR 406, (43.69 mm square sensor, thickness: 0.45 mm; Interlink Electronics, Inc., Shenzhen, China) | Classification: Support vector machine (SVM), multinomial regression (MNR), boosting, neural network (NN), random forest (RF), and a combination of boosting | Classification accuracy: SVM: 82.7% MNR: 87.8% Boosting: 90.4% NN: 90.4% RF: 90.9% Combination: boosting NN, RF: 90.8% | Feature extraction: Median of a one-second duration | Sitting ergonomics: Classification of sitting postures |
| Zhang et al. [65] | 2022 | Single-point film pressure sensors: Flexiforce sensor A301 (Tekscan, Inc., Boston, MA, USA) MEMS Sensor MPU9250 | Classification: Established extreme learning machine (ELM), K-nearest neighbor (kNN) | Classification accuracy: ELM (energy feature): 97.4% ELM (energy entropy feature): 96.6% kNN (energy feature): 95.4% kNN (energy entropy feature): 95.0% | Feature extraction: (1) Wavelet packet energy features (2) Wavelet packet energy entropy features | Gait analysis: Gait pattern recognition |
| Zhao et al. [34] | 2021 | Film pressure sensor matrix: 2 XSensor pressure mats (Model PX100:48.48.02, XSensor, Calgary, AB, Canada) | Classification: Random forest (RF) and deep learning (DL) | Classification accuracy: RF (F1): 52.2% RF (F2): 80.5% DL: 42.9% | Feature extraction: F1: absolute sensor values F2: sensor values relative to the beginning of the task | Automotive design: Driver’s seat position design |
| Zhao et al. * [74] | 2021 | Film pressure sensor matrix: 2 Xsensor pressure mats (Model PX100:48.48.02, (XSensor, Calgary, AB, Canada) | Classification: Random forest (RF) support vector machine (SVM), multilayer perceptron (MLP), naïve bayes (NB), and k-nearest neighbor (kNN) | Classification accuracy: RF: 86% NB: 76% SVM: 70% MLP: 74% k-NN: 78% | Feature extraction: Body pressure distribution (BPD)-based feature extraction |
| Author | Year | Input Data Source | Digital Human Model | Optimization Criterium | Application Scenario |
|---|---|---|---|---|---|
| Barman et al. [82] | 2022 | Virtual force vectors: Load of a box | Dynamic human model: 2D three-compartment controller fatigue model, 10 DOF | Optimization of joint fatigue | Industrial ergonomics: Lifting task |
| Choi et al. [76] | 2020 | Load cell: 6-axis force–torque sensor (nano25, ATI, Apex, NC, USA) | Dynamic human model: 3D human model | Optimization of joint torques | Sports science: Estimating swing movements in golfing |
| Clever et al. [93] | 2018 | Virtual pressure matrix: Virtual smart sensor mattress | Human body shape model | Sleep research: Estimation of human sleeping posture | |
| Davoudabadi et al. [79] | 2015 | Virtual force vectors: Load of a dumbbell | Musculoskeletal human model: Anybody modelling system (AnyBody Technology A/S, Aalorg, Denmark) | Minimization of muscle effort | Sports science: Snatch weightlifting |
| Davoudabadi et al. * [110] | 2016 | Virtual force vectors: Load to the human hand–arm system | Musculoskeletal human model: Anybody modelling system (AnyBody Technology A/S, Aalorg, Denmark) | Minimization of muscle effort | Sports science: Using a sailing winch |
| Howard et al. [98] | 2011 | Film pressure sensor matrix | Dynamic human model 3D human model | Optimization of joint torques | Sitting ergonomics: Optimization of wheel chair design |
| Kwon et al. [85] | 2017 | Virtual force vectors: Personal body load | Dynamic human model: Generator of body (GEBOD) and SantosTM (SantosHuman Inc., Coralville, IA, USA) | Minimization of discomfort function and energy cost | Gait analysis: Estimation of joint angle and gait movements |
| Liu et al. [84] | 2009 | Virtual force vectors: External load on hands | Dynamic human model: Software SNOPT and SantosTM (SantosHuman Inc., Coralville, IA, US) | Optimization of joint torques | Product design: Posture estimation with dynamic human model for external loads |
| Lu et al. [89] | 2011 | Virtual force vectors | Human body shape model: University of Michigan Three-Dimensional Static Strength Prediction Program (3DSSPP) | Industrial ergonomics | |
| Mao et al. [99] | 2021 | Virtual pressure matrix | Human body shape model: User avatar (self-designed) | Sitting ergonomics: Estimation of different sitting postures on different chair designs | |
| Marler et al. [77] | 2011 | Virtual force vectors: Load of a box | Dynamic human model: Software SNOPT and SantosTM (SantosHuman Inc., Coralville, IA, USA) | Minimization of maximum joint torques | Industrial ergonomics: Analysis of box lifting tasks |
| Nakajima et al. [80] | 2022 | Virtual force vectors: Contact forces for handling a box | Musculoskeletal human model: Self-designed musculoskeletal hand model | Minimization of muscle effort | Industrial ergonomics: Evaluation of product design and for manual tasks |
| Potash et al. [86] | 2022 | Virtual force vectors: | Human body shape model: JACK (Siemens Industry Software Inc., Plano, TX, USA) | Industrial ergonomics: Work space optimization | |
| Rahmati et al. [78] | 2014 | Virtual force vectors: Load of a dumbbell | Dynamic human model: 3D human model | Optimization of joint torques | Sport science: Snatch weightlifting techniques |
| Ramdani et al. [81] | 2006 | Virtual force vectors | Dynamic human model: Four-bar linkage human model | Hypothesis of quasi-static equilibrium | Health care |
| Rothaug et al. [88] | 2000 | Virtual force vectors | Human body shape model: RAMSIS (Human Solutions GmbH, Kaiserslautern, Germany) | Automotive design | |
| Salahi et al. [111] | 2016 | Virtual force vectors | Dynamic human model: 3D human model | Optimization of joint torques | Fundamental ergonomics research |
| Seitz et al. [87] | 2005 | Virtual force vectors | Human body shape model: RAMSIS (Human Solutions GmbH, Kaiserslautern, Germany) | Automotive design | |
| Van Geffen et al. [100] | 2009 | Load cells: Two multi-axis load cells (ATI mini 45, ATI Industrial Automation, NYC, USA) | Dynamic human model 3D human model | Sitting ergonomics: Estimation of different sitting postures on different chair design | |
| Wirsching et al. * [90] | 2012 | Virtual force vectors: Interaction force on hand–arm system | Human body shape model: RAMSIS (Human Solutions GmbH, Kaiserslautern, Germany) | Automotive design: Evaluation of distances in cockpit design | |
| Yang et al. [42] | 2006 | Virtual force vectors: Contact forces for handling objects | Dynamic human model: Self-designed dynamic hand model | Minimization of joint displacement | Fundamental ergonomics research: Dynamic model for hand posture estimation |
| Zhang et al. [37] | 2021 | Load cells | Dynamic human model | Sports science: Riding a bike | |
| Zou et al. [101] | 2011 | Virtual force vectors: Human body mass | Dynamic human model | Sitting ergonomics: Estimation of different sitting postures |
| Estimation Methods | ML-Based Methods | DHM-Based Methods | ||||||
|---|---|---|---|---|---|---|---|---|
| Image Recognition | Classification | Regression | Dynamic Human Model | Human Body Shape Model | Musculo-Skeletal Human Model | |||
| Input Data Sources | Load Cells | Single-Point Film Pressure Sensors | Film Pressure Sensor Matrix | Virtual Force Vectors | ||||
| Required expert knowledge for using the methods |  | |||||||
| Necessary knowledge about the application |  | |||||||
| Effort for adaptation to a new application |  | |||||||
| Detail level of output posture |  | |||||||
| Potential for automatization |  | |||||||
| Potential for sensor integration |  | |||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Helmstetter, S.; Matthiesen, S. Human Posture Estimation: A Systematic Review on Force-Based Methods—Analyzing the Differences in Required Expertise and Result Benefits for Their Utilization. Sensors 2023, 23, 8997. https://doi.org/10.3390/s23218997
Helmstetter S, Matthiesen S. Human Posture Estimation: A Systematic Review on Force-Based Methods—Analyzing the Differences in Required Expertise and Result Benefits for Their Utilization. Sensors. 2023; 23(21):8997. https://doi.org/10.3390/s23218997
Chicago/Turabian StyleHelmstetter, Sebastian, and Sven Matthiesen. 2023. "Human Posture Estimation: A Systematic Review on Force-Based Methods—Analyzing the Differences in Required Expertise and Result Benefits for Their Utilization" Sensors 23, no. 21: 8997. https://doi.org/10.3390/s23218997
APA StyleHelmstetter, S., & Matthiesen, S. (2023). Human Posture Estimation: A Systematic Review on Force-Based Methods—Analyzing the Differences in Required Expertise and Result Benefits for Their Utilization. Sensors, 23(21), 8997. https://doi.org/10.3390/s23218997