


Unmanned Aerial Vehicle-Based Compressed Data Acquisition for Environmental Monitoring in WSNs
Abstract
:1. Introduction
2. Related Work
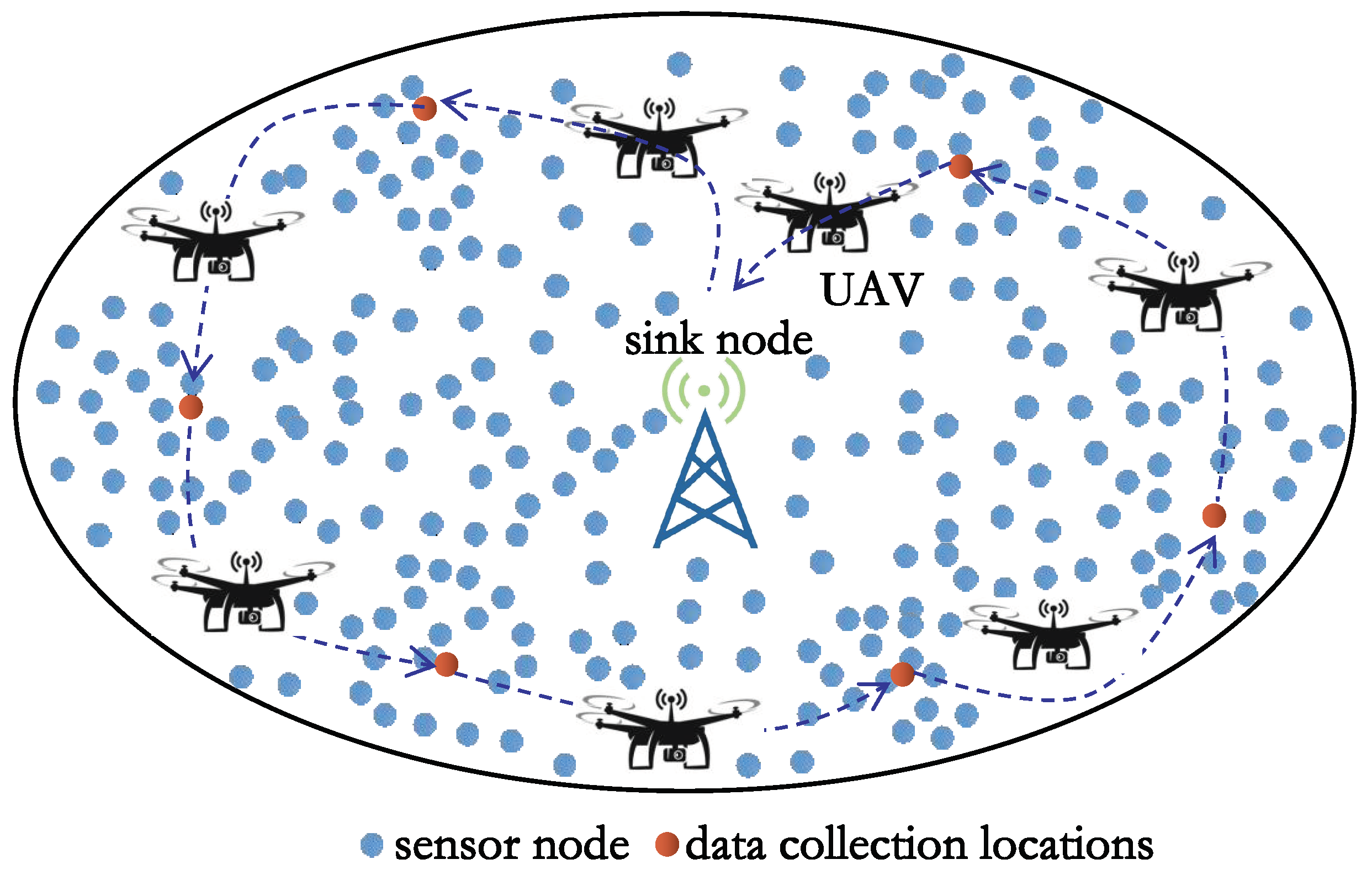
- The CS theory is combined with UAV technology to realize efficient data collection in WSNs. To be specific, the CS theory separates encoding and decoding into measurement and reconstruction. Based on the CS theory, the sensor node only uses the simple multiplication and addition operations to implement data compression, while data reconstruction is carried out on the powerful sink node, improving the compression efficiency. In addition, the UAV is used as a mobile aerial base station to transmit data and further improves the efficiency of data collection;
- The minimization problem of energy consumption in a UAV-based data collection system is formulated as an optimization problem of the hovering locations of the UAV and path planning. For this problem, we propose a UAV-assisted compressed data acquisition algorithm. This algorithm makes use of the CS theory to determine the data collection locations of the UAV and optimizes greedy algorithm to obtain the optimal path;
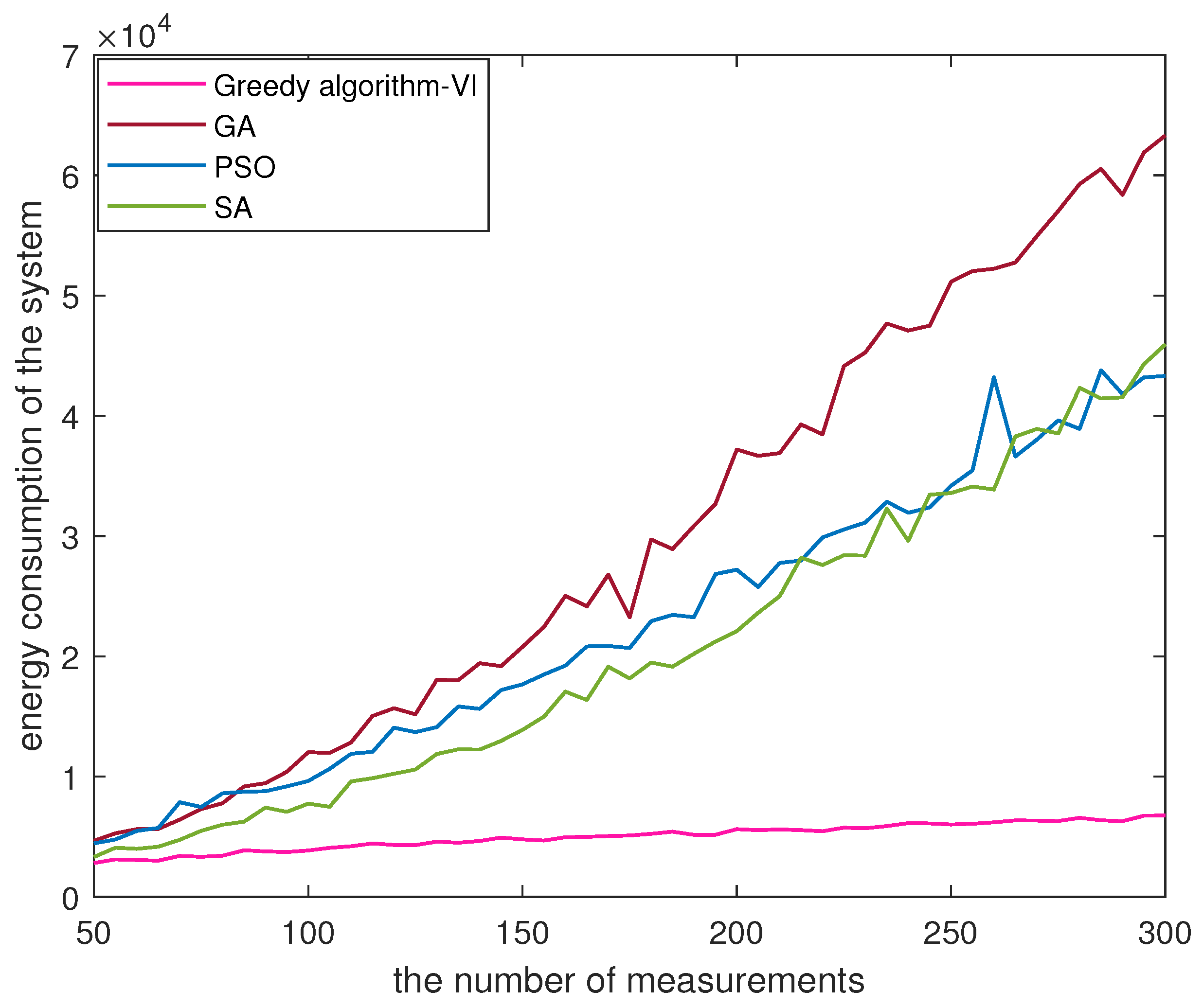
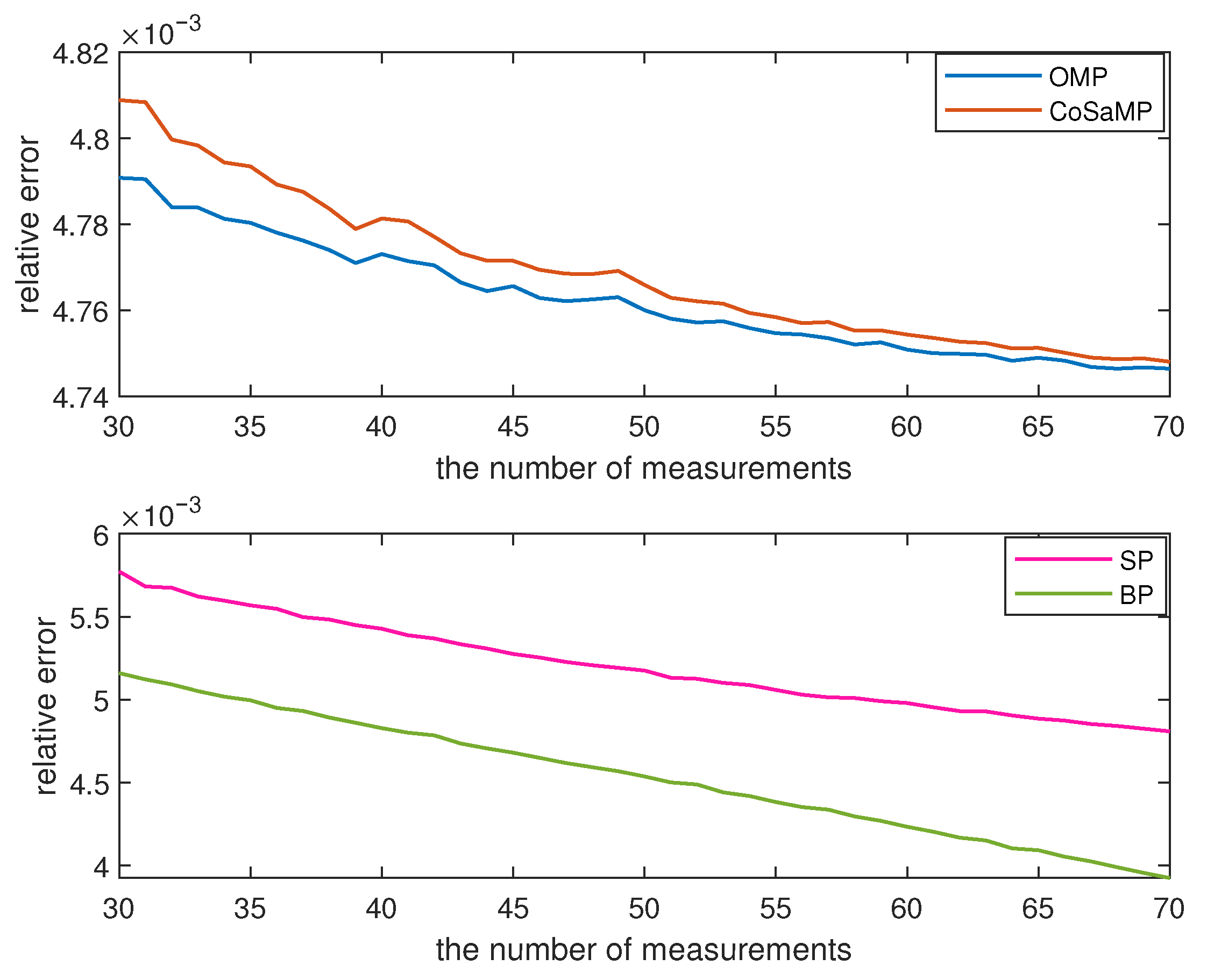
- In terms of compressed data acquisition, the results of the experiment demonstrate that the proposed algorithm reduces the energy consumption of the system compared with the benchmark algorithms, such as genetic algorithm, PSO algorithm, and simulated annealing algorithm. Furthermore, the sensing matrix in the proposed algorithm can improve the data monitoring accuracy.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surveys | Objective | Method |
|---|---|---|
| Karaku et al. [2] | analyze the energy efficiency of the CS theory on the network lifetime. | build a unified computation and communication energy model, and construct the MIP framework. |
| Fazel et al. [3] | save energy and bandwidth. | employ the CS theory and random channel access. |
| Chen et al. [4] | decrease the measurements. | exploit correlations among attributes. |
| He et al. [5] | improve the recovery accuracy. | utilize the low-rank block Hankel matrix to exploit the inherent correlation among multi-attribute data. |
| Wang et al. [6] | reduce the energy consumption of the new nodes added in dynamic WSNs. | make use of the CS-based data aggregation. |
| Xiang et al. [7] | realize the high-fidelity data collection. | develop diffusion wavelet as the sparsifying basis and compressed data aggregation. |
| Ebrahimi et al. [8] | prolong the network lifetime. | exploit compressive data gathering based on the MSTP. |
| Sun et al. [9] | reduce the energy consumption and improve the robustness. | use the cluster-based topology for data transmission and the sparsest random sampling |
| Ebrahimi et al. [10] | implement energy-efficient data collection in dense WSNs. | use the UAVs and the clustered tree for compressive data gathering |
| Martinez-de Dios et al. [11] | improve the performance of data collection and prolong the lifetime of the nodes. | utilize the dynamic cooperation of the UAS and WSN for data collection. |
| Zhan et al. [12] | minimize the maximum energy consumption of all SNs. | jointly optimize the SNs’ wake-up schedule and the UAV’s trajectory. |
| Wang et al. [13] | minimize the data loss. | join the user scheduling and the UAV’s trajectory planning. |
| Yu et al. [14] | perform tasks efficiently with the UAVs. | use hybrid PSO algorithm to plan the UAVs’ path. |
| Liu et al. [15] | minimize the mission completion time of the UAV. | optimize the UAV’s flying speeds, hovering positions and visiting sequence through the SCA and GA-based algorithms |
| Qadir et al. [16] | plan the collision-free path of the UAV for pre-disaster assessment. | analyze different meta-heuristic algorithms and propose Dynamic Group-Based Cooperative Algorithm. |
3. System Model and Method
3.1. CS Theory
3.2. The UAV-Based System Model
3.3. Compressed Data Acquisition Algorithm
| Algorithm 1: the UAV-assisted compressed data acquisition algorithm |
| Input: |
| Historical data of N sensor nodes, the nodes’ locations and the reconstruction accuracy. |
| Output: |
| the measurements y. |
| 1: Obtain the sparsifying basis based on the eigenvalue decomposition of historical data. |
| 2: Estimate the sparsity k of sensory data. |
| 3: Determine the number M of measurements based on the reconstruction accuracy. |
| 4: Get M data acquisition locations and the corresponding measurement matrix . |
| 5: Utilize greedy algorithm to obtain a sequence of the M locations. |
| 6: Conduct two types of operations (variation and insertion), run T times for each operation and obtain a sequence of the M locations. |
| 7: The sink node dispatches the UAV to collect data from the M locations. |
| 8: After finishing data collection, the UAV carries the measurements y back to the sink node. |
4. Results
- The GA algorithm searches for the optimal solutions by simulating the natural evolutionary process. The basic steps include coding, generating an initial population, calculating a fitness function, selection, crossover, mutation, generating the next generation of population and decoding. In this experiment, the coding corresponds to the order in which the UAV visits the data collection points. The population size and the maximum number of iterations is set to 2000, the partial-mapped crossover and mutation rates are and . In the selection process, the fitness function is the path length, it takes the inverse and then performs a roulette selection. The mutation is to randomly select two cities and swap their positions. The decoding is the path of the UAV.
- The core idea of the SA algorithm is to accept, with some probability, a solution that is worse than the current one, and then continue the search with this worse solution. During the search process, different weights are assigned to the three neighborhood structures and a roulette wheel is employed to choose a neighborhood structure. The maximum number of iterations in the inner loops is 15 and it is 300 in the outer loops.
- The PSO algorithm belongs to a kind of evolutionary algorithm. The basic steps include the initialization of particle positions and velocities, the calculation of the fitness function values, individual extremes and population extremes, and their update. Like SA, it starts from a random solution and finds the optimal solution through the iterations. In the experiment, the number of the particles is 500, and the number of iterations is 2000. The quality of the solution is evaluated through the fitness function. Compared with the rules of the GA algorithm, the PSO algorithm does not include crossover and mutation operations.
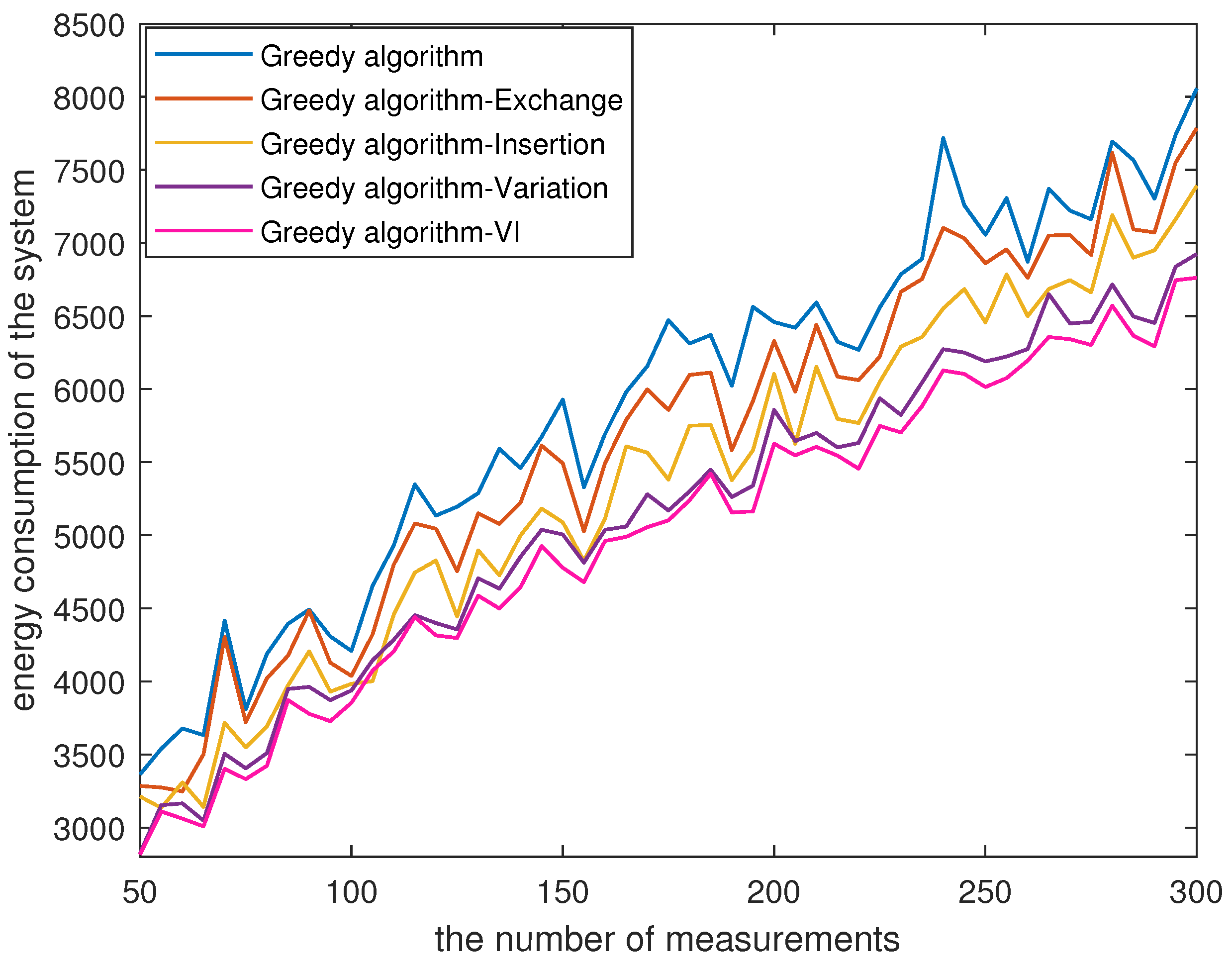
- Greedy algorithm with VI is the path planning method of the UAV in the proposed algorithm. The value of T in the experiment is set as 2 ×. The initial path of the UAV is first planned by greedy algorithm, then the variation operation and the insertion operation are performed for optimization.
4.1. Comparison of Data Gathering Algorithms
4.2. Analysis of Data Monitoring Performance
4.3. Comparison of Data Monitoring Performance
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Karakus, C.; Gurbuz, A.C.; Tavli, B. Analysis of energy efficiency of compressive sensing in wireless sensor networks. IEEE Sens. J. 2013, 13, 1999–2008. [Google Scholar] [CrossRef]
- Fazel, F.; Fazel, M.; Stojanovic, M. Random access compressed sensing for energy-efficient underwater sensor networks. IEEE J. Sel. Areas Commun. 2011, 29, 1660–1670. [Google Scholar] [CrossRef]
- Chen, G.; Liu, X.Y.; Kong, L.; Lu, J.L.; Wu, M.Y. Multi-attribute compressive data gathering. In Proceedings of the 2014 IEEE Wireless Communications and Networking Conference (WCNC), Istanbul, Turkey, 6–9 April 2014. [Google Scholar]
- He, J.; Zhou, Y.; Sun, G.; Xu, Y. Compressive Multi-Attribute Data Gathering Using Hankel Matrix in Wireless Sensor Networks. IEEE Commun. Lett. 2019, 23, 2417–2421. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, Q.; Gu, Y.; Tong, J. Compressive Sensing-Based Data Aggregation Approaches for Dynamic WSNs. IEEE Commun. Lett. 2019, 23, 1073–1076. [Google Scholar] [CrossRef]
- Xiang, L.; Luo, J.; Rosenberg, C. Compressed data aggregation: Energy-efficient and high-fidelity data collection. IEEE-ACM Trans. Netw. 2013, 21, 1722–1735. [Google Scholar] [CrossRef]
- Ebrahimi, D.; Assi, C. Compressive data gathering using random projection for energy efficient wireless sensor networks. Ad Hoc Netw. 2014, 16, 105–119. [Google Scholar] [CrossRef]
- Sun, P.; Wu, L.; Wang, Z.; Xiao, M.; Wang, Z. Sparsest random sampling for cluster-based compressive data gathering in wireless sensor networks. IEEE Access 2018, 6, 36383–36394. [Google Scholar] [CrossRef]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.H.; Assi, C. UAV-aided projection-based compressive data gathering in wireless sensor networks. IEEE Internet Things J. 2019, 6, 1893–1905. [Google Scholar] [CrossRef]
- Martinez-de Dios, J.R.; Lferd, K.; de San Bernabé, A.; Núnez, G.; Torres-González, A.; Ollero, A. Cooperation between UAS and wireless sensor networks for efficient data collection in large environments. J. Intell. Robot. Syst. 2013, 70, 491–508. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Cheng, C.T.; Deng, L.; Chen, X.; Xiao, F. A joint user scheduling and trajectory planning data collection strategy for the UAV-assisted WSN. IEEE Commun. Lett. 2021, 25, 2333–2337. [Google Scholar] [CrossRef]
- Yu, Z.; Si, Z.; Li, X.; Wang, D.; Song, H. A novel hybrid particle swarm optimization algorithm for path planning of UAVs. IEEE Internet Things J. 2022, 9, 22547–22558. [Google Scholar] [CrossRef]
- Liu, K.; Zheng, J. UAV trajectory optimization for time-constrained data collection in UAV-enabled environmental monitoring systems. IEEE Internet Things J. 2022, 9, 24300–24314. [Google Scholar] [CrossRef]
- Qadir, Z.; Zafar, M.H.; Moosavi, S.K.R.; Le, K.N.; Mahmud, M.P. Autonomous UAV path-planning optimization using metaheuristic approach for predisaster assessment. IEEE Internet Things J. 2021, 9, 12505–12514. [Google Scholar] [CrossRef]
- Lv, C.; Wang, P.; Ma, G.; Chi, H.; Du, Z.; Li, X. Unmanned Aerial Vehicle for Sparse Sampling in Wireless Sensor Networks. In Proceedings of the 2023 9th International Conference on Electrical Engineering, Control and Robotics (EECR), Wuhan, China, 24–26 February 2023. [Google Scholar]
- Lv, C.; Ren, Y.; Li, X.; Wang, P.; Du, Z.; Ma, G.; Chi, H. Unmanned Aerial Vehicle-Assisted Sparse Sensing in Wireless Sensor Networks. IEEE Wirel. Commun. Lett. 2023, 12, 977–981. [Google Scholar] [CrossRef]
- Lopes, M. Estimating unknown sparsity in compressed sensing. In Proceedings of the 30th International Conference on Machine Learning(ICML 2013), Atlanta, GA, USA, 16–21 June 2013. [Google Scholar]
- Zhu, B.; Bedeer, E.; Nguyen, H.H.; Barton, R.; Henry, J. UAV trajectory planning in wireless sensor networks for energy consumption minimization by deep reinforcement learning. IEEE Trans. Veh. Technol. 2021, 70, 9540–9554. [Google Scholar] [CrossRef]
- Yang, D.; Wu, Q.; Zeng, Y.; Zhang, R. Energy tradeoff in ground-to-UAV communication via trajectory design. IEEE Trans. Veh. Technol. 2018, 67, 6721–6726. [Google Scholar] [CrossRef]
- Ghorbel, M.B.; Rodriguez-Duarte, D.; Ghazzai, H.; Hossain, M.J.; Menouar, H. Joint position and travel path optimization for energy efficient wireless data gathering using unmanned aerial vehicles. IEEE Trans. Veh. Technol. 2019, 68, 2165–2175. [Google Scholar] [CrossRef]
- Ghazzai, H.; Ghorbel, M.B.; Kadri, A.; Hossain, M.J.; Menouar, H. Energy-efficient management of unmanned aerial vehicles for underlay cognitive radio systems. IEEE Trans. Green Commun. Netw. 2017, 1, 434–443. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- He, Y.; Mo, L.; Liu, Y. Why are long-term large-scale wireless sensor networks difficult: Early experience with GreenOrbs. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2010, 14, 10–12. [Google Scholar] [CrossRef]

| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| m | 500 g [22] | n | 4 [22] | r | 20 cm [22] |
| v, | 15 m/s [23] | , | 5 w, 0 w [22] | H | 50 m [20] |
| w [23] | P | 21 dBm/Hz [23] | dBm/Hz [23] | ||
| B | 1 MHz [20] | , | 1 dB, 20 dB [24] | f | 2 GHz [23] |
| 3 [23] | 10 [23] | [23] |
| The Value of M | Algorithms | The UAV’s Path Length (×) | Running Time (s) |
|---|---|---|---|
| 50 | Greedy algorithm-VI | 0.5789 | 2.2914 |
| GA | 0.9602 | 22.5102 | |
| PSO | 0.9155 | 49.5505 | |
| SA | 0.6829 | 0.0804 | |
| 60 | Greedy algorithm-VI | 0.6393 | 2.1403 |
| GA | 1.0887 | 20.7948 | |
| PSO | 0.9819 | 55.3686 | |
| SA | 0.8401 | 0.0397 | |
| 70 | Greedy algorithm-VI | 0.6288 | 2.2115 |
| GA | 1.1590 | 22.5486 | |
| PSO | 1.1289 | 60.8934 | |
| SA | 0.8214 | 0.0320 | |
| 80 | Greedy algorithm-VI | 0.6175 | 2.4702 |
| GA | 1.1628 | 24.9415 | |
| PSO | 1.1803 | 24.9415 | |
| SA | 0.8569 | 0.0325 | |
| 90 | Greedy algorithm-VI | 0.6985 | 2.7317 |
| GA | 1.3224 | 26.2906 | |
| PSO | 1.6216 | 73.7638 | |
| SA | 0.9751 | 0.0363 | |
| 100 | Greedy algorithm-VI | 0.6837 | 2.7370 |
| GA | 1.5032 | 27.2675 | |
| PSO | 1.5390 | 78.3294 | |
| SA | 1.1294 | 0.0363 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, C.; Yang, L.; Zhang, X.; Li, X.; Wang, P.; Du, Z. Unmanned Aerial Vehicle-Based Compressed Data Acquisition for Environmental Monitoring in WSNs. Sensors 2023, 23, 8546. https://doi.org/10.3390/s23208546
Lv C, Yang L, Zhang X, Li X, Wang P, Du Z. Unmanned Aerial Vehicle-Based Compressed Data Acquisition for Environmental Monitoring in WSNs. Sensors. 2023; 23(20):8546. https://doi.org/10.3390/s23208546
Chicago/Turabian StyleLv, Cuicui, Linchuang Yang, Xinxin Zhang, Xiangming Li, Peijin Wang, and Zhenbin Du. 2023. "Unmanned Aerial Vehicle-Based Compressed Data Acquisition for Environmental Monitoring in WSNs" Sensors 23, no. 20: 8546. https://doi.org/10.3390/s23208546
APA StyleLv, C., Yang, L., Zhang, X., Li, X., Wang, P., & Du, Z. (2023). Unmanned Aerial Vehicle-Based Compressed Data Acquisition for Environmental Monitoring in WSNs. Sensors, 23(20), 8546. https://doi.org/10.3390/s23208546