

Designing UAV Swarm Experiments: A Simulator Selection and Experiment Design Process


Abstract
:1. Introduction
- (1)
- Creating inter-agent and global policies for path planning, swarm movement, and collision avoidance using techniques such as artificial potential fields and bioinspired pheromone maps.
- (2)
- Creating swarm agent-specific SAR (Search and Rescue) frameworks that focus on improving operational swarm resilience rather than external operations.
- (3)
- Examining the impacts to swarm dynamics and performance on the introduction of heterogeneous agents in the UAV swarm.
2. Background and Motivation
3. Generalized Swarm Process Consideration during Development
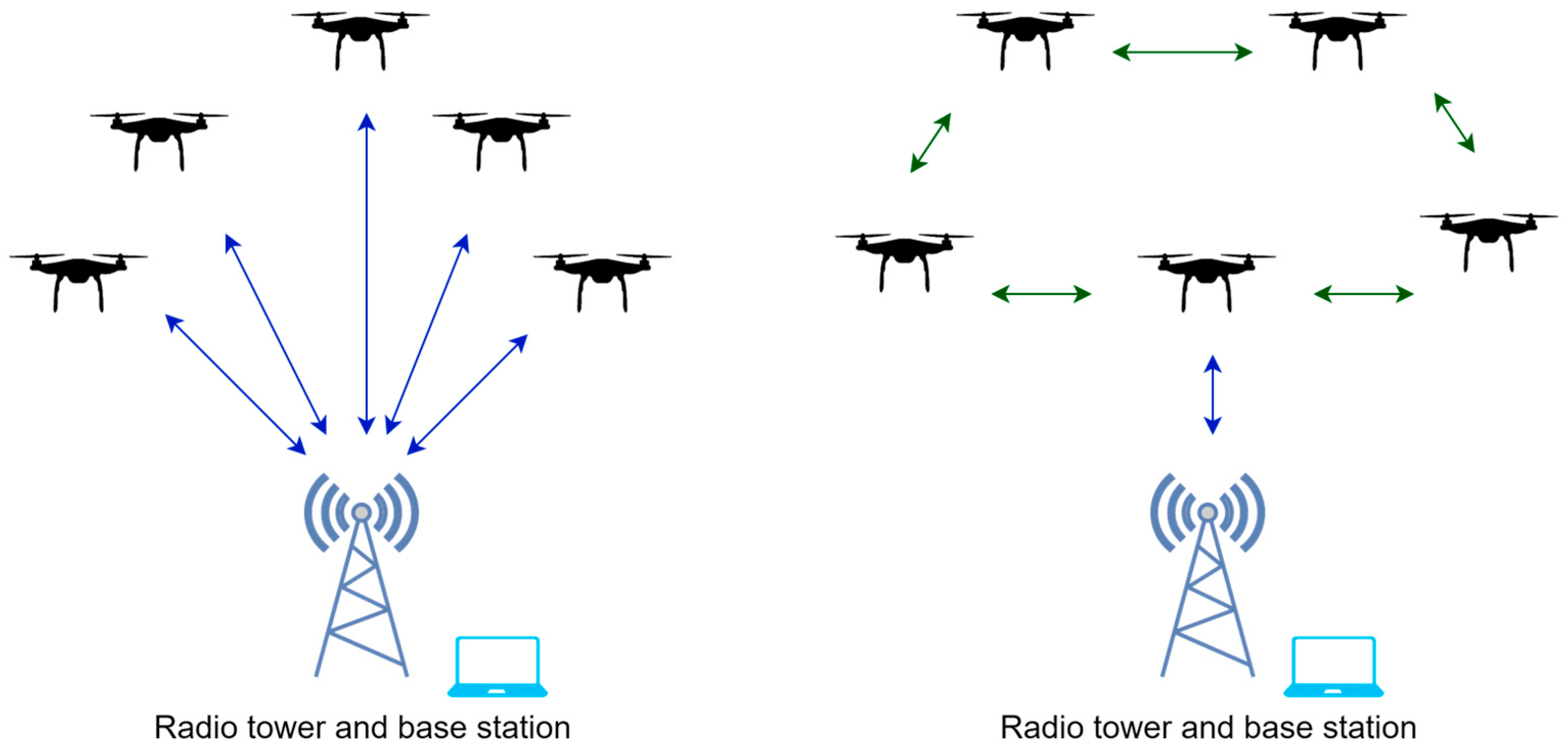
3.1. Network Topologies and Communication
3.2. Deployment Strategies
3.3. Swarm Formation Control Strategies
3.4. Swarm Composition and Vehicle Characteristics
4. Simulator Selection and Experimental Design
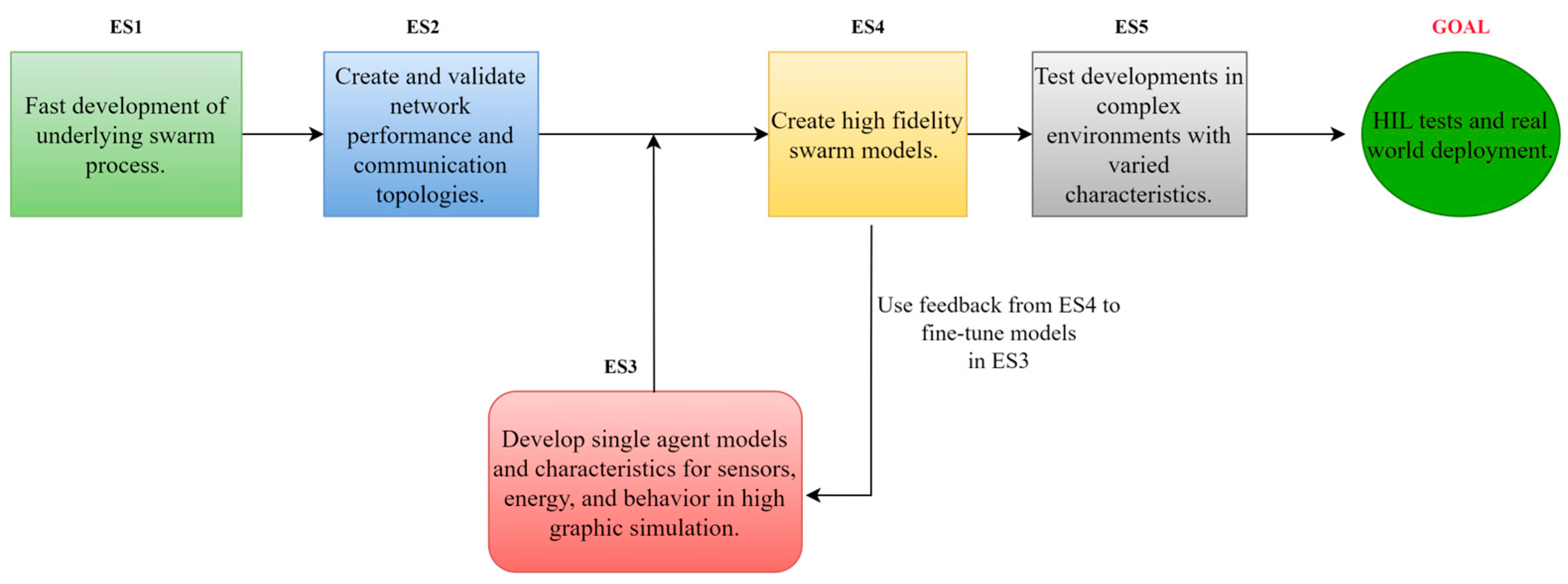
5. Experiment Descriptions
6. Future Work
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ANNs | Artificial Neural Networks |
| APF | Artificial Potential Field |
| AODV | Ad Hoc On demand Distance Vector |
| D2D | Device to Device |
| DOF | Degree of Freedom |
| ES | Experiment Series |
| FANET | Flying Ad Hoc Networks |
| GNSS | Global Navigation Satellite System |
| IDS | Intrusion Detection System |
| MAV | Micro Air Vehicle |
| MPC | Model Predictive Control |
| MANET | Mobile Ad Hoc Network |
| PSO | Particle Swarm Optimization |
| POV | Point Of View |
| ROI | Region of Interest |
| RID | Remote Identification |
| SAR | Search and Rescue |
| UAV | Unmanned Aerial Vehicle |
| UGV | Unmanned Ground Vehicle |
| USV | Unmanned Surface Vehicle |
| UAS | Unmanned Aircraft System |
| UWSV | Unmanned Water Surface Vehicle |
References
- Zhang, X.; Zhao, W.; Liu, C.; Li, J. Distributed Multi-Target Search and Surveillance Mission Planning for Unmanned Aerial Vehicles in Uncertain Environments. Drones 2023, 7, 355. [Google Scholar] [CrossRef]
- Machovec, D.; Siegel, H.J.; Crowder, J.A.; Pasricha, S.; Maciejewski, A.A.; Friese, R.D. Surveillance mission scheduling with unmanned aerial vehicles in dynamic heterogeneous environments. J. Supercomput. 2023, 79, 13864–13888. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A Compilation of UAV Applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Gans, N.R.; Rogers, J.G. Cooperative Multirobot Systems for Military Applications. Curr. Robot. Rep. 2021, 2, 105–111. [Google Scholar] [CrossRef]
- Cao, Y.; Qi, F.; Jing, Y.; Zhu, M.; Lei, T.; Li, Z.; Xia, J.; Wang, J.; Lu, G. Mission Chain Driven Unmanned Aerial Vehicle Swarms Cooperation for the Search and Rescue of Outdoor Injured Human Targets. Drones 2022, 6, 138. [Google Scholar] [CrossRef]
- Bakacsy, L.; Tobak, Z.; van Leeuwen, B.; Szilassi, P.; Biró, C.; Szatmári, J. Drone-Based Identification and Monitoring of Two Invasive Alien Plant Species in Open Sand Grasslands by Six RGB Vegetation Indices. Drones 2023, 7, 207. [Google Scholar] [CrossRef]
- Guan, S.; Sirianni, H.; Wang, G.; Zhu, Z. sUAS Monitoring of Coastal Environments: A Review of Best Practices from Field to Lab. Drones 2022, 6, 142. [Google Scholar] [CrossRef]
- Wheeb, A.H.; Nordin, R.; Samah, A.A.; Alsharif, M.H.; Khan, M.A. Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions. Drones 2021, 6, 9. [Google Scholar] [CrossRef]
- Park, M.; Lee, S.; Lee, S. Dynamic Topology Reconstruction Protocol for UAV Swarm Networking. Symmetry 2020, 12, 1111. [Google Scholar] [CrossRef]
- Kent, T.; Richards, A.; Johnson, A. Homogeneous Agent Behaviours for the Multi-Agent Simultaneous Searching and Routing Problem. Drones 2022, 6, 51. [Google Scholar] [CrossRef]
- Deng, H.; Huang, J.; Liu, Q.; Zhao, T.; Zhou, C.; Gao, J. A Distributed Collaborative Allocation Method of Reconnaissance and Strike Tasks for Heterogeneous UAVs. Drones 2023, 7, 138. [Google Scholar] [CrossRef]
- Flores Pena, P.; Luna, M.A.; Ale Isaac, M.S.; Ragab, A.R.; Elmenshawy, K.; Martin Gomez, D.; Campoy, P.; Molina, M. A Proposed System for Multi-UAVs in Remote Sensing Operations. Sensors 2022, 22, 9180. [Google Scholar] [CrossRef] [PubMed]
- Phadke, A.; Medrano, A. A Resilient Multi-UAV System of Systems (SoS). Acad. Lett. 2021, 2, 2771–9359. [Google Scholar] [CrossRef]
- Phadke, A.; Medrano, F.A. Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms. Drones 2022, 6, 340. [Google Scholar] [CrossRef]
- Phadke, A.; Antonio Medrano, F.; Chu, T. Engineering resiliency in UAV swarms–A bibliographic analysis. J. Physics Conf. Ser. 2022, 2330, 012007. [Google Scholar] [CrossRef]
- Dias, P.G.F.; Silva, M.C.; Rocha Filho, G.P.; Vargas, P.A.; Cota, L.P.; Pessin, G. Swarm Robotics: A Perspective on the Latest Reviewed Concepts and Applications. Sensors 2021, 21, 2062. [Google Scholar] [CrossRef]
- Scholtes, M.; Westhofen, L.; Turner, L.R.; Lotto, K.; Schuldes, M.; Weber, H.; Wagener, N.; Neurohr, C.; Bollmann, M.H.; Kortke, F.; et al. 6-Layer Model for a Structured Description and Categorization of Urban Traffic and Environment. IEEE Access 2021, 9, 59131–59147. [Google Scholar] [CrossRef]
- Pitonakova, L.; Giuliani, M.; Pipe, A.; Winfield, A. Feature and Performance Comparison of the V-REP, Gazebo and ARGoS Robot Simulators. In Towards Autonomous Robotic Systems; Springer: Cham, Switzerland, 2018; pp. 357–368. [Google Scholar]
- Calderón-Arce, C.; Brenes-Torres, J.C.; Solis-Ortega, R. Swarm Robotics: Simulators, Platforms and Applications Review. Computation 2022, 10, 80. [Google Scholar] [CrossRef]
- Tselegkaridis, S.; Sapounidis, T. Simulators in Educational Robotics: A Review. Educ. Sci. 2021, 11, 11. [Google Scholar] [CrossRef]
- Mairaj, A.; Baba, A.I.; Javaid, A.Y. Application specific drone simulators: Recent advances and challenges. Simul. Model. Pract. Theory 2019, 94, 100–117. [Google Scholar] [CrossRef]
- Carpin, S.; Lewis, M.; Wang, J.; Balakirsky, S.; Scrapper, C. USARSim: A robot simulator for research and education. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1400–1405. [Google Scholar]
- Rohmer, E.; Singh, S.P.N.; Freese, M. CoppeliaSim (formerly V-REP): A Versatile and Scalable Robot Simulation Framework. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1321–1326. [Google Scholar] [CrossRef]
- Shah, S.; Dey, D.; Lovett, C.; Kapoor, A. AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles. In Proceedings of the 11th Conference on Field and Service Robotics, Zürich, Switzerland, 13–15 September 2017. [Google Scholar]
- Arafat, M.Y.; Moh, S. Routing Protocols for Unmanned Aerial Vehicle Networks: A Survey. IEEE Access 2019, 7, 99694–99720. [Google Scholar] [CrossRef]
- Stepanyants, V.; Romanov, A. Analysis of Requirements for Next-Generation Complex Urban and Transportation System Simulation. In Proceedings of the 2022 Dynamics of Systems, Mechanisms and Machines (Dynamics), Omsk, Russia, 15–17 November 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Poudel, S.; Arafat, M.Y.; Moh, S. Bio-Inspired Optimization-Based Path Planning Algorithms in Unmanned Aerial Vehicles: A Survey. Sensors 2023, 23, 3051. [Google Scholar] [CrossRef] [PubMed]
- Quan, Q.; Dai, X.; Wang, S. Multicopter Design and Control Practice: A Series Experiments Based on MATLAB and Pixhawk; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Pinciroli, C.; Trianni, V.; O’Grady, R.; Pini, G.; Brutschy, A.; Brambilla, M.; Mathews, N.; Ferrante, E.; Di Caro, G.; Ducatelle, F.; et al. ARGoS: A modular, parallel, multi-engine simulator for multi-robot systems. Swarm Intell. 2012, 6, 271–295. [Google Scholar] [CrossRef]
- Marconato, E.A.; Rodrigues, M.; Pires, R.M.; Pigatto, D.F.; Filho, L.C.Q.; Pinto, A.S.R.; Branco, K.R.L.J.C. AVENS–A Novel Flying Ad Hoc Network Simulator with Automatic Code Generation for Unmanned Aircraft System. In Proceedings of the Hawaii International Conference on System Sciences (HICSS), Waikoloa Village, HI, USA, 4–7 January 2017. [Google Scholar]
- Echeverria, G.; Lassabe, N.; Degroote, A.; Lemaignan, S.e. Modular Open Robots Simulation Engine: MORSE. In Proceedings of the International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar] [CrossRef]
- Xue, K.; Wu, T. Distributed Consensus of USVs under Heterogeneous UAV-USV Multi-Agent Systems Cooperative Control Scheme. J. Mar. Sci. Eng. 2021, 9, 1314. [Google Scholar] [CrossRef]
- Huang, K.; Chen, J.; Oyekan, J. Decentralised aerial swarm for adaptive and energy efficient transport of unknown loads. Swarm Evol. Comput. 2021, 67, 100957. [Google Scholar] [CrossRef]
- Xie, Y.; Han, L.; Dong, X.; Li, Q.; Ren, Z. Bio-inspired adaptive formation tracking control for swarm systems with application to UAV swarm systems. Neurocomputing 2021, 453, 272–285. [Google Scholar] [CrossRef]
- Schilling, F.; Schiano, F.; Floreano, D. Vision-Based Drone Flocking in Outdoor Environments. IEEE Robot. Autom. Lett. 2021, 6, 2954–2961. [Google Scholar] [CrossRef]
- Madridano, Á.; Al-Kaff, A.; Flores, P.; Martín, D.; de la Escalera, A. Software Architecture for Autonomous and Coordinated Navigation of UAV Swarms in Forest and Urban Firefighting. Appl. Sci. 2021, 11, 1258. [Google Scholar] [CrossRef]
- Hong, Y.; Jung, S.; Kim, S.; Cha, J. Autonomous Mission of Multi-UAV for Optimal Area Coverage. Sensors 2021, 21, 2482. [Google Scholar] [CrossRef]
- Elmokadem, T.; Savkin, A. Computationally-Efficient Distributed Algorithms of Navigation of Teams of Autonomous UAVs for 3D Coverage and Flocking. Drones 2021, 5, 124. [Google Scholar] [CrossRef]
- Godio, S.; Primatesta, S.; Guglieri, G.; Dovis, F. A Bioinspired Neural Network-Based Approach for Cooperative Coverage Planning of UAVs. Information 2021, 12, 51. [Google Scholar] [CrossRef]
- Liu, L.; Qian, H.; Hu, F. Random Label Based Security Authentication Mechanism for Large-Scale UAV Swarm. In Proceedings of the 2019 IEEE International Conference on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking (ISPA/BDCloud/SocialCom/SustainCom), Xiamen, China, 16–18 December 2019; pp. 229–235. [Google Scholar] [CrossRef]
- Bezas, K.; Tsoumanis, G.; Angelis, C.T.; Oikonomou, K. Coverage Path Planning and Point-of-Interest Detection Using Autonomous Drone Swarms. Sensors 2022, 22, 7551. [Google Scholar] [CrossRef] [PubMed]
- Stolfi, D.H.; Danoy, G. An Evolutionary Algorithm to Optimise a Distributed UAV Swarm Formation System. Appl. Sci. 2022, 12, 10218. [Google Scholar] [CrossRef]
- Stolfi, D.H.; Brust, M.R.; Danoy, G.; Bouvry, P. SuSy-EnGaD: Surveillance System Enhanced by Games of Drones. Drones 2022, 6, 13. [Google Scholar] [CrossRef]
- Lamenza, T.; Paulon, M.; Perricone, B.; Olivieri, B.; Endler, M. Gradys-Sim–A Omnet++/Inet Simulation Framework for Internet of Flying Things. arXiv 2022, arXiv:2202.08134. [Google Scholar]
- Gu, X.; He, F.; Wang, R.; Chen, L.; Xu, J. Group Mobility Model for Complex Multimission Cooperation of UAV Swarm. Int. J. Aerosp. Eng. 2022, 2022, 5261663. [Google Scholar] [CrossRef]
- Lee, H.S.; Shin, B.S.; Thomasson, J.A.; Wang, T.; Zhang, Z.; Han, X. Development of Multiple UAV Collaborative Driving Systems for Improving Field Phenotyping. Sensors 2022, 22, 1423. [Google Scholar] [CrossRef]
- Campo, L.V.; Ledezma, A.; Corrales, J.C. MCO Plan: Efficient Coverage Mission for Multiple Micro Aerial Vehicles Modeled as Agents. Drones 2022, 6, 181. [Google Scholar] [CrossRef]
- Guo, Y.; Tang, H.; Qin, R. A Low Complexity Persistent Reconnaissance Algorithm for FANET. Sensors 2022, 22, 9526. [Google Scholar] [CrossRef]
- Wang, C.; Shi, Z.; Gu, M.; Luo, W.; Zhu, X.; Fan, Z. Revolutionary entrapment model of uniformly distributed swarm robots in morphogenetic formation. Def. Technol. 2022. [Google Scholar] [CrossRef]
- Gui, J.; Yu, T.; Deng, B.; Zhu, X.; Yao, W. Decentralized Multi-UAV Cooperative Exploration Using Dynamic Centroid-Based Area Partition. Drones 2023, 7, 337. [Google Scholar] [CrossRef]
- Subbarayalu, V.; Vensuslaus, M.A. An Intrusion Detection System for Drone Swarming Utilizing Timed Probabilistic Automata. Drones 2023, 7, 248. [Google Scholar] [CrossRef]
- Memon, S.A.; Son, H.; Kim, W.-G.; Khan, A.M.; Shahzad, M.; Khan, U. Tracking Multiple Unmanned Aerial Vehicles through Occlusion in Low-Altitude Airspace. Drones 2023, 7, 241. [Google Scholar] [CrossRef]
- Shan, L.; Li, H.-B.; Miura, R.; Matsuda, T.; Matsumura, T. A Novel Collision Avoidance Strategy with D2D Communications for UAV Systems. Drones 2023, 7, 283. [Google Scholar] [CrossRef]
- Wheeb, A.H.; Nordin, R.; Samah, A.A.; Kanellopoulos, D. Performance Evaluation of Standard and Modified OLSR Protocols for Uncoordinated UAV Ad-Hoc Networks in Search and Rescue Environments. Electronics 2023, 12, 1334. [Google Scholar] [CrossRef]
- Li, B.; Song, C.; Bai, S.; Huang, J.; Ma, R.; Wan, K.; Neretin, E. Multi-UAV Trajectory Planning during Cooperative Tracking Based on a Fusion Algorithm Integrating MPC and Standoff. Drones 2023, 7, 196. [Google Scholar] [CrossRef]
- Pasandideh, F.; Cesen, F.E.R.; Pereira, P.H.M.; Rothenberg, C.E.; de Freitas, E.P. An Improved Particle Swarm Optimization Algorithm for UAV Base Station Placement. Wirel. Pers. Commun. 2023, 130, 1343–1370. [Google Scholar] [CrossRef]
- Davoli, L.; Pagliari, E.; Ferrari, G. Hybrid LoRa-IEEE 802.11s Opportunistic Mesh Networking for Flexible UAV Swarming. Drones 2021, 5, 26. [Google Scholar] [CrossRef]
- Wolf, S.; Cooley, R.; Fantl, J.; Borowczak, M. Secure and Resilient Swarms: Autonomous Decentralized Lightweight UAVs to the Rescue. IEEE Consum. Electron. Mag. 2020, 9, 34–40. [Google Scholar] [CrossRef]
- Airlangga, G.; Liu, A. A Study of the Data Security Attack and Defense Pattern in a Centralized UAV–Cloud Architecture. Drones 2023, 7, 289. [Google Scholar] [CrossRef]
- Abubakar, A.I.; Ahmad, I.; Omeke, K.G.; Ozturk, M.; Ozturk, C.; Abdel-Salam, A.M.; Mollel, M.S.; Abbasi, Q.H.; Hussain, S.; Imran, M.A. A Survey on Energy Optimization Techniques in UAV-Based Cellular Networks: From Conventional to Machine Learning Approaches. Drones 2023, 7, 214. [Google Scholar] [CrossRef]
- Nguyen, M.-N.; Nguyen, L.D.; Duong, T.Q.; Tuan, H.D. Real-Time Optimal Resource Allocation for Embedded UAV Communication Systems. IEEE Wirel. Commun. Lett. 2019, 8, 225–228. [Google Scholar] [CrossRef]
- Kashino, Z.; Nejat, G.; Benhabib, B. A Hybrid Strategy for Target Search Using Static and Mobile Sensors. IEEE Trans. Cybern. 2020, 50, 856–868. [Google Scholar] [CrossRef]
- Phadke, A.; Medrano, F.A.; Ustymenko, S. A Review of Vehicular Micro-Clouds. In Proceedings of the 2021 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 15–17 December 2021; pp. 411–417. [Google Scholar] [CrossRef]
- Cho, S.-W.; Park, J.-H.; Park, H.-J.; Kim, S. Multi-UAV Coverage Path Planning Based on Hexagonal Grid Decomposition in Maritime Search and Rescue. Mathematics 2021, 10, 83. [Google Scholar] [CrossRef]
- Recchiuto, C.T.; Sgorbissa, A. Post-disaster assessment with unmanned aerial vehicles: A survey on practical implementations and research approaches. J. Field Robot. 2018, 35, 459–490. [Google Scholar] [CrossRef]
- Rogers, A.; Eshaghi, K.; Nejat, G.; Benhabib, B. Occupancy Grid Mapping via Resource-Constrained Robotic Swarms: A Collaborative Exploration Strategy. Robotics 2023, 12, 70. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, X.; Jiang, W.; Zhang, W. Collision-Free 4D Dynamic Path Planning for Multiple UAVs Based on Dynamic Priority RRT* and Artificial Potential Field. Drones 2023, 7, 180. [Google Scholar] [CrossRef]
- Zhang, Y.; Feng, W.; Shi, G.; Jiang, F.; Chowdhury, M.; Ling, S.H. UAV Swarm Mission Planning in Dynamic Environment Using Consensus-Based Bundle Algorithm. Sensors 2020, 20, 2307. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Q.; Pan, N.; Sun, Y.; Yang, Y. Three-Dimensional Mountain Complex Terrain and Heterogeneous Multi-UAV Cooperative Combat Mission Planning. IEEE Access 2020, 8, 197407–197419. [Google Scholar] [CrossRef]
- Shi, W.; Wang, S.; Yue, H.; Wang, D.; Ye, H.; Sun, L.; Sun, J.; Liu, J.; Deng, Z.; Rao, Y.; et al. Identifying Tree Species in a Warm-Temperate Deciduous Forest by Combining Multi-Rotor and Fixed-Wing Unmanned Aerial Vehicles. Drones 2023, 7, 353. [Google Scholar] [CrossRef]
- Gomes, J.; Mariano, P.; Christensen, A.L. Cooperative Coevolution of Partially Heterogeneous Multiagent Systems. In Proceedings of the International Conference on Autonomous Agents and Multiagent Systems, Istanbul, Turkey, 4–8 May 2015. [Google Scholar]
- Mahendran, A.; Dewan, A.; Soni, N.; Krishna, K.M. UGV-MAV Collaboration for Augmented 2D Maps. In Proceedings of the Conference on Advances in Robotics, Pune, India, 4–6 July 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Stolfi, D.H.; Brust, M.R.; Danoy, G.; Bouvry, P. UAV-UGV-UMV Multi-Swarms for Cooperative Surveillance. Front. Robot. AI 2021, 8, 616950. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Du, C.; Zhang, Y.; Han, P.; Wei, W. A Clustering-Based Coverage Path Planning Method for Autonomous Heterogeneous UAVs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 25546–25556. [Google Scholar] [CrossRef]
- Chen, M.; Zeng, F.; Xiong, X.; Zhang, X.; Chen, Z. A maritime emergency search and rescue system based on unmanned aerial vehicle and its landing platform. In Proceedings of the 2021 IEEE International Conference on Electrical Engineering and Mechatronics Technology (ICEEMT), Qingdao, China, 2–4 July 2021; pp. 758–761. [Google Scholar] [CrossRef]
- Chen, S.; Jiang, B.; Pang, T.; Xu, H.; Gao, M.; Ding, Y.; Wang, X. Firefly swarm intelligence based cooperative localization and automatic clustering for indoor FANETs. PLoS ONE 2023, 18, e0282333. [Google Scholar] [CrossRef]
- Abdulhae, O.T.; Mandeep, J.S.; Islam, M. Cluster-Based Routing Protocols for Flying Ad Hoc Networks (FANETs). IEEE Access 2022, 10, 32981–33004. [Google Scholar] [CrossRef]
- Bitcraze. Crazyflie 2.0 Product Specification and Manual. Available online: https://www.bitcraze.io/products/old-products/crazyflie-2-0/ (accessed on 15 June 2023).
- DJI. DJI Mavic 2 Pro Product Page and Specifications. Available online: https://www.dji.com/mavic-2 (accessed on 15 June 2023).
- Zhou, Y.; Song, D.; Ding, B.; Rao, B.; Su, M.; Wang, W. Ant Colony Pheromone Mechanism-Based Passive Localization Using UAV Swarm. Remote Sens. 2022, 14, 2944. [Google Scholar] [CrossRef]
- You, W.; Dong, C.; Cheng, X.; Zhu, X.; Wu, Q.; Chen, G. Joint Optimization of Area Coverage and Mobile-Edge Computing With Clustering for FANETs. IEEE Internet Things J. 2021, 8, 695–707. [Google Scholar] [CrossRef]
- Mansour, H.S.; Mutar, M.H.; Aziz, I.A.; Mostafa, S.A.; Mahdin, H.; Abbas, A.H.; Hassan, M.H.; Abdulsattar, N.F.; Jubair, M.A. Cross-Layer and Energy-Aware AODV Routing Protocol for Flying Ad-Hoc Networks. Sustainability 2022, 14, 8980. [Google Scholar] [CrossRef]
- Maakar, S.K.; Khurana, M.; Chakraborty, C.; Sinwar, D.; Srivastava, D. Performance Evaluation of AODV and DSR Routing Protocols for Flying Ad hoc Network Using Highway Mobility Model. J. Circuits Syst. Comput. 2022, 31, 2250008. [Google Scholar] [CrossRef]
- Tan, X.; Zuo, Z.; Su, S.; Guo, X.; Sun, X. Research of Security Routing Protocol for UAV Communication Network Based on AODV. Electronics 2020, 9, 1185. [Google Scholar] [CrossRef]
- Zhang, N.; Nex, F.; Vosselman, G.; Kerle, N. Training a Disaster Victim Detection Network for UAV Search and Rescue Using Harmonious Composite Images. Remote Sens. 2022, 14, 2977. [Google Scholar] [CrossRef]
- Khalil, H.; Rahman, S.U.; Ullah, I.; Khan, I.; Alghadhban, A.J.; Al-Adhaileh, M.H.; Ali, G.; ElAffendi, M. A UAV-Swarm-Communication Model Using a Machine-Learning Approach for Search-and-Rescue Applications. Drones 2022, 6, 372. [Google Scholar] [CrossRef]
- Pikun, W.; Ling, W.; Jiangxin, Q.; Jiashuai, D. Unmanned aerial vehicles object detection based on image haze removal under sea fog conditions. IET Image Process. 2022, 16, 2709–2721. [Google Scholar] [CrossRef]
- MathWorks MATLAB Hardware Team. MATLAB Support Package for Ryze Tello Drones; Publisher MathWorks: Natick, MA, USA, 2023; Available online: https://www.mathworks.com/help/supportpkg/ryzeio/ (accessed on 5 June 2023).
- Robolink. Available online: https://www.robolink.com/products/codrone-edu (accessed on 26 July 2023).
- FAA. Remote Identification of Unmanned Aircraft-Final Rule. 2023. Available online: https://www.faa.gov/sites/faa.gov/files/2021-08/RemoteID_Final_Rule.pdf (accessed on 15 June 2023).
- Phadke, A.; Boyd, J.; Medrano, F.A.; Starek, M. Navigating the skies: Examining the FAA’s remote identification rule for unmanned aircraft systems. Drone Syst. Appl. 2023, 11, 1–4. [Google Scholar] [CrossRef]
- Gu, W.; Valavanis, K.P.; Rutherford, M.J.; Rizzo, A. UAV Model-based Flight Control with Artificial Neural Networks: A Survey. J. Intell. Robot. Syst. 2020, 100, 1469–1491. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Published Year | Description |
|---|---|---|
| [18] | 2018 | Comparing the performance of three popular robot simulators. |
| [21] | 2019 | Survey on UAV simulators, their features, and architecture. |
| [16] | 2021 | Survey on robotic simulators, platforms, and frameworks, with a distinction between the three terms. |
| [20] | 2021 | An overview of robotic simulators suitable for use in education. |
| [19] | 2022 | Review on swarm-focused simulators, real-life hardware, and applications. |
| This study | 2023 | An updated and comprehensive examination of simulation platforms capable of handling UAVs with an accompanying experimental design process for swarm-based research objectives. |
| Name | OS Support 1 | UAV Specific? | Possibility of Cross-Platform Connectivity 2 | Notable Publication by Platform Creators | Remarks |
|---|---|---|---|---|---|
| Gazebo | W *, M *, L | No | Yes | — | — |
| Webots | W, M, L | No | Yes | — | Independent simulation platform with support for various robot platforms. |
| CoppeliaSim | W, M, L | No | Yes | [23] | Formerly known as VREP. |
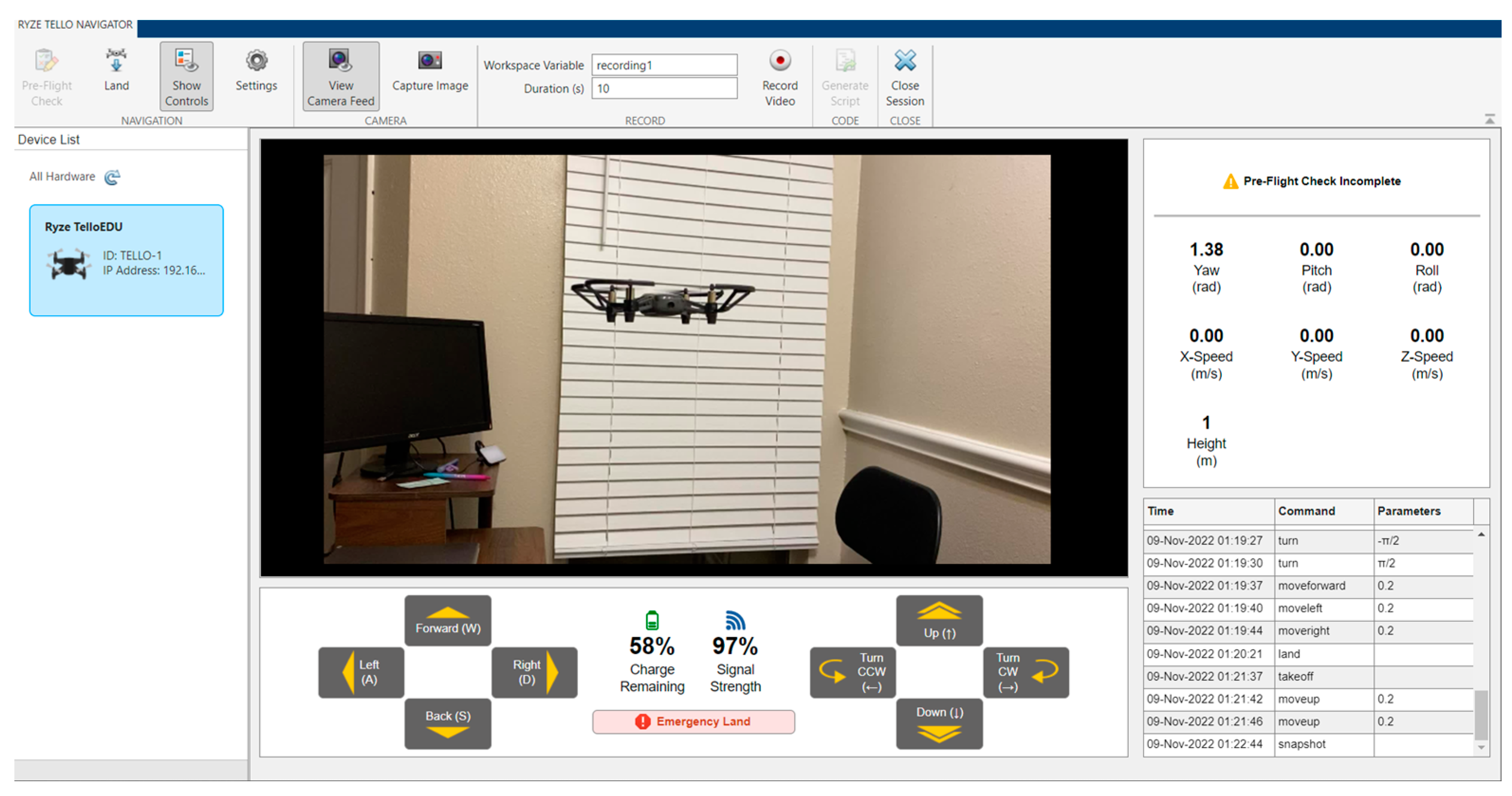
| UAV toolbox (MATLAB) | W, M, L * | No | Yes | — | Although MATLAB is not UAV specific, the UAV toolbox is designed for UAV development. |
| RflySim | W | No | Yes | [28] | Independent simulation platform inspired by PX4 and MATLAB simulation platform. |
| ARGoS | M *, L | No | Yes+ | [29] | Multiphysics robot simulator. |
| OMNET++ | W, M, L | No | Yes | — | Discrete event simulation platform focused on networking and communication. |
| AVENS | W | Yes | Yes | [30] | Works with the OMNET++ network simulator and X-Plane flight simulator. |
| MORSE | W *, M *, L * | No | Yes | [31] | — |
| Reference | Year Published | Study Description | Platform Used 1 |
|---|---|---|---|
| [32] | 2021 | Formation control of heterogeneous UAV and USV swarms. | CoppeliaSim |
| [33] | 2021 | Architecture of UAV swarm to find a load and transport it to its destination cooperatively. | CoppeliaSim |
| [34] | 2021 | Adaptive formation control for UAV swarms with multiple leaders and switching topologies. | Gazebo |
| [35] | 2021 | Control of UAV agents in a swarm using vision-based approaches. | Gazebo |
| [36] | 2021 | Development of control layers to enable the autonomous and cooperative navigation of a swarm of UAVs. | Gazebo |
| [37] | 2021 | Optimized area coverage by autonomous multi-UAV. | Gazebo + MATLAB |
| [38] | 2021 | Approach to address coverage and flocking problems in multi-UAV. | Gazebo |
| [39] | 2021 | Bioinspired neural network for cooperative planning of multi-UAV. | Gazebo |
| [40] | 2021 | Safe allocation of UAV swarm mission resources based on random labels. | OMNET++ |
| [41] | 2022 | Coverage and path planning algorithm for swarms to detect points of interest and collect information from them. | OMNET++ |
| [42] | 2022 | A distributed UAV swarm formation system optimized by a hybrid evolutionary algorithm. | ARGoS |
| [43] | 2022 | Approach to optimized UAV swarm for improved intruder detection. | ArGoS |
| [44] | 2022 | A framework for simulating cooperative UAV swarms performing joint missions. | OMNET++ |
| [45] | 2022 | Task decomposition and task correlation of UAV swarm | OMNET++ |
| [46] | 2022 | Multiple UAVs collaborating for improved field phenotyping. | Gazebo |
| [47] | 2022 | Resource balancing for MAV (Mobile Aerial Vehicle). | Gazebo |
| [48] | 2022 | Development of a PSO-based threat avoidance and reconnaissance FANET. | Gazebo |
| [49] | 2022 | Entrap multiple targets using a robot swarm. | MATLAB + CoppeliaSim |
| [50] | 2023 | A decentralized method for multiple UAVs to explore separate areas. | Gazebo |
| [51] | 2023 | A novel IDS (Intrusion Detection System) that identifies deviation in normal UAV behaviors as means of indicating external threats. | Gazebo |
| [52] | 2023 | A multiple tracking methodology for aircraft at low altitudes. | MATLAB |
| [53] | 2023 | Collision avoidance strategy for D2D (Device to Device) communications in UAV networks. | MATLAB |
| [54] | 2023 | Evaluation of routing protocols in UAV ad hoc networks in SAR scenarios | MATLAB |
| [1] | 2023 | Autonomous cooperative mission planning for multiple UAVs conducting surveillance missions. | MATLAB |
| [55] | 2023 | Trajectory planning and formation maintenance in swarm using MPC and standoff algorithm. | MATLAB |
| [56] | 2023 | An improved PSO for optimized base station placement for UAVs. | CoppeliaSim |
| Experiment Series (ES) | Description | Target Mechanisms Developed and Observed | Simulation Tools Used |
|---|---|---|---|
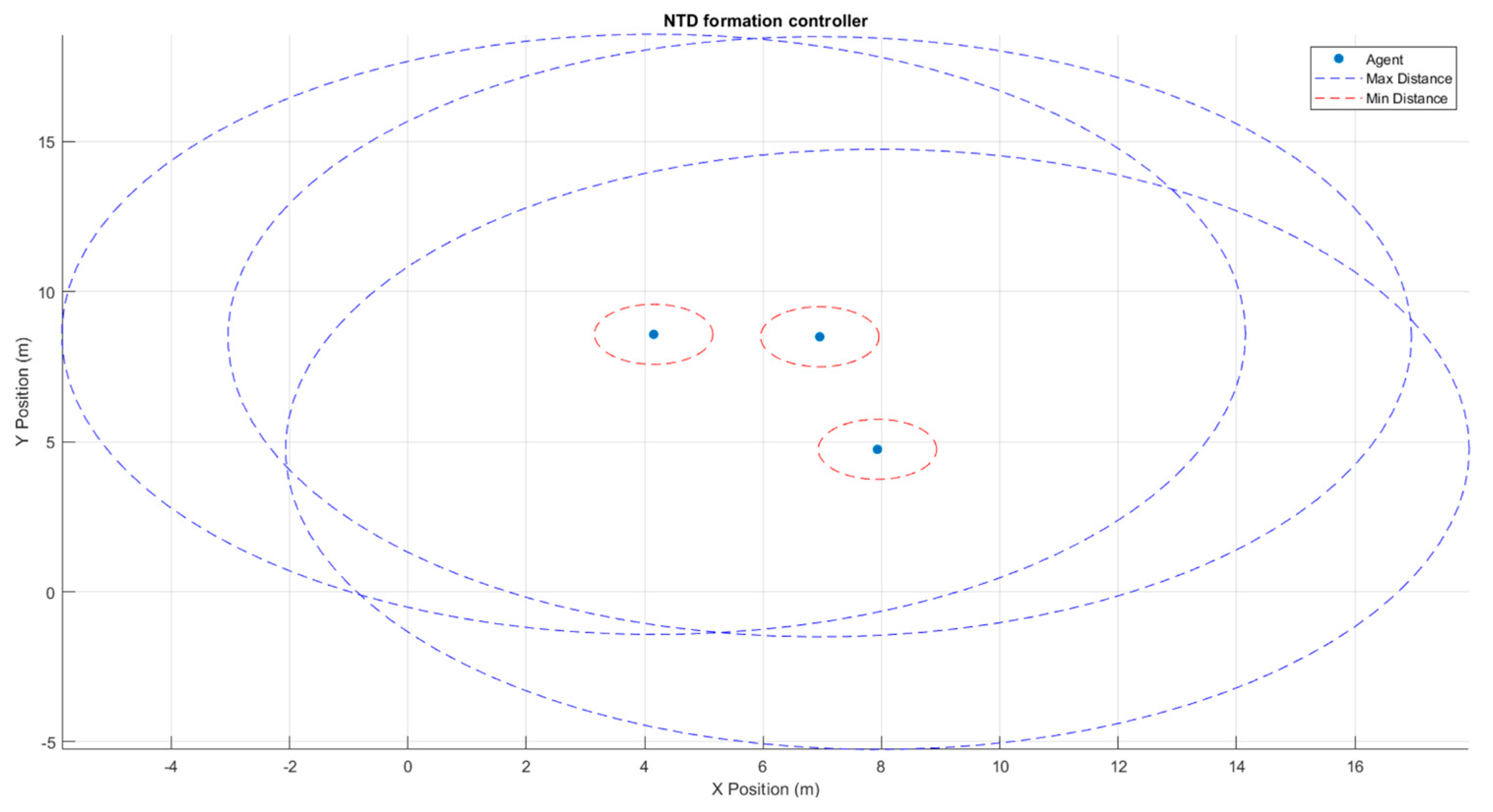
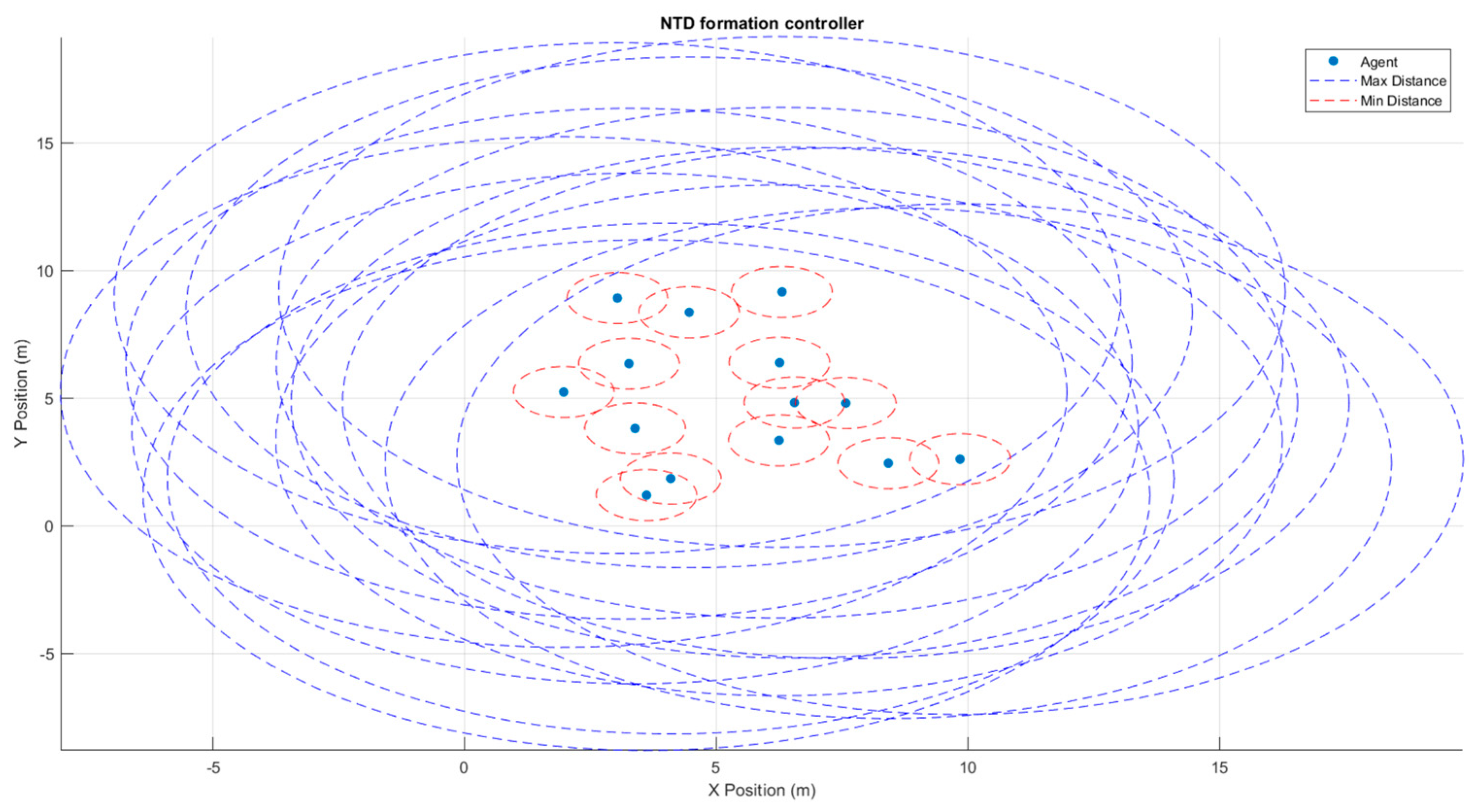
| 1 | Basic swarm phenomenon observation | Flocking maneuvers, 2D path planning. | MATLAB UAV Scenario Designer |
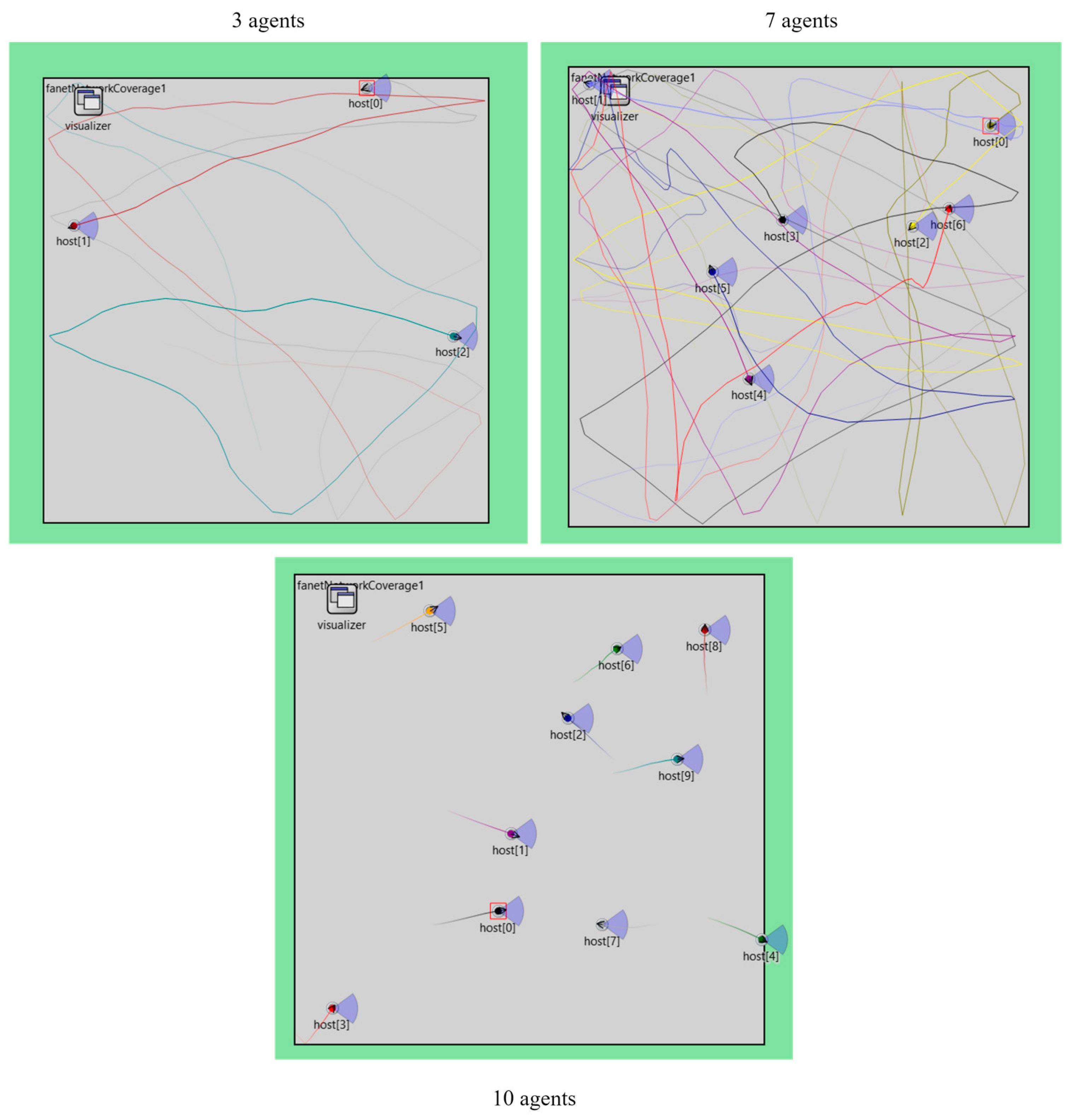
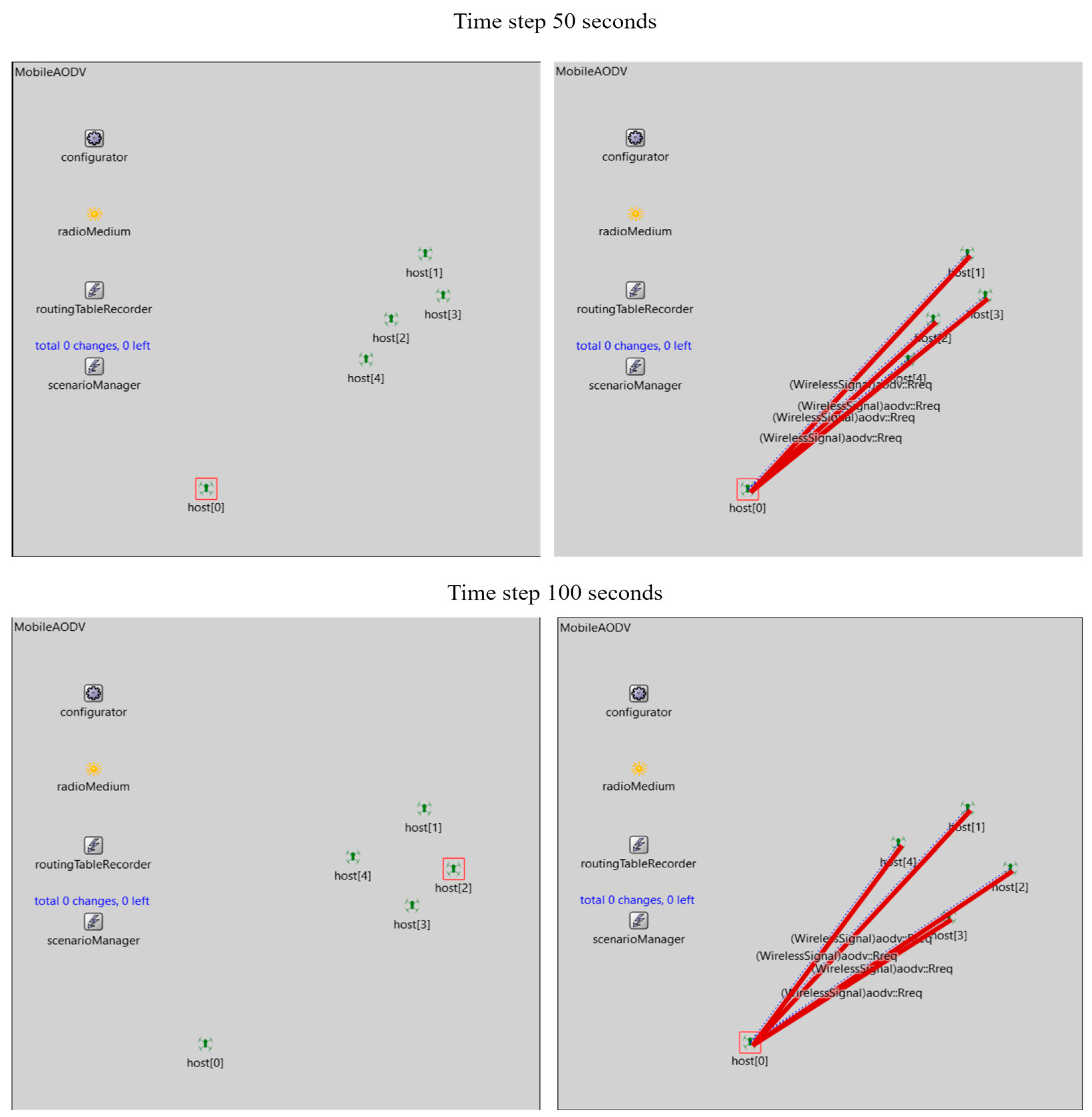
| 2 | Studying FANET topology and performance. | Examine inter-agent communication process, equipment range, and routing protocols. | OMNET++ and associated plugins. |
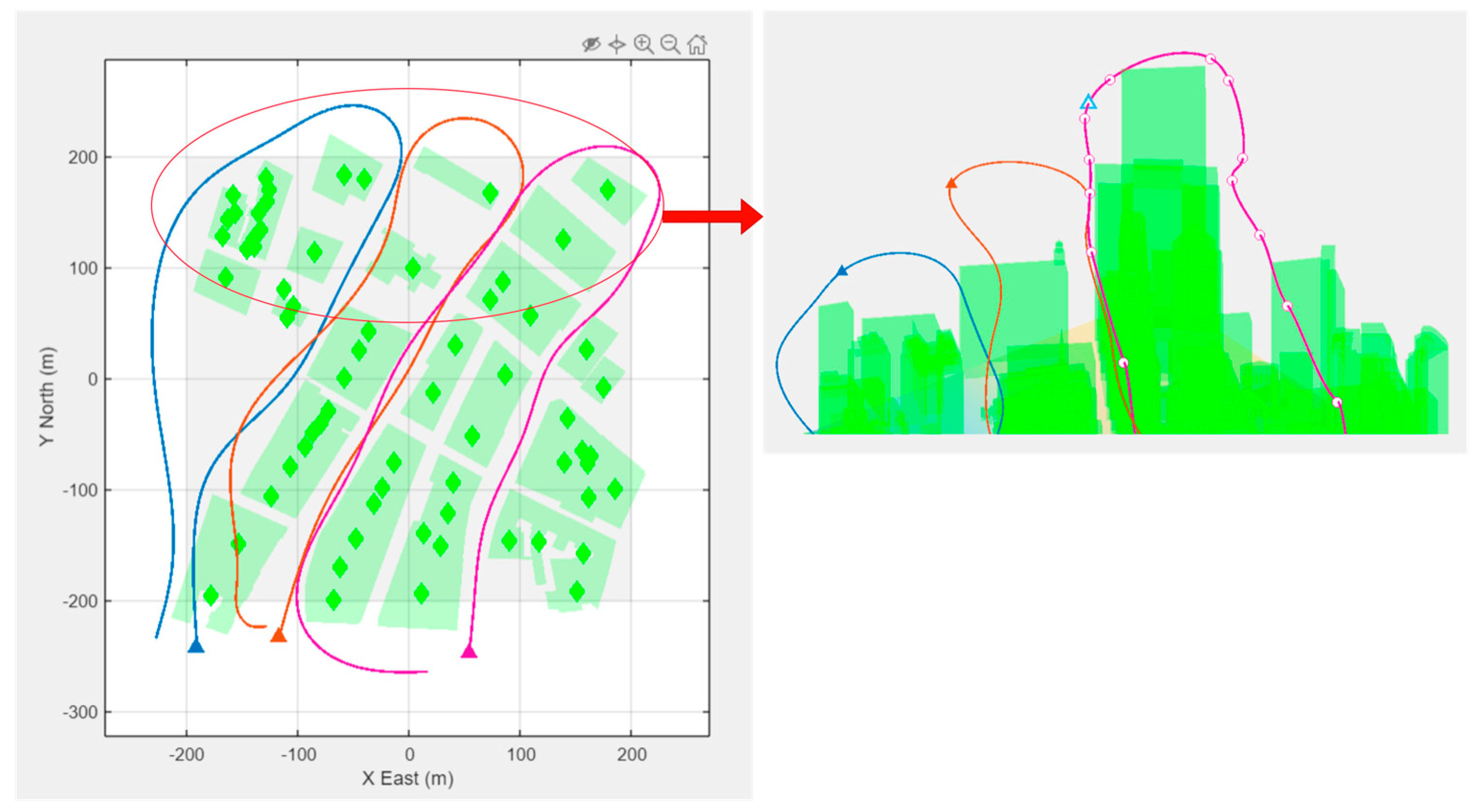
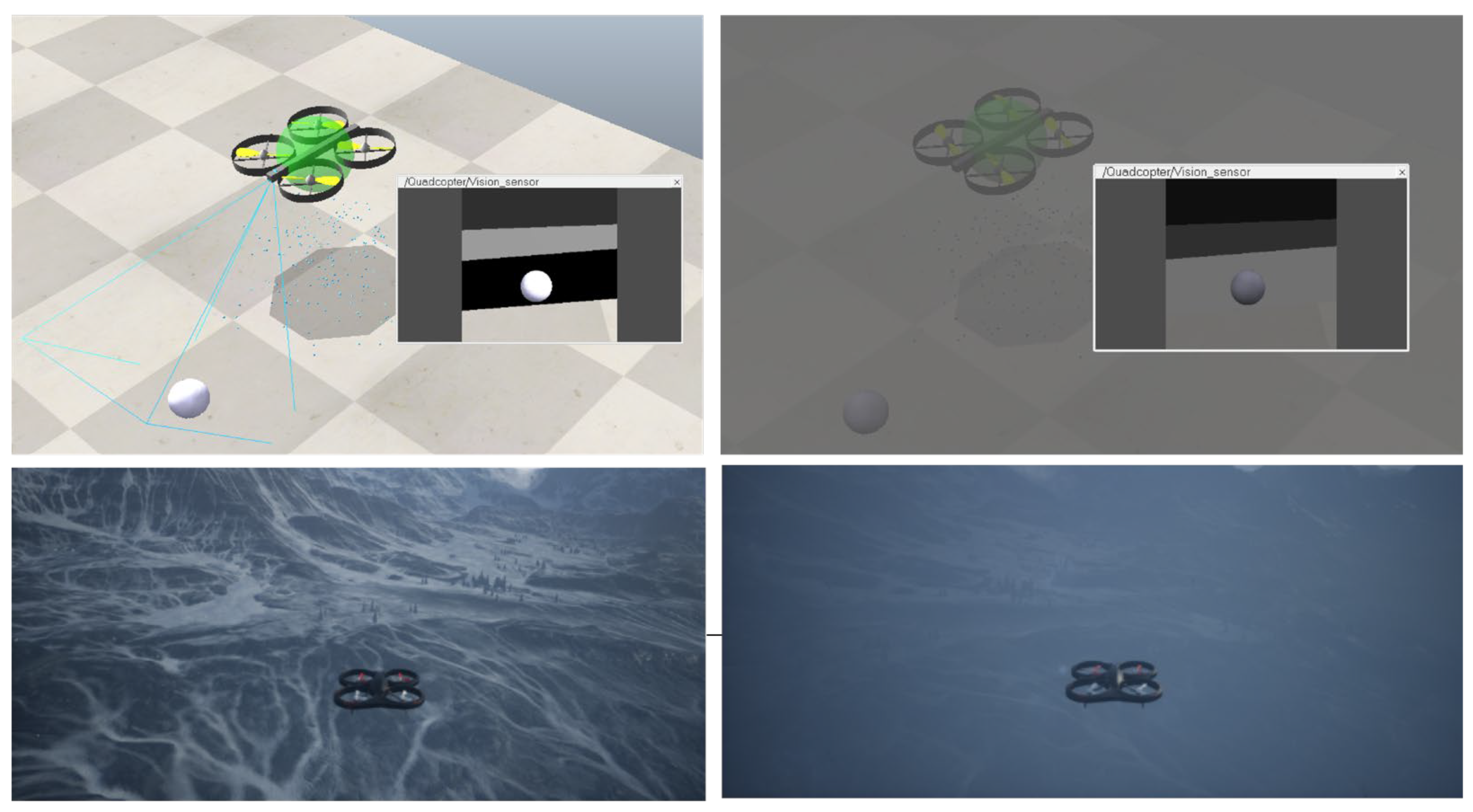
| 3 | Photorealistic Single UAV design and observation. | Examine the addition of various cameras, sensors on UAV, and data collection using simulated environments. | Webots, MATLAB UAV toolbox, & Simulink |
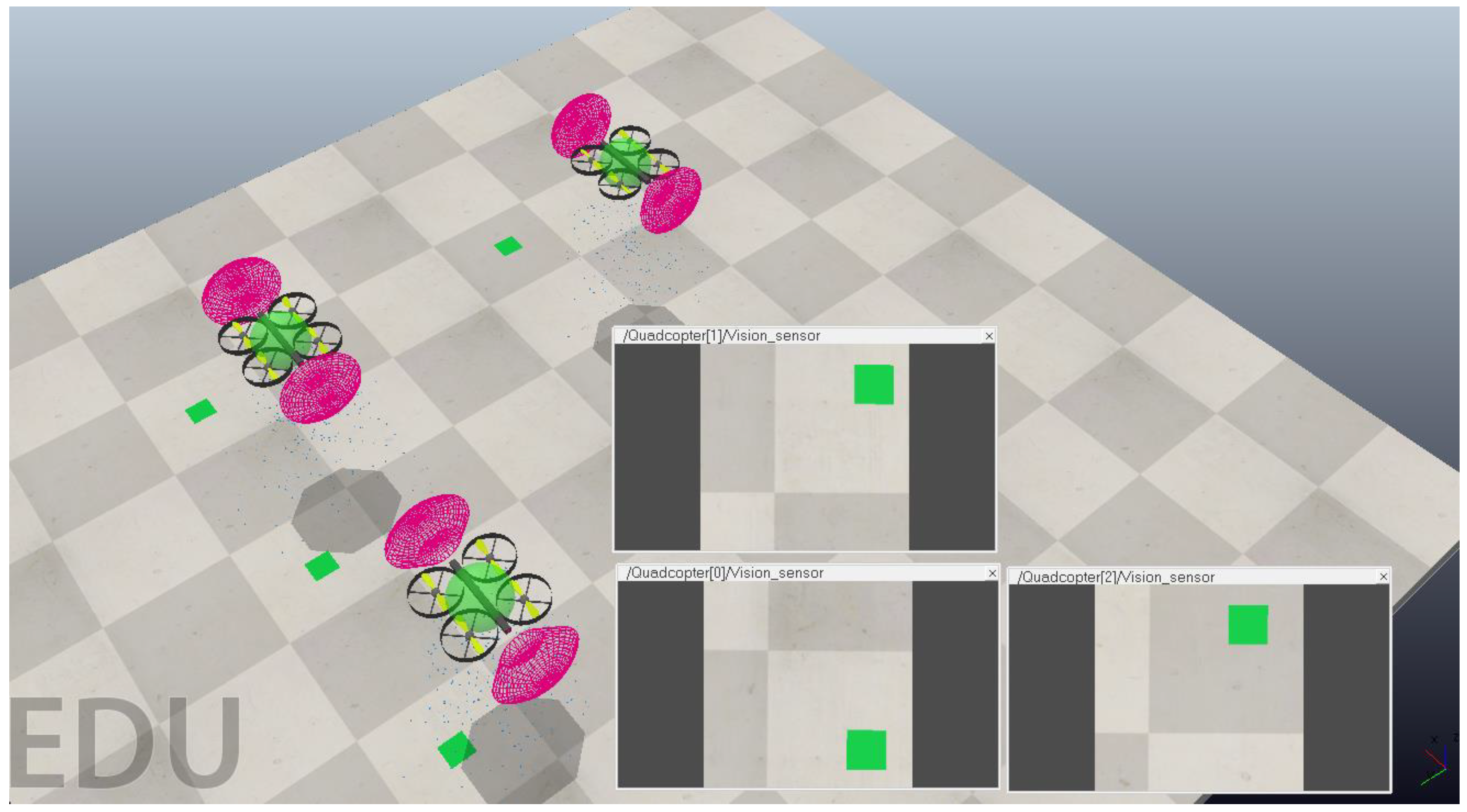
| 4 | Examining basic movement operations of UAV swarm. | Establishing and defining inter-swarm policies, agent deployment, and defining swarm topology | CoppeliaSim |
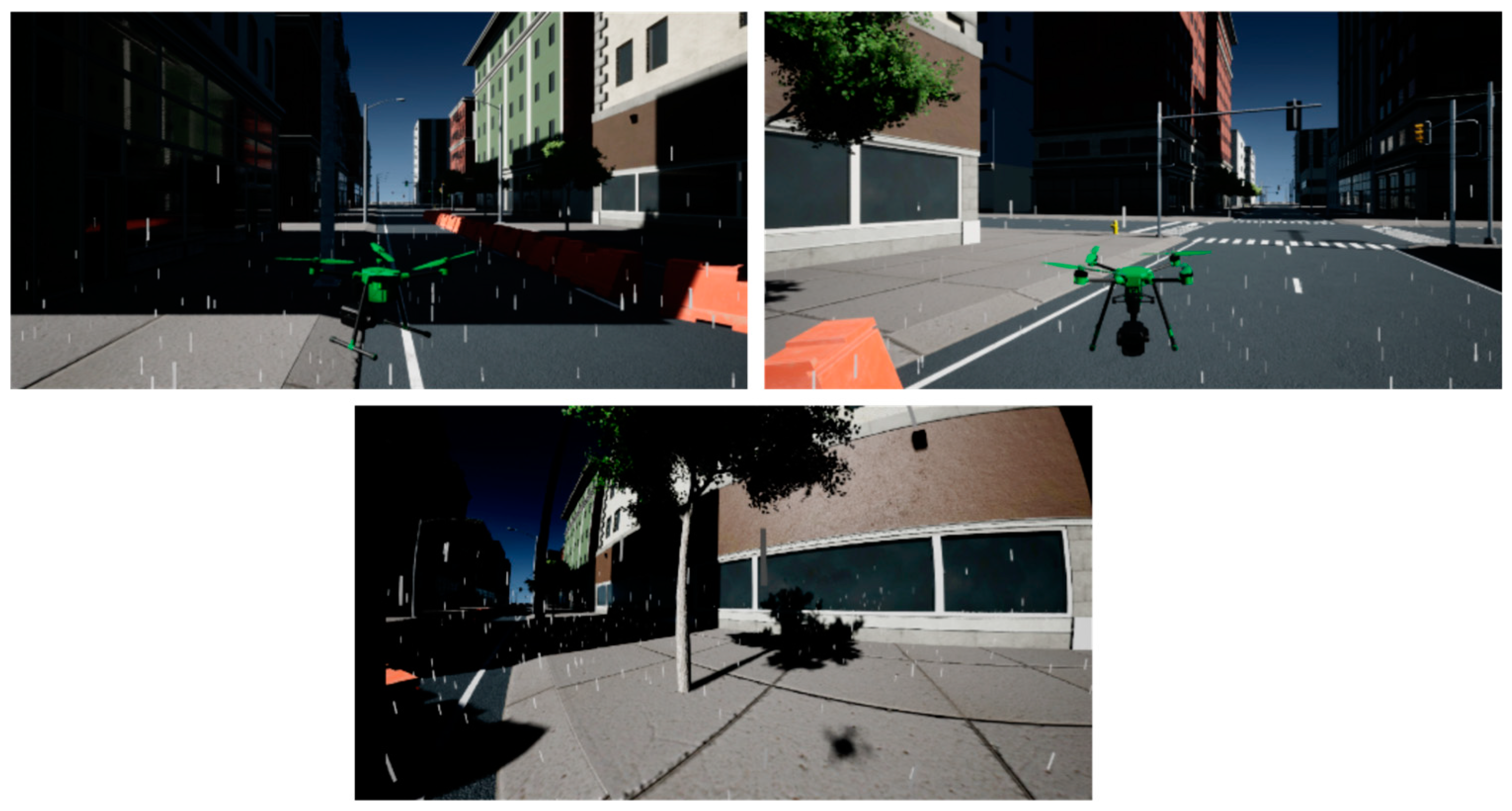
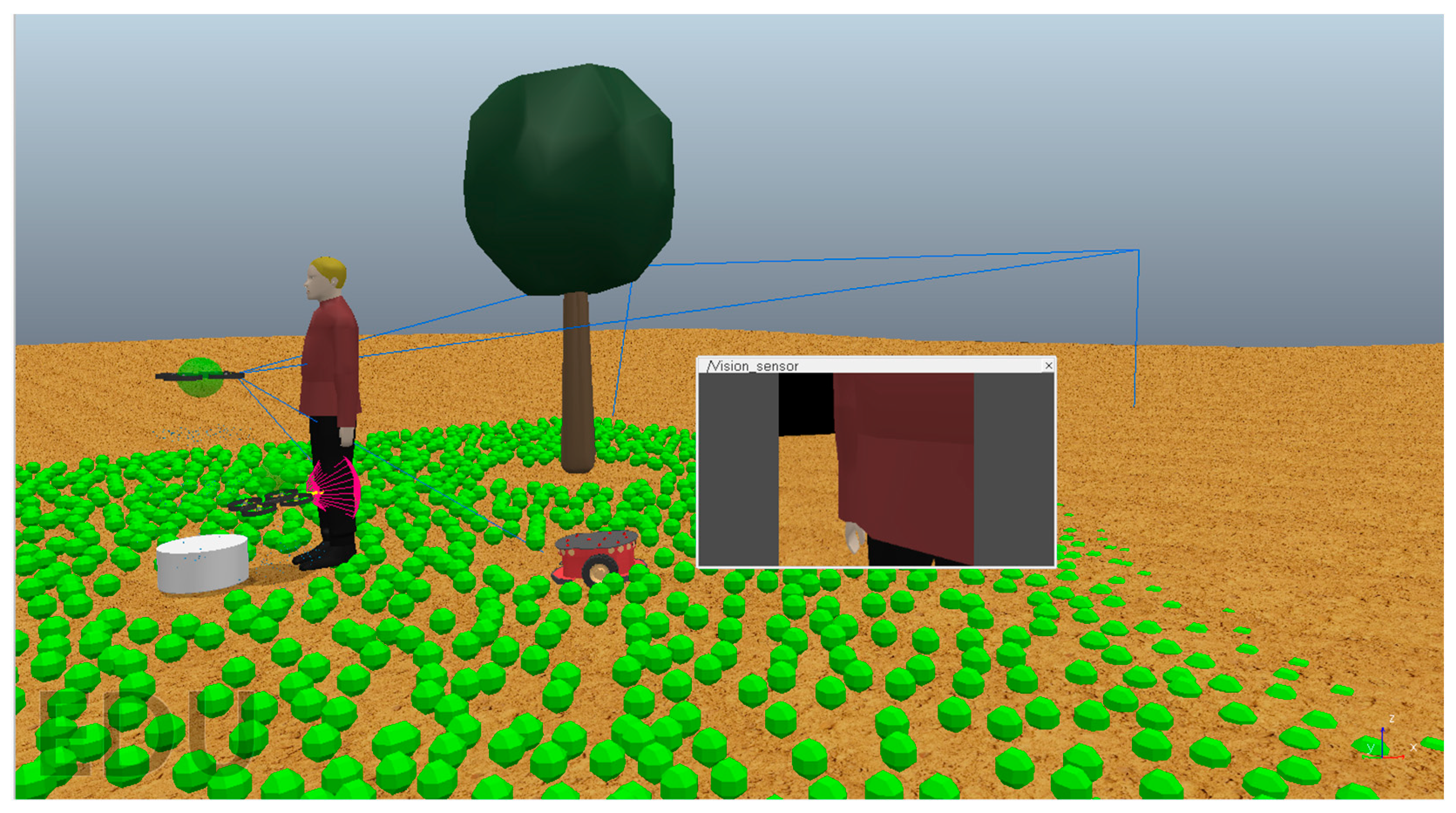
| 5 | Implementing ground terrain features as well as realistic obstacles with varied agents. | Defining buildings, trees, and realistic heterogeneous agents | CoppeliaSim, Webots |
| Simulation Platform | Weather Effect | Additional Notes |
|---|---|---|
| CoppeliaSim | Limited to scripted animations | No built-in support for weather effects |
| Gazebo | Supports weather effects through plugins | Rain, fog, snow, and more can be simulated using community plugins |
| Webots | Simulates environmental conditions | Offers tools to adjust parameters like lightening, wind, and physics |
| UAV toolbox | Sun angle, time of day fog, and rain are possible by default | A slight variability in the mentioned weather factors is possible |
| Microsoft AirSim | A larger number of weather variations are possible. | In-built functions include controlling wind direction, rain, snow, dust, and fog. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phadke, A.; Medrano, F.A.; Sekharan, C.N.; Chu, T. Designing UAV Swarm Experiments: A Simulator Selection and Experiment Design Process. Sensors 2023, 23, 7359. https://doi.org/10.3390/s23177359
Phadke A, Medrano FA, Sekharan CN, Chu T. Designing UAV Swarm Experiments: A Simulator Selection and Experiment Design Process. Sensors. 2023; 23(17):7359. https://doi.org/10.3390/s23177359
Chicago/Turabian StylePhadke, Abhishek, F. Antonio Medrano, Chandra N. Sekharan, and Tianxing Chu. 2023. "Designing UAV Swarm Experiments: A Simulator Selection and Experiment Design Process" Sensors 23, no. 17: 7359. https://doi.org/10.3390/s23177359
APA StylePhadke, A., Medrano, F. A., Sekharan, C. N., & Chu, T. (2023). Designing UAV Swarm Experiments: A Simulator Selection and Experiment Design Process. Sensors, 23(17), 7359. https://doi.org/10.3390/s23177359