1. Introduction
Fan coil units (FCUs) play a crucial role in public buildings such as hotels, contributing to occupants’ comfort and overall energy consumption. They work by circulating air through a heat exchanger coil that is either heated or cooled using a working fluid. Like any mechanical system, FCUs are prone to defects and malfunctions that can reduce their efficiency and increase energy costs. These inefficiencies, if not corrected, can have a negative impact on the environment over time. Although this paper is primarily concerned with fault detection in FCUs, it is important to recognize that they are part of the broader category of heating, ventilation, and air-conditioning (HVAC) systems. Therefore, in the following sections, we look at the challenges and issues associated with HVAC systems as a whole.
The impact of HVAC systems goes beyond energy consumption, as people spend more than 80% of their time indoors, and therefore the health and well-being of occupants can be affected by indoor air quality [
1]. Buildings are responsible for about one-third of the world’s energy consumption and one-quarter of global CO
emissions. In some high-energy-consuming countries, their contribution to energy consumption is even more significant, reaching 42% in Russia, 41% in the EU, 37% in Japan, and 34% in the USA [
2]. About 5% of buildings in the European Union are older than 50 years, while almost 75% of the existing building stock is energy-inefficient [
3]. A similar trend of old inefficient houses is also observed on other continents and in countries such as the USA, where houses are between 20 and 31 years old on average [
4]. The link between aging homes and energy efficiency is evident from various factors such as outdated HVAC systems, inadequate insulation, faulty window seals and door openings, and obsolete appliances [
5].
Tourism is responsible for greenhouse gas emissions, with
accounting for the majority of total emissions (3.2 billion tons of
) at 72%, mainly from transportation, electricity consumption in hotels and restaurants, and the burning of fossil fuels in the production of goods purchased by tourists [
6]. By 2030, the global electricity consumption for cooling buildings is expected to increase by up to 40%. Heat pumps, a key component of HVAC systems, are expected to account for 20% of global heating demand in buildings by 2030. These targets underscore the urgency of adopting sustainable practices in HVAC systems to reduce
emissions and meet climate targets set by the International Energy Agency (IEA). The IEA’s net-zero emissions plan calls for a 40% reduction in greenhouse gas emissions from buildings between 2020 and 2030, requiring a shift away from fossil fuel boilers and improved energy efficiency in existing buildings [
7].
To minimize economic risk and promote long-term sustainable operations, low-carbon design, resource-optimized management, and smart hotel service systems have demonstrated their potential to reduce energy consumption and carbon emissions. Green hotel practices, such as energy-saving measures and waste-reduction programs, have been introduced to mitigate the negative environmental impact of the hotel industry [
8].
This paper is about integrating a deep learning (DL) model into HVAC systems to make buildings, especially hotels, smarter and more energy-efficient. By addressing the environmental challenges of HVAC systems and leveraging the potential of DL, hotels can play an important role in promoting sustainability, reducing energy consumption, and mitigating the environmental impacts associated with the hospitality industry.
1.1. Related Work
Fault detection and diagnosis (FDD) methods in HVAC systems use various techniques to detect anomalies and failures of system components. By analyzing sensor readings and performance data using data analytics, machine learning (ML) algorithms, and signal processing, FDD methods can continuously monitor the system and classify faults. The application of FDD methods in HVAC systems increases user comfort, reduces maintenance costs, and extends equipment life. Thus, the early detection of faults leads to both a higher energy efficiency of the system and indirectly improves the efficiency of the system components, of which FCUs are the focus of this paper. Integrating FDD methods into HVAC systems is therefore an important step towards achieving energy efficiency and sustainability goals, promoting resource conservation, and creating a greener and more environmentally responsible future.
Recent advances in FDD methods encompass a range of approaches, including rule-based methods, statistical analysis, pattern recognition, and DL and ML algorithms, which aim to improve the accuracy and automation of the FDD process. Among these approaches, the data-driven methodology, especially using ML or DL algorithms, has gained considerable recognition in the field of HVAC systems [
9]. Data-driven techniques offer practical advantages as they can be implemented without extensive knowledge of the building or expertise in energetics and thermodynamics. Notable examples of ML techniques include the use of random forest (RF) models, which have been proven to be the primary classifier compared to k-nearest neighbors (KNN), support vector machines (SVMs), and decision trees (DTs) [
10,
11]. RF models are also suitable for feature extraction and can be combined with robust classifiers such as SVMs [
12,
13]. SVMs have demonstrated proficiency as classifiers, especially when dealing with datasets with a small number of features. Notable implementations include binary classifiers and multiclass solutions [
14,
15]. Multilayer perceptrons (MLPs) and decision trees are both widely used models in this area. DTs are known for their high interpretability, which makes them valuable for interpreting models beyond MLPs [
16]. Moreover, MLPs have been used as self-training MLPs in previous studies [
17,
18].
Besides the aforementioned traditional ML models, convolutional neural networks (CNNs) and recurrent neural networks (RNNs) have emerged as extremely popular alternatives in the field of DL. CNNs are mainly used in computer vision tasks and utilize their ability to analyze and recognize visual input. RNNs, on the other hand, are designed to process sequential data effectively and use their ability to process information in a temporal manner, similar to how CNNs process spatial structures in image inputs [
19]. The application of DL techniques in the industry for fault detection began in 2013. Over the years, from 2016 to the present, CNNs have been the most widely used, followed by RNNs, generative adversarial networks (GANs), and autoencoders (AE) as prominent alternatives [
20]. The emergence of DL implementations in HVAC system research can be traced back to 2018, with the seminal paper by Guo et al. [
21] on using a deep belief network (DBN) for fault diagnosis in air-conditioning systems. This study laid the foundation for subsequent research in this field [
22].
Several notable models have been proposed for 1D CNNs in HVAC, including work by Li et al. [
23], Liao et al. [
24], and Cheng et al. [
25]. Similarly, Liu et al. [
26] and Fan et al. [
27] presented new approaches for 2D CNNs. Hence, CNNs have been shown to be versatile in handling HVAC data, either in 1D or 2D form. Although both 1D and 2D representations are well described in the literature, 1D forms are generally preferred due to their simpler preprocessing requirements, unlike 2D CNNs, which usually require data conversion to images [
22].
Moreover, recurrent networks are essential for analyzing time series data, as they excel in capturing sequential dependencies, processing variable-length sequences, retaining historical information, automatically extracting relevant features, and performing tasks such as prediction and anomaly detection. In this context, recurrent models incorporating long short-term memory network (LSTM) architectures have been studied in detail by Liu et al. [
28], Tian et al. [
29], Taheri et al. [
30], and Behravan et al. [
31]. In addition, gated recurrent unit (GRU) models, a special type of RNN, have been proposed and used by Wang et al. [
32] and Li et al. [
33] in their respective studies.
1.2. Contributions and Structure
In the HVAC-related literature, researchers have focused on examining specific subcategories such as air handling units, air conditioners, heat pumps, and chillers. FCUs, however, have received relatively little attention and account for only about 6% of the research effort [
9]. Therefore, we aim to fill the detected research gap and evaluate established DL architectures using real-world FCU data.
Researchers have presented good models and results in the selected related work [
24,
31,
32,
34]. They have generally done multiple classifications of different faults ranging from 4 to 10 different types of faults. The datasets in the respective studies are typically based on measurements with a low-frequency interval between consecutive samples, ranging from 1 s to 5 min. However, it is worth noting that the total volume of data in those datasets is considerably smaller than the dataset we utilized. The largest dataset commonly used is that of the American Society of Heating, Refrigerating, and Air-Conditioning Engineers (ASHRAE), which can include measurements of up to 1 year [
32]. It is common for researchers to use data derived from the ASHRAE, or simulated data, as it is difficult to obtain labeled real-world data [
9]. While we also used simulations to augment data, our approach differs significantly as we used an extensive real-world dataset spanning three years. We aimed to use this extensive dataset to improve the effectiveness of fault detection technologies based on DL methods, especially in the context of FCUs in HVAC systems.
Some authors have used a similar approach to collect real-world data and simulate faults [
24,
31,
34]. However, as mentioned earlier, the volume of their datasets is much smaller and ranges from one day to only a few months. Our research used a unique dataset that includes three years of data from 60 hotel rooms where the corresponding sensor readings were collected at 5 min intervals. This dataset includes no less than 22 different features, which was also compared a lot to other studies. It contains real-world data, both sensor readings from the hotel and environmental information, as well as simulated faults generated by the corresponding TRNSYS model.
The contributions of this research are the following:
The development of fault detection models for FCUs, an under-researched subtype of HVAC systems, to fill an existing gap in the literature and further advance the field of HVAC systems.
The implementation of advanced DL-based architectures as the basis for fault detectors with the goal of optimizing the efficiency of FCUs in HVAC systems.
The curation of an original dataset specific to FCUs focused on real data from a hotel building. This dataset served as the basis for developing four specialized models to identify three common faults in HVAC systems.
The validation of the model architectures through rigorous testing on a large dataset and an analysis and comparison with a traditional RF-based model.
In the following, we present the underlying smart-room concept, which serves as the primary source of our data (
Section 2.1). We provide detailed insights into the data-labeling procedure (
Section 2.2), preprocessing techniques used (
Section 2.3), and model development (
Section 2.4). Results are presented and discussed in
Section 3, after which we draw conclusions in
Section 4.
2. Materials and Methods
In this section, we present the collected data used in our modeling pipeline. We also provide detailed information on the data preprocessing and model development, all of which were carried out using Python 3.9.13. Namely, while Pandas 1.5.1, Numpy 1.21.5, Matplotlib 3.5.2, and Scikit-learn 1.2.1 libraries were utilized for the data preprocessing and RF model development, the Pytorch 2.0.0 library was specifically used for DL model development.
2.1. Smart Room System and Data Acquisition
In this research, we utilized the same dataset as in our previous study [
35]. The data were collected from a hotel building in Zagreb, the capital city of Croatia. The hotel employs a smart-room concept, which incorporates microprocessor-controlled stations for the efficient monitoring and regulation of crucial parameters to ensure the optimal functionality of the hotel rooms. These stations are connected to a central computer system, which enhances efficiency and provides comprehensive control. Consequently, this integrated system facilitates improved energy management, leading to potential cost savings, elevated customer service standards, enhanced system security, and increased operational efficiency through real-time access to current information. Implementing the smart-room concept empowers hotels to streamline their management activities, effectively oversee and monitor the entire system, and consequently achieve enhanced overall performance.
The acquired data spanned from 2015 to 2021, with a data sampling frequency of 5 min. However, we decided to focus on specific years, 2017 to 2019, for several reasons related to data quality and representativeness. We found that years 2017 to 2019 had the highest data quality in terms of reliability and accuracy. Unlike the other years in the dataset, which had numerous instances of missing data and recording errors, this time frame provided more consistent and trustworthy data. We also chose to exclude data from years 2020 and 2021 due to the significant impact of the pandemic on hotel operations. Due to the restrictions and limited travel during this time, fewer guests stayed at the hotel, which may have skewed the data and made it less representative of typical guest behavior and room temperatures. Therefore, to ensure the reliability, consistency, and relevance of our analysis and modeling, we selectively focused on data from 2017 to 2019 and specifically included three floors per year (upper and lower room temperatures from a single floor). It should be noted that this reduced dataset still contained many more data than the resources used in other studies.
Table 1 presents the data features. The environmental characteristics, such as outdoor temperature, humidity, and irradiation, were supplemented by the Croatian Meteorological and Hydrological Service. Moreover, we incorporated additional features such as room orientation and the status of the manually operated HVAC system through feature engineering.
2.2. Data Labeling
In order to label the data, we utilized a corresponding physical model. TRNSYS software was used to create a system model based on the architectural descriptions of the building. The model focused on simulating the thermal behavior of a specific part of the building, consisting of six thermal zones representing the guest rooms. By monitoring the central thermal zone in detail and creating boundary conditions in the other zones, the model ensured the consistency of physical properties in all rooms. To replicate the performance of the FCUs, performance maps were created with each operating point representing the output capacity under explicitly defined conditions. The operating points were obtained directly from the FCU manufacturer, and separate performance maps were created for heating and cooling modes. Specific input parameters were incorporated into the FCU model, such as the temperature and flow rate of water through the heat exchangers, the current characteristics of the room air, and the control system signals. The model then processed these inputs to obtain output variables that included the exact temperature, airflow, and relative humidity of the air entering the room. For detailed information on the development of the physical model, refer to our previous work [
36], which offers comprehensive insights into the subject.
To ensure the accuracy of the simulations, the physical model was calibrated and validated against real data from the hotel building. The simulation environment used in the study was based on input features extracted from the hotel data mentioned in
Table 1. These features were developed to control the FCU system and effectively regulate internal and external conditions. The thermostat control used the set temperature as input data to regulate the FCU. The
determined the heating or cooling demand in simulations, while the
, initiated by the guest, interrupted the system’s operation. The
feature was used to set specific FCU speeds at specific times. Other parameters were used to simulate conditions in a hotel.
data were simulated as an internal heat source, and window-opening data were used to emulate the exchange of outdoor air with indoor air. To simulate the temperature conditions in the hotel, the temperatures in adjacent rooms were set as reference values from the collected data. Outdoor air temperature and solar irradiation were used to mimic external conditions. To ensure accuracy, the solar irradiation data were additionally processed to obtain accurate values for each room orientation, increasing the realism of the simulation. Finally, an additional input to the model was the introduction of faults to trigger anomalies at specific times.
Using this physical model, the data were generated and labeled with faulty periods of the system. The simulations were initially performed under normal conditions, resulting in a healthy dataset. Subsequent simulations introduced problems of varying lengths that affected the operation of the system. These problems were inserted at random times and alternated between normal and faulty periods.
The dataset obtained after introducing faults comprised three distinct categories. Firstly, fault 1 () was characterized by a fan coil valve that was stuck at a 50% position. In order to accurately simulate this fault, the water flow through the heat exchanger was proportionally reduced according to the position of the stuck valve. Secondly, fault 2 () represented a situation where the room had a reduced airflow with the fan delivering less air. To simulate , the air supply to the room was directly reduced by a corresponding amount. Finally, fault 3 (), which signified a complete system failure, was simulated by programming the FCU to stop delivering conditioned air to the room. Furthermore, when generating faults, the defined lengths of the normal and faulty periods were selected based on specific ranges. For fault , the length of the normal and faulty periods was randomly chosen between 20 and 40 days. Fault had normal and faulty periods of 10 to 30 days and 10 to 40 days, respectively. Fault , which occurs less frequently, had a normal period of 5 to 15 days and a faulty period of 1 to 10 days. The inserted faults significantly impacted the room’s air temperature () and the fan speeds ( to ).
The duration of the periods left enough time for faults to occur, as faults are not always detected immediately. To identify faulty periods, a comparison was made between the healthy and faulty datasets using the air temperature (). Fault periods were marked using large deviations in air temperature, as certain conditions had to be met for faults to be detected. For example, faults could only be detected when the FCU system was operating at an adequate capacity. Therefore, periods with significant air temperature deviations were marked as true fault periods, i.e., periods in which faults occurred during the simulation. However, it is important to emphasize that fault is the most subtle since it does not affect the deviations in the temperatures as much as others do.
In the subsequent sections of this paper, we utilize specific terms to refer to the datasets and models associated with each fault. For instance, we refer to the dataset and models involving the first fault as “ dataset”/“ models”. Similarly, datasets and models concerning faults and are denoted as “ dataset”/“ models” and “ dataset”/“ models”, respectively.
2.3. Data Preprocessing
In order to optimize the efficiency of fan coil units, it is crucial to address fault detection by integrating DL models into the corresponding systems. However, for a successful integration, it is imperative that the sensors and sensor data exhibit a good quality. Consequently, preprocessing plays a pivotal role in obtaining reliable modeling results, making it the most crucial aspect of the model development pipeline.
First, the data were cleaned of possible errors or outliers, e.g., temperatures equal to zero and “NaN” (not a number) values. Furthermore, the main drawback of working with noisy HVAC system data is the imbalance of classes and the labeling of the data, especially when it comes to predicting binary classes. To overcome these challenges, we used undersampling as a preprocessing step for each dataset, which effectively mitigates the effects of class imbalance and improves overall data quality. The final output consisted of
anomalous data and
normal data. Although undersampling, as seen here, is a quick and easy way to resolve class imbalance [
34], it can lead to information loss if not used properly. However, in our particular scenario where we were dealing with highly imbalanced big data and temperature transitions occurred slowly, this preprocessing step proved extremely beneficial. It not only reduced the computational cost associated with running the model but also produced better performing models.
After the data preparation, we performed preprocessing utilizing two different approaches, depending on whether DL models or RF models were targeted. In the first approach, we prioritized data consistency and result integrity by initially standardizing the data for DL models. Then, we used sliding-window preprocessing that had a defined window size of 144 rows (equivalent to 12 h) with an equal step size. We also established a threshold for error detection, whereby a window was flagged as faulty if it contained at least one observed fault within it. By implementing this configuration, we enhanced the sensitivity of our models in detecting faults while simultaneously preserving the temporal relationships between data points.
The preprocessing phase for DL models proceeded smoothly, without encountering any issues during model training. The models were executed on GPUs with the assistance of data loaders/batches. However, when the same procedure was applied to the RF model, challenges arose due to limitations inherent in RFs and the scikit-learn library. These limitations resulted in RAM problems when processing large datasets.
Hence, to optimize the RF models, we employed a second approach, by introducing an additional step. Namely, each data window was compressed into a single row, containing summarized features. For continuous features, the summarized features included the minimum, maximum, mean, summation, and standard deviation. For binary features, the maximum function was employed together with a defined grouping function which identified ordered units of ones and output the total count of such groups within a window. By employing this compression technique, the original window, initially consisting of 144 rows and 21 features, was transformed into a compressed representation—a single vector with 80 features. This compression technique aimed to enhance the model’s efficiency by reducing memory consumption during execution.
In summary, a total of 10,066 samples from the dataset, 24,540 samples from the dataset, and 25,446 samples from the dataset were used in the preprocessing phase. The input data for the DL models were organized into tensors consisting of 1000 batches, containing windows of 144 data points and 21 channels or features. In contrast, the RF models used an approach that resulted in input windows with 144 data points and a total of 80 features. These preprocessing steps and input dimensions provided a solid basis for a valid comparison between the DL and RF models. The final output dimension was binary: 0 for no detected fault or 1 for a detected fault.
2.4. Model Development
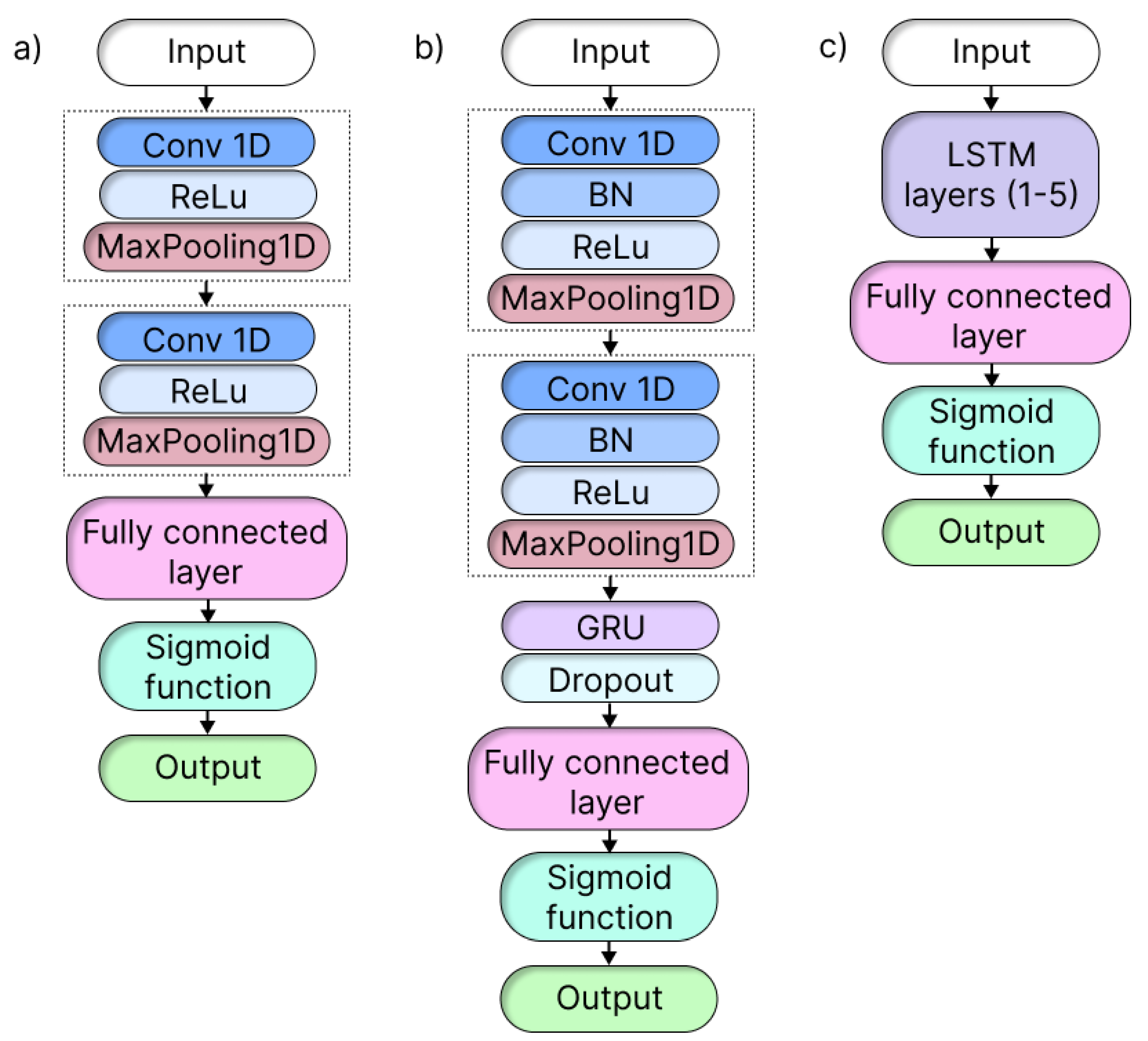
In our effort to develop a comprehensive model, we drew on related work to select the models under consideration.
Figure 1 shows the three established architectures that motivated us the most and that made up our model repertoire: 1D CNNs [
24,
34], CNNs combined with GRU [
32], and LSTM [
31]. To enable a meaningful comparison between DL models and the traditional approaches, we also included the RF model as a baseline benchmark.
The selected model architectures were chosen for their proven efficiency in FDD tasks. For computational efficiency, accuracy, and feature extraction capability, we chose 1D CNNs. Our 1D CNN architecture included two convolutional layers, two ReLU activation functions, two max-pooling layers, and one fully linked layer [
24].
Next, to capture the temporal dependencies in time series datasets, we used LSTM and GRU models. Our LSTM architecture consisted of a single LSTM layer followed by a fully connected layer [
31]. We also used a hybrid CNN+GRU architecture that was inspired by previous research [
32] and combined the strengths of both components. The CNN component included two convolutional layers, two pooling layers, a batch normalization, and a ReLU activation, while the GRU component was integrated after the last pooling layer and included a dropout and a fully connected layer.
Hyperparameter optimization played a crucial role in maximizing model performance. We used Bayesian optimization with 50 iterations to tune the models using the training and validation datasets. Adam optimization was used for all models. For the DL models, we used the binary cross-entropy loss function and the sigmoid activation function. A detailed description of hyperparameters for the DL models can be found in
Table 2. The tuning process for the CNN models focused on optimizing parameters such as kernel size, stride, number of filters, learning rate, and weight decay. Similarly, the CNN+GRU model was optimized with additional parameters such as hidden size and dropout rate. Lastly, the LSTM model involved tuning parameters such as the number of LSTM layers, hidden size, learning rate, and weight decay. Other parameters mentioned in
Table 2 such as window size, step size, batch size, activation function, optimizer, cost function, epoch, patience for early stopping, and tuning iterations were all defined with fixed values for each model.
To ensure the integrity of model training, we shuffled the input dataset exclusively for training, thus introducing an additional layer of randomness. However, it is important to note that shuffling was not applied to the validation and testing datasets to maintain impartiality during subsequent evaluations.
In addition to the DL models, we also used the RF model as a baseline, as it has been shown to outperform other approaches in previous research [
37]. Namely, RF-based solutions could offer notable advantages that position them as comparable contenders to DL models. These advantages include interpretability, feature importance determination, effective capture of nonlinear relationships, robustness to outliers, insensitivity to feature scaling, and efficiency and scalability when processing datasets.
The RF model was configured using parameters such as the number of trees, maximum depth, maximum features, minimum samples for split, minimum samples for leaf, maximum features, and criterion. The specific ranges of values for these parameters are also defined in
Table 2.
3. Results and Discussion
The preprocessing results revealed a significant size reduction in the dataset, primarily due to its initial class imbalance of only 3–4% labeled faults compared to the other datasets. Consequently, the dataset was reduced to approximately 4 to 5 thousand rows. In contrast, the preprocessing techniques produced more favorable outcomes for the dataset (labeled 12–13%) and the dataset (labeled 21–23%), resulting in sizes ranging around 12 thousand rows and 13 thousand rows, respectively.
For the hyperparameter tuning process, the outcomes of the DL and RF models tuning are summarized in
Table 3.
Upon examining the summarized results, several key observations can be made. Starting with the confusion matrices presented in
Table 4, we can observe the performance of the models in terms of true negatives, false positives, false negatives, and true positives for each fault category. For
models, both the CNN and CNN+GRU models achieved similar results, with around
true negatives,
false positives,
false negatives, and
true positives. In contrast, the LSTM and RF models exhibited weaker results.
Moving on to the models, the CNN+GRU model exhibited the highest accuracy among all models, with around true positives. The CNN, LSTM, and RF models achieved relatively similar results, with varying distributions of the confusion matrix indicators.
For the models, both the CNN+GRU and CNN models showcased strong performance, with approximately true negatives and true positives. The LSTM and RF models demonstrated slightly lower performance, with different trade-offs between true negatives, false positives, false negatives, and true positives.
Next,
Table 5 presents summarized metrics for each fault model, including accuracy, precision, recall,
score, and area under the curve (AUC). For
models, the CNN+GRU model attained the highest accuracy of
and an
score of
, indicating a favorable balance between precision and recall. The RF model yielded satisfactory results with an accuracy of
and an
score of
, outperforming the LSTM model which exhibited comparatively lower performance. This outcome can be attributed to data scarcity, as the models from DL usually cope better with larger datasets and therefore provide more accurate results in such a context.
In the case of the models, the CNN+GRU model showcased the highest accuracy of and an score of , indicating strong overall performance. The RF model performed the weakest among all models, while the LSTM and CNN models demonstrated similar results with accuracy ranging from to .
Regarding the models, both the CNN+GRU and CNN models achieved high accuracy scores of and , respectively, showcasing robust performance. The LSTM model displayed a slightly lower accuracy of , while the RF model exhibited the weakest performance with an accuracy of .
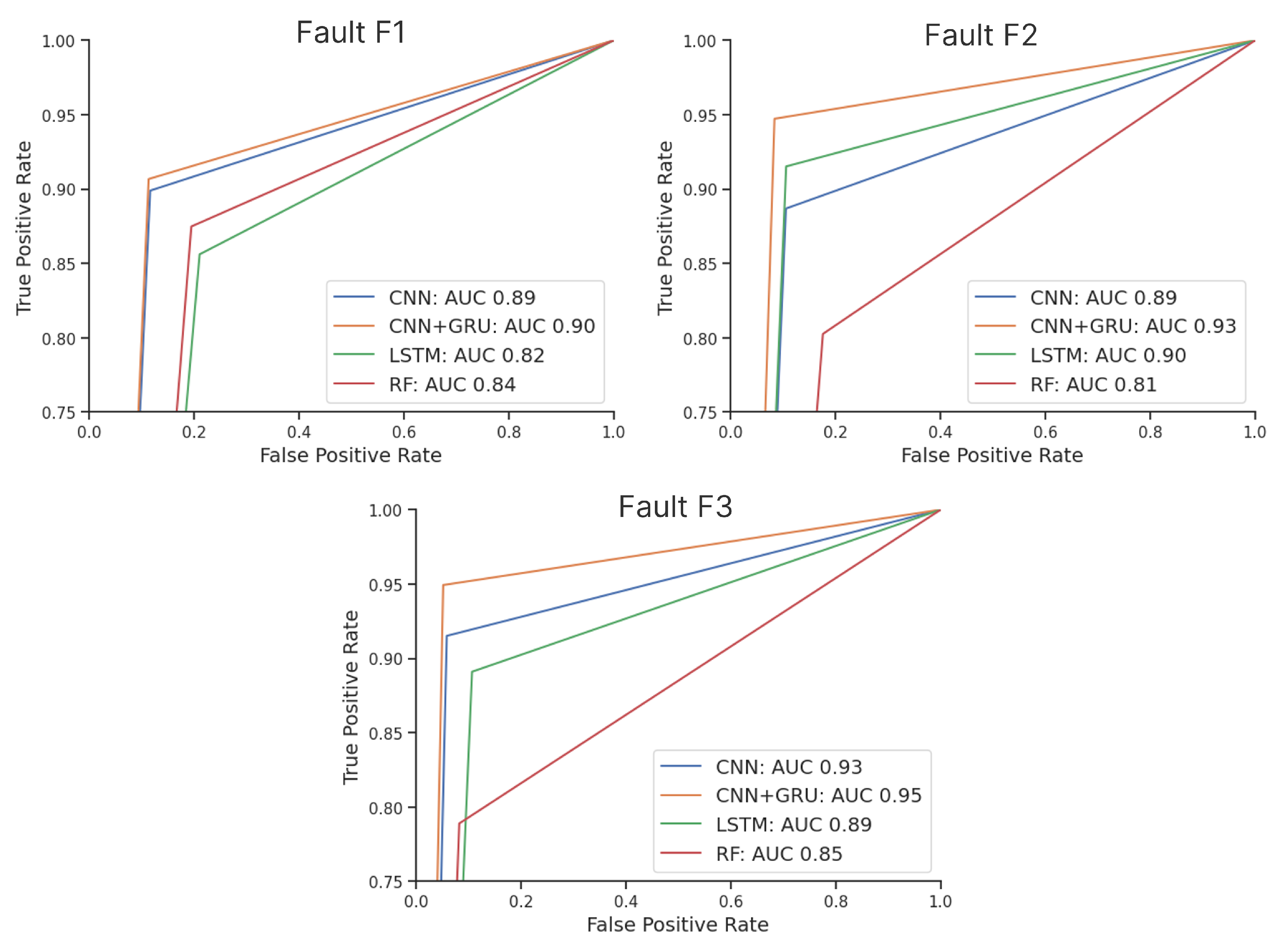
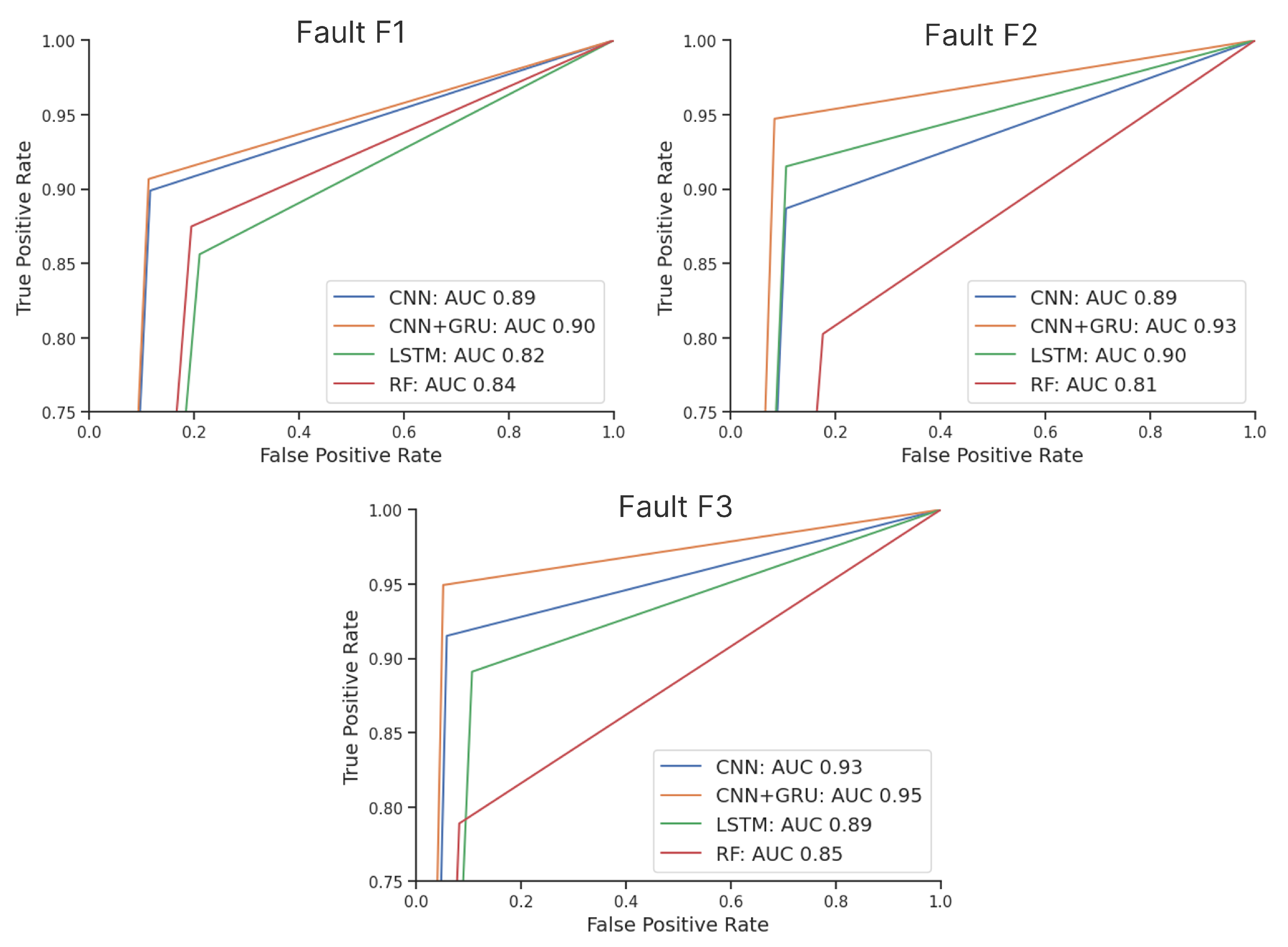
Furthermore,
Figure 2 presents a visual comparison of the receiver operating characteristic (ROC) curves, which effectively highlight the distinctions in model performance and allow for some new interpretations. For example, the utilization of undersampling as a preprocessing step resulted in the
dataset being the smallest, followed by the
and
datasets (with the
dataset being the largest). While maintaining a balanced distribution of
faults and
nonfaulty data, the dataset sizes played a significant role in determining the final results.
Figure 2 clearly demonstrates that the curves for the
models are closer together compared to those of the
and
models, indicating that the smaller dataset led to lower performance across all models.
Upon analyzing the and models, it becomes evident that as the dataset size increases, the model curves diverge. Notably, the RF model’s performance deteriorates, suggesting that larger dataset sizes provide more benefit to DL models while adversely affecting traditional models. However, despite DL models exhibiting poorer performance with less data, the CNN+GRU consistently outperformed each individual model, regardless of the dataset size. This finding highlights the robustness of the hybrid model in accommodating varying dataset sizes.
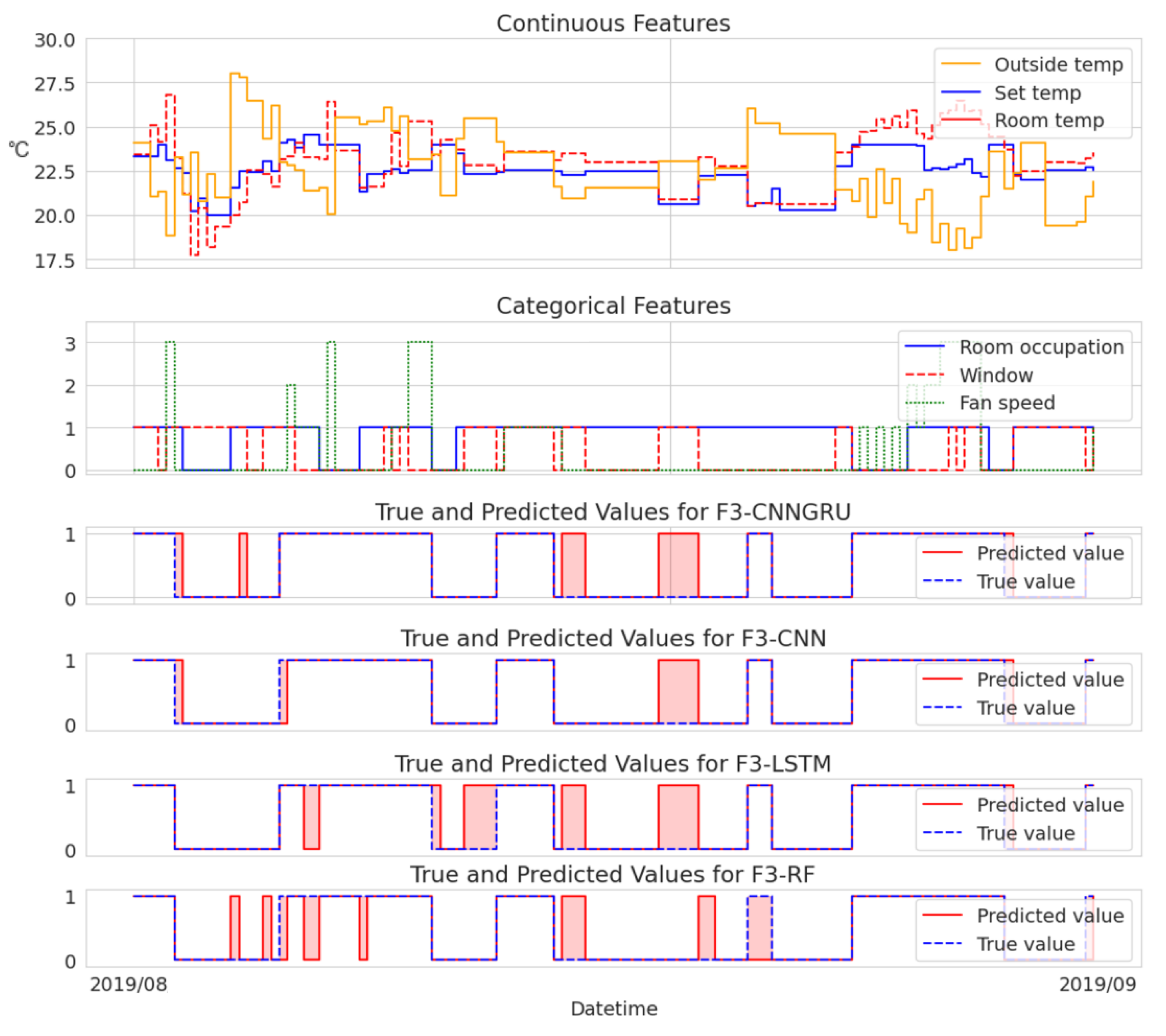
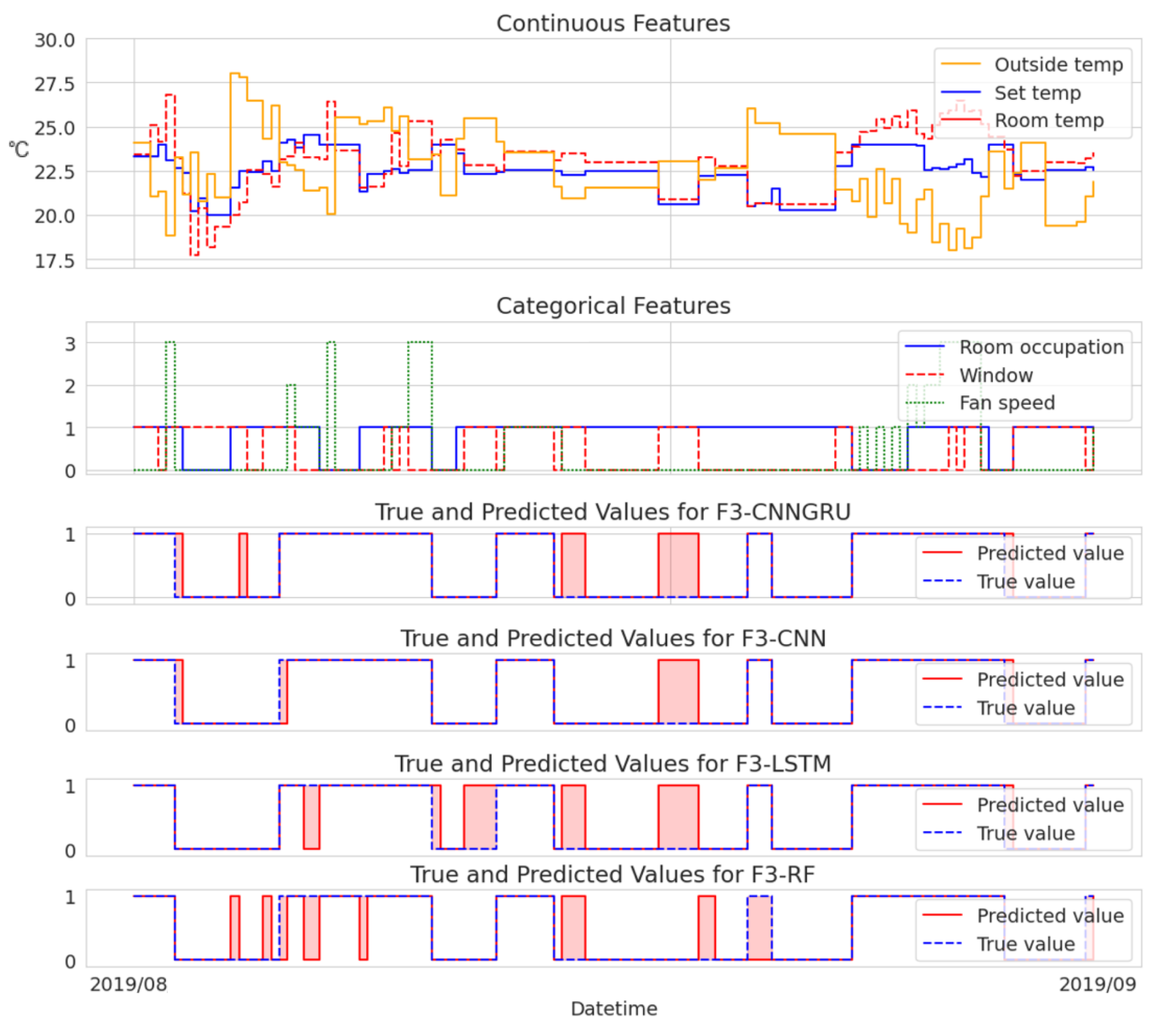
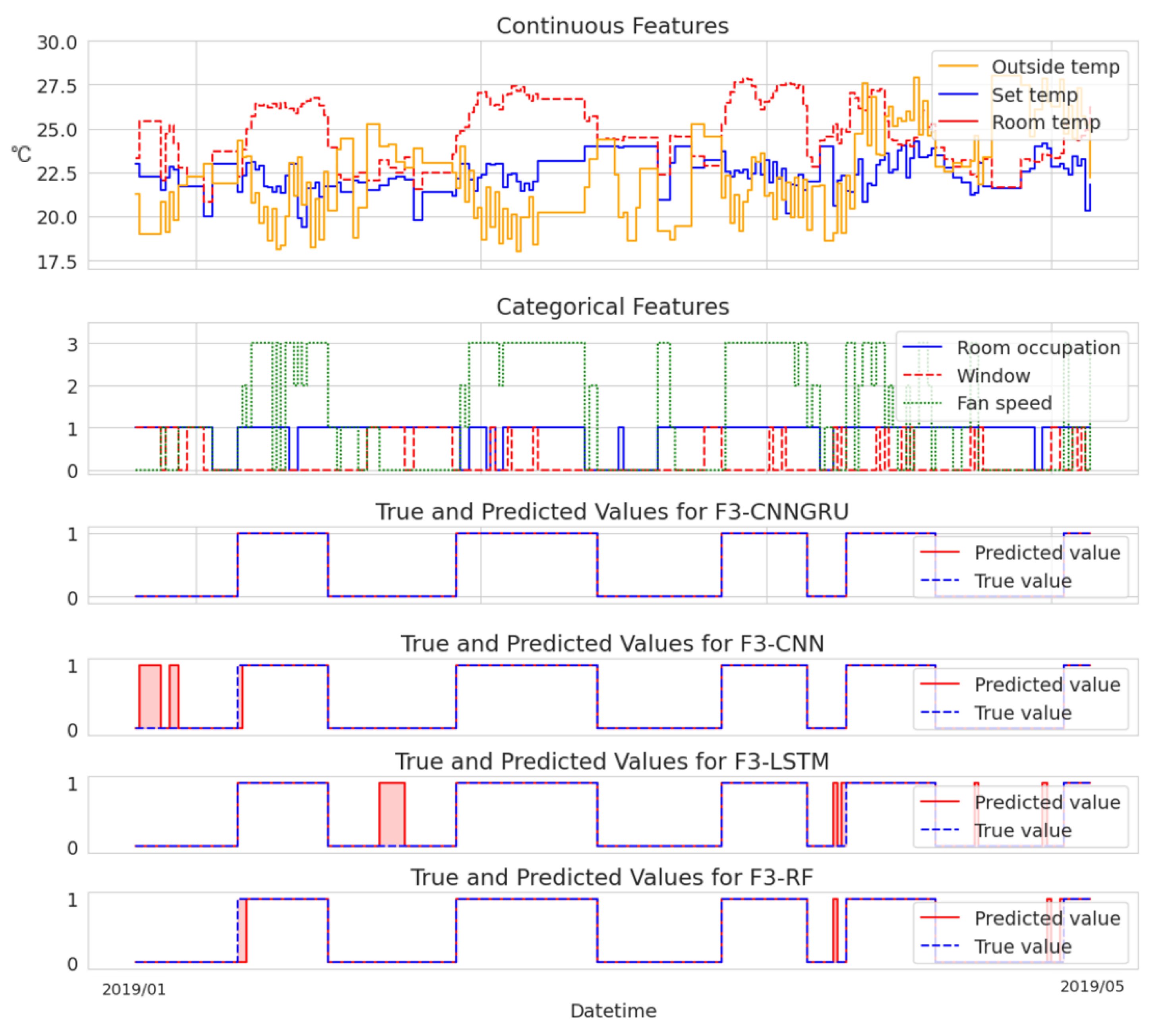
To provide an analysis of the variations in model performance, we additionally present two cases visualized in
Figure 3 and
Figure 4. These cases allow for a direct comparison of each model’s fault detection capabilities.
Figure 3 provides visual representations of instances where the models exhibited incorrect detections, offering valuable insights into their limitations and areas for improvement. This analysis sheds light on the weaknesses of each model, particularly in relation to the sensitivity of the threshold for anomaly labeling.
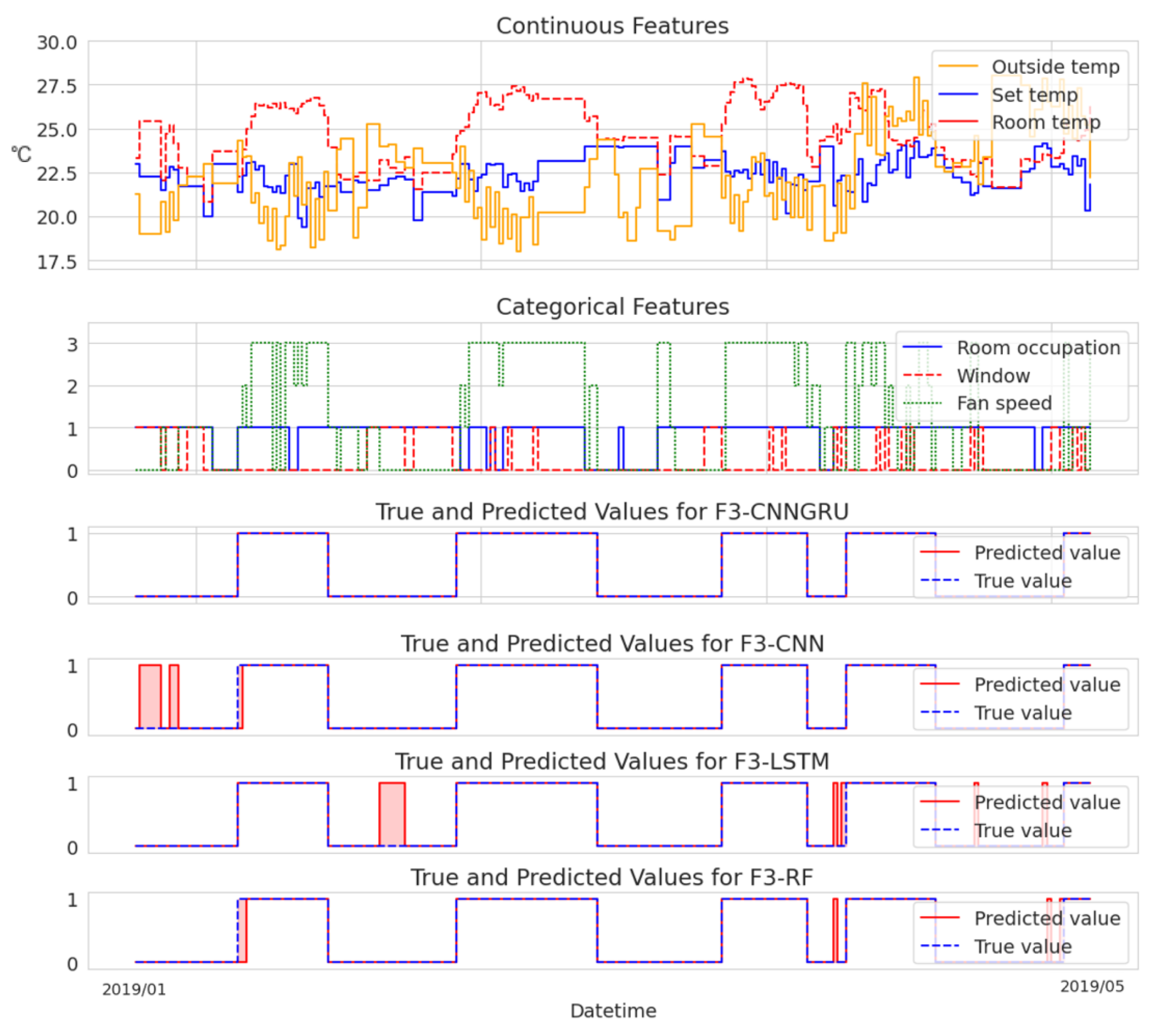
In contrast,
Figure 4 highlights examples where the CNN+GRU model excelled in terms of accurate detections compared to the other models. These instances serve as compelling evidence of the superior performance and effectiveness of the CNN+GRU model. While the other models also demonstrate satisfactory detection of obvious temperature deviations depicted in the graph, they tend to yield more false positives by detecting faults that do not exist within the selected data period. This tendency can be attributed, in part, to the sensitivity of the fault-labeling mechanism.
Overall, the presented cases play an important role in conveying the strengths and weaknesses of the models, allowing for a comprehensive understanding of their performance in fault detection.
It is crucial to emphasize that any gaps in the data resulting from the data preprocessing stage were disregarded for the purpose of visualization. The selected continuous features included outside temperature, set temperature, and room temperature, while the categorical features encompassed room occupation, window status, and fan speed.
4. Conclusions
In this paper, an originally curated dataset was labeled by simulating three different faults within a physical model implemented in TRNSYS. To prepare the data for analysis, different preprocessing techniques were applied, such as undersampling with sliding windows for DL models and with an additional compression of the sliding windows for RF models. Among the four models tested (CNN, CNN+GRU, LSTM, RF), the hybrid CNN+GRU model performed better than the others for each fault. This finding suggests the possible superiority of combining different model architectures.
This research makes a contribution to the field of fault detection in HVAC systems by using a larger and more diverse dataset. The dataset included a combination of real-world data (originated from a hotel’s sensory measurement system, additionally augmented with environmental conditions data) and simulated faults.
One of the key findings of this study is the remarkable performance of the hybrid CNN+GRU model. Regardless of the size of the dataset, this model showed robustness and outperformed the other models. In addition, the models from the DL family generally performed better than the traditional baseline model, highlighting the effectiveness of deep learning in fault detection.
The superior performance of the CNN-based models can be attributed to their ability to effectively capture spatial and temporal patterns in the input data, which enables the extraction of meaningful features for fault detection in FCU systems. The inclusion of a GRU further improves the performance of the model by capturing long-term dependencies and temporal dynamics.
In contrast, despite its widespread use in sequence modeling, the LSTM model did not perform as well as the CNN-based models. This suggests that the FCU fault detection problem is primarily based on the detection of local patterns and faults, which suits the strengths of the CNN models. Moreover, the optimization process for the LSTM model proved to be more difficult due to its longer convergence time compared to other models. The successful implementation of LSTM requires a more complex network structure.
The traditional baseline RF model showed relatively lower performance compared to the DL models, suggesting that the DL models’ ability to automatically learn hierarchical representations better captured the complex patterns and relationships in the FCU data.
In conclusion, the application of DL models, especially hybrid architectures such as CNN+GRU, holds great promise for improving fault detection and diagnosis in HVAC/FCU systems. By accurately identifying and diagnosing faults, DL models have the potential to optimize system performance, reduce maintenance costs, and extend the life of HVAC systems. However, to assess the generalizability and robustness of the proposed models, further validation using real data from FCU systems in actual hotel buildings is required. Such validation would provide insights into real-world scenarios and support decision-making in the development of fault detection systems.







{kind=link}
{kind=link}
{kind=link}
{kind=link}