
Cooperative Multiband Spectrum Sensing Using Radio Environment Maps and Neural Networks
 , , and
, , and
Abstract
:1. Introduction
2. Theoretical Basis of REMs and NNs
2.1. Construction of Radio Environment Maps
2.1.1. IDW Method
2.1.2. Kriging Method
2.2. Neural Networks
3. Preliminary Work
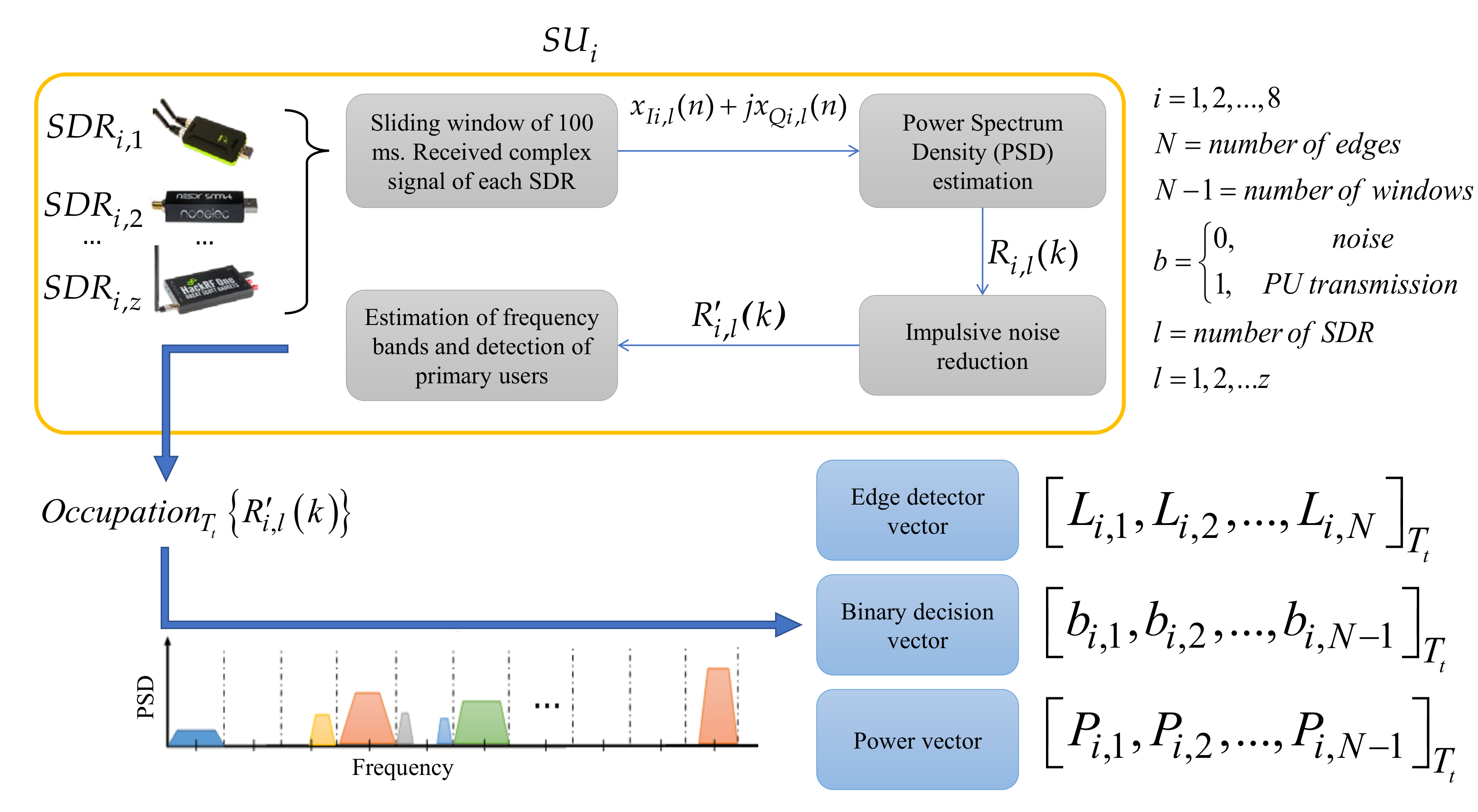
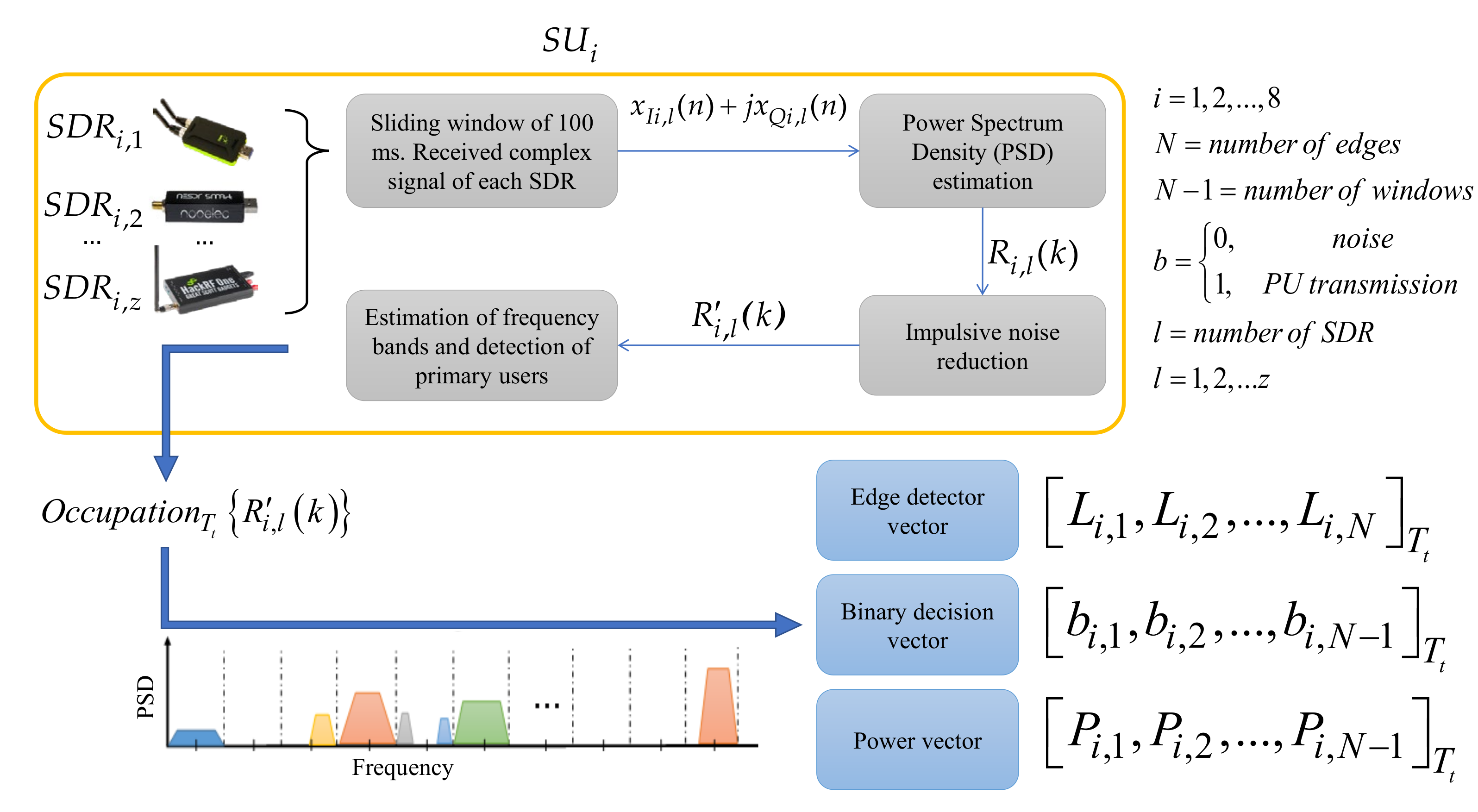
- Sliding window of 100 ms. In this block, the complex signal from each SDR in the time domain was received and updated every 100 ms from the radio environment of the i-th SU integrated by z different SDR devices;
- Power Spectrum Density (PSD) estimation. In this module, the Welch method [45] was applied to each signal in order to obtain, on a linear scale, the wideband PSD from the SU ensemble;
- Impulsive noise reduction. In this block, impulsive noise, high-frequency noise, and abrupt changes (many of them generated by the SDR devices themselves) in the signal were eliminated or diminished through discrete wavelets via the multiresolution analysis [46], resulting in the signal ;
- Estimation of frequency bands and detection of primary users. In this module, the MBSS technique based on SampEn, K-means algorithm [47] (permitting to optimize specific detection parameters), and discrete wavelets was applied to each SU’s analyzed wideband spectrum in order to obtain the spectrum occupation given by . This result included three vectors which contained binary values indicating occupied (“1”) and empty (“0”) bands. The second vector was and contained the corresponding computed boundaries for each detected band, and the third was , which contained the power for each detected band.
4. New Proposal and Methodology
4.1. Proposal
4.2. Methodology
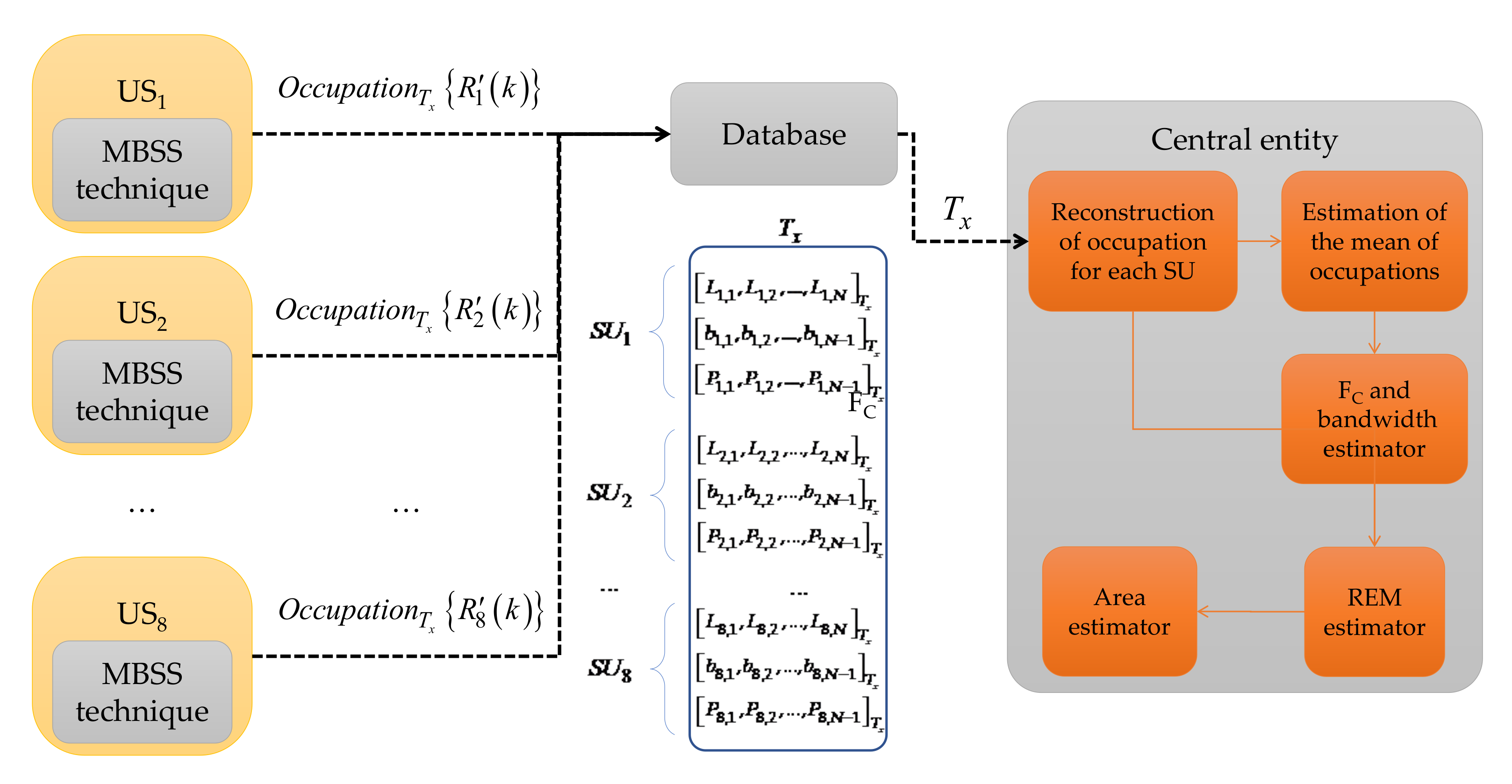
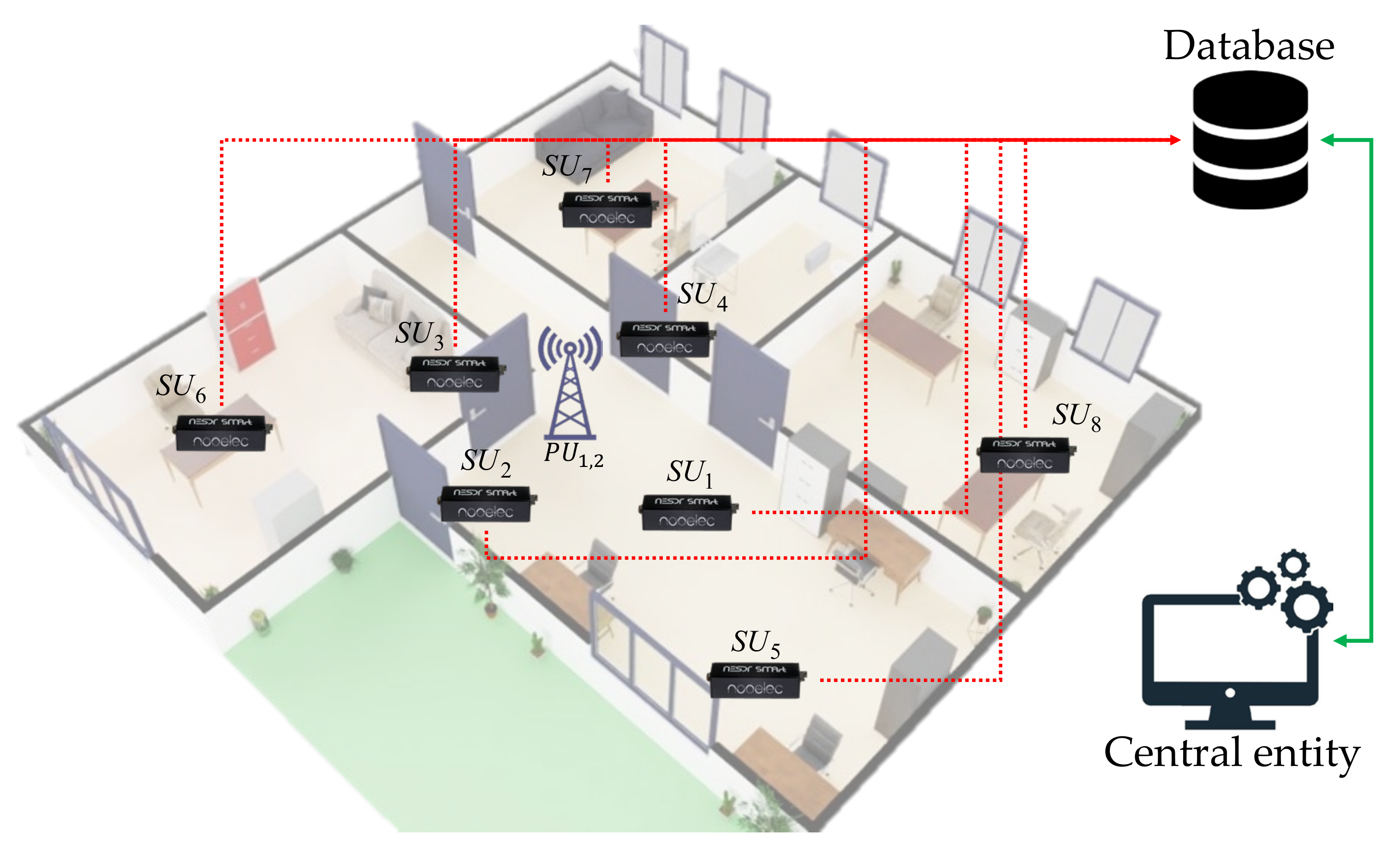
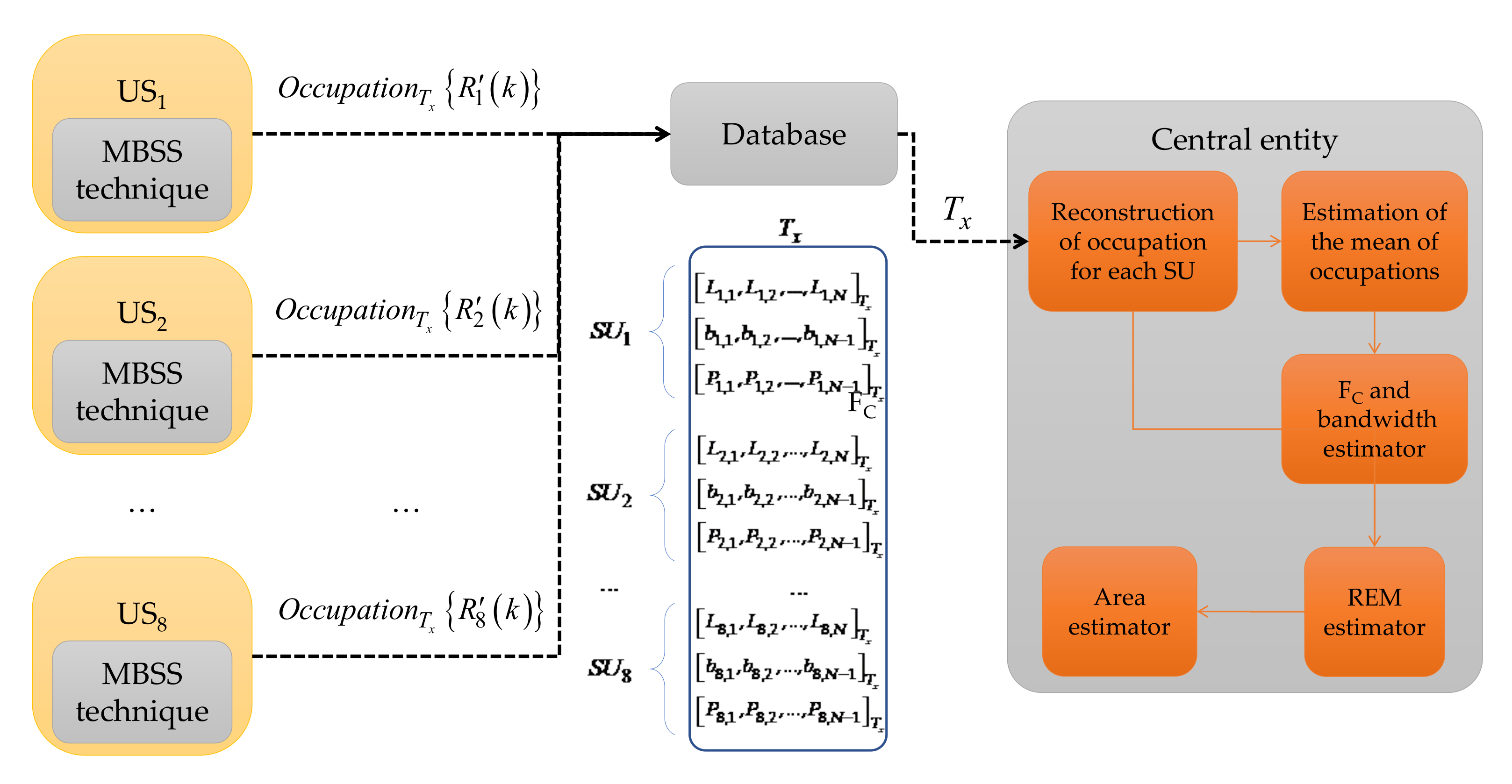
- The collection of information obtained by SUs. For this, each SU locally processes the sensed data to be sent to a central entity, including the occupancy of the observed spectrum in its geographic location and the frequency band edges and estimated power vectors;
- The database for storing the information obtained by each SU at a specific time;
- The central entity overseeing the processing determines the geographic area occupied by the detected PUs in the radio spectrum.
4.2.1. Collection of Information Locally by the SUs
4.2.2. Database
4.2.3. Central Entity
4.2.3.1. Central Entity Implementing Classical Digital Signal Processing
| Algorithm 1 Central Entity Computed by Traditional Signal Processing | |
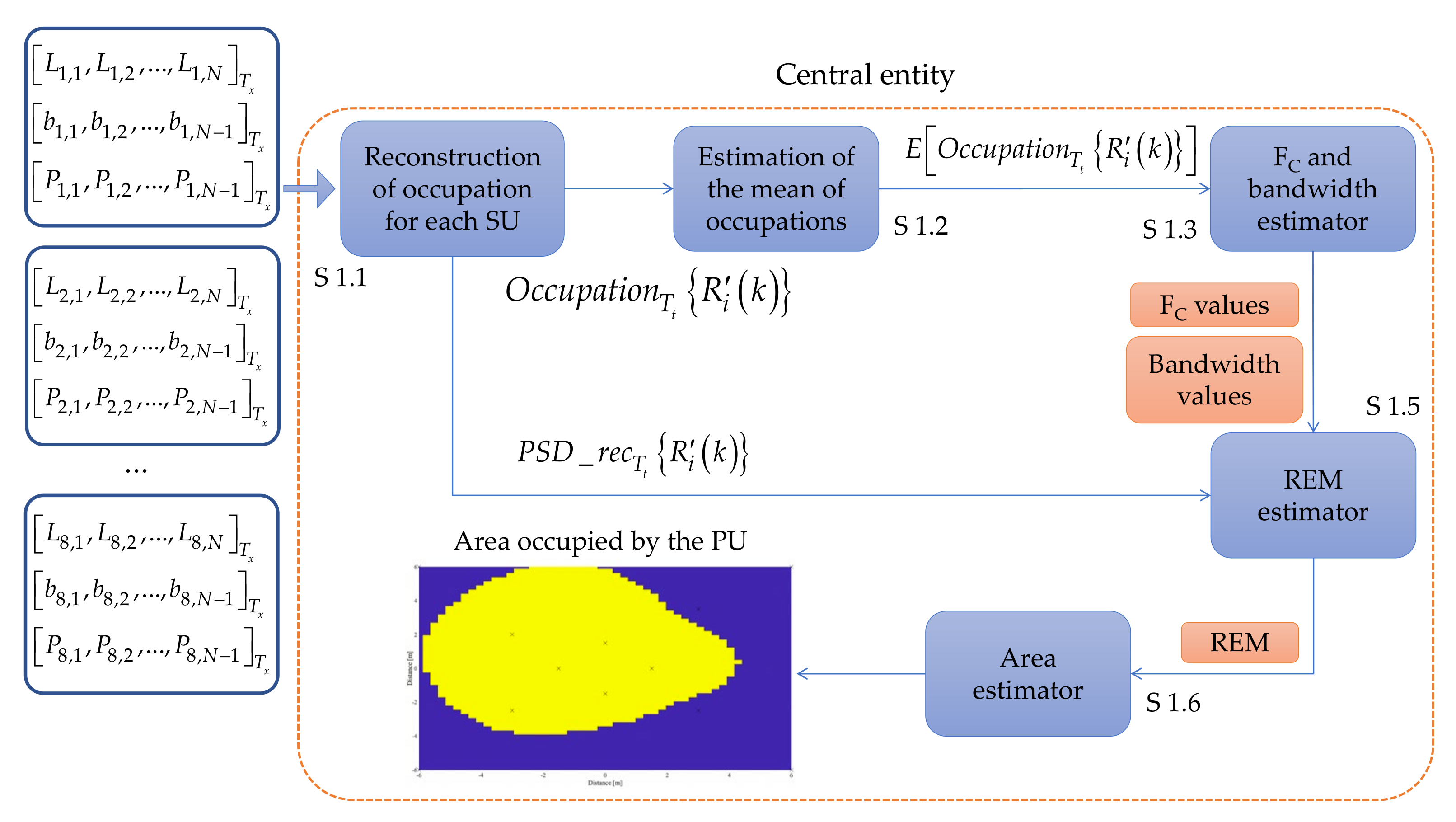
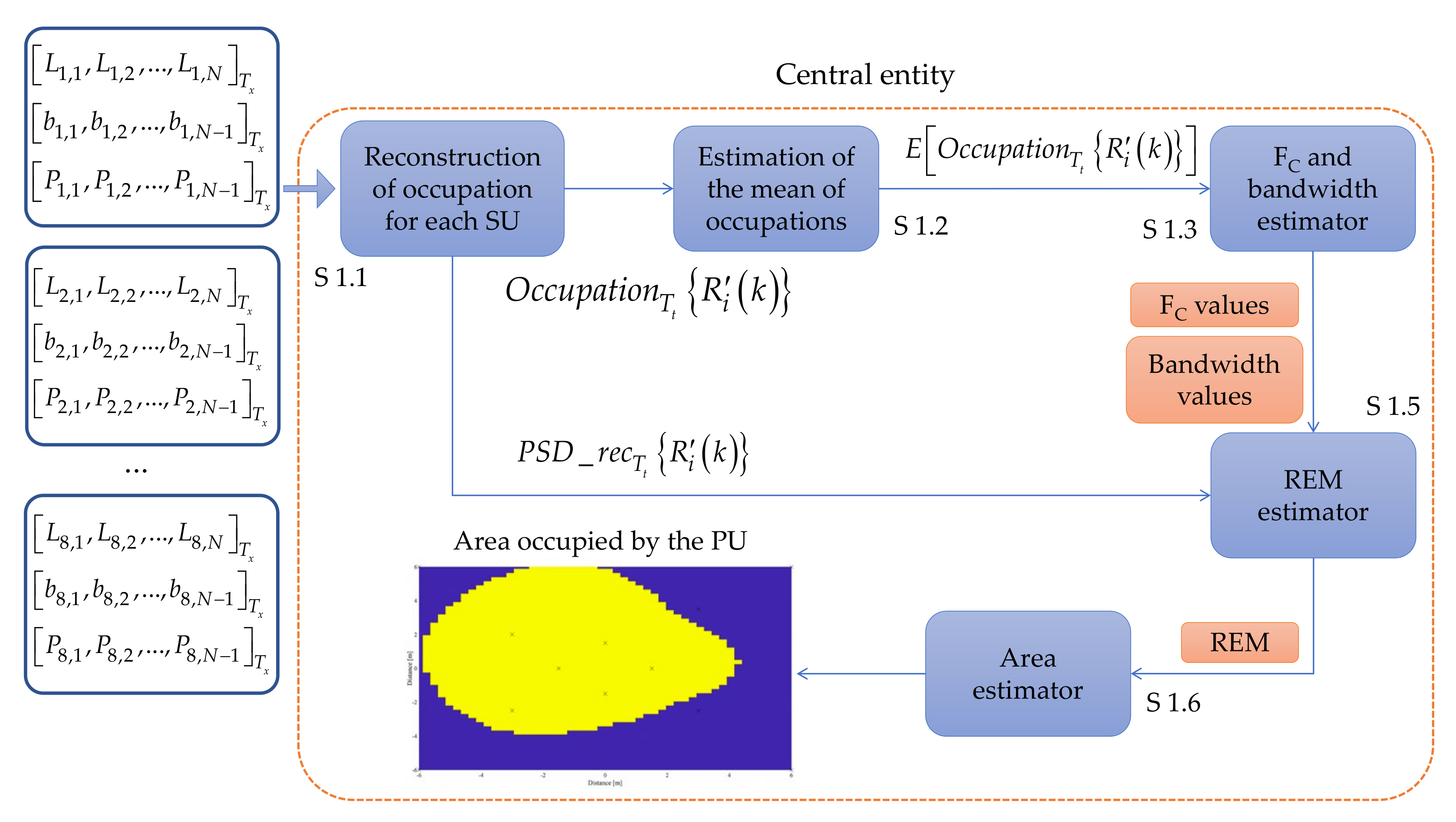
| Step 1.1 | using only the average powers (power vector) associated to each SU. The length of these frames is set to 1024 samples. |
| Step 1.2 | is computed. |
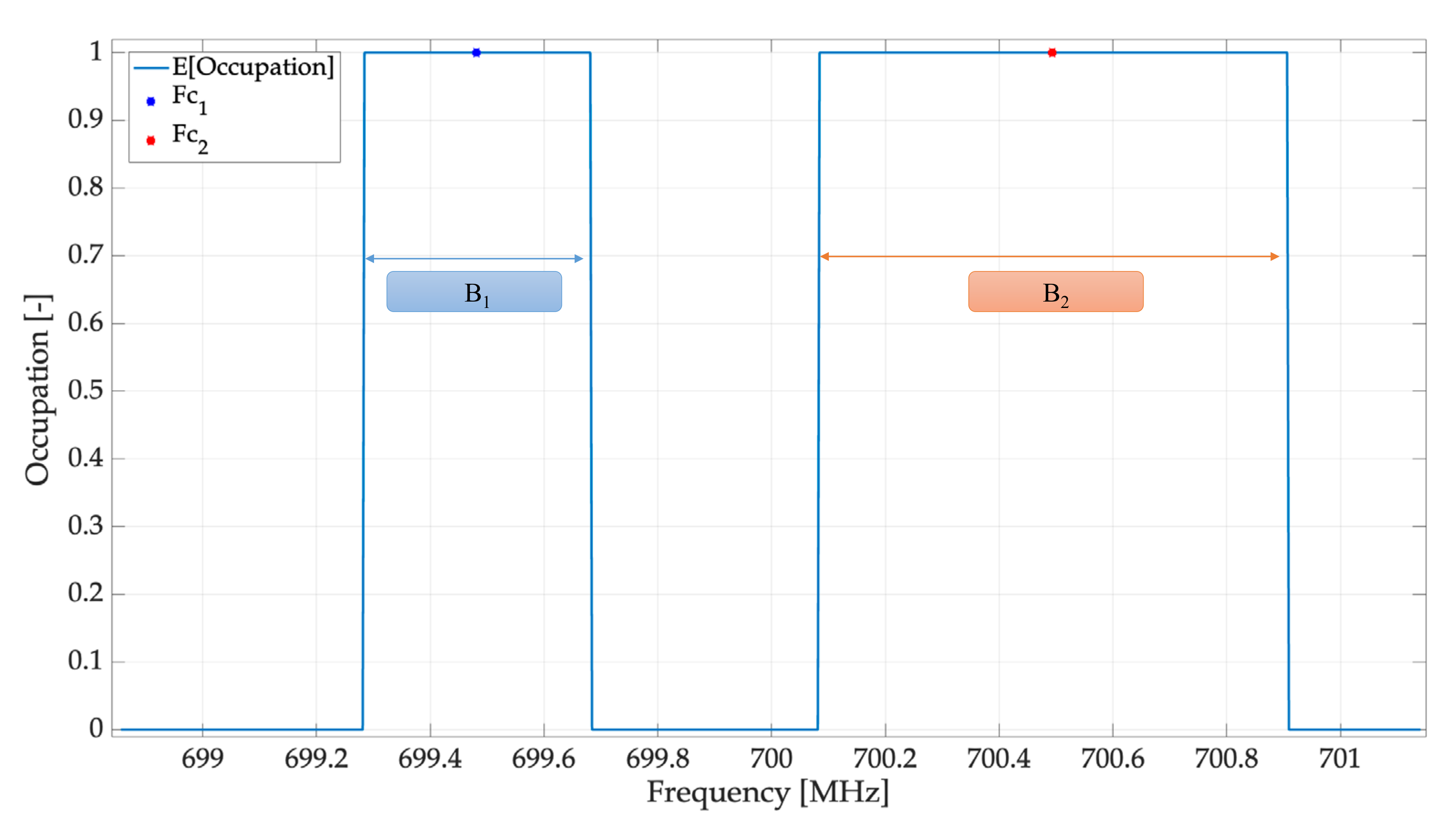
| Step 1.3 | is integrated by the central frequency values of estimated bandwidth for each detected PU. |
| Step 1.4 | is or should be. |
| Step 1.5 | . |
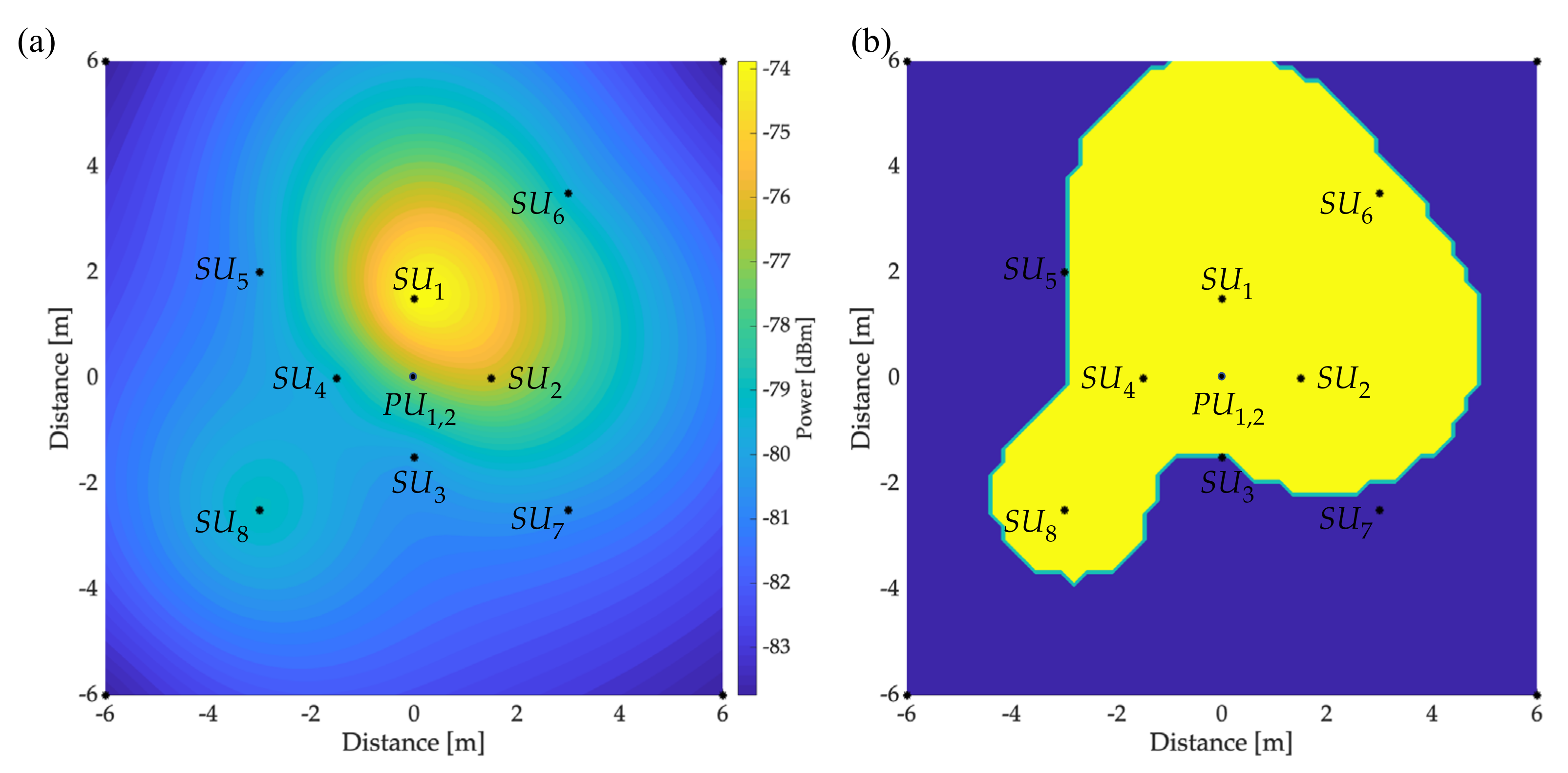
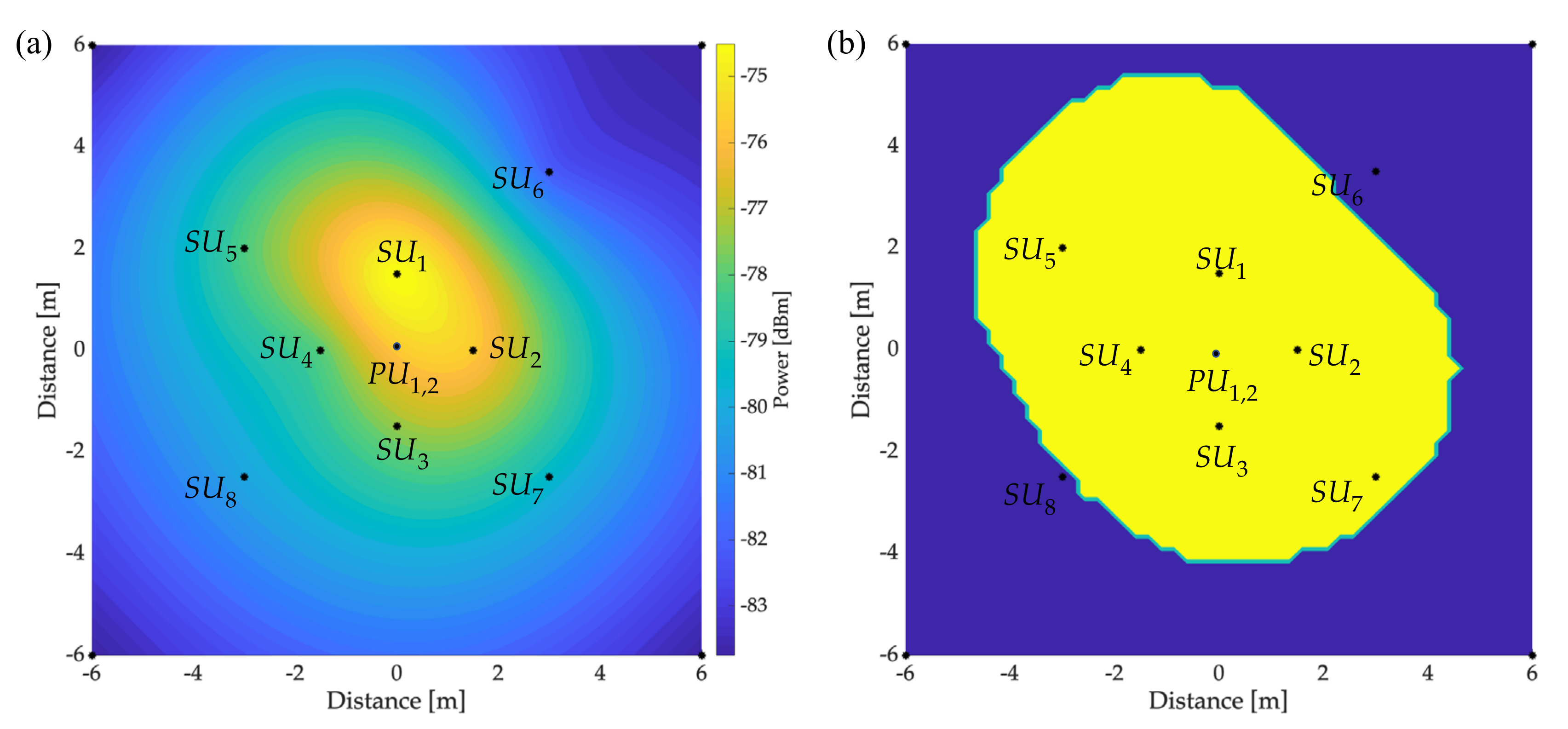
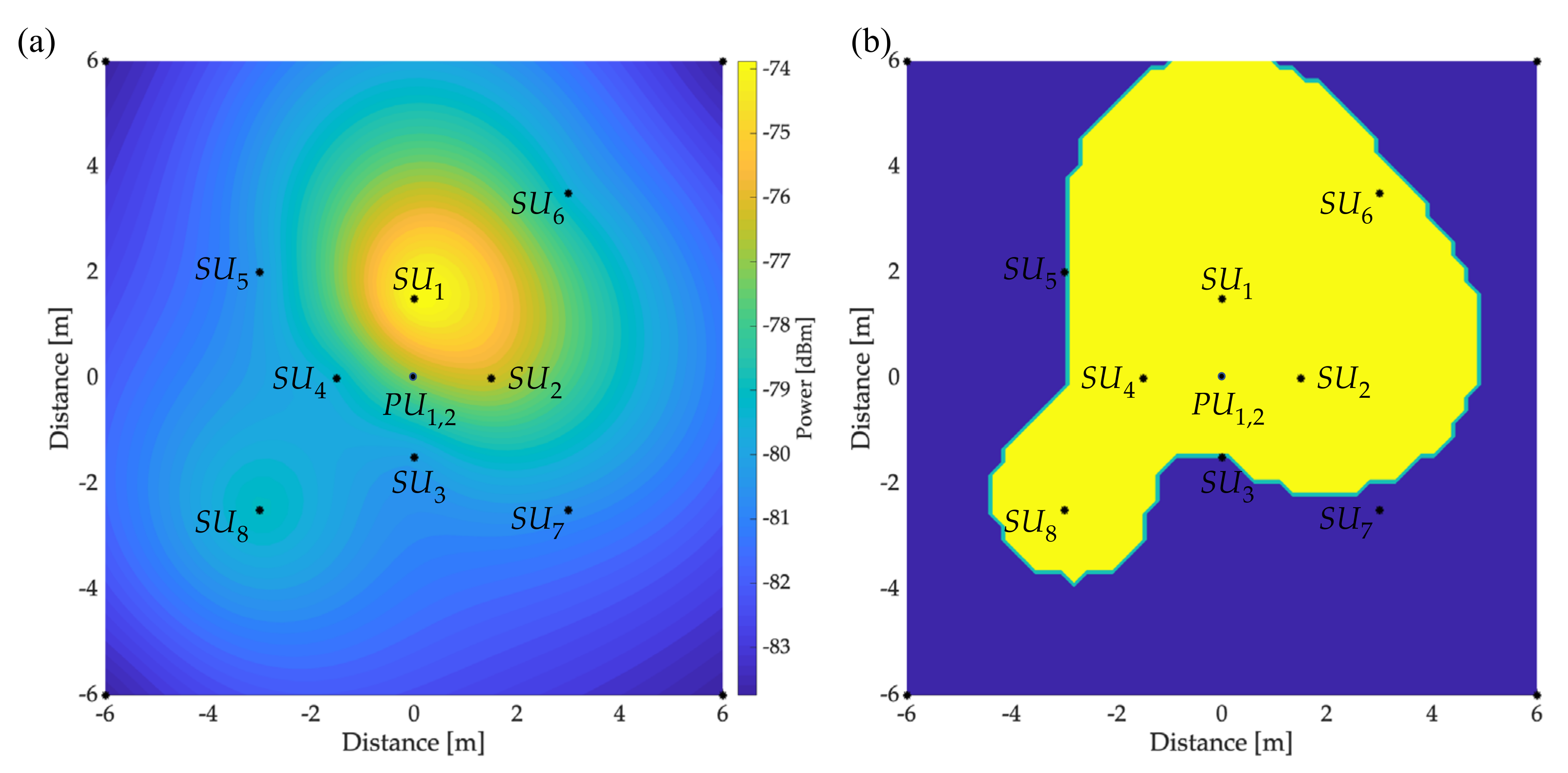
| Step 1.6 | dBm is used to classify the area estimated by the REMs that was chosen in [41] for a wireless environment. That is, regions in the REM that are above this threshold correspond to the active area of detected PUs. |
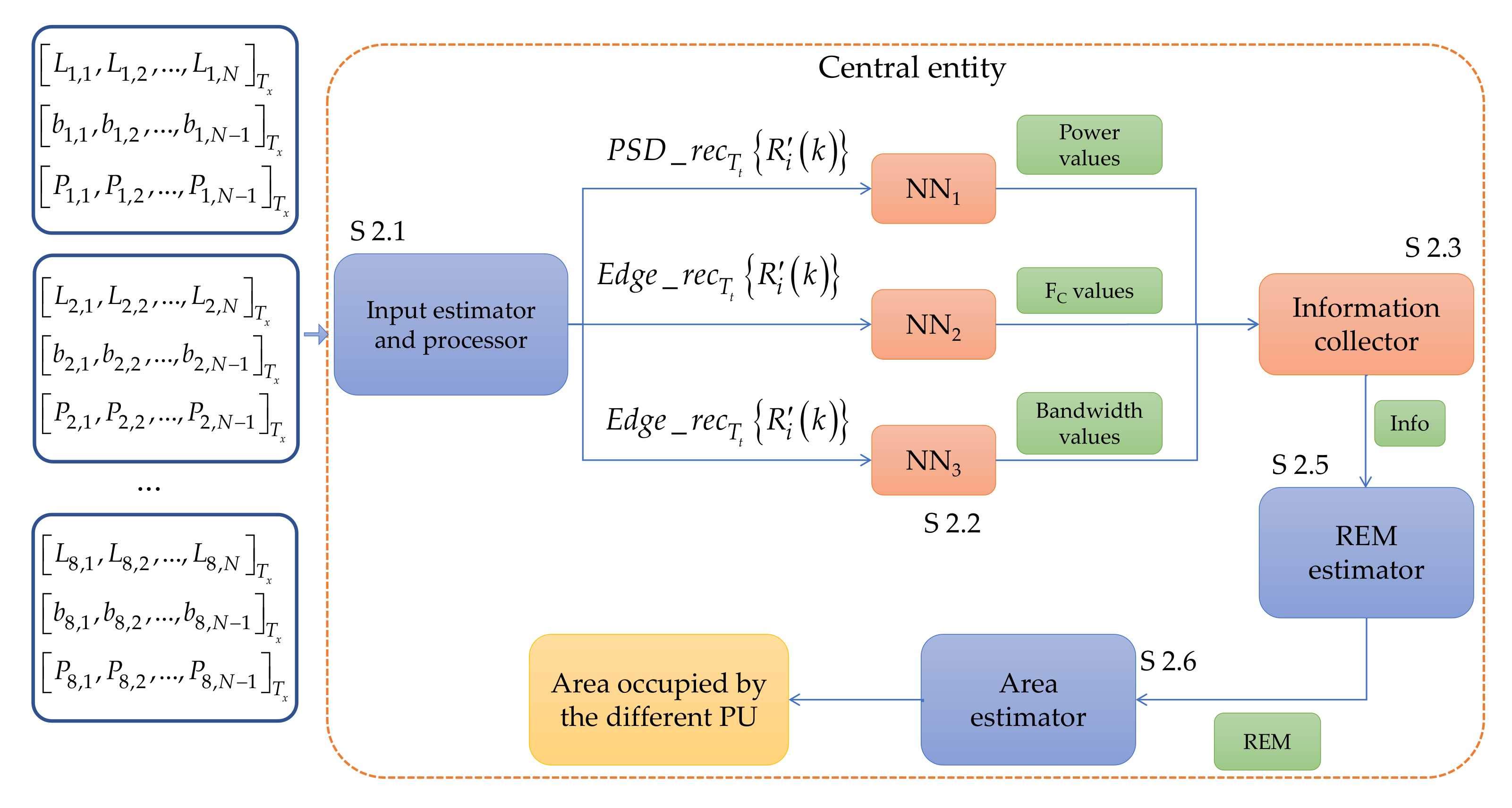
4.2.3.2. Central Entity Implementing Neural Networks
| Algorithm 2 Central Entity Computed by NNs | |
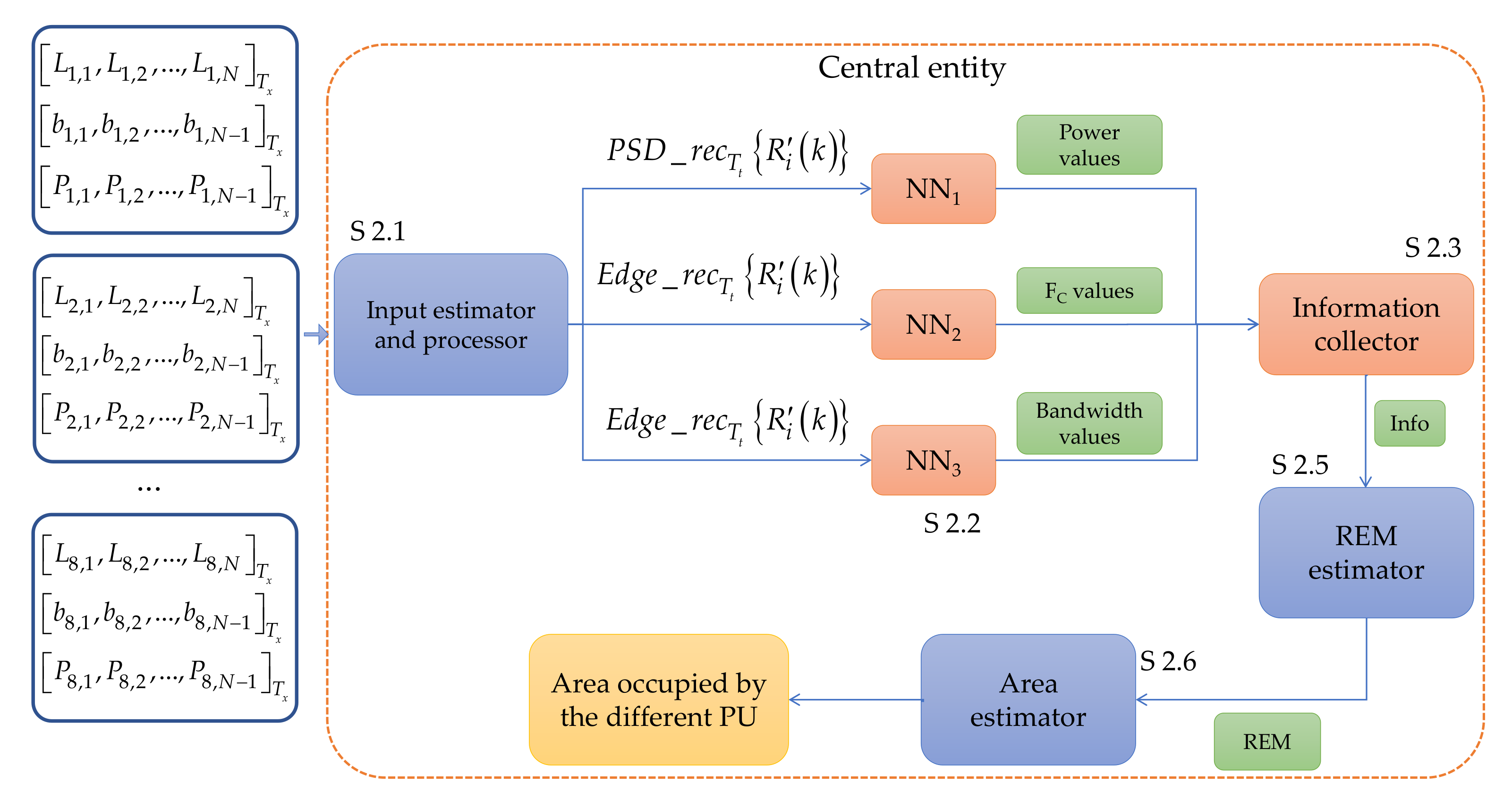
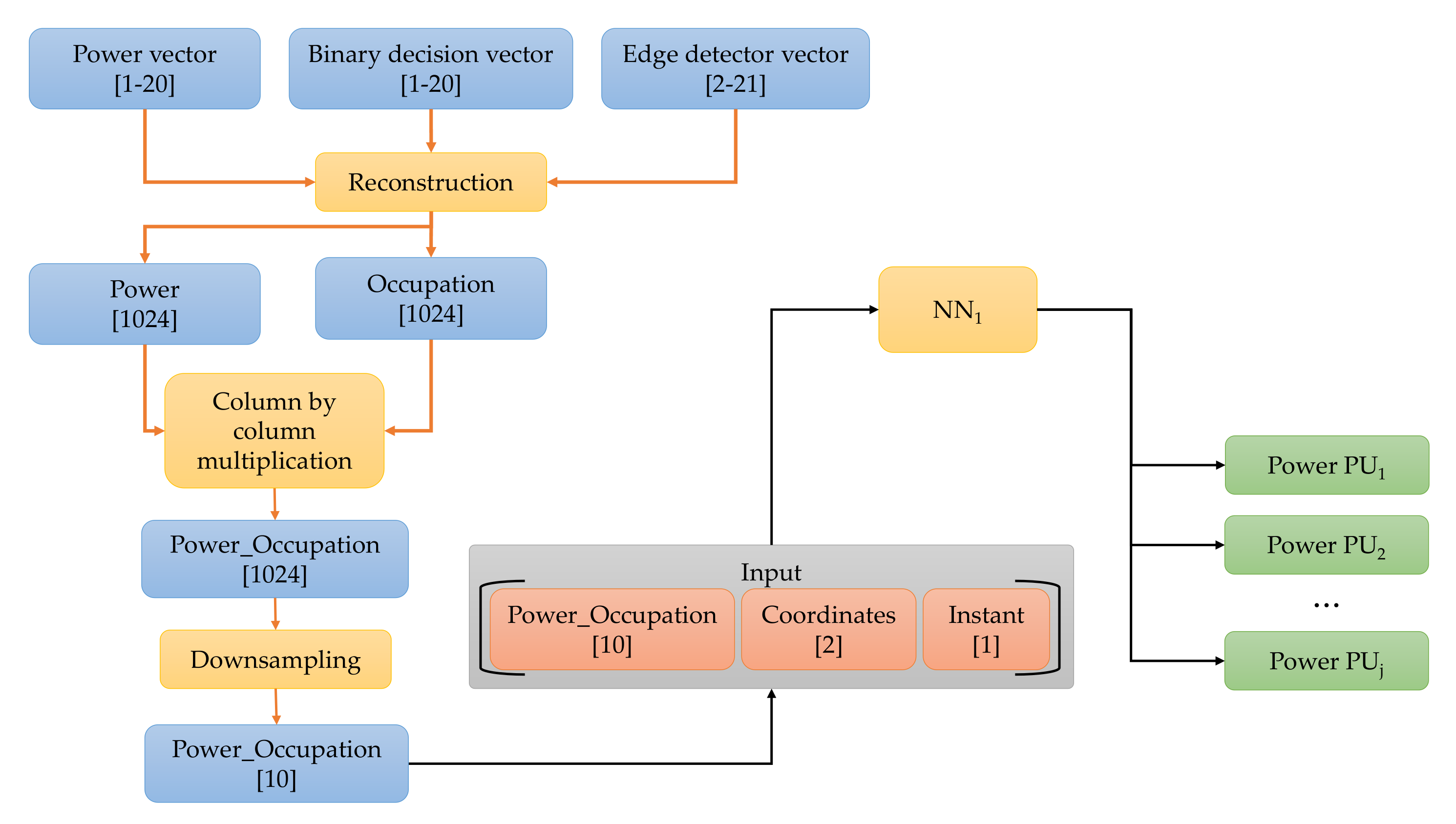
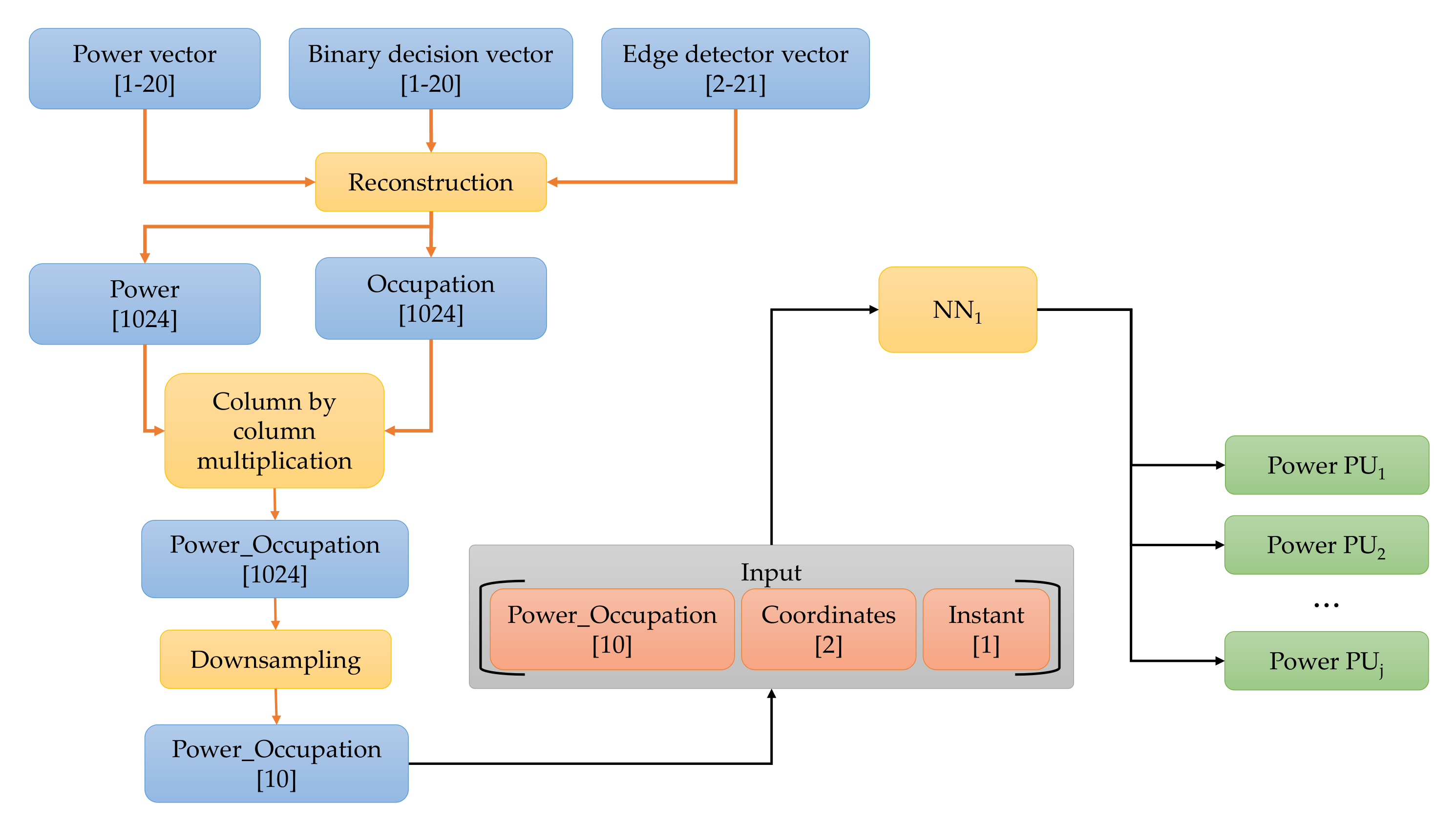
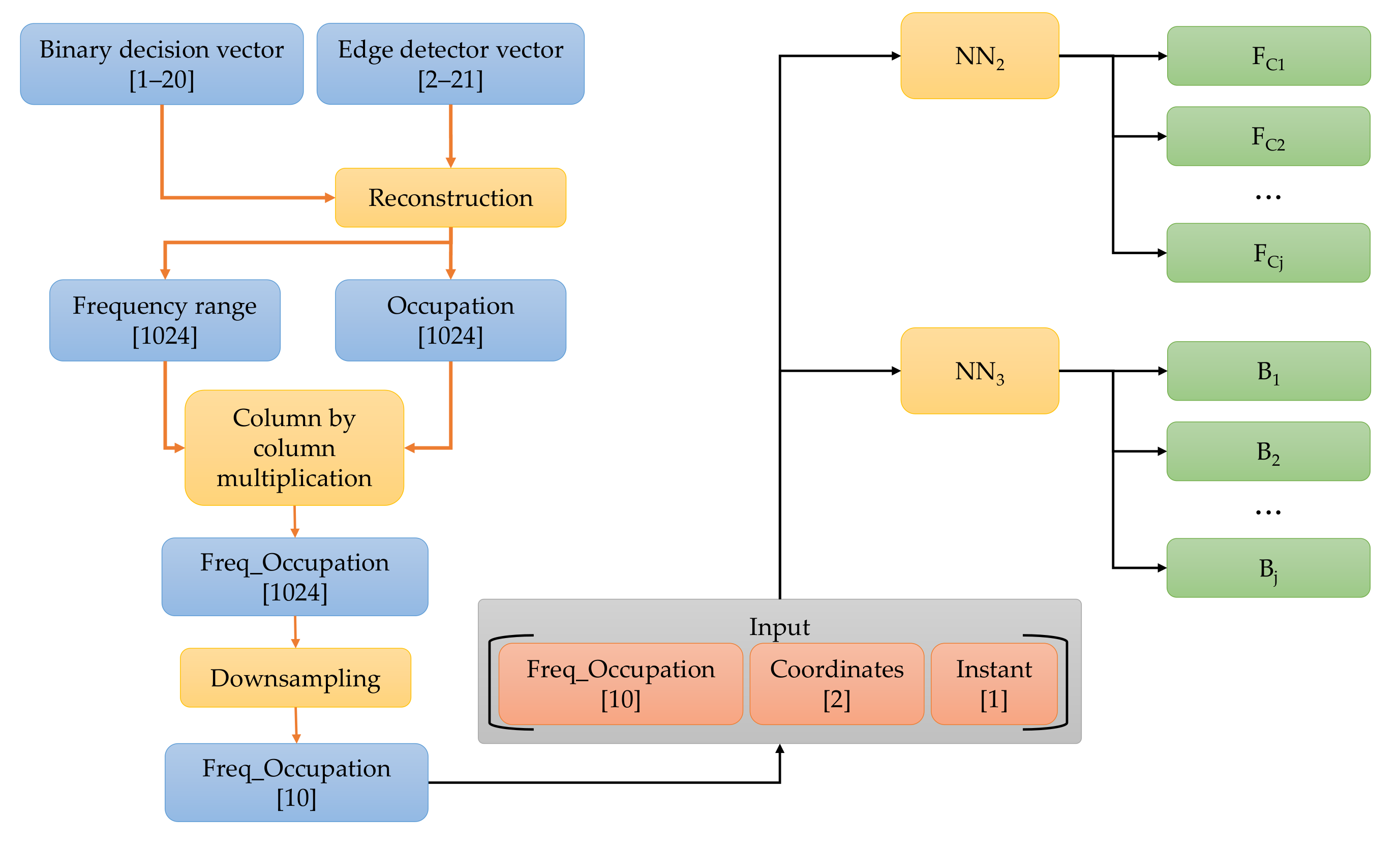
| Step 2.1 | driving the NNs. For this, these vectors must have always the same length (in our case this length is set to 13 samples). This block is detailed below. |
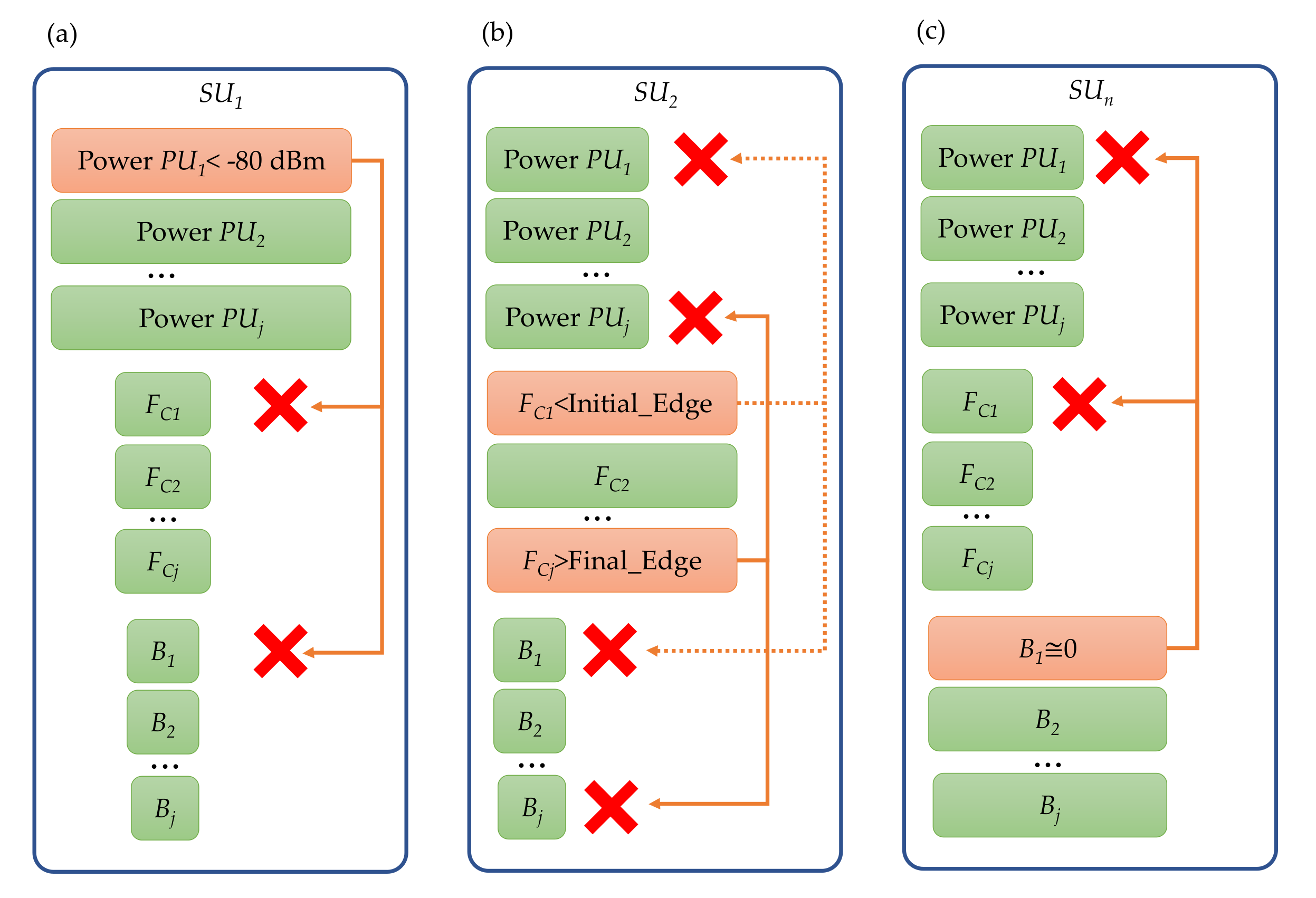
| Step 2.2 | returns an approximate number of detected PUs and their bandwidths. At the end of this section, it is discussed what would happen if the number of PUs detected by each NN is not the same. |
| Step 2.3 | The information obtained from Step 2.2 is evaluated to determine the number of PUs in the spectrum and their corresponding power, bandwidth, and carrier frequency. This evaluation is detailed below. |
| Step 2.4 | in which the spectrum was monitored. |
5. Real Wireless Communication Environment
6. Results
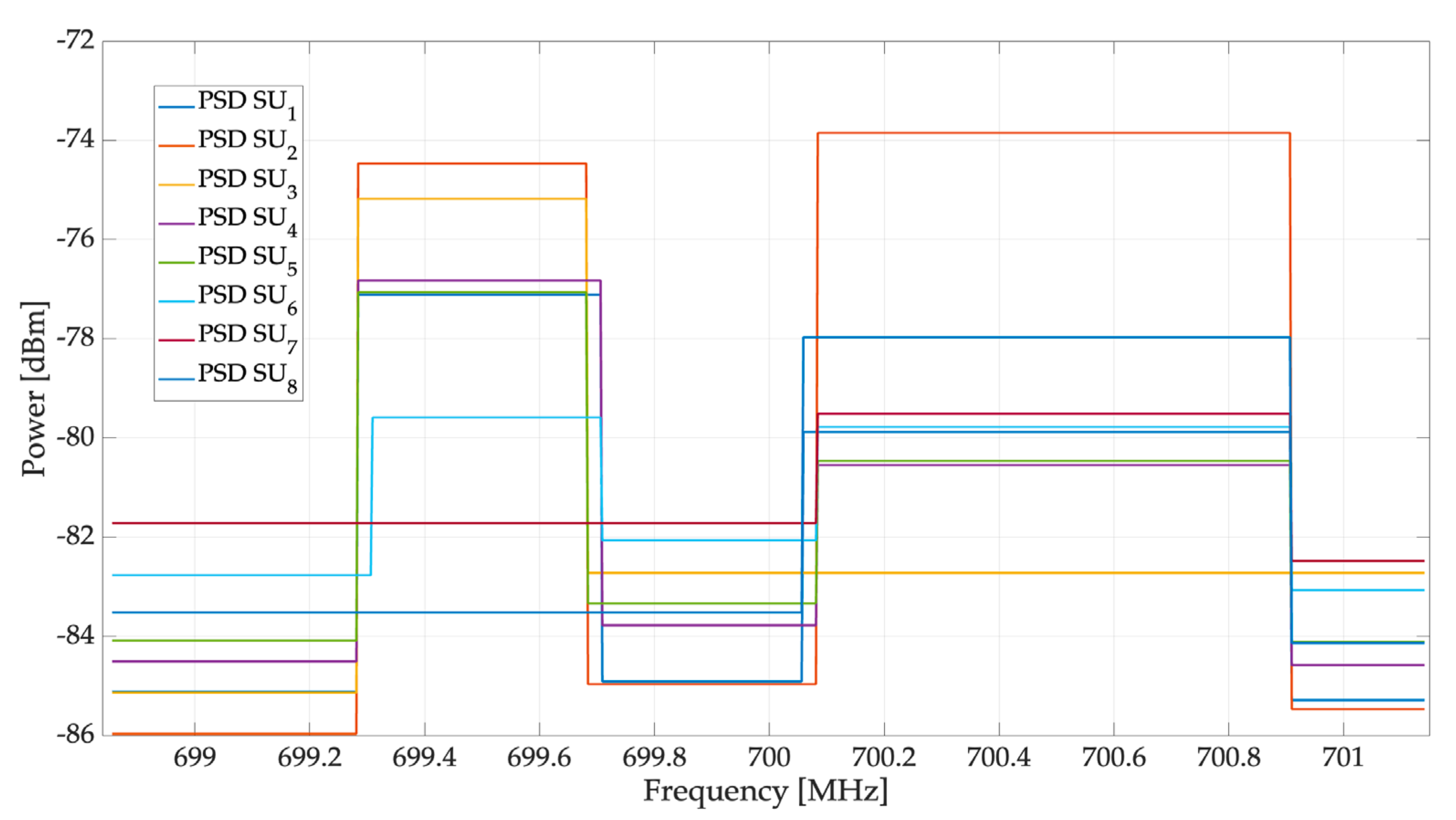
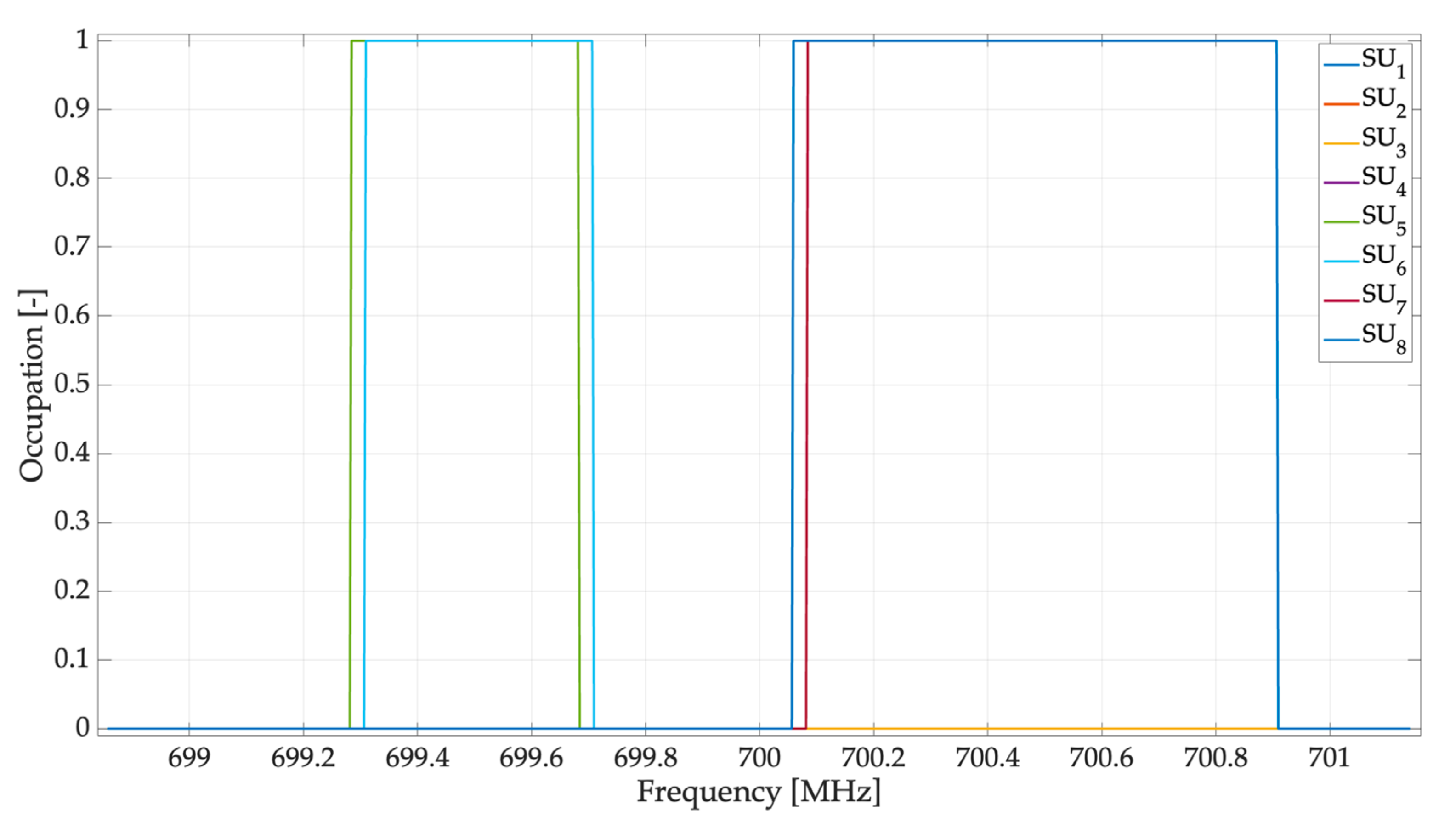
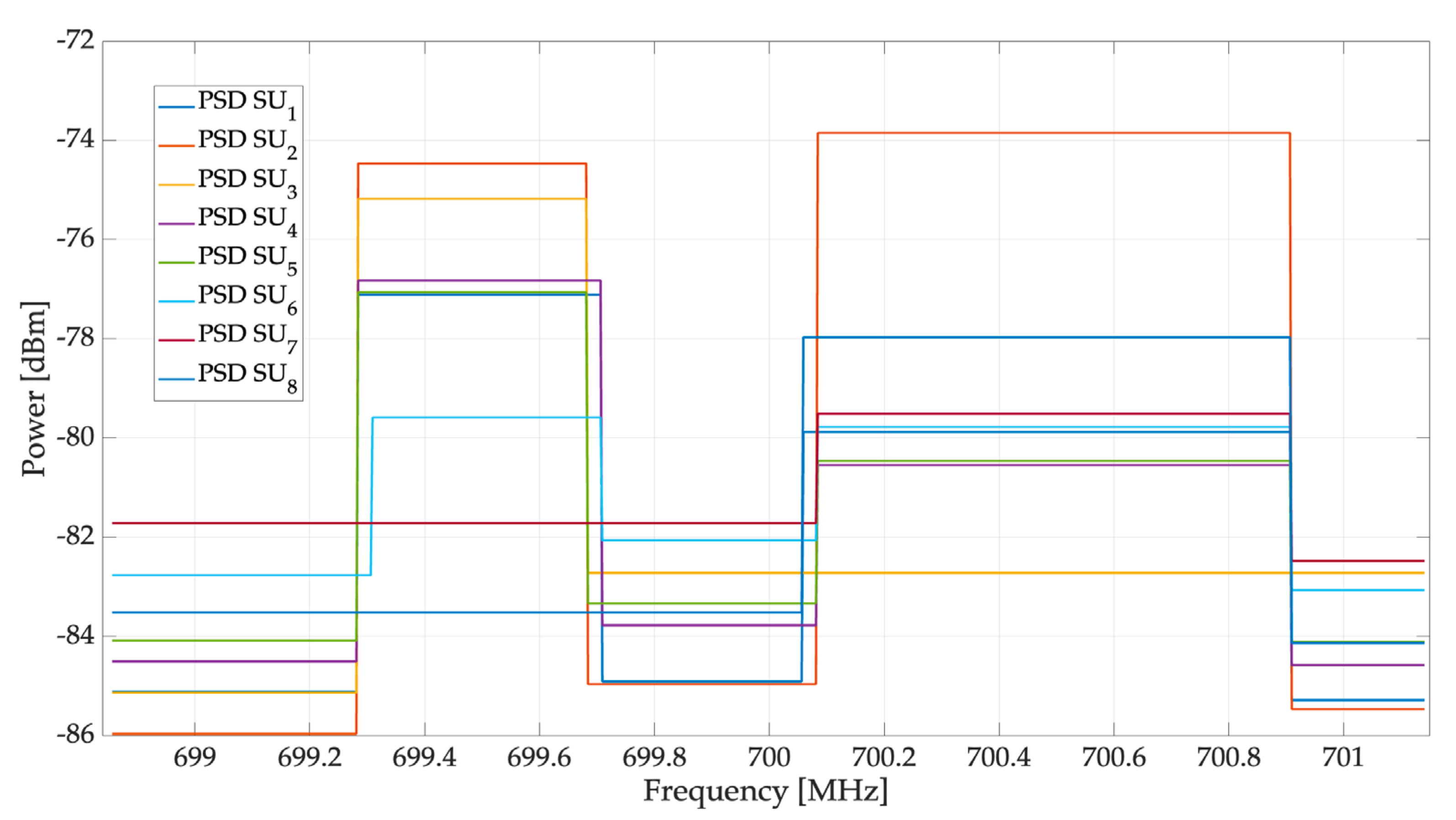
6.1. Results with a Central Entity Based on Digital Signal Processing
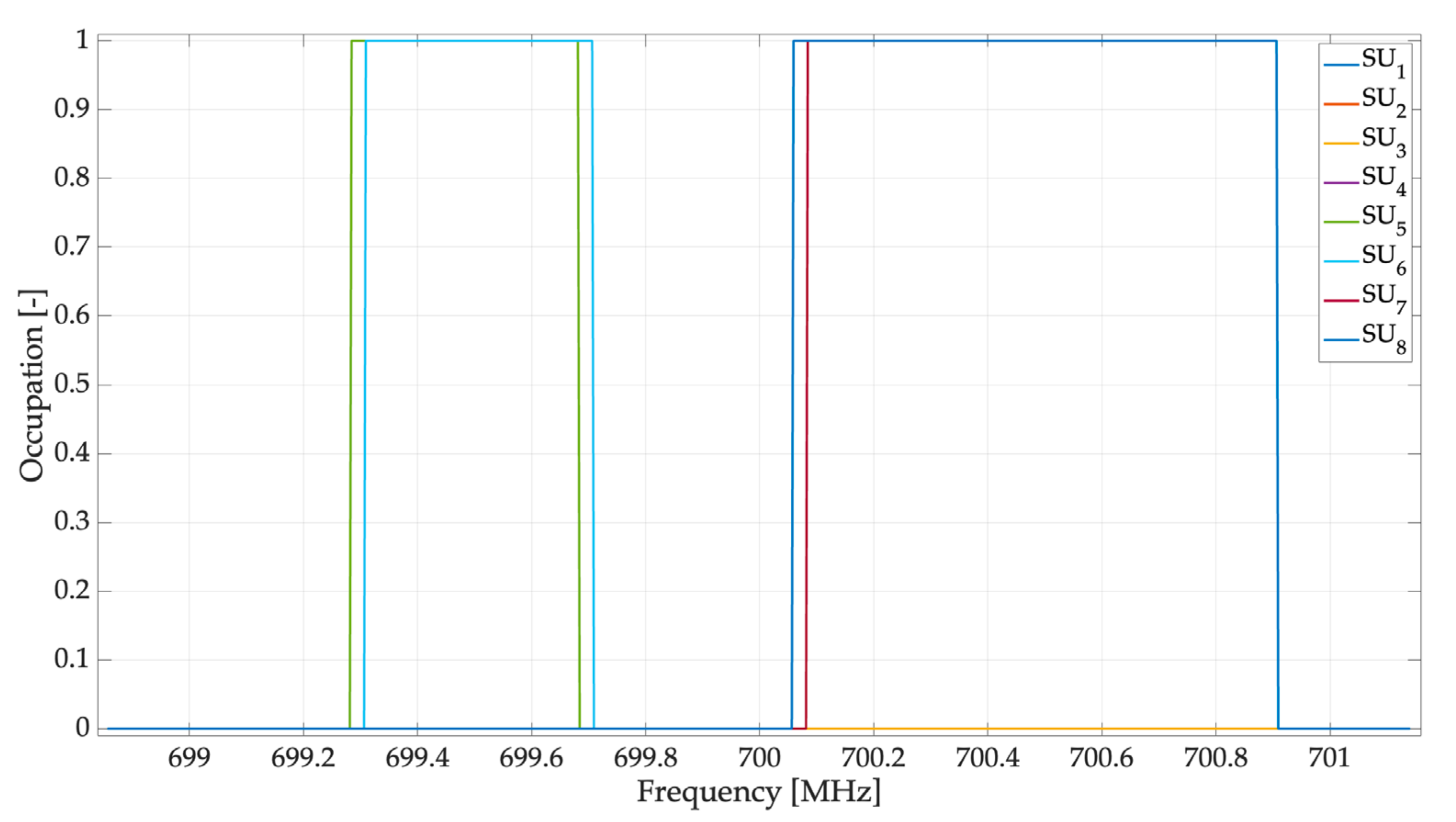
- There were SUs who failed to perceive both PUs;
- The central frequency of each PU was perceived at a different frequency by each SU;
- The bandwidth size for each PU varied for each SU;
- SUs that were the farthest from the PUs failed to detect both PUs.
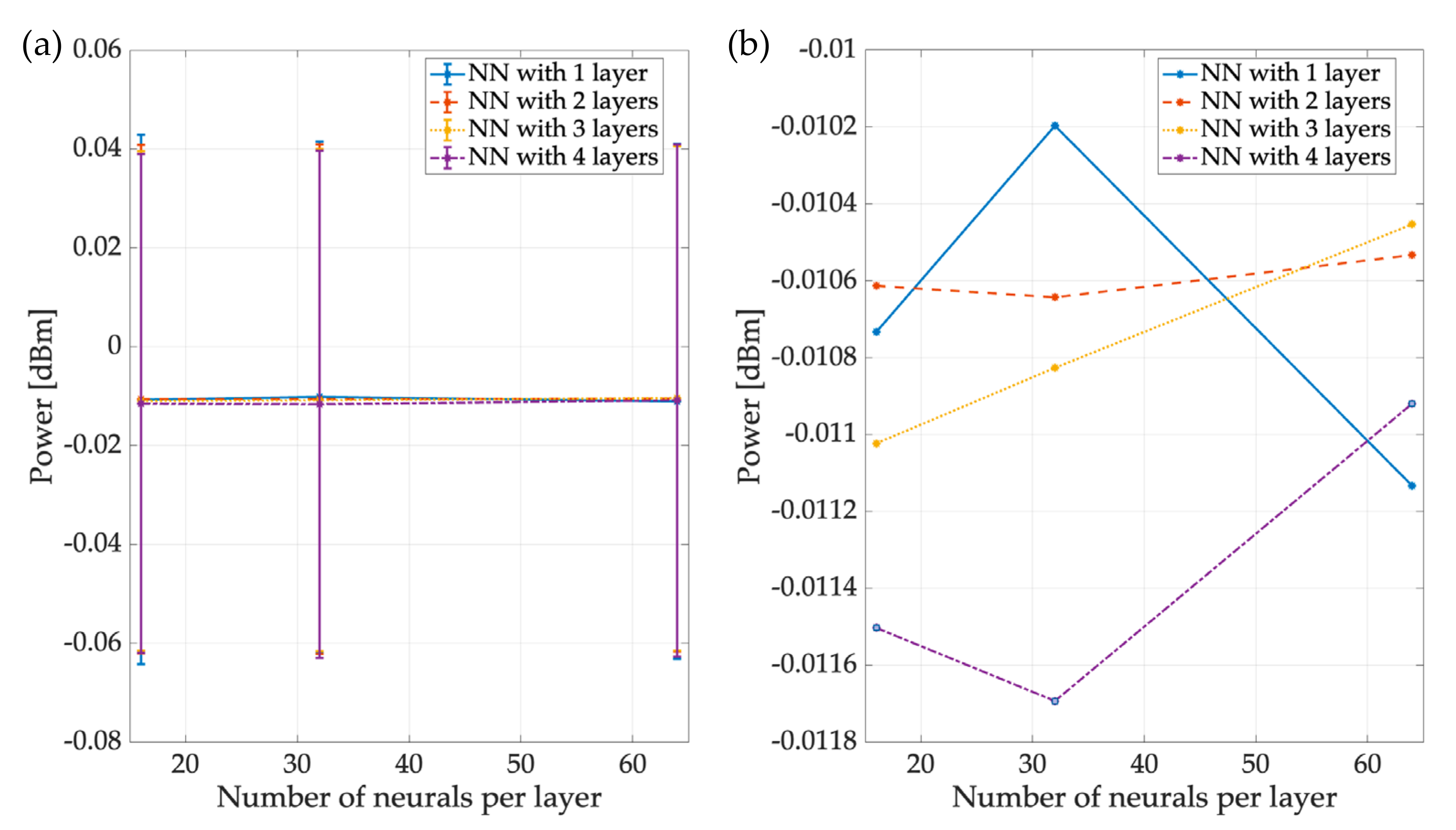
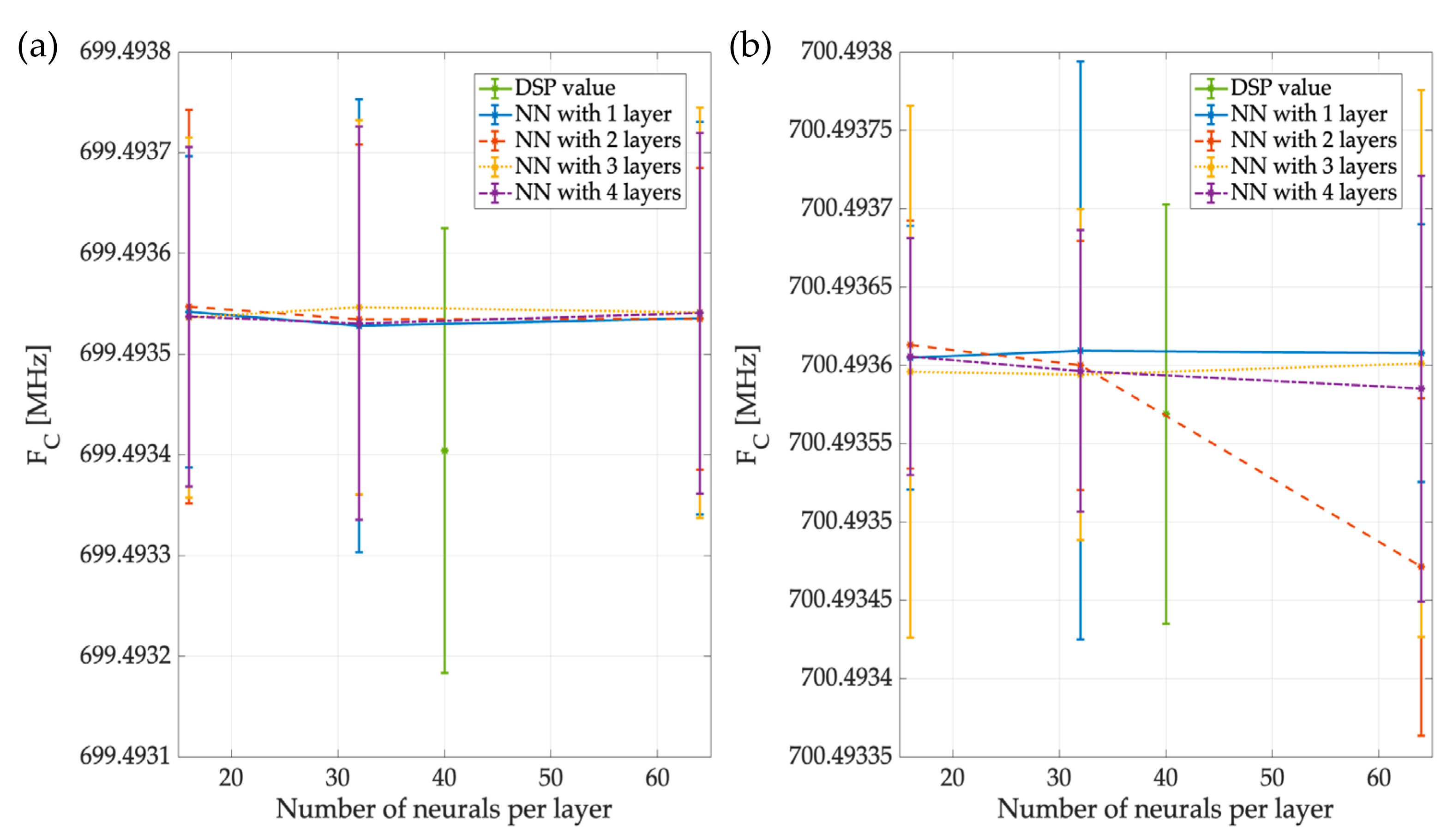
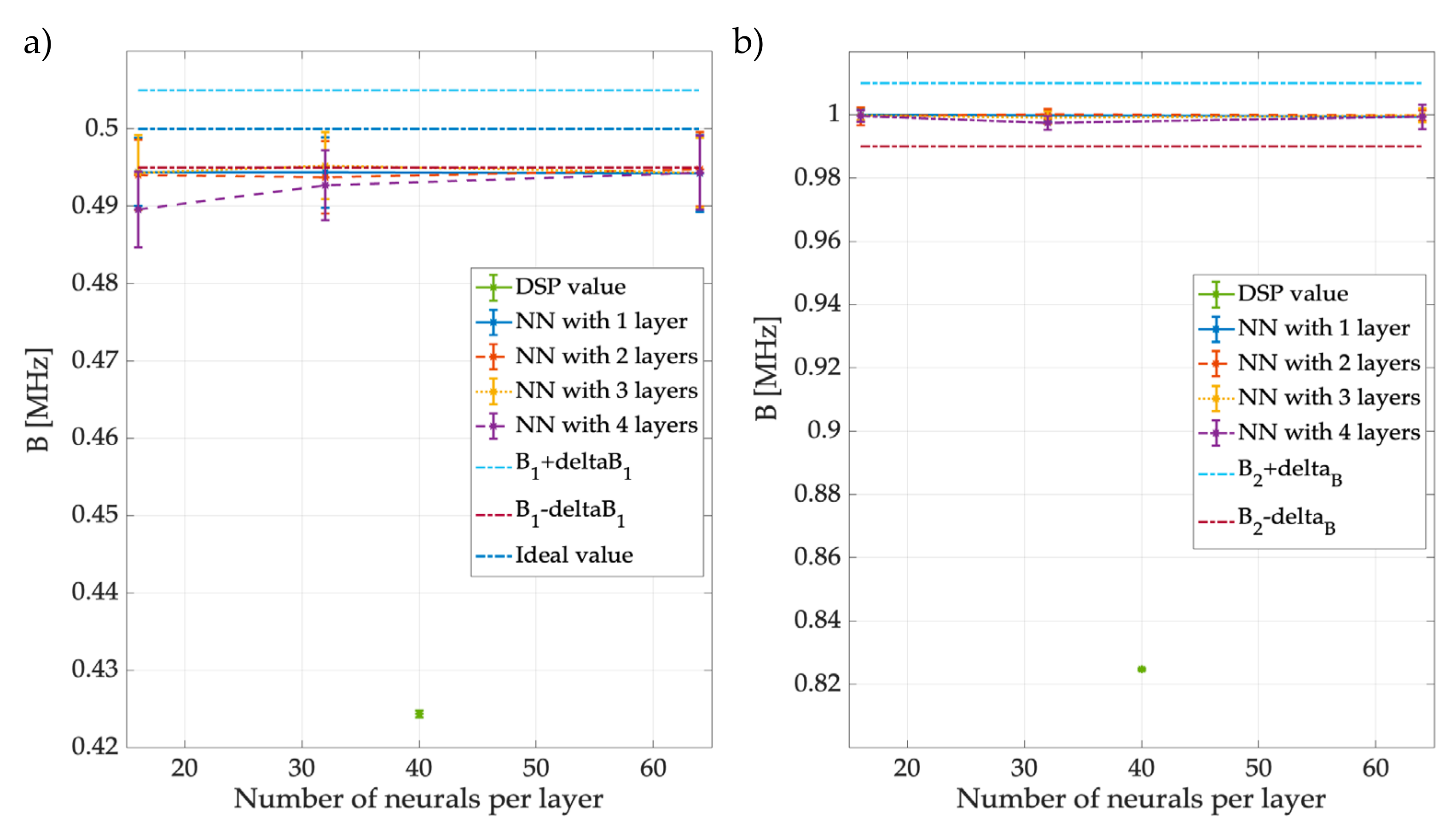
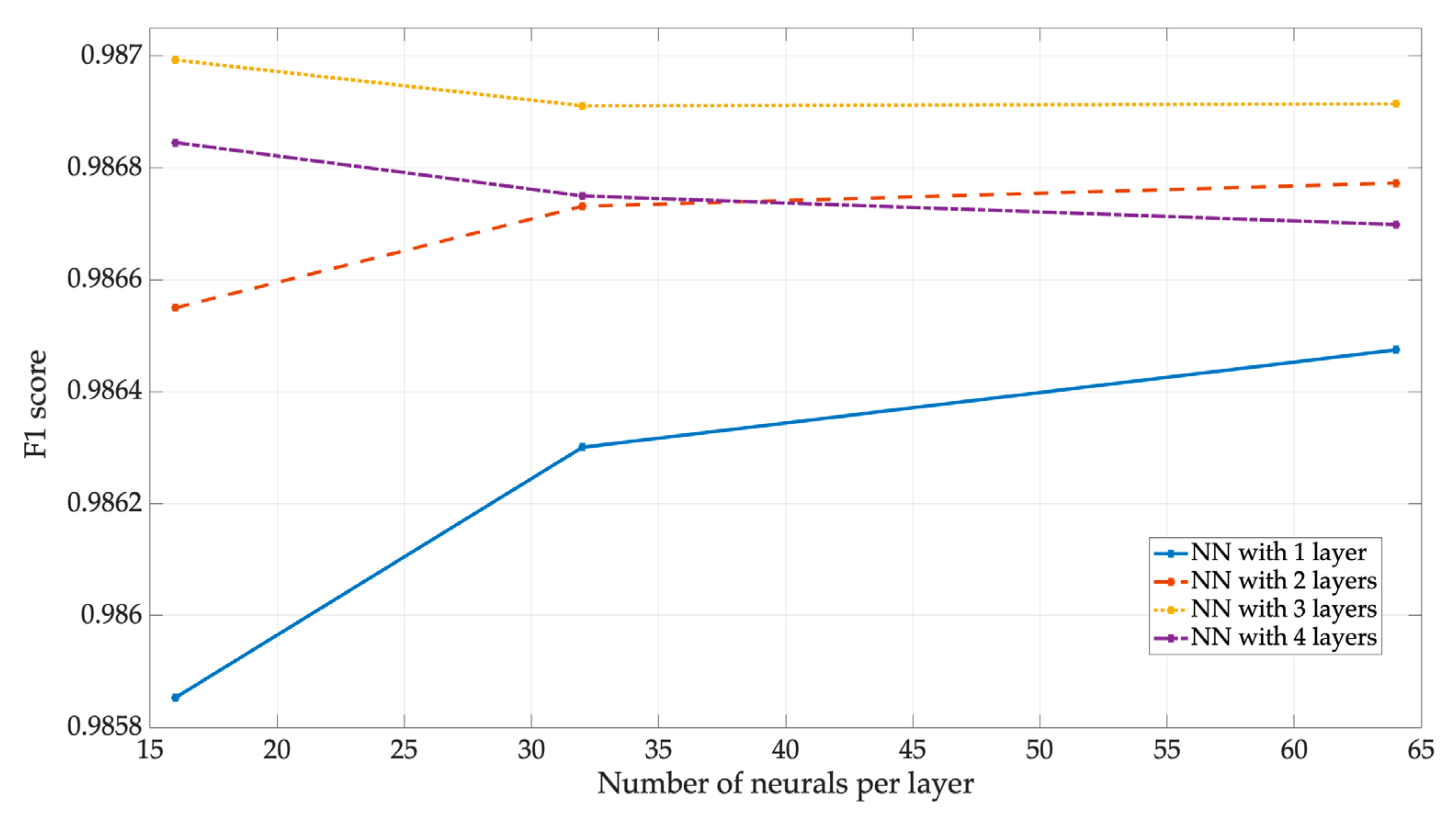
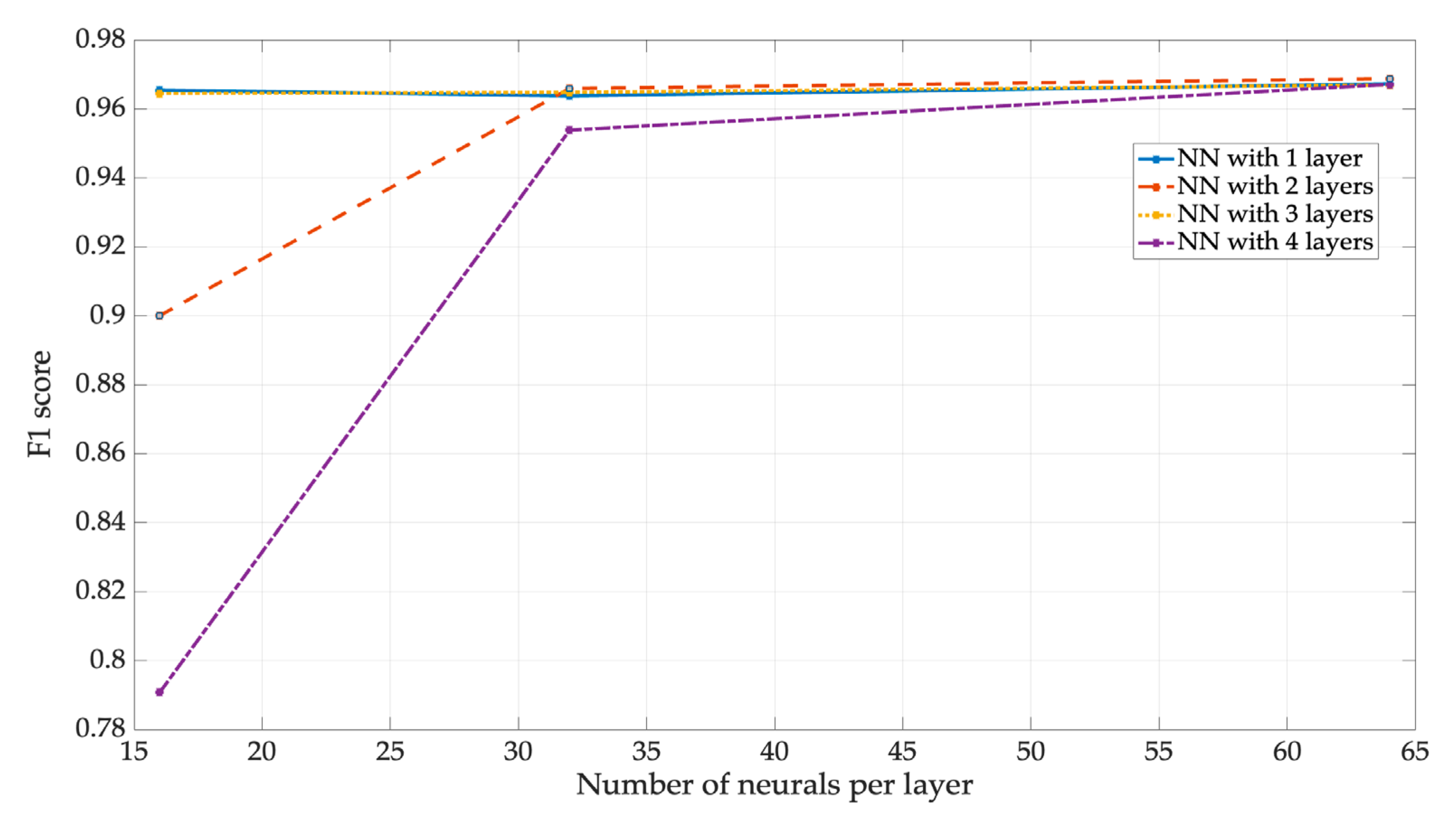
6.2. Results with a Central Entity Based on NNs
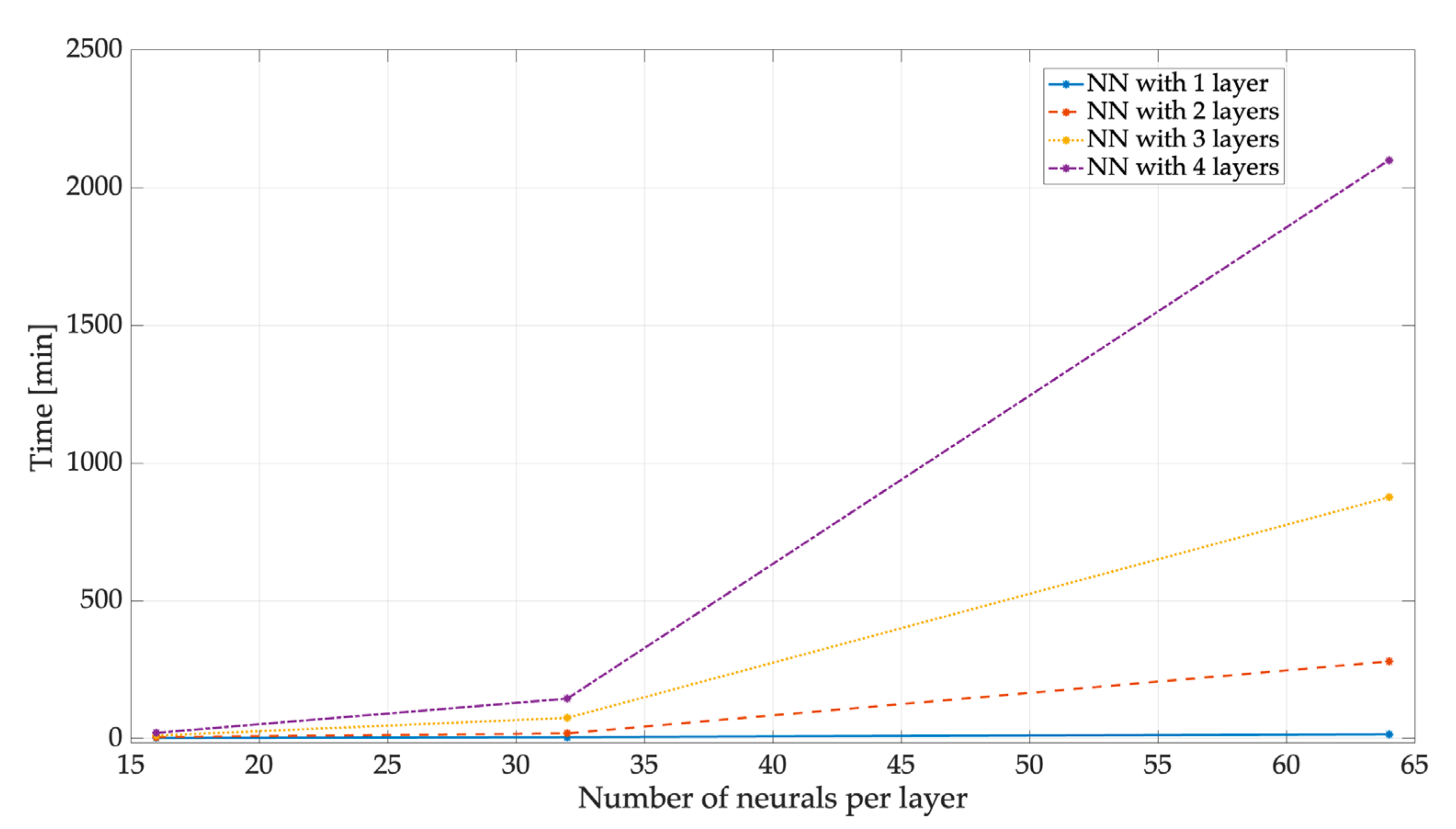
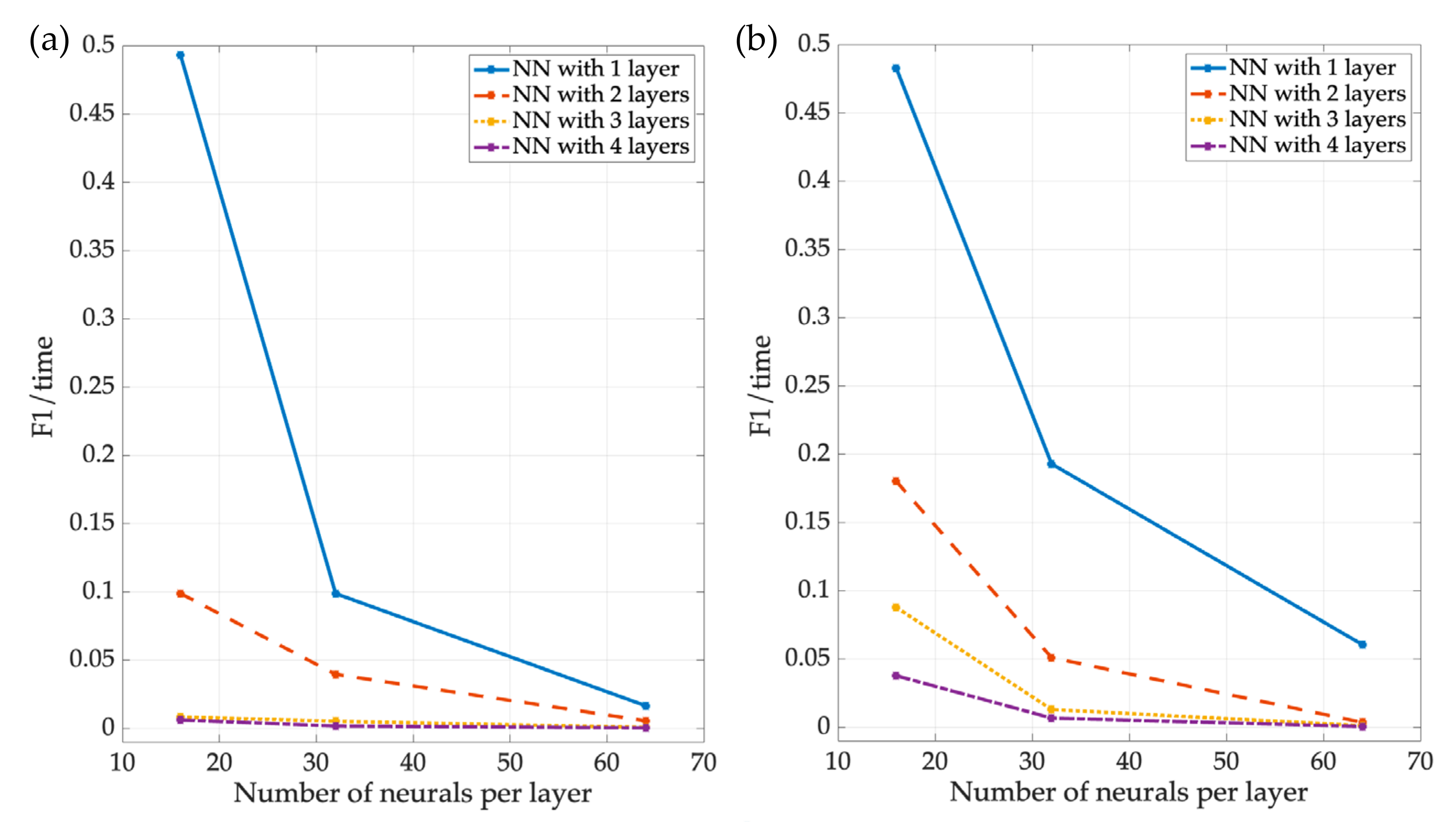
6.2.1. Training
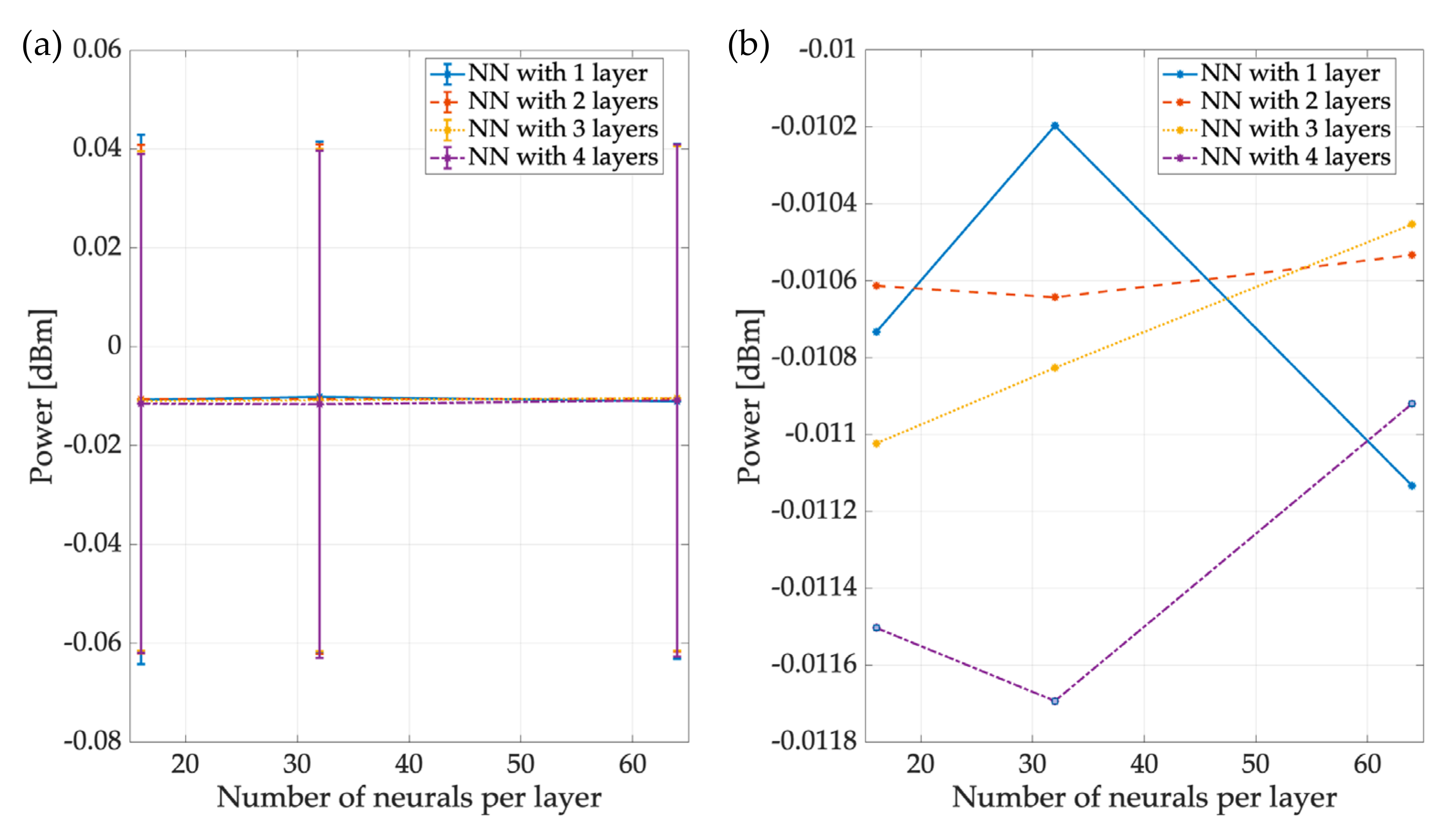
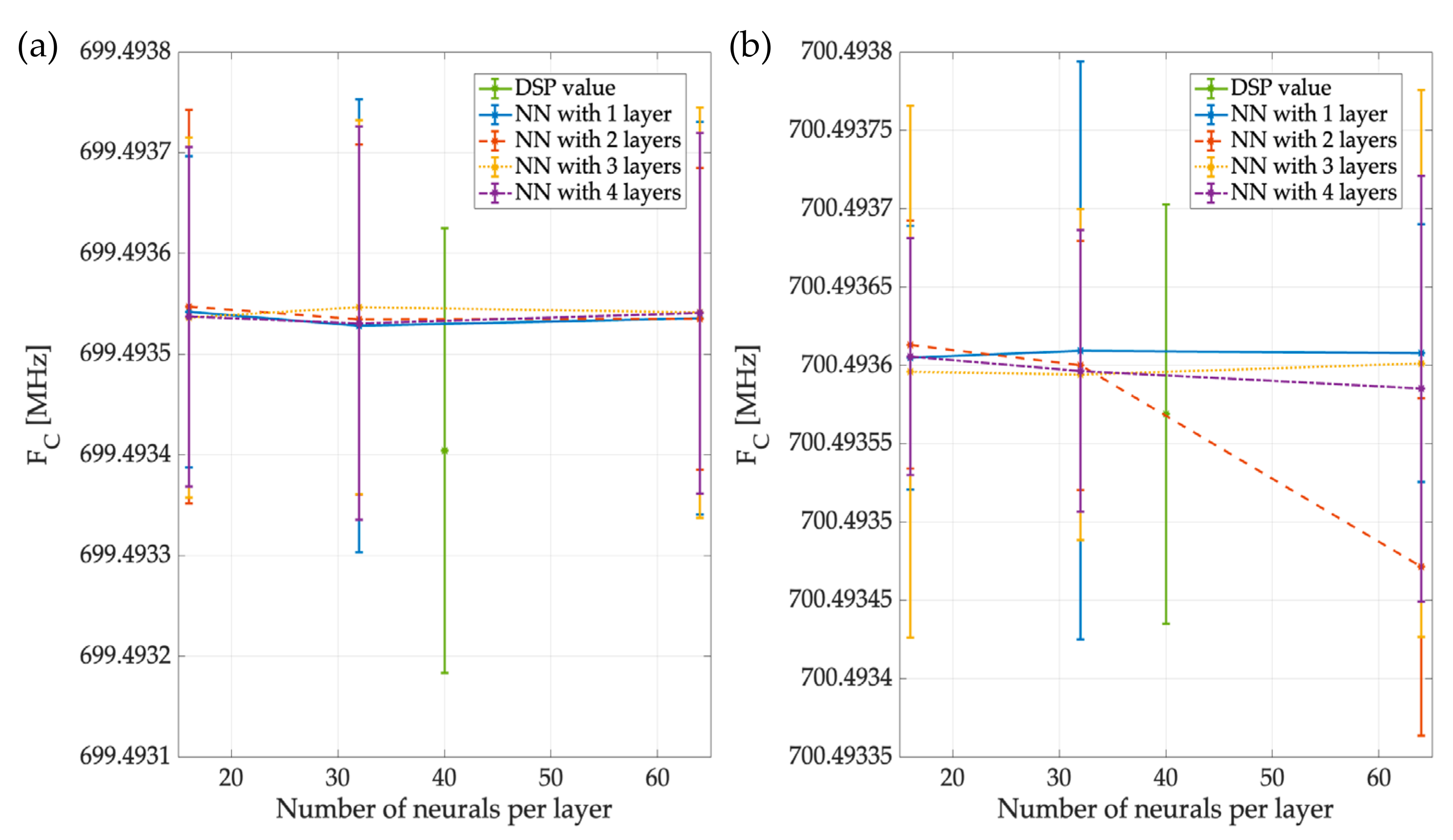
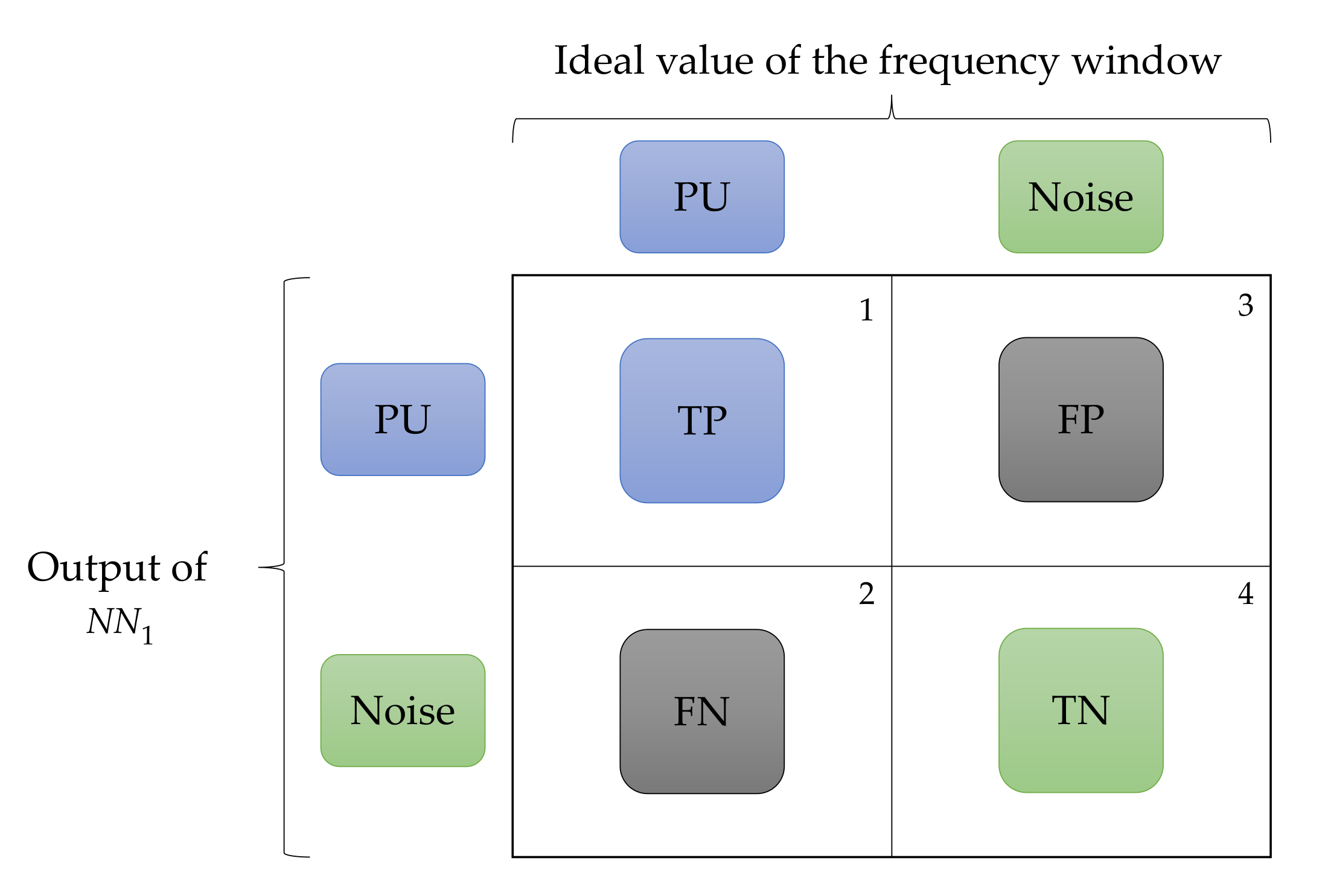
6.2.2. Statistics
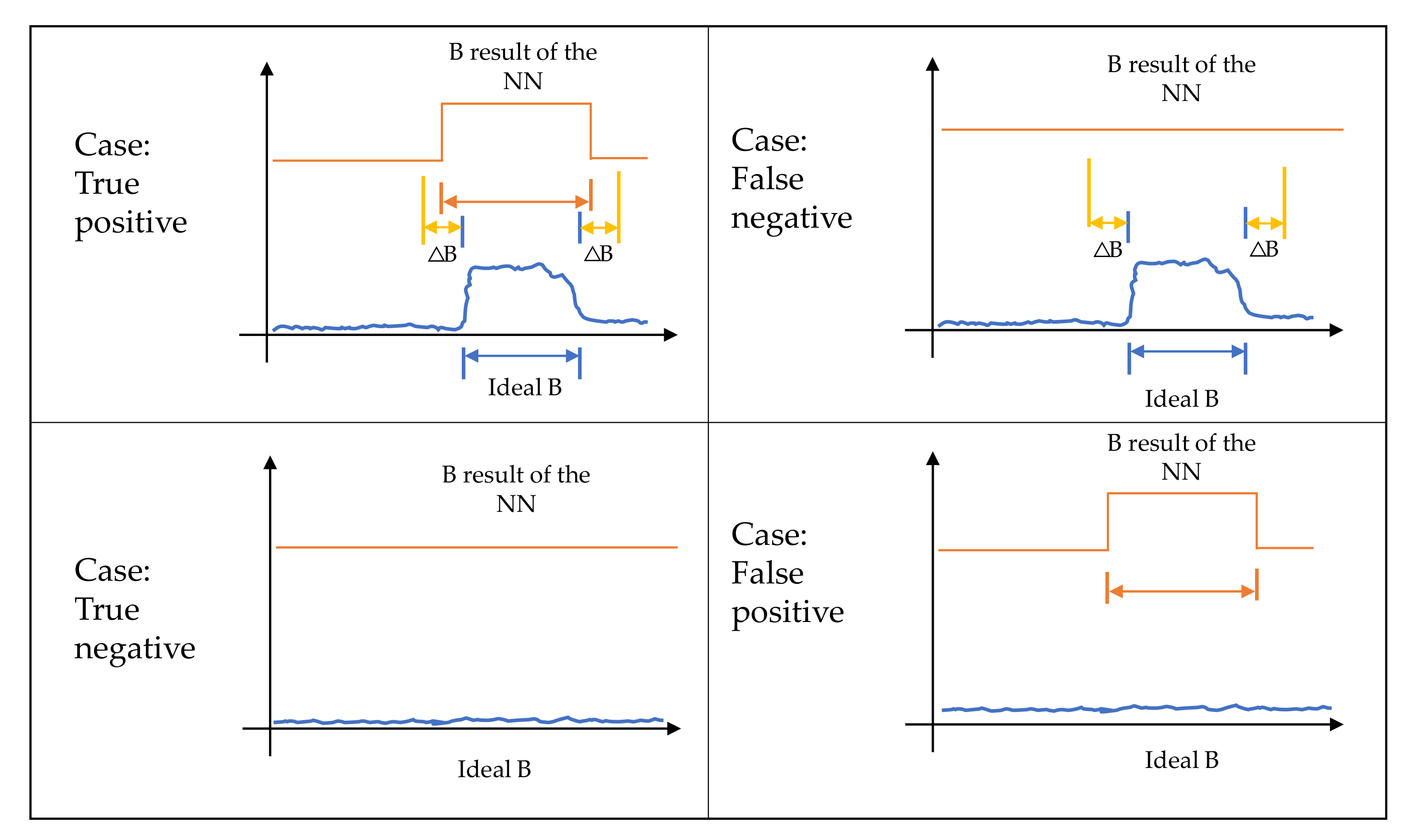
- A window corresponding to a PU transmission and classified as such by the SU is considered a true positive (TP) value;
- A frequency window corresponding to a PU transmission classified as noise by the SU is a false negative (FN) value;
- A window corresponding to noise classified by the SU as a PU transmission is a false positive (FP) value;
- A frequency window corresponding to noise classified by the SU as such is a true negative (TN) value.
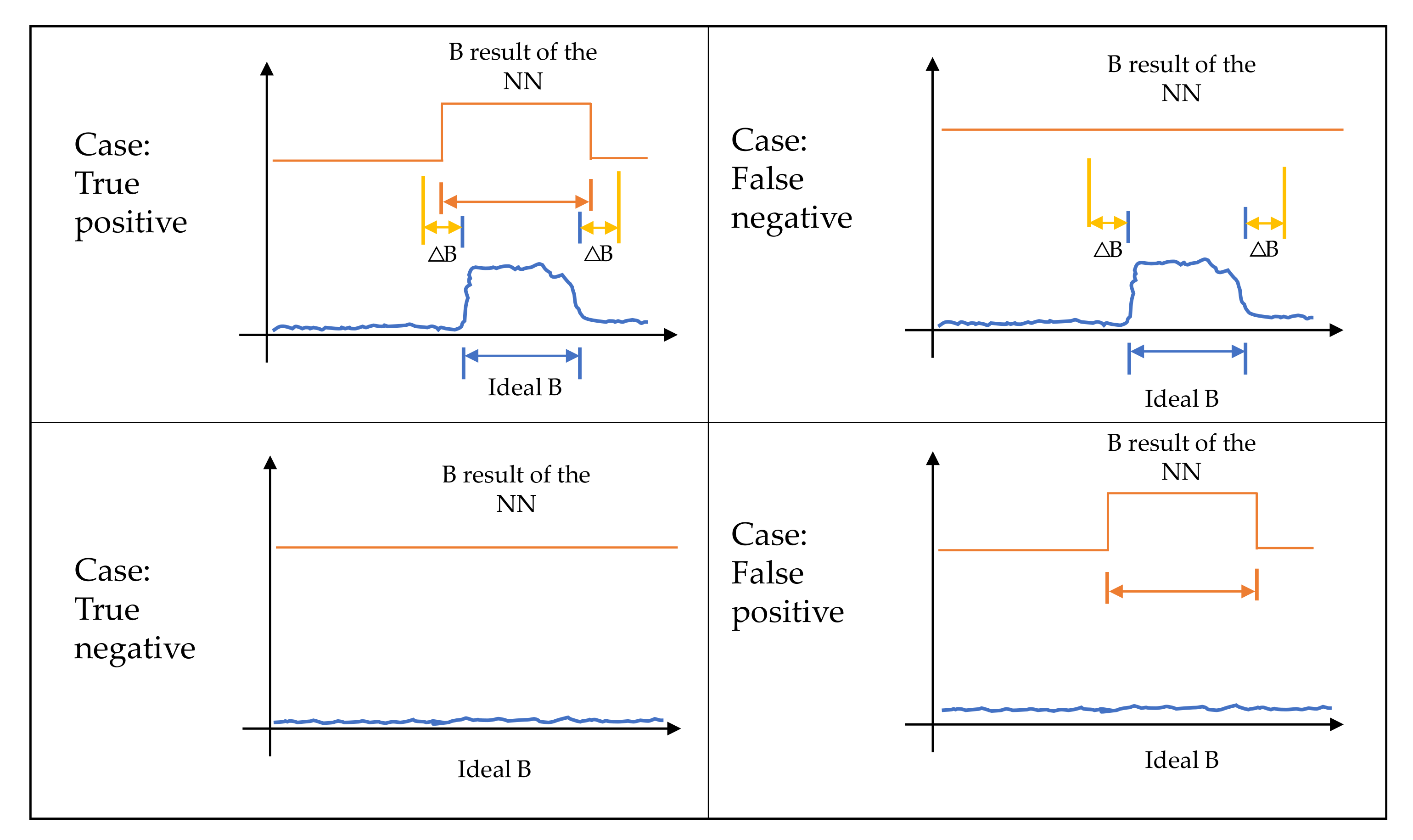
- The resulting matching the ideal bandwidth that corresponds to a transmission is a true positive (TP) case;
- The resulting corresponding to an ideal bandwidth close to zero is a true negative (TN) case;
- The resulting much greater than an ideal bandwidth that is close to zero is a false positive (FP) case;
- The resulting that should correspond to an ideal transmission but is a value close to zero will be a false negative (FN) case.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Cognitive radio | CR |
| Primary user | PU |
| Secondary user | SU |
| Spectrum sensing | SS |
| Multiband spectrum sensing | MBSS |
| Machine learning | ML |
| Software defined radio | SDR |
| Universal software radio peripheral | USRP |
| Radio environment map | REM |
| Cognitive radio network | CRN |
| Inverse Distance Weighting | IDW |
| Neural networks | NN |
| Multilayer perceptron | MLP |
| Multiresolution analysis | MRA |
| Rectified linear unit) | ReLU |
| Sample Entropy | SampEn |
| Power Spectrum Density | PSD |
| Step 1.1 | S 1.1 |
| Step 1.2 | S 1.2 |
| Step 1.3 | S 1.3 |
| Step 1.5 | S 1.5 |
| Step 1.6 | S 1.6 |
| Step 2.1 | S 2.1 |
| Step 2.2 | S 2.2 |
| Step 2.3 | S 2.3 |
| Step 2.5 | S 2.5 |
| Step 2.6 | S 2.6 |
| Bandwidth | B |
| Carrier frequency | Fc |
| Standard deviation | STD |
| F1 score | F1 |
| True positive | TP |
| False positive | FP |
| False negative | FN |
| True negative | TN |
References
- Mitola, J.; Maguire, G.Q. Cognitive radio: Making software radios more personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Lee, W.-Y.; Vuran, M.C.; Mohanty, S. NeXt generation/dynamic spectrum access/cognitive radio wireless networks: A survey. Comput. Netw. 2006, 50, 2127–2159. [Google Scholar] [CrossRef]
- Hattab, G.; Ibnkahla, M. Multiband Spectrum Access: Great Promises for Future Cognitive Radio Networks. Proc. IEEE 2014, 102, 282–306. [Google Scholar] [CrossRef]
- El-Khamy, S.E.; El-Mahallawy, M.S.; Youssef, E.S. Improved wideband spectrum sensing techniques using wavelet-based edge detection for cognitive radio. In Proceedings of the 2013 International Conference on Computing, Networking and Communications (ICNC), San Diego, CA, USA, 28–31 January 2013; pp. 418–423. [Google Scholar] [CrossRef]
- Kumar, A.; Saha, S.; Bhattacharya, R. Wavelet transform based novel edge detection algorithms for wideband spectrum sensing in CRNs. AEU-Int. J. Electron. Commun. 2018, 84, 100–110. [Google Scholar] [CrossRef]
- Diao, X.; Dong, Q.; Yang, Z.; Li, Y. Double-Threshold Cooperative Spectrum Sensing Algorithm Based on Sevcik Fractal Dimension. Algorithms 2017, 10, 96. [Google Scholar] [CrossRef]
- Popoola, J.J.; van Olst, R. Application of neural network for sensing primary radio signals in a cognitive radio environment. In Proceedings of the IEEE Africon ’11, Victoria Falls, Zambia, 13–15 September 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Shamsi, N.; Mousavinia, A.; Amirpour, H. A channel state prediction for multi-secondary users in a cognitive radio based on neural network. In Proceedings of the 2013 International Conference on Electronics, Computer and Computation (ICECCO), Ankara, Turkey, 7–9 November 2013; pp. 200–203. [Google Scholar] [CrossRef]
- Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R. A Novel Multiband Spectrum Sensing Method Based on Wavelets and the Higuchi Fractal Dimension. Sensors 2019, 19, 1322. [Google Scholar] [CrossRef] [PubMed]
- Zaidawi, D.J.; Sadkhan, S.B. Blind Spectrum Sensing Algorithms in CRNs: A Brief Overview. In Proceedings of the 2021 7th International Engineering Conference “Research & Innovation amid Global Pandemic” (IEC), Erbil, Iraq, 24–25 February 2021; pp. 78–83. [Google Scholar] [CrossRef]
- Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R. Real-Time Implementation of Multiband Spectrum Sensing Using SDR Technology. Sensors 2021, 21, 3506. [Google Scholar] [CrossRef] [PubMed]
- Politis, C.; Maleki, S.; Duncan, J.M.; Krivochiza, J.; Chatzinotas, S.; Ottesten, B. SDR Implementation of a Testbed for Real-Time Interference Detection with signal cancellation. IEEE Access 2018, 6, 20807–20821. [Google Scholar] [CrossRef]
- Stewart, R.W.; Crockett, L.; Atkinson, D.; Barlee, K.; Crawford, D.; Chalmers, I.; Mclernon, M.; Sozer, E. A low-cost desktop software defined radio design environment using MATLAB, simulink, and the RTL-SDR. IEEE Commun. Mag. 2015, 53, 64–71. [Google Scholar] [CrossRef]
- Hiari, O.; Mesleh, R. A Reconfigurable SDR Transmitter Platform Architecture for Space Modulation MIMO Techniques. IEEE Access 2017, 5, 24214–24228. [Google Scholar] [CrossRef]
- Santos-Luna, E.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R.; Ramos, V.; Lopez-Benitez, M.; Cardenas-Juarez, M. A Spectrum Analyzer Based on a Low-Cost Hardware-Software Integration. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; pp. 0607–0612. [Google Scholar] [CrossRef]
- Aghabeiki, S.; Hallet, C.; Noutehou, N.E.-R.; Rassem, N.; Adjali, I.; Mabrouk, M.B. Machine-learning-based spectrum sensing enhancement for software-defined radio applications. In Proceedings of the 2021 IEEE Cognitive Communications for Aerospace Applications Workshop (CCAAW), Cleveland, OH, USA, 21–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Selva, A.F.B.; Reis, A.L.G.; Lenzi, K.G.; Meloni, L.G.P.; Barbin, S.E. Introduction to the Software-defined Radio Approach. IEEE Lat. Am. Trans. 2012, 10, 1156–1161. [Google Scholar]
- About RTL-SDR, rtl-sdr.com, 11 de Abril de 2013. Available online: https://www.rtl-sdr.com/about-rtl-sdr/ (accessed on 8 August 2022).
- Koutlia, K.; Bojović, B.; Lagén, S.; Giupponi, L. Novel radio environment map for the ns-3 NR simulator. In Proceedings of the Workshop on ns-3, Virtual Event USA: ACM, New York, NY, USA, 23–24 June 2021; pp. 41–48. [Google Scholar] [CrossRef]
- Li, J.; Ding, G.; Zhang, X.; Wu, Q. Recent Advances in Radio Environment Map: A Survey. In Machine Learning and Intelligent Communications; Gu, X., Liu, G., Li, B., Eds.; En Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Springer International Publishing: Cham, Switzerland, 2018; Volume 226, pp. 247–257. [Google Scholar] [CrossRef]
- Spooner, C.M.; Khambekar, N.V. Spectrum sensing for cognitive radio: A signal-processing perspective on signal-statistics exploitation. In Proceedings of the 2012 International Conference on Computing, Networking and Communications (ICNC), Maui, HI, USA, 30 January–2 February 2012; pp. 563–568. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, Y.; Chen, H. Adaptive Compressed Wideband Spectrum Sensing Based on Radio Environment Map Dedicated for Space Information Networks. In Wireless and Satellite Systems; Jia, M., Guo, Q., Meng, W., Eds.; En Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Springer International Publishing: Cham, Switzerland, 2019; pp. 128–138. [Google Scholar] [CrossRef]
- Santana, Y.H.; Plets, D.; Alonso, R.M.; Nieto, G.G.; Martens, L.; Joseph, W. Radio Environment Map of an LTE Deployment Based on Machine Learning Estimation of Signal Levels. In Proceedings of the 2022 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Bilbao, Spain, 15–17 June 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Borisov, V.; Leemann, T.; Sessler, K.; Haug, J.; Pawelczyk, M.; Kasneci, G. Deep Neural Networks and Tabular Data: A Survey. IEEE Trans. Neural Netw. Learn. Syst. 2022. early access. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Yin, Z.; Zhao, Y.; Wu, Z. Cooperative Spectrum Sensing Based on Multi-Features Combination Network in Cognitive Radio Network. Entropy 2022, 24, 129. [Google Scholar] [CrossRef] [PubMed]
- Lam, N.S.-N. Spatial Interpolation Methods: A Review. Am. Cartogr. 1983, 10, 129–150. [Google Scholar] [CrossRef]
- Burrough, P.A.; McDonnell, R.; Burrough, P.A. Principles of Geographical Information System; en Spatial Information Systems; Oxford University Press: Oxford, UK, 1998. [Google Scholar]
- Harman, B.I.; Koseoglu, H.; Yigit, C.O. Performance evaluation of IDW, Kriging and multiquadric interpolation methods in producing noise mapping: A case study at the city of Isparta, Turkey. Appl. Acoust. 2016, 112, 147–157. [Google Scholar] [CrossRef]
- Arseni, M.; Voiculescu, M.; Georgescu, L.P.; Iticescu, C.; Rosu, A. Testing Different Interpolation Methods Based on Single Beam Echosounder River Surveying. Case Study: Siret River. ISPRS Int. J. Geo-Inf. 2019, 8, 507. [Google Scholar] [CrossRef]
- Matheron, G. Principles of geostatistics. Econ. Geol. 1963, 58, 1246–1266. [Google Scholar] [CrossRef]
- Oliver, M.A.; Webster, R. Kriging: A method of interpolation for geographical information systems. Int. J. Geogr. Inf. Syst. 1990, 4, 313–332. [Google Scholar] [CrossRef]
- Gundogdu, K.S.; Guney, I. Spatial analyses of groundwater levels using universal kriging. J. Earth Syst. Sci. 2007, 116, 49–55. [Google Scholar] [CrossRef]
- Cressie, N.A.C. Statistics for Spatial Data, Revised ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]
- Isaaks, E.H.; Srivastava, R.M. Applied Geostatistics; Oxford University Press: New York, NY, USA, 1989. [Google Scholar]
- Han, J.; Kamber, M. Data Mining: Concepts and Techniques, 3rd ed.; Elsevier: Burlington, MA, USA, 2012. [Google Scholar]
- Wang, W.; Yang, Y. Development of convolutional neural network and its application in image classification: A survey. Opt. Eng. 2019, 58, 1. [Google Scholar] [CrossRef]
- Haykin, S.S.; Haykin, S.S. Neural Networks and Learning Machines, 3rd ed.; Prentice Hall: New York, NY, USA, 2009. [Google Scholar]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed]
- Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R. Multiband Spectrum Sensing Based on the Sample Entropy. Entropy 2022, 24, 411. [Google Scholar] [CrossRef] [PubMed]
- Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R.; Ruiz-Boqué, S. Machine Learning Techniques Applied to Multiband Spectrum Sensing in Cognitive Radios. Sensors 2019, 19, 4715. [Google Scholar] [CrossRef]
- Nooelec-Nooelec NESDR SMArt v4 SDR-Premium RTL-SDR w/Aluminum Enclosure, 0.5PPM TCXO, SMA Input. RTL2832U & R820T2-Based-Software Defined Radio. Available online: https://www.nooelec.com/store/sdr/nesdr-smart-sdr.html (accessed on 8 March 2021).
- HackRF One-Great Scott Gadgets, 8 de Marzo de 2021. Available online: https://greatscottgadgets.com/hackrf/one/ (accessed on 8 March 2021).
- LimeSDR Mini is a $135 Open Source Hardware, Full Duplex USB SDR Board (Crowdfunding)-CNX Software, CNX Software -Embedded Systems News, 18 de Septiembre de 2017. Available online: https://www.cnx-software.com/2017/09/18/limesdr-mini-is-a-135-open-source-hardware-full-duplex-usb-sdr-board-crowdfunding/ (accessed on 13 March 2022).
- Welch, P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Jain, A.K. Data clustering: 50 years beyond K-means. Pattern Recognit. Lett. 2010, 31, 651–666. [Google Scholar] [CrossRef]
- Sasaki, Y. The Truth of the F-Measure, oct. 2007 [En Línea]. Available online: https://www.cs.odu.edu/~mukka/cs795sum11dm/Lecturenotes/Day3/F-measure-YS-26Oct07.pdf (accessed on 7 April 2007).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Previous Work. | Contributions |
|---|---|
| “A Novel Multiband Spectrum Sensing Method Based on Wavelets and the Higuchi Fractal Dimension” [9]. |
|
| “Multiband Spectrum Sensing Based on the Sample Entropy” [40]. |
|
| “Real-Time Implementation of Multiband Spectrum Sensing Using SDR Technology” [11]. |
|
| “Machine Learning Techniques Applied to Multiband Spectrum Sensing in Cognitive Radios” [41]. |
|
| Label | Device | Bandwidth (MHz) | Location Coordinate (X,Y) (m) | ||
|---|---|---|---|---|---|
| PU1 | Mini LimeSDR | 699.5 | - | 0.5 | (0, 0) |
| PU2 | HackRF ONE | 700.5 | - | 1 | (0, 0) |
| SU1 | RTL-SDR | - | 700 | 2.4 | (−1.5, 0) |
| SU2 | RTL-SDR | - | 700 | 2.4 | (0, 1.5) |
| SU3 | RTL-SDR | - | 700 | 2.4 | (1.5, 0) |
| SU4 | RTL-SDR | - | 700 | 2.4 | (0, −1.5) |
| SU5 | RTL-SDR | - | 700 | 2.4 | (−3, 2) |
| SU6 | RTL-SDR | - | 700 | 2.4 | (3, 3.5) |
| SU7 | RTL-SDR | - | 700 | 2.4 | (3, −2.5) |
| SU8 | RTL-SDR | - | 700 | 2.4 | (−3, −2.5) |
| (a) | Neurons | |||
| 16 | 32 | 64 | ||
| Layers | 1 | 2 | 10 | 60 |
| 2 | 10 | 25 | 180 | |
| 3 | 120 | 192 | 1500 | |
| 4 | 162 | 600 | 3984 | |
| Training Time [min] | ||||
| (b) | Neurons | |||
| 16 | 32 | 64 | ||
| Layers | 1 | 2 | 6 | 16 |
| 2 | 8 | 33 | 290 | |
| 3 | 15 | 80 | 850 | |
| 4 | 20 | 129 | 7610 | |
| Training Time [min] | ||||
| (c) | Neurons | |||
| 16 | 32 | 64 | ||
| Layers | 1 | 2 | 5 | 16 |
| 2 | 5 | 19 | 280 | |
| 3 | 11 | 75 | 875 | |
| 4 | 21 | 145 | 3628 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R.; Lopez-Benitez, M. Cooperative Multiband Spectrum Sensing Using Radio Environment Maps and Neural Networks. Sensors 2023, 23, 5209. https://doi.org/10.3390/s23115209
Molina-Tenorio Y, Prieto-Guerrero A, Aguilar-Gonzalez R, Lopez-Benitez M. Cooperative Multiband Spectrum Sensing Using Radio Environment Maps and Neural Networks. Sensors. 2023; 23(11):5209. https://doi.org/10.3390/s23115209
Chicago/Turabian StyleMolina-Tenorio, Yanqueleth, Alfonso Prieto-Guerrero, Rafael Aguilar-Gonzalez, and Miguel Lopez-Benitez. 2023. "Cooperative Multiband Spectrum Sensing Using Radio Environment Maps and Neural Networks" Sensors 23, no. 11: 5209. https://doi.org/10.3390/s23115209
APA StyleMolina-Tenorio, Y., Prieto-Guerrero, A., Aguilar-Gonzalez, R., & Lopez-Benitez, M. (2023). Cooperative Multiband Spectrum Sensing Using Radio Environment Maps and Neural Networks. Sensors, 23(11), 5209. https://doi.org/10.3390/s23115209