

Real-Time Seismic Intensity Measurements Prediction for Earthquake Early Warning: A Systematic Literature Review

Abstract
1. Introduction
2. Theoretical Study on the Evolution of Earthquake Rupture
3. Network-Based Earthquake Early Warning
3.1. Source Estimation Method
3.2. Ground Motion Model Based on M, R, VS30 with Shakemap
3.3. Country-Specific Examples
4. On-Site Warning Method of Earthquake Early Warning
4.1. P Wave Parameters
4.2. Correlation between P Wave Warning Parameters and Ground Motion Model
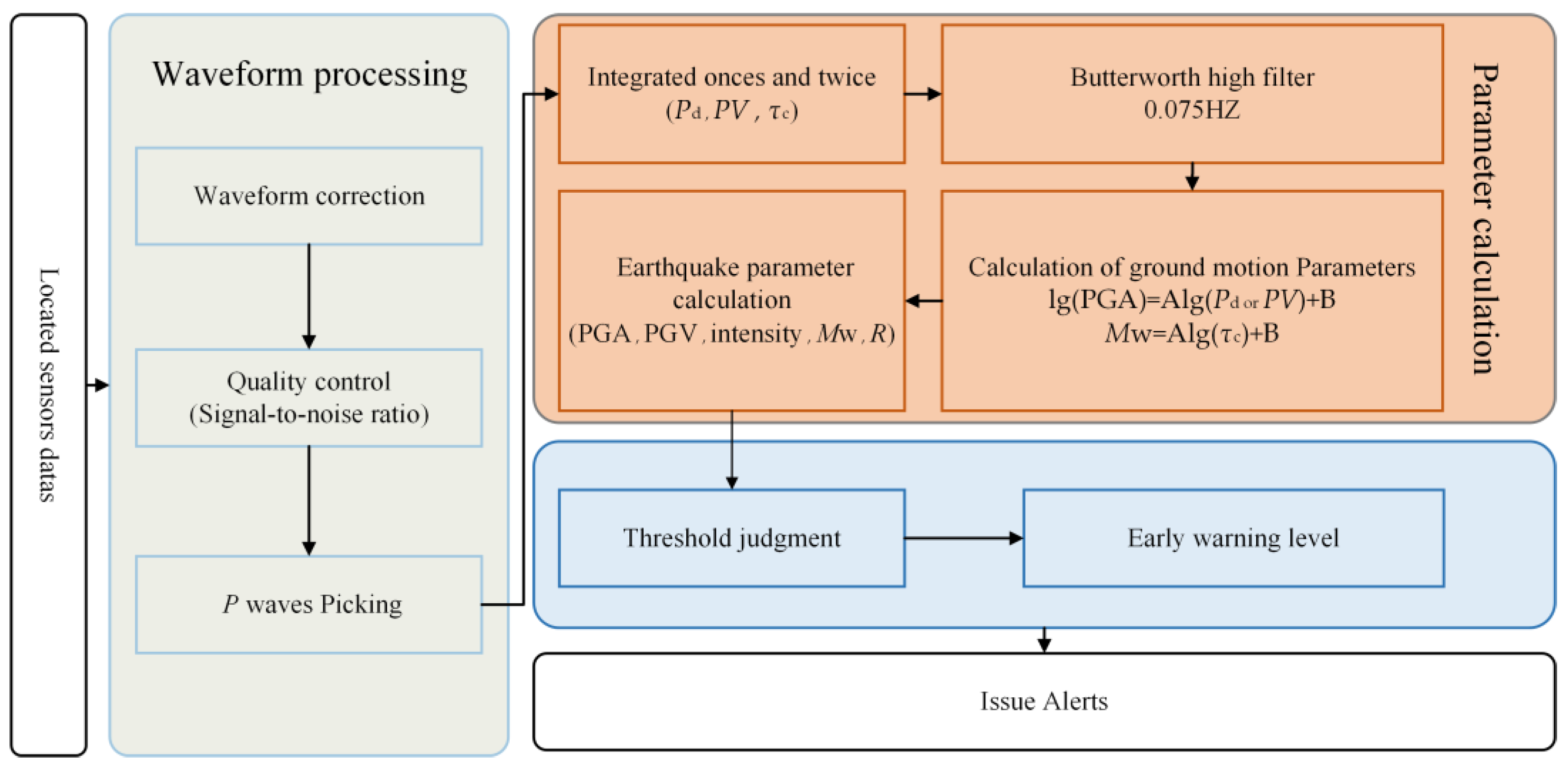
- Waveform processing: when an earthquake is detected, remove the mean value and linear trend of the waveform and pick up the P waveform. Calculate the signal-to-noise ratio to eliminate data that may be contaminated by the noise for data quality control;
- P wave parameter calculation: integrate the accelerometer records once and twice to obtain the Pv and Pd records; filter them with a Butterworth high-pass filter with a cutoff frequency of 0.075 Hz to remove the low-frequency drift after the second integration; and obtain the Pd, Pv, τc and other parameters in the 3 s time window after the arrival of the P wave;
- Threshold setting: there is a good correlation between the seismic intensity parameter IMM and peak velocity and the early P wave peak displacement and IM parameter PGV [59]. By converting the intensity to the PGV, the threshold value of Pd is calculated by determining the empirical correlation between the Pd and PGV. Similarly, the threshold value of τc is determined by the correlation between τc and magnitude. For example, the Pd threshold and τc threshold are set to 0.2 cm and 0.6 s, respectively, for an earthquake with M > 6 and IMM ≥ 7 [15].
- Issue alert: judge whether the IM parameters exceed the set threshold, calculate the intensity level, determine the warning level and release the warning information.

4.3. Ground Motion Model Based on Artificial Intelligence Technology
5. Intensity Measurements Estimation Based on Finite Fault Model
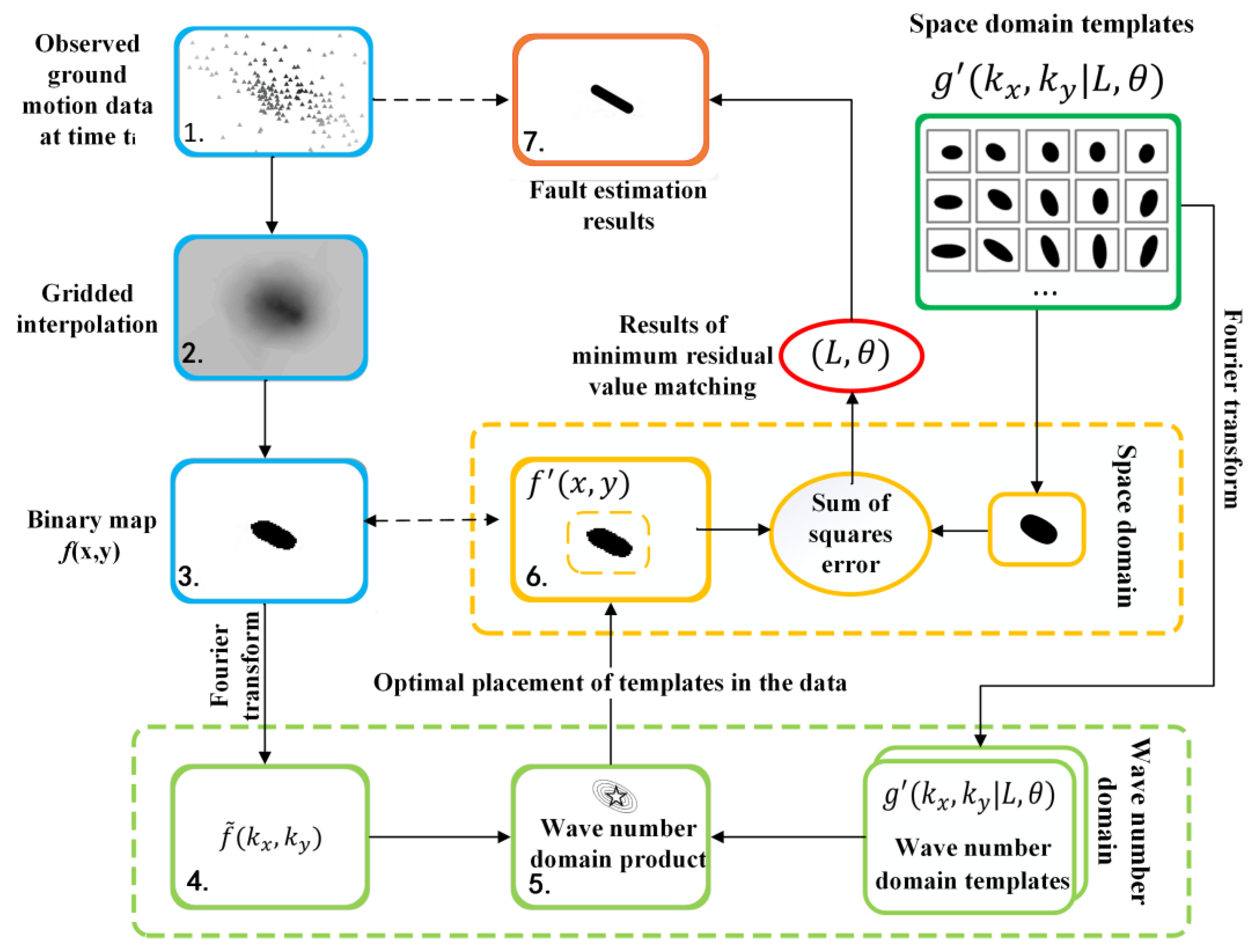
Intensity Measurements Estimation Based on Finite Fault Template Matching
6. Intensity Measurements Prediction Based on Simulated Seismic Wave Fields
6.1. Numerical Shake Prediction for EEWS
6.2. Intensity Measurements Prediction Based on Propagation of Local Undamped Motion
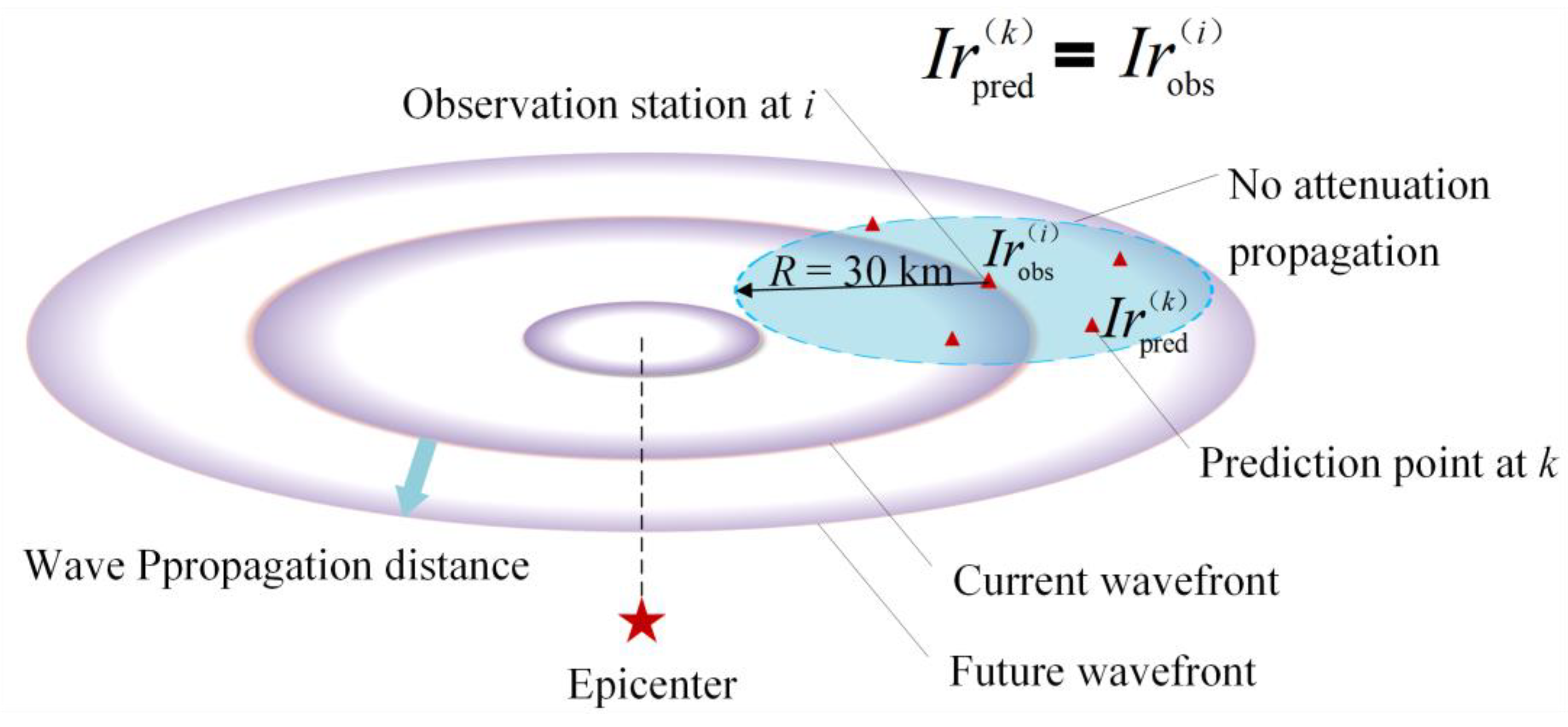
6.2.1. Principle of PLUM Method

6.2.2. Improvement and Testing of the PLUM Method
- Grid definition: each station is connected to its six neighboring stations regardless of spacing. When a station monitors motion above the threshold, it sends its maximum predicted value to the surrounding six stations;
- Intensity modification: the intensity is changed to , and is calculated from the PGA and PGV;
- Dual station triggering algorithm: when both adjacent stations trigger the threshold, the station whose maximum value of ground vibration is triggered satisfies the primary threshold, and the adjacent triggered station meets the secondary threshold to solve the noise-spike false-alarm problem.
7. Intensity Measurements Evaluation Methodology
7.1. Evaluation of Intensity Measurements Accuracy Based on Different Algorithms
7.2. Impact of Alert Costs on the Intensity Measurements Accuracy
8. Discussion
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Allen, R.M.; Melgar, D. Earthquake early warning: Advances, scientific challenges, and societal needs. Annu. Rev. Earth Planet. Sci. 2019, 47, 361–388. [Google Scholar] [CrossRef]
- Cremen, G.; Galasso, C. Earthquake early warning: Recent advances and perspectives. Earth Sci. Rev. 2020, 205, 103184. [Google Scholar] [CrossRef]
- Allen, R.M.; Stogaitis, M. Global growth of earthquake early warning. Science 2022, 375, 717–718. [Google Scholar] [CrossRef] [PubMed]
- Yamamoto, S.; Tomori, M. Earthquake early warning system for railways and its performance. J. JSCE 2013, 1, 322–328. [Google Scholar] [CrossRef] [PubMed]
- Suárez, G. The seismic early warning system of Mexico (SASMEX): A retrospective view and future challenges. Front. Earth Sci. 2022, 10, 196. [Google Scholar] [CrossRef]
- Kodera, Y.; Hayashimoto, N.; Tamaribuchi, K.; Noguchi, K.; Moriwaki, K.; Takahashi, R.; Morimoto, M.; Okamoto, K.; Hoshiba, M. Developments of the nationwide earthquake early warning system in Japan after the 2011 M w 9.0 Tohoku-Oki earthquake. Front. Earth Sci. 2021, 9, 726045. [Google Scholar] [CrossRef]
- Wu, Y.M.; Mittal, H.; Chen, D.-Y.; Hsu, T.Y.; Lin, P.Y. Earthquake early warning systems in Taiwan: Current status. J. Geol. Soc. India 2021, 97, 1525–1532. [Google Scholar] [CrossRef]
- Sheen, D.H.; Park, J.H.; Chi, H.C.; Hwang, E.H.; Lim, I.S.; Seong, Y.J.; Pak, J. The first stage of an earthquake early warning system in South Korea. Seismol. Res. Lett. 2017, 88, 1491–1498. [Google Scholar] [CrossRef]
- Goltz, J.D.; Wald, D.J.; McBride, S.K.; DeGroot, R.; Breeden, J.K.; Bostrom, A. Development of a companion questionnaire for “Did You Feel It?”: Assessing response in earthquakes where an earthquake early warning may have been received. Earthq. Spectra 2023, 39, 434–453. [Google Scholar] [CrossRef]
- Kumar, R.; Mittal, H.; Sharma, B. Earthquake Genesis and Earthquake Early Warning Systems: Challenges and a Way Forward. Surv. Geophys. 2022, 43, 1143–1168. [Google Scholar] [CrossRef]
- Chamoli, B.P.; Kumar, A.; Chen, D.Y.; Gairola, A.; Jakka, R.S.; Pandey, B.; Kumar, P.; Rathore, G. A prototype earthquake early warning system for northern India. J. Earthq. Eng. 2021, 25, 2455–2473. [Google Scholar] [CrossRef]
- Cremen, G.; Galasso, C.; Zuccolo, E. Investigating the potential effectiveness of earthquake early warning across Europe. Nat. Commun. 2022, 13, 639. [Google Scholar] [CrossRef]
- Bracale, M.; Colombelli, S.; Elia, L.; Karakostas, V.; Zollo, A. Design, implementation and testing of a network-based Earthquake Early Warning System in Greece. Front. Earth Sci. 2021, 9, 667160. [Google Scholar] [CrossRef]
- Peng, C.; Jiang, P.; Ma, Q.; Su, J.; Cai, Y.; Zheng, Y. Chinese Nationwide Earthquake Early Warning System and Its Performance in the 2022 Lushan M6.1 Earthquake. Remote Sens. 2022, 14, 4269. [Google Scholar] [CrossRef]
- Zollo, A.; Amoroso, O.; Lancieri, M.; Wu, Y.M.; Kanamori, H. A threshold-based earthquake early warning using dense accelerometer networks. Geophys. J. Int. 2010, 183, 963–974. [Google Scholar] [CrossRef]
- Satriano, C.; Wu, Y.M.; Zollo, A.; Kanamori, H. Earthquake early warning: Concepts, methods and physical grounds. Soil Dyn. Earthq. Eng. 2011, 31, 106–118. [Google Scholar] [CrossRef]
- Hoshiba, M.; Iwakiri, K.; Hayashimoto, N.; Shimoyama, T.; Hirano, K.; Yamada, Y.; Ishigaki, Y.; Kikuta, H. Outline of the 2011 off the Pacific coast of Tohoku earthquake (Mw 9.0)—Earthquake early warning and observed seismic intensity. Earth Planets Space 2011, 63, 547–551. [Google Scholar] [CrossRef]
- Hoshiba, M.; Ozaki, T. Earthquake Early Warning and Tsunami Warning of the Japan Meteorological Agency, and Their Performance in the 2011 off the Pacific Coast of Tohoku Earthquake (9.0). In Early Warning for Geological Disasters: Scientific Methods and Current Practice; Friedemann, W., Jochen, Z., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 1–28. ISBN 978-3-642-12233-0. [Google Scholar]
- Aoi, S.; Asano, Y.; Kunugi, T.; Kimura, T.; Uehira, K.; Takahashi, N.; Ueda, H.; Shiomi, K.; Matsumoto, T.; Fujiwara, H. MOWLAS: NIED observation network for earthquake, tsunami and volcano. Earth Planets Space 2020, 72, 1–31. [Google Scholar] [CrossRef]
- Böse, M.; Smith, D.E.; Felizardo, C.; Meier, M.A.; Heaton, T.H.; Clinton, J.F. FinDer v.2: Improved real-time ground-motion predictions for M2–M9 with seismic finite-source characterization. Geophys. J. Int. 2018, 212, 725–742. [Google Scholar] [CrossRef]
- Kodera, Y.; Yamada, Y.; Hirano, K.; Tamaribuchi, K.; Adachi, S.; Hayashimoto, N.; Morimoto, M.; Nakamura, M.; Hoshiba, M. The Propagation of Local Undamped Motion (PLUM) Method: A Simple and Robust Seismic Wavefield Estimation Approach for Earthquake Early Warning. Bull. Seismol. Soc. Am. 2018, 108, 983–1003. [Google Scholar] [CrossRef]
- Rafiei, M.H.; Adeli, H. NEEWS: A novel earthquake early warning model using neural dynamic classification and neural dynamic optimization. Soil Dyn. Earthq. Eng. 2017, 100, 417–427. [Google Scholar] [CrossRef]
- Chiang, Y.J.; Chin, T.L.; Chen, D.Y. Neural Network-Based Strong Motion Prediction for On-Site Earthquake Early Warning. Sensors 2022, 22, 704. [Google Scholar] [CrossRef] [PubMed]
- Song, J.; Zhu, J.; Wang, Y.; Li, S. On-site alert-level earthquake early warning using machine-learning-based prediction equations. Geophys. J. Int. 2022, 231, 786–800. [Google Scholar] [CrossRef]
- Olson, E.L.; Allen, R.M. The deterministic nature of earthquake rupture. Nature 2005, 438, 212–215. [Google Scholar] [CrossRef] [PubMed]
- Böse, M.; Hauksson, E.; Solanki, K.; Kanamori, H.; Heaton, T.H. Real-time testing of the on-site warning algorithm in southern California and its performance during the July 29 2008 Mw5.4 Chino Hills earthquake. Geophys. Res. Lett. 2009, 36, L00B03. [Google Scholar] [CrossRef]
- Colombelli, S.; Zollo, A.; Festa, G.; Picozzi, M. Evidence for a difference in rupture initiation between small and large earthquakes. Nat. Commun. 2014, 5, 4958. [Google Scholar] [CrossRef]
- Colombelli, S.; Festa, G.; Zollo, A. Early rupture signals predict the final earthquake size. Geophys. J. Int. 2020, 223, 692–706. [Google Scholar] [CrossRef]
- Rydelek, P.; Horiuchi, S. Is earthquake rupture deterministic? Nature 2006, 442, E5–E6. [Google Scholar] [CrossRef]
- Meier, M.A.; Heaton, T.; Clinton, J. Evidence for universal earthquake rupture initiation behavior. Geophys. Res. Lett. 2016, 43, 7991–7996. [Google Scholar] [CrossRef]
- Trugman, D.T.; Page, M.T.; Minson, S.E.; Cochran, E.S. Peak Ground Displacement Saturates Exactly When Expected: Implications for Earthquake Early Warning. J. Geophys. Res. Solid Earth 2019, 124, 4642–4653. [Google Scholar] [CrossRef]
- Melgar, D.; Hayes, G.P. Systematic Observations of the Slip Pulse Properties of Large Earthquake Ruptures. Geophys. Res. Lett. 2017, 44, 9691–9698. [Google Scholar] [CrossRef]
- Goldberg, D.E.; Melgar, D.; Bock, Y.; Allen, R.M. Geodetic Observations of Weak Determinism in Rupture Evolution of Large Earthquakes. J. Geophys. Res. Solid Earth 2018, 123, 9950–9962. [Google Scholar] [CrossRef]
- Meier, M.A.; Ampuero, J.; Heaton, T.H. The hidden simplicity of subduction megathrust earthquakes. Science 2017, 357, 1277–1281. [Google Scholar] [CrossRef]
- Zollo, A.; Lancieri, M.; Nielsen, S. Earthquake magnitude estimation from peak amplitudes of very early seismic signals on strong motion records. Geophys. Res. Lett. 2006, 33, L23312. [Google Scholar] [CrossRef]
- Hutchison, A.A.; Böse, M.; Manighetti, I. Improving Early Estimates of Large Earthquake’s Final Fault Lengths and Magnitudes Leveraging Source Fault Structural Maturity Information. Geophys. Res. Lett. 2020, 47, e2020GL087539. [Google Scholar] [CrossRef]
- Melgar, D.; Bock, Y.; Sanchez, D.; Crowell, B.W. On robust and reliable automated baseline corrections for strong motion seismology. J. Geophys. Res. Solid Earth 2013, 118, 1177–1187. [Google Scholar] [CrossRef]
- Wu, Y.M.; Zhao, L. Magnitude estimation using the first three seconds P-wave amplitude in earthquake early warning. Geophys. Res. Lett. 2006, 33, e2006GL026871. [Google Scholar] [CrossRef]
- Nakamura, Y. On the urgent earthquake detection and alarm system (UrEDAS). In Proceedings of the Ninth World Conference on Earthquake Engineering, Tokyo-Kyoto, Japan, 2–9 August 1988; pp. 673–678. [Google Scholar]
- Huang, P.L.; Lin, T.L.; Wu, Y.M. Application of τc* Pd in earthquake early warning. Geophys. Res. Lett. 2015, 42, 1403–1410. [Google Scholar] [CrossRef]
- Cua, G.; Heaton, T. The Virtual Seismologist (VS) method: A Bayesian approach to earthquake early warning. In Earthquake Early Warning Systems; Paolo, G., Gaetano, M., Jochen, Z., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; ISBN 978-3-540-72241-0. [Google Scholar]
- Mousavi, S.M.; Ellsworth, W.L.; Zhu, W.; Chuang, L.Y.; Beroza, G.C. Earthquake transformer—An attentive deep-learning model for simultaneous earthquake detection and phase picking. Nat. Commun. 2020, 11, 3952. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, M.; Tian, X. Real-time earthquake early warning with deep learning: Application to the 2016 M 6.0 Central Apennines, Italy earthquake. Geophys. Res. Lett. 2021, 48, e2020GL089394. [Google Scholar] [CrossRef]
- Chiou, B.; Darragh, R.; Gregor, N.; Silva, W. NGA project strong-motion database. Earthq. Spectra 2008, 24, 23–44. [Google Scholar] [CrossRef]
- Abrahamson, N.; Silva, W. Summary of the Abrahamson & Silva NGA ground-motion relations. Earthq. Spectra 2008, 24, 67–97. [Google Scholar] [CrossRef]
- Goulet, C.A.; Kishida, T.; Ancheta, T.D.; Cramer, C.H.; Darragh, R.B.; Silva, W.J.; Hashash, Y.M.; Harmon, J.; Parker, G.A.; Stewart, J.P.; et al. PEER NGA-east database. Earthq. Spectra 2021, 37, 1331–1353. [Google Scholar] [CrossRef]
- Mazzoni, S.; Kishida, T.; Stewart, J.P.; Contreras, V.; Darragh, R.B.; Ancheta, T.D.; Ancheta, T.D.; Chiou, B.S.; Silva, W.J.; Bozorgnia, Y. Relational database used for ground-motion model development in the NGA-Sub project. Earthq. Spectra 2022, 38, 1529–1548. [Google Scholar] [CrossRef]
- Parker, G.A.; Stewart, J.P.; Boore, D.M.; Atkinson, G.M.; Hassani, B. NGA-subduction global ground motion models with regional adjustment factors. Earthq. Spectra 2022, 38, 456–493. [Google Scholar] [CrossRef]
- Kuyuk, H.S.; Allen, R.M. Optimal seismic network density for earthquake early warning: A case study from California. Seismol. Res. Lett. 2013, 84, 946–954. [Google Scholar] [CrossRef]
- Kuyuk, H.S.; Allen, R.M.; Brown, H.; Hellweg, M.; Henson, I.; Neuhauser, D. Designing a network-based earthquake early warning algorithm for California: ElarmS-2. Bull. Seismol. Soc. Am. 2014, 104, 162–173. [Google Scholar] [CrossRef]
- Chung, A.I.; Henson, I.; Allen, R.M. Optimizing Earthquake Early Warning Performance: ElarmS-3. Seismol. Res. Lett. 2019, 90, 727–743. [Google Scholar] [CrossRef]
- Thakoor, K.; Andrews, J.; Hauksson, E.; Heaton, T. From earthquake source parameters to ground-motion warnings near you: The ShakeAlert earthquake information to ground-motion (eqInfo2GM) method. Seismol. Res. Lett. 2019, 90, 1243–1257. [Google Scholar] [CrossRef]
- Caruso, A.; Colombelli, S.; Elia, L.; Picozzi, M.; Zollo, A. An on-site alert level early warning system for Italy. J. Geophys. Res. Solid Earth 2017, 122, 2106–2118. [Google Scholar] [CrossRef]
- Wurman, G.; Allen, R.M.; Lombard, P. Toward earthquake early warning in northern California. Geophys. Res. Solid Earth 2007, 112, B08311. [Google Scholar] [CrossRef]
- Odaka, T.; Ashiya, K.; Tsukada, S.Y.; Sato, S.; Ohtake, K.; Nozaka, D. A new method of quickly estimating epicentral distance and magnitude from a single seismic record. Bull. Seismol. Soc. Am. 2003, 93, 526–532. [Google Scholar] [CrossRef]
- Festa, G.; Zollo, A.; Lancieri, M. Earthquake magnitude estimation from early radiated energy. Geophys. Res. Lett. 2008, 35, L22307. [Google Scholar] [CrossRef]
- Alcik, H.; Ozel, O.; Apaydin, N.; Erdik, M. A study on warning algorithms for Istanbul earthquake early warning system. Geophys. Res. Lett. 2009, 36, L00B05. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, B. A new M w estimation parameter for use in earthquake early warning systems. J. Seismol. 2018, 22, 325–335. [Google Scholar] [CrossRef]
- Wu, Y.M.; Kanamori, H. Rapid assessment of damage potential of earthquakes in Taiwan from the beginning of P waves. Bull. Seismol. Soc. Am. 2005, 95, 1181–1185. [Google Scholar] [CrossRef]
- Peng, C.; Yang, J.; Chen, Y.; Zhu, X.; Xu, Z.; Zheng, Y.; Jiang, X. Application of a Threshold-Based Earthquake Early Warning Method to the Mw 6.6 Lushan Earthquake, Sichuan, China. Seismol. Res. Lett. 2015, 86, 841–847. [Google Scholar] [CrossRef]
- Colombelli, S.; Zollo, A. Fast determination of earthquake magnitude and fault extent from real-timeP-wave recordings. Geophys. J. Int. 2015, 202, 1158–1163. [Google Scholar] [CrossRef]
- Song, J.; Li, S.; Wang, Y.; Bai, L. Application of a threshold-based earthquake early warning to ltaly Mw 6.2 earthquake on 24 August 2016. Earthq. Eng. Eng. dyn. 2017, 37, 15–22. (In Chinese) [Google Scholar]
- Wang, Y.; Li, S.; Song, J. Threshold-based evolutionary magnitude estimation for an earthquake early warning system in the Sichuan-Yunnan region, China. Sci. Rep. 2020, 10, 1–12. [Google Scholar] [CrossRef]
- Colombelli, S.; Caruso, A.; Zollo, A.; Festa, G.; Kanamori, H. A P wave-based, on-site method for earthquake early warning. Geophys. Res. Lett. 2015, 42, 1390–1398. [Google Scholar] [CrossRef]
- Meier, M.A.; Heaton, T.; Clinton, J. The Gutenberg algorithm: Evolutionary Bayesian magnitude estimates for earthquake early warning with a filter bank. Bull. Seismol. Soc. Am. 2015, 105, 2774–2786. [Google Scholar] [CrossRef]
- Peng, C.; Jiang, P.; Ma, Q.; Wu, P.; Su, J.; Zheng, Y.; Yang, J. Performance Evaluation of an Earthquake Early Warning System in the 2019–2020 M6.0 Changning, Sichuan, China, Seismic Sequence. Front. Earth Sci. 2021, 9, 699941. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, B. Applicability of Accurate Ground Motion Estimation Using Initial P Wave for Earthquake Early Warning. Front. Earth Sci. 2021, 9, 718216. [Google Scholar] [CrossRef]
- Hsu, T.Y.; Huang, S.K.; Chang, Y.W.; Kuo, C.H.; Lin, C.M.; Chang, T.M.; Wen, K.L.; Loh, C.H. Rapid on-site peak ground acceleration estimation based on support vector regression and P-wave features in Taiwan. Soil Dyn. Earthq. Eng. 2013, 49, 210–217. [Google Scholar] [CrossRef]
- Song, J.; Yu, C.; Li, S. Continuous prediction of onsite PGV for earthquake early warning basedon least squares support vector machine. Chin. J. Geophys. 2021, 64, 555–568. [Google Scholar] [CrossRef]
- Hsu, T.Y.; Wu, R.T.; Liang, C.W.; Kuo, C.H.; Lin, C.M. Peak ground acceleration estimation using P-wave parameters and horizontal-to-vertical spectral ratios. Terrest. Atmos. Ocean. Sci. 2020, 31, 1–8. [Google Scholar] [CrossRef]
- Hsu, T.Y.; Huang, C.W. Onsite Early Prediction of PGA Using CNN With Multi-Scale and Multi-Domain P-Waves as Input. Front. Earth Sci. 2021, 9, 626908. [Google Scholar] [CrossRef]
- Jozinović, D.; Lomax, A.; Štajduhar, I.; Michelini, A. Rapid prediction of earthquake ground shaking intensity using raw waveform data and a convolutional neural network. Geophys. J. Int. 2020, 222, 1379–1389. [Google Scholar] [CrossRef]
- Jozinović, D.; Lomax, A.; Štajduhar, I.; Michelini, A. Transfer learning: Improving neural network based prediction of earthquake ground shaking for an area with insufficient training data. Geophys. J. Int. 2022, 229, 704–718. [Google Scholar] [CrossRef]
- Brown, H.M.; Allen, R.M.; Grasso, V.F. Testing elarms in Japan. Seismol. Res. Lett. 2009, 80, 727–739. [Google Scholar] [CrossRef]
- Kurahashi, S.; Irikura, K. Source model for generating strong ground motions during the 2011 off the Pacific coast of Tohoku Earthquake. Earth Planets Space 2011, 63, 571–576. [Google Scholar] [CrossRef]
- Böse, M.; Heaton, T.H.; Hauksson, E. Real-time finite fault rupture detector (FinDer) for large earthquakes. Geophys. J. Int. 2012, 191, 803–812. [Google Scholar] [CrossRef]
- Lu, J.; Li, S. Detailed analysis and preliminary performance evaluation of the FinDer: A real-time finite faultrupture detector for earthquake early warning. World Earthq. Eng. 2021, 37, 152–164. (In Chinese) [Google Scholar]
- Li, J.; Böse, M.; Feng, Y.; Yang, C. Real-Time Characterization of Finite Rupture and Its Implication for Earthquake Early Warning: Application of FinDer to Existing and Planned Stations in Southwest China. Front. Earth Sci. 2021, 9, 699560. [Google Scholar] [CrossRef]
- Böse, M.; Felizardo, C.; Heaton, T.H. Finite-Fault Rupture Detector (FinDer): Going Real-Time in Californian ShakeAlert Warning System. Seismol. Res. Lett. 2015, 86, 1692–1704. [Google Scholar] [CrossRef]
- Böse, M.; Hutchison, A.A.; Manighetti, I.; Li, J.; Massin, F.; Clinton, J.F. FinDerS(+): Real-Time Earthquake Slip Profiles and Magnitudes Estimated from Back projected Displacement with Consideration of Fault Source Maturity Gradient. Front. Earth Sci. 2021, 9, 685879. [Google Scholar] [CrossRef]
- Hoshiba, M. Real-time prediction of impending ground shaking: Review of wavefield-based (Ground-Motion-Based) method for earthquake early warning. Front. Earth. Sci. 2021, 9, 722784. [Google Scholar] [CrossRef]
- Hoshiba, M. Real-time prediction of ground motion by Kirchhoff-Fresnel boundary integral equation method: Extended front detection method for Earthquake Early Warning. J. Geophys. Res. Solid Earth 2013, 118, 1038–1050. [Google Scholar] [CrossRef]
- Hoshiba, M.; Aoki, S. Numerical Shake Prediction for Earthquake Early Warning: Data Assimilation, Real-Time Shake Mapping, and Simulation of Wave Propagation. Bull. Seismol. Soc. Am. 2015, 105, 324–1338. [Google Scholar] [CrossRef]
- Ogiso, M.; Hoshiba, M.; Shito, A.; Matsumoto, S. Numerical Shake Prediction for Earthquake Early Warning Incorporating Heterogeneous Attenuation Structure: The Case of the 2016 Kumamoto Earthquake. Bull. Seismol. Soc. Am. 2018, 108, 3457–3468. [Google Scholar] [CrossRef]
- Kagawa, T. Application of the Modified PLUM Method to a Dense Seismic Intensity Network of a Local Government in Japan: A Case Study on Tottori Prefecture. Front. Earth Sci. 2021, 9, 672613. [Google Scholar] [CrossRef]
- Kodera, Y. An Earthquake Early Warning Method Based on Huygens Principle: Robust Ground Motion Prediction Using Various Localized Distance-Attenuation Models. J. Geophys. Res. Solid Earth 2019, 124, 12981–12996. [Google Scholar] [CrossRef]
- Kodera, Y.; Saitou, J.; Hayashimoto, N.; Adachi, S.; Morimoto, M.; Nishimae, Y.; Hoshiba, M. Earthquake early warning for the 2016 Kumamoto earthquake: Performance evaluation of the current system and the next-generation methods of the Japan Meteorological Agency. Earth Planets Space 2016, 68, 1–14. [Google Scholar] [CrossRef]
- Kodera, Y.; Hayashimoto, N.; Moriwaki, K.; Noguchi, K.; Saito, J.; Akutagawa, J.; Adachi, S.; Morimoto, M.; Okamoto, K.; Honda, S.; et al. First-Year Performance of a Nationwide Earthquake Early Warning System Using a Wavefield-Based Ground-Motion Prediction Algorithm in Japan. Seismol. Res. Lett. 2020, 91, 826–834. [Google Scholar] [CrossRef]
- Cochran, E.S.; Bunn, J.; Minson, S.E.; Baltay, A.S.; Kilb, D.L.; Kodera, Y.; Hoshiba, M. Event Detection Performance of the PLUM Earthquake Early Warning Algorithm in Southern California. Bull. Seismol. Soc. Am. 2019, 109, 1524–1541. [Google Scholar] [CrossRef]
- Minson, S.E.; Saunders, J.K.; Bunn, J.J.; Cochran, E.S.; Baltay, A.S.; Kilb, D.L.; Hoshiba, M.; Kodera, Y. Real-Time Performance of the PLUM Earthquake Early Warning Method during the 2019 M 6.4 and 7.1 Ridgecrest, California, Earthquakes. Bull. Seismol. Soc. Am. 2020, 110, 1887–1903. [Google Scholar] [CrossRef]
- Kilb, D.; Bunn, J.J.; Saunders, J.K.; Cochran, E.S.; Minson, S.E.; Baltay, A.; O’Rourke, C.T.; Hoshiba, M.; Kodera, Y. The PLUM Earthquake Early Warning Algorithm: A Retrospective Case Study of West Coast, USA, Data. J. Geophys. Res. Solid Earth 2021, 126, e2020JB021053. [Google Scholar] [CrossRef]
- Cochran, E.S.; Saunders, J.K.; Minson, S.E.; Bunn, J.; Baltay, A.; Kilb, D.; O’Rourke, C.; Hoshiba, M.; Kodera, Y. Alert Optimization of the PLUM Earthquake Early Warning Algorithm for the Western United States. Bull. Seismol. Soc. Am. 2022, 112, 803–819. [Google Scholar] [CrossRef]
- Cochran, E.S.; Kohler, M.D.; Given, D.D.; Guiwits, S.; Andrews, J.; Meier, M.A.; Ahmad, M.; Henson, I.; Hartog, R.; Smith, D. Earthquake Early Warning ShakeAlert System: Testing and Certification Platform. Seismol. Res. Lett. 2017, 89, 108–117. [Google Scholar] [CrossRef]
- Böse, M.; Heaton, T.; Hauksson, E. Rapid Estimation of Earthquake Source and Ground-Motion Parameters for Earthquake Early Warning Using Data from a Single Three-Component Broadband or Strong-Motion Sensor. Bull. Seismol. Soc. Am. 2012, 102, 738–750. [Google Scholar] [CrossRef]
- Meier, M.-A. How “good” are real-time ground motion predictions from Earthquake Early Warning systems? J. Geophys. Res. Solid Earth 2017, 122, 5561–5577. [Google Scholar] [CrossRef]
- Meier, M.A.; Kodera, Y.; Böse, M.; Chung, A.; Hoshiba, M.; Cochran, E.; Minson, S.; Hauksson, E.; Heaton, T. How Often Can Earthquake Early Warning Systems Alert Sites With High-Intensity Ground Motion? J. Geophys. Res. Solid Earth 2020, 125, e2019JB017718. [Google Scholar] [CrossRef]
- Minson, S.E.; Meier, M.A.; Baltay, A.S.; Hanks, T.C.; Cochran, E.S.J.S.A. The limits of earthquake early warning: Timeliness of ground motion estimates. Sci. Adv. 2018, 4, eaaq0504. [Google Scholar] [CrossRef]
- Minson, S.E.; Baltay, A.S.; Cochran, E.S.; Hanks, T.C.; Page, M.T.; McBride, S.K.; Milner, K.R.; Meier, M.A. The Limits of Earthquake Early Warning Accuracy and Best Alerting Strategy. Sci. Rep. 2019, 9, 2478. [Google Scholar] [CrossRef]
- Minson, S.E.; Cochran, E.S.; Wu, S.; Noda, S. A framework for evaluating earthquake early warning for an infrastructure network: An idealized case study of a northern California rail system. Front. Earth Sci. 2021, 9, 620467. [Google Scholar] [CrossRef]
- Wu, Y.M.; Mittal, H. A Review on the Development of Earthquake Warning System Using Low-Cost Sensors in Taiwan. Sensors 2021, 21, 7649. [Google Scholar] [CrossRef]
- Mittal, H.; Yang, B.M.; Tseng, T.L.; Wu, Y.M. Importance of real-time PGV in terms of lead-time and shakemaps: Results using 2018 ML 6.2 & 2019 ML 6.3 Hualien, Taiwan earthquakes. J. Asian Earth Sci. 2021, 220, 104936. [Google Scholar] [CrossRef]
- Chen, M.; Peng, C.; Cheng, Z. Earthquake event recognition on smartphones based on neural network models. Sensors 2022, 22, 8769. [Google Scholar] [CrossRef]
- Finazzi, F. The earthquake network project: Toward a crowdsourced smartphone-based earthquake early warning system. Bull. Seismol. Soc. Am. 2016, 106, 1088–1099. [Google Scholar] [CrossRef]
- Colombelli, S.; Carotenuto, F.; Elia, L.; Zollo, A. Design and implementation of a mobile device app for network-based earthquake early warning systems (EEWSs): Application to the PRESTo EEWS in southern Italy. Nat. Hazards Earth Syst. Sci. 2020, 20, 921–931. [Google Scholar] [CrossRef]
- Kong, Q.; Allen, R.M.; Schreier, L.; Kwon, Y.W. MyShake: A smartphone seismic network for earthquake early warning and beyond. Sci. Adv. 2016, 2, e1501055. [Google Scholar] [CrossRef] [PubMed]
- Esposito, M.; Palma, L.; Belli, A.; Sabbatini, L.; Pierleoni, P. Recent advances in internet of things solutions for early warning systems: A review. Sensors 2022, 22, 2124. [Google Scholar] [CrossRef] [PubMed]
- Alphonsa, A.; Ravi, G. Earthquake early warning system by IOT using Wireless sensor networks. In Proceedings of the 2016 IEEE International Conference on Wireless Communications, Signal Processing and Networking, WiSPNET 2016, Chennai, India, 23–25 March 2016; pp. 1201–1205. [Google Scholar]
- Wang, C.Y.; Huang, T.C.; Wu, Y.M. Using LSTM Neural Networks for Onsite Earthquake Early Warning. Seismol. Res. Lett. 2022, 93, 814–826. [Google Scholar] [CrossRef]
- Li, Z.; Meier, M.A.; Hauksson, E.; Zhan, Z.; Andrews, J. Machine learning seismic wave discrimination: Application to earthquake early warning. Geophys. Res. Lett. 2018, 45, 4773–4779. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
| Article | Category | Research Methods | Opinions |
|---|---|---|---|
| [25] | deterministic assumptions | Using extensive global seismic data, measured the period of seismic waves and calculated the scalar relationship between τp and Mw on a log–linear scale. | Information on the final magnitude of the earthquake was available within the first few seconds of the earthquake source rupture. |
| [26] | deterministic assumptions | The relationship that earthquake rupture initiation behavior has with earthquake magnitude was investigated using the early strong motion records of the near-source P and S signals, which demonstrated a statistically significant scale. | At the early stage of earthquake rupture, there was a proportional relationship between stress drop and/or active slip surface and seismic moment. |
| [27] | deterministic assumptions | Analyzed a high-quality seismic database to measure peak displacement (Pd) amplitudes with progressively expanding time windows. | The evolution of Pd with time was related to the early stages of the rupture process and could be used as an indicator of the final size of the rupture. |
| [28] | deterministic assumptions | The early P wave signals of earthquakes of different magnitudes were analyzed, and an amplitude parameter quantifying the initial peak amplitude was introduced to explore the possible differences in their early rupture. | Small and large earthquakes rupture at different initiation stages, and the final rupture extent of the seismic event was statistically controlled by its initial behavior. |
| [29] | no correlation assumption | Studied the proportional relationship between τp and Mw, as well as the effect of this relationship on whether the earthquake rupture was deterministic. | No evidence that the earthquake magnitude could be estimated before the rupture had been completed. |
| [30] | weak deterministic assumptions | Using a large amount of seismic data, examined how peak absolute vertical displacements evolve over time for different magnitudes. | Small and large ruptures started in indistinguishable ways. |
| [31] | weak deterministic assumptions | Before the arrival of the S wave, the vertical component Pd measured in the time window was gradually extended and a linear relationship was assumed between log10 (Pd) and the Mw. | The evolution of Pd over time suggested a general initial growth pattern that was inconsistent with deterministic models of earthquake rupture. |
| [32] | weak deterministic assumptions | From a finite fault model database of strong seismic events of magnitude Mw 7.0–9.0, the average rise time and rupture speeds of each seismic event were analyzed. | They proposed weak determinism, which held that the magnitude of an earthquake could be predicted after it had been nucleated for some time. |
| [33] | weak deterministic assumptions | Seismic and geodetic data were used to study early rupture indicators to determine if the observations supported deterministic rupture behavior. | Although the initial few seconds were not sufficient to infer the final earthquake magnitude, an accurate estimate could be made before the rupture was complete, which indicated a weak certainty. |
| [34] | weak deterministic assumptions | The typical temporal rupture behavior of large shallow subduction zone earthquakes was studied using three extensive source–time function catalogs. | The final magnitude could not be accurately predicted until the rupture had developed to a certain size. |
| Reference | Methods | Research Methods | Method Performance |
|---|---|---|---|
| [21] | Boundary integral equation | A simple wavefield estimation method that predicted earthquake intensity directly from the real-time seismic intensity observed near the target location. | The method was computationally inexpensive, overcame some disadvantages in terms of point sources and was a powerful method for wavefield estimation that could improve the performance of EEWS. |
| [82] | Boundary integral equation | Based on Huygens’ principle and the Kirchhoff–Fresnel boundary integral equation, the prediction of subsequent wave fields directly from the observed seismic wave field was proposed. | The method compensated for the shortcomings of the PSA but required a dense observation network; additionally, the warning time was short. |
| [83] | Radiative transfer theory | A method was proposed to accurately estimate the current wavefield distribution in real time using data assimilation techniques, and then the time evolution of future wavefields was predicted through seismic wave propagation simulations. | The method might mostly reflect the current actual observations, and the assimilation technique minimized the difference between the estimated current state and the actual observations. |
| [84] | Radiative transfer theory | The path term was incorporated into the numerical shake prediction scheme to predict future wave fields with heterogeneous attenuation structures. | Careful treatment of heterogeneous attenuation structures in numerical shake prediction could help improve ground motion forecasts, especially those with long lead times. |
| [85] | Radiative transfer theory | A modified Propagation of Local Undamped Motion (PLUM) was proposed by introducing an attenuation factor to the wave propagation. | Improved accuracy and rapidity of seismic intensity distribution compared to the original method. |
| [86] | Radiative transfer theory | The ALPHA algorithm was proposed; it is based on the Huygens principle, assumes multiple point source models below each observatory and establishes various attenuation relationships to predict intensity. | Compared to existing algorithms, ALPHA enables EEWS to provide accurate warnings to a wider area at an earlier stage. |
| Alarm Category | Abbreviations | Description |
|---|---|---|
| True Positive | TP | GM exceeds the threshold and alerts before it arrives |
| False Positive | FP | GM does not exceed the threshold, but the alarm is issued |
| True Negatives | TN | GM arrives without exceeding the threshold, and no alarm is issued |
| False Negative | FN | GM is above the threshold, but no alarm is issued |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Z.; Peng, C.; Chen, M. Real-Time Seismic Intensity Measurements Prediction for Earthquake Early Warning: A Systematic Literature Review. Sensors 2023, 23, 5052. https://doi.org/10.3390/s23115052
Cheng Z, Peng C, Chen M. Real-Time Seismic Intensity Measurements Prediction for Earthquake Early Warning: A Systematic Literature Review. Sensors. 2023; 23(11):5052. https://doi.org/10.3390/s23115052
Chicago/Turabian StyleCheng, Zhenpeng, Chaoyong Peng, and Meirong Chen. 2023. "Real-Time Seismic Intensity Measurements Prediction for Earthquake Early Warning: A Systematic Literature Review" Sensors 23, no. 11: 5052. https://doi.org/10.3390/s23115052
APA StyleCheng, Z., Peng, C., & Chen, M. (2023). Real-Time Seismic Intensity Measurements Prediction for Earthquake Early Warning: A Systematic Literature Review. Sensors, 23(11), 5052. https://doi.org/10.3390/s23115052