







Research on Parameter Optimization Method of Sliding Mode Controller for the Grid-Connected Composite Device Based on IMFO Algorithm


Abstract
1. Introduction
- (1)
- The mathematical model of MMC converter is established, and the controller of GCCD is designed according to the SMC principle, so that GCCD can meet the requirements of different operation modes and complex working conditions of the power grid.
- (2)
- By improving the MFO algorithm through GPS initialization and Levy flight strategy, this paper proposes an optimization method of converter control parameters based on IMFO algorithm. Through comparison and verification, the above improvements can effectively improve the convergence speed of the algorithm, avoid falling into local optimization, and significantly improve the optimization performance of the algorithm.
- (3)
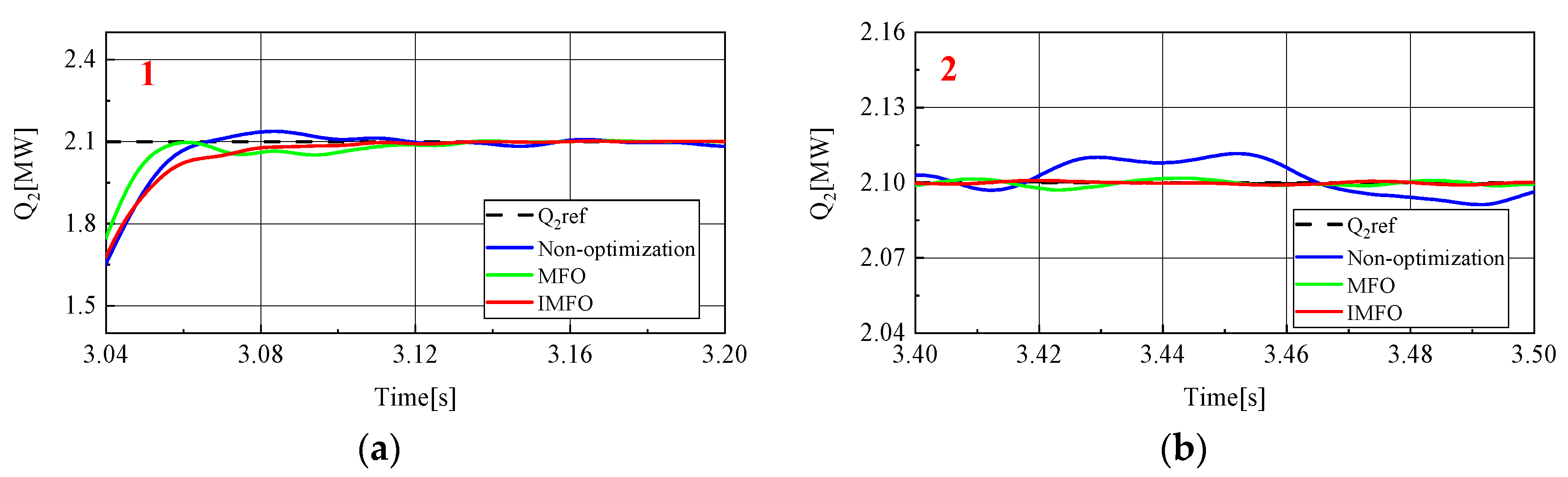
- In order to optimize the control parameters of the converter accurately, this paper proposes a parameter optimization method of sliding mode controller based on IMFO algorithm. Through Automation Library as a link, automatic parameter tuning is realized in Python-PSCAD joint simulation. By comparing the step response performance of non-optimization, MFO and IMFO, it is verified that the proposed method can effectively improve the GCCD control performance.
2. Sliding Mode Controller of the GCCD Based on Back-to-Back MMC-HVDC
2.1. The GCCD Based on Back-to-Back MMC-HVDC
2.2. Design of Sliding Mode Controller
2.2.1. Design of Current Inner Loop Sliding Mode Variable Structure Controller
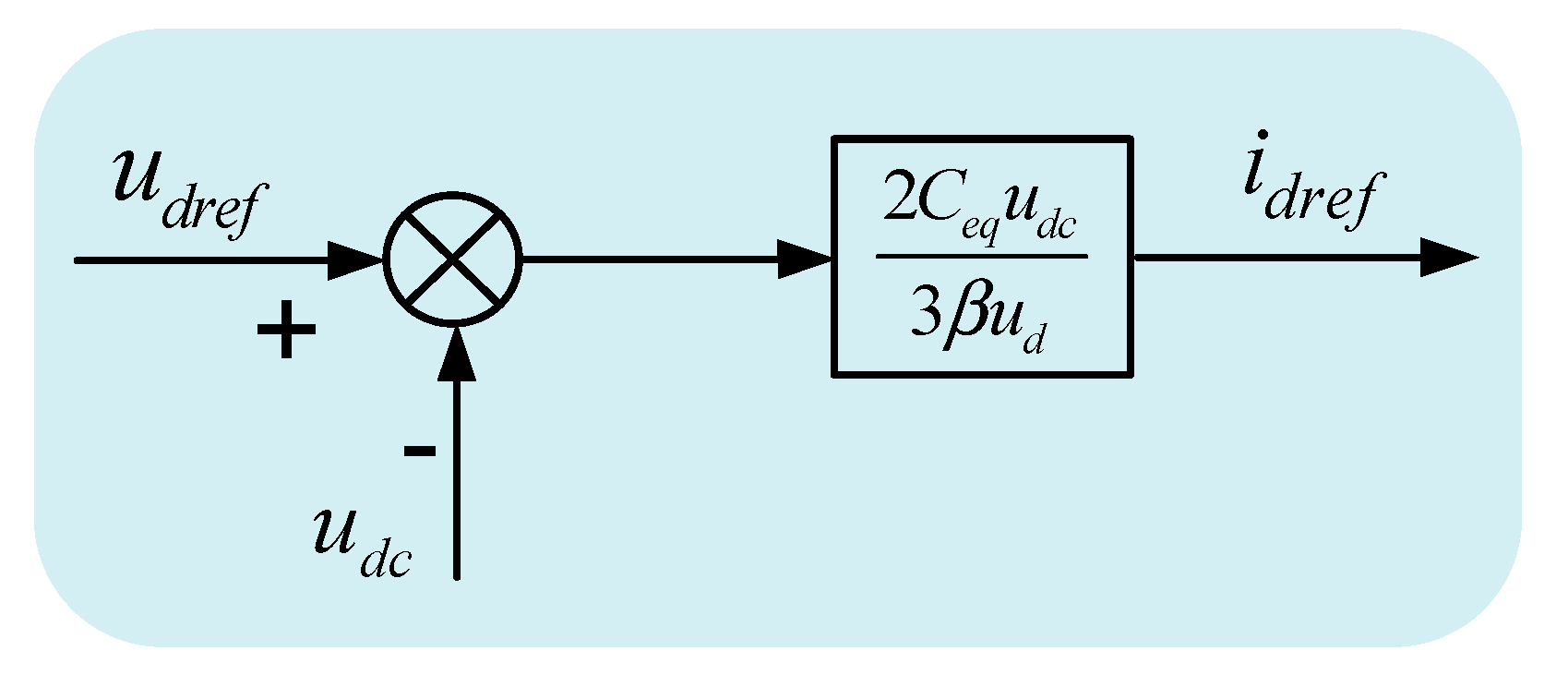
2.2.2. Design of Voltage Outer Loop Sliding Mode Variable Structure Controller
2.3. Necessity of Parameter Optimization
3. The Moth-Flame Optimization
3.1. Algorithm Principle
3.2. Improved MFO Algorithm
- (1)
- The convergence speed of the algorithm is slow in the later period. Considering that the spiral flight search and position update mechanism of the traditional MFO algorithm has a certain balance between the global search ability and the local search ability. In the early stage of optimization, the algorithm can quickly approach the relative optimal solution, but after a certain number of iterations, the spiral flight search will limit the moth to a small area. This search method will only make some minor updates to the current position, which will cause the convergence speed of the algorithm to slow down in the later stage.
- (2)
- Premature convergence. The MFO algorithm does not have a mechanism to jump out of the local optimum. Once it falls into the local optimum, it is difficult to jump out, leading to premature convergence. At the same time, the adaptive flame extinction mechanism of MFO algorithm has enhanced the ability of local optimization, but to a certain extent, it reduces the diversity of the population, and will also lead to premature convergence.
- (1)
- (2)
3.3. Performance Test of the IMFO Algorithm
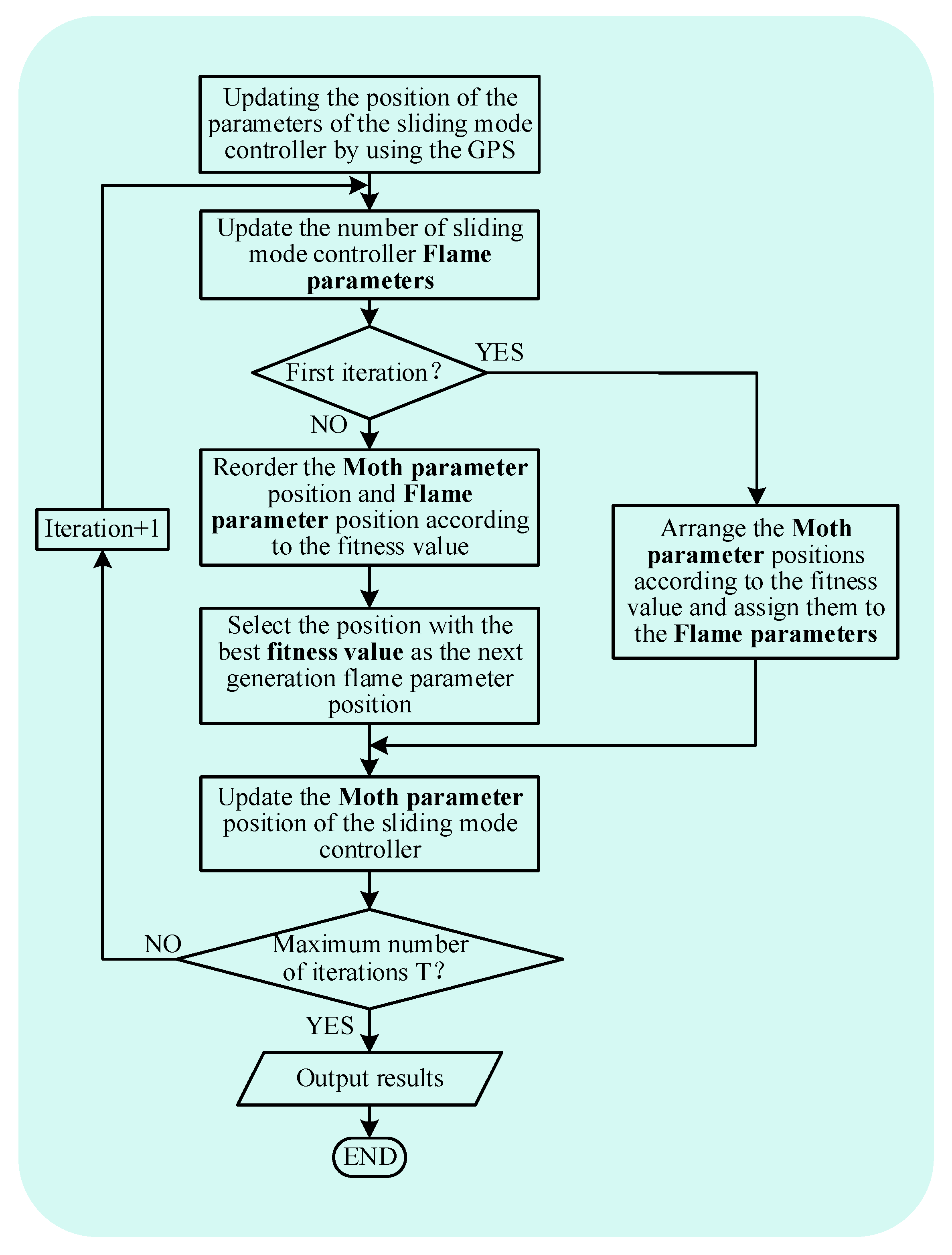
3.4. Application of IMFO Algorithm in Parameter Optimization of Sliding Mode Controller
4. Parameter Optimization of Sliding Mode Variable Controller
4.1. Objective Function
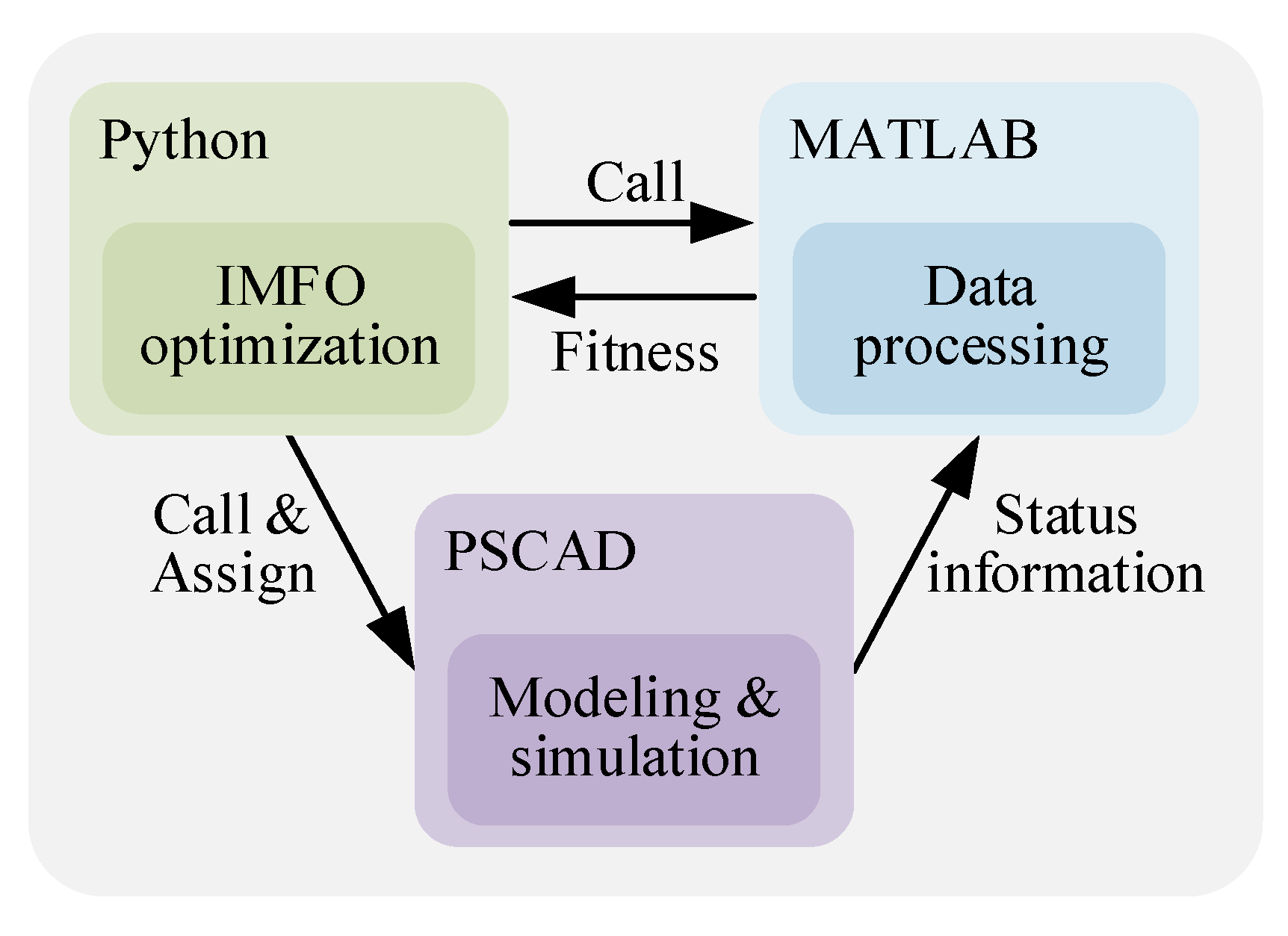
4.2. Python-PSCAD Joint Simulation
5. Simulation Verification
5.1. Simulation Model Parameters
5.2. Performance Analysis of Optimization Algorithm
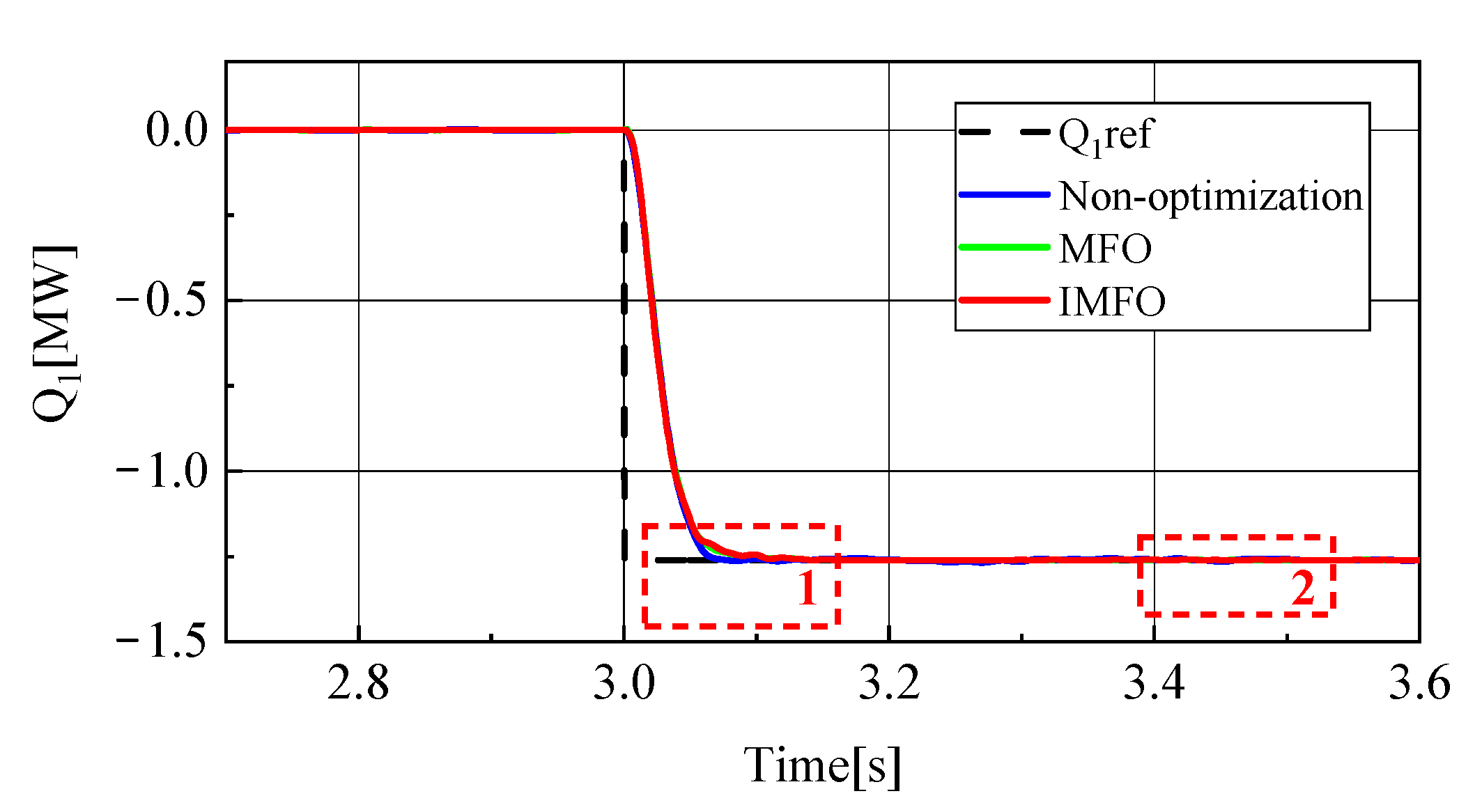
5.3. Parameter Control Effect Comparison after Optimization
6. Conclusions
- (1)
- This paper establishes the mathematical model of MMC converter, and designs GCCD controller according to SMC principle, so that the GCCD can meet the requirements of different operation modes and complex working conditions of power grid.
- (2)
- In this paper, the MFO algorithm is improved by using the GPS initialization and the Levy flight strategy, and the IMFO algorithm is proposed. By comparing the data performance of different algorithms under single peak and multi peak standard test functions, it can be seen that the proposed IMFO algorithm can effectively improve the performance of parameter optimization.
- (3)
- This paper proposes a sliding mode controller parameter optimization method based on the IMFO algorithm. The CITAE index is used as the standard to measure the control performance of sliding mode controller, and the IMFO algorithm is used to optimize the sliding mode controller parameters. Through Automation Library as a link, automatic parameter tuning is realized in Python-PSCAD joint simulation. By comparing the step response performance of non-optimization, MFO and IMFO, it can be seen that, compared with the traditional MFO algorithm, the IMFO algorithm can effectively reduce the DC side voltage fluctuation of the GCCD, improve the dynamic and static performance of the system, and further improve its control performance.
- (4)
- The controller constructed in this paper can effectively improve the dynamic and static performance of the GCCD, but the research background of this paper is the traditional power grid, and the applicability of this controller to the new power system with large-scale new energy access has not been verified. Later, we will continue to study the control strategy of the GCCD for this problem, so that the GCCD can be applied to different scenarios.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ersan, K. Review on novel single-phase grid-connected solar inverters: Circuits and control methods. Sol. Energy 2020, 198, 247–274. [Google Scholar]
- Liu, J.J. Principle and Technology of Synchronization and Paralleling between Power Grids Based on Power Transfer; Science Press: Beijing, China, 2018. [Google Scholar]
- Liu, J.J.; Yan, B.; Yao, L.X.; Liu, B.; Liu, D.; Xue, M.J. Research on tie-line power fluctuation based on power transmission parallel. Power Syst. Prot. Control 2012, 40, 125–128+144. [Google Scholar]
- Liu, J.J.; Liu, C.B. Calculation Method of the Parallel Device Capacity Based on the Power Transfer. Power Electron. 2014, 48, 57–60. [Google Scholar]
- Liu, J.J.; Yang, J. Research on Power Oscillation Suppression Strategy of Grid-connected Composite System Based on Impedance Optimization. In Proceedings of the 2021 4th International Conference on Energy, Electrical and Power Engineering (CEEPE), Chongqing, China, 23–25 April 2021; pp. 535–541. [Google Scholar]
- Ji, S.; Jiajun, L.; Yue, L.; Haokun, L.; Miao, M.; Chaolong, G. A New Grid Connection Mode of Low Inertia Power System. In Proceedings of the 2022 International Conference on Power Energy Systems and Applications (ICoPESA), Singapore, 25–27 February 2022; pp. 237–246. [Google Scholar]
- Althobaiti, A.; Ullah, N.; Belkhier, Y.; Jamal Babqi, A.; Alkhammash, H.I.; Ibeas, A. Expert knowledge based proportional resonant controller for three phase inverter under abnormal grid conditions. Int. J. Green Energy 2022, 1–17. [Google Scholar] [CrossRef]
- Kurian, G.M.; Jeyanthy, P.A.; Devaraj, D. FPGA Implementation of FLC-MPPT for Harmonics Reduction in Sustainable Photovoltaic System. Sustain. Energy Technol. Assess. 2022, 52, 102192. [Google Scholar]
- Forestieri, J.N.; Farasat, M.; Mitra, J. Hybrid Data-Model Predictive Control for Enabling Participation of Renewables in Regulating Reserves Service. IEEE Trans. Ind. Electron. 2022, 69, 11262–11271. [Google Scholar] [CrossRef]
- Guo, J.; Li, K.; Fan, J.; Luo, Y.; Wang, J. Neural-Fuzzy-Based Adaptive Sliding Mode Automatic Steering Control of Vision-based Unmanned Electric Vehicles. Chin. J. Mech. Eng. 2021, 34, 88. [Google Scholar] [CrossRef]
- Makhamreh, H.; Trabelsi, M.; Kükrer, O.; Abu-Rub, H. An Effective Sliding Mode Control Design for a Grid-Connected PUC7 Multilevel Inverter. IEEE Trans. Ind. Electron. 2020, 67, 3717–3725. [Google Scholar] [CrossRef]
- Belkhier, Y.; Shaw, R.N.; Bures, M.; Islam, M.R.; Bajaj, M.; Albalawi, F.; Alqurashi, A.; Ghoneim, S.S. Robust interconnection and damping assignment energy-based control for a permanent magnet synchronous motor using high order sliding mode approach and nonlinear observer. Energy Rep. 2022, 8, 1731–1740. [Google Scholar] [CrossRef]
- Memon, M.A.; Mekhilef, S.; Mubin, M.; Aamir, M. Selective Harmonic Elimination in Inverters using Bio-inspired Intelligent Algorithms for Renewable Energy Conversion Applications: A review. Renew. Sustain. Energy Rev. 2018, 82, 2235–2253. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Huang, L.N.; Yang, B.; Zhang, X.S.; Yin, L.F.; Yu, T.; Fang, Z.H. Optimal power tracking of doubly fed induction generator-based wind turbine using swarm moth–flame optimizer. Trans. Inst. Meas. Control 2019, 41, 1491–1503. [Google Scholar] [CrossRef]
- Pan, X.J.; Zhang, L.W.; Zhang, W.C.; Xu, Y.P.; Bian, H.Y.; Wang, X.J. Multi-operation Mode PSS Parameter Coordination Optimization Method Based on Moth-flame Optimization Algorithm. Power Syst. Technol. 2020, 44, 3038–3046. [Google Scholar]
- Wang, Z.Q.; Chen, J.F.; Zhang, G.F.; Yang, Q.; Dai, Y.H. Optimal Power Flow Calculation with Moth-Flame Optimization Algorithm. Power Syst. Technol. 2017, 44, 3642–3647. [Google Scholar]
- Alali, M.A.E.; Shtessel, Y.B.; Barbot, J.-P.; Di Gennaro, S. Sensor Effects in LCL-Type Grid-Connected Shunt Active Filters Control Using Higher-Order Sliding Mode Control Techniques. Sensors 2022, 22, 7516. [Google Scholar] [CrossRef]
- Cao, Y.L.; Cao, J.A.; Song, X.; Liu, Y.J. Research on vector control of PMSM based on an improved sliding mode observer. Power Syst. Prot. Control 2021, 49, 104–111. [Google Scholar]
- Xia, X.; Zhang, B.; Li, X. High Precision Low-Speed Control for Permanent Magnet Synchronous Motor. Sensors 2020, 20, 1526. [Google Scholar] [CrossRef]
- Singh, T.; Saxena, N.; Khurana, M.; Singh, D.; Abdalla, M.; Alshazly, H. Data Clustering Using Moth-Flame Optimization Algorithm. Sensors 2021, 21, 4086. [Google Scholar] [CrossRef]
- He, S.M.; Yuan, Z.Y.; Lei, J.Y.; Xu, Q.; Lin, Y.H.; Liu, Y.L.; Lin, X.H. Optimal setting method of inverse time over-current protection for a distribution network based on the improved grey wolf optimization. Power Syst. Prot. Control. 2021, 49, 173–181. [Google Scholar]
- Li, W.; Lu, Y.Q.; Fan, C.L. Target threat estimation based on lasso algorithm and improved sine cosine optimized support vector regression. Control. Decis. 2022, 1–9. [Google Scholar] [CrossRef]
- Bo, L.; Li, Z.; Liu, Y.; Yue, Y.; Zhang, Z.; Wang, Y. Research on Multi-Level Scheduling of Mine Water Reuse Based on Improved Whale Optimization Algorithm. Sensors 2022, 22, 5164. [Google Scholar] [CrossRef] [PubMed]
- Tang, A.D.; Han, T.; Zhou, H.; Xie, L. An Improved Equilibrium Optimizer with Application in Unmanned Aerial Vehicle Path Planning. Sensors 2021, 21, 1814. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategy | Advantage | Disadvantage |
|---|---|---|
| PID Control [7] | Simple structure, strong robustness | Proportional control will affect the dynamic performance of the system |
| Fuzzy control [8] | Strong applicability, strong robustness | The control scheme depends on human experience |
| Hysteresis Control [9] | Simple parameters, fast response | Frequent switch changes |
| Sliding mode control [10] | Dynamic performance enhancements | Complex parameters, difficult to set manually |
| Test Function | Expression | |
|---|---|---|
| 0 | ||
| 0 | ||
| 0 | ||
| 0 | ||
| 0 | ||
| 0 |
| Test Function | Algorithm | Average Value | Variance |
|---|---|---|---|
| PSO | 2.642245 | 0.144362 | |
| MFO | 7.92 × 10−30 | 1.49 × 10−59 | |
| IMFO | 1.10 × 10−189 | 0 | |
| PSO | 1.09857 | 0.028251 | |
| MFO | 1.333333 | 3.8 × 10−38 | |
| IMFO | 4.5 × 10−103 | 1 × 10−208 | |
| PSO | 19.21238 | 88.85796 | |
| MFO | 1.34 × 10−6 | 2.13 × 10−14 | |
| IMFO | 2.8 × 10−151 | 0 | |
| PSO | 70.70418 | 0.876751 | |
| MFO | 12.25906 | 4.81 × 10−24 | |
| IMFO | 3.6 × 10−101 | 9.5 × 10−212 | |
| PSO | 26.16555 | 110.6147 | |
| MFO | 21.62607 | 24.74814 | |
| IMFO | 0 | 0 | |
| PSO | 1.565486 | 0.038066 | |
| MFO | 4.91 × 10−15 | 0 | |
| IMFO | 8.88 × 10−16 | 0 |
| Parameter | Value |
|---|---|
| system voltage | 220 kV |
| DC side voltage rating | 40 kV |
| MMC capacity | 40 MVA |
| number of bridge arm modules | 40 |
| sub module capacitance value | 10 mF |
| inductance value of bridge arm reactor | 10 mH |
| Algorithm | CITAE Value |
|---|---|
| non-optimization | 0.442789 |
| MFO | 0.366769 |
| IMFO | 0.358213 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Liu, J.; Miao, M.; Lin, H. Research on Parameter Optimization Method of Sliding Mode Controller for the Grid-Connected Composite Device Based on IMFO Algorithm. Sensors 2023, 23, 149. https://doi.org/10.3390/s23010149
Sun J, Liu J, Miao M, Lin H. Research on Parameter Optimization Method of Sliding Mode Controller for the Grid-Connected Composite Device Based on IMFO Algorithm. Sensors. 2023; 23(1):149. https://doi.org/10.3390/s23010149
Chicago/Turabian StyleSun, Ji, Jiajun Liu, Miao Miao, and Haokun Lin. 2023. "Research on Parameter Optimization Method of Sliding Mode Controller for the Grid-Connected Composite Device Based on IMFO Algorithm" Sensors 23, no. 1: 149. https://doi.org/10.3390/s23010149
APA StyleSun, J., Liu, J., Miao, M., & Lin, H. (2023). Research on Parameter Optimization Method of Sliding Mode Controller for the Grid-Connected Composite Device Based on IMFO Algorithm. Sensors, 23(1), 149. https://doi.org/10.3390/s23010149