
SDFnT-Based Parameter Estimation for OFDM Radar Systems with Intercarrier Interference


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- We propose a novel scale discrete Fresnel transform that can convert a time-domain signal into the scale Fresnel domain, with the resultant projection varying with the value of the non-zero scale factor. With its help, we are able to address the ICI mitigation issue for OFDM radar systems;
- Based on the SDFnT, we develop a brand-new ICI-free parameter estimation method for OFDM radars in high-mobility scenarios. We transfer the received and transmitted OFDM signals to the scale Fresnel domain and convert the ICI-induced phase rotation matrix into an identity matrix by using the optimal value of the scale factor. This approach can effectively eliminate the ICI effect caused by high velocity with low computational complexity;
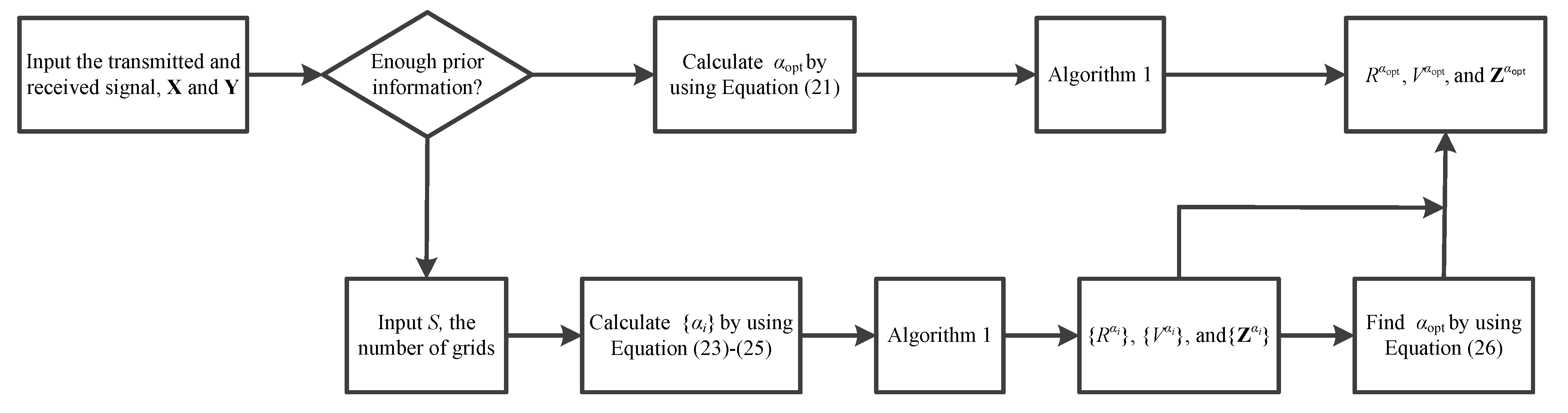
- We establish a thorough processing flow to ensure that the appropriate scale factor value is obtained and the proposed algorithm can be applied properly regardless of the presence or absence of sufficient prior information;
- We compare the proposed method with the conventional estimation method via extensive simulations and validate the superiority of the proposed method in terms of velocity and SNR, as well as its robustness against the scale factor error.
2. Signal Model
3. SDFnT-Based ICI Mitigation Method
3.1. SDFnT
3.2. ICI Mitigation
| Algorithm 1 Proposed SDFnT-based parameter estimation algorithm for OFDM radar |
| Input: The transmitted and received time domain signals, X, Y, and the scale factor α; |
| Output: Z, R, and V; |
| Step 1: Convert the transmitted and received signal into the scale Fresnel domain, GαX and GαY, via the SDFnT matrix Gα; |
| Step 2: Perform an element-wise complex division on GαY and GαX to calculate the phase matrix P using Equation (23); |
| Step 3: Perform 2D-FFT on matrix P to obtain the range-Doppler radar image Z by using Equation (24); |
| Step 4: Find the peak of radar image Z, and obtain the estimates of range and velocity, R and V. |
4. Simulation Results
4.1. Impacts of Grid Number on Radar Performance
4.1.1. Radar Performance in Terms of SNR
4.1.2. Radar Performance in Terms of Velocity
4.2. Single Target Simulations for Radar
4.2.1. Range-Velocity Image
4.2.2. Radar Performance in Terms of SNR
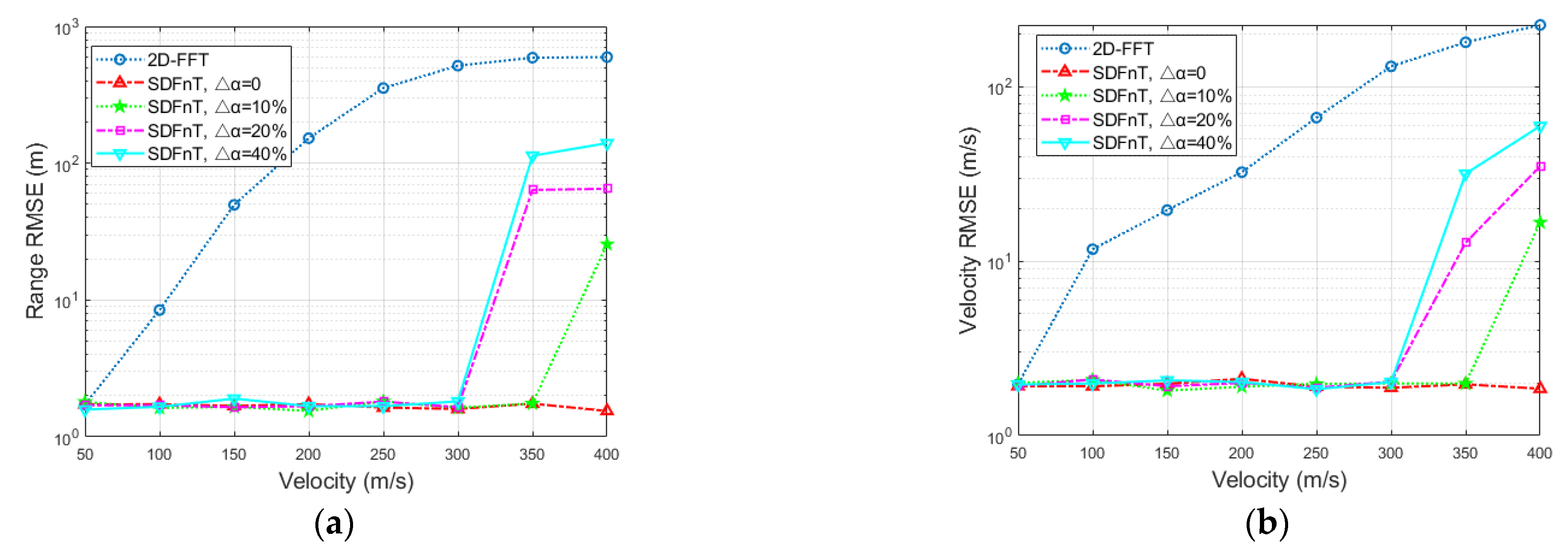
4.2.3. Radar Performance in Terms of Velocity
4.3. Multiple Target Simulations for Radar
4.3.1. Range-Velocity Image
4.3.2. Radar Performance for Clustered Targets in Terms of SNR
4.3.3. Radar Performance for Scattered Targets in Terms of SNR
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bică, M.; Koivunen, V. Generalized Multicarrier Radar: Models and Performance. IEEE Trans. Signal Process. 2016, 64, 4389–4402. [Google Scholar] [CrossRef]
- Giroto de Oliveira, L.; Nuss, B.; Alabd, M.B.; Diewald, A.; Pauli, M.; Zwick, T. Joint Radar-Communication Systems: Modulation Schemes and System Design. IEEE Trans. Microw. Theory Tech. 2022, 70, 1521–1551. [Google Scholar] [CrossRef]
- Saleem, A.; Cui, H.; He, Y.; Boag, A. Channel Propagation Characteristics for Massive Multiple-Input/Multiple-Output Systems in a Tunnel Environment [Measurements Corner]. IEEE Antennas Propag. Mag. 2022, 64, 126–142. [Google Scholar] [CrossRef]
- Zhou, W.; Zhang, R.; Chen, G.; Wu, W. Integrated Sensing and Communication Waveform Design: A Survey. IEEE J. Sel. Top. Signal Process. 2022, 3, 1930–1949. [Google Scholar] [CrossRef]
- Berger, C.R.; Demissie, B.; Heckenbach, J.; Willett, P.; Zhou, S. Signal Processing for Passive Radar Using OFDM Waveforms. IEEE J. Sel. Top. Signal Process. 2010, 4, 226–238. [Google Scholar] [CrossRef]
- Wu, K.; Zhang, J.A.; Huang, X.; Guo, Y.J. Joint Communications and Sensing Employing Multi- or Single-Carrier OFDM Communication Signals: A Tutorial on Sensing Methods, Recent Progress and a Novel Design. Sensors 2022, 22, 1613. [Google Scholar] [CrossRef] [PubMed]
- Zeng, R.; Huang, H.; Yang, L.; Zhang, Z. Joint Estimation of Frequency Offset and Doppler Shift in High Mobility Environments Based on Orthogonal Angle Domain Subspace Projection. IEEE Trans. Veh. Technol. 2018, 67, 2254–2266. [Google Scholar] [CrossRef]
- Nemati, M.; Arslan, H. Low ICI Symbol Boundary Alignment for 5G Numerology Design. IEEE Access 2018, 6, 2356–2366. [Google Scholar] [CrossRef]
- Cheng, J.; Jia, C.; Gao, H.; Xu, W.; Bie, Z. OTFS Based Receiver Scheme with Multi-Antennas in High-Mobility V2X Systems. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Hlawatsch, F.; Matz, G. Wireless Communications Over Rapidly Time-Varying Channels, 1st ed.; Academic Press, Inc.: Cambridge, MA, USA, 2011; ISBN 0-12-374483-0. [Google Scholar]
- Mostofi, Y.; Cox, D.C. ICI Mitigation for Pilot-Aided OFDM Mobile Systems. IEEE Trans. Wirel. Commun. 2005, 4, 765–774. [Google Scholar] [CrossRef]
- Roman, T.; Visuri, S.; Koivunen, V. Blind Frequency Synchronization in OFDM via Diagonality Criterion. IEEE Trans. Signal Process. 2006, 54, 3125–3135. [Google Scholar] [CrossRef]
- Vlachos, E.; Lalos, A.S.; Berberidis, K.; Thompson, J. Adaptive Windowing for ICI Mitigation in Vehicular Communications. IEEE Wirel. Commun. Lett. 2018, 7, 974–977. [Google Scholar] [CrossRef]
- Zhu, D.; Li, Y.; Zhu, Z. A Keystone Transform Without Interpolation for SAR Ground Moving-Target Imaging. IEEE Geosci. Remote Sens. Lett. 2007, 4, 18–22. [Google Scholar] [CrossRef]
- Xu, J.; Yu, J.; Peng, Y.-N.; Xia, X.-G. Radon-Fourier Transform for Radar Target Detection, I: Generalized Doppler Filter Bank. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1186–1202. [Google Scholar] [CrossRef]
- Rao, X.; Tao, H.; Su, J.; Guo, X.; Zhang, J. Axis Rotation MTD Algorithm for Weak Target Detection. Digit. Signal Process. 2014, 26, 81–86. [Google Scholar] [CrossRef]
- Zheng, J.; Su, T.; Zhu, W.; He, X.; Liu, Q.H. Radar High-Speed Target Detection Based on the Scaled Inverse Fourier Transform. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 1108–1119. [Google Scholar] [CrossRef]
- Zheng, J.; Su, T.; Liu, H.; Liao, G.; Liu, Z.; Liu, Q.H. Radar High-Speed Target Detection Based on the Frequency-Domain Deramp-Keystone Transform. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 285–294. [Google Scholar] [CrossRef]
- Niu, Z.; Zheng, J.; Su, T.; Zhang, J. Fast Implementation of Scaled Inverse Fourier Transform for High-Speed Radar Target Detection. Electron. Lett. 2017, 53, 1142–1144. [Google Scholar] [CrossRef]
- Lellouch, G.; Pribic, R.; van Genderen, P. Wideband OFDM Pulse Burst and Its Capabilities for the Doppler Processing in Radar. In Proceedings of the 2008 International Conference on Radar, Radar, Australia, 2–5 September 2008; pp. 531–535. [Google Scholar]
- Lellouch, G.; Mishra, A.K.; Inggs, M. Stepped OFDM Radar Technique to Resolve Range and Doppler Simultaneously. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 937–950. [Google Scholar] [CrossRef]
- Schweizer, B.; Knill, C.; Schindler, D.; Waldschmidt, C. Stepped-Carrier OFDM-Radar Processing Scheme to Retrieve High-Resolution Range-Velocity Profile at Low Sampling Rate. IEEE Trans. Microw. Theory Tech. 2018, 66, 1610–1618. [Google Scholar] [CrossRef]
- Tian, X.; Zhang, T.; Zhang, Q.; Song, Z. High Accuracy Doppler Processing With Low Complexity in OFDM-Based RadCom Systems. IEEE Commun. Lett. 2017, 21, 2618–2621. [Google Scholar] [CrossRef]
- Lellouch, G.; Mishra, A.; Inggs, M. Impact of the Doppler Modulation on the Range and Doppler Processing in OFDM Radar. In Proceedings of the 2014 IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 0803–0808. [Google Scholar]
- Tigrek, R.F.; Heij, W.J.A.D.; Genderen, P.V. OFDM Signals as the Radar Waveform to Solve Doppler Ambiguity. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 130–143. [Google Scholar] [CrossRef]
- Sturm, C.; Wiesbeck, W. Waveform Design and Signal Processing Aspects for Fusion of Wireless Communications and Radar Sensing. Proc. IEEE 2011, 99, 1236–1259. [Google Scholar] [CrossRef]
- Zhou, Q.; Tian, X.; Zhang, T. Low Complexity ICI Mitigation in OFDM Based RadCom Systems. In Proceedings of the 2020 International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 21–23 October 2020; pp. 1022–1027. [Google Scholar]
- Lim, J.; Kim, S.; Shin, D. Two-Step Doppler Estimation Based on Intercarrier Interference Mitigation for OFDM Radar. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1726–1729. [Google Scholar] [CrossRef]
- Hakobyan, G.; Yang, B. A Novel Intercarrier-Interference Free Signal Processing Scheme for OFDM Radar. IEEE Trans. Veh. Technol. 2018, 67, 5158–5167. [Google Scholar] [CrossRef]
- Zhang, F.; Zhang, Z.; Yu, W.; Truong, T. Joint Range and Velocity Estimation With Intrapulse and Intersubcarrier Doppler Effects for OFDM-Based RadCom Systems. IEEE Trans. Signal Process. 2020, 68, 662–675. [Google Scholar] [CrossRef]
- Keskin, M.F.; Wymeersch, H.; Koivunen, V. MIMO-OFDM Joint Radar-Communications: Is ICI Friend or Foe? IEEE J. Sel. Top. Sign. Process. 2021, 15, 1393–1408. [Google Scholar] [CrossRef]
- Ouyang, X.; Zhao, J. Orthogonal Chirp Division Multiplexing. IEEE Trans. Commun. 2016, 64, 3946–3957. [Google Scholar] [CrossRef]
- Winthrop, J.T.; Worthington, C.R. Theory of Fresnel Images. I. Plane Periodic Objects in Monochromatic Light*. J. Opt. Soc. Am. 1965, 55, 373–381. [Google Scholar] [CrossRef]
- de Dib, L.M.B.A.; Colen, G.R.; de Filomeno, M.L.; Ribeiro, M.V. Orthogonal Chirp Division Multiplexing for Baseband Data Communication Systems. IEEE Syst. J. 2020, 14, 2164–2174. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Wang, P.; Zhang, R.; Wu, W. SDFnT-Based Parameter Estimation for OFDM Radar Systems with Intercarrier Interference. Sensors 2023, 23, 147. https://doi.org/10.3390/s23010147
Wang J, Wang P, Zhang R, Wu W. SDFnT-Based Parameter Estimation for OFDM Radar Systems with Intercarrier Interference. Sensors. 2023; 23(1):147. https://doi.org/10.3390/s23010147
Chicago/Turabian StyleWang, Jingqi, Pingping Wang, Ruoyu Zhang, and Wen Wu. 2023. "SDFnT-Based Parameter Estimation for OFDM Radar Systems with Intercarrier Interference" Sensors 23, no. 1: 147. https://doi.org/10.3390/s23010147
APA StyleWang, J., Wang, P., Zhang, R., & Wu, W. (2023). SDFnT-Based Parameter Estimation for OFDM Radar Systems with Intercarrier Interference. Sensors, 23(1), 147. https://doi.org/10.3390/s23010147