
A Perspective on Passive Human Sensing with Bluetooth



Abstract
1. Introduction
- It is energy-efficient (its power consumption is lower than WiFi), in particular after the introduction of the Bluetooth Low Energy specifications in Bluetooth 4.0.
- Its deployment in business, industrial and home environments is simple and flexible, as Bluetooth devices are small, minimally invasive and less expensive than other solutions [15].
2. Related Work
- A Bluetooth beacon positioned under a medicine calendar (i.e., a tool used to norm the assumption of the correct daily dose of drugs).
- A computer tablet positioned at fixed, short distance from the beacon.
- A smartphone for the remote caregiver.
- Analysis of RSSI variance;
- Analysis of RSSI average.
3. Human Body Influence on the Bluetooth Signal
3.1. Bluetooth Recapitulation
- 1.
- Asynchronous Connection-Less: a uni-directional communication, in which a slave device (also called advertiser or broadcaster) periodically sends packets, while a master device (also called hub or scanner) continuously scans the channels while waiting for packets.
- 2.
- Synchronous Connection-Oriented: a bi-directional communication, in which a connection between a master and a slave is established over a dedicated channel.
3.1.1. Bluetooth Low Energy
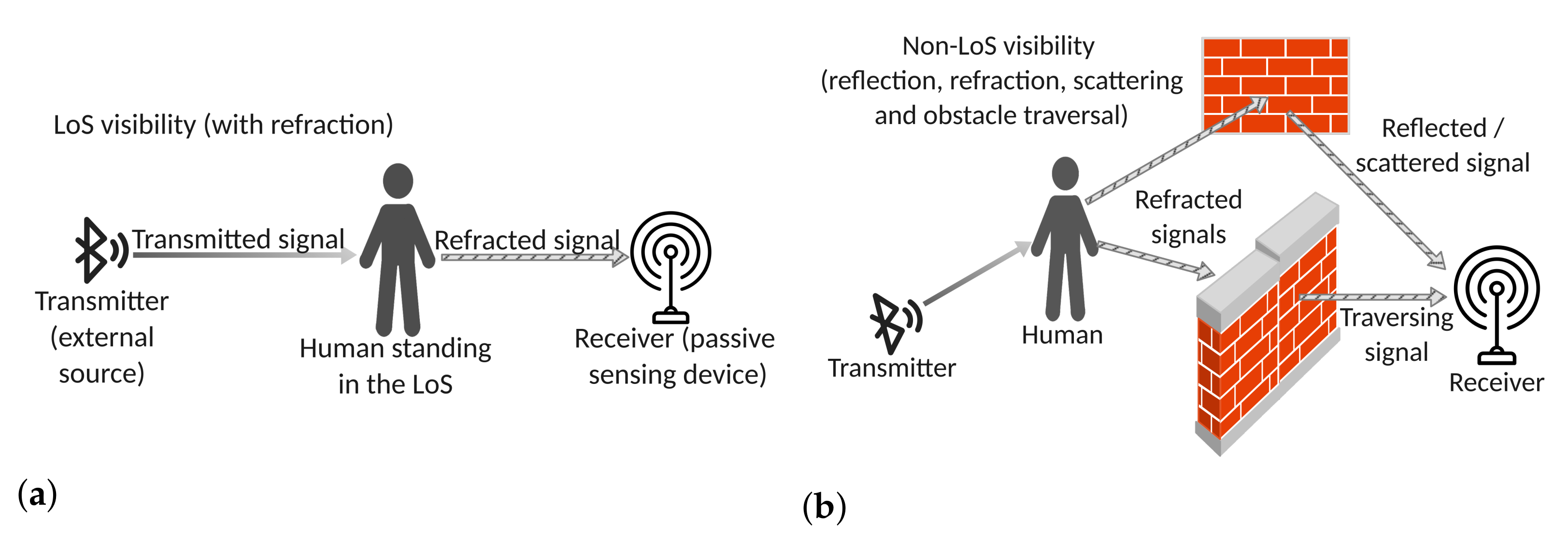
3.2. Influence on Bluetooth Signal
4. Data Preprocessing
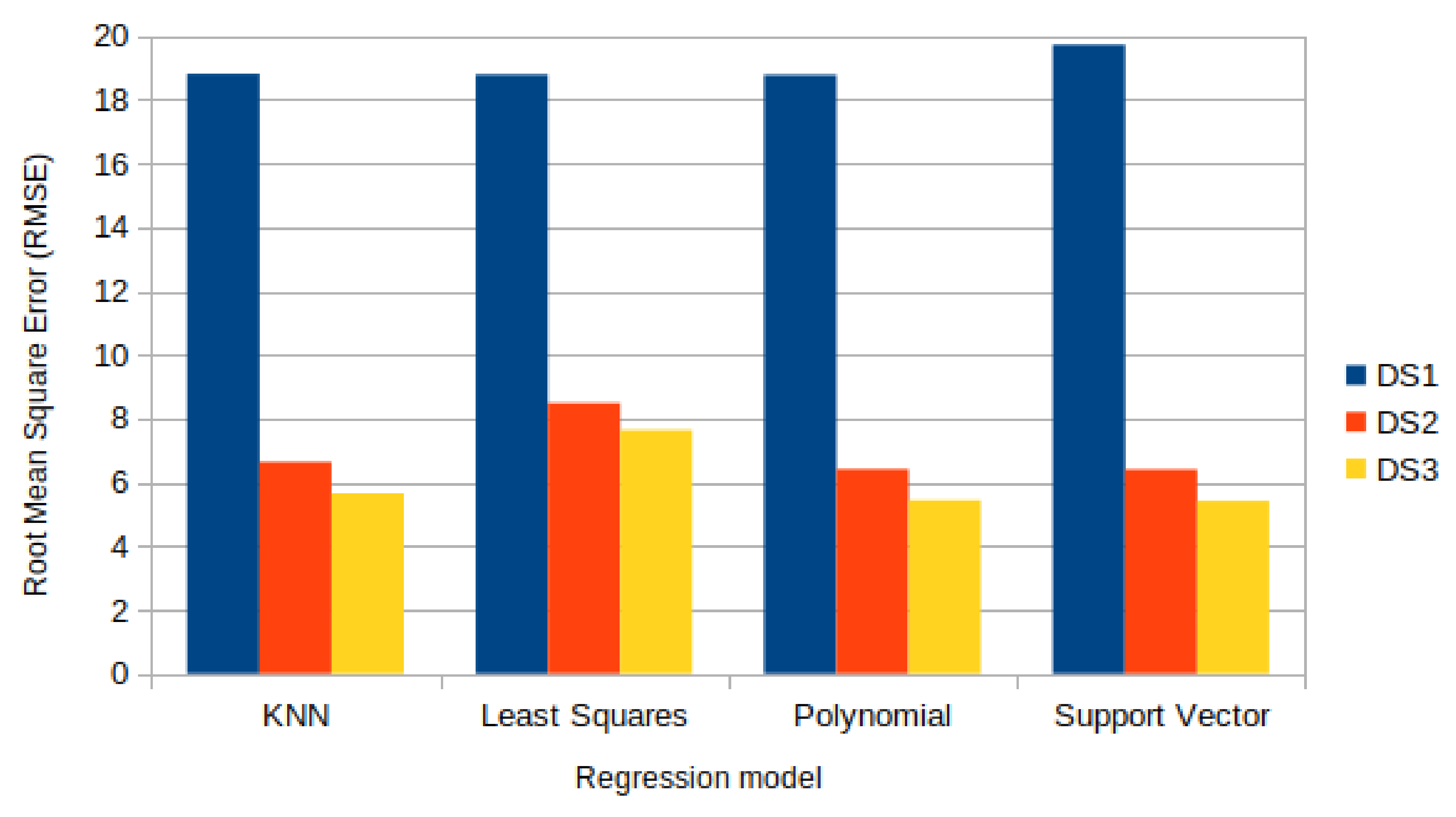
- DS1, containing raw RSSI values.
- DS2 and DS3, containing preprocessed data.
5. Classification Methods
5.1. Statistical Methods
5.2. Machine Learning Methods
- DS1, containing the raw RSSI data.
- DS2, containing data resulting from the first preprocessing step.
- DS3, containing data resulting from the second preprocessing step.
5.3. Artificial Neural Networks
6. Overall Performance Comparison
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Youssef, M.; Mah, M.; Agrawala, A. Challenges: Device-Free Passive Localization for Wireless Environments. In Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking, Montreal, QC, Canada, 9–14 September 2007; Association for Computing Machinery: New York, NY, USA, 2007; pp. 222–229. [Google Scholar] [CrossRef]
- Aggarwal, J.; Ryoo, M. Human Activity Analysis: A Review. ACM Comput. Surv. 2011, 43, 1–43. [Google Scholar] [CrossRef]
- Iannizzotto, G.; Lo Bello, L.; Patti, G. Personal Protection Equipment detection system for embedded devices based on DNN and Fuzzy Logic. Expert Syst. Appl. 2021, 184, 115447. [Google Scholar] [CrossRef]
- Beddiar, D.R.; Nini, B.; Sabokrou, M.; Hadid, A. Vision-based human activity recognition: A survey. Multimed. Tools Appl. 2020, 79, 30509–30555. [Google Scholar] [CrossRef]
- Dondi, P.; Porta, M.; Donvito, A.; Volpe, G. A gaze-based interactive system to explore artwork imagery. J. Multimodal User Interfaces 2022, 16, 55–67. [Google Scholar] [CrossRef]
- Liu, J.; Teng, G.; Hong, F. Human Activity Sensing with Wireless Signals: A Survey. Sensors 2020, 20, 1210. [Google Scholar] [CrossRef] [PubMed]
- Iannizzotto, G.; La Rosa, F.; Lo Bello, L. A wireless sensor network for distributed autonomous traffc monitoring. In Proceedings of the 3rd International Conference on Human System Interaction, Rzeszow, Poland, 13–15 May 2010; pp. 612–619. [Google Scholar] [CrossRef]
- Bayrakdar, M.E. Priority based health data monitoring with IEEE 802.11 af technology in wireless medical sensor networks. Med. Biol. Eng. Comput. 2019, 57, 2757–2769. [Google Scholar] [CrossRef]
- Mishra, A.; Kumari, A.; Sajit, P.; Pandey, P. Remote web based ECG Monitoring using MQTT Protocol for IoT in Healthcare. Development 2018, 5, 1096–1109. [Google Scholar]
- Leonardi, L.; Lo Bello, L.; Patti, G.; Ragusa, O. A Network Architecture and Routing Protocol for the MEDIcal WARNing System. J. Sens. Actuator Netw. 2021, 10, 44. [Google Scholar] [CrossRef]
- Fedullo, T.; Tramarin, F.; Vitturi, S. The Impact of Rate Adaptation Algorithms on Wi-Fi-Based Factory Automation Systems. Sensors 2020, 20, 5195. [Google Scholar] [CrossRef]
- Depari, A.; De Dominicis, C.M.; Flammini, A.; Rinaldi, S.; Vezzoli, A. Integration of Bluetooth HandsFree Sensors into a Wireless Body Area Network Based on Smartphone. In Sensors; Baldini, F., D’Amico, A., Di Natale, C., Siciliano, P., Seeber, R., De Stefano, L., Bizzarri, R., Andò, B., Eds.; Springer: New York, NY, USA, 2014; pp. 547–551. [Google Scholar]
- Depari, A.; Flammini, A.; Rinaldi, S.; Vezzoli, A. Multi-sensor system with Bluetooth connectivity for non-invasive measurements of human body physical parameters. Sens. Actuators A Phys. 2013, 202, 147–154. [Google Scholar] [CrossRef]
- De Dominicis, C.M.; Mazzotti, D.; Piccinelli, M.; Rinaldi, S.; Vezzoli, A.; Depari, A. Evaluation of Bluetooth Hands-Free profile for sensors applications in smartphone platforms. In Proceedings of the 2012 IEEE Sensors Applications Symposium, Brescia, Italy, 7–9 February 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Collotta, M.; Pau, G. An Innovative Approach for Forecasting of Energy Requirements to Improve a Smart Home Management System Based on BLE. IEEE Trans. Green Commun. Netw. 2017, 1, 112–120. [Google Scholar] [CrossRef]
- Huang, B.; Liu, J.; Sun, W.; Yang, F. A Robust Indoor Positioning Method based on Bluetooth Low Energy with Separate Channel Information. Sensors 2019, 19, 3487. [Google Scholar] [CrossRef] [PubMed]
- Madhavapeddy, A.; Tse, A. A Study of Bluetooth Propagation Using Accurate Indoor Location Mapping. In Proceedings of the 7th International Conference on Ubiquitous Computing, Tokyo, Japan, 11–14 September 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 105–122. [Google Scholar] [CrossRef]
- Naghdi, S.; O’Keefe, K. Detecting and Correcting for Human Obstacles in BLE Trilateration Using Artificial Intelligence. Sensors 2020, 20, 1350. [Google Scholar] [CrossRef] [PubMed]
- Faragher, R.; Harle, R. Location Fingerprinting With Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef]
- Kaltiokallio, O.; Bocca, M.; Patwari, N. Follow @grandma: Long-term device-free localization for residential monitoring. In Proceedings of the 37th Annual IEEE Conference on Local Computer Networks—Workshops, Clearwater, FL, USA, 22–25 October 2012; pp. 991–998. [Google Scholar] [CrossRef]
- Kaltiokallio, O.; Bocca, M. Real-Time Intrusion Detection and Tracking in Indoor Environment through Distributed RSSI Processing. In Proceedings of the 2011 IEEE 17th International Conference on Embedded and Real-Time Computing Systems and Applications, Toyama, Japan, 28–31 August 2011; Volume 1, pp. 61–70. [Google Scholar] [CrossRef]
- Surian, D.; Kim, V.; Menon, R.; Dunn, A.G.; Sintchenko, V.; Coiera, E. Tracking a moving user in indoor environments using Bluetooth low energy beacons. J. Biomed. Inform. 2019, 98, 103288. [Google Scholar] [CrossRef]
- Demrozi, F.; Bragoi, V.; Tramarin, F.; Pravadelli, G. An indoor localization system to detect areas causing the freezing of gait in Parkinsonians. In Proceedings of the 2019 Design, Automation Test in Europe Conference Exhibition (DATE), Florence, Italy, 25–29 March 2019; pp. 952–955. [Google Scholar] [CrossRef]
- Filippoupolitis, A.; Oliff, W.; Loukas, G. Occupancy Detection for Building Emergency Management Using BLE Beacons. In Computer and Information Sciences; Czachórski, T., Gelenbe, E., Grochla, K., Lent, R., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 233–240. [Google Scholar]
- Tekler, Z.D.; Low, R.; Blessing, L. An alternative approach to monitor occupancy using bluetooth low energy technology in an office environment. J. Phys. Conf. Ser. 2019, 1343, 012116. [Google Scholar] [CrossRef]
- Daniş, F.S.; Cemgil, A.T. Model-Based Localization and Tracking Using Bluetooth Low-Energy Beacons. Sensors 2017, 17, 2484. [Google Scholar] [CrossRef]
- Baronti, P.; Barsocchi, P.; Chessa, S.; Mavilia, F.; Palumbo, F. Indoor Bluetooth Low Energy Dataset for Localization, Tracking, Occupancy, and Social Interaction. Sensors 2018, 18, 4462. [Google Scholar] [CrossRef]
- Čakić, S.; Šandi, S.; Nedić, D.; Krčo, S.; Popović, T. Human Activity Detection Using Deep Learning and Bracelet with Bluetooth Transmitter. In Proceedings of the 2021 29th Telecommunications Forum (TELFOR), Belgrade, Serbia, 23–24 November 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Hussain, S.; Peters, R.; Silver, D. Using received signal strength variation for surveillance in residential areas. Proc. Spie -Int. Soc. Opt. Eng. 2008, 6973, 213–218. [Google Scholar] [CrossRef]
- Ma, Y.; Zhou, G.; Wang, S. WiFi Sensing with Channel State Information: A Survey. ACM Comput. Surv. 2019, 52. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Y.; Li, W.; Tao, X.; Zhang, P. ConFi: Convolutional Neural Networks Based Indoor Wi-Fi Localization Using Channel State Information. IEEE Access 2017, 5, 18066–18074. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, L.; Jiang, C.; Cao, Z.; Cui, W. WiFi CSI Based Passive Human Activity Recognition Using Attention Based BLSTM. IEEE Trans. Mob. Comput. 2019, 18, 2714–2724. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, T.; Jiang, Y.; Chen, B. Harvesting Ambient RF for Presence Detection Through Deep Learning. IEEE Trans. Neural Netw. Learn. Syst. 2020, 33, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Woolley, M. Bluetooth Core Specification v5.1 Feature Overview. Available online: https://www.bluetooth.com/bluetooth-resources/bluetooth-core-specification-v5-1-feature-overview/ (accessed on 1 April 2022).
- Zhou, B.; Sun, C.; Ahn, D.; Kim, Y. A Novel Passive Tracking Scheme Exploiting Geometric and Intercept Theorems. Sensors 2018, 18, 895. [Google Scholar] [CrossRef]
- Wilson, J.; Patwari, N. Radio Tomographic Imaging with Wireless Networks. IEEE Trans. Mob. Comput. 2010, 9, 621–632. [Google Scholar] [CrossRef]
- Muñoz-Ferreras, J.M.; Gómez-García, R.; Li, C. Chapter 5—Human-aware localization using linear-frequency-modulated continuous-wave radars. In Principles and Applications of RF/Microwave in Healthcare and Biosensing; Li, C., Tofighi, M.R., Schreurs, D., Horng, T.S.J., Eds.; Academic Press: Cambridge, MA, USA, 2017; pp. 191–242. [Google Scholar] [CrossRef]
- Adib, F.; Hsu, C.Y.; Mao, H.; Katabi, D.; Durand, F. Capturing the Human Figure through a Wall. ACM Trans. Graph. 2015, 34, 1–3. [Google Scholar] [CrossRef]
- Sugino, K.; Katayama, S.; Niwa, Y.; Shiramatsu, S.; Ozono, T.; Shintani, T. A Bluetooth-Based Device-Free Motion Detector for a Remote Elder Care Support System. In Proceedings of the 2015 IIAI 4th International Congress on Advanced Applied Informatics, Okayama, Japan, 12–16 July 2015; pp. 91–96. [Google Scholar] [CrossRef]
- Sugino, K.; Niwa, Y.; Shiramatsu, S.; Ozono, T.; Shintani, T. Developing a human motion detector using bluetooth beacons and its applications. Inf. Eng. Express 2015, 1, 95–105. [Google Scholar] [CrossRef]
- Li, T.; An, C.; Tian, Z.; Campbell, A.T.; Zhou, X. Human Sensing Using Visible Light Communication. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 11 September 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 331–344. [Google Scholar] [CrossRef]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A Study of LoRa: Long Range Low Power Networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar] [CrossRef]
- Leonardi, L.; Lo Bello, L.; Battaglia, F.; Patti, G. Comparative Assessment of the LoRaWAN Medium Access Control Protocols for IoT: Does Listen before Talk Perform Better than ALOHA? Electronics 2020, 9, 553. [Google Scholar] [CrossRef]
- Chen, L.; Xiong, J.; Chen, X.; Lee, S.I.; Chen, K.; Han, D.; Fang, D.; Tang, Z.; Wang, Z. WideSee: Towards Wide-Area Contactless Wireless Sensing. In Proceedings of the 17th Conference on Embedded Networked Sensor Systems, New York, NY, USA, 10–13 November 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 258–270. [Google Scholar] [CrossRef]
- Remy, J.G.; Letamendia, C. LTE Standards and Architecture. In LTE Standards; John Wiley Sons, Ltd.: Hoboken, NJ, USA, 2014; Chapter 1; pp. 1–112. [Google Scholar] [CrossRef]
- Xu, S.; Tian, Y. Device-Free Motion Detection via On-the-Air LTE Signals. IEEE Commun. Lett. 2018, 22, 1934–1937. [Google Scholar] [CrossRef]
- Wang, Q.; Kakkavas, A.; Gong, X.; Stirling-Gallacher, R.A. Towards Integrated Sensing and Communications for 6G. arXiv 2022, arXiv:2201.04498. [Google Scholar]
- Münch, M.; Huffstadt, K.; Schleif, F. Towards a device-free passive presence detection system with Bluetooth Low Energy beacons. In Proceedings of the 27th European Symposium on Artificial Neural Networks, ESANN 2019, Bruges, Belgium, 24–26 April 2019. [Google Scholar]
- Münch, M.; Schleif, F.M. Device-Free Passive Human Counting with Bluetooth Low Energy Beacons. In Advances in Computational Intelligence, Proceedings of the 15th International Work-Conference on Artificial Neural Networks, IWANN 2019; Gran Canaria, Spain, 12–14 June 2019, Rojas, I., Joya, G., Catala, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 799–810. [Google Scholar] [CrossRef]
- Brockmann, F.; Figura, R.; Handte, M.; Marrón, P.J. RSSI Based Passive Detection of Persons for Waiting Lines Using Bluetooth Low Energy. In Proceedings of the 2018 International Conference on Embedded Wireless Systems and Networks, Madrid, Spain, 14–16 February 2018; pp. 102–113. [Google Scholar]
- Bluetooth SIG, Inc. Understanding Bluetooth Range. Available online: https://www.bluetooth.com/learn-about-bluetooth/key-attributes/range/ (accessed on 1 April 2022).
- Woolley, M. Understanding Reliability in Bluetooth Technology. Available online: https://www.bluetooth.com/wp-content/uploads/2020/10/EN-Understanding_Reliability.pdf (accessed on 1 April 2022).
- Zhang, M.; Xia, W.; Shen, L. Bluetooth Low Energy based motion sensing system. In Proceedings of the 2014 Sixth International Conference on Wireless Communications and Signal Processing (WCSP), Hefei, China, 23–25 October 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Woolley, M. Bluetooth Core Specification Version 5.0 Feature Enhancements. Available online: https://www.bluetooth.com/bluetooth-resources/bluetooth-5-go-faster-go-further/ (accessed on 1 April 2022).
- Woolley, M. Bluetooth Direction Finding: A Technical Overview. Available online: https://www.bluetooth.com/bluetooth-resources/bluetooth-direction-finding/ (accessed on 1 April 2022).
- Woolley, M. Bluetooth Core Specification Version 5.2 Feature Overview. Available online: https://www.bluetooth.com/wp-content/uploads/2020/01/Bluetooth_5.2_Feature_Overview.pdf (accessed on 1 April 2022).
- Woolley, M. Bluetooth Core Specification Version 5.3 Feature Enhancements. Available online: https://www.bluetooth.com/bluetooth-resources/bluetooth-core-specification-version-5-3-feature-enhancements/ (accessed on 1 April 2022).
- Faragher, R.; Harle, R.K. An Analysis of the Accuracy of Bluetooth Low Energy for Indoor Positioning Applications. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 201–210. [Google Scholar]
- Woyach, K.; Puccinelli, D.; Haenggi, M. Sensorless Sensing in Wireless Networks: Implementation and Measurements. In Proceedings of the International Symposium on Modeling and Optimization in Mobile, Ad Hoc and Wireless Networks, Boston, MA, USA, 26 February–2 March 2006; pp. 1–8. [Google Scholar] [CrossRef]
- Habaebi, M.; Rosli, R. RSSI-based Human Presence Detection System for Energy Saving Automation. Indones. J. Electr. Eng. Inform. 2017, 5, 339–350. [Google Scholar] [CrossRef][Green Version]
- Bulten, W.; Rossum, A.C.V.; Haselager, W.F.G. Human SLAM, Indoor Localisation of Devices and Users. In Proceedings of the 2016 IEEE First International Conference on Internet-of-Things Design and Implementation (IoTDI), Berlin, Germany, 4–8 April 2016; pp. 211–222. [Google Scholar] [CrossRef]
- Sabek, I.; Youssef, M.; Vasilakos, A.V. ACE: An Accurate and Efficient Multi-Entity Device-Free WLAN Localization System. IEEE Trans. Mob. Comput. 2015, 14, 261–273. [Google Scholar] [CrossRef]
- Kaufmann, J.; Schering, A. Analysis of Variance ANOVA. In Wiley StatsRef: Statistics Reference Online; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2014. [Google Scholar] [CrossRef]
- Alom, M.Z.; Taha, T.M.; Yakopcic, C.; Westberg, S.; Sidike, P.; Nasrin, M.S.; Hasan, M.; Van Essen, B.C.; Awwal, A.A.S.; Asari, V.K. A State-of-the-Art Survey on Deep Learning Theory and Architectures. Electronics 2019, 8, 292. [Google Scholar] [CrossRef]
- Abdull Sukor, A.S.; Kamarudin, L.M.; Zakaria, A.; Abdul Rahim, N.; Sudin, S.; Nishizaki, H. RSSI-Based for Device-Free Localization Using Deep Learning Technique. Smart Cities 2020, 3, 444–455. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Low, R.; Gunay, B.; Andersen, R.K.; Blessing, L. A scalable Bluetooth Low Energy approach to identify occupancy patterns and profiles in office spaces. Build. Environ. 2020, 171, 106681. [Google Scholar] [CrossRef]
- Beato Gutiérrez, M.E.; Sánchez, M.M.; Berjón Gallinas, R.; Fermoso García, A.M. Capacity Control in Indoor Spaces Using Machine Learning Techniques Together with BLE Technology. J. Sens. Actuator Netw. 2021, 10, 35. [Google Scholar] [CrossRef]
- Rahaman, M.S.; Pare, H.; Liono, J.; Salim, F.D.; Ren, Y.; Chan, J.; Kudo, S.; Rawling, T.; Sinickas, A. OccuSpace: Towards a Robust Occupancy Prediction System for Activity Based Workplace. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; pp. 415–418. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Keerthi, S.S.; Lin, C.J. Asymptotic Behaviors of Support Vector Machines with Gaussian Kernel. Neural Comput. 2003, 15, 1667–1689. [Google Scholar] [CrossRef]
- Albazrqaoe, W.; Huang, J.; Xing, G. A Practical Bluetooth Traffic Sniffing System: Design, Implementation, and Countermeasure. IEEE/ACM Trans. Netw. 2019, 27, 71–84. [Google Scholar] [CrossRef]
- Lee, J.; Park, C.; Roh, H. Revisiting Adaptive Frequency Hopping Map Prediction in Bluetooth with Machine Learning Classifiers. Energies 2021, 14, 928. [Google Scholar] [CrossRef]
- Mototolea, D.; Youssef, R.; Radoi, E.; Nicolaescu, I. Non-Cooperative Low-Complexity Detection Approach for FHSS-GFSK Drone Control Signals. IEEE Open J. Commun. Soc. 2020, 1, 401–412. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wireless Technology | Advantages | Disadvantages |
|---|---|---|
| RFID | Resilience to RF noise | Very short range |
| FMCW | High sensitivity; High distance resolution | Active approach; Ad hoc infrastructure |
| Bluetooth, BLE | Widespread use for communications; Low power consumption; Low deployment cost; Simultaneous communication and sensing | No support for CSI; Abrupt changes in RSSI due to FHSS |
| WiFi | Widely adopted for communications; High spatial resolution; Reliability | Not all devices provide CSI; Non-simultaneous communications and sensing; Relatively high deployment cost; Relatively high power consumption |
| VLC | Resilience to RF noise; Relatively cheap sensing devices | Complex ad hoc sensing infrastructure |
| LoRa | Long sensing range; Low power consumption | Active approach |
| LTE, 6G | Wide availability of the illuminating signal; Stability and reliability | Complex noise filtering and signal separation techniques; Severe privacy concerns |
| Application | Preprocessing | Classification/Regression Techniques | Accuracy |
|---|---|---|---|
| Presence detection [40] | - | Statistical techniques | |
| Presence detection [51] | Weighted Moving Avg. | RSSI-mean | |
| Motion detection [51] | Weighted Moving Avg. | RSSI-variance | |
| Presence detection [49] | -trimmed filter and normalization | Logistic Regression, KNN, SVN (linear, polynomial and RBF kernel) | |
| People counting [50] | -trimmed filter and normalization | Least Squares Regression, NN Regression, Support Vector Regression, Polynomial Regression | ±5.42 miscalculation 1 |
| Presence detection [18] | - | Neural Networks: MLP and RBF | (MLP) 91%, (RBF) 89% |
| Clean LoS detection [18] | - | Neural Networks: MLP and RBF | (MLP) 94%, (RBF) 92% clean LoS detection rate 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iannizzotto, G.; Milici, M.; Nucita, A.; Lo Bello, L. A Perspective on Passive Human Sensing with Bluetooth. Sensors 2022, 22, 3523. https://doi.org/10.3390/s22093523
Iannizzotto G, Milici M, Nucita A, Lo Bello L. A Perspective on Passive Human Sensing with Bluetooth. Sensors. 2022; 22(9):3523. https://doi.org/10.3390/s22093523
Chicago/Turabian StyleIannizzotto, Giancarlo, Miryam Milici, Andrea Nucita, and Lucia Lo Bello. 2022. "A Perspective on Passive Human Sensing with Bluetooth" Sensors 22, no. 9: 3523. https://doi.org/10.3390/s22093523
APA StyleIannizzotto, G., Milici, M., Nucita, A., & Lo Bello, L. (2022). A Perspective on Passive Human Sensing with Bluetooth. Sensors, 22(9), 3523. https://doi.org/10.3390/s22093523