
Application of C-LSTM Networks to Automatic Labeling of Vehicle Dynamic Response Data for Bridges


Abstract
:1. Introduction
2. Methodology
2.1. Labels for Driving on Bridges
2.2. C-LSTM Networks
3. Field Study
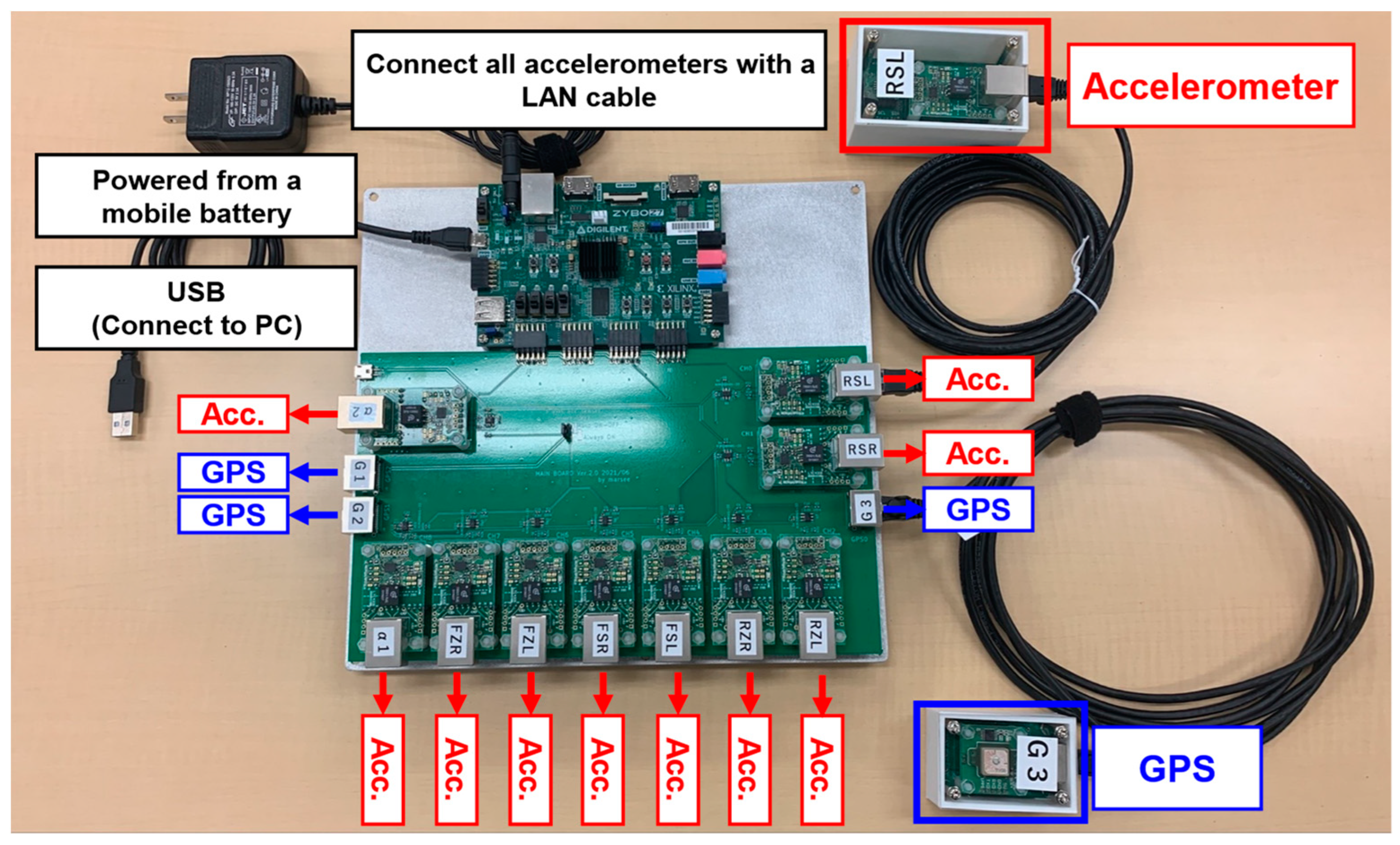
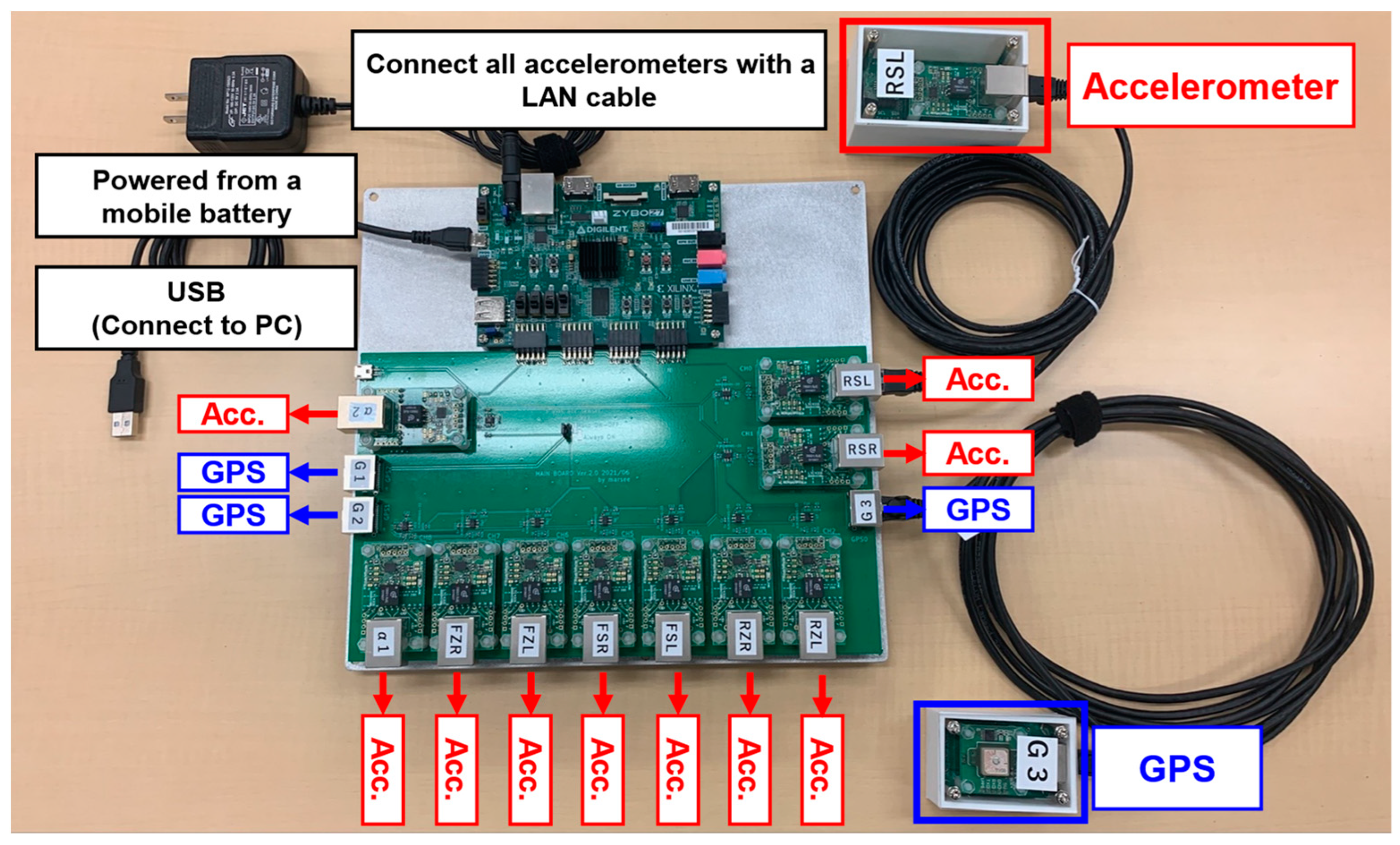
3.1. Experimental Setting
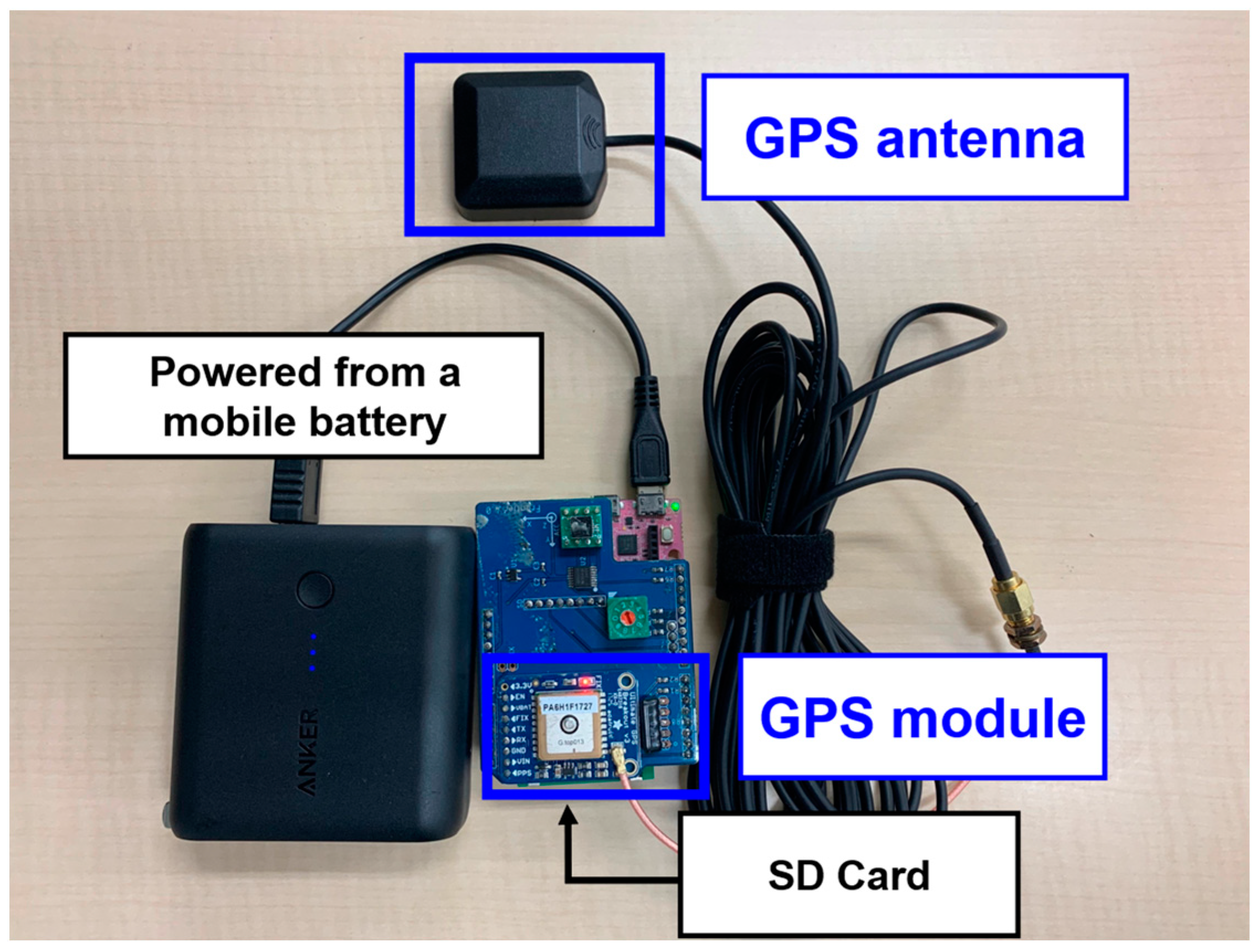
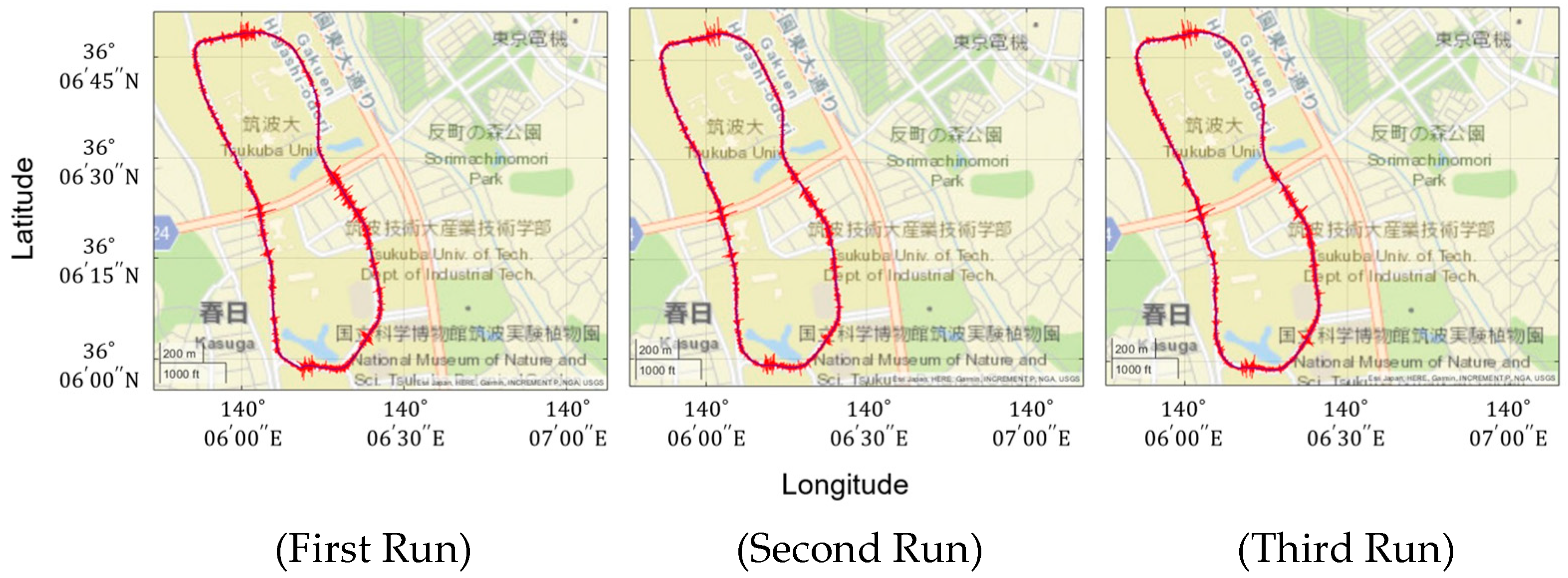
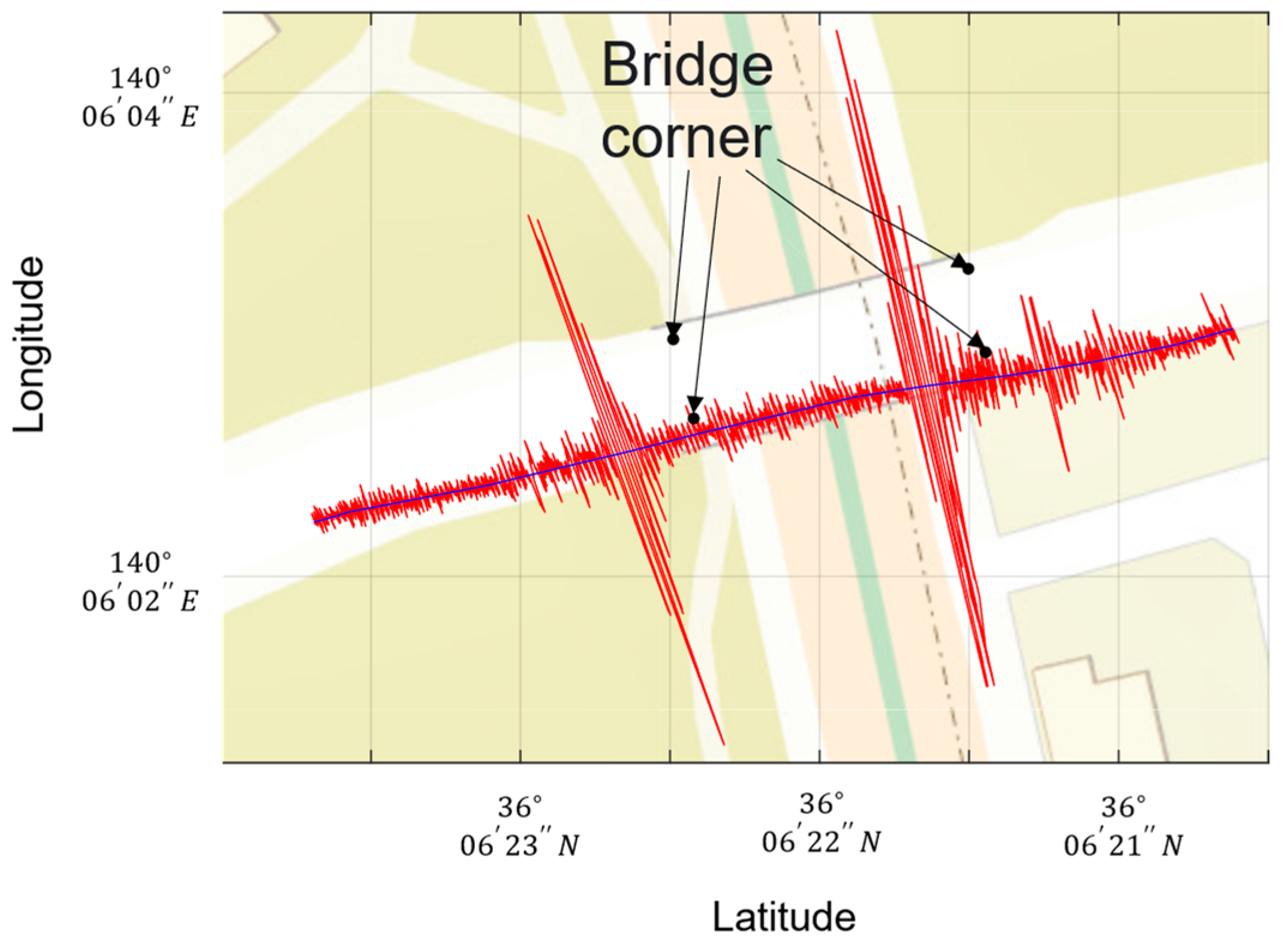
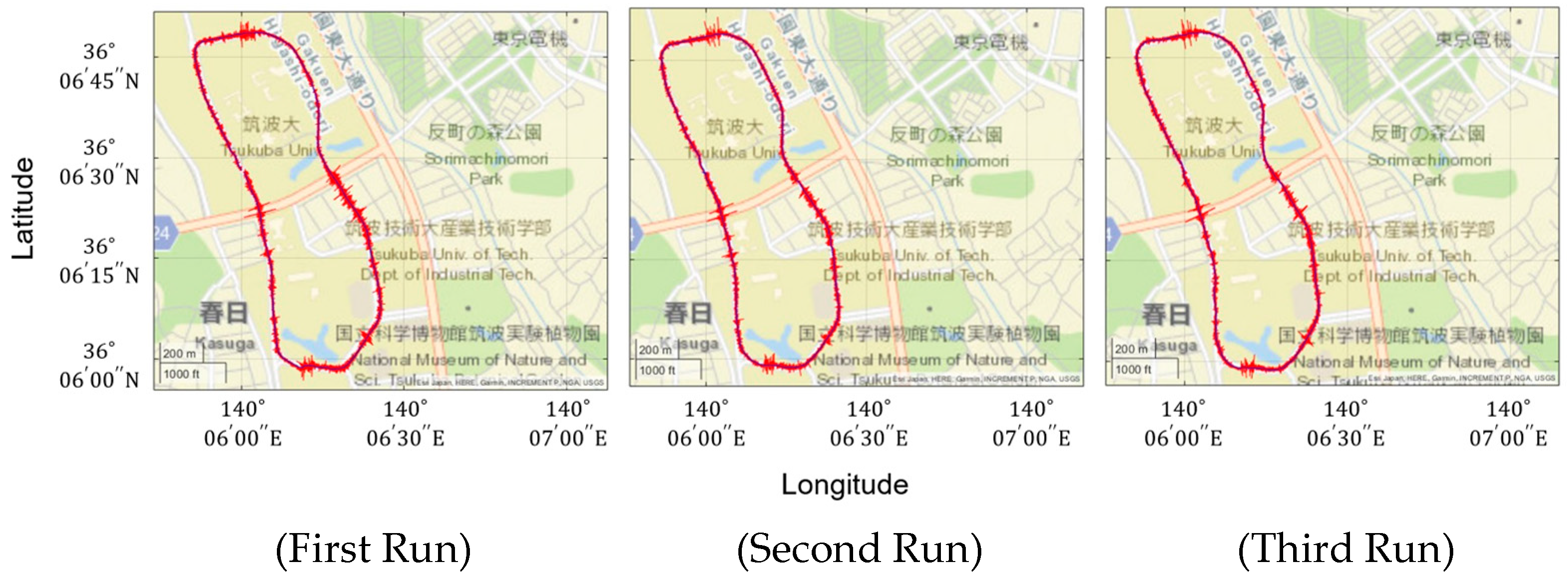
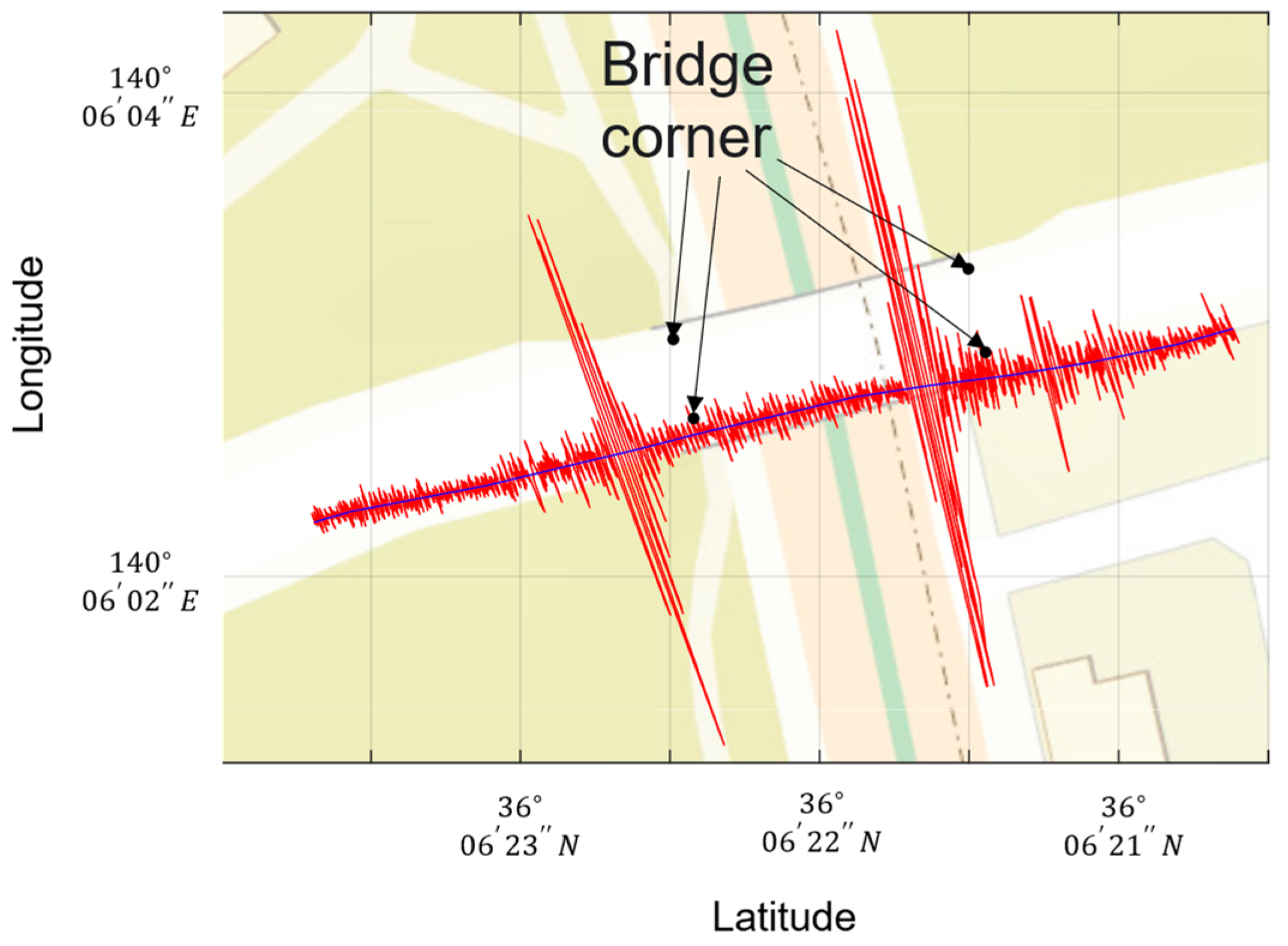
3.2. GPS Receiver for Bridges and Target Bridges
3.3. Bridge Description
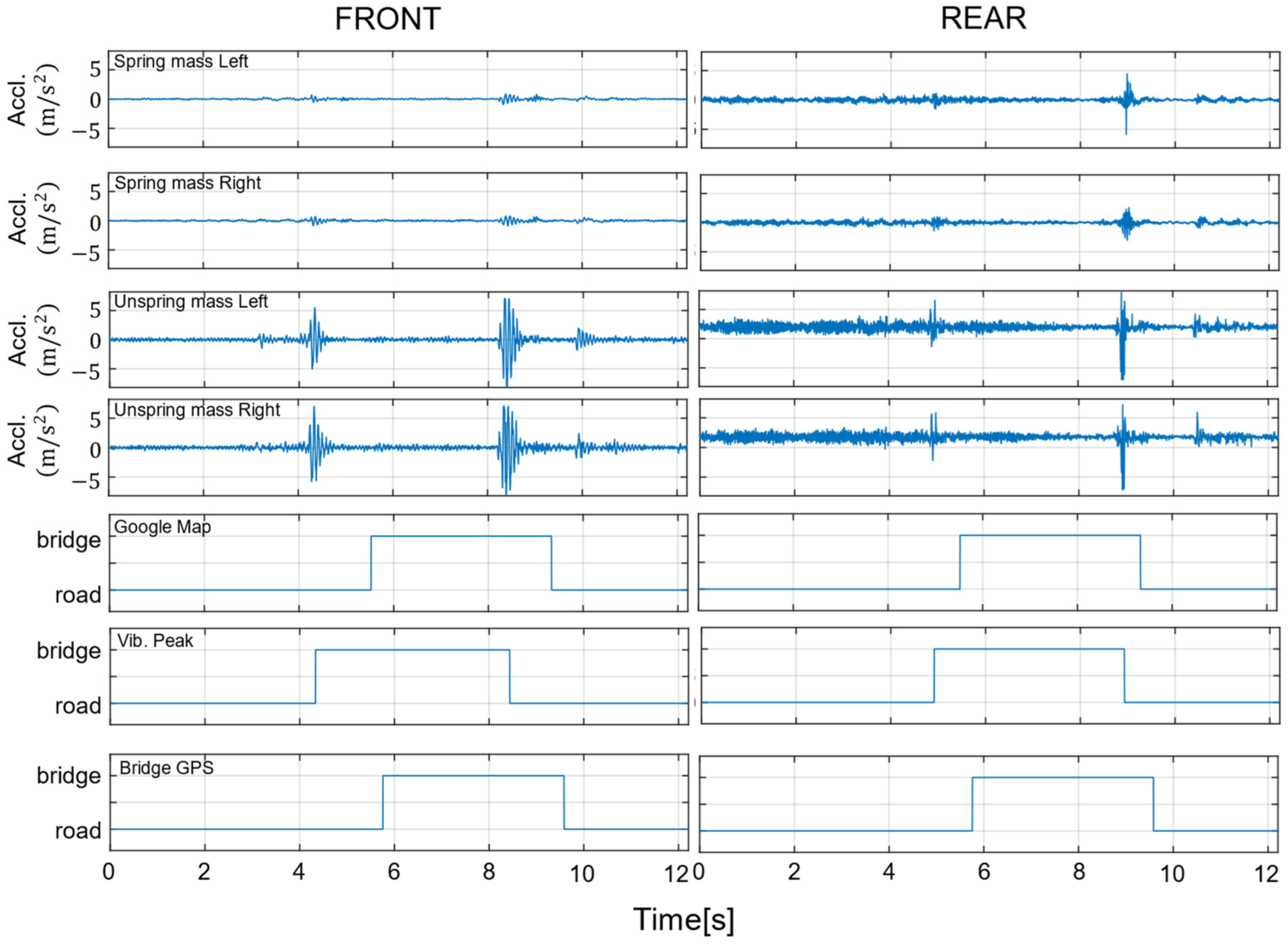
3.4. Preprocessing
4. Result and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, Y.B.; Lin, C.W.; Yau, J.D. Extracting bridge frequency from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Ling, C.W.; Yang, Y.B. Use of a passing vehicle to scan the fundamental bridge frequencies: An experimental verification. Eng. Struct. 2005, 27, 1865–1878. [Google Scholar]
- Yang, Y.B.; Chang, K.C. Extracting the bridge frequencies indirectly from a passing vehicle, Parametric study. Eng. Struct. 2009, 31, 2448–2459. [Google Scholar] [CrossRef]
- Yang, Y.B.; Chang, K.C. Extraction of bridge frequencies from the dynamic response of a passing vehicle enhanced by the EMD technique. J. Sound Vib. 2009, 322, 718–739. [Google Scholar] [CrossRef]
- Xiang, Z.; Dai, X.; Zhang, Y.; Lu, Q. The Tap-Scan Damage Detection Method for Beam Structures. Adv. Interact. Multiscale Mech. 2010, 4, 541–553. [Google Scholar]
- Nguyen, K.V.; Tran, H.T. Multi-cracks detection of a beam-like structure based on the on-vehicle vibration signal and wavelet analysis. J. Sound Vib. 2010, 329, 4455–4465. [Google Scholar] [CrossRef]
- Oshima, Y.; Yamamoto, K.; Sugiura, K. Damage assessment of a bridge based on mode shapes estimated by responses of passing vehicles. Smart Struct. Syst. 2014, 13, 731–753. [Google Scholar] [CrossRef]
- Takahashi, Y.; Yamamoto, K. The application of drive-by bridge damage detection based on continuous SSMA to the field experimental data. Int. J. Lifecycle Perform. Eng. 2019, 3, 310–330. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Golpayegani, F.; Moloney, C.; Clarke, S. A machine learning approach to bridge-damage detection using responses measured on a passing vehicle. Sensors 2019, 19, 4035. [Google Scholar] [CrossRef] [Green Version]
- Malekjafarian, A.; Moloney, C.; Golpayegani, F. Drive-by bridge health monitoring using multiple passes and machine learning. In Proceedings of the European Workshop on Structural Health Monitoring, EWSHM 2020, Palermo, Italy, 6–9 July 2020; Volume 127, pp. 695–703. [Google Scholar]
- Corbally, R.; Malekjafarian, A. Drive-by detection of midspan cracking and changing boundary conditions in bridges. In Proceedings of the 9th International Conference on Experimental Vibration Analysis for Civil Engineering Structures, EVACES 2021, Tokyo, Japan (online), 14–17 September 2021. [Google Scholar]
- Locke, W.; Sybrandt, J.; Redmond, L.; Safro, I.; Atamturktur, S. Using drive-by health monitoring to detect bridge damage considering environmental and operational effects. J. Sound Vib. 2020, 468, 115088. [Google Scholar] [CrossRef]
- Sarwar, M.Z.; Cantero, D. Deep autoencoder architecture for bridge damage assessment using responses from several vehicles. Eng. Struct. 2021, 246, 113064. [Google Scholar] [CrossRef]
- Malekjafarian, A.; McGetrick, P.J.; OBrien, E.J. A review of indirect bridge monitoring using passing vehicles. Shock Vib. 2015, 2015, 286139. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Nagayama, T.; Nakasuka, J.; Zhao, B.; Su, D. Extraction of bridge fundamental frequency from estimated vehicle excitation through a particle filter approach. J. Sound Vib. 2018, 428, 44–58. [Google Scholar] [CrossRef]
- Murai, R.; Miyamoto, R.; Yamamoto, K.; Okada, Y. Numerical Experiments of Bridge Position Estimation for On-Going Monitoring. In Proceedings of the World Congress on Engineering 2019, London, UK, 3–5 July 2019; pp. 474–479. [Google Scholar]
- Shin, R.; Okada, Y.; Yamamoto, K. Field Experiments and Predicting using C-LSTM Networks of Bridge Position Estimation. In Proceedings of the World Congress on Engineering 2021, Online, 7–9 July 2021; pp. 351–355. [Google Scholar]
- Donahue, J.; Anne, H.L.; Guadarrama, S.; Rohrbach, M.; Venugopalan, S.; Saenko, K.; Darrell, T. Long-term recurrent convolutional networks for visual recognition and description. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 2625–2634. [Google Scholar]
- Zhou, C.; Sun, C.; Liu, Z.; Lau, F. A C-LSTM neural network for text classification. arXiv 2015, arXiv:1511.08630. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Kim, T.Y.; Cho, S.B. Web traffic anomaly detection using C-LSTM neural networks. Expert Syst. Appl. 2018, 106, 66–76. [Google Scholar] [CrossRef]
- Kim, T.Y.; Cho, S.B. Predicting residential energy consumption using CNN-LSTM neural networks. Energy 2019, 182, 72–81. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, L.; Chen, C.; Li, Y.; Li, R.; Wang, G.; Jiang, S.; Zeng, Z. A hierarchical deep convolutional neural network and gated recurrent unit framework for structural damage detection. Inf. Sci. 2020, 540, 117–130. [Google Scholar] [CrossRef]
- Yang, J.; Yang, F.; Zhou, Y.; Wang, D.; Li, R.; Wang, G.; Chen, W. A data-driven structural damage detection framework based on parallel convolutional neural network and bidirectional gated recurrent unit. Inf. Sci. 2021, 566, 103–117. [Google Scholar] [CrossRef]
- Wang, H.; Nagayama, T.; Su, D. Estimation of dynamic tire force by measurement of vehicle body responses with numerical and experimental validation. Mech. Syst. Signal Process. 2019, 123, 369–385. [Google Scholar] [CrossRef]
- Yang, Y.B.; Xu, H.; Zhang, B.; Xiong, F.; Wang, Z.L. Measuring bridge frequencies by a test vehicle in non-moving and moving states. Eng. Struct. 2020, 203, 109859. [Google Scholar] [CrossRef]
- Yang, Y.; Lu, H.; Tan, X.; Chai, H.K.; Wang, R.; Zhang, Y. Fundamental mode shape estimation and element stiffness evaluation of girder bridges by using passing tractor-trailers. Mech. Syst. Signal Process. 2022, 169, 108746. [Google Scholar] [CrossRef]
- Locke, W.; Redmond, L.; Schmid, M. Experimental Evaluation of Drive-by Health Monitoring on a Short-Span Bridge Using OMA Techniques. In Proceedings of the IMAC XXXIX (39th)—2021 A Conference and Exposition on Structural Dynamics, Online, 7–10 February 2022; Volume 2, pp. 109–127. [Google Scholar]
- Zadehmohamad, M.; Bazaz, J.B.; Riahipour, R.; Farhangi, V. Physical modeling of the long-term behavior of integral abutment bridge backfill reinforced with tire-rubber. Int. J. Geo-Eng. 2021, 12, 36. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layers | Filter | Kernel Size | Stride |
|---|---|---|---|
| Convolution | 96 | 32 | 1 |
| Activation (ReLu) | - | - | - |
| MaxPooling | - | 4 | 1 |
| Convolution | 96 | 32 | 1 |
| Activation (ReLu) | - | - | - |
| MaxPooling | - | 4 | 1 |
| LSTM (200) | - | - | - |
| Activation (tanh) | - | - | - |
| Dense (2) | - | - | - |
| softmax | - | - | - |
| Bridge Name | Structure | Joint Type | Bridge Span (m) | Bridge Width (m) | Number of Runs |
|---|---|---|---|---|---|
| A | PC Concrete Box Girder | Rubber | 30.9 | 13.0 | 12 |
| B | PC Concrete T-Girder | Steel | 14.0 | 10.7 | 6 |
| C | Concrete | Rubber | 12.0 | 11.0 | 4 |
| D | RC Concrete I-Girder | None | 12.6 | 6.8 | 6 |
| E | RC Concrete Girder | Rubber | 14.0 | 6.6 | 5 |
| F | PC Concrete Girder | Rubber | 36.8 | 18.8 | 1 |
| G | Steel Girder | Rubber | 16.0 | 16.8 | 4 |
| Front Model | Rear Model | |||
|---|---|---|---|---|
| Train | Test | Train | Test | |
| None | 1.000 | 0.981 | 0.958 | 0.835 |
| High-pass Filter | 1.000 | 0.775 | 1.000 | 0.820 |
| Low-pass Filter | 1.000 | 0.970 | 1.000 | 0.855 |
| Band-pass Filter | 1.000 | 0.864 | 1.000 | 0.735 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, R.; Okada, Y.; Yamamoto, K. Application of C-LSTM Networks to Automatic Labeling of Vehicle Dynamic Response Data for Bridges. Sensors 2022, 22, 3486. https://doi.org/10.3390/s22093486
Shin R, Okada Y, Yamamoto K. Application of C-LSTM Networks to Automatic Labeling of Vehicle Dynamic Response Data for Bridges. Sensors. 2022; 22(9):3486. https://doi.org/10.3390/s22093486
Chicago/Turabian StyleShin, Ryota, Yukihiko Okada, and Kyosuke Yamamoto. 2022. "Application of C-LSTM Networks to Automatic Labeling of Vehicle Dynamic Response Data for Bridges" Sensors 22, no. 9: 3486. https://doi.org/10.3390/s22093486
APA StyleShin, R., Okada, Y., & Yamamoto, K. (2022). Application of C-LSTM Networks to Automatic Labeling of Vehicle Dynamic Response Data for Bridges. Sensors, 22(9), 3486. https://doi.org/10.3390/s22093486