
Estimating CO2 Emissions from IoT Traffic Flow Sensors and Reconstruction


Abstract
:1. Introduction
1.1. Literature Review
1.2. Paper Aim and Structure
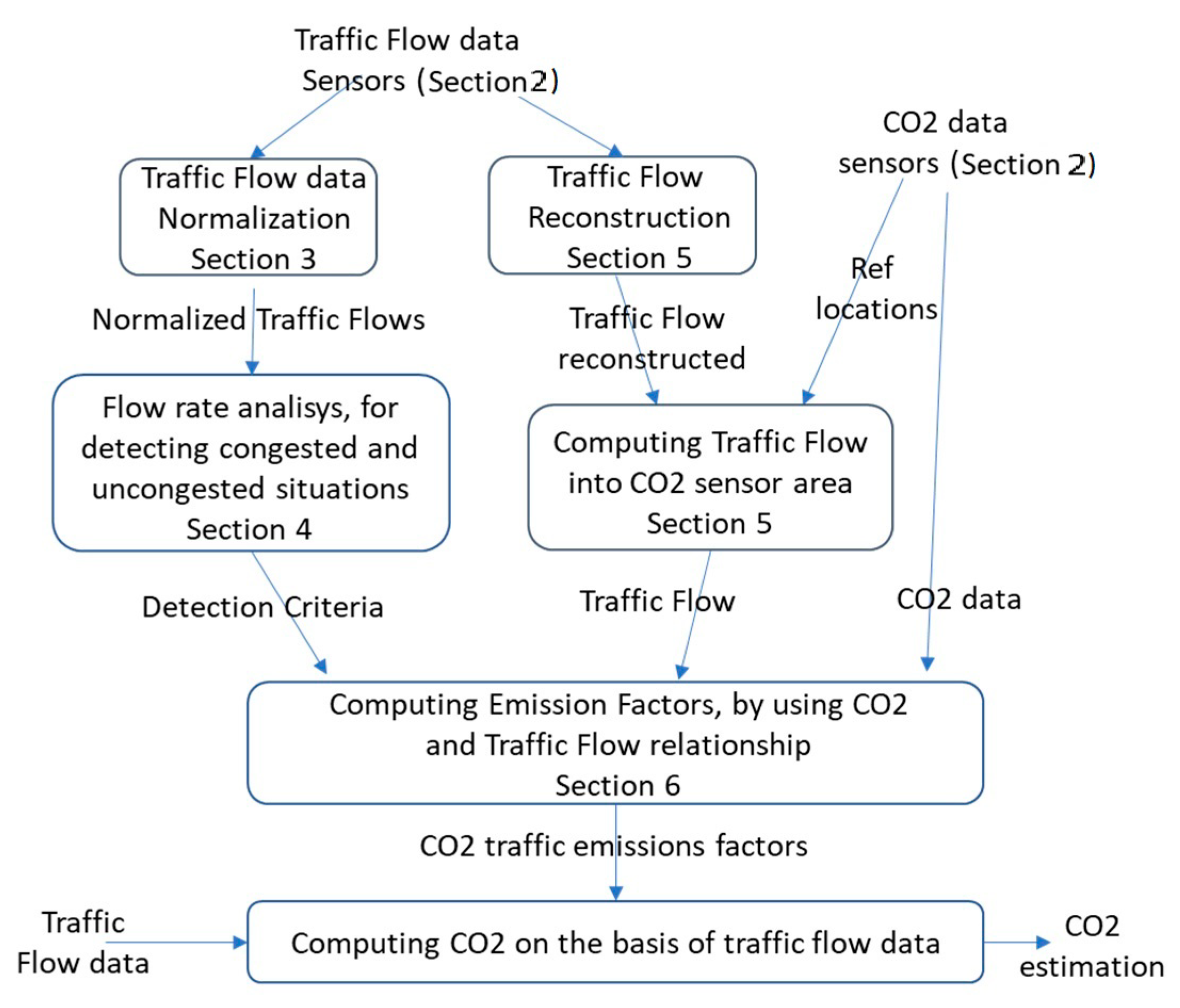
- Allows the CO2 produced by vehicles in a city to be estimated, which is a relevant contribution of CO2 produced in cities, directly measuring the impact of vehicle population on the production of CO2, thus increasing the precision in measuring CO2. The advantage of identifying the function from traffic flow to CO2 is that it can be used to estimate the CO2 in city areas based on knowing the traffic flow with a certain precision, and thus the total CO2 production of the city, which currently can only be coarsely guessed by using a very limited number of CO2 sensors, whereas most cities have hundreds of traffic flow sensors.
- Is based on (i) the identification of the relationships from the measured traffic flow and determining the emissions factors, taking into account different traffic behaviours, from fluid traffic to “stop-and-go” conditions (congested and uncongested traffic situations); (ii) the changes in the emissions factor at different periods of the year; (iii) an approach to statistical validation by means of the CO2 measurements taken from specific sensors and traffic flow data, allowing for an assessment of the precision of the indirect estimation of CO2 on the basis of traffic flow.
- Provides a solution for computing CO2 emissions locally in the city and not only for specific vehicles or globally at city level, as mentioned above in the literature review.
2. Data Description and Related Problems
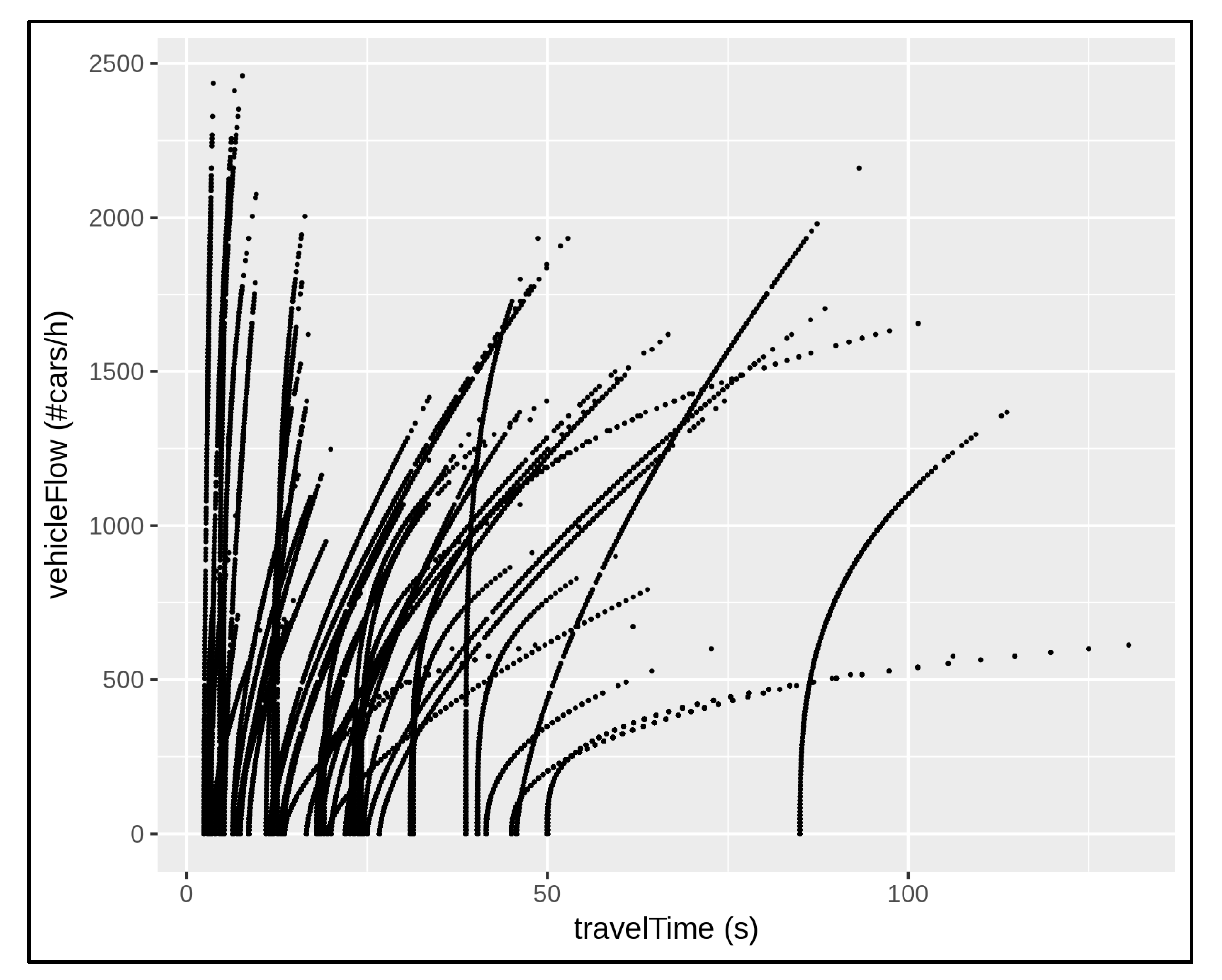
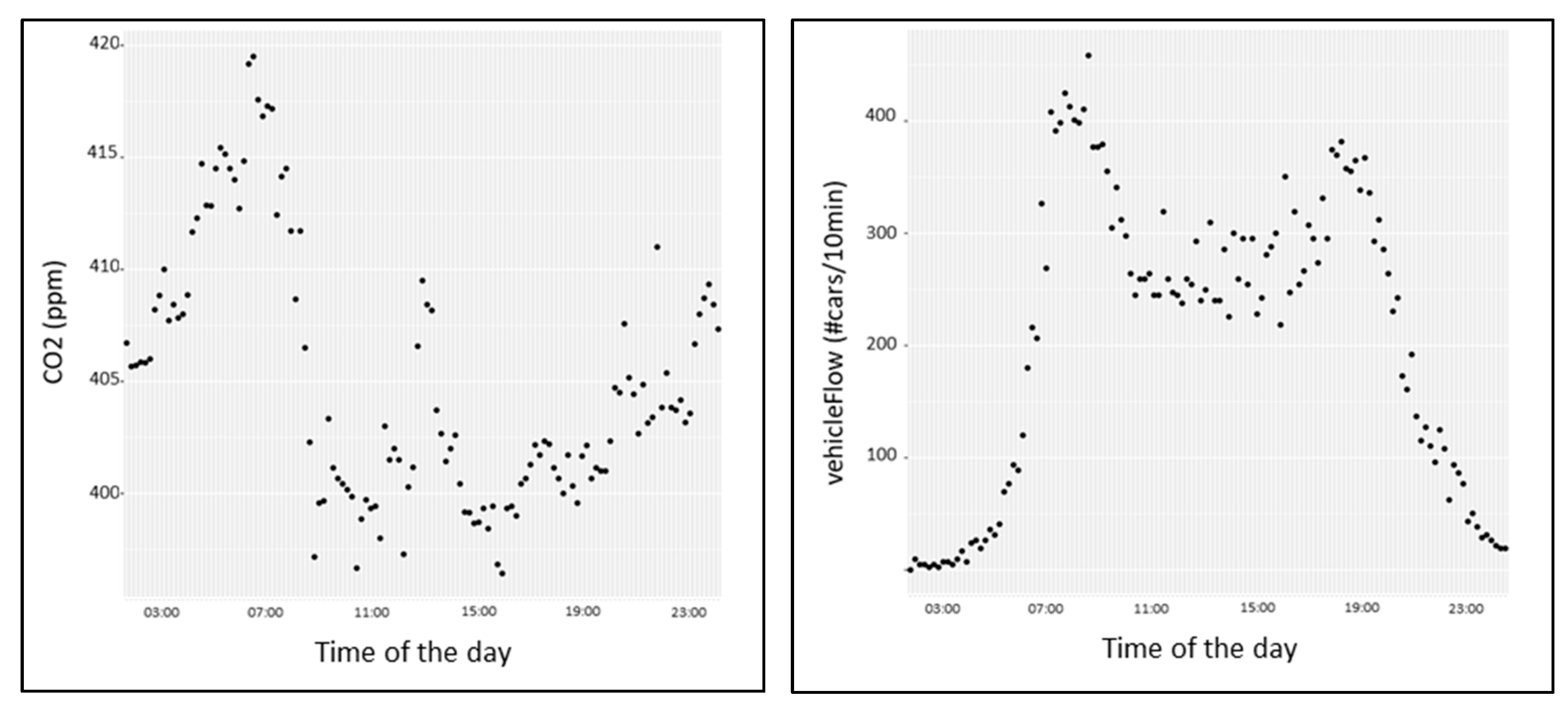
- Vehicular traffic flow: number of vehicles crossing the supervised location during a given period of time (which is usually referred to in terms of hours, that is, #cars/h);
- Vehicular average speed: average speed of the vehicles crossing the supervised location (measured in km/h);
- Vehicular density: number of vehicles in terms of road occupancy (measured in #cars/km).
- Travel time: average time that vehicles take to transit the supervised area (reported in s).
3. Traffic Flow Data Analysis
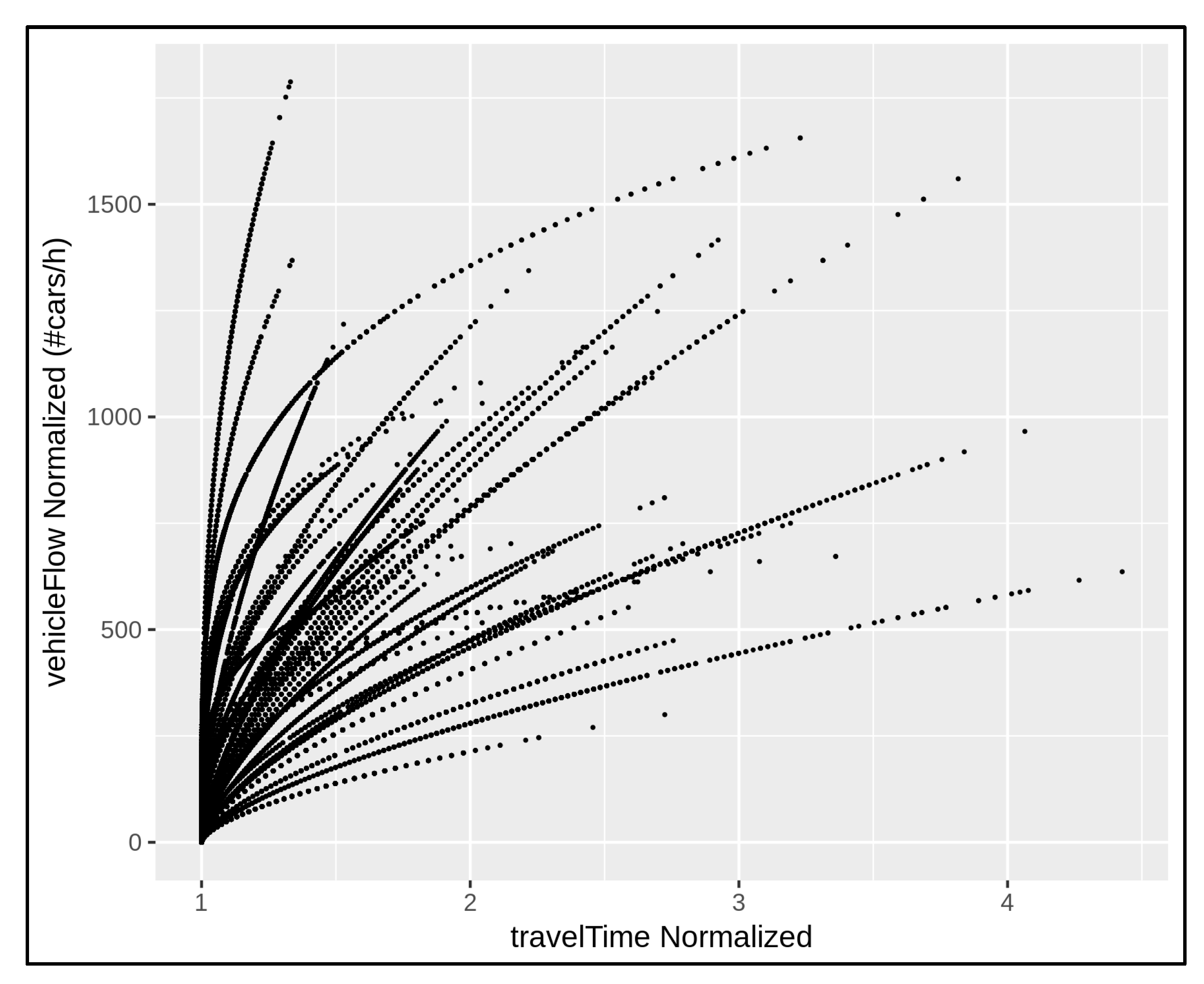
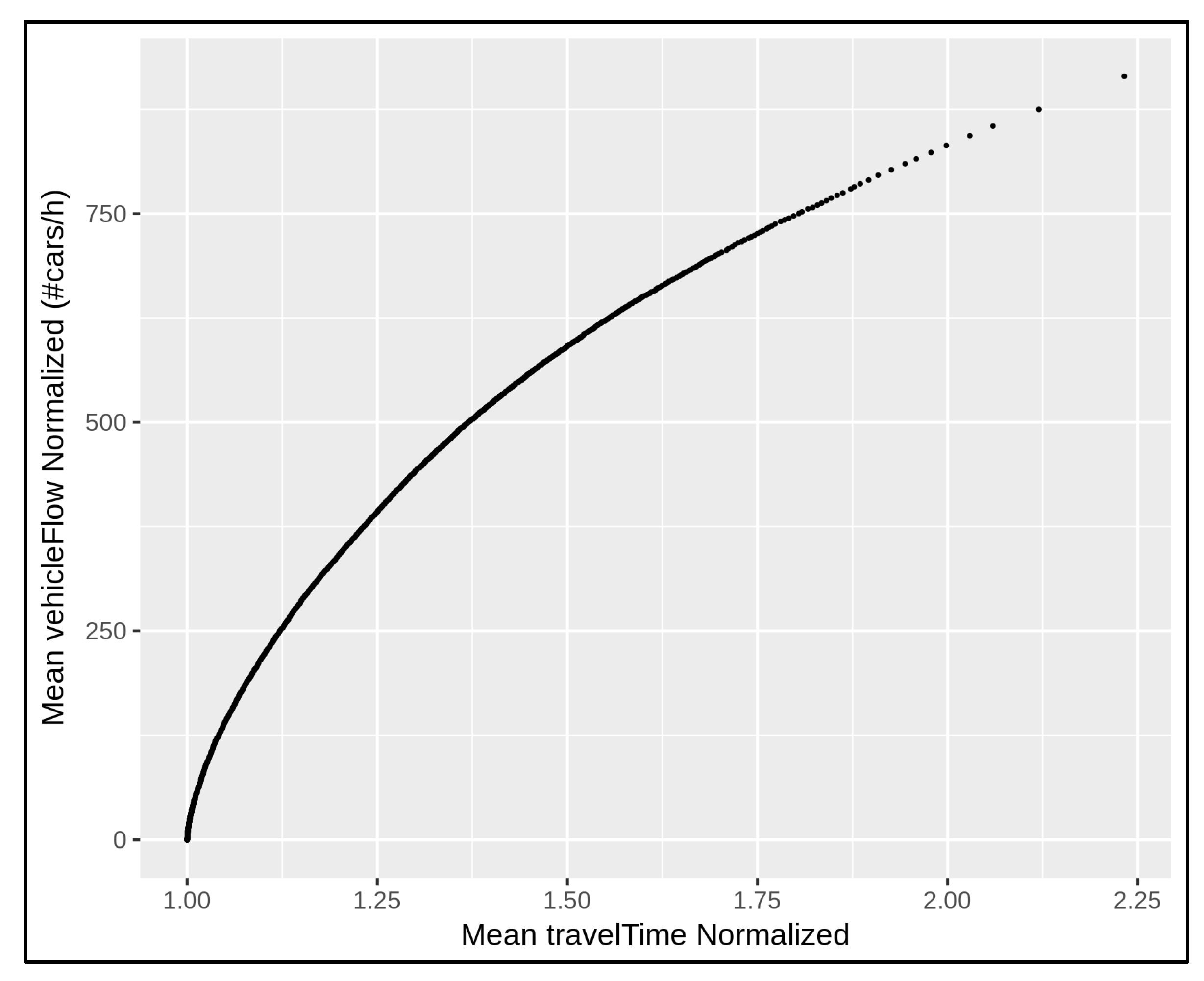
- Measured vehicular traffic flow, denoted by at a given timestamp , is normalized with respect to the number of lanes, denoted by , of the road of the location. Thus, the normalized vehicular traffic flow at a given timestamp , denoted by , is given by ;
- Measured travel time, denoted by at a given timestamp , is normalized with respect to the minimum travel time, denoted by , occurring in the absence of congestion in the sensor location. can be defined as the travel time needed to cross the area at the speed limit of the observed segment. Thus, the normalized travel time at a given timestamp , denoted by , is given by .
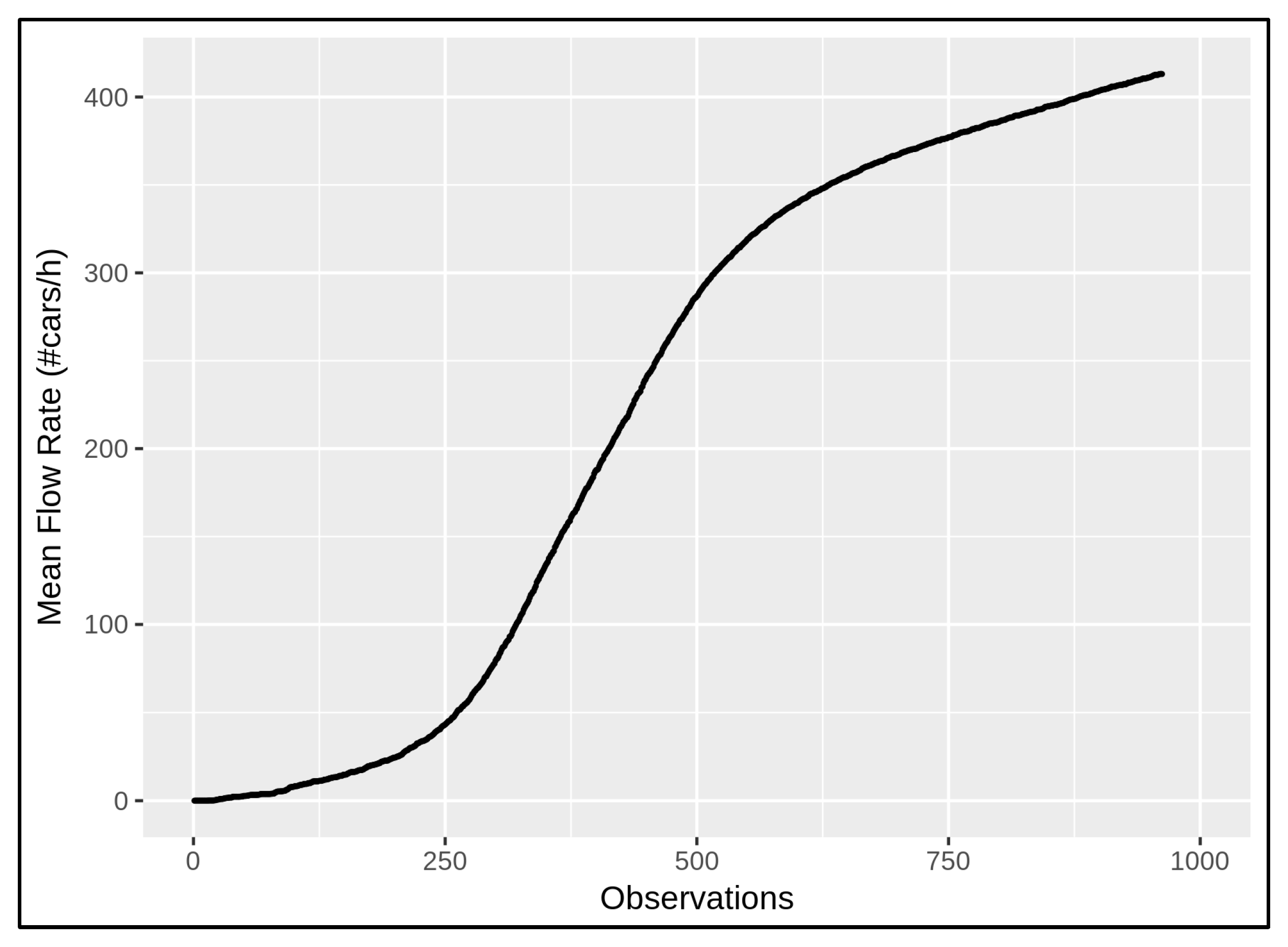
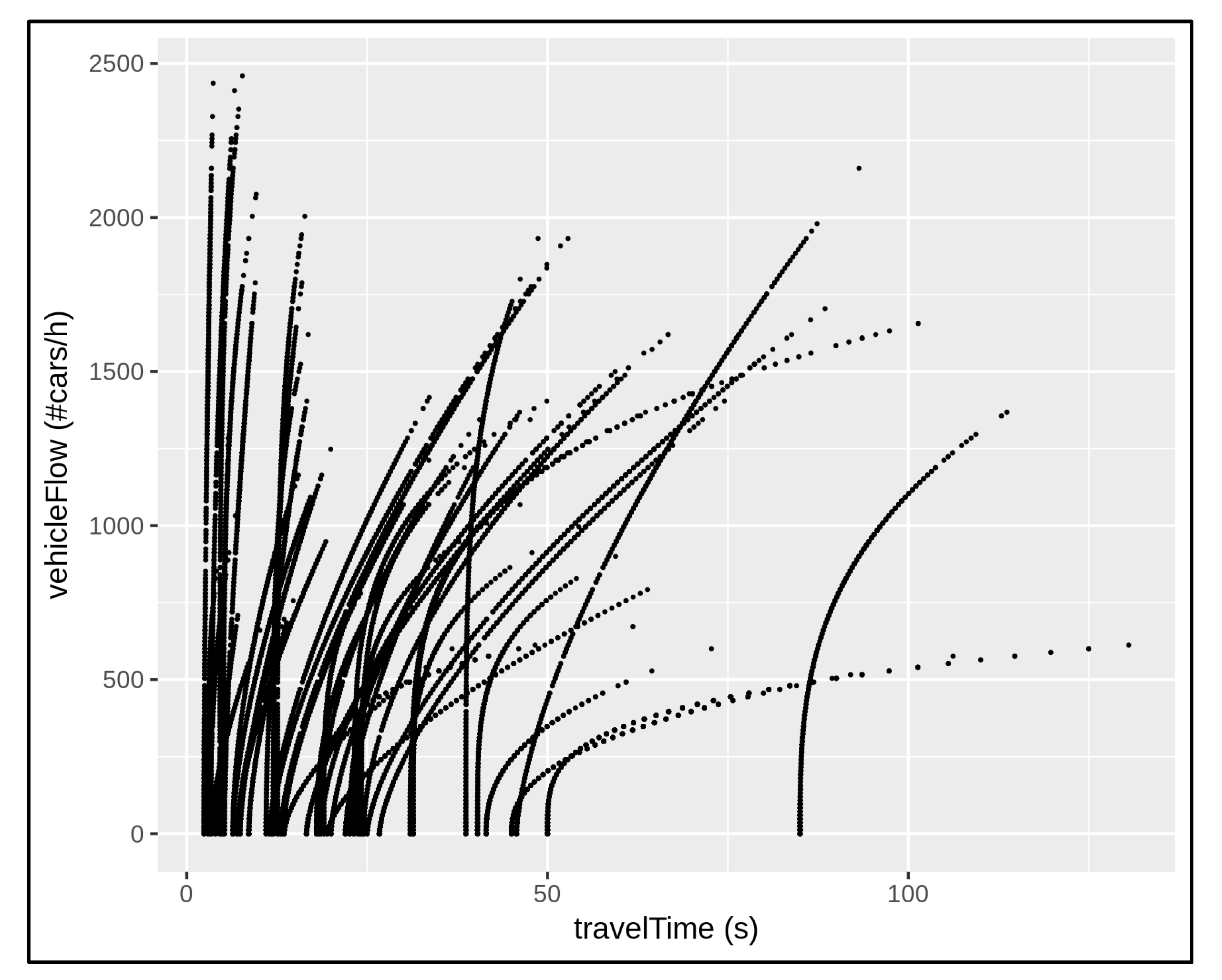
4. Traffic Flow Modalities: Congested and Uncongested
5. Traffic Flow Reconstruction into CO2 Sensor Locations
6. Computing CO2 Emissions Factors from Traffic Flow Data and Modalities
6.1. Time Alignment of Traffic Flow and Measured CO2 Data
6.2. Pollutant Data Type
6.3. From Traffic Flow Data to CO2
- is the amount of in a volumetric section of the road segment at a given time t, where:
- ○
- is the measurement of CO2 from the sensor in in the time interval (these values are measured by the CO2 sensors);
- ○
- is the area in which the sensor collects the values in and it is estimated on the road segments close to the CO2 sensor location. More precisely, we have:where is the number of lanes, is the width of the road lane, and is the height of the volume, which depends on the position of the CO2 sensor (typically at 3 m).
- ○
- is the road length corresponding to the amount of m or Km performed by the vehicles in that specific area of the CO2 sensor, supposing that the vehicles change neither road nor behaviour in the segment.
- Contribution coming from vehicles/cars moving in uncongested conditions:
- ○
- is the traffic count in uncongested conditions in terms of #cars in the time interval. This can be measured on the basis of traffic sensors and/or estimated as solutions of the above-presented LWR PDE via the traffic reconstruction model (Section 5);
- ○
- is an emissions factor to be determined, which is the amount of gCO2/km per car in uncongested conditions.
- Contribution coming from vehicles/cars moving in congested conditions:
- ○
- is the traffic count in congested conditions in terms of #cars in the time interval. This can be measured on the basis of traffic sensors and/or estimated as solutions of the above-presented LWR PDE via the traffic reconstruction model);
- ○
- is an emissions factor to be determined, which is the amount of gCO2/km per car in congested conditions.
- If , then and ;
- If , then and .
- is the traffic density (#cars/km) as observed on the traffic sensors and/or estimated as solutions of the above-presented LWR PDE via traffic flow reconstruction;
- is the number of road lanes;
- and are the average vehicular speeds in z-th location in the cases of uncongested and congested situations, respectively, if the specific velocity cannot be measured or reconstructed. For example, is the vehicular speed in the case of a traffic congestion situation, and we assume that the value of varies from 0 to 5 km/h in accordance with the road characteristics at the z-th location.
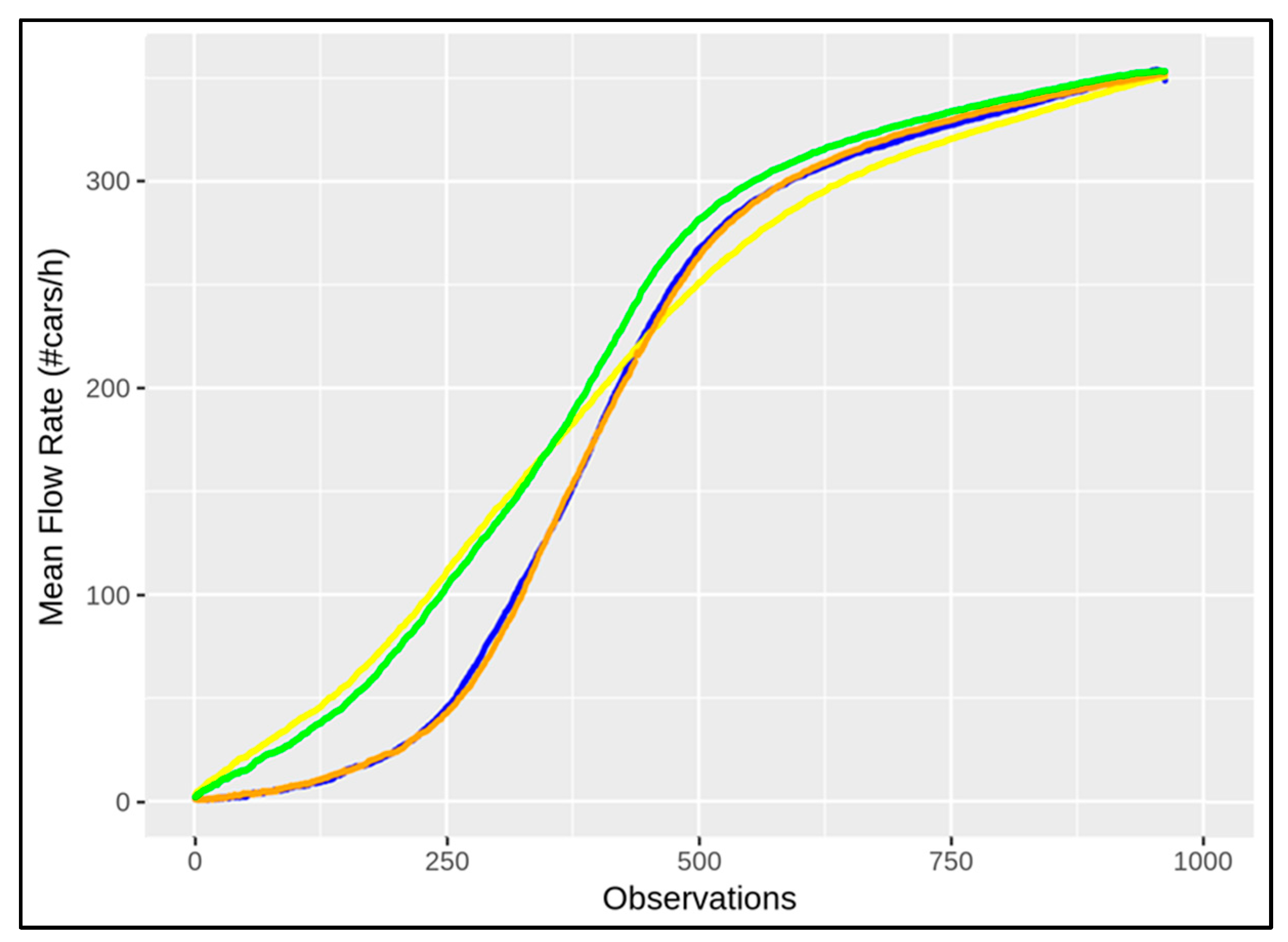
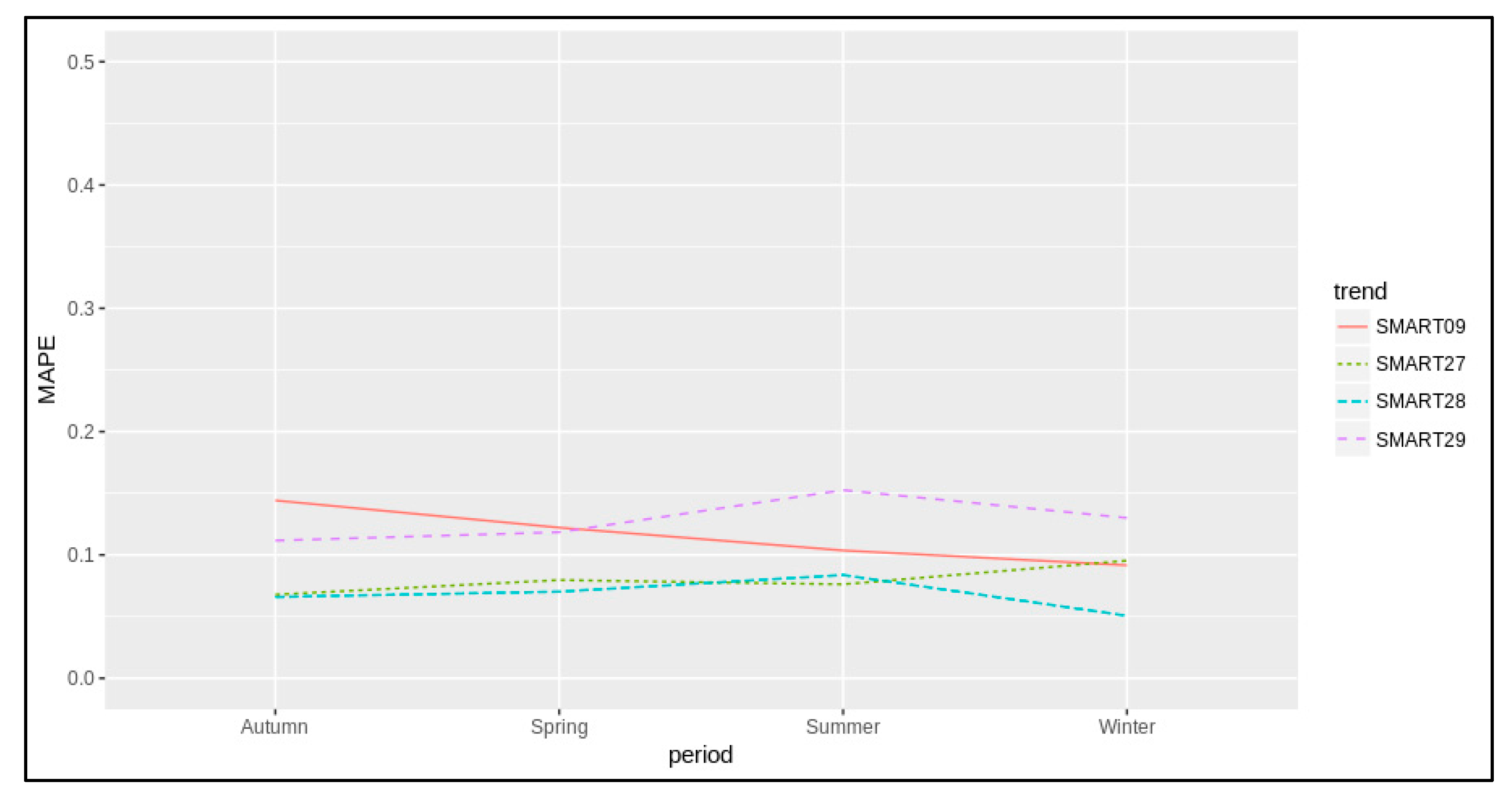
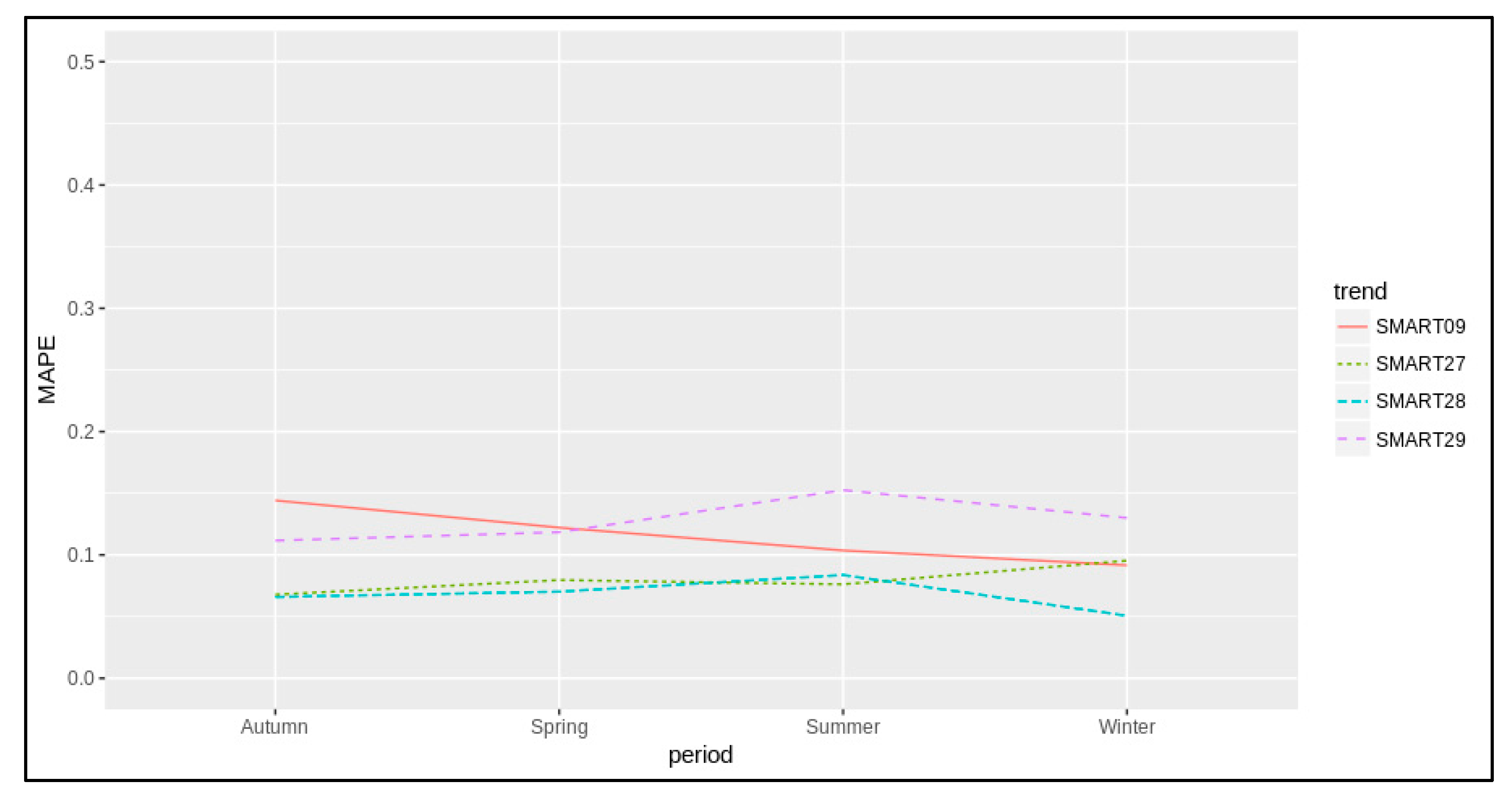
6.4. Assessing Seasonal Changes of Estimations: Experimental Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Badii, C.; Bilotta, S.; Cenni, D.; Difino, A.; Nesi, P.; Paoli, I.; Paolucci, M. High Density Real-Time Air Quality Derived Services from IoT Networks. Sensors 2020, 20, 5435. [Google Scholar] [CrossRef] [PubMed]
- Badii, C.; Bilotta, S.; Cenni, D.; Difino, A.; Nesi, P.; Paoli, I.; Paolucci, M. Real-Time Automatic Air Pollution Services from IOT Data Network. In Proceedings of the 2020 IEEE Symposium on Computers and Communications (ISCC), Rennes, France, 7–10 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Smit, R.; Ntziachristos, L.; Boulter, P. Validation of road vehicle and traffic emission models—A review and meta-analysis. Atmos. Environ. 2010, 44, 2943–2953. [Google Scholar] [CrossRef]
- Smit, R.; Poelman, M.; Schrijver, J. Improved road traffic emission inventories by adding mean speed distributions. Atmos. Environ. 2008, 42, 916–926. [Google Scholar] [CrossRef]
- Abou-Senna, H.; Radwan, E. VISSIM/MOVES integration to investigate the effect of major key parameters on CO2 emissions. Transp. Res. Part D Transp. Environ. 2013, 21, 39–46. [Google Scholar] [CrossRef]
- European Environment Agency. EMEP/EEA Air Pollutant Emission Inventory Guidebook 2019. Available online: https://www.eea.europa.eu/publications/emep-eea-guidebook-2019 (accessed on 27 April 2022).
- Todts, W. Transport & Environment, European Federation for Transport and Environment AISBL. 2018. Available online: https://www.transportenvironment.org/ (accessed on 27 April 2022).
- Zhu, C.; Dawei, G. A research on the factors influencing Carbon emission of transportation industry in “the Belt and Road Initiative” countries based on panel data. Energies 2019, 12, 2405. [Google Scholar] [CrossRef] [Green Version]
- Smit, R.; Brown, A.L.; Chan, Y.C. Do air pollution emissions and fuel consumption models for roadways include the effects of congestion in the roadway traffic flow? Environ. Model. Softw. 2008, 23, 1262–1270. [Google Scholar] [CrossRef]
- Madireddy, M.; De Coensel, B.; Can, A.; Degraeuwe, B.; Beusen, B.; De Vlieger, I.; Botteldooren, D. Assessment of the impact of speed limit reduction and traffic signal coordination on vehicle emissions using an integrated approach. Transp. Res. Part D Transp. Environ. 2011, 16, 504–508. [Google Scholar] [CrossRef] [Green Version]
- Grote, M.; Williams, I.; Preston, J.; Kemp, S. Including congestion effects in urban road traffic CO2 emissions modelling: Do Local Government Authorities have the right options? Transp. Res. Part D Transp. Environ. 2016, 43, 95–106. [Google Scholar] [CrossRef] [Green Version]
- Choudhary, A.; Gokhale, S. Urban real-world driving traffic emissions during interruption and congestion. Transp. Res. Part D Transp. Environ. 2016, 43, 59–70. [Google Scholar] [CrossRef]
- Fontaras, G.; Valverde, V.; Arcidiacono, V.; Tsiakmakis, S.; Anagnostopoulos, K.; Komnos, D.; Pavlovic, J.; Ciuffo, B. The development and validation of a vehicle simulator for the introduction of Worldwide Harmonized test protocol in the European light duty vehicle CO2 certification process. Appl. Energy 2018, 226, 784–796. [Google Scholar] [CrossRef]
- Zhao, H.-X.; He, R.-C.; Yin, N. Modeling of vehicle CO2 emissions and signal timing analysis at a signalized intersection considering fuel vehicles and electric vehicles. Eur. Transp. Res. Rev. 2021, 13, 5. [Google Scholar] [CrossRef]
- Gao, Y.; Hu, H. Estimation of queued vehicle emissions at signalized intersections based on vehicle specific power approach. China J. Highw. Transp. 2015, 28, 101–108. [Google Scholar]
- Vaccari, F.P.; Matese, A.; Gioli, B.; Zaldei, A.; Miglietta, F. Carbon Dioxide Emissions of the City Center of Firenze, Italy: Measurement, Evaluation, and Source Partitioning. J. Appl. Meteorol. Clim. 2009, 48, 1940–1947. [Google Scholar] [CrossRef]
- Nejadkoorki, F.; Nicholson, K.; Lake, I.; Davies, T. An approach for modelling CO2 emissions from road traffic in urban areas. Sci. Total Environ. 2008, 406, 269–278. [Google Scholar] [CrossRef] [PubMed]
- Transport Research Laboratory. UK Road Transport Emission Data; Transport Research Laboratory: Leeds, UK, 2005. [Google Scholar]
- Bellini, P.; Bilotta, S.; Cenni, D.; Collini, E.; Nesi, P.; Pantaleo, G.; Paolucci, M. Long Term Predictions of NO2 Average Values via Deep Learning. In Proceedings of the International Conference on Computational Science and Its Applications—ICCSA 2021, Cagliari, Italy, 13–16 September 2021; pp. 595–610. [Google Scholar] [CrossRef]
- Po, L.; Rollo, F.; Viqueira, J.R.R.; Lado, R.T.; Bigi, A.; Lopez, J.C.; Paolucci, M.; Nesi, P. TRAFAIR: Understanding Traffic Flow to Improve Air Quality. In Proceedings of the 2019 IEEE International Smart Cities Conference (ISC2), Casablanca, Morocco, 14–17 October 2019; pp. 36–43. [Google Scholar]
- Sii-Mobility, Italian National Mobility and Transport Action for Sustainable Mobility, Founded by MIUR. Available online: http://www.sii-mobility.org/ (accessed on 27 April 2022).
- Km4City Ontology, Knowledge Base 4 the City. Available online: https://www.km4city.org (accessed on 27 April 2022).
- Bellini, P.; Bilotta, S.; Cenni, D.; Nesi, P.; Paolucci, M.; Soderi, M. Knowledge Modeling and Management for Mobility and Transport Applications. In Proceedings of the 2018 IEEE 4th International Conference on Collaboration and Internet Computing (CIC), Philadelphia, PA, USA, 18–20 October 2018; Volume 1, pp. 364–371. [Google Scholar]
- Badii, C.; Belay, E.; Bellini, P.; Cenni, D.; Marazzini, M.; Mesiti, M.; Nesi, P.; Pantaleo, G.; Paolucci, M.; Valtolina, S.; et al. Snap4City: A Scalable IOT/IOE Platform for Developing Smart City Applications. In Proceedings of the 2018 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Guangzhou, China, 8–12 October 2018; pp. 2109–2116. [Google Scholar]
- Snap4City. Available online: https://www.snap4city.org (accessed on 27 April 2022).
- Bilotta, S.; Nesi, P. Traffic flow reconstruction by solving indeterminacy on traffic distribution at junctions. Future Gener. Comp. Syst. 2021, 114, 649–660. [Google Scholar] [CrossRef]
- Bellini, P.; Bilotta, S.; Nesi, P.; Paolucci, M.; Soderi, M. Real-Time Traffic Estimation of Unmonitored Roads. In Proceedings of the 2018 IEEE 16th Intl Conf on Dependable, Autonomic and Secure Computing, 16th Intl Conf on Pervasive Intelligence and Computing, 4th Intl Conf on Big Data Intelligence and Computing and Cyber Science and Technology Congress(DASC/PiCom/DataCom/CyberSciTech), Athens, Greece, 12–15 August 2018; pp. 935–942. [Google Scholar]
- Mott, R.L. Applied Fluid Mechanics; Prentice Hall: Hoboken, NJ, USA, 2006. [Google Scholar]
- Lighthill, M.J.; Whitham, G.B. On kinematic waves II. A theory of traffic flow on long crowded roads. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1955, 229, 317–345. [Google Scholar]
- Richards, P.I. Shock Waves on the Highway. Oper. Res. 1956, 4, 42–51. [Google Scholar] [CrossRef]
- Bretti, G.; Natalini, R.; Piccoli, B. A Fluid-Dynamic Traffic Model on Road Networks. Arch. Comput. Methods Eng. 2007, 14, 139–172. [Google Scholar] [CrossRef]
- Godunov, S.K. A finite difference method for the numerical computation of discontinuous solutions of the equations of fluid dynamics. Math. Sb. 1959, 47, 271–290. [Google Scholar]
- Kachroo, P.; Sastry, S. Travel Time Dynamics for Intelligent Transportation Systems: Theory and Applications. IEEE Trans. Intell. Transp. Syst. 2016, 17, 385–394. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean Flow Rate | 100 | 250 | 400 | 550 | 700 | 850 | 950 |
|---|---|---|---|---|---|---|---|
| October | 7.3 | 45.1 | 178.3 | 289.0 | 320.0 | 340.4 | 353.7 |
| July | 38.0 | 110.9 | 197.3 | 271.4 | 312.2 | 335.6 | 349.4 |
| abs. deviation | 30.7 | 65.8 | 19.0 | 17.5 | 7.7 | 4.8 | 4.2 |
| Polynomial Approx. | ||||
|---|---|---|---|---|
| MFR(Spring) | −0.0000011 | 0.0014465 | 0.0686048 | −17.38807 |
| FR(Spring,1) | −0.0000019 | 0.0027314 | −0.140624 | −9.454277 |
| FR(Spring,2) | −0.000001 | 0.0016093 | −0.247455 | 2.96993 |
| FR(Spring,3) | −0.0000019 | 0.002776 | −0.471167 | 11.87328 |
| Traffic Flow Sensors | Inflection Point (T-TH OBS) on | Flow Rate (#Cars/h) | Traffic Flow (#Cars/h) | Traffic Density (#Cars/Km) |
|---|---|---|---|---|
| All city sensors | 438 | 215.8 | 255 | 7.24 |
| S1 (near SMART27) | 479 | 366 | 366.88 | 7.12 |
| S2 (near SMART28) | 536 | 186.14 | 216 | 6.35 |
| S3 (near SMART29) | 487 | 234.24 | 240 | 4.21 |
| Winter | Autumn | |||||||
| Air Sensor | ||||||||
| SMART09 | 230.0 | 681.3 | 37.4 | 3.9 | 317.7 | 791.5 | 36.5 | 3.9 |
| SMART27 | 160.8 | 349.7 | 46.0 | 1.0 | 161.7 | 321.7 | 44.0 | 1.0 |
| SMART28 | 219.6 | 386.7 | 36.0 | 1.0 | 253.1 | 352.3 | 35.0 | 1.0 |
| SMART29 | 296.0 | 732.0 | 35.1 | 1.5 | 355.5 | 520.0 | 53.9 | 1.5 |
| MEAN | 226.6 | 537.4 | 38.6 | 1.8 | 272.0 | 496.3 | 42.3 | 1.8 |
| Summer | Spring | |||||||
| Air Sensor | ||||||||
| SMART09 | 184.0 | 709.4 | 39.8 | 3.9 | 217.8 | 619.2 | 35.2 | 3.9 |
| SMART27 | 133.6 | 323.3 | 53.2 | 1.0 | 150.4 | 317.5 | 51.5 | 1.0 |
| SMART28 | 290.3 | 383.2 | 36 | 1.0 | 274.0 | 381.5 | 34.0 | 1.0 |
| SMART29 | 264.5 | 643.7 | 46.9 | 1.5 | 315.3 | 589.6 | 57.0 | 1.5 |
| MEAN | 218.1 | 514.9 | 43.9 | 1.8 | 239.3 | 476.9 | 44.4 | 1.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bilotta, S.; Nesi, P. Estimating CO2 Emissions from IoT Traffic Flow Sensors and Reconstruction. Sensors 2022, 22, 3382. https://doi.org/10.3390/s22093382
Bilotta S, Nesi P. Estimating CO2 Emissions from IoT Traffic Flow Sensors and Reconstruction. Sensors. 2022; 22(9):3382. https://doi.org/10.3390/s22093382
Chicago/Turabian StyleBilotta, Stefano, and Paolo Nesi. 2022. "Estimating CO2 Emissions from IoT Traffic Flow Sensors and Reconstruction" Sensors 22, no. 9: 3382. https://doi.org/10.3390/s22093382
APA StyleBilotta, S., & Nesi, P. (2022). Estimating CO2 Emissions from IoT Traffic Flow Sensors and Reconstruction. Sensors, 22(9), 3382. https://doi.org/10.3390/s22093382