
Gridless Underdetermined Direction of Arrival Estimation in Sparse Circular Array Using Inverse Beamspace Transformation


Abstract
:1. Introduction
- 1.
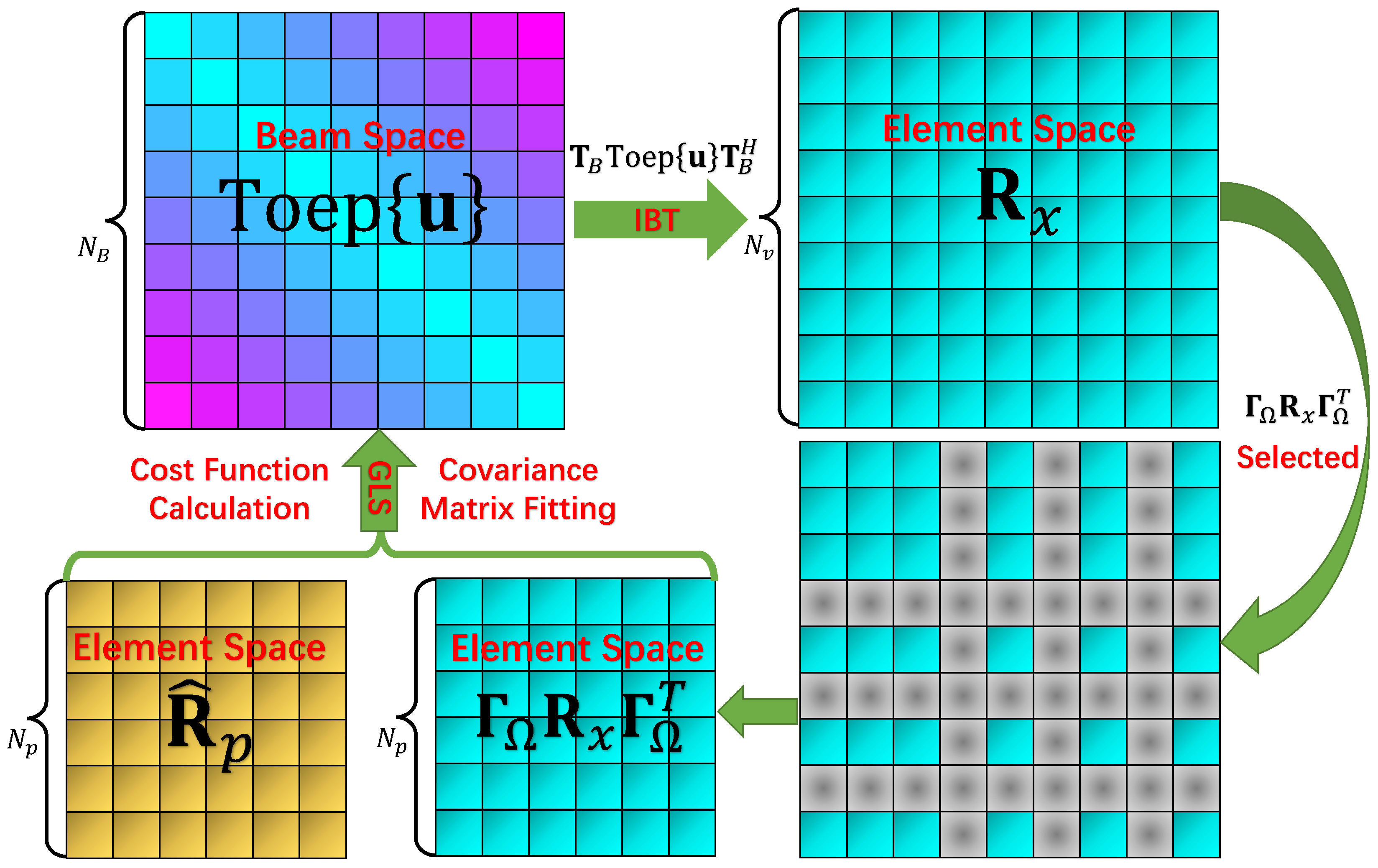
- We propose an inverse beam space transformation (IBT) of the Toeplitz matrix in SCA scenario. The missing elements in the sample covariance of SCA are completed;
- 2.
- A gridless hyperparameter-free algorithm is proposed to cope with the underdetermined DOA estimation problem in SCA. The efficient outstanding Root-MUSIC method based on the completed covariance matrix can be adopted;
- 3.
- Numerical simulations are performed under various scenarios to evaluate the proposed GSCA (Gridless DOA Estimation in Sparse Circular Array) algorithm.
2. System Model
2.1. Signal Model for SCA
2.2. Covariance Matrix Recovery with GLS
2.3. Inverse Beamspace Transformation (IBT) of SCA
3. Proposed Algorithm GSCA
| Algorithm 1: Proposed Algorithm: GSCA |
Input: , N , , D , R , , Output: Estimated DOAs Step 1: Calculate via (6), Step 2: Calculate via (25), Step 3: If , perform (31) ; Else , perform (32), Step 4: Formulate , and calculate its EVD via (34), Step 6: Return DOAs via (41). |
4. Simulation Results
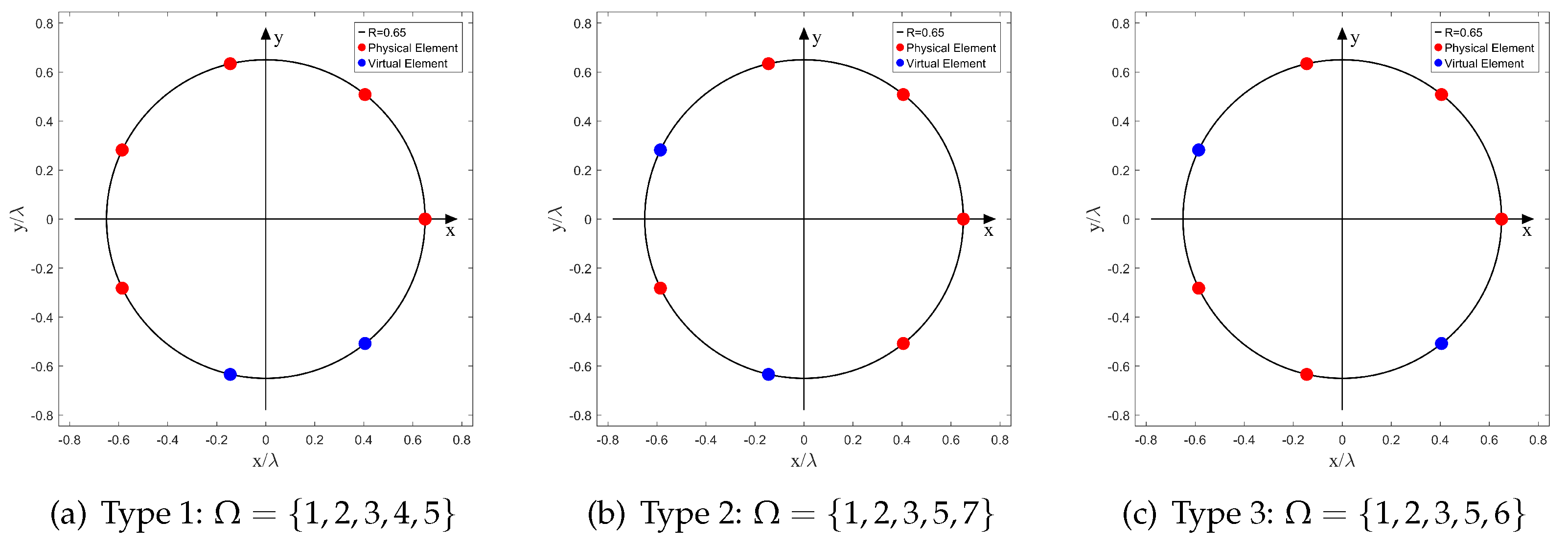
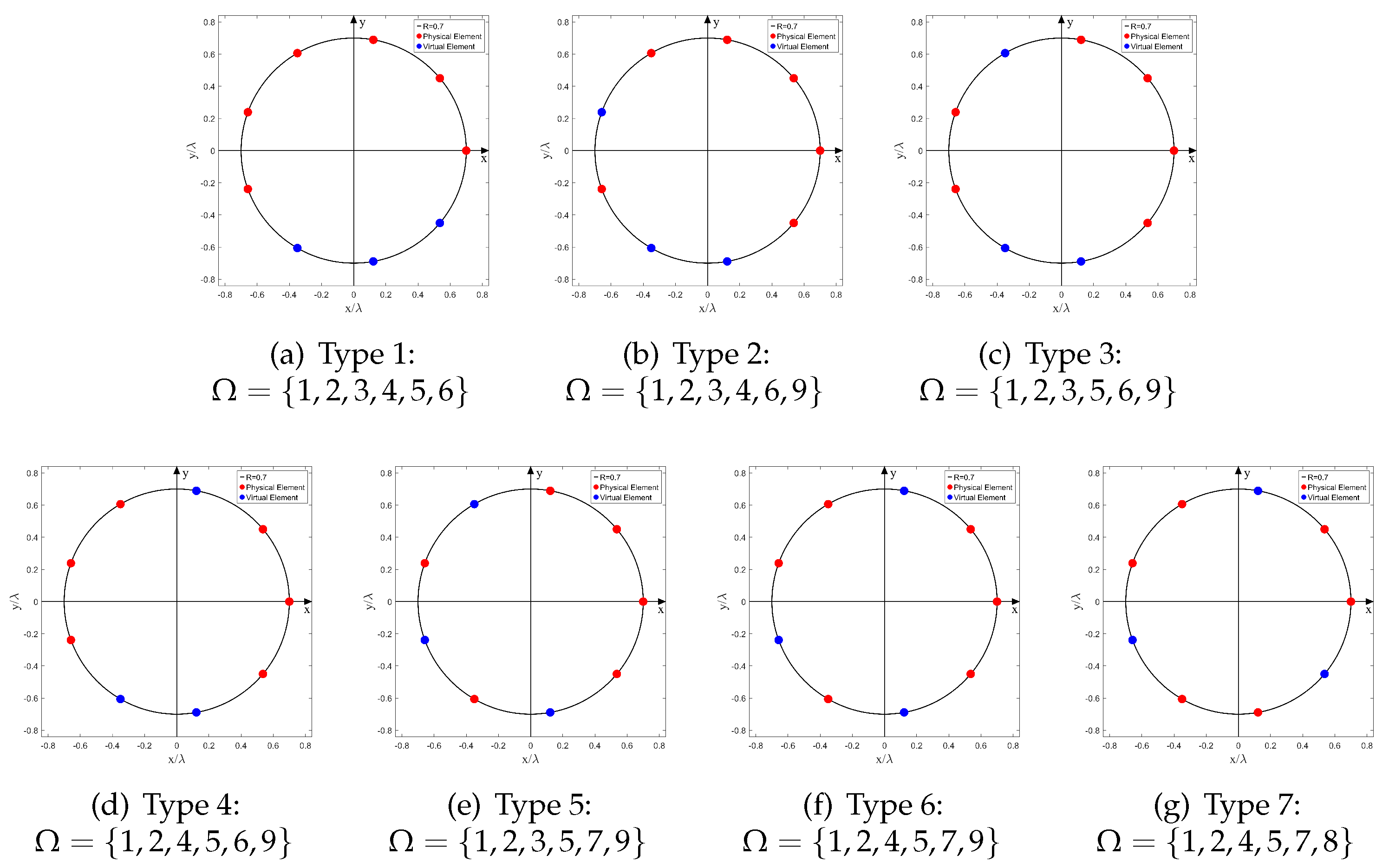
4.1. Selection of N, and
4.2. Effects of SNR and K: ,
4.3. Effects of SNR and K: ,
4.4. Complexity Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DOA | Direction of Arrival |
| SCA | Sparse Circular Array |
| UCA | Uniform Circular Array |
| MUSIC | Multiple Signal Classification |
| ESPRIT | Estimation of Signal Parameters via Rotational Invariance Techniques |
| ML | Maximum Likelihood |
| MIMO | Multi-in Multi-out |
| UAV | Unmanned Aerial Vehicle |
| SLA | Sparse Linear Array |
| NSLA | Nested Sparse Linear Array |
| NSCA | Nested Sparse Circular Array |
| ANM | Atomic Norm Minimization |
| EMaC | Enhanced Matrix Completion |
| SPICE | Sparse Iterative Covariance-based Estimator |
| GLS | Gridless-SPICE |
| BT | Beamspace Transformation |
| IBT | Inverse Beamspace Transformation |
| SDP | Semidefinite Problem |
| GSCA | Gridless DOA Estimation in Sparse Circular Array (Proposed Algorithm) |
| EVD | Eigenvalue Decomposition |
| RMSE | Root-Mean-Square-Error |
References
- Lee, H.; Ahn, J.; Kim, Y.; Chung, J. Direction-of-Arrival Estimation of Far-Field Sources Under Near-Field Interferences in Passive Sonar Array. IEEE Access 2021, 9, 28413–28420. [Google Scholar] [CrossRef]
- Blasone, G.P.; Colone, F.; Lombardo, P.; Wojaczek, P.; Cristallini, D. Passive Radar STAP Detection and DoA Estimation Under Antenna Calibration Errors. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2725–2742. [Google Scholar] [CrossRef]
- Wen, F.; Liang, C. Improved Tensor-MODE Based Direction-of-Arrival Estimation for Massive MIMO Systems. IEEE Commun. Lett. 2015, 19, 2182–2185. [Google Scholar] [CrossRef]
- Brossard, M.; El Korso, M.N.; Pesavento, M.; Boyer, R.; Larzabal, P.; Wijnholds, S.J. Parallel multi-wavelength calibration algorithm for radio astronomical arrays. Signal Process. 2018, 145, 258–271. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Stoica, P.; Sharman, K. Maximum likelihood methods for direction-of-arrival estimation. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1132–1143. [Google Scholar] [CrossRef]
- Sun, B.; Wu, C.; Shi, J.; Ruan, H.L.; Ye, W.Q. Direction-of-arrival estimation under array sensor failures with ULA. IEEE Access 2019, 8, 26445–26456. [Google Scholar] [CrossRef]
- Zhu, C.; Wang, W.Q.; Chen, H.; So, H.C. Impaired sensor diagnosis, beamforming, and DOA estimation with difference co-array processing. IEEE Sens. J. 2015, 15, 3773–3780. [Google Scholar] [CrossRef]
- Qin, Y.; Liu, Y.; Liu, J.; Yu, Z. Underdetermined wideband DOA estimation for off-grid sources with coprime array using sparse Bayesian learning. Sensors 2018, 18, 253. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Z.; Huang, Y.; Wang, W.Q.; So, H.C. Augmented covariance matrix reconstruction for DOA estimation using difference coarray. IEEE Trans. Signal Process. 2021, 69, 5345–5358. [Google Scholar] [CrossRef]
- Vaidyanathan, P.P.; Pal, P. Theory of Sparse Coprime Sensing in Multiple Dimensions. IEEE Trans. Signal Process. 2011, 59, 3592–3608. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Nested Arrays: A Novel Approach to Array Processing With Enhanced Degrees of Freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.L.; Vaidyanathan, P.P. Super nested arrays: Sparse arrays with less mutual coupling than nested arrays. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 2976–2980. [Google Scholar] [CrossRef] [Green Version]
- He, D.; Chen, X.; Pei, L.; Zhu, F.; Jiang, L.; Yu, W. Multi-BS spatial spectrum fusion for 2-D DOA estimation and localization using UCA in massive MIMO system. IEEE Trans. Instrum. Meas. 2020, 70, 1–13. [Google Scholar] [CrossRef]
- Yang, B.; Huang, M.; Xie, Y.; Wang, C.; Rong, Y.; Huang, H.; Duan, T. Classification Method of Uniform Circular Array Radar Ground Clutter Data Based on Chaotic Genetic Algorithm. Sensors 2021, 21, 4596. [Google Scholar] [CrossRef]
- Guo, J.; Ahmad, I.; Chang, K. Classification, positioning, and tracking of drones by HMM using acoustic circular microphone array beamforming. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 1–19. [Google Scholar] [CrossRef]
- Jiang, G.; Mao, X.P.; Liu, Y.T. Underdetermined DOA Estimation via Covariance Matrix Completion for Nested Sparse Circular Array in Nonuniform Noise. IEEE Signal Process. Lett. 2020, 27, 1824–1828. [Google Scholar] [CrossRef]
- Yin, J.; Chen, T. Direction-of-arrival estimation using a sparse representation of array covariance vectors. IEEE Trans. Signal Process. 2011, 59, 4489–4493. [Google Scholar] [CrossRef]
- Zhao, D.; Tan, W.; Deng, Z.; Li, G. Low complexity sparse beamspace DOA estimation via single measurement vectors for uniform circular array. EURASIP J. Adv. Signal Process. 2021, 2021, 1–20. [Google Scholar] [CrossRef]
- Si, W.; Wang, Y.; Zhang, C. Three-Parallel Co-Prime Polarization Sensitive Array for 2-D DOA and Polarization Estimation via Sparse Representation. IEEE Access 2019, 7, 15404–15413. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P. Hourglass Arrays and Other Novel 2-D Sparse Arrays With Reduced Mutual Coupling. IEEE Trans. Signal Process. 2017, 65, 3369–3383. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Xie, L. Enhancing Sparsity and Resolution via Reweighted Atomic Norm Minimization. IEEE Trans. Signal Process. 2016, 64, 995–1006. [Google Scholar] [CrossRef]
- Pan, J.; Jiang, F. Low complexity beamspace super resolution for DOA estimation of linear array. Sensors 2020, 20, 2222. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Y.; Chi, Y. Robust Spectral Compressed Sensing via Structured Matrix Completion. IEEE Trans. Inf. Theroy 2014, 60, 6576–6601. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Xie, L. On Gridless Sparse Methods for Line Spectral Estimation From Complete and Incomplete Data. IEEE Trans. Signal Process. 2015, 63, 3139–3153. [Google Scholar] [CrossRef] [Green Version]
- Mathews, C.; Zoltowski, M. Eigenstructure techniques for 2-D angle estimation with uniform circular arrays. IEEE Trans. Signal Process. 1994, 42, 2395–2407. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, S.; Yu, Z.; Guang, X. A robust direction of arrival estimation method for uniform circular array. Sensors 2019, 19, 4427. [Google Scholar] [CrossRef] [Green Version]
- Yadav, S.K.; George, N.V. Underdetermined Direction-of-Arrival Estimation Using Sparse Circular Arrays on a Rotating Platform. IEEE Signal Process. Lett. 2021, 28, 862–866. [Google Scholar] [CrossRef]
- Stoica, P.; Babu, P.; Li, J. SPICE: A sparse covariance-based estimation method for array processing. IEEE Trans. Signal Process. 2010, 59, 629–638. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, L.; Zhang, C. A Discretization-Free Sparse and Parametric Approach for Linear Array Signal Processing. IEEE Trans. Signal Process. 2014, 62, 4959–4973. [Google Scholar] [CrossRef] [Green Version]
- Rao, B.; Hari, K. Performance analysis of Root-Music. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 1939–1949. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. A Grid-Less Approach to Underdetermined Direction of Arrival Estimation Via Low Rank Matrix Denoising. IEEE Signal Process. Lett. 2014, 21, 737–741. [Google Scholar] [CrossRef]
- Toh, K.C.; Todd, M.J.; Tütüncü, R.H. SDPT3—A MATLAB software package for semidefinite programming, version 1.3. Optim. Method Softw. 1999, 11, 545–581. [Google Scholar] [CrossRef]
- Yang, Z.; Li, J.; Stoica, P.; Xie, L. Sparse methods for direction-of-arrival estimation. In Academic Press Library in Signal Processing, Volume 7; Elsevier: Amsterdam, The Netherlands, 2018; pp. 509–581. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Array Geometry Scenario | Core Method | Others |
|---|---|---|---|
| Yin et al. [19] | ULA Determined | Sparse Representation of Array Covariance Vectors | Grid |
| Zhao et al. [20] | UCA Determined | BT; Sparse Representation of Array Covariance Vectors | Grid |
| Jiang et al. [18] | Nested SCA Underdetermined | Sparse Representation of Array Covariance Vectors | Grid |
| Yadav et al. [30] | Rotate SCA Underdetermined | Sparse Representation of Array Covariance Vectors | Grid |
| Our Work | SCA Underdetermined | IBT; Covariance Matrix Recovery with GlS | Gridless |
| (a) N = 7, SNR = 15 dB, K = 1024 | ||||||
| 3 | 4 | 5 | 6 | |||
| Results | Failed | Failed | Success | Success | ||
| (b) N = 9, SNR = 15 dB, K = 1024 | ||||||
| 4 | 5 | 6 | 7 | 8 | ||
| Results | Failed | Failed | Success | Success | Success | |
| (c) N = 11, SNR = 15 dB, K = 1024 | ||||||
| 5 | 6 | 7 | 8 | 9 | 10 | |
| Results | Failed | Failed | Success | Success | Success | Success |
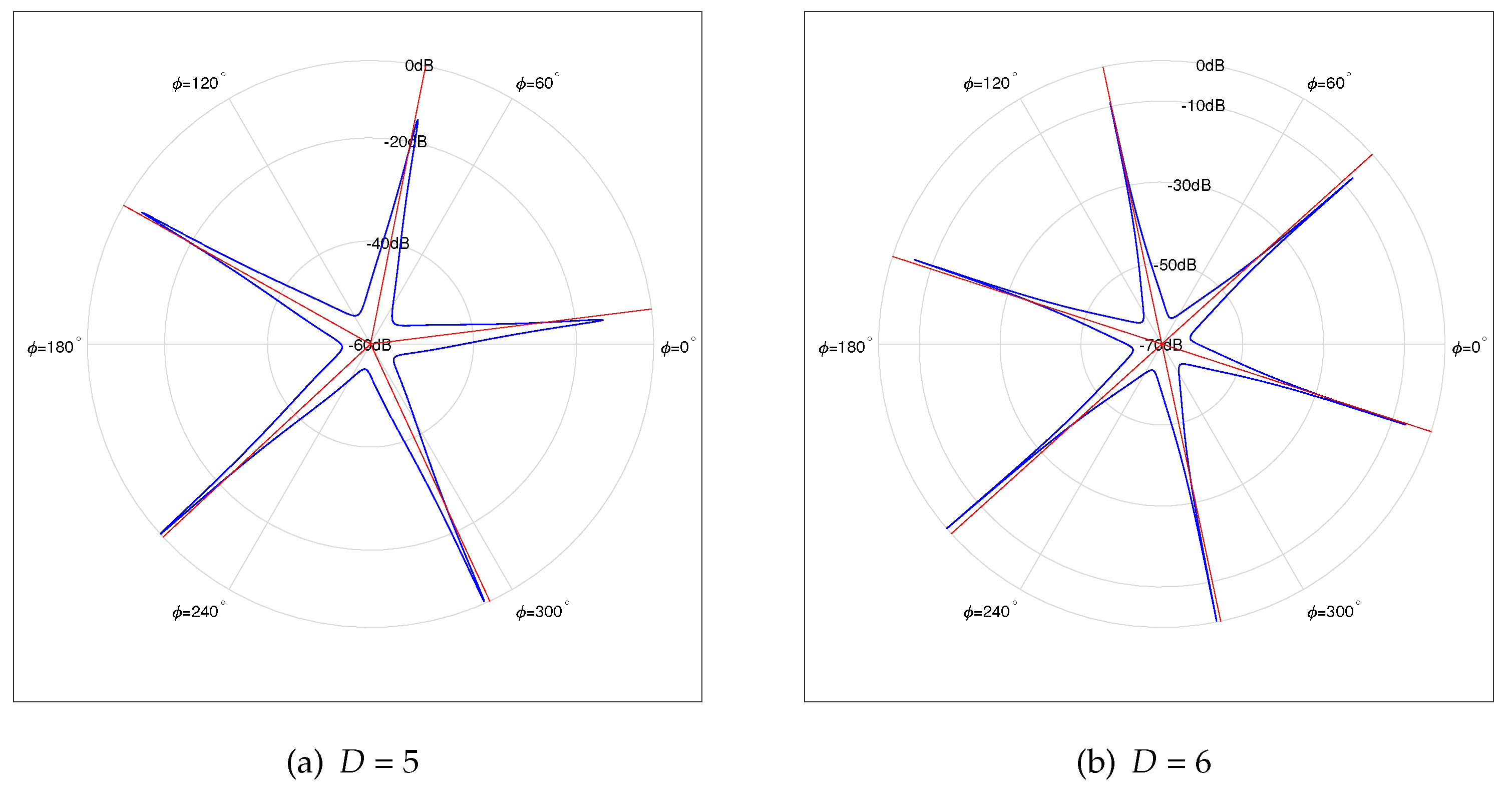
| (a) , Various | (b) , Various | |||||
| D | 5 | 6 | D | 6 | 7 | 8 |
| Time (s) | 2.902 | 2.918 | Time (s) | 3.102 | 3.084 | 3.195 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Y.; Huang, Y.; Zhang, X.; Tang, X. Gridless Underdetermined Direction of Arrival Estimation in Sparse Circular Array Using Inverse Beamspace Transformation. Sensors 2022, 22, 2864. https://doi.org/10.3390/s22082864
Tian Y, Huang Y, Zhang X, Tang X. Gridless Underdetermined Direction of Arrival Estimation in Sparse Circular Array Using Inverse Beamspace Transformation. Sensors. 2022; 22(8):2864. https://doi.org/10.3390/s22082864
Chicago/Turabian StyleTian, Ye, Yonghui Huang, Xiaoxu Zhang, and Xiaogang Tang. 2022. "Gridless Underdetermined Direction of Arrival Estimation in Sparse Circular Array Using Inverse Beamspace Transformation" Sensors 22, no. 8: 2864. https://doi.org/10.3390/s22082864
APA StyleTian, Y., Huang, Y., Zhang, X., & Tang, X. (2022). Gridless Underdetermined Direction of Arrival Estimation in Sparse Circular Array Using Inverse Beamspace Transformation. Sensors, 22(8), 2864. https://doi.org/10.3390/s22082864