
Concise Historic Overview of Strain Sensors Used in the Monitoring of Civil Structures: The First One Hundred Years


Abstract
1. Introduction
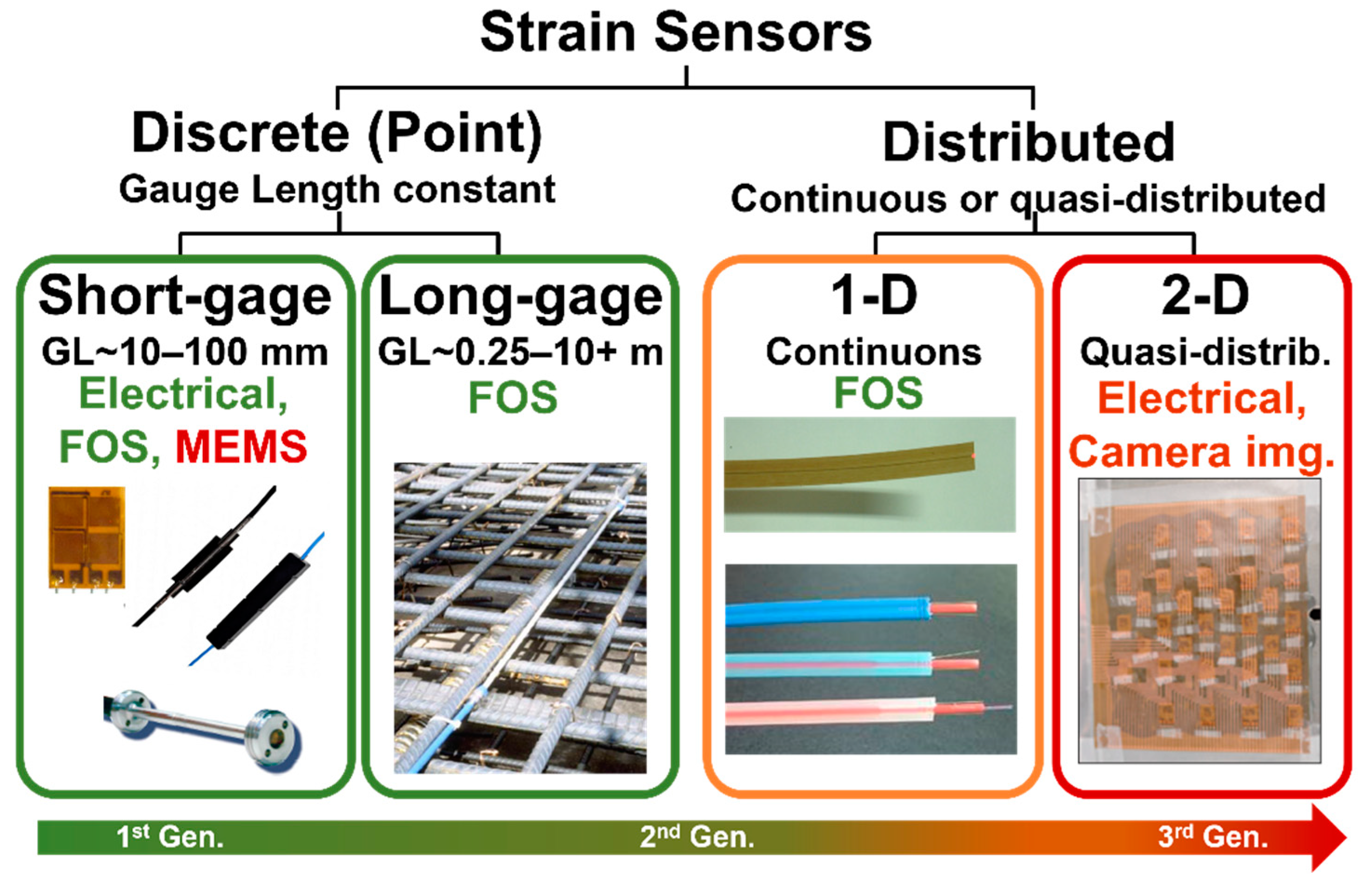
2. First Generation: Discrete Short-Gauge Electrical Strain Sensors
- -
- Long tradition: continued improvement in performance and extensive experience in applications make the first-generation strain sensors easy to understand, apply, and operate, which conveys confidence when using them.
- -
- Affordable cost: due to a simple functioning principle requiring inexpensive sensor parts and massive production resulting from their widespread use, the cost of the first-generation sensors is relatively low.
- -
- Excellent measurement performance: the first-generation strain sensors feature high resolution, typically in the range of 1 με (1 με = 1 microstrain = 1 μm/m = 1 × 10−6 m/m), and precision typically ranges between 0.5% and 2% of the sensors’ full scale; these measurement performances are suitable for the SHM of civil structures.
- -
- Easy repair of cable extensions: being made of simple electrical wires, the cable extensions, which are carriers of energy and information for the first-generation sensors, are easy to repair and replace onsite in the case of damage.
- -
- Wireless capability: being governed by electrical principles, the first-generation sensors are simple to equip with wireless capabilities, which in turn enable remote and decentralized reading, processing, analysis, and communication of data from sensors and even from the entire sensor network.
- -
- Electromagnetic interference (EMI): being governed by electrical principles, the functioning of first-generation strain sensors might be obstructed by interference from various sources of electromagnetic fields found in the proximity of monitored structures (e.g., electrical power lines and conductors, lightning and thunders, radio waves, etc.); the EMI can alter the measurements, and sometimes result in permanent sensor malfunction or damage; in some cases, mitigation measures can be taken (e.g., EMI shielding), but they incur additional material and installation cost;
- -
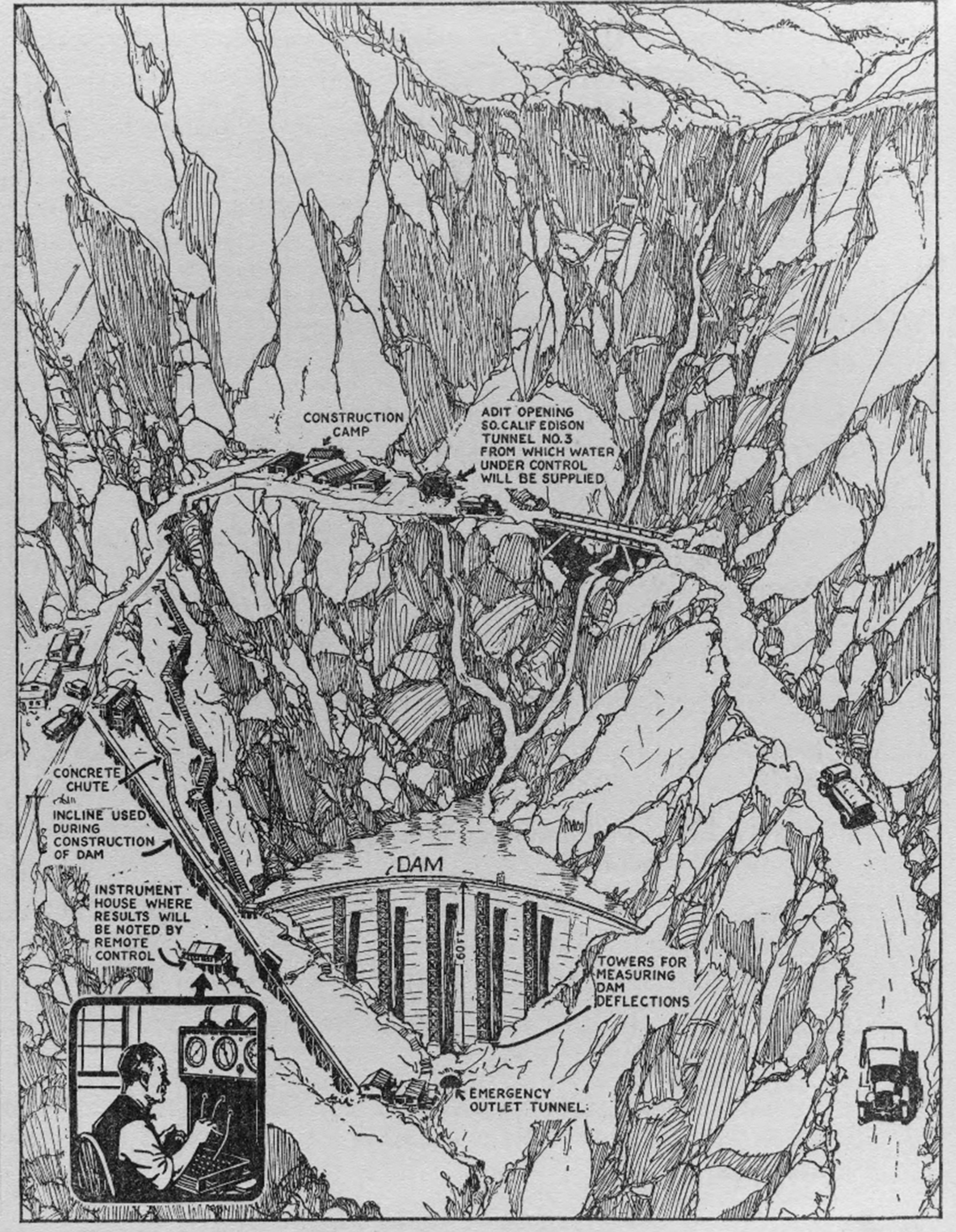
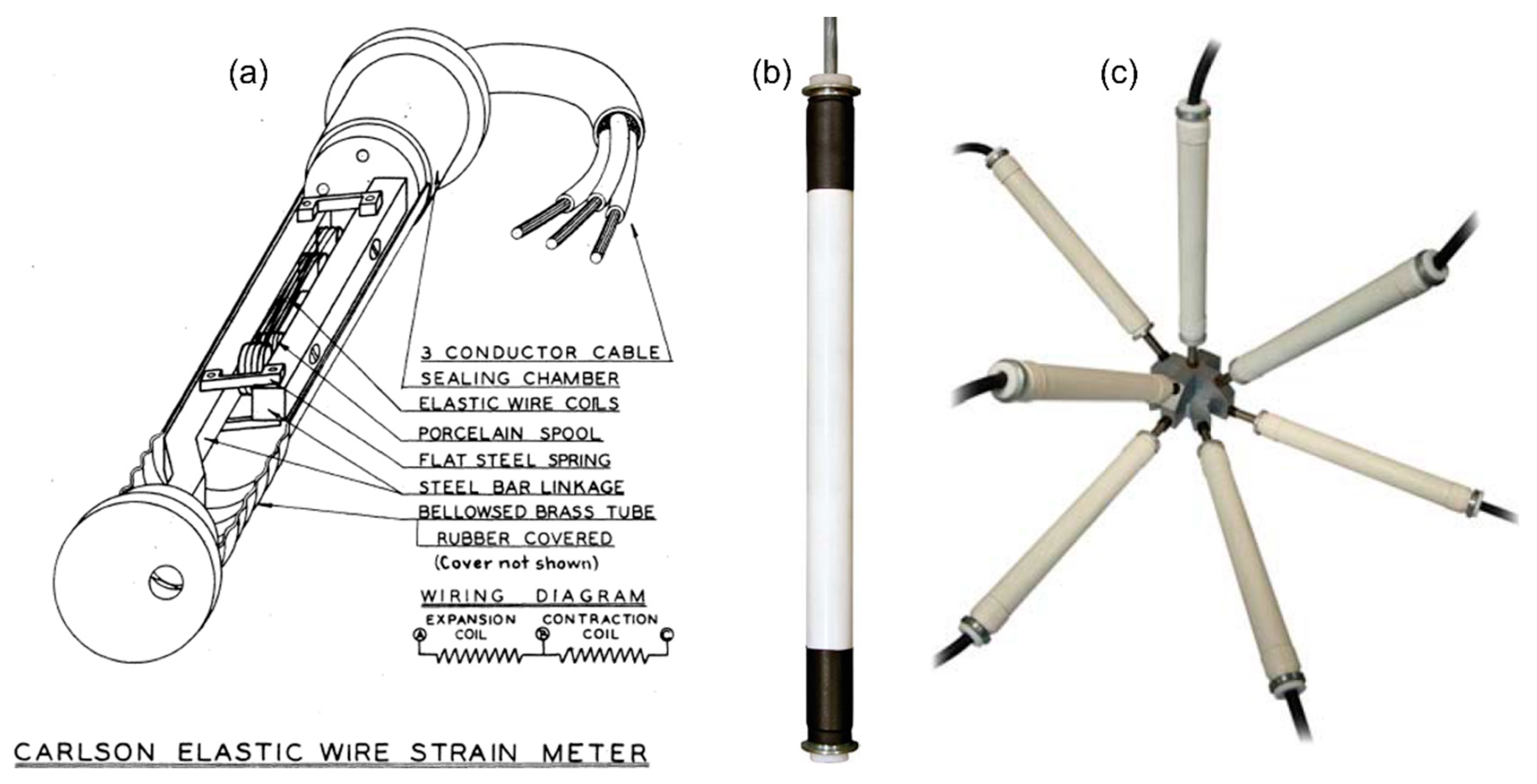
- Temperature compensation: except for the Carlson strain meter, sensing elements of the first-generation sensors are affected by environmental temperature changes and consequently, their strain measurements must be thermally compensated, which incurs additional material and installation cost and lowers the accuracy of strain measurement.
3. Second Generation: Discrete Short-Gauge, Long-Gauge, and Distributed Fiber-Optic Strain Sensors
- -
- Long-term stability and durability: optical fibers were originally designed for the purposes of telecom industry, and thus, they are designed to be chemically inert, with stable material properties in the long term (they were extensively tested to prove these properties); the main component of FOSS is a standard optical fiber, the same as the one used in the telecom industry, which provides long-term stability and durability to FOSS.
- -
- Electrical passivity and reliability: FOSS are electrically passive and thus they are not affected by electro-magnetic interference; this property along with long-term stability enables long-term reliability of sensor measurements; moreover, electrical passivity makes FOSS applicable in the environments where the use of electrical sensors is forbidden due to potential sparking (e.g., in the gas and oil industry).
- -
- Excellent measurement performance: the second-generation strain sensors feature high resolution, typically in the range of 0.2–5 με, and precision typically ranges between 1 με (for discrete FOSS and Rayleigh-based distributed FOSS) and 20 με (Brillouin-based distributed FOSS); these measurement performances are suitable for the SHM of civil structures.
- -
- Cost: one quarter of a century after reaching market maturity, the cost of the second-generation sensors is still on average higher than the cost of the first-generation sensors, which is due to use of expensive components and manufacturing processes; however, it is important to note that the cost of FOSS did not increase over time and thus, the difference in cost between the second- and the first-generation sensors has steadily decreased and is expected to further decrease in the near future.
- -
- Tedious repair of cable extensions in the case of damage: being made of optical fibers, the cable extensions are not easy to repair and replace onsite: connection (splicing) of optical fibers requires special equipment that might not be easy to handle and operate under on-site conditions.
- -
- Wireless capability: the FOSS cannot be interfaced wireless nodes, as they operate using optical signal; thus, the FOSS must be wired to the reading unit or channel switch; however, the fiber-optic strain sensor reading unit has the capability of wireless communication with the remote office location.
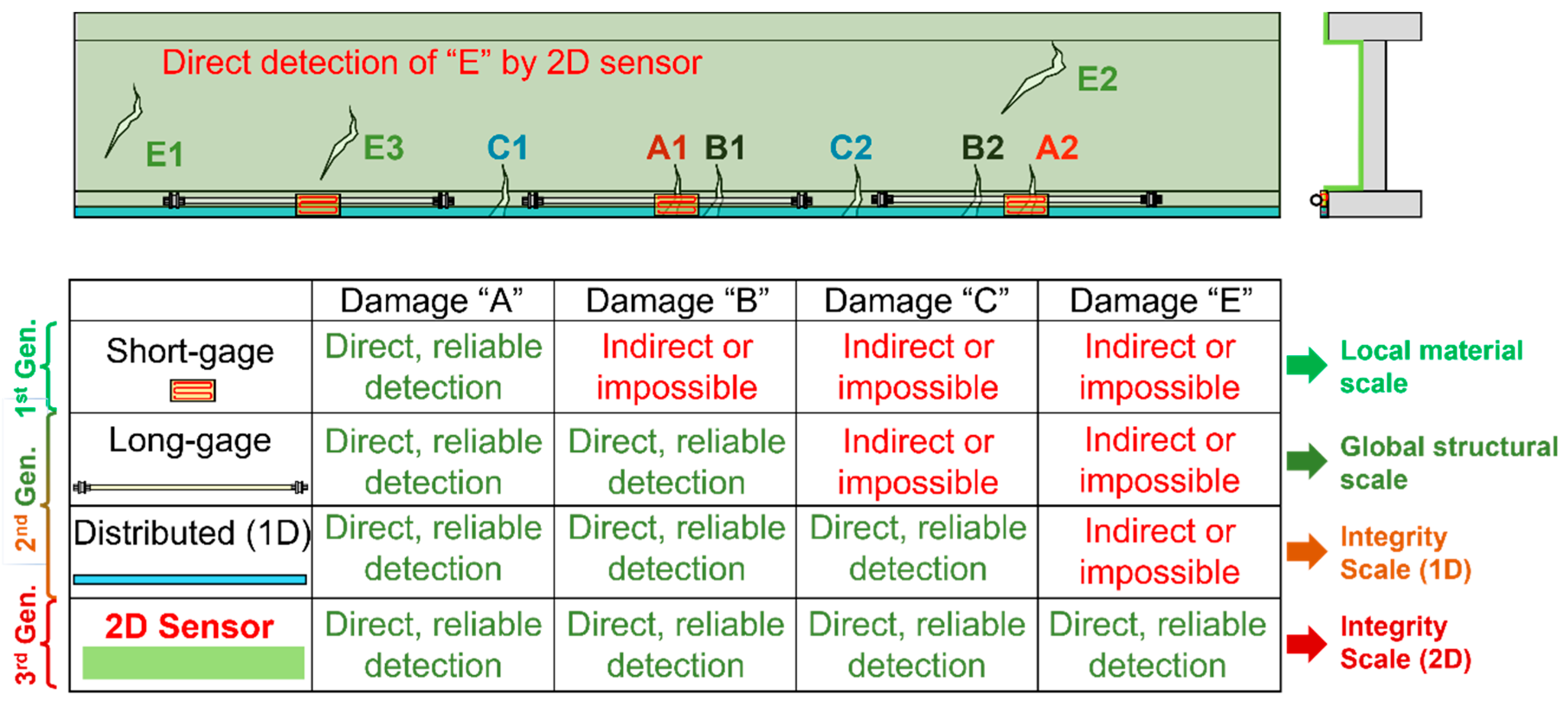
4. Third Generation: Distributed and Quasi-Distributed Two-Dimensional (2D) Strain Sensors
5. Conclusions and Future Research Directions
Funding
Conflicts of Interest
References
- Jarosevic, A.; Fabo, P.; Chandoga, M.; Begg, D.W. Elastomagnetic method of force measurement in prestressing steel. Inz. Stavby 1996, 7, 262–267. [Google Scholar]
- Wang, M.L.; Wang, G.; Zhao, Y. Application of EM Stress Sensors in Large Steel Cables. In Sensing Issues in Civil Structural Health Monitoring; Ansari, F., Ed.; Springer: Dordrecht, The Netherlands, 2005. [Google Scholar]
- Davidenkoff, N. The vibrating wire method of measuring deformations. Proc. ASTM 1934, 34, 847–860. [Google Scholar]
- Galambos, C.F.; Armstrong, W.L. Loading History of Highway Bridges. Natl. Acad. Sci. Natl. Res. Counc. Highw. Res. Rec. 1969, 295, 85–98. [Google Scholar]
- Bridges, M.C.; Gladwin, M.T.; Greenwood-Smith, R.; Muirhead, K. Monitoring of Stress, Strain and Displacement in and around a Vertical Pillar at Mount Isa Mine. Natl. Conf. Publ. Inst. Eng. Aust. 1976, 76, 44–49. [Google Scholar]
- Altounyan, P.F.R. Measurement of stresses, strain and temperature in concrete in shafts and insets. Dev. Geotech. Eng. 1981, 32, 154–159. [Google Scholar]
- Murnen, G.J.; Laubenthal, P.F. Instrumentation of The East Huntington Bridge. In Proceedings of the 2nd Annual International Bridge Conference, Pittsburgh, PA, USA, 17–19 June 1985; Engineers’ Society of Western Pennsylvania: Pittsburgh, PA, USA, 1985; pp. 135–141. [Google Scholar]
- Widow, A.L. Strain Gauge Technology, 2nd ed.; Elsevier Science Publishers, Ltd.: London, UK, 1992. [Google Scholar]
- Inaudi, D.; Vurpillot, S.; Glisic, B.; Kronenberg, P.; LLoret, S. Long-term monitoring of a concrete bridge with 100+ fiberoptic long-gage sensors. Proc. SPIE 1999, 3587, 50–59. [Google Scholar]
- Omenzetter, P.; Brownjohn, J.M.W. Application of time series analysis for bridge monitoring. Smart Mater. Struct. 2006, 15, 129–138. [Google Scholar] [CrossRef]
- Glisic, B.; Inaudi, D. Fibre Optic Methods for Structural Health Monitoring; John Wiley & Sons, Inc.: Chichester, UK, 2007. [Google Scholar]
- Abdel-Jaber, H.; Glisic, B. Monitoring of long-term prestress losses in prestressed concrete structures using fiber optic sensors. Struct. Health Monit. 2019, 18, 254–269. [Google Scholar] [CrossRef]
- Burdet, O.L. Load Testing and Monitoring of Swiss Bridges. Comité Européen du Béton, Safety and Performance Concepts, Bulletin d’Information Nr. 219; Comité Européen du Béton, Safety and Performance Concepts: Lausanne, Switzerland, 1993. [Google Scholar]
- Li, Y.; Guo, Z.; Chen, B.-C. Application of optoelectronic liquid lever sensor in urban bridges deflection monitoring. Appl. Mech. Mater. 2012, 198–199, 1184–1189. [Google Scholar] [CrossRef]
- Jauregui, D.V.; White, K.R.; Woodward, C.B.; Leitch, K.R. Noncontact photogrammetric measurement of vertical bridge deflection. J. Bridge Eng. 2003, 8, 212–222. [Google Scholar] [CrossRef]
- Tian, L.; Pan, B.; Cai, Y.; Lian, H.; Zhao, Y. Application of digital image correlation for long-distance bridge deflection measurement. Proc. SPIE 2013, 8769, 87692V. [Google Scholar]
- Roberts, G.W.; Meng, X.; Dodson, A.H. Integrating a global positioning system and accelerometers to monitor the deflection of bridges. J. Surv. Eng. 2004, 130, 65–72. [Google Scholar] [CrossRef]
- Figurski, M.; Galuszkiewicz, M.; Wrona, M. A bridge deflection monitoring with GPS. Artif. Satell. 2007, 42, 229–238. [Google Scholar] [CrossRef][Green Version]
- Psimoulis, P.A.; Stiros, S.C. Measurement of deflections and of oscillation frequencies of engineering structures using robotic theodolites (RTS). Eng. Struct. 2007, 29, 3312–3324. [Google Scholar] [CrossRef]
- Fang, C.; Yunfei, W. A new system for measuring bridge deflections based on laser imaging process. Appl. Mech. Mater. 2012, 143–144, 211–215. [Google Scholar]
- Gentile, C.; Bernardini, G. Radar-based measurement of deflections on bridges and large structures. Eur. J. Environ. Civ. Eng. 2010, 14, 495–516. [Google Scholar] [CrossRef]
- Choi, W.; Kim, B.R.; Lee, H.M.; Kim, Y.; Park, H.S. A deformed shape monitoring method for building structures based on a 2D laser scanner. Sensors 2013, 13, 6746–6758. [Google Scholar] [CrossRef] [PubMed]
- Guan, S.; Rice, J.; Li, C.; Wang, G. Bridge deflection monitoring using small, low-cost radar sensors. In Proceedings of the Structures Congress 2014, Boston, MA, USA, 3–5 April 2014; ASCE: Reston, VA, USA, 2014. [Google Scholar]
- Sigurdardottir, D.; Stearns, J.; Glisic, B. Error in the determination of the deformed shape of prismatic beams using the double integration of curvature. Smart Mater. Struct. 2017, 26, 075002. [Google Scholar] [CrossRef]
- Monsberger, C.M.; Lienhart, W. Design, Testing, and Realization of a Distributed Fiber Optic Monitoring System to Assess Bending Characteristics along Grouted Anchors. J. Lightwave Technol. 2019, 37, 4603–4609. [Google Scholar] [CrossRef]
- Glisic, B.; Inaudi, D.; Lau, J.M.; Fong, C.C. Ten-year monitoring of high-rise building columns using long-gauge fiber optic sensors. Smart Mater. Struct. 2013, 22, 055030. [Google Scholar] [CrossRef]
- Glisic, B.; Hubbell, D.; Sigurdardottir, D.; Yao, Y. Damage detection and characterization using long-gauge and distributed fiber optic sensors. Opt. Eng. 2013, 52, 087101. [Google Scholar] [CrossRef]
- Sigurdardottir, D.H.; Glisic, B. On-Site Validation of Fiber-Optic Methods for Structural Health Monitoring: Streicker Bridge. J. Civ. Struct. Health Monit. 2015, 5, 529–549. [Google Scholar] [CrossRef]
- Yarnold, M.T.; Moon, F.L.; Aktan, A.E. Temperature-Based Structural Identification of Long-Span Bridges. J. Struct. Eng. 2015, 141, 04015027. [Google Scholar] [CrossRef]
- Rytter, A. Vibration Based Inspection of Civil Engineering Structures. Ph.D. Thesis, University of Aalborg, Aalborg, Denmark, 1993. [Google Scholar]
- Abdel-Jaber, H.; Glisic, B. Analysis of the status of pre-release cracks in prestressed concrete structures using long-gauge sensors. Smart Mater. Struct. 2015, 24, 025038. [Google Scholar] [CrossRef]
- Torfs, T.; Sterken, T.; Brebels, S.; Santana, J.; van den Hoven, R.; Spiering, V.; Bertsch, N.; Trapani, D.; Zonta, D. Low Power Wireless Sensor Network for Building Monitoring. IEEE Sens. J. 2013, 13, 909–915. [Google Scholar] [CrossRef]
- Mohamad, H.; Bennett, P.J.; Soga, K.; Mair, R.J.; Lim, C.-S.; Knight-Hassell, C.K.; Ow, C.N. Monitoring tunnel deformation induced by close-proximity bored tunneling using distributed optical fiber strain measurements. Geotech. Spec. Publ. 2007, 175, 84. [Google Scholar]
- Maraval, D.; Gabet, R.; Jaouen, Y.; Lamour, V. Dynamic Optical Fiber Sensing with Brillouin Optical Time Domain Reflectometry: Application to Pipeline Vibration Monitoring. J. Lightwave Technol. 2017, 35, 3296–3302. [Google Scholar] [CrossRef]
- Feng, X.; Wu, W.; Meng, D.; Ansari, F.; Zhou, J. Distributed monitoring method for upheaval buckling in subsea pipelines with Brillouin optical time-domain analysis sensors. Adv. Struct. Eng. 2017, 20, 180–190. [Google Scholar] [CrossRef]
- Rogers, J.D. Hoover Dam: Evolution of the Dam’s Design. In Proceedings of the Hoover Dam 75th Anniversary History Symposium, Las Vegas, NV, USA, 21–22 October 2010; pp. 1–39. [Google Scholar] [CrossRef]
- Xu, J.; Dong, Y.; Li, H. Research on fatigue damage detection for wind turbine blade based on high-spatial-resolution DPP-BOTDA. Proc. SPIE Int. Soc. Opt. Eng. 2014, 9061, 906130. [Google Scholar]
- Perry, C.C.; Lissner, H.R. The Strain Gage Primer; McGraw-Hill, Inc.: New York, NY, USA, 1955. [Google Scholar]
- Stein, P.K. A brief history of bonded resistance strain gages from conception to commercialization. Exp. Tech. 1990, 14, 13–19. [Google Scholar] [CrossRef]
- Schaefer, O. Die Schwingende Saite als Dehnungsmesser. Zeil. Des Ver. Dtsch. Ing. 1919, 63, 1008. [Google Scholar]
- Coyne, A. Quelques résultats d’auscultation sonore sur les ouvrages en béton, béton armé ou metal. Ann. ITBTP July-August 1938. [Google Scholar]
- Rosin-Corre, N.; Noret, C.; Bordes, J.-L. L’auscultation par capteurs à corde vibrante, 80 ans de retour d’expérience (Vibrating wire sensors monitoring, 80 years of feedback). In Proceedings of the Colloque du Comité Français des Barrages et Réservoirs (CFBR), Lyon, France, 28–29 November 2011. [Google Scholar]
- Potocki, F.P. Vibrating-Wire Strain Gauge for Long-Term Internal Measurements in Concrete. Eng. 1958, 206, 964–967. [Google Scholar]
- McCollum, B.; Peters, O.S. A New Electrical Telemeter. Technol. Pap. Bur. Stand. 1924, 17, 737–781. [Google Scholar]
- Carlson, R.W. Development and Analysis of a Device for Measuring Compressive Stress in Concrete. Ph.D. Thesis, Massachusetts Institute of Technology (MIT), Boston, MA, USA, 1939. [Google Scholar]
- Marx, J. Use of the Piezoelectric Gauge for Internal Friction Measurements. Rev. Sci. Instrum. 1951, 22, 503–509. [Google Scholar] [CrossRef]
- Smith, A.L.; Mee, D.J. Dynamic strain measurement using piezoelectric polymer film. J. Strain Anal. 1996, 31, 463–465. [Google Scholar] [CrossRef]
- White, R.G.; Trétout, H. Acoustic emission detection using a piezoelectric strain gauge for failure mechanism identification in cfrp. Composites 1979, 10, 101–109. [Google Scholar] [CrossRef]
- Lin, B.; Giurgiutiu, V. Modeling and testing of PZT and PVDF piezoelectric wafer active sensors. Smart Mater. Struct. 2006, 15, 1085. [Google Scholar] [CrossRef]
- Rezvani, S.; Nikolov, N.; Kim, C.-J.; Park, S.S.; Lee, J. Development of a Vise with built-in Piezoelectric and Strain Gauge Sensors for Clamping and Cutting Force Measurements. Procedia Manuf. 2020, 48, 1041–1046. [Google Scholar] [CrossRef]
- Gullapalli, H.; Vemuru, V.S.M.; Kumar, A.; Botello-Mendez, A.; Vajtai, R.; Terrones, M.; Nagarajaiah, S.; Ajayan, P.M. Flexible Piezoelectric ZnO–Paper Nanocomposite Strain Sensor. Small 2010, 6, 1641–1646. [Google Scholar] [CrossRef] [PubMed]
- Adler, A.J. Wireless strain and temperature measurement with radio telemetry-Development of miniature strain and temperature telemetry transmitters enables measurement of physical variables in industrial applications where wires are difficult or impossible to use. Exp. Mech. 1971, 11, 378–384. [Google Scholar] [CrossRef]
- Varadan, V.V.; Varadan, V.K.; Bao, X.; Ramanathan, S.; Piscotty, D. Wireless passive IDT strain microsensor. Smart Mater. Struct. 1997, 6, 745–751. [Google Scholar] [CrossRef]
- Straser, E.G.; Kiremidjian, A.S.; Meng, T.H.; Redlefsen, L. Modular, wireless network platform for monitoring structures. In Proceedings of the International Modal Analysis Conference–IMAC, Santa Barbara, CA, USA, 2–5 February 1998; Volume 1, pp. 450–456. [Google Scholar]
- Hou, T.-C.; Lynch, J.P. Rapid-to-deploy wireless monitoring systems for static and dynamic load testing of bridges: Validation on the grove street bridge. Proc. SPIE Int. Soc. Opt. Eng. 2006, 6178, 61780D. [Google Scholar]
- Jang, S.; Jo, H.; Cho, S.; Mechitov, K.; Rice, J.A.; Sim, S.-H.; Jung, H.-J.; Yun, C.-B.; Spencer, B.F., Jr.; Agha, G. Structural health monitoring of a cable-stayed bridge using smart sensor technology: Deployment and evaluation. Smart Struct. Syst. 2010, 6, 439–459. [Google Scholar] [CrossRef]
- Meng, Z.; Li, Z. RFID Tag as a Sensor-A Review on the Innovative Designs and Applications. Meas. Sci. Rev. 2016, 16, 305–315. [Google Scholar] [CrossRef]
- Occhiuzzi, C.; Paggi, C.; Marrocco, G. Passive RFID Strain-Sensor Based on Meander-Line Antennas. IEEE Trans. Antennas Propag. 2011, 59, 4836–4840. [Google Scholar] [CrossRef]
- Zhang, Y.; Bai, L. Rapid structural condition assessment using radio frequency identification (RFID) based wireless strain sensor. Autom. Constr. 2015, 54, 1–11. [Google Scholar] [CrossRef]
- Kuhn, M.F.; Breier, G.P.; Dias, A.R.P.; Clarke, T.G.R. A Novel RFID-Based Strain Sensor for Wireless Structural Health Monitoring. J. Nondestruct. Eval. 2018, 37, 22. [Google Scholar] [CrossRef]
- Keil, S. Technology and Practical Use of Strain Gages with Particular Consideration of Stress Analysis Using Strain Gages, 1st ed.; Ernst & Sohn GmbH & Co.: Berlin, Germany, 2017. [Google Scholar]
- Bordes, J.L.; Debreuille, P.J. Some Facts About Long-Term Reliability of Vibrating Wire Instruments. Transp. Res. Rec. 1985, 1004, 20–27. [Google Scholar]
- Sofi, A.; Regita, J.J.; Rane, B.; Lau, H.H. Structural health monitoring using wireless smart sensor network–An overview. Mech. Syst. Signal Process. 2022, 163, 108113. [Google Scholar] [CrossRef]
- Glisic, B.; Yao, Y.; Tung, S.-T.; Wagner, S.; Sturm, J.C.; Verma, N. Strain Sensing Sheets for Structural Health Monitoring based on Large-area Electronics and Integrated Circuits. Proc. IEEE 2016, 104, 1513–1528. [Google Scholar] [CrossRef]
- Measures, R.M. Structural Monitoring with Fiber Optic Technology; Academic Press: San Diego, CA, USA, 2001. [Google Scholar]
- Hill, K.O. Aperiodic Distributed-Parameter Waveguides for Integrated Optics. Appl. Opt. 1974, 13, 1853–1856. [Google Scholar] [CrossRef] [PubMed]
- Culshaw, B.; Davies, D.E.N.; Kingsley, S.A. Multimode optical fiber sensors. Adv. Ceram. 1981, 2, 515–528. [Google Scholar]
- Asawa, C.K.; Yao, S.K.; Stearns, R.C.; Mota, N.L.; Downs, J.W. High-sensitivity fibre-optic strain sensors for measuring structural distortion. Electron. Lett. 1982, 18, 362–364. [Google Scholar] [CrossRef]
- Meltz, G.; Dunphy, J.R.; Glenn, W.H.; Farina, J.D.; Leonberger, F.J. Fiber optic temperature and strain sensors. Proc. SPIE Fiber Opt. Sens. II 1987, 798, 104–114. [Google Scholar]
- Hogg, D.; Turner, R.D.; Measures, R.M. Polarimetric fiber-optic structural strain sensor characterization. Proc. SPIE Fiber Opt. Smart Struct. Ski. II 1989, 1170, 542–550. [Google Scholar]
- Udd, E.; Clark, T.E.; Joseph, A.A.; Levy, R.L.; Schwab, S.D.; Smith, H.G.; Balestra, C.L.; Todd, J.R.; Marcin, J. Fiber optics development at McDonnell Douglas. Proc. SPIE 1991, 1418, 134–152. [Google Scholar]
- Mason, T.G.B.; Valis, T.; Hogg, W.D. Commercialization of fiber optic strain gauge systems. Proc. SPIE Fiber Opt. Laser Sens. X 1992, 1795, 215–222. [Google Scholar]
- Udd, E.; Kunzler, M. Development and Evaluation of Fiber Optic Sensors, Project 312, Final Report for Oregon DOT and FHWA; Blue Road Research: Gresham, OR, USA, 2003. [Google Scholar]
- Choquet, P.; Juneau, F.; Bessette, J. New generation of Fabry-Perot fiber optic sensors for monitoring of structures. Proc. SPIE 2000, 3986, 418–426. [Google Scholar]
- Xu, B.; Wu, Z.; Yokoyama, K. Parametric identification with dynamic strain measurement from long-gauge FBG sensors and neural networks. In Proceedings of the 4th International Workshop on Structural Health Monitoring: From Diagnostics and Prognostics to Structural Health Management, IWSHM 2003, Stanford, CA, USA, 15–17 September 2003; DEStech Publications: Lancaster, PA, USA, 2003; pp. 1522–1529. [Google Scholar]
- Hartog, A.H. A Distributed Temperature Sensor Based on Liquid-Core Optical Fibers. J. Lightwave Technol. 1983, 1, 498–509. [Google Scholar] [CrossRef]
- Kingsley, S.A. Distributed Fiber-Optic Sensors. Adv. Instrum. 1984, 39, 315–330. [Google Scholar]
- Kikuchi, K.; Naito, T.; Okoshi, T. Measurement of Raman Scattering in Single-Mode Optical Fiber by Optical Time-Domain Reflectometry. IEEE J. Quantum Electron. 1988, 24, 1973–1975. [Google Scholar] [CrossRef]
- Dunphy, J.R.; Meltz, G.; Elkow, R.M. Distributed Strain Sensing with a Twin-Core Fiber Optic Sensors. Instrum. Aerosp. Ind. 1986, 32, 145–149. [Google Scholar]
- Culverhouse, D.; Farahi, F.; Pannell, C.N.; Jackson, D.A. Potential of stimulated Brillouin scattering as sensing mechanism for distributed temperature sensors. Electron. Lett. 1989, 25, 913–915. [Google Scholar] [CrossRef]
- Bao, X.; Webb, D.J.; Jackson, D.A. Characteristics of Brillouin gain based distributed temperature sensors. Electron. Lett. 1993, 29, 1543–1544. [Google Scholar] [CrossRef]
- Rogers, A.J.; Handerek, V.A. Frequency-derived distributed optical-fiber sensing: Rayleigh backscatter analysis. Appl. Opt. 1992, 31, 4091–4095. [Google Scholar] [CrossRef] [PubMed]
- Wait, P.C.; Newson, T.P. Reduction of coherent noise in the Landau Placzek ratio method for distributed fibre optic temperature sensing. Opt. Commun. 1996, 131, 285–289. [Google Scholar] [CrossRef]
- Horiguchi, T.; Kurashima, T.; Koyamada, Y. Measurement of temperature and strain distribution by Brillouin frequency shift in silica optical fibers. Proc. SPIE Int. Soc. Opt. Eng. 1993, 1797, 2–13. [Google Scholar]
- Nikles, M.; Thevenaz, L.; Robert, P. Simple distributed fiber sensor based on Brillouin gain spectrum analysis. Opt. Lett. 1994, 21, 758–760. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Yang, Z. Distributed optical fiber sensing of cracks in concrete. Proc. SPIE Int. Soc. Opt. Eng. 1998, 3555, 291–299. [Google Scholar]
- Posey, R., Jr.; Johnson, G.A.; Vohra, S.T. Strain sensing based on coherent Rayleigh scattering in an optical fibre. Electron. Lett. 2000, 36, 1688–1689. [Google Scholar] [CrossRef]
- Inaudi, D.; Glisic, B. Development of distributed strain and temperature sensing cables. Proc. SPIE Int. Soc. Opt. Eng. I 2005, 5855, 222–225. [Google Scholar]
- Inaudi, D.; Glisic, B. Distributed fiber optic strain and temperature sensing for structural health monitoring. In Proceedings of the 3rd International Conference on Bridge Maintenance, Safety and Management, Porto, Portugal, 16–19 July 2006; pp. 963–964. [Google Scholar]
- Glisic, B.; Posenato, D.; Inaudi, D. Integrity monitoring of old steel bridge using fiber optic distributed sensors based on Brillouin scattering. Proc. SPIE Int. Soc. Opt. Eng. 2007, 6531, 65310P. [Google Scholar]
- Hoult, N.A.; Bennett, P.J.; Middleton, C.R.; Soga, K. Distributed fibre optic strain measurements for pervasive monitoring of civil infrastructure. In Proceedings of the 4th International Conference on Structural Health Monitoring of Intelligent Infrastructure, SHMII, Zurich, Switzerland, 22–24 July 2009; ISHMII: Winnipeg, MB, Canada, 2009. [Google Scholar]
- Rinaudo, P.; Paya-Zaforteza, I.; Calderón, P.; Sales, S. Experimental and analytical evaluation of the response time of high temperature fiber optic sensors. Sens. Actuators A Phys. 2016, 243, 167–174. [Google Scholar] [CrossRef]
- Bao, Y.; Hoehler, M.S.; Smith, C.M.; Bundy, M.; Chen, G. Temperature measurement and damage detection in concrete beams exposed to fire using PPP-BOTDA based fiber optic sensors. Smart Mater. Struct. 2017, 26, 105034. [Google Scholar] [CrossRef] [PubMed]
- Zhou, D.; Dong, Y.; Wang, B.; Pang, C.; Ba, D.; Zhang, H.; Lu, Z.; Li, H.; Bao, X. Single-shot BOTDA based on an optical chirp chain probe wave for distributed ultrafast measurement. Light Sci. Appl. 2018, 7, 32. [Google Scholar] [CrossRef] [PubMed]
- Motil, A.; Bergman, A.; Tur, M. State of the art of Brillouin fiber-optic distributed sensing. Opt. Laser Technol. 2016, 78, 81–103. [Google Scholar] [CrossRef]
- Lu, Y.; Qin, Z.; Lu, P.; Zhou, D.; Chen, L.; Bao, X. Distributed Strain and Temperature Measurement by Brillouin Beat Spectrum. IEEE Photonics Technol. Lett. 2013, 25, 1050–1053. [Google Scholar] [CrossRef]
- Inaudi, D.; Glisic, B. Integration of distributed strain and temperature sensors in composite coiled tubing. Proc. SPIE 2006, 6167, 616717. [Google Scholar]
- Bado, M.F.; Casas, J.R.; Barrias, A. Performance of Rayleigh-based distributed optical fiber sensors bonded to reinforcing bars in bending. Sensors 2018, 18, 3125. [Google Scholar] [CrossRef] [PubMed]
- Fan, L.; Bao, Y.; Chen, G. Feasibility of distributed fiber optic sensor for corrosion monitoring of steel bars in reinforced concrete. Sensors 2018, 18, 3722. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.; Sharif Khodaei, Z. Shape Sensing with Rayleigh Backscattering Fibre Optic Sensor. Sensors 2020, 20, 4040. [Google Scholar] [CrossRef]
- Méndez, A.; Csipkes, A. Overview of Fiber Optic Sensors for NDT Applications. In Nondestructive Testing of Materials and Structures, RILEM Bookseries; Güneş, O., Akkaya, Y., Eds.; Springer: Dordrecht, The Netherlands, 2013; Volume 6. [Google Scholar]
- Wu, T.; Liu, G.; Fu, S.; Xing, F. Recent Progress of Fiber-Optic Sensors for the Structural Health Monitoring of Civil Infrastructure. Sensors 2020, 20, 4517. [Google Scholar] [CrossRef] [PubMed]
- Yao, Y.; Glisic, B. Reliable damage detection and localization using direct strain sensing. In Proceedings of the 6th International IAMBAS Conference Bridge Maintenance Safety Management, Stresa, Italy, 8–12 July 2012; CRC Press: London, UK, 2012; pp. 714–721. [Google Scholar]
- Lanzara, G.; Feng, J.; Chang, F.-K. A large area flexible expandable network for structural health monitoring. Proc. SPIE 2008, 6932, 69321N. [Google Scholar]
- Salowitz, N.P.; Guo, Z.; Kim, S.-J.; Li, Y.-H.; Lanzara, G.; Chang, F.-K. Microfabricated expandable sensor networks for intelligent sensing materials. IEEE Sens. J. 2014, 14, 2138–2144. [Google Scholar] [CrossRef]
- Glisic, B.; Verma, N. Very dense arrays of sensors for SHM based on large area electronics, Structural Health Monitoring 2011: Condition-Based Maintenance and Intelligent Structures. In Proceedings of the 8th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 13–15 September 2011; Volume 2, pp. 1409–1416. [Google Scholar]
- Tung, S.T.; Yao, Y.; Glisic, B. Sensing sheet: The sensitivity of thin-film full-bridge strain sensors for crack detection and characterization. Meas. Sci. Technol. 2014, 25, 075602. [Google Scholar] [CrossRef]
- Zonta, D.; Chiappini, A.; Chiasera, A.; Ferrari, M.; Pozzi, M.; Battisti, L.; Benedetti, M. Photonic crystals for monitoring fatigue phenomena in steel structures. Proc. SPIE Int. Soc. Opt. Eng. 2009, 7292, 729215. [Google Scholar]
- Zur, L.; Tran, L.T.N.; Meneghetti, M.; Tran, V.T.T.; Lukowiak, A.; Chiasera, A.; Zonta, D.; Ferrari, M.; Righini, G.C. Tin-dioxide nanocrystals as Er3+ luminescence sensitizers: Formation of glass-ceramic thin films and their characterization. Opt. Mater. 2017, 63, 95–100. [Google Scholar] [CrossRef]
- Loh, K.J.; Hou, T.C.; Lynch, J.P.; Kotov, N.A. Carbon Nanotube Sensing Skins for Spatial Strain and Impact Damage Identification. J. Nondestruct. Eval. 2009, 28, 9–25. [Google Scholar] [CrossRef]
- Pyo, S.; Loh, K.J.; Hou, T.C.; Jarva, E.; Lynch, J.P. A wireless impedance analyzer for automated tomographic mapping of a nanoengineered sensing skin. Smart Struct. Syst. 2011, 8, 139–155. [Google Scholar] [CrossRef]
- Laflamme, S.; Kollosche, M.; Connor, J.J.; Kofod, G. Robust Flexible Capacitive Surface Sensor for Structural Health Monitoring Applications. J. Eng. Mech. 2013, 139, 879–885. [Google Scholar] [CrossRef]
- Hallaji, M.; Pour-Ghaz, M. A new sensing skin for qualitative damage detection in concrete elements: Rapid difference imaging with electrical resistance tomography. NDT E Int. 2014, 68, 13–21. [Google Scholar] [CrossRef]
- Schumacher, T.; Thostenson, E.T. Development of structural carbon nanotube-based sensing composites for concrete structures. J. Intell. Mater. Syst. Struct. 2014, 25, 1331–1339. [Google Scholar] [CrossRef]
- Lim, A.S.; Melrose, Z.R.; Thostenson, E.T.; Chou, T.W. Damage sensing of adhesively-bonded hybrid composite/steel joints using carbon nanotubes. Compos. Sci. Technol. 2011, 71, 1183–1189. [Google Scholar] [CrossRef]
- Withey, P.A.; Vemuru, V.S.M.; Bachilo, S.M.; Nagarajaiah, S.; Weisman, R.B. Strain paint: Noncontact strain measurement using single-walled carbon nanotube composite coatings. Nano Lett. 2012, 12, 3497–3500. [Google Scholar] [CrossRef] [PubMed]
- Ladani, R.B.; Wu, S.; Kinloch, A.J.; Ghorbani, K.; Mouritz, A.P.; Wang, C.H. Enhancing fatigue resistance and damage characterisation in adhesively-bonded composite joints by carbon nanofibers. Compos. Sci. Technol. 2017, 149, 116–126. [Google Scholar] [CrossRef]
- Aygun, L.E.; Kumar, V.; Weaver, C.; Gerber, M.J.; Wagner, S.; Verma, N.; Glisic, B.; Sturm, J.C. Large-area resistive strain sensing sheet for structural health monitoring. Sensors 2020, 20, 1386. [Google Scholar] [CrossRef] [PubMed]
- Nonis, C.; Niezrecki, C.; Yu, T.-Y.; Ahmed, S.; Su, C.-F.; Schmidt, T. Structural health monitoring of bridges using digital image correlation. Proc. SPIE 2013, 8695, 869507. [Google Scholar]
- Yang, Y.; Dorn, C.; Mancini, T.; Talken, Z.; Theiler, J.; Kenyon, G.; Farrar, C.; Mascarenas, D. Reference-free detection of minute, non-visible, damage using full-field, high-resolution mode shapes output-only identified from digital videos of structures. Struct. Health Monit. 2018, 17, 514–531. [Google Scholar] [CrossRef]
- Hallee, M.J.; Napolitano, R.K.; Reinhart, W.F.; Glisic, B. Crack Detection in Images of Masonry Using CNNs. Sensors 2021, 21, 4929. [Google Scholar] [CrossRef] [PubMed]
- Zayed, T.; Zhu, Z.; Dawood, T. Machine vision-based model for spalling detection and quantification in subway networks. Autom. Constr. 2017, 81, 149–160. [Google Scholar]
- Jacobsen, S.C.; Mladejovsky, M.G.; Davis, C.C.; Wood, J.E.; Wyatt, R.F. Advanced intelligent mechanical sensors (AIMS). In Proceedings of the TRANSDUCERS ’91: 1991 International Conference on Solid-State Sensors and Actuators. Digest of Technical Papers, San Francisco, CA, USA, 24–27 June 1991; pp. 969–973. [Google Scholar]
- Pozzi, M.; Zonta, D.; Trapani, D.; Amditis, A.J.; Bimpas, M.; Stratakos, Y.E.; Ulieru, D. MEMS-based sensors for post-earthquake damage assessment. J. Phys. Conf. Ser. 2011, 305, 012100. [Google Scholar] [CrossRef]
- Saboonchi, H.; Ozevin, D. MetalMUMPs-based piezoresistive strain sensors for integrated on-chip sensor fusion. IEEE Sens. J. 2015, 15, 568–578. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley & Sons, Inc.: New York, NY, USA, 2012. [Google Scholar]
- Malekloo, A.; Ozer, E.; AlHamaydeh, M.; Girolami, M. Machine learning and structural health monitoring overview with emerging technology and high-dimensional data source highlights. Struct. Health Monit. 2021. [Google Scholar] [CrossRef]
- Doghri, W.; Saddoud, A.; Chaari Fourati, L. Cyber-physical systems for structural health monitoring: Sensing technologies and intelligent computing. J. Supercomput. 2022, 78, 766–809. [Google Scholar] [CrossRef]
- Stanacevic, M.; Ahmad, A.; Sha, X.; Athalye, A.; Das, S.; Caylor, K.; Glisic, B.; Djuric, P.M. RF Backscatter-Based Sensors for Structural Health Monitoring. In Proceedings of the BalkanCom’21, Novi Sad, Serbia, 20–22 September 2021. [Google Scholar]
- Aguero, M.; Maharjan, D.; Rodriguez, M.D.P.; Mascarenas, D.D.L.; Moreu, F. Design and Implementation of a Connection between Augmented Reality and Sensors. Robotics 2020, 9, 3. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Vibrating Wire Strain Sensor | Resistive Strain Gauge | Carlson Strain Meter |
|---|---|---|---|
| Gauge length | Typical: 50–150 mm Special (long): 300 mm | Typical: 0.3–20 mm Special (long): 150 mm | Typical: 203–508 mm Special (short): 102 mm |
| Multiplexing (the way multiple sensors are accessed by the reading unit) | Parallel (one by one) | Parallel (one by one) | Parallel (one by one) |
| Maximum number of sensors per reading unit (with a channel switch or multiplexer) | 32 * | 1200 * | 24 * |
| Stability | Long-term stable | Long-term drift (typical) | Long-term stable |
| Resolution | Typical: 1 με Best: 0.35 με | Typical: 1 με Best: 0.5 με | Typical: 2–3 με Best: 1.5 με |
| Linearity (repeatability precision) | Typical: ±0.5% Full Scale Best: ±0.1% Full Scale | 0.2–2% | N/A |
| Sensor range | Typical: 3000 με Extended: 10,000 με | Typical: ±10,000 με Extended: ±100,000 με | Typical: 2000 με Extended: 3900 με |
| Temperature sensitivity | Compensated with an integrated temperature sensor | Compensation needed | Self-compensated (by measurement principle) |
| Measurement frequency | Typical: 0.25–1 Hz Dynamic: 20 to 333 Hz Max.: 1 kHz * | Typical: 100–200 Hz Max. 100 kHz | N/A |
| Property | Extrinsic Interferometry (EFPI) | Intrinsic Interferometry (SOFO) | Fiber Bragg Gratings (FBG) | Intensity Based (Micro-Bending) |
|---|---|---|---|---|
| Gauge length | 51 to 70 mm | 250 mm to 20 m | 10 mm to 2 m | 100 mm to 10 m |
| Multiplexing | Parallel | Parallel | In-line and parallel | Parallel |
| Max. number of sensors per reading unit | 32 | Static: unlimited Dynamic: 8 | 80 to 300 (depending on reading unit) | 80 |
| Stability | Long-term stable | Static: long-term stable Dynamic: short-term stable | Long-term stable | Long-term drift (typical 2%) |
| Resolution | 0.01% full scale | Static: 2 μm/gauge length Dynamic: 10 nm/gauge length | 0.2 με | 1 μm/gauge length |
| Repeatability (precision) | N/A * | Static: 0.2% full scale Dynamic: N/A * | 1 με | 1% |
| Sensor range | ±3000 με | Static: −5000 με to +10,000 με Dynamic: ±5 mm/gauge length | −5000 με to +7500 με | ±5000 με |
| Temperature sensitivity | Insensitive (by measurement principle, but might be packaging dependent) | Self-compensated (by measurement principle) | Compensation needed | 0.6 μm/°C |
| Measurement frequency | 20 Hz | Static: 0.1 Hz Dynamic: 10 kHz | 0.5 MHz | 100 Hz |
| Property | Stimulated Brillouin Scattering | Spontaneous Brillouin Scattering | Rayleigh Scattering |
|---|---|---|---|
| Spatial resolution (equivalent to gauge length) | 0.2 to 5 m | 1 m | 10 mm |
| Sampling interval (min. space between measurement points on sensor) | 100 mm | 50 mm | 0.65 mm |
| Maximum number of sensors per reading unit (with channel switch or multiplexer) | 16 | N/A | 8 |
| Stability | Long-term stable | Long-term stable | Long-term stable |
| Resolution | 2 με | 2 με | 0.1 με |
| Reproducibility (“accuracy”) | ±2 to ±50 με | ±20 με | ±30 με |
| Sensor range | ±10,000 με | ±10,000 με | ±15,000 με |
| Max. sensor length | 50 km | 25 km | 100 m |
| Temperature sensitivity | Compensation needed | Compensation needed | Compensation needed |
| Measurement frequency | 10 sec. to 15 min. | 4 to 25 min. | 250 Hz. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glisic, B. Concise Historic Overview of Strain Sensors Used in the Monitoring of Civil Structures: The First One Hundred Years. Sensors 2022, 22, 2397. https://doi.org/10.3390/s22062397
Glisic B. Concise Historic Overview of Strain Sensors Used in the Monitoring of Civil Structures: The First One Hundred Years. Sensors. 2022; 22(6):2397. https://doi.org/10.3390/s22062397
Chicago/Turabian StyleGlisic, Branko. 2022. "Concise Historic Overview of Strain Sensors Used in the Monitoring of Civil Structures: The First One Hundred Years" Sensors 22, no. 6: 2397. https://doi.org/10.3390/s22062397
APA StyleGlisic, B. (2022). Concise Historic Overview of Strain Sensors Used in the Monitoring of Civil Structures: The First One Hundred Years. Sensors, 22(6), 2397. https://doi.org/10.3390/s22062397