
A New In Situ Coaxial Capacitive Sensor Network for Debris Monitoring of Lubricating Oil



Abstract
:1. Introduction
2. Design and Simulation of Coaxial Capacitive Sensor Network
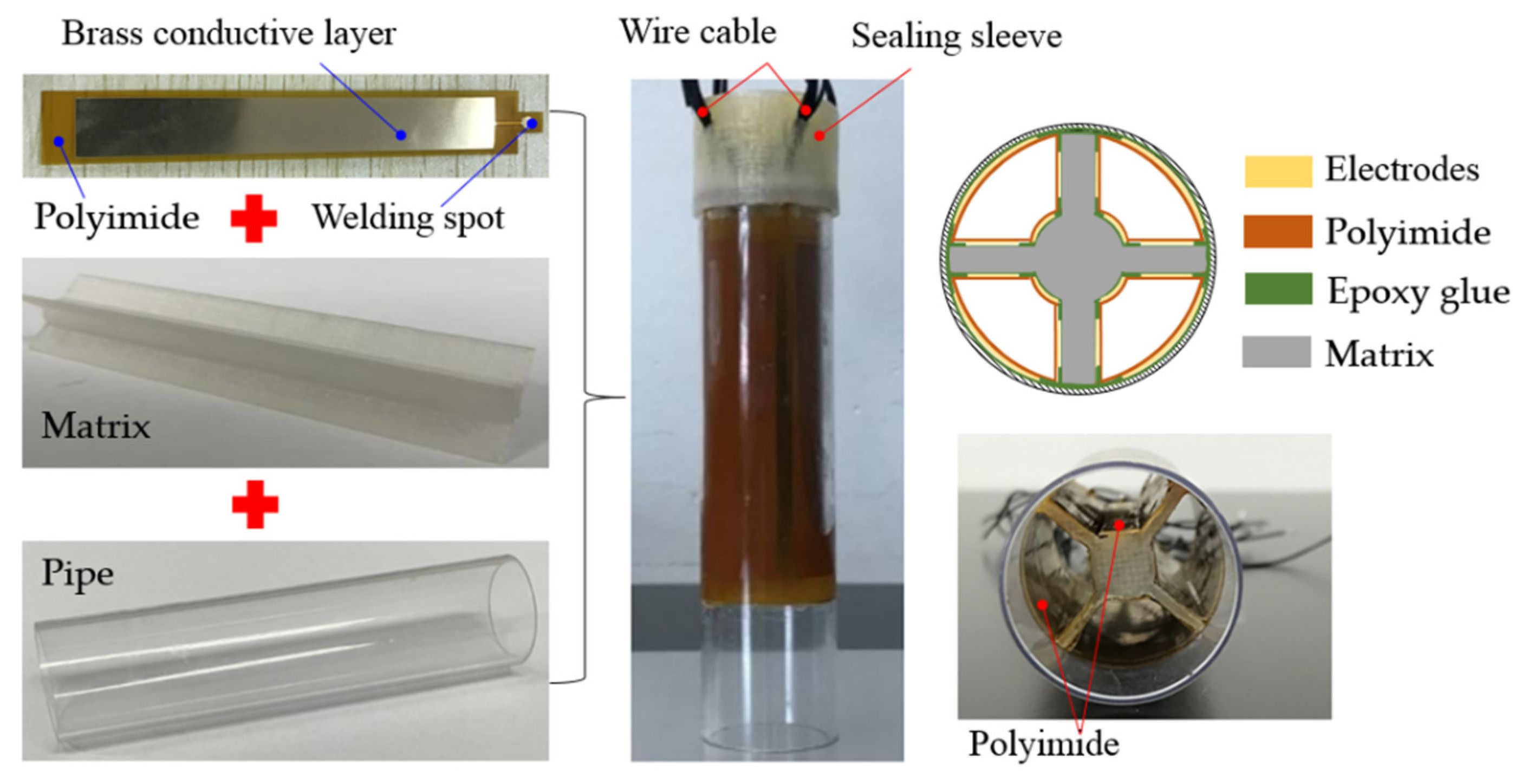
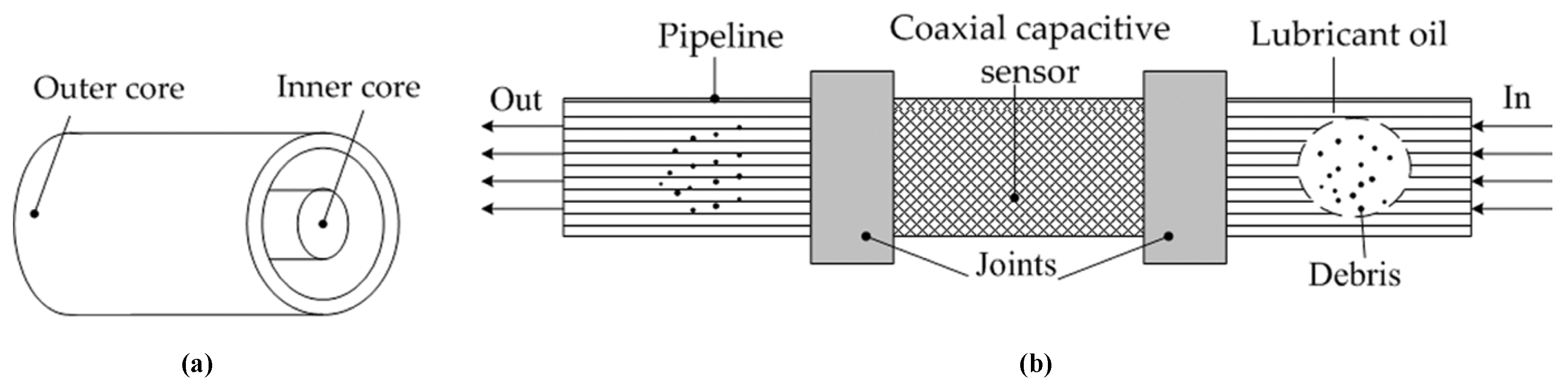
2.1. Structure Design of Coaxial Capacitive Sensor Network
2.2. Mathematical Model of the Capacitive Sensor Network
3. Numerical Simulation
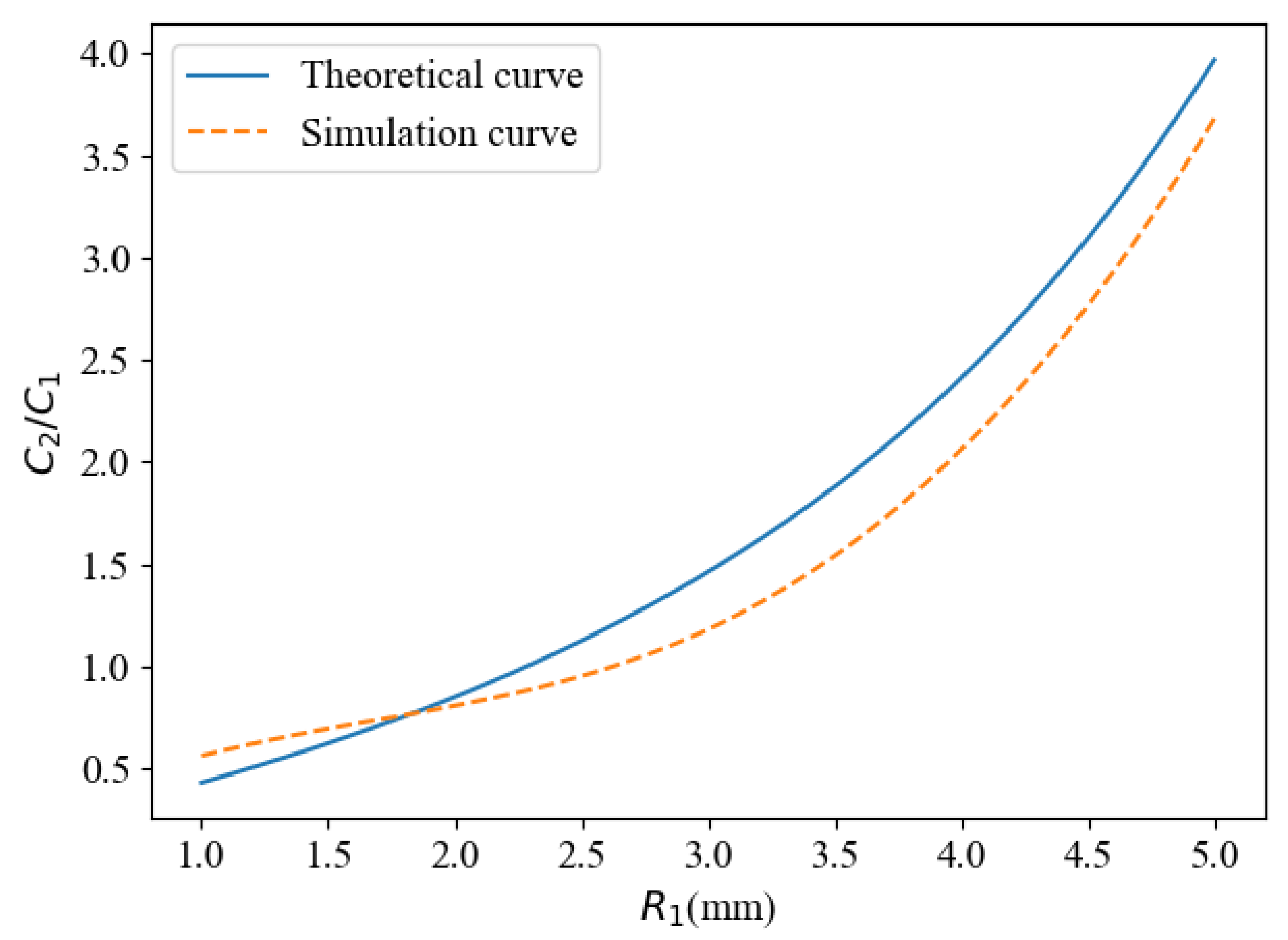
3.1. Parametric Analysis of Capacitive Sensor Network
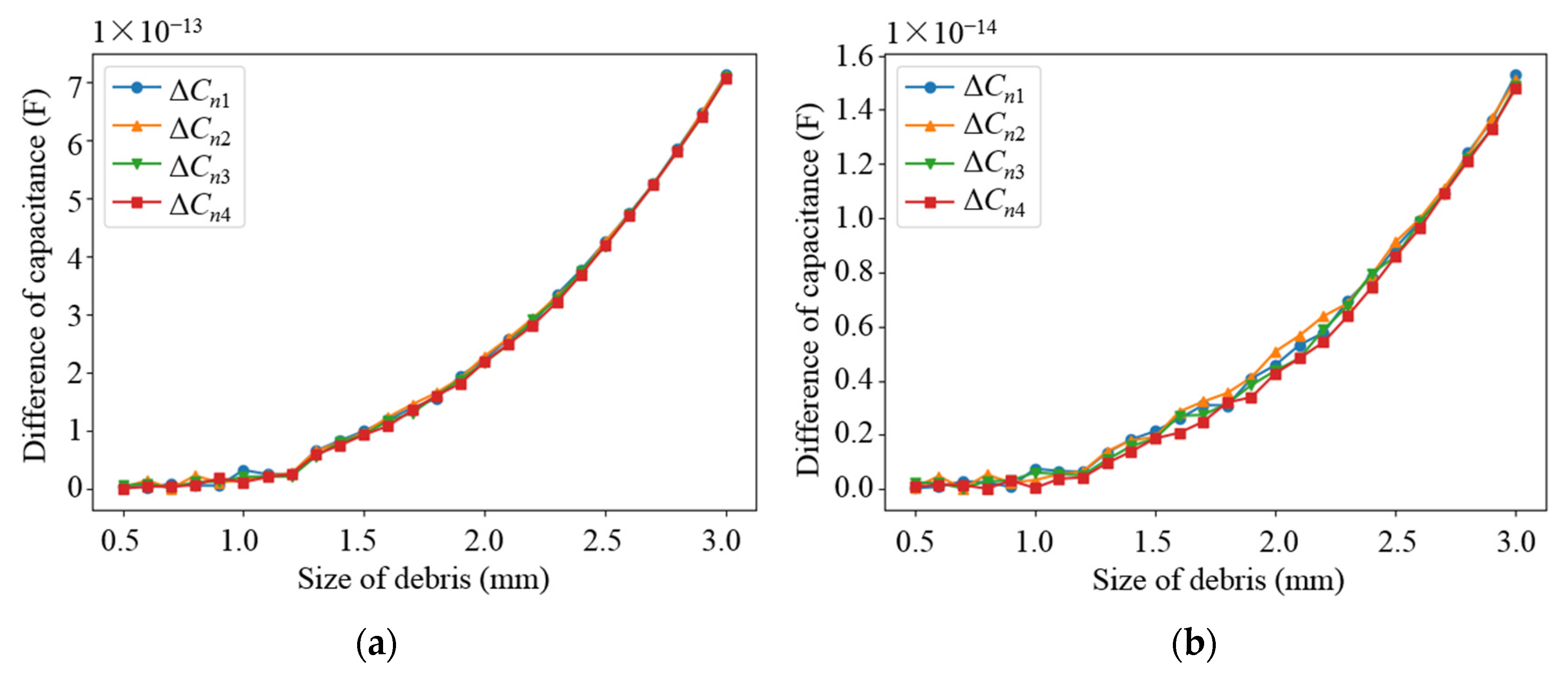
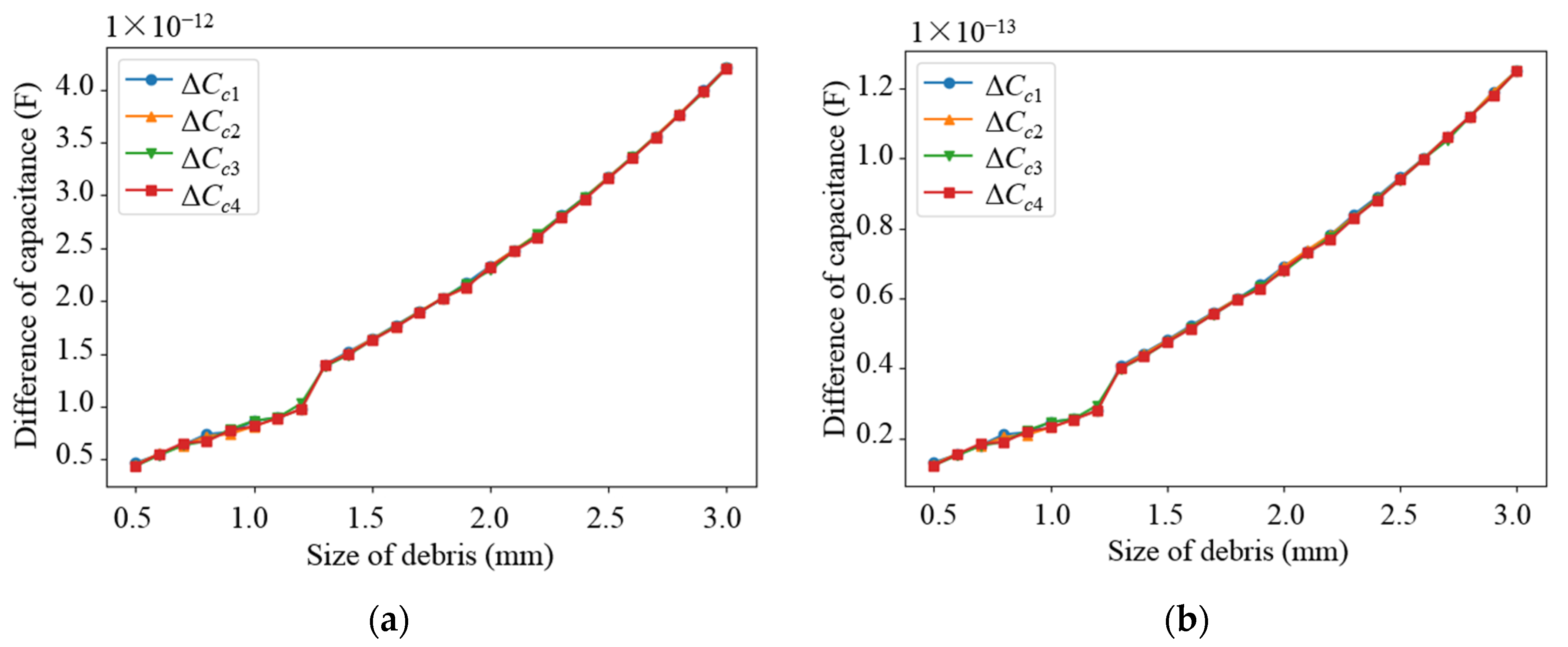
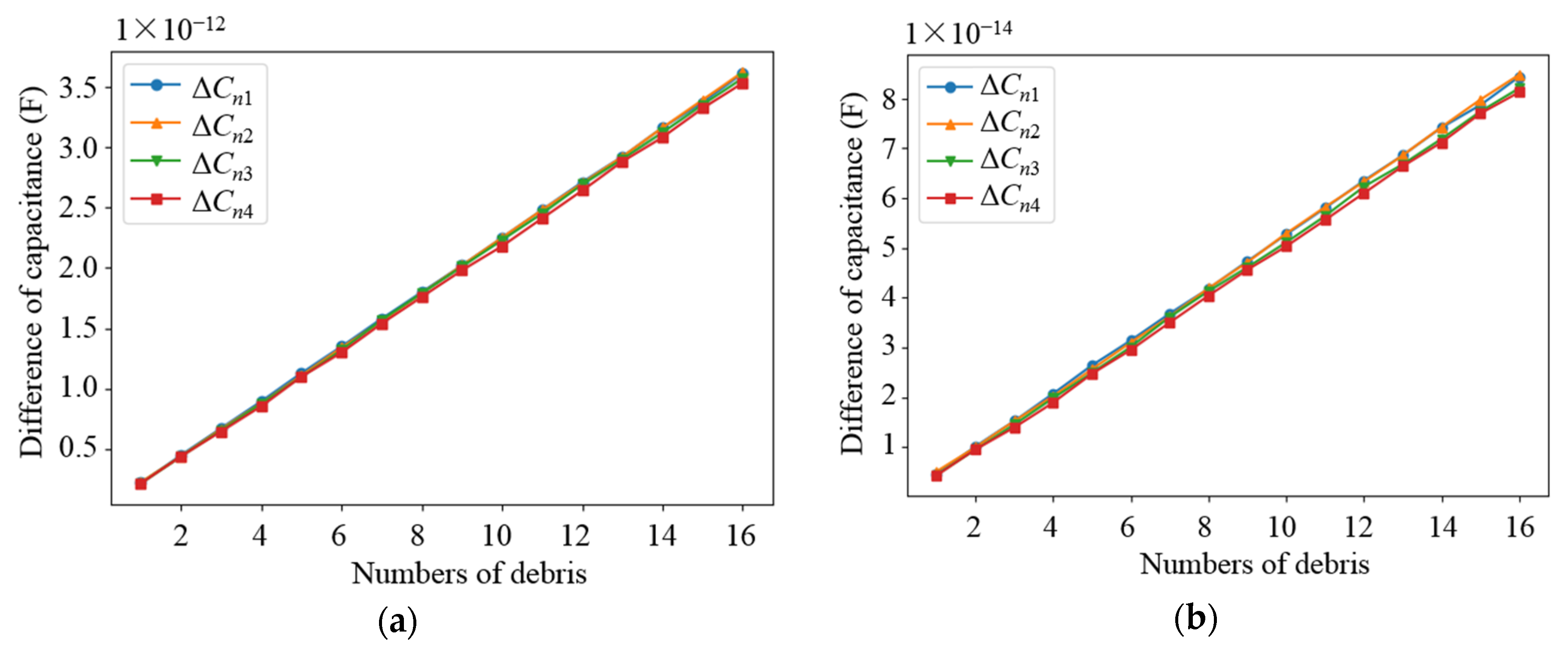
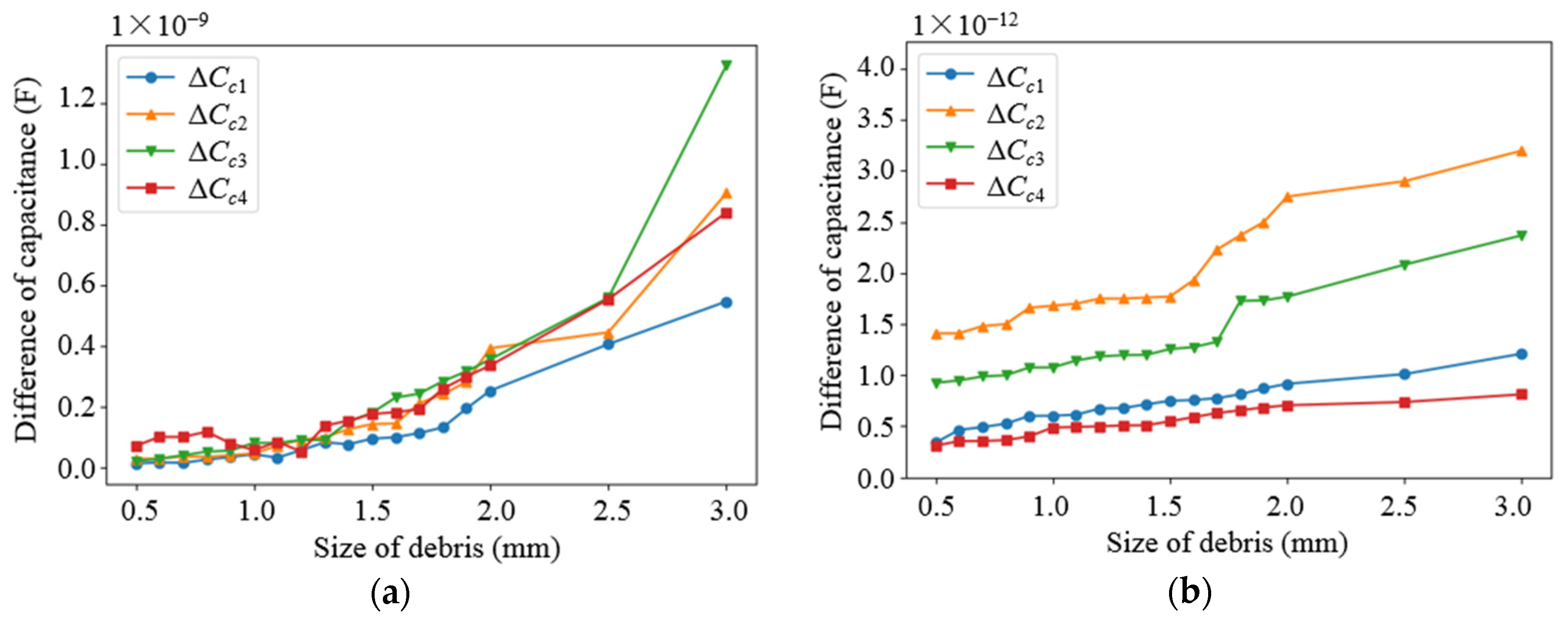
3.2. Numerical Simulation with Debris
4. Experiments
4.1. Experiment Setup
4.2. Frequency Selection
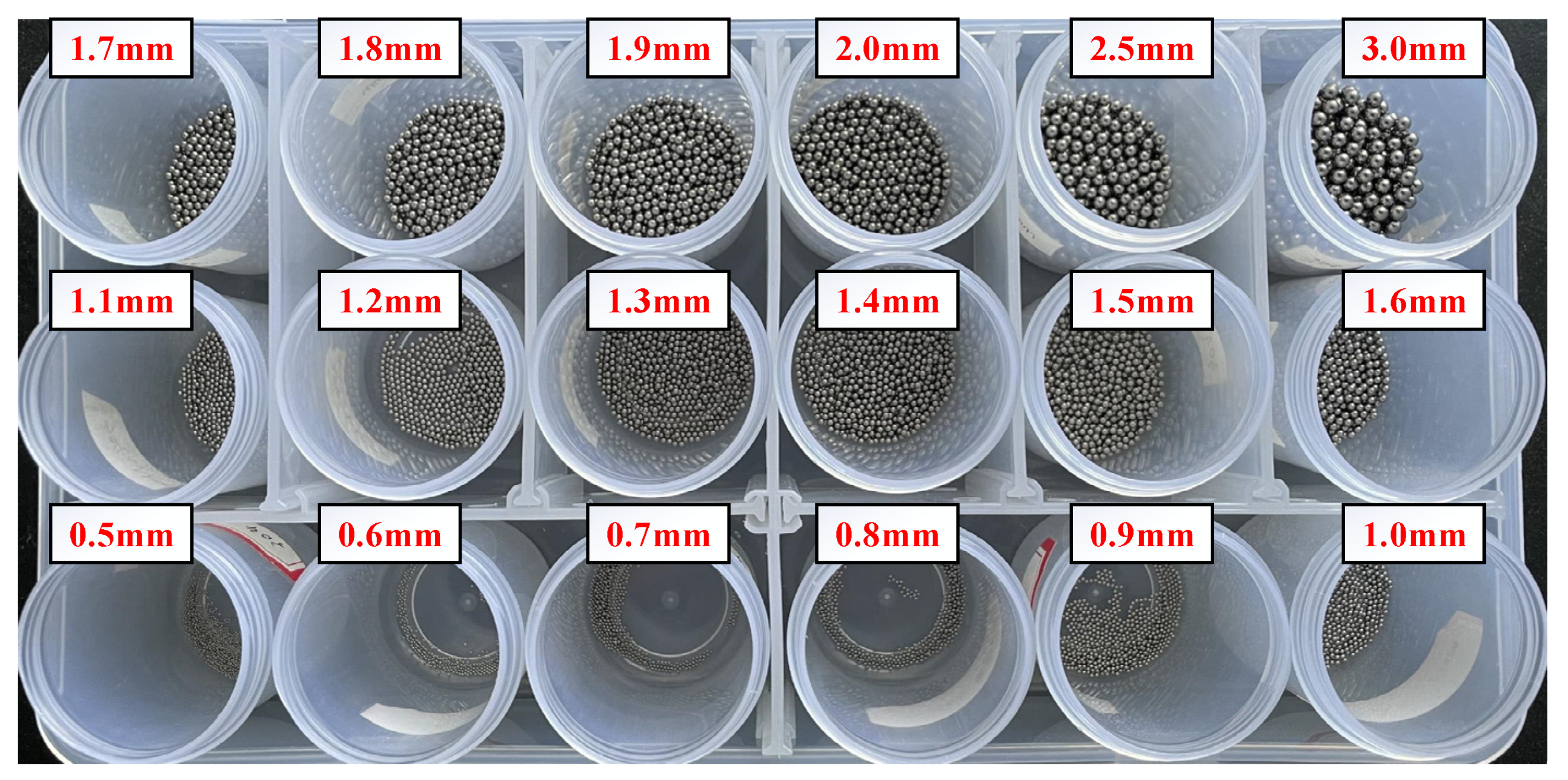
4.3. Debris Monitoring
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wakiru, J.M.; Pintelon, L.; Muchiri, P.N.; Chemweno, P.K. A review on lubricant condition monitoring information analysis for maintenance decision support. Mech. Syst. Signal Proc. 2019, 118, 108–132. [Google Scholar] [CrossRef]
- Matsumoto, K.; Tokunaga, T.; Kawabata, M. Engine Seizure Monitoring System Using Wear Debris Analysis and Particle Measurement; 0148–7191; SAE Technical Paper: Detroit, MI, USA, 2016. [Google Scholar]
- Guan, L.; Feng, X.L.; Xiong, G.; Xie, J.A. Application of dielectric spectroscopy for engine lubricating oil degradation monitoring. Sens. Actuators A Phys. 2011, 168, 22–29. [Google Scholar] [CrossRef]
- Hong, H.; Liang, M. A fractional calculus technique for on-line detection of oil debris. Meas. Sci. Technol. 2008, 19, 055703. [Google Scholar] [CrossRef]
- Iwai, Y.; Honda, T.; Miyajima, T.; Yoshinaga, S.; Higashi, M.; Fuwa, Y.J.T.I. Quantitative estimation of wear amounts by real time measurement of wear debris in lubricating oil. Tribol. Int. 2010, 43, 388–394. [Google Scholar] [CrossRef]
- Xu, C.; Zhang, P.; Wang, H.; Li, Y.; Lv, C.J.M.S.; Processing, S. Ultrasonic echo waveshape features extraction based on QPSO-matching pursuit for online wear debris discrimination. Tribol. Int. 2015, 60, 301–315. [Google Scholar] [CrossRef]
- Itomi, S. Oil Condition Sensor. U.S. Patent 20060125487, 19 December 2006. [Google Scholar]
- Huijie, M.; Hongfu, Z.; Han, W. Electrostatic Sensor Application for On-Line Monitoring of Wind Turbine Gearboxes. Sensors 2018, 18, 3574. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kayani, S.A. Using combined XRD-XRF analysis to identify meteorite ablation debris. In Proceedings of the 2009 International Conference on Emerging Technologies, Islamabad, Pakistan, 19–20 October 2009; pp. 219–220. [Google Scholar]
- Han, Z.; Wang, Y.; Qing, X. Characteristics study of in-situ capacitive sensor for monitoring lubrication oil debris. Sensors 2017, 17, 2851. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Han, Z.; Gao, T.; Qing, X. In-situ capacitive sensor for monitoring debris of lubricant oil. Ind. Lubr. Tribol. 2018, 70, 1310–1319. [Google Scholar] [CrossRef] [Green Version]
- Du, L.; Zhe, J. On-line wear debris detection in lubricating oil for condition based health monitoring of rotary machinery. Recent Pat. Electr. Eng. 2011, 4, 1–9. [Google Scholar] [CrossRef]
- Kitaljevich, D.; van Veldhuizen, G.J. Advanced Oil Debris Monitoring for Pipeline Mechanical Drive Gas Turbines. In Proceedings of the ASME Turbo Expo 2000: Power for Land, Sea, and Air, Munich, Germany, 8–11 May 2000. [Google Scholar]
- Murali, S.; Xia, X.; Jagtiani, A.V.; Carletta, J.; Zhe, J. Capacitive Coulter counting: Detection of metal wear particles in lubricant using a microfluidic device. Smart Mater. Struct. 2009, 18, 37001. [Google Scholar] [CrossRef]
- Islam, T.; Yousuf, M.; Nauman, M. A highly precise cross-capacitive sensor for metal debris detection in insulating oil. Rev. Sci. Instrum. 2020, 91, 25005. [Google Scholar] [CrossRef] [PubMed]
- Muthuvel, P.; George, B.; Ramadass, G. Magnetic-Capacitive Wear Debris Sensor Plug for Condition Monitoring of Hydraulic Systems. IEEE Sens. J. 2018, 18, 9120–9127. [Google Scholar] [CrossRef]
- Gao, T.; Han, Z.; Wu, D.; Li, Y.; Wang, Y. In situ collection and analysis of oil debris based on multi-physical field synthesis effect. J. Chin. Inst. Eng. 2020, 43, 339–345. [Google Scholar] [CrossRef]
- Stevan, S.; Paiter, L.; Galvão, J.; Roque, D.; Chaves, E.J.S. Sensor and methodology for dielectric analysis of vegetal oils submitted to thermal stress. Sensors 2015, 15, 26457–26477. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wenbo, M.; Yanshan, S.; Zhoumo, Z. Analysis of different size wear debris in oil by electrical capacitance tomography. J. Electron. Meas. Instrum. 2017, 31, 1984–1990. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value | Describe |
|---|---|---|
| ε0 | 8.854187817 × 10−12 F/m | Vacuum dielectric constant |
| ε | Variable | Dielectric relative permittivity |
| l | 80 mm | Sensor network length |
| R1 | Parameters to be determined | Inner core radius |
| R2 | 11 mm | Sensor network radius |
| U | Parameters to be determined | Excitation plate voltage |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Lin, T.; Wu, D.; Zhu, L.; Qing, X.; Xue, W. A New In Situ Coaxial Capacitive Sensor Network for Debris Monitoring of Lubricating Oil. Sensors 2022, 22, 1777. https://doi.org/10.3390/s22051777
Wang Y, Lin T, Wu D, Zhu L, Qing X, Xue W. A New In Situ Coaxial Capacitive Sensor Network for Debris Monitoring of Lubricating Oil. Sensors. 2022; 22(5):1777. https://doi.org/10.3390/s22051777
Chicago/Turabian StyleWang, Yishou, Tingwei Lin, Diheng Wu, Ling Zhu, Xinlin Qing, and Wendong Xue. 2022. "A New In Situ Coaxial Capacitive Sensor Network for Debris Monitoring of Lubricating Oil" Sensors 22, no. 5: 1777. https://doi.org/10.3390/s22051777
APA StyleWang, Y., Lin, T., Wu, D., Zhu, L., Qing, X., & Xue, W. (2022). A New In Situ Coaxial Capacitive Sensor Network for Debris Monitoring of Lubricating Oil. Sensors, 22(5), 1777. https://doi.org/10.3390/s22051777