
Mixed Fault Classification of Sensorless PMSM Drive in Dynamic Operations Based on External Stray Flux Sensors


Abstract
1. Introduction
1.1. Related Works
1.2. Contribution
- Increase the robustness of potential machine learning classifiers against transient operating conditions and different operation profiles by resampling at a fixed angular increment.
- Eliminate the need of position sensors in the resampling process (order tracking).
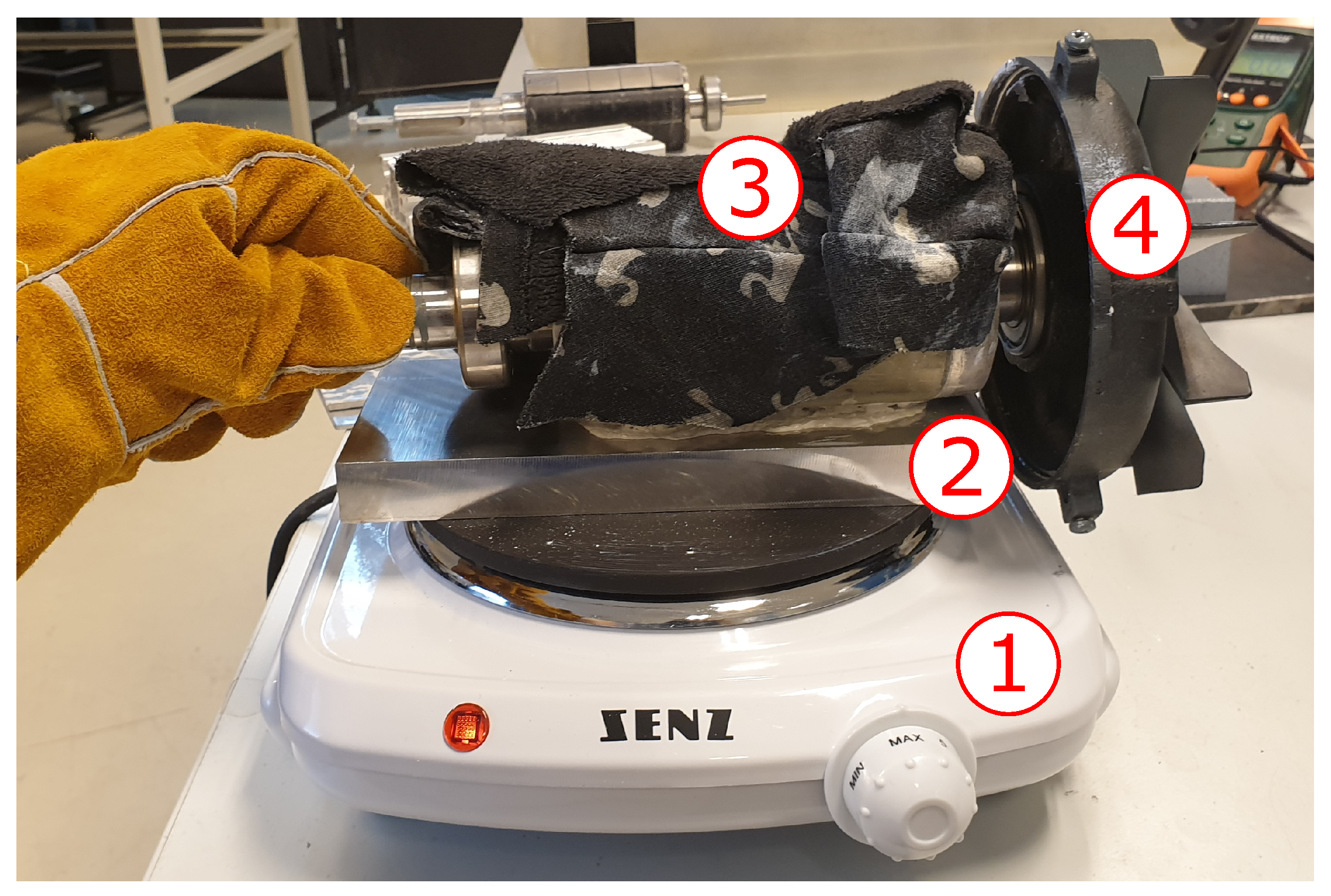
- Introduce a heat treatment method for inducing local partial demagnetisation fault.
- Train the machine learning algorithms, ensemble decision tree (EDT), k-nearest neighbour (KNN), support vector machine (SVM), and feedforward neural network (FNN) and compare their performance in different operation profiles and with or without the presence of mixed faults in the datasets.
- Investigate the variation of the classifier accuracy based on features computed from data collected by stray flux, current, and torque signals.
- Recommend minimum length of data sample for an accurate fault classification.
2. Methodology
2.1. Resampling Time-Series Data
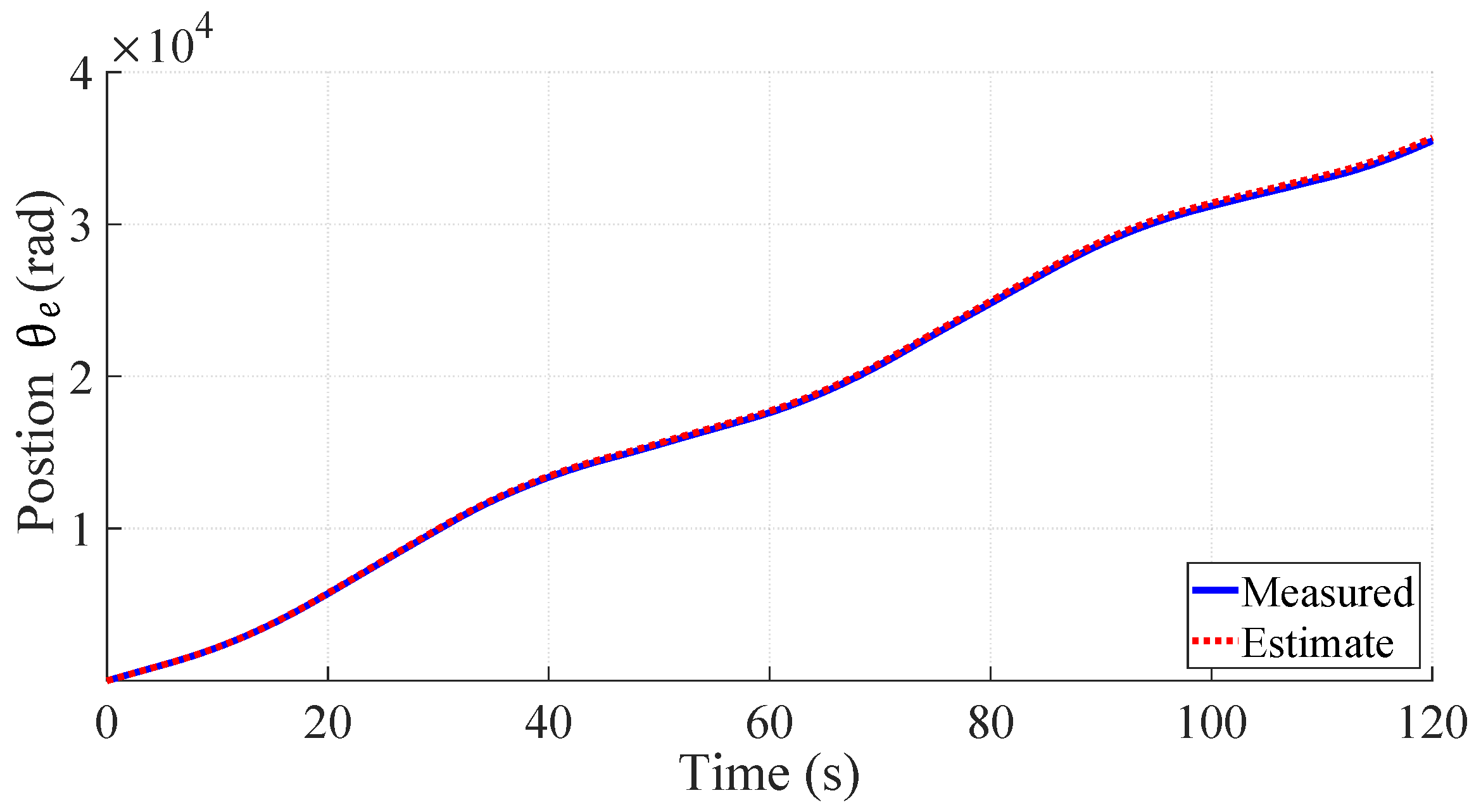
2.2. Estimation of Position
- Extract a small time sample with period T from the original time-series data.
- Compute the objective function for frequencies in the interval Hz with an incremental step of 5 Hz. The optimal for a given is found by the Golden Section Search in the interval . The values for and , that yield the smallest value of (2) are the initial guesses in step 3.
- Find the optimal solution for and by the Simplex Search method in [14] with the initial guesses given in step 2.
- Repeat step 1 to 3 for the next time step until the end of the time sample.
2.3. Machine Learning Methods
2.3.1. Ensemble Decision Tree
2.3.2. K-Nearest Neighbours
2.3.3. Support Vector Machine
2.3.4. Feedforward Neural Network
3. Implementation of Faults
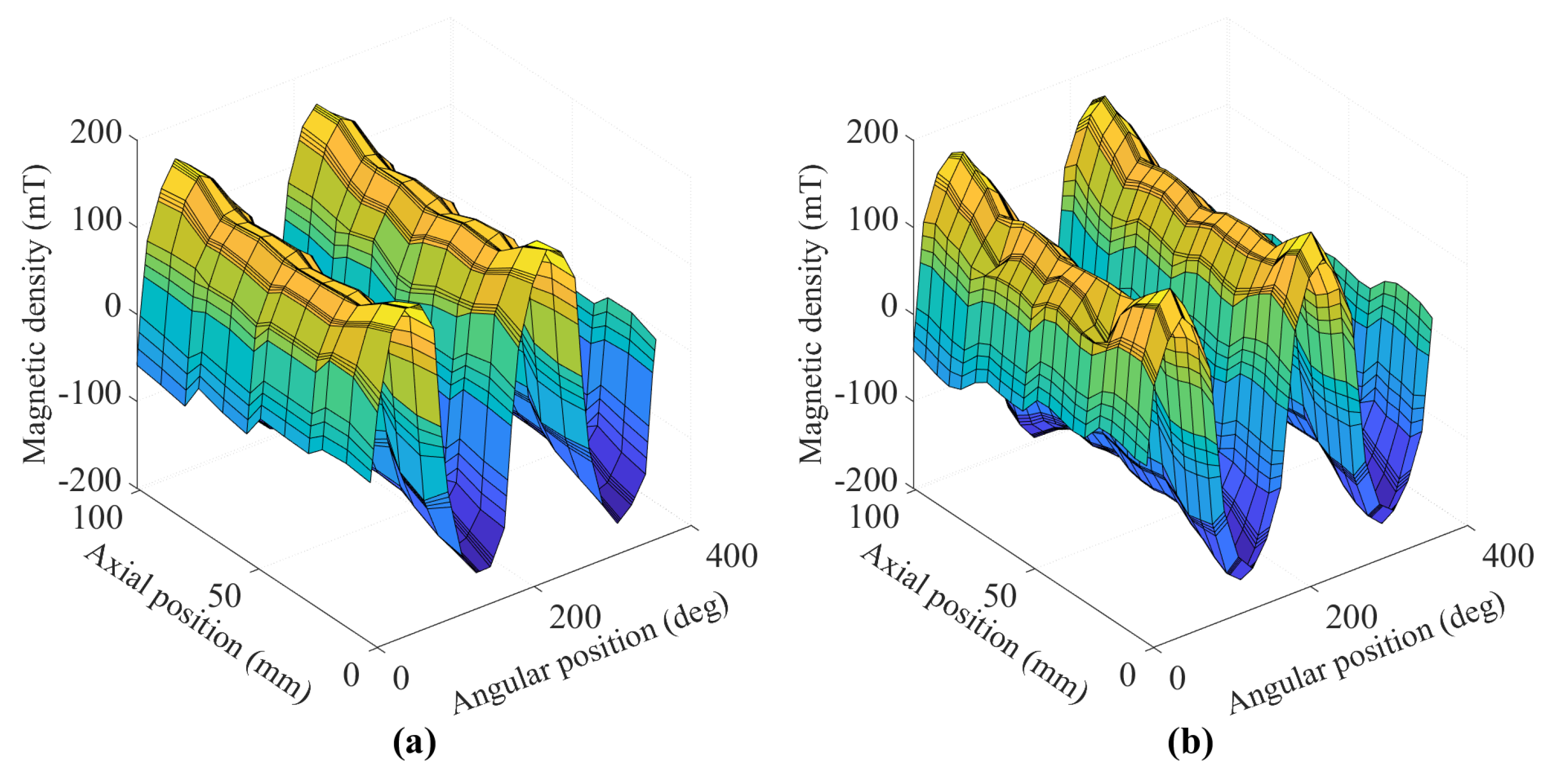
3.1. Implementing Local Demagnetisation
3.2. Implementing Short Circuit Fault
4. Experiment and Data Collection
4.1. In-House Test Bench
4.2. Description of Collected Datasets
5. Result and Discussion
5.1. Position Estimation
5.2. Comparing Physical Parameters
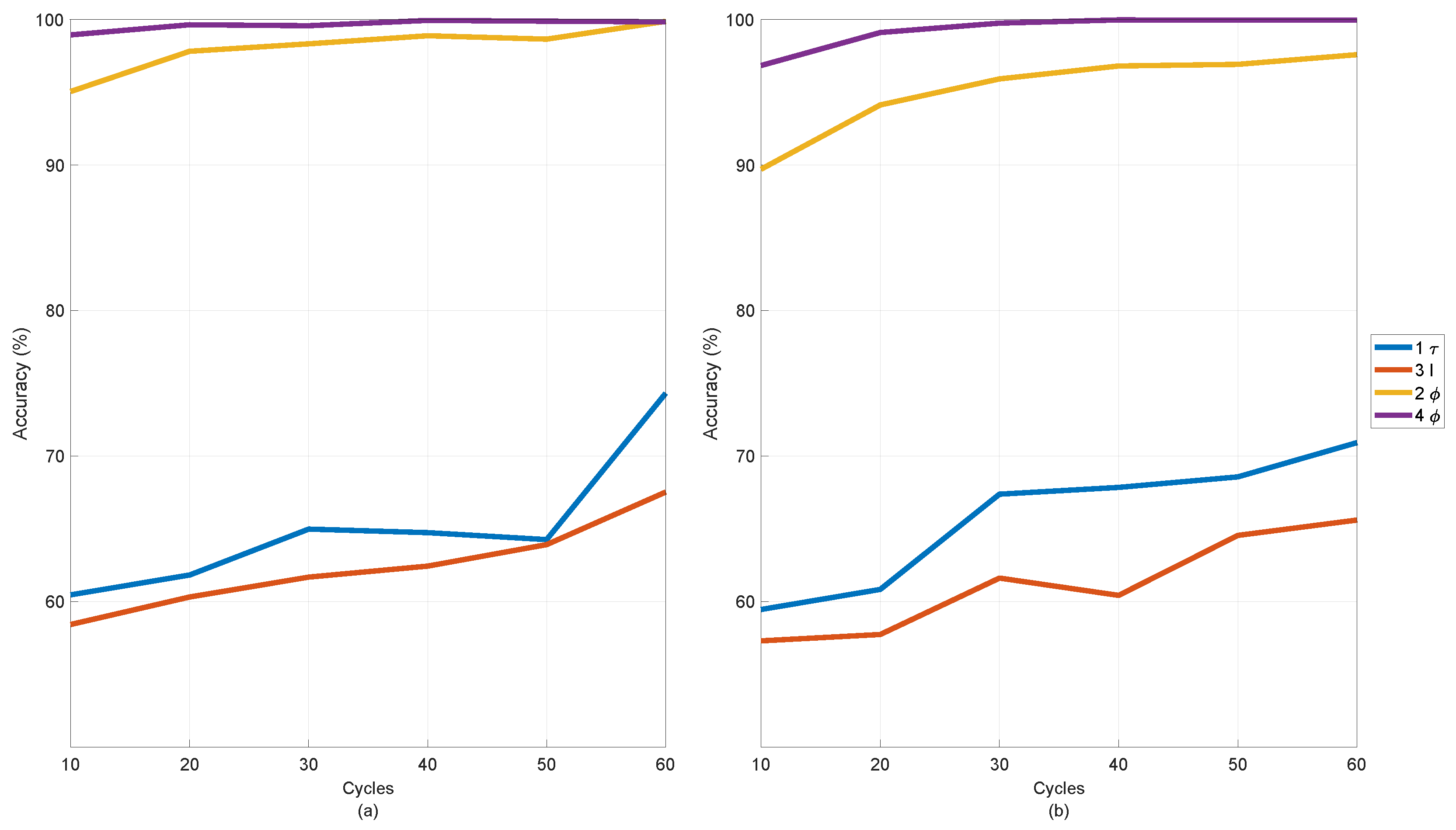
5.3. Required Samples for Fault Classification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| b | Bias vector in feedforward neural network |
| Fundamental frequency | |
| Activation function (Rectified linear unit) | |
| Element function describing fundamental component | |
| I | Phase current measurement |
| N | Number of neurons in a layer of an feedforward neural network |
| Measured resistance | |
| Resistance per strand in a phase winding | |
| , | Slit parts from |
| t | Time |
| Weight in the feedforward neural network | |
| Input data to the feedforward neural network | |
| Sample data | |
| y | Output of each neural in the feedforward neural network |
| Electrical position of the rotor | |
| Phase shift angle | |
| Number of shorted turns relative to total number of turns in phase windings | |
| Torque measurement | |
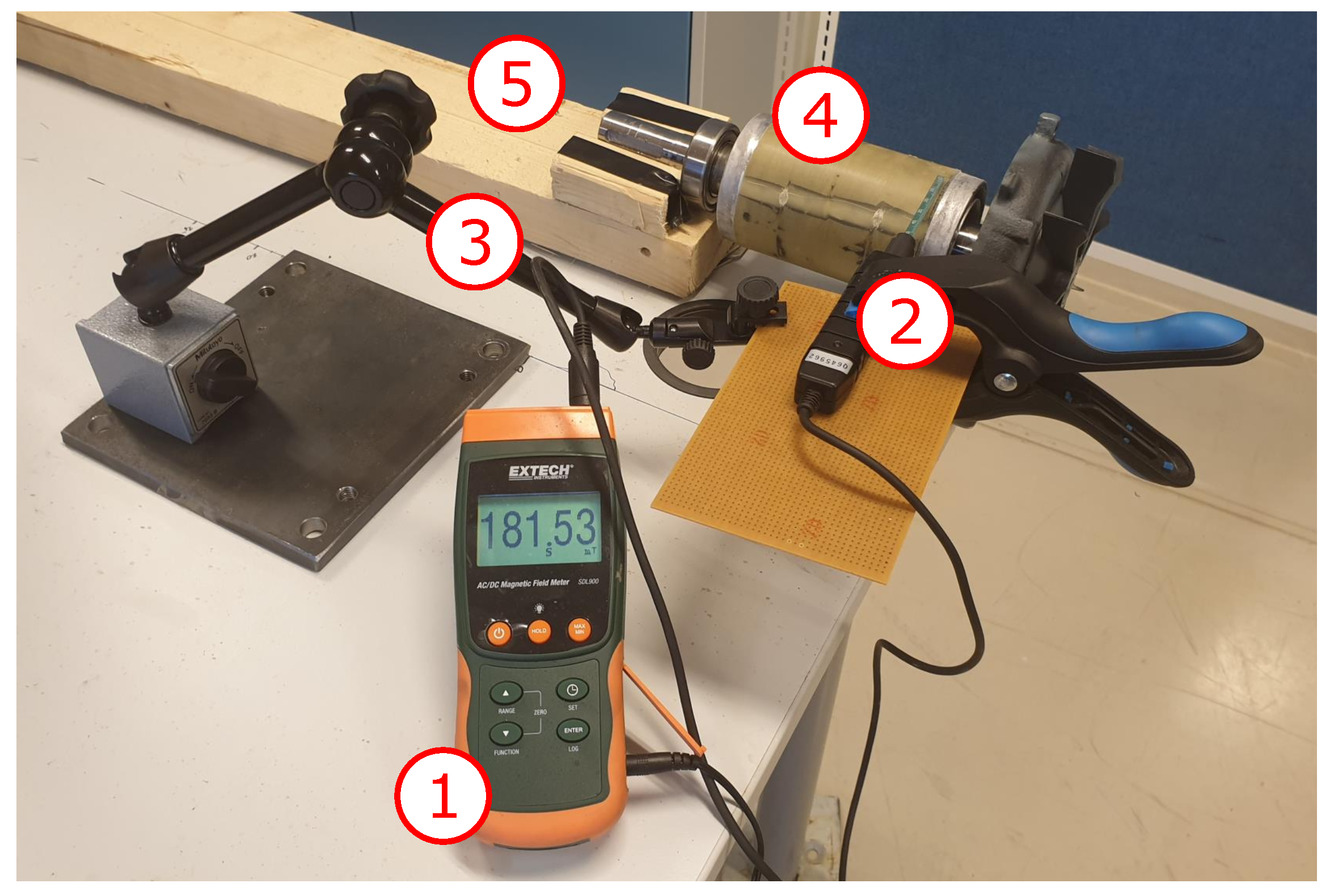
| Stray flux measurement |
References
- Lee, J.; Moon, S.; Jeong, H.; Kim, S.W. Robust Diagnosis Method Based on Parameter Estimation for an Interturn Short-Circuit Fault in Multipole PMSM under High-Speed Operation. Sensors 2015, 15, 29452–29466. [Google Scholar] [CrossRef] [PubMed]
- Bhuiyan, E.A.; Akhand, M.M.A.; Das, S.K.; Ali, M.F.; Tasneem, Z.; Islam, M.R.; Saha, D.K.; Badal, F.R.; Ahamed, M.H.; Moyeen, S.I. A Survey on Fault Diagnosis and Fault Tolerant Methodologies for Permanent Magnet Synchronous Machines. Int. J. Autom. Comput. 2020, 17, 763–787. [Google Scholar] [CrossRef]
- Van Der Geest, M.; Polinder, H.; Ferreira, J.A.; Veltman, A.; Wolmarans, J.J.; Tsiara, N. Analysis and neutral voltage-based detection of interturn faults in high-speed permanent-magnet machines with parallel strands. IEEE Trans. Ind. Electron. 2015, 62, 3862–3873. [Google Scholar] [CrossRef]
- Zhu, M.; Yang, B.; Hu, W.; Feng, G.; Kar, N.C. Vold-Kalman Filtering Order Tracking Based Rotor Demagnetization Detection in PMSM. IEEE Trans. Ind. Appl. 2019, 55, 5768–5778. [Google Scholar] [CrossRef]
- Kao, I.H.; Wang, W.J.; Lai, Y.H.; Perng, J.W. Analysis of Permanent Magnet Synchronous Motor Fault Diagnosis Based on Learning. IEEE Trans. Instrum. Meas. 2019, 68, 310–324. [Google Scholar] [CrossRef]
- Iglesias-Martinez, M.E.; Antonino-Daviu, J.; Fernandez de Cordoba, P.; Conejero, J.A.; Dunai, L. Automatic Classification of Winding Asymmetries in Wound Rotor Induction Motors based on Bicoherence and Fuzzy C-Means Algorithms of Stray Flux Signals. IEEE Trans. Ind. Appl. 2021, 9994, 1–11. [Google Scholar] [CrossRef]
- Zamudio-Ramirez, I.; Ramirez-Nunez, J.A.; Antonino-Daviu, J.; Osornio-Rios, R.A.; Quijano-Lopez, A.; Razik, H.; De Jesus Romero-Troncoso, R. Automatic Diagnosis of Electromechanical Faults in Induction Motors Based on the Transient Analysis of the Stray Flux via MUSIC Methods. IEEE Trans. Ind. Appl. 2020, 56, 3604–3613. [Google Scholar] [CrossRef]
- Gurusamy, V.; Bostanci, E.; Li, C.; Qi, Y.; Akin, B. A Stray Magnetic Flux-Based Robust Diagnosis Method for Detection and Location of Interturn Short Circuit Fault in PMSM. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Senanayaka, J.S.L.; Khang, H.V.; Robbersmyr, K.G. Fault detection and classification of permanent magnet synchronous motor in variable load and speed conditions using order tracking and machine learning. J. Phys. Conf. Ser. 2018, 1037, 032028. [Google Scholar] [CrossRef]
- Senanayaka, J.S.L.; Khang, H.V.; Robbersmyr, K.G. Multiple Classifiers and Data Fusion for Robust Diagnosis of Gearbox Mixed Faults. IEEE Trans. Ind. Inform. 2019, 15, 4569–4579. [Google Scholar] [CrossRef]
- Etien, E.; Allouche, A.; Rambault, L.; Doget, T.; Cauet, S.; Sakout, A. A Tacholess Order Analysis Method for PMSG Mechanical Fault Detection with Varying Speeds. Electronics 2021, 10, 418. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Zhao, J. Bearing fault diagnosis of a permanent magnet synchronous motor via a fast and online order analysis method in an embedded system. Mech. Syst. Signal Process. 2018, 113, 36–49. [Google Scholar] [CrossRef]
- Hou, B.; Wang, Y.; Tang, B.; Qin, Y.; Chen, Y.; Chen, Y. A tacholess order tracking method for wind turbine planetary gearbox fault detection. Measurement 2019, 138, 266–277. [Google Scholar] [CrossRef]
- Lagarias, J.C.; Reeds, J.A.; Wright, M.H.; Wright, P.E. Convergence Properties of the Nelder–Mead Simplex Method in Low Dimensions. SIAM J. Optim. 1998, 9, 112–147. [Google Scholar] [CrossRef]
- Quiroz, J.C.; Mariun, N.; Mehrjou, M.R.; Izadi, M.; Misron, N.; Mohd Radzi, M.A. Fault detection of broken rotor bar in LS-PMSM using random forests. Measurement 2018, 116, 273–280. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. On-line Detection and Classification of PMSM Stator Winding Faults Based on Stator Current Symmetrical Components Analysis and the KNN Algorithm. Electronics 2021, 10, 1786. [Google Scholar] [CrossRef]
- Senanayaka, J.S.L.; Khang, H.V.; Robbersmyr, K.G. Toward Self-Supervised Feature Learning for Online Diagnosis of Multiple Faults in Electric Powertrains. IEEE Trans. Ind. Inform. 2021, 17, 3772–3781. [Google Scholar] [CrossRef]
- Li, Z.; Xu, Y.; Jiang, X. Pattern Recognition of DC Partial Discharge on XLPE Cable Based on ADAM-DBN. Energies 2020, 13, 4566. [Google Scholar] [CrossRef]
- Park, Y.; Fernandez, D.; Lee, S.B.; Hyun, D.; Jeong, M.; Kommuri, S.K.; Cho, C.; Diaz Reigosa, D.; Briz, F. Online Detection of Rotor Eccentricity and Demagnetization Faults in PMSMs Based on Hall-Effect Field Sensor Measurements. IEEE Trans. Ind. Appl. 2019, 55, 2499–2509. [Google Scholar] [CrossRef]
- Moon, S.; Lee, J.; Jeong, H.; Kim, S.W. Demagnetization Fault Diagnosis of a PMSM Based on Structure Analysis of Motor Inductance. IEEE Trans. Ind. Electron. 2016, 63, 3795–3803. [Google Scholar] [CrossRef]
- Riba Ruiz, J.R.; Rosero, J.A.; Garcia Espinosa, A.; Romeral, L. Detection of demagnetization faults in permanent-Magnet synchronous motors under nonstationary conditions. IEEE Trans. Magn. 2009, 45, 2961–2969. [Google Scholar] [CrossRef]
- Fernandez, D.; Reigosa, D.; Tanimoto, T.; Kato, T.; Briz, F. Wireless permanent magnet temperature & field distribution measurement system for IPMSMs. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015; pp. 3996–4003. [Google Scholar] [CrossRef]
- Reigosa, D.D.; Fernandez, D.; Tanimoto, T.; Kato, T.; Briz, F. Permanent-Magnet Temperature Distribution Estimation in Permanent-Magnet Synchronous Machines Using Back Electromotive Force Harmonics. IEEE Trans. Ind. Appl. 2016, 52, 3093–3103. [Google Scholar] [CrossRef][Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Output power | 3 kW |
| Nominal speed | 3000 rpm |
| Number of poles | 4 |
| Nominal current | 6 A |
| Nominal voltage | 315 V |
| Phase resistance | 0.6 |
| Phase inductance | 6 mH |
| Number of Classes | EDT | KNN | SVM | FNN |
|---|---|---|---|---|
| 2 | 0.60 s | 0.011 s | 0.084 s | 1.3 s |
| 4 | 2.8 s | 0.010 s | 0.12 s | 2.1 s |
| Machine | Operation | Demagnetisation | ITSC | Mixed | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Learner | Profile | 1 | 3 I | 2 | 1 | 3 I | 2 | 1 | 3 I | 2 |
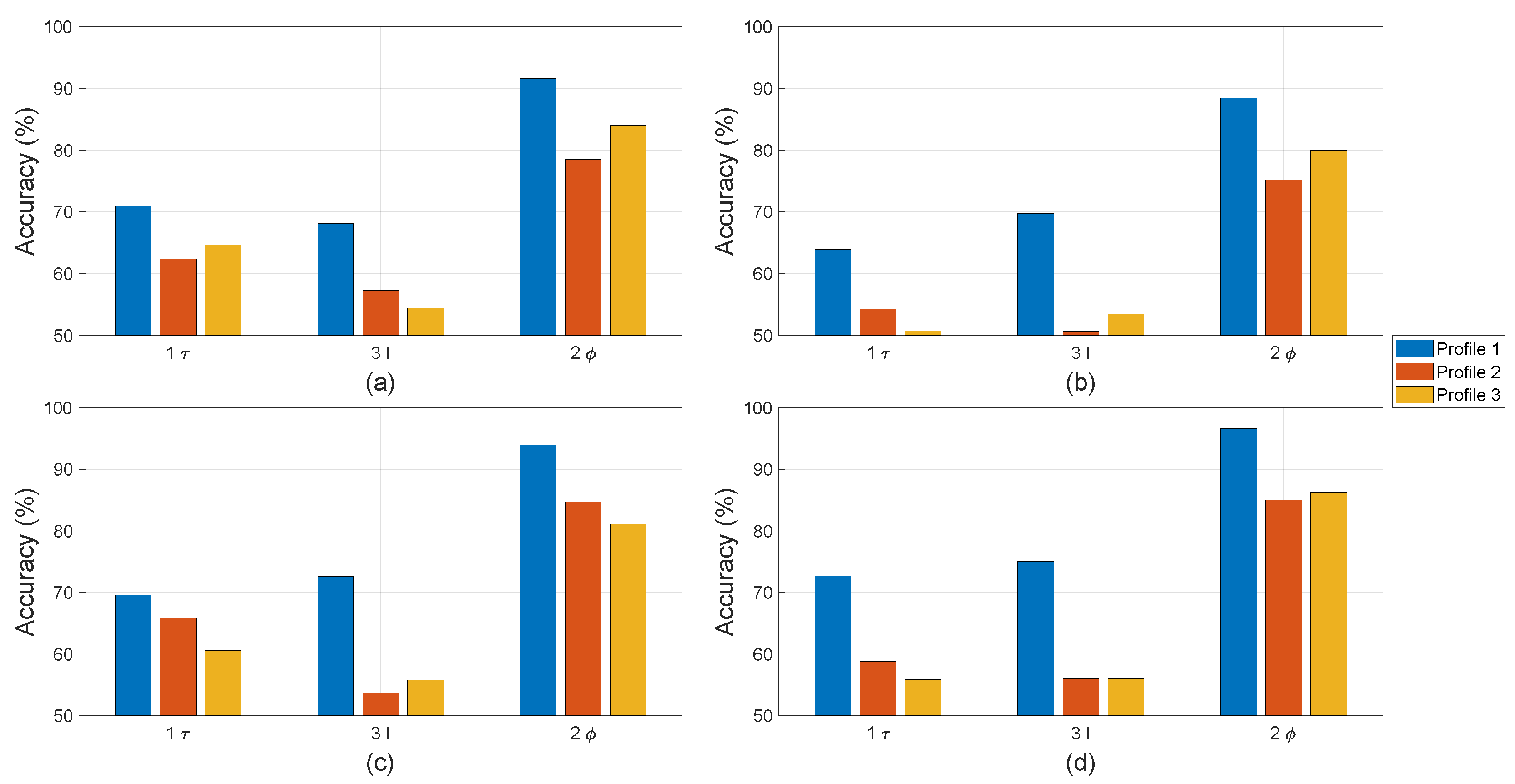
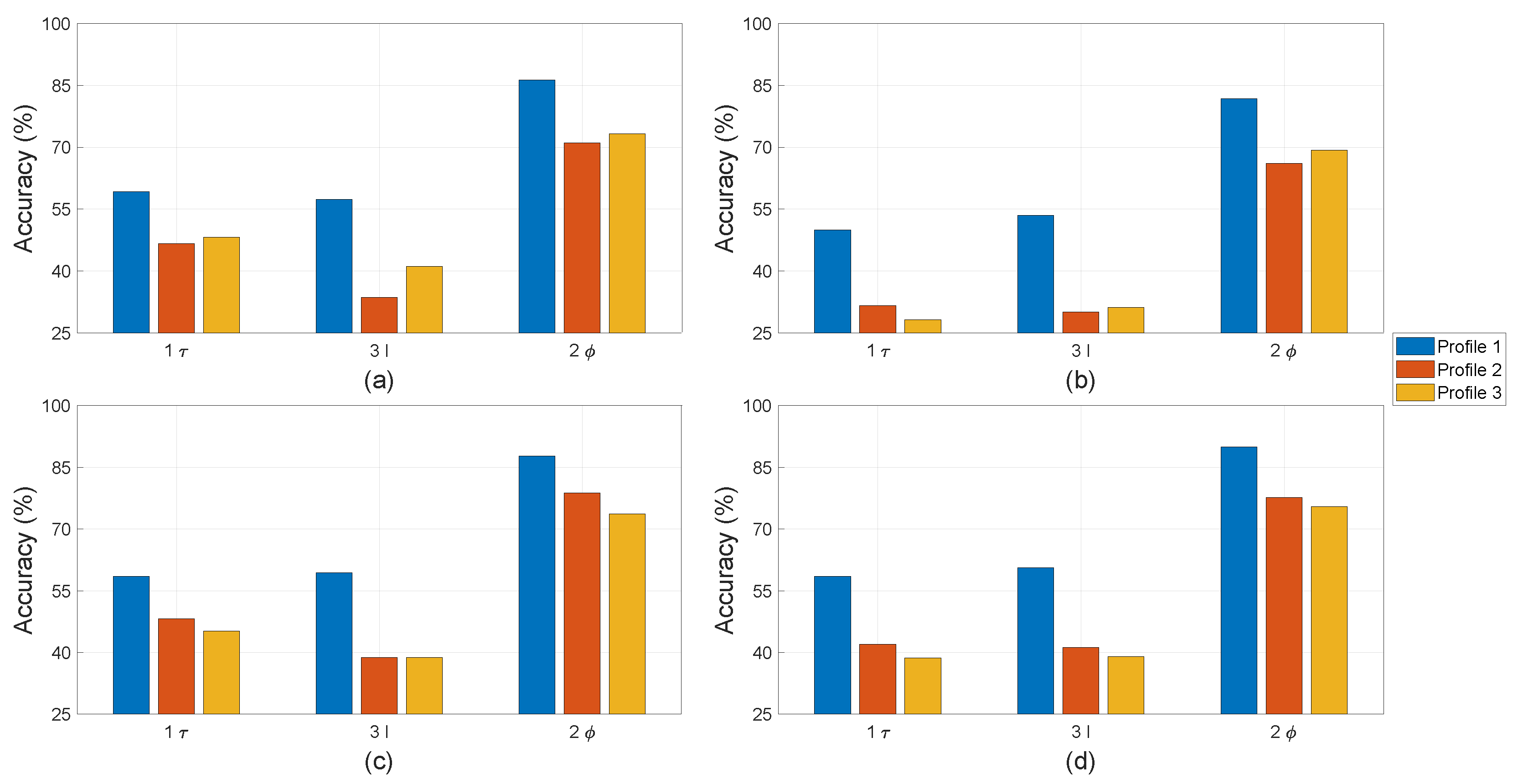
| 1 | 85.6 | 82.5 | 99.5 | 69.6 | 72.6 | 93.9 | 58.5 | 59.4 | 87.8 | |
| SVM | 2 | 76.9 | 66.1 | 99.4 | 65.9 | 53.7 | 84.7 | 48.2 | 38.8 | 78.7 |
| 3 | 76.3 | 64.5 | 96.4 | 60.6 | 55.8 | 81.1 | 45.2 | 38.7 | 73.7 | |
| 1 | 66.2 | 69.6 | 98.2 | 63.9 | 69.7 | 88.5 | 50.0 | 53.5 | 81.8 | |
| KNN | 2 | 58.4 | 56.2 | 98.3 | 54.3 | 50.6 | 75.2 | 31.6 | 30.1 | 66.1 |
| 3 | 56.0 | 60.5 | 96.5 | 50.7 | 53.5 | 80.0 | 28.2 | 31.2 | 69.2 | |
| 1 | 87.4 | 82.9 | 98.5 | 70.9 | 68.2 | 91.6 | 59.2 | 57.4 | 86.3 | |
| EDT | 2 | 80.8 | 61.2 | 98.0 | 62.3 | 57.3 | 78.5 | 46.6 | 33.6 | 71.1 |
| 3 | 80.8 | 71.1 | 93.7 | 64.7 | 54.4 | 84.0 | 48.2 | 41.1 | 73.2 | |
| 1 | 85.4 | 83.5 | 99.6 | 72.7 | 75.1 | 96.6 | 58.5 | 60.6 | 89.9 | |
| FNN | 2 | 74.1 | 68.1 | 99.9 | 58.8 | 56.0 | 85.0 | 42.0 | 41.2 | 77.7 |
| 3 | 71.2 | 66.5 | 97.5 | 55.9 | 56.0 | 86.3 | 38.7 | 39.0 | 75.4 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Attestog, S.; Senanayaka, J.S.L.; Van Khang, H.; Robbersmyr, K.G. Mixed Fault Classification of Sensorless PMSM Drive in Dynamic Operations Based on External Stray Flux Sensors. Sensors 2022, 22, 1216. https://doi.org/10.3390/s22031216
Attestog S, Senanayaka JSL, Van Khang H, Robbersmyr KG. Mixed Fault Classification of Sensorless PMSM Drive in Dynamic Operations Based on External Stray Flux Sensors. Sensors. 2022; 22(3):1216. https://doi.org/10.3390/s22031216
Chicago/Turabian StyleAttestog, Sveinung, Jagath Sri Lal Senanayaka, Huynh Van Khang, and Kjell G. Robbersmyr. 2022. "Mixed Fault Classification of Sensorless PMSM Drive in Dynamic Operations Based on External Stray Flux Sensors" Sensors 22, no. 3: 1216. https://doi.org/10.3390/s22031216
APA StyleAttestog, S., Senanayaka, J. S. L., Van Khang, H., & Robbersmyr, K. G. (2022). Mixed Fault Classification of Sensorless PMSM Drive in Dynamic Operations Based on External Stray Flux Sensors. Sensors, 22(3), 1216. https://doi.org/10.3390/s22031216