
Vibration-Based Loosening Detection of a Multi-Bolt Structure Using Machine Learning Algorithms



Abstract
:1. Introduction
2. Theoretical Background and Signal Processing
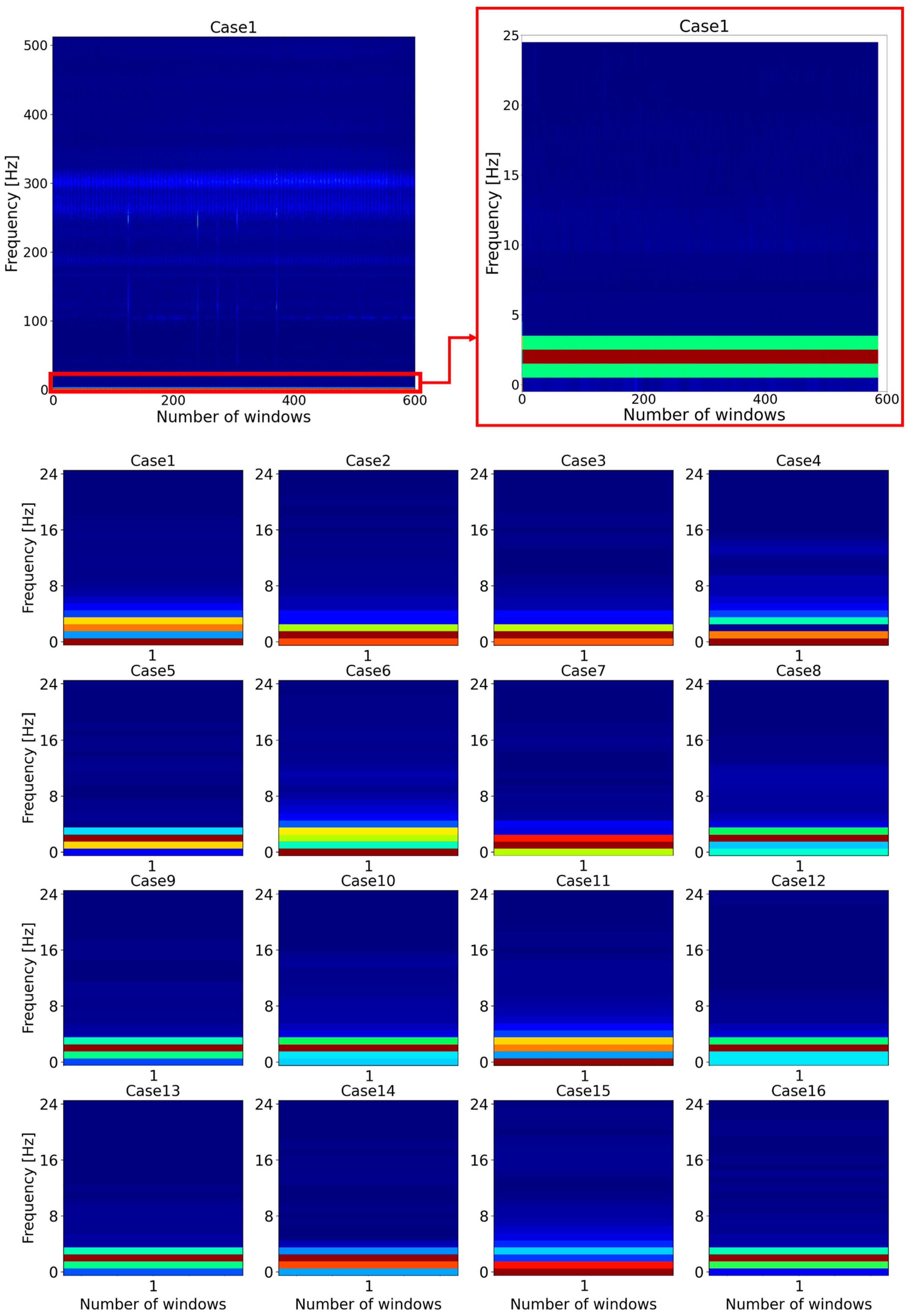
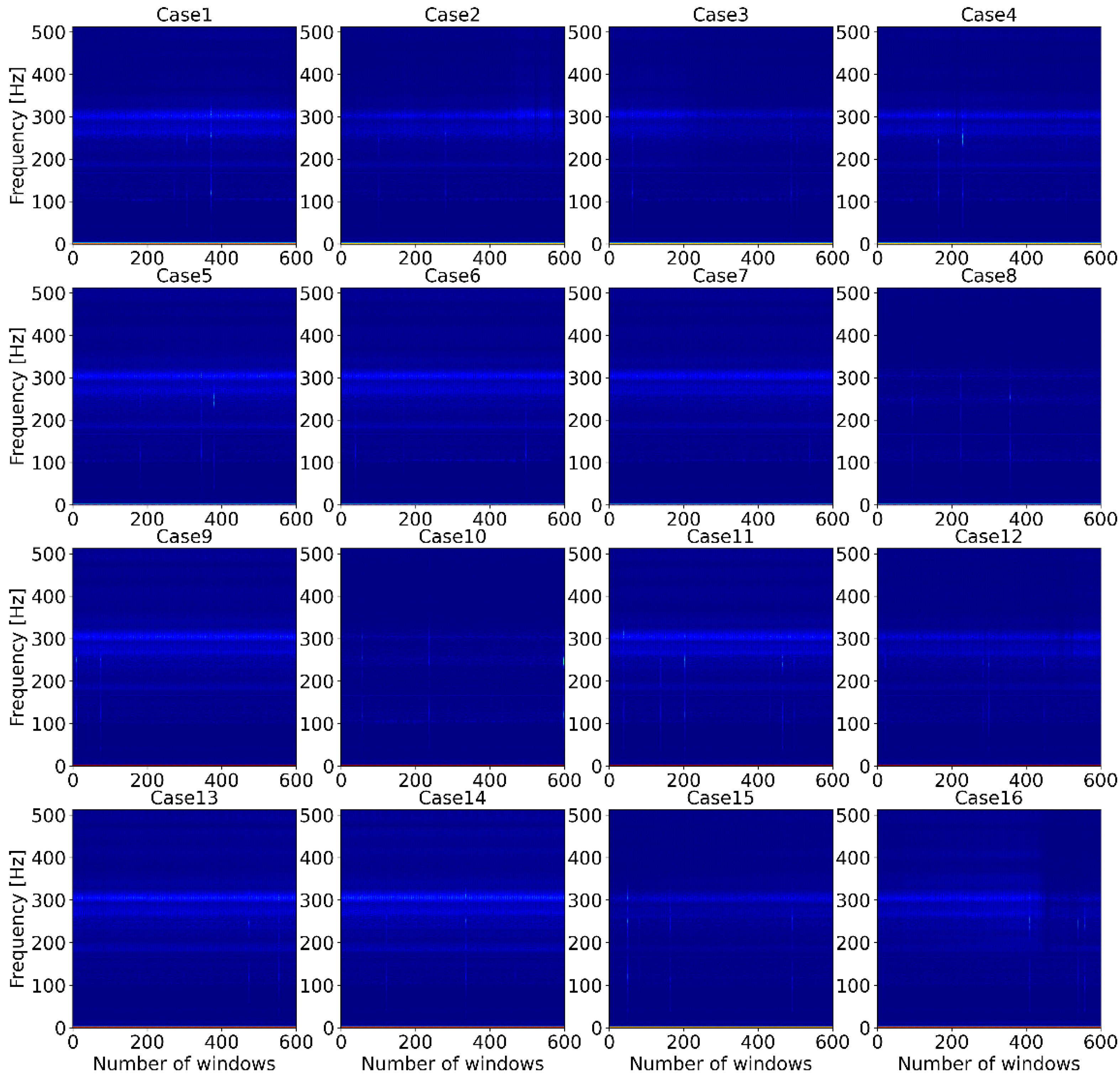
2.1. Feature Extraction (STFT)
2.2. Machine Learning
3. Experimental Setup
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, Y.; Gao, Q.; Guan, Z. Self-Loosening Failure Analysis of Bolt Joints under Vibration considering the Tightening Process. Shock Vib. 2017, 2017, 2038421. [Google Scholar] [CrossRef] [Green Version]
- Park, J.H.; Kim, T.H.; Kim, J.T. Image-based bolt-loosening detection technique of bolt joint in steel bridges. Int. Conf. Adv. Exp. Struct. Eng. 2015, 1, 1–2. [Google Scholar]
- Kong, Q.; Zhu, J.; Ho, S.C.; Song, G. Tapping and listening: A new approach to bolt looseness monitoring. Smart Mater. Struct. 2018, 27, 07LT02. [Google Scholar] [CrossRef]
- Wang, T.; Song, G.; Liu, S.; Li, Y.; Xiao, H. Review of bolted connection monitoring. Int. J. Distrib. Sens. Netw. 2013, 9, 871213. [Google Scholar] [CrossRef]
- Pham, H.C.; Huyunh, T.C. Bolt-Loosening Monitoring Framework Using an Image-Based Deep Learning and Graphical Model. Sensors 2020, 20, 3382. [Google Scholar] [CrossRef]
- Park, J.H.; Huynh, T.C.; Choi, S.H.; Kim, J.T. Vision-based technique for bolt-loosening detection in wind turbine tower. Wind Struct 2015, 21, 709–726. [Google Scholar] [CrossRef]
- Cha, Y.J.; You, K.; Choi, W. Vision-based detection of loosened bolts using the Hough transform and support vector machines. Autom. Constr. 2016, 71, 181–188. [Google Scholar] [CrossRef]
- Lee, S.Y.; Huynh, T.C.; Park, J.H.; Kim, J.T. Bolt-Loosening Detection using Vision-Based Deep Learning Algorithm and Image Processing Method. J. Comput. Struct. Eng. Inst. Korea 2019, 32, 265–272. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, X.; Loh, K.J.; Su, W.; Xue, Z.; Zhao, X. Autonomous bolt loosening detection using deep learning. Struct. Health Monit. 2020, 19, 105–122. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, Y.; Wang, N. Bolt loosening angle detection technology using deep learning. Struct. Control Health Monit. 2019, 26, e2292. [Google Scholar] [CrossRef] [Green Version]
- Nichols, J.M.; Nichols, C.J.; Todd, M.D.; Seaver, M.; Trickey, S.T.; Virgin, L.N. Use of data-driven phase space models in assessing the strength of a bolted connection in a composite beam. Smart Mater. Struct. 2004, 13, 241–250. [Google Scholar] [CrossRef]
- Razi, P.; Esmaeel, R.A.; Taheri, F. Improvement of a vibration-based damage detection approach for health monitoring of bolted flange joints in pipelines. Struct. Health Monit. 2013, 12, 207–224. [Google Scholar] [CrossRef]
- Chaki, S.; Corneloup, G.; Lillamand, I.; Walaszek, H. Combination of longitudinal and transverse ultrasonic waves for in situ control of the tightening of bolts. J. Press. Vessel Technol. Trans. ASME 2007, 129, 383–390. [Google Scholar] [CrossRef]
- Jhang, K.Y.; Quan, H.H.; Ha, J.; Kim, N.Y. Estimation of clamping force in high-tension bolts through ultrasonic velocity measurement. Ultrasonics 2006, 44, 1339–1342. [Google Scholar] [CrossRef]
- Bhalla, S.; Vittal, P.A.; Veljkovic, M. Piezo-impedance transducers for residual fatigue life assessment of bolted steel joints. Struct. Health Monit. 2012, 11, 733–750. [Google Scholar] [CrossRef]
- Ritdumrongkul, S.; Abe, M.; Fujino, Y.; Miyashita, T. Quantitative health monitoring of bolted joints using a piezoceramic actuator-sensor. Smart Mater. Struct. 2004, 13, 20–29. [Google Scholar] [CrossRef]
- Wang, F.; Song, G. Bolt early looseness monitoring using modified vibro-acoustic modulation by time-reversal. Mech. Syst. Signal Process. 2019, 130, 349–360. [Google Scholar] [CrossRef]
- Wang, F.; Ho, S.C.M.; Huo, L.; Song, G. A Novel Fractal Contact-Electromechanical Impedance Model for Quantitative Monitoring of Bolted Joint Looseness. IEEE Access 2018, 6, 40212–40220. [Google Scholar] [CrossRef]
- He, K.; Zhu, W.D. Detecting loosening of bolted connections in a pipeline using changes in natural frequencies. J. Vib. Acoust. Trans. ASME 2014, 136, 1–8. [Google Scholar] [CrossRef]
- Sejdić, E.; Djurović, I.; Jiang, J. Time-frequency feature representation using energy concentration: An overview of recent advances. Digit. Signal Process. 2009, 19, 153–183. [Google Scholar] [CrossRef]
- Chen, Z.; Li, C.; Sanchez, R. Gearbox Fault Identification and Classification with Convolutional Neural Networks. Shock Vib. 2015, 2015, 390134. [Google Scholar] [CrossRef] [Green Version]
- Ma, S.; Chu, F. Ensemble deep learning-based fault diagnosis of rotor bearing systems. Comput. Ind. 2019, 105, 143–152. [Google Scholar] [CrossRef]
- Liang, L.; Wen, H.; Liu, F.; Li, G.; Li, M. Feature extraction of impulse faults for vibration signals based on sparse non-negative tensor factorization. Appl. Sci. 2019, 9, 3642. [Google Scholar] [CrossRef] [Green Version]
- Dass, S.; Holi, M.S.; Rajan, K.S.; Prof, A. A Comparative Study on FFT, STFT and WT for the Analysis of Auditory Evoked Potentials. IJERT 2013, 2, 636–641. [Google Scholar]
- Indra Devi, M.; Rajaram, R.; Selvakuberan, K. Machine learning techniques for automated web page classification using URL features. In Proceedings of the International Conference on Computational Intelligence and Multimedia Applications (ICCIMA 2007), Sivakasi, India, 13–15 December 2007; Volume 2, pp. 116–118. [Google Scholar]
- Shovon, T.H.; Al Nazi, Z.; Dash, S.; Hossain, M.F. Classification of motor imagery EEG signals with multi-input convolutional neural network by augmenting STFT. In Proceedings of the 2019 5th International Conference on Advances in Electrical Engineering (ICAEE), Dhaka, Bangladesh, 26–28 September 2019; pp. 398–403. [Google Scholar]
- Huang, J.; Chen, B.; Yao, B.; He, W. ECG Arrhythmia Classification Using STFT-Based Spectrogram and Convolutional Neural Network. IEEE Access 2019, 7, 92871–92880. [Google Scholar] [CrossRef]
- Encyclopedia of Vibration|ScienceDirect. Available online: https://www.sciencedirect.com/referencework/9780122270857/encyclopedia-of-vibration (accessed on 20 January 2022).
- Rao, B. Machine Learning Algorithms: A Review. Int. J. Comput. Sci. Inf. Technol. 2016, 7, 1174–1179. [Google Scholar]
- Mahesh, B. Machine Learning Algorithms—A Review. Int. J. Sci. Res. 2020, 9, 381–386. [Google Scholar]
- Yang, B.S.; Di, X.; Han, T. Random forests classifier for machine fault diagnosis. J. Mech. Sci. Technol. 2008, 22, 1716–1725. [Google Scholar] [CrossRef]
- Tianqi Chen, C.G. XGBoost: A Scalable Tree Boosting System. J. Assoc. Phys. India 2016, 42, 665. [Google Scholar]
- Zhang, D.; Qian, L.; Mao, B.; Huang, C.; Huang, B.; Si, Y. A Data-Driven Design for Fault Detection of Wind Turbines Using Random Forests and XGboost. IEEE Access 2018, 6, 21020–21031. [Google Scholar] [CrossRef]
- Zhao, W.; Chellappa, R.; Nandhakumar, N. Empirical performance analysis of linear discriminant classifier. In Proceedings of the 1998 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Santa Barbara, CA, USA, 25 June 1998; pp. 164–169. [Google Scholar]
- Casoli, P.; Pastori, M.; Scolari, F.; Rundo, M. A vibration signal-based method for fault identification and classification in hydraulic axial piston pumps. Energies 2019, 12, 953. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Iteam | Specifications |
|---|---|
| Name | HIGEN AC Servo Motor |
| Type | FMATN20-AB00 |
| Capacity | 1.8 kW |
| Torque | 11.5 N·m |
| Max. Speed | 1500 rpm |
| Serial No. | 02003001 (ID:74) |
| Case No. | Bolt 1 | Bolt 2 | Bolt 3 | Bolt 4 |
|---|---|---|---|---|
| #1 | ● | ● | ● | ● |
| #2 | ○ | ● | ● | ● |
| #3 | ● | ○ | ● | ● |
| #4 | ● | ● | ○ | ○ |
| #5 | ● | ● | ● | ○ |
| #6 | ○ | ○ | ● | ● |
| #7 | ● | ○ | ○ | ● |
| #8 | ● | ● | ○ | ○ |
| #9 | ○ | ● | ○ | ● |
| #10 | ○ | ● | ● | ○ |
| #11 | ● | ○ | ● | ○ |
| #12 | ○ | ○ | ○ | ○ |
| #13 | ● | ○ | ○ | ○ |
| #14 | ○ | ● | ○ | ○ |
| #15 | ○ | ○ | ● | ○ |
| #16 | ○ | ○ | ○ | ● |
| Number | Classifiers |
|---|---|
| 1 | Random Forest |
| 2 | Bagged Trees |
| 3 | Decision Tree |
| 4 | KNeighbor |
| 5 | Linear Discriminant Analysis |
| 6 | Support Vector Machine |
| 7 | XGBoost |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eraliev, O.; Lee, K.-H.; Lee, C.-H. Vibration-Based Loosening Detection of a Multi-Bolt Structure Using Machine Learning Algorithms. Sensors 2022, 22, 1210. https://doi.org/10.3390/s22031210
Eraliev O, Lee K-H, Lee C-H. Vibration-Based Loosening Detection of a Multi-Bolt Structure Using Machine Learning Algorithms. Sensors. 2022; 22(3):1210. https://doi.org/10.3390/s22031210
Chicago/Turabian StyleEraliev, Oybek, Kwang-Hee Lee, and Chul-Hee Lee. 2022. "Vibration-Based Loosening Detection of a Multi-Bolt Structure Using Machine Learning Algorithms" Sensors 22, no. 3: 1210. https://doi.org/10.3390/s22031210
APA StyleEraliev, O., Lee, K.-H., & Lee, C.-H. (2022). Vibration-Based Loosening Detection of a Multi-Bolt Structure Using Machine Learning Algorithms. Sensors, 22(3), 1210. https://doi.org/10.3390/s22031210