
Simulation Tool and Online Demonstrator for CDMA-Based Ultrasonic Indoor Localization Systems

 ,
,  , and
, and
Abstract
:1. Introduction
- Integration in a single simulation platform of a large variety of real-world issues and configurable parameters that affect the design and behavior of acoustic positioning systems. The platform also deals with the high-level processing stage regarding peak detection and positioning estimation.
- Design of a remotely configurable UIPS that can be managed from a website to obtain preliminary experimental results, and to compare diverse signal designs by different authors under the same setup.
- Validation of simulated results against the corresponding experimental tests obtained with the online demonstrator.
2. Related Work
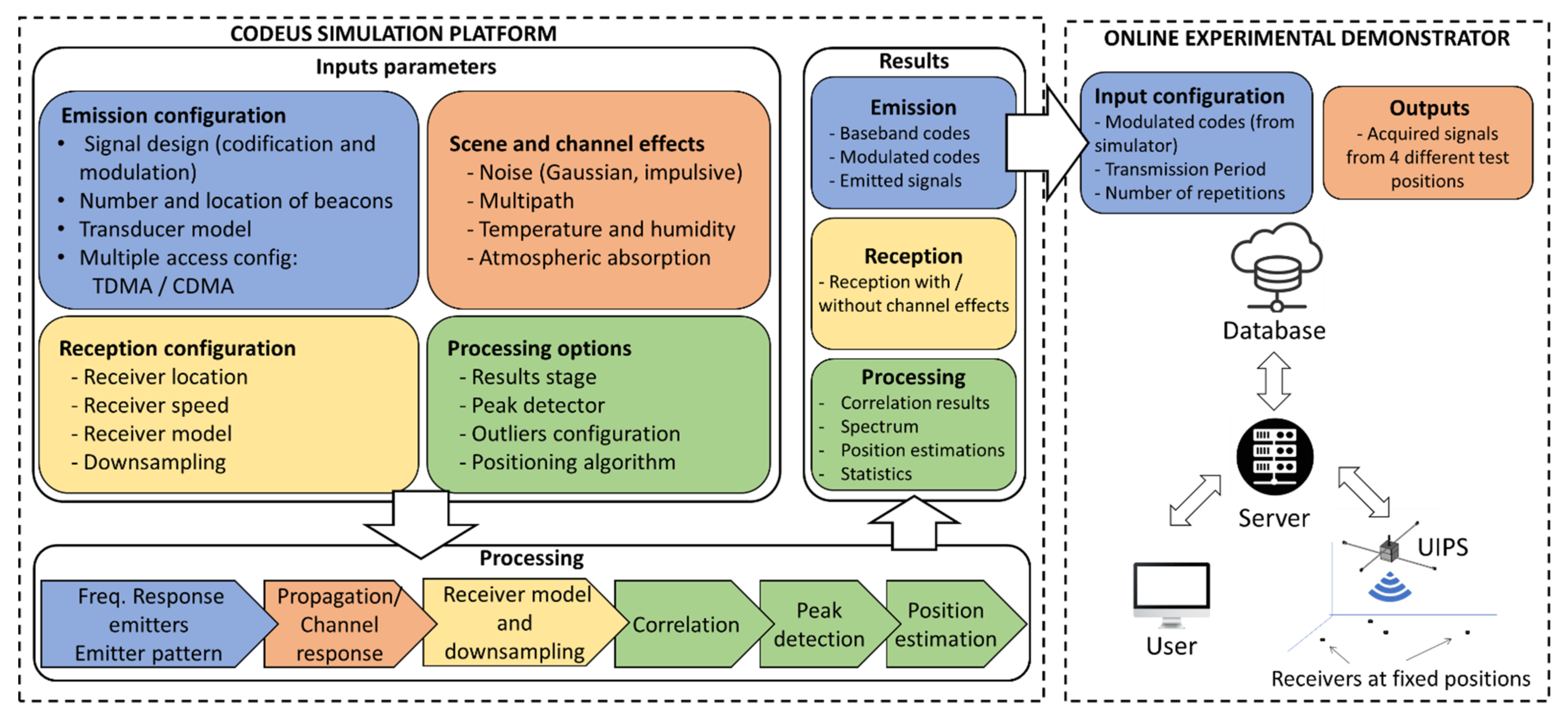
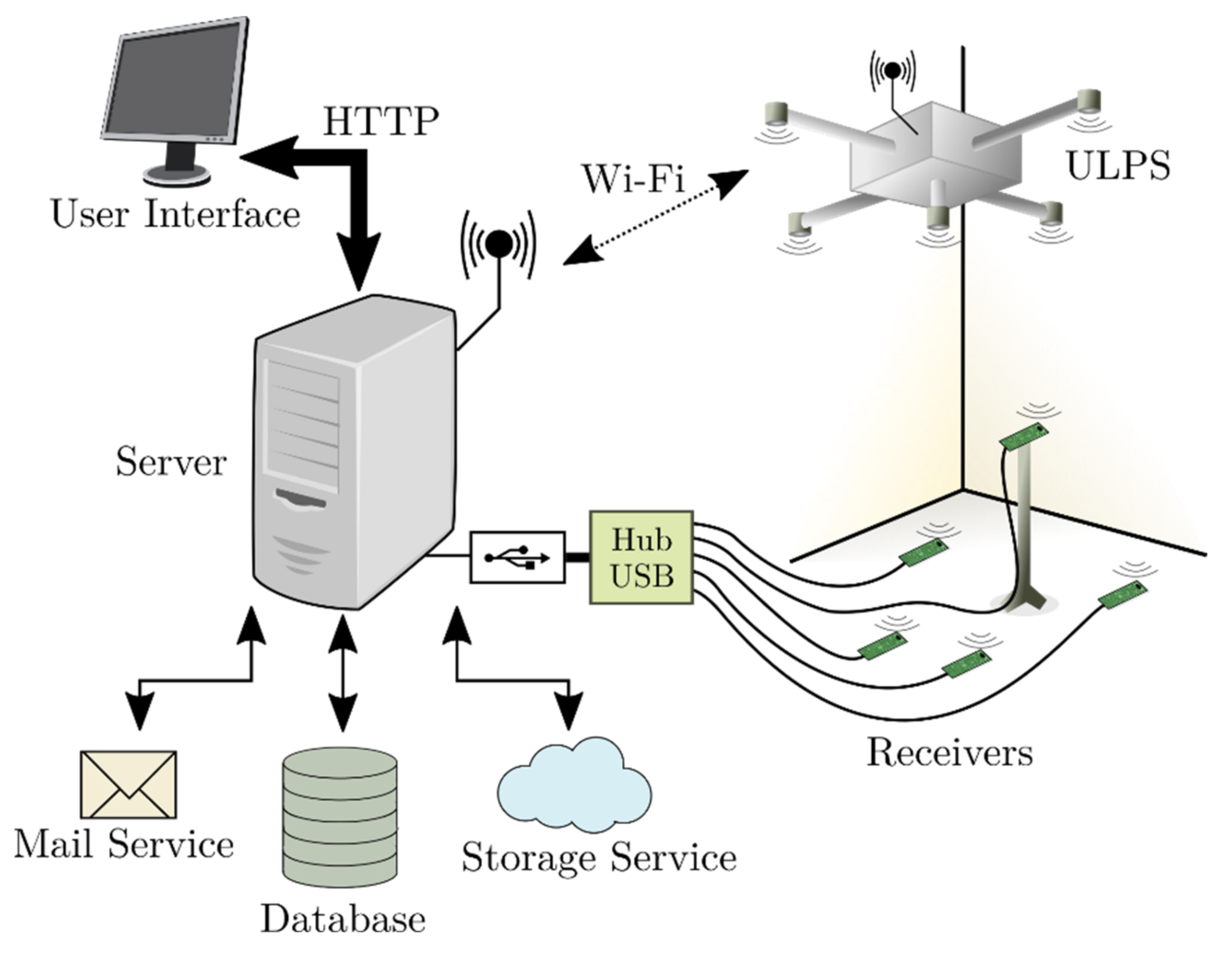
3. CODEUS Platform Overview
4. Simulation Platform
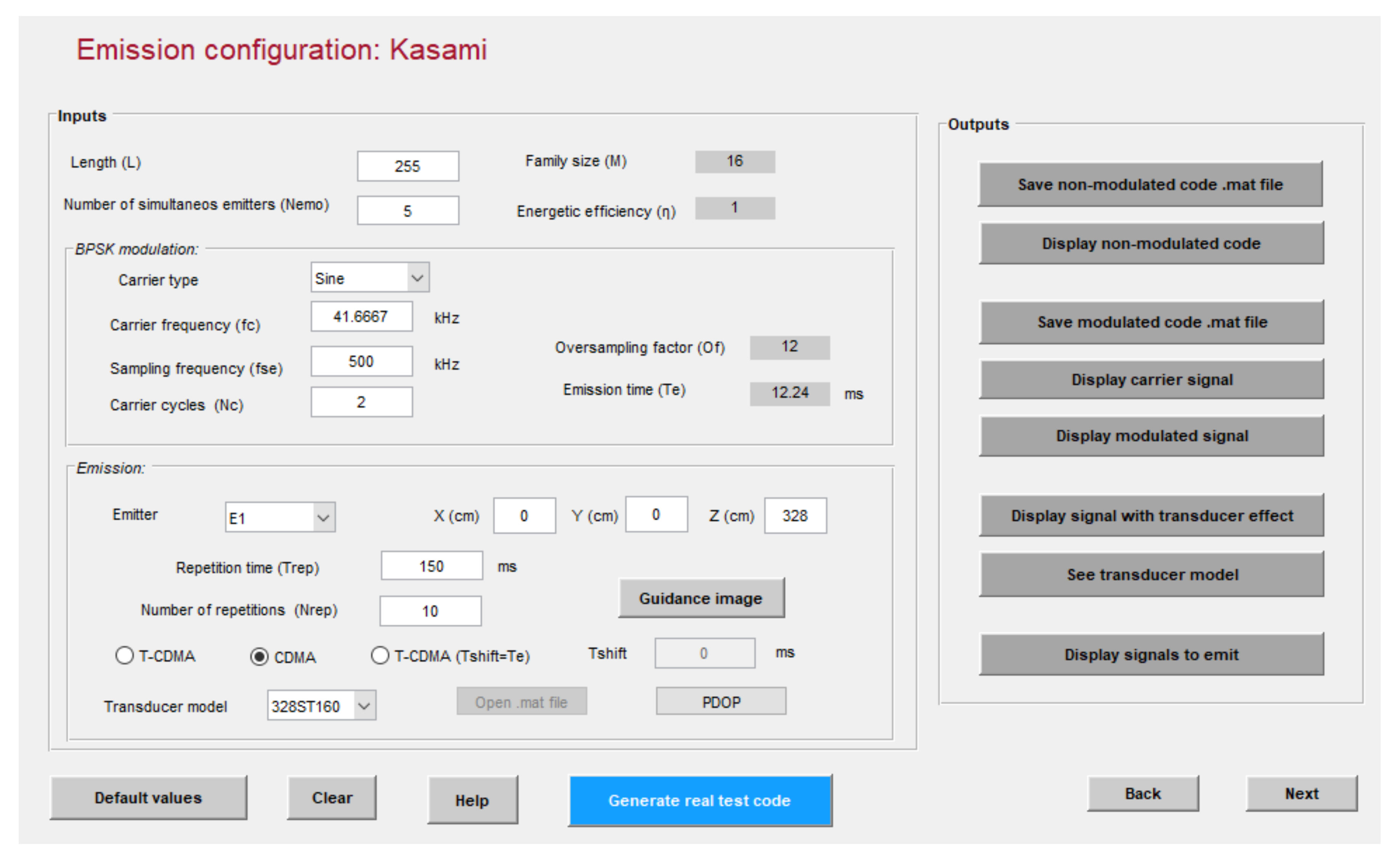
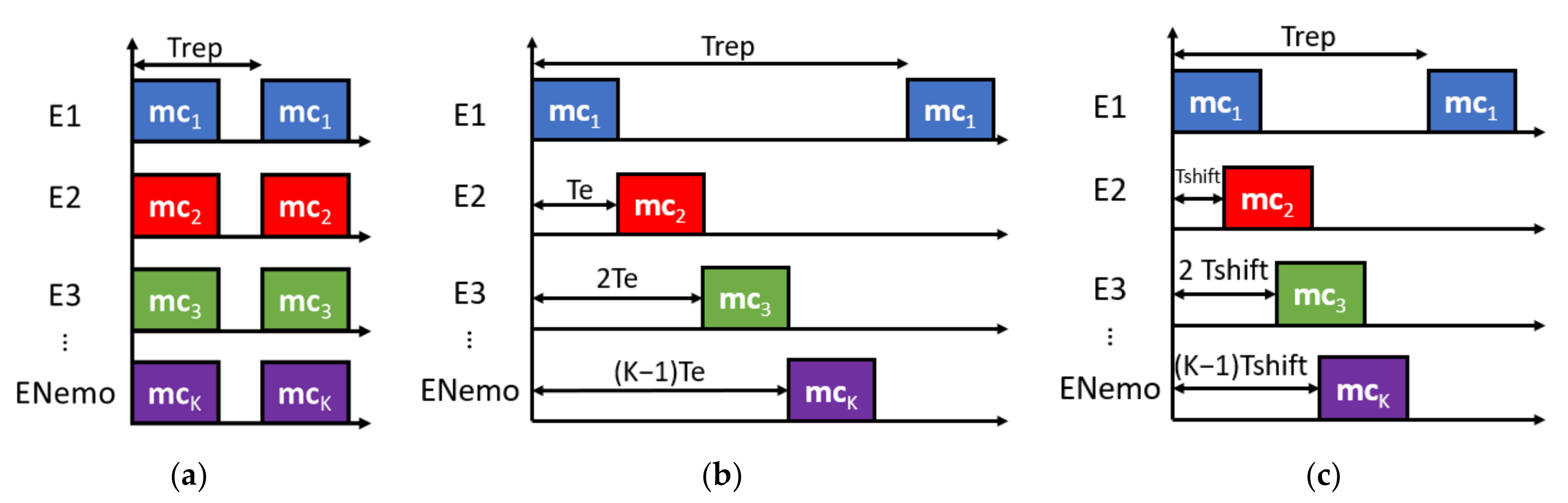
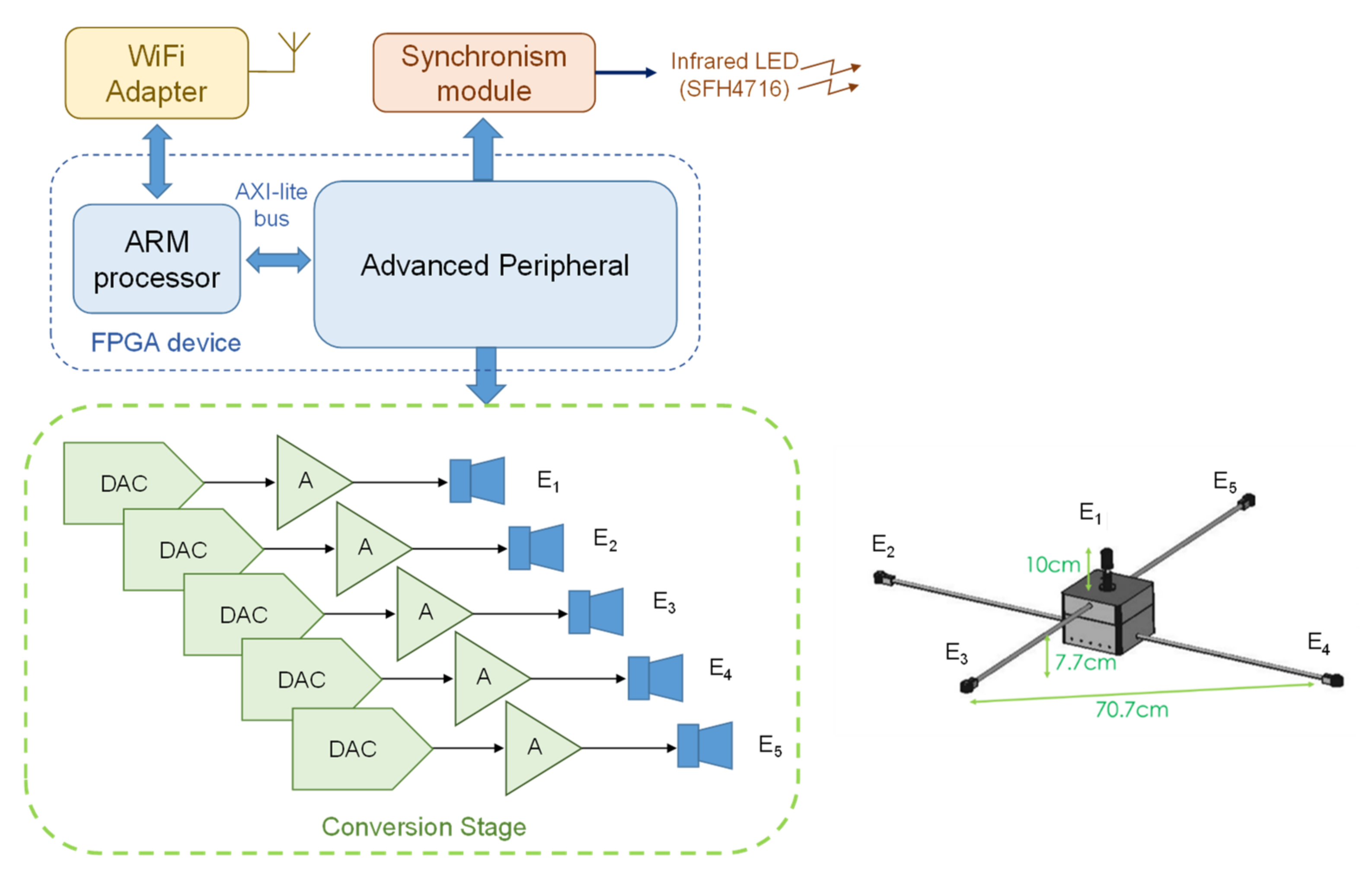
4.1. Emission Configuration
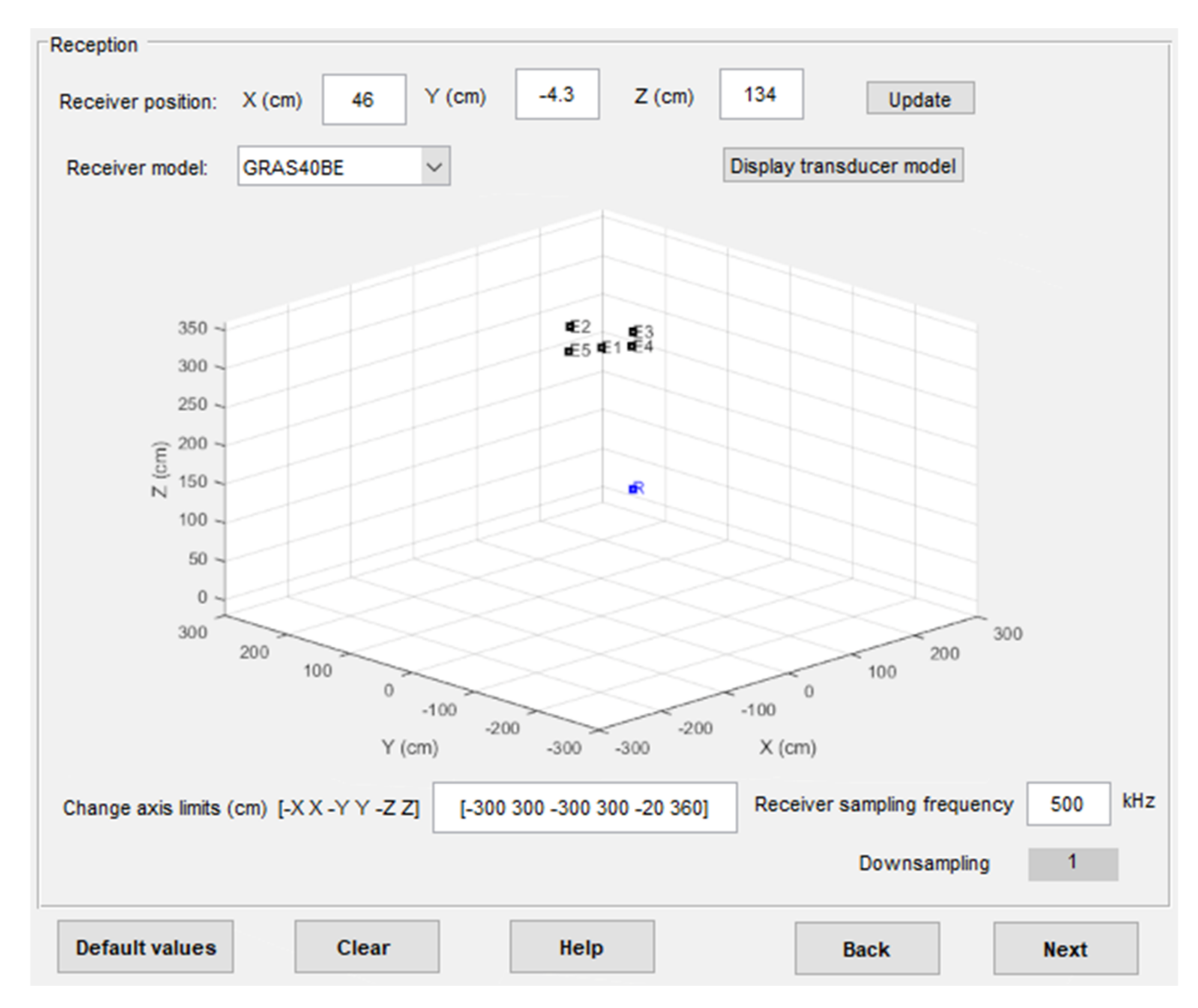
4.2. Receiver Configuration
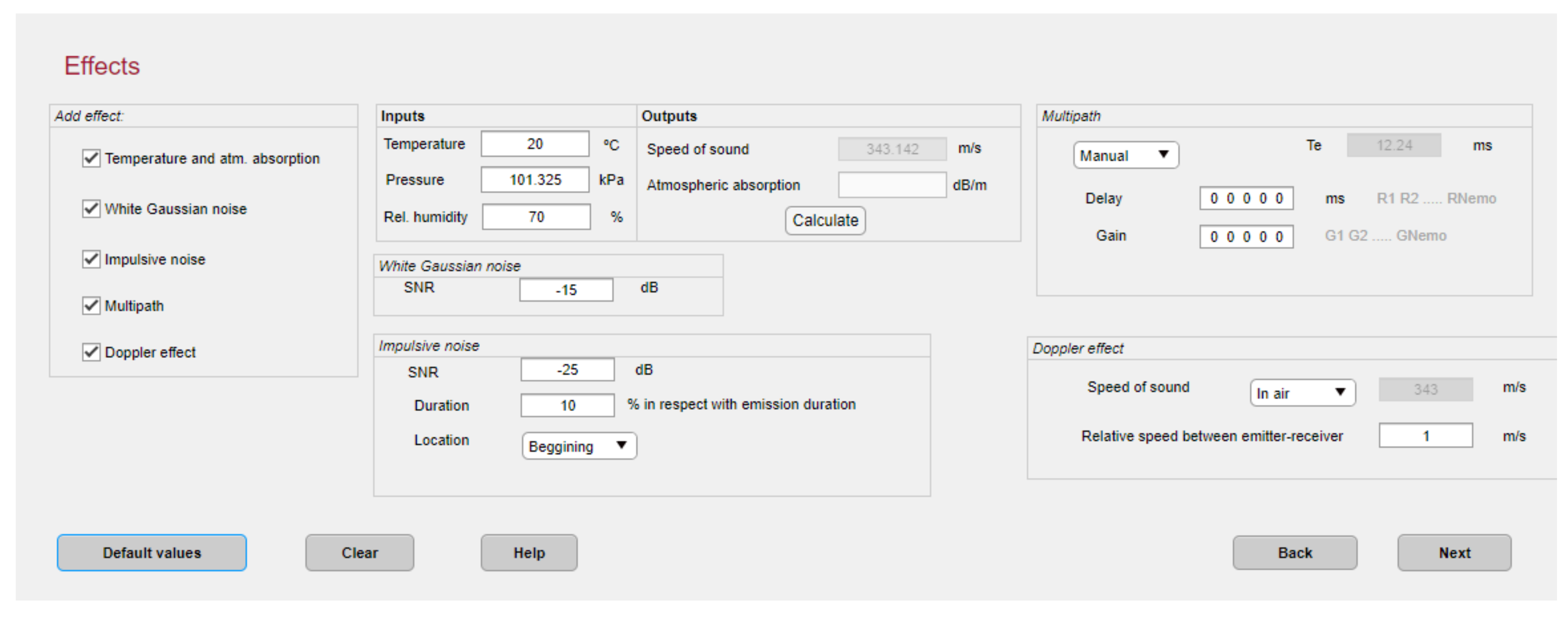
4.3. Channel Modeling
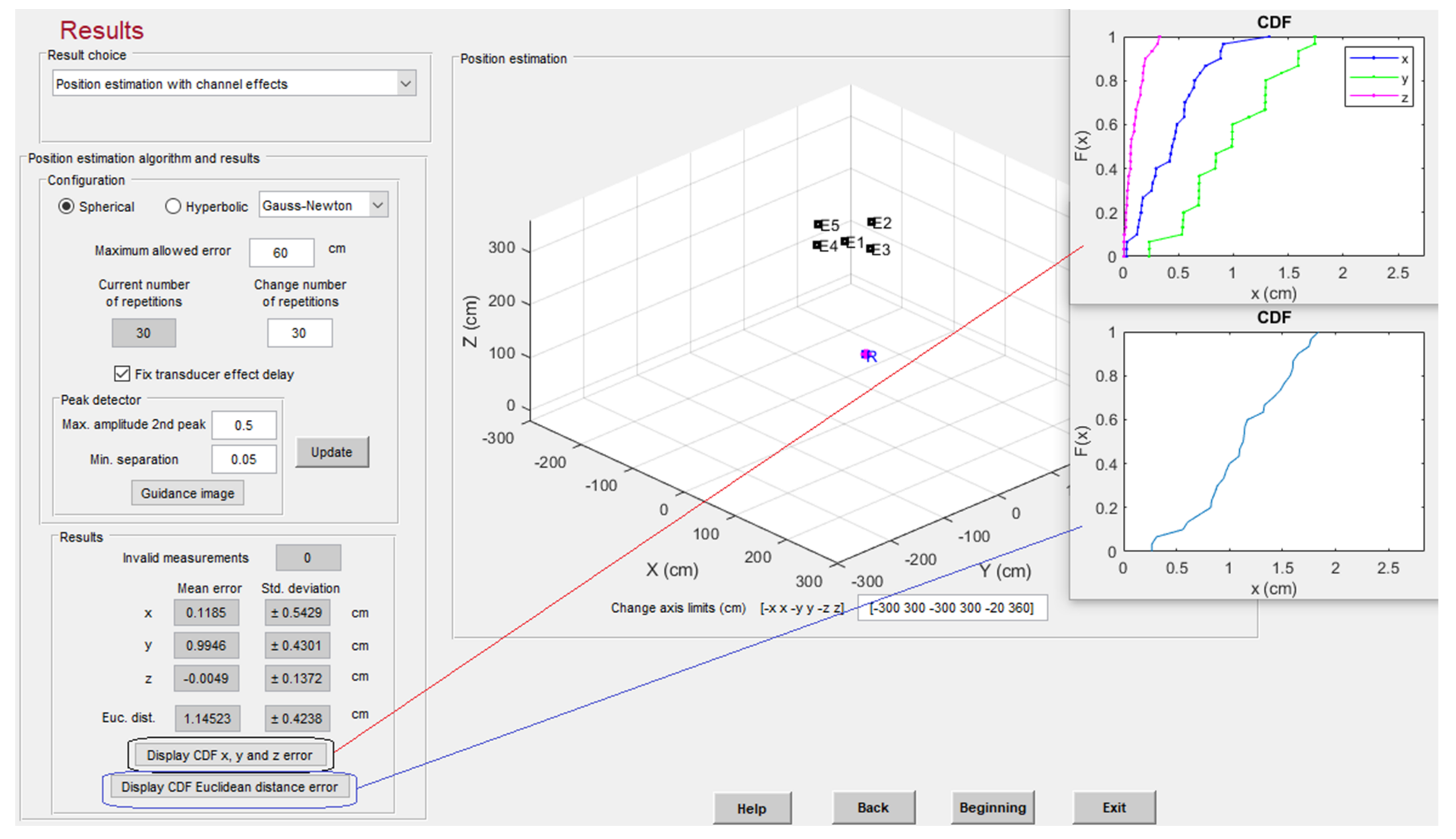
4.4. Positioning Algorithm
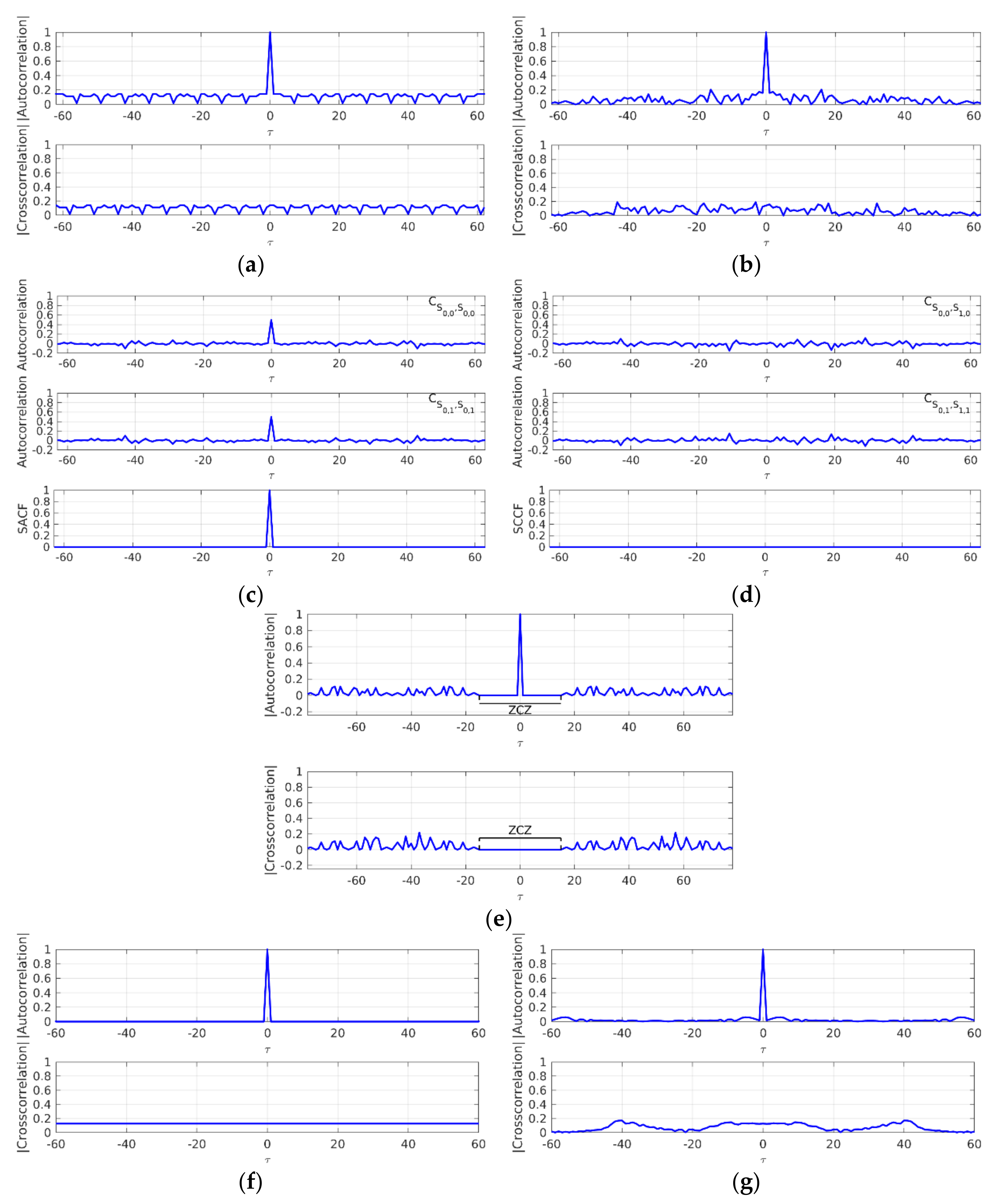
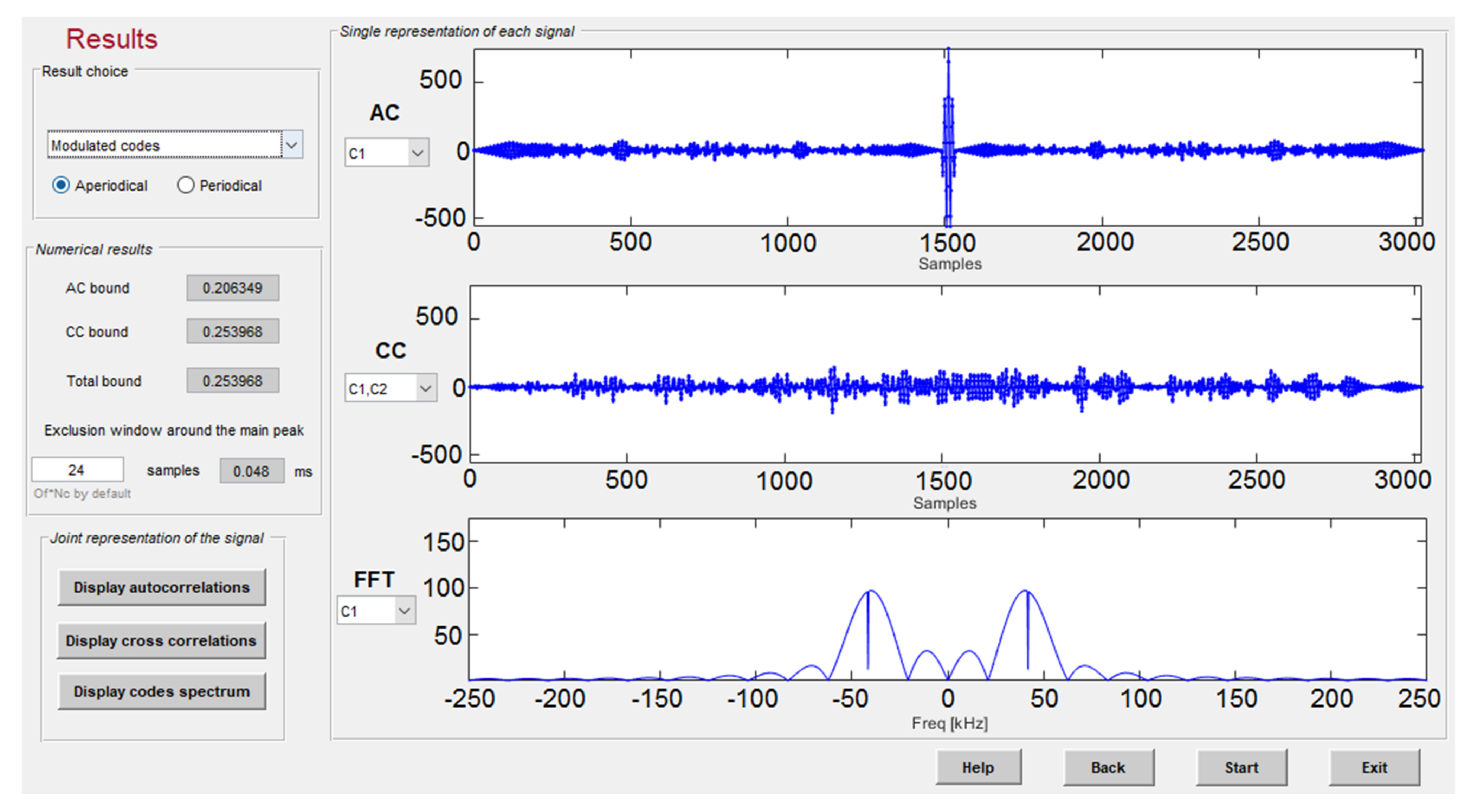
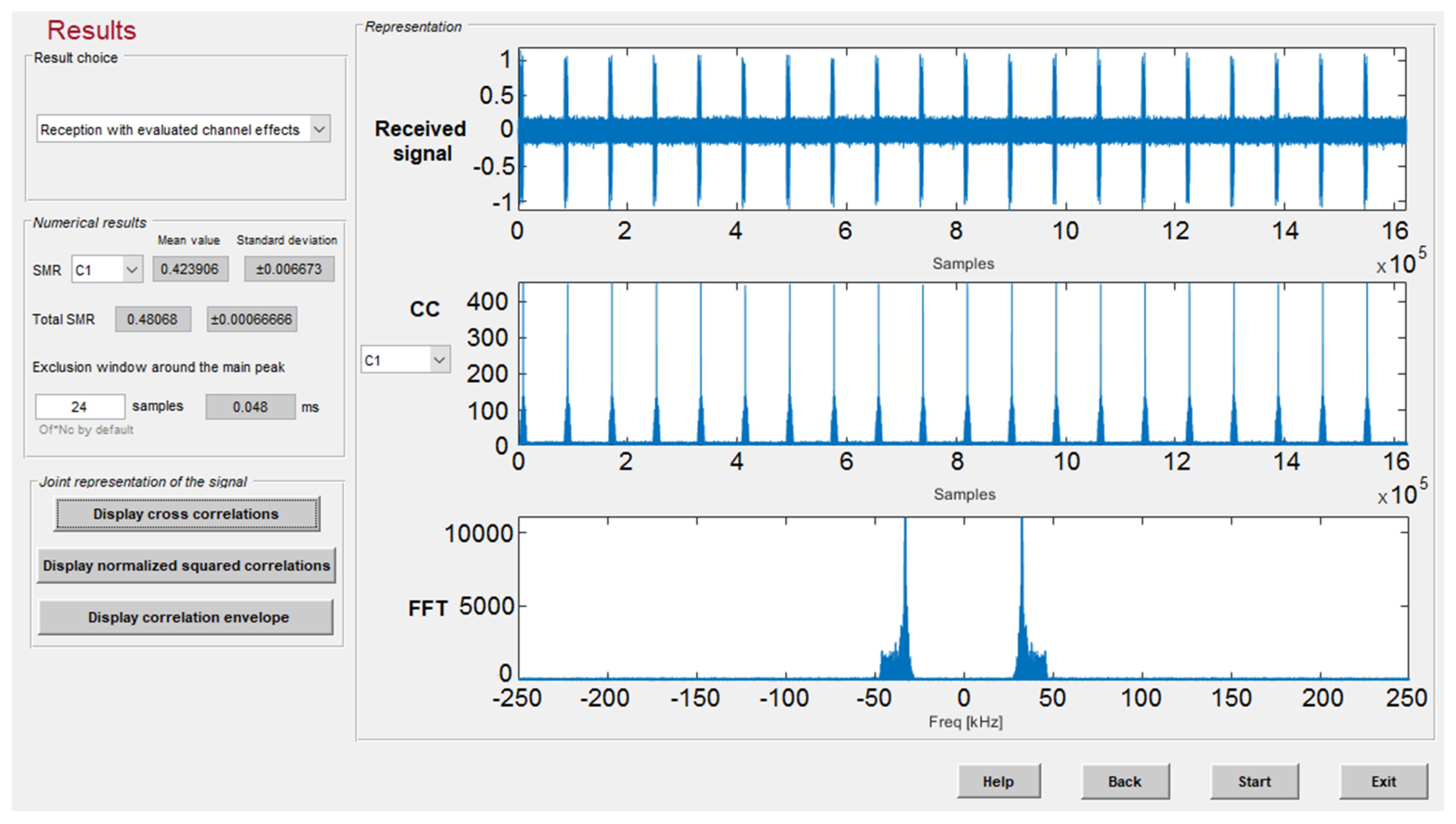
4.5. Results and Merit Factors
5. Description of the CODEUS Online Demonstrator
6. Study Case of the Online Demonstrator
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Spachos, P.; Plataniotis, K.N. BLE Beacons for Indoor Positioning at an Interactive IoT-Based Smart Museum. IEEE Syst. J. 2020, 14, 3483–3493. [Google Scholar] [CrossRef] [Green Version]
- Fleck, M.; Frid, M.; Kindberg, T.; O’Brien-Strain, E.; Rajani, R.; Spasojevic, M. From informing to remembering: Ubiquitous systems in interactive museums. IEEE Pervasive Comput. 2002, 1, 13–21. [Google Scholar] [CrossRef] [Green Version]
- Joshi, R.; Hiwale, A.; Birajdar, S.; Gound, R. Indoor Navigation with Augmented Reality. In ICCCE 2019, Oxford, UK, 8–10 November 2019; Lecture Notes in Electrical Engineering; Springer: Singapore, 2019; pp. 159–165. [Google Scholar] [CrossRef]
- Renaudin, V.; Ortiz, M.; Perul, J.; Torres-Sospedra, J.; Jimenez, A.R.; Perez-Navarro, A.; Mendoza-Silva, G.M.; Seco, F.; Landau, Y.; Marbel, R.; et al. Evaluating Indoor Positioning Systems in a Shopping Mall: The Lessons Learned from the IPIN 2018 Competition. IEEE Access 2019, 7, 148594–148628. [Google Scholar] [CrossRef]
- Montoliu, R.; Sansano, E.; Gascó, A.; Belmonte, O.; Caballer, A. Indoor Positioning for Monitoring Older Adults at Home: Wi-Fi and BLE Technologies in Real Scenarios. Electronics 2020, 9, 728. [Google Scholar] [CrossRef]
- Molina, B.; Olivares, E.; Palau, C.E.; Esteve, M. A Multimodal Fingerprint-Based Indoor Positioning System for Airports. IEEE Access 2018, 6, 10092–10106. [Google Scholar] [CrossRef]
- Fischer, C.; Gellersen, H. Location and Navigation Support for Emergency Responders: A Survey. IEEE Pervasive Comput. 2009, 9, 38–47. [Google Scholar] [CrossRef] [Green Version]
- Poulose, A.; Eyobu, O.S.; Han, D.S. An Indoor Position-Estimation Algorithm Using Smartphone IMU Sensor Data. IEEE Access 2019, 7, 11165–11177. [Google Scholar] [CrossRef]
- Mautz, R.; Tilch, S. Survey of optical indoor positioning systems. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Li, B.; Gallagher, T.; Dempster, A.G.; Rizos, C. How feasible is the use of magnetic field alone for indoor positioning? In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; IEEE: New York, NY, USA, 2012; pp. 1–9. [Google Scholar]
- Ozdemir, B.N.; Ceylan, A. Constructing a precise radio map and application of indoor positioning with dual-frequency Wi-Fi fingerprinting method. Measurement 2020, 163, 107997. [Google Scholar] [CrossRef]
- Sanchez, A.; de Castro, A.; Elvira, S.; de Rivera, G.G.; Garrido, J. Autonomous indoor ultrasonic positioning system based on a low-cost conditioning circuit. Measurement 2012, 45, 276–283. [Google Scholar] [CrossRef] [Green Version]
- Pascale, F.; Adinolfi, E.; Avagliano, M.; Giannella, V.; Salas, A. A Low Energy IoT Application Using Beacon for Indoor Localization. Appl. Sci. 2021, 11, 4902. [Google Scholar] [CrossRef]
- Kwon, S.-G.; Kwon, O.-J.; Kwon, K.-R.; Lee, S.-H. UWB and MEMS IMU Integrated Positioning Algorithm for a Work-Tool Tracking System. Appl. Sci. 2021, 11, 8826. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Brena, R.F.; García-Vázquez, J.P.; Galván-Tejada, C.E.; Muñoz-Rodriguez, D.; Vargas-Rosales, C.; Fangmeyer, J. Evolution of Indoor Positioning Technologies: A Survey. J. Sens. 2017, 2017, 2630413. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J. A Meta-Review of Indoor Positioning Systems. Sensors 2019, 19, 4507. [Google Scholar] [CrossRef] [Green Version]
- Xing, B.; Zhu, Q.; Pan, F.; Feng, X. Marker-Based Multi-Sensor Fusion Indoor Localization System for Micro Air Vehicles. Sensors 2018, 18, 1706. [Google Scholar] [CrossRef] [Green Version]
- Bahillo, A.; Aguilera, T.; Álvarez, F.J.; Perallos, A. WAY: Seamless Positioning Using a Smart Device. Wirel. Pers. Commun. 2016, 94, 2949–2967. [Google Scholar] [CrossRef]
- Xia, M.; Xiu, C.; Yang, D.; Wang, L. Performance Enhancement of Pedestrian Navigation Systems Based on Low-Cost Foot-Mounted MEMS-IMU/Ultrasonic Sensor. Sensors 2019, 19, 364. [Google Scholar] [CrossRef] [Green Version]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Urena, J.; Hernandez, A.; Garcia, J.J.; Villadangos, J.M.; Perez, M.C.; Gualda, D.; Alvarez, F.J.; Aguilera, T. Acoustic Local Positioning with Encoded Emission Beacons. Proc. IEEE 2018, 106, 1042–1062. [Google Scholar] [CrossRef]
- Aparicio, J.; Aguilera, T.; Alvarez, F.J. Robust Airborne Ultrasonic Positioning of Moving Targets in Weak Signal Coverage Areas. IEEE Sens. J. 2020, 20, 13119–13130. [Google Scholar] [CrossRef]
- Gualda, D.; Pérez-Rubio, M.; Ureña, J.; Pérez-Bachiller, S.; Villadangos, J.; Hernández, Á.; García, J.; Jiménez, A. LOCATE-US: Indoor Positioning for Mobile Devices Using Encoded Ultrasonic Signals, Inertial Sensors and Graph-Matching. Sensors 2021, 21, 1950. [Google Scholar] [CrossRef] [PubMed]
- García, E.; Paredes, J.A.; Alvarez, F.J.; Pérez, M.C.; García, J.J. Spreading sequences in active sensing: A review. Signal Process. 2015, 106, 88–105. [Google Scholar] [CrossRef]
- Li, X.; Deng, Z.D.; Rauchenstein, L.T.; Carlson, T.J. Contributed Review: Source-localization algorithms and applications using time of arrival and time difference of arrival measurements. Rev. Sci. Instrum. 2016, 87, 041502. [Google Scholar] [CrossRef]
- Nazlibilek, S. Autonomous navigation of robotic units in mobile sensor network. Measurement 2012, 45, 938–949. [Google Scholar] [CrossRef]
- Pérez-Rubio, M.C.; Losada-Gutiérrez, C.; Espinosa, F.; Macias-Guarasa, J.; Tiemann, J.; Eckermann, F.; Wietfeld, C.; Katkov, M.; Huba, S.; Ureña, J.; et al. A realistic evaluation of indoor robot position tracking systems: The IPIN 2016 competition experience. Measurement 2018, 135, 151–162. [Google Scholar] [CrossRef]
- Urrea, C.; Saa, D. Design and Implementation of a Graphic Simulator for Calculating the Inverse Kinematics of a Redundant Planar Manipulator Robot. Appl. Sci. 2020, 10, 6770. [Google Scholar] [CrossRef]
- Jankowski, T.; Nikodem, M. SMILe—Simulator for Methods of Indoor Localization. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 206–212. [Google Scholar] [CrossRef]
- Amiot, N.; Laaraiedh, M.; Uguen, B. PyLayers: An open source dynamic simulator for indoor propagation and localization. In Proceedings of the 2013 IEEE International Conference on Communications Workshops (ICC), Budapest, Hungary, 9–13 June 2013; pp. 84–88. [Google Scholar] [CrossRef] [Green Version]
- DeustoTech Mobility. Available online: https://deustotech.github.io/navindoor-documentation/ (accessed on 23 July 2020).
- Young, A.D.; Ling, M.J.; Arvind, D.K. IMUSim: A simulation environment for inertial sensing algorithm design and evaluation. In Proceedings of the 10th ACM/IEEE International Conference on Information Processing in Sensor Networks, Chicago, IL, USA, 12–14 April 2011; pp. 199–210. [Google Scholar]
- Alvarez, F.J.; Aguilera, T.; Fernandez, J.A.; Moreno, J.A.; Gordillo, A. Analysis of the performance of an Ultrasonic Local Positioning System based on the emission of Kasami codes. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Widodo, S.; Shiigi, T.; Hayashi, N.; Kikuchi, H.; Yanagida, K.; Nakatsuchi, Y.; Ogawa, Y.; Kondo, N. Moving Object Localization Using Sound-Based Positioning System with Doppler Shift Compensation. Robotics 2013, 2, 36–53. [Google Scholar] [CrossRef] [Green Version]
- Moreno, J.A.; Álvarez, F.J.; Aguilera, T.; Paredes, J.A. Easily-Deployable Acoustic Local Positioning System Based on Auto-Calibrated Wireless Beacons. Sensors 2019, 19, 1385. [Google Scholar] [CrossRef] [Green Version]
- Tseng, C.-C.; Liu, C. Complementary sets of sequences. IEEE Trans. Inf. Theory 1972, 18, 644–652. [Google Scholar] [CrossRef]
- Rubio, M.C.P.; Serrano, R.S.; Urena, J.; Alonso, H.; De Marziani, C.; Franco, F.J. Correlator Implementation for Orthogonal CSS Used in an Ultrasonic LPS. IEEE Sens. J. 2012, 12, 2807–2816. [Google Scholar] [CrossRef]
- Stanczak, S.; Boche, H.; Haardt, M. Are LAS-codes a miracle? In Proceedings of the IEEE Global Telecommunications Conference, San Antonio, TX, USA, 25–29 November 2001. [CrossRef]
- Isla, J.A.; Cegla, F.B. Simultaneous transmission and reception on all elements of an array: Binary code excitation. Proc. R. Soc. A Math. Phys. Eng. Sci. 2019, 475, 20180831. [Google Scholar] [CrossRef] [Green Version]
- Paredes, J.A.; Aguilera, T.; Álvarez, F.J.; Lozano, J.; Morera, J. Analysis of Doppler Effect on the Pulse Compression of Different Codes Emitted by an Ultrasonic LPS. Sensors 2011, 11, 10765–10784. [Google Scholar] [CrossRef]
- Khyam, M.O.; Rahim, N.A.; Li, X.; Ritz, C.; Guan, Y.L.; Ge, S.S. Design of Chirp Waveforms for Multiple-Access Ultrasonic Indoor Positioning. IEEE Sens. J. 2018, 18, 6375–6390. [Google Scholar] [CrossRef]
- Chu, D. Polyphase codes with good periodic correlation properties (Corresp.). IEEE Trans. Inf. Theory 1972, 18, 531–532. [Google Scholar] [CrossRef]
- Murano, S.; Perez-Rubio, C.; Gualda, D.; Alvarez, F.J.; Aguilera, T.; De Marziani, C. Evaluation of Zadoff–Chu, Kasami, and Chirp-Based Encoding Schemes for Acoustic Local Positioning Systems. IEEE Trans. Instrum. Meas. 2019, 69, 5356–5368. [Google Scholar] [CrossRef]
- Gonzalez, J.R.; Bleakley, C.J. High-Precision Robust Broadband Ultrasonic Location and Orientation Estimation. IEEE J. Sel. Top. Signal Process. 2009, 3, 832–844. [Google Scholar] [CrossRef]
- Qi, J.; Liu, G.-P. A Robust High-Accuracy Ultrasound Indoor Positioning System Based on a Wireless Sensor Network. Sensors 2017, 17, 2554. [Google Scholar] [CrossRef] [Green Version]
- Richard, B.; Rastiello, G.; Giry, C.; Riccardi, F.; Paredes, R.; Zafati, E.; Kakarla, S.; Lejouad, C. CastLab: An object-oriented finite element toolbox within the Matlab environment for educational and research purposes in computational solid mechanics. Adv. Eng. Softw. 2018, 128, 136–151. [Google Scholar] [CrossRef]
- Din, M.M.U.; Kim, B. Development of Multi-DOF Model of Automotive LED Headlamp Assembly for Force Transmission Prediction Using MATLAB GUI. Appl. Sci. 2020, 10, 5906. [Google Scholar] [CrossRef]
- Kasami, T. Weight Distribution Formula for Some Class of Cyclic Codes. 1966. Available online: https://www.semanticscholar.org/paper/WEIGHT-DISTRIBUTION-FORMULA-FOR-SOME-CLASS-OF-CODES-Kasami/08ff549eb15fd2db8eedf5adcd7317223bcfffd3 (accessed on 23 December 2021).
- Golay, M. Complementary series. IEEE Trans. Inf. Theory 1961, 7, 82–87. [Google Scholar] [CrossRef]
- Mow, W.H.; Li, S.-Y. Aperiodic autocorrelation properties of perfect polyphase sequences. Electron. Lett. 1990, 26, 2068–2070. [Google Scholar] [CrossRef]
- Pro-Wave Electronic Corp. 328ST160, Air Ultrasonic Ceramic Transducer. Available online: http://www.prowave.com.tw/english/products/ut/open-type/328s160.htm (accessed on 23 December 2021).
- GRAS 40BE 1/4” Prepolarized Free-Field Microphone. Available online: https://www.grasacoustics.com/products/product/158-40BE (accessed on 23 December 2021).
- SPU0414HR5H-SB MEMs Microphone, Knowles Acoustics. Available online: https://datasheet.octopart.com/SPU0414HR5H-SB-Knowles-Acoustics-datasheet-21203067.pdf (accessed on 23 December 2021).
- Kaune, R. Accuracy studies for TDOA and TOA localization. In Proceedings of 2012 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 408–415. [Google Scholar]
- Allen, J.B.; Berkley, D.A. Image method for efficiently simulating small-room acoustics. J. Acoust. Soc. Am. 1979, 65, 943–950. [Google Scholar] [CrossRef]
- Dickinson, M.; Hower, G.; Rigas, H.; Rockway, J. Ray Tracing for Atmospheric Acoustic Waves Using a Hybrid Computer. IEEE Trans. Geosci. Electron. 1972, 10, 166–172. [Google Scholar] [CrossRef]
- Cramer, O. The variation of the specific heat ratio and the speed of sound in air with temperature, pressure, humidity, and CO2 concentration. J. Acoust. Soc. Am. 1993, 93, 2510–2516. [Google Scholar] [CrossRef]
- Yan, J.; Tiberius, C.; Bellusci, G.; Janssen, G. Feasibility of Gauss-Newton method for indoor positioning. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 660–670. [Google Scholar] [CrossRef]
- Thomas, F.; Ros, L. Revisiting trilateration for robot localization. IEEE Trans. Robot. 2005, 21, 93–101. [Google Scholar] [CrossRef] [Green Version]
- M´laren, D. An Introduction to the Geometry of N Dimensions; Dover Publications: Dover, UK, 1958. [Google Scholar]
- Aguilera, T.; Alvarez, F.J.; Gualda, D.; Villadangos, J.M.; Hernandez, A.; Urena, J. Multipath Compensation Algorithm for TDMA-Based Ultrasonic Local Positioning Systems. IEEE Trans. Instrum. Meas. 2018, 67, 984–991. [Google Scholar] [CrossRef]
- Ciudad, F.; Hernández, A.; Gualda, D.; Aparicio-Esteve, E. Design and Implementation of a Remotely Configurable Ul-trasonic Local Positioning Systems. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 2 October 2019; pp. 1–8. [Google Scholar]
- Hernández, A.; García, E.; Gualda, D.; Villadangos, J.M.; Nombela, F.; Ureña, J. FPGA-Based Architecture for Managing Ultrasonic Beacons in a Local Positioning System. IEEE Trans. Instrum. Meas. 1964, 66, 1954–1964. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | %AIPS Papers at IPIN |
|---|---|
| 2016 | 10.32 |
| 2017 | 7.56 |
| 2018 | 9.01 |
| 2019 | 6.10 |
| 2021 | 7.69 |
| Coordinate | E1 | E2 | E3 | E4 | E5 | R1 | R2 | R3 | R4 |
|---|---|---|---|---|---|---|---|---|---|
| x (m) | 0.00 | 0.00 | 0.51 | 0.00 | −0.51 | 0.43 | 1.09 | −0.80 | 0.19 |
| y (m) | 0.00 | 0.512 | 0.00 | −0.52 | 0.00 | −0.04 | 1.36 | 0.95 | 1.00 |
| z (m) | 3.29 | 3.43 | 3.37 | 3.43 | 3.37 | 1.34 | 0.00 | 0.00 | 0.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez-Rubio, M.C.; Hernández, Á.; Gualda-Gómez, D.; Murano, S.; Vicente-Ranera, J.; Ciudad-Fernández, F.; Villadangos, J.M.; Nieto, R. Simulation Tool and Online Demonstrator for CDMA-Based Ultrasonic Indoor Localization Systems. Sensors 2022, 22, 1038. https://doi.org/10.3390/s22031038
Pérez-Rubio MC, Hernández Á, Gualda-Gómez D, Murano S, Vicente-Ranera J, Ciudad-Fernández F, Villadangos JM, Nieto R. Simulation Tool and Online Demonstrator for CDMA-Based Ultrasonic Indoor Localization Systems. Sensors. 2022; 22(3):1038. https://doi.org/10.3390/s22031038
Chicago/Turabian StylePérez-Rubio, María Carmen, Álvaro Hernández, David Gualda-Gómez, Santiago Murano, Jorge Vicente-Ranera, Francisco Ciudad-Fernández, José Manuel Villadangos, and Rubén Nieto. 2022. "Simulation Tool and Online Demonstrator for CDMA-Based Ultrasonic Indoor Localization Systems" Sensors 22, no. 3: 1038. https://doi.org/10.3390/s22031038
APA StylePérez-Rubio, M. C., Hernández, Á., Gualda-Gómez, D., Murano, S., Vicente-Ranera, J., Ciudad-Fernández, F., Villadangos, J. M., & Nieto, R. (2022). Simulation Tool and Online Demonstrator for CDMA-Based Ultrasonic Indoor Localization Systems. Sensors, 22(3), 1038. https://doi.org/10.3390/s22031038