
Can I Trust This Location Estimate? Reproducibly Benchmarking the Methods of Dynamic Accuracy Estimation of Localization


Abstract
:1. Introduction
2. Related Work
- , the ground truth location where the fingerprint was recorded;
- , the received fingerprint for which the location must be estimated;
- , the estimated location derived from the received fingerprint ;
- , the ith closest fingerprint to ;
- , the location of the ith closest fingerprint ;
- , the distance of two fingerprints, and , in the signal space;
- , the geographical distance between two locations, and .
2.1. Rule-Based Methods
2.2. Data-Driven Methods
2.3. Baselines, Metrics, and Evaluation Methodologies
2.3.1. Baselines
2.3.2. Evaluation Metrics and Methodologies
2.3.3. Discussion of Baselines and Metrics Used in the Literature
3. Benchmarking: Materials and Methods
3.1. Datasets
3.1.1. Sigfox Outdoor Dataset
3.1.2. LoRaWAN Outdoor Dataset
3.1.3. DSI Indoor Dataset
3.1.4. MAN Indoor Dataset
3.2. Existing Methods and Baselines Used
3.2.1. Existing Methods Studied
- Method by Marcus et al. [8] (): This method proposed by Marcus et al. [8] is presented as an improving modification of [7], which it uses as its baseline. The method was presented in Section 2.1 and defined in Equation (5).
- Data-driven method (): In this approach, a second training set, distinct from the one used to train the positioning model, containing the same features (RSSI values from the same APs), is used to train a regression model. We utilize the Extra Trees method, as an indicative well-performing relevant algorithm. The data-driven approach is studied, in variations, in several works [6,9,12,16,17].
3.2.2. Baselines Used
- DAE constant mean (): The mean positioning error of a set that was unseen in training time is used as the constant estimate of error.
- DAE constant median (): Similar to , with the difference that the median error is used instead of the mean;
- DAE uniform random (): A randomly sampled value from a uniform distribution in the range between zero and the mean positioning error in a previously unseen set is assigned to characterize the DAE of each estimate;
- DAE normal random (): A randomly sampled value from a normal distribution is assigned to characterize the DAE of each estimate. The distribution is centered at the value of the mean positioning error in a previously unseen set, while it is scaled by one quarter of the standard deviation of the positioning error in that set.
4. Results
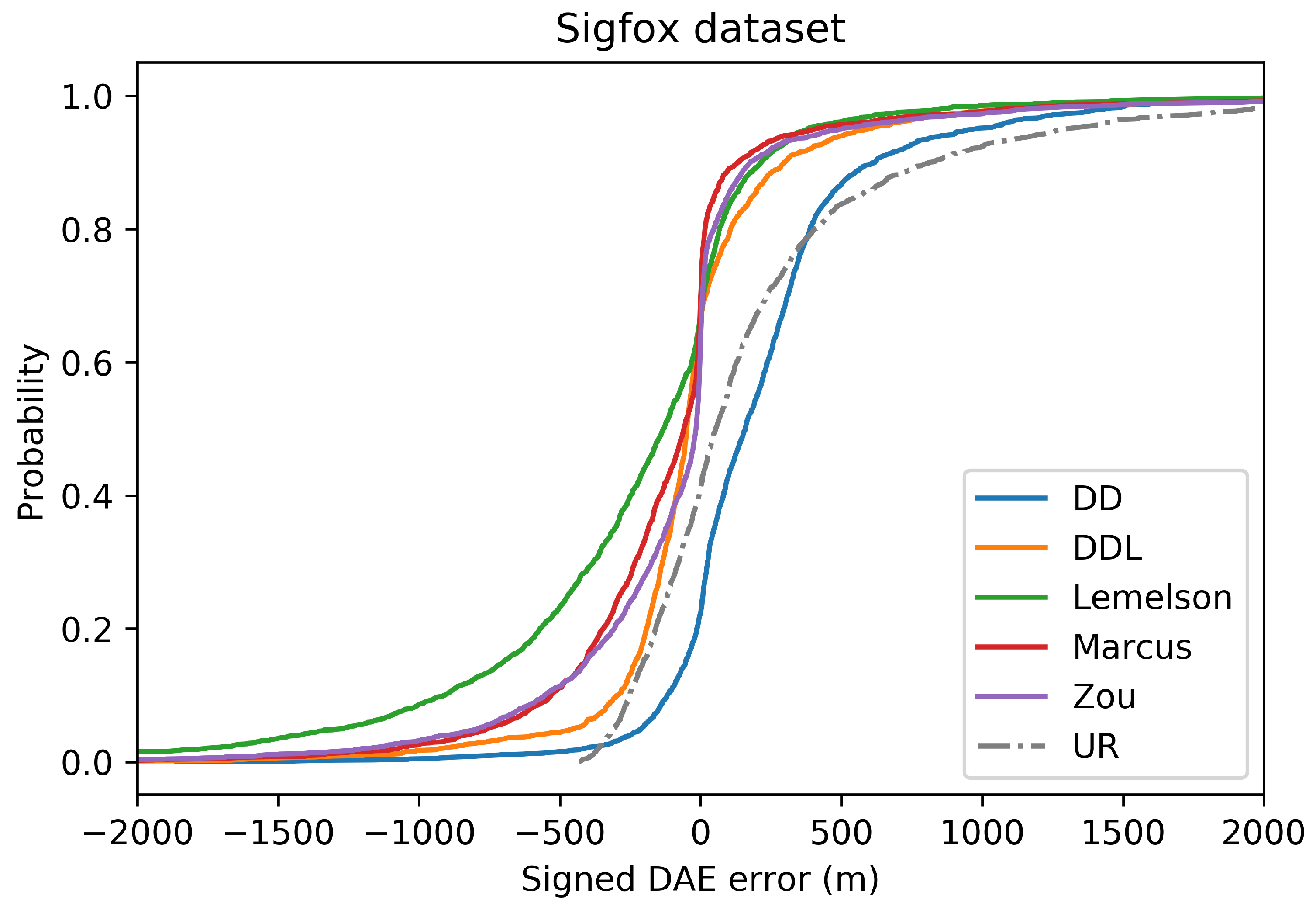
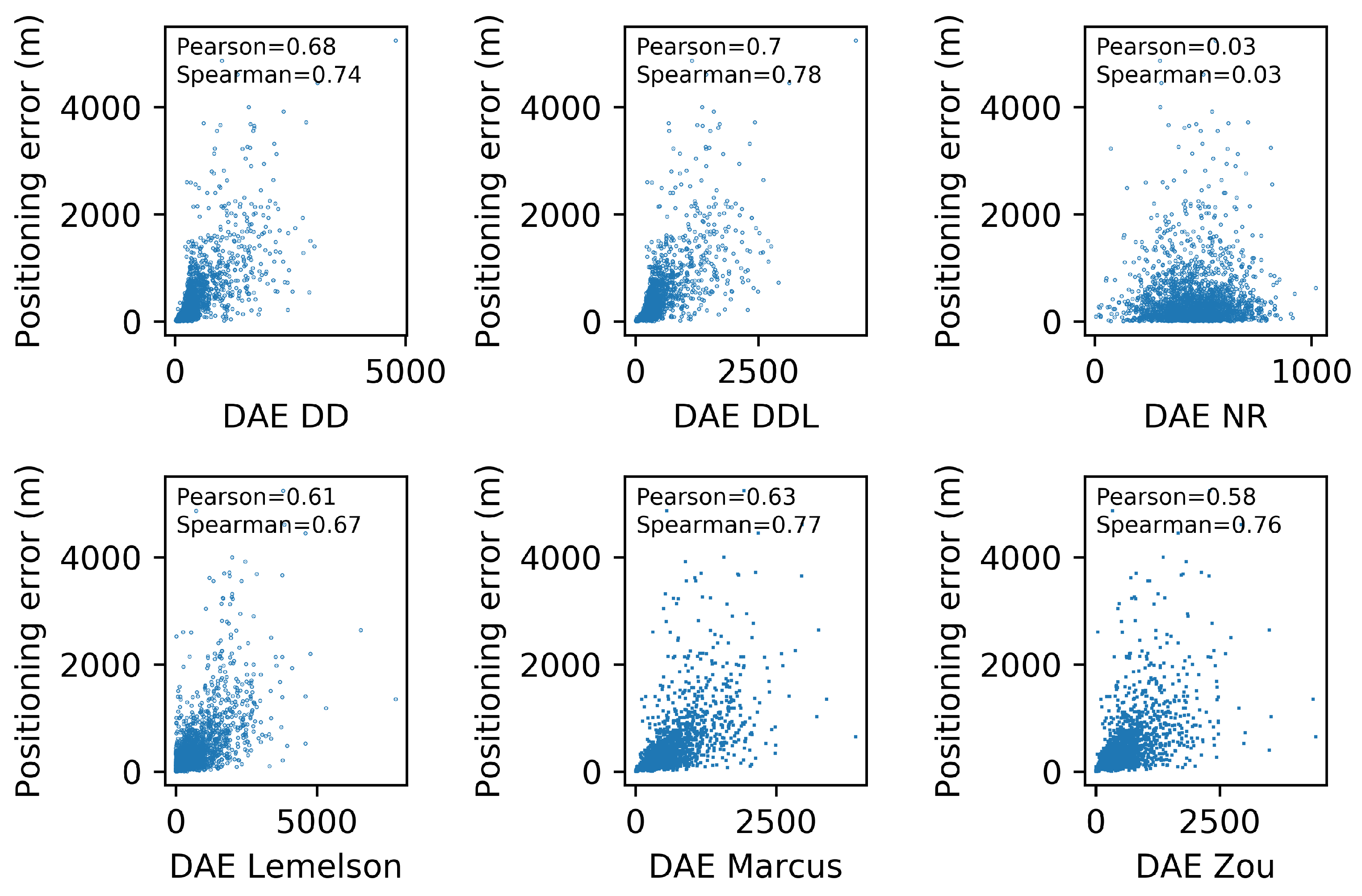
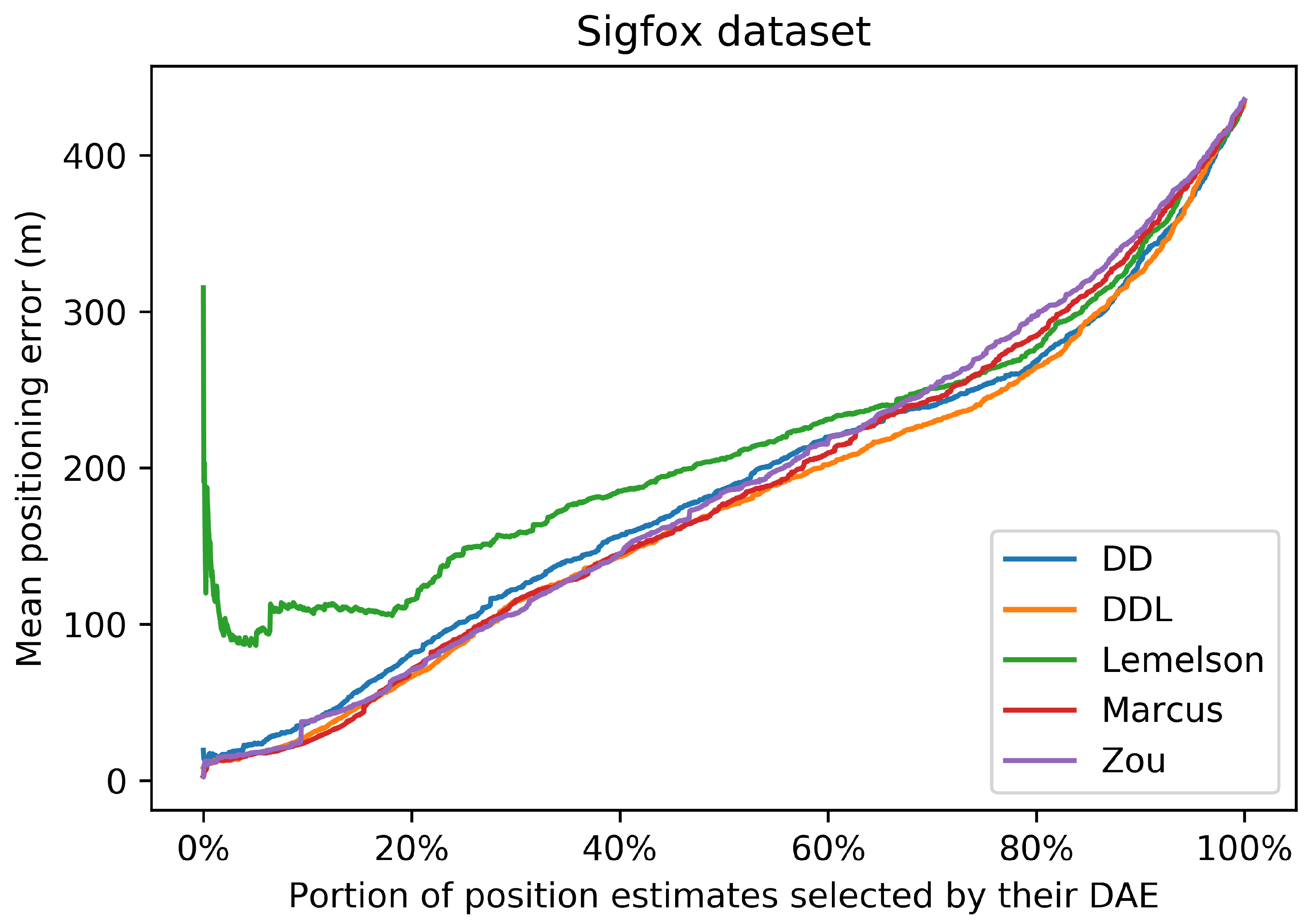
4.1. Tests on the Sigfox Dataset
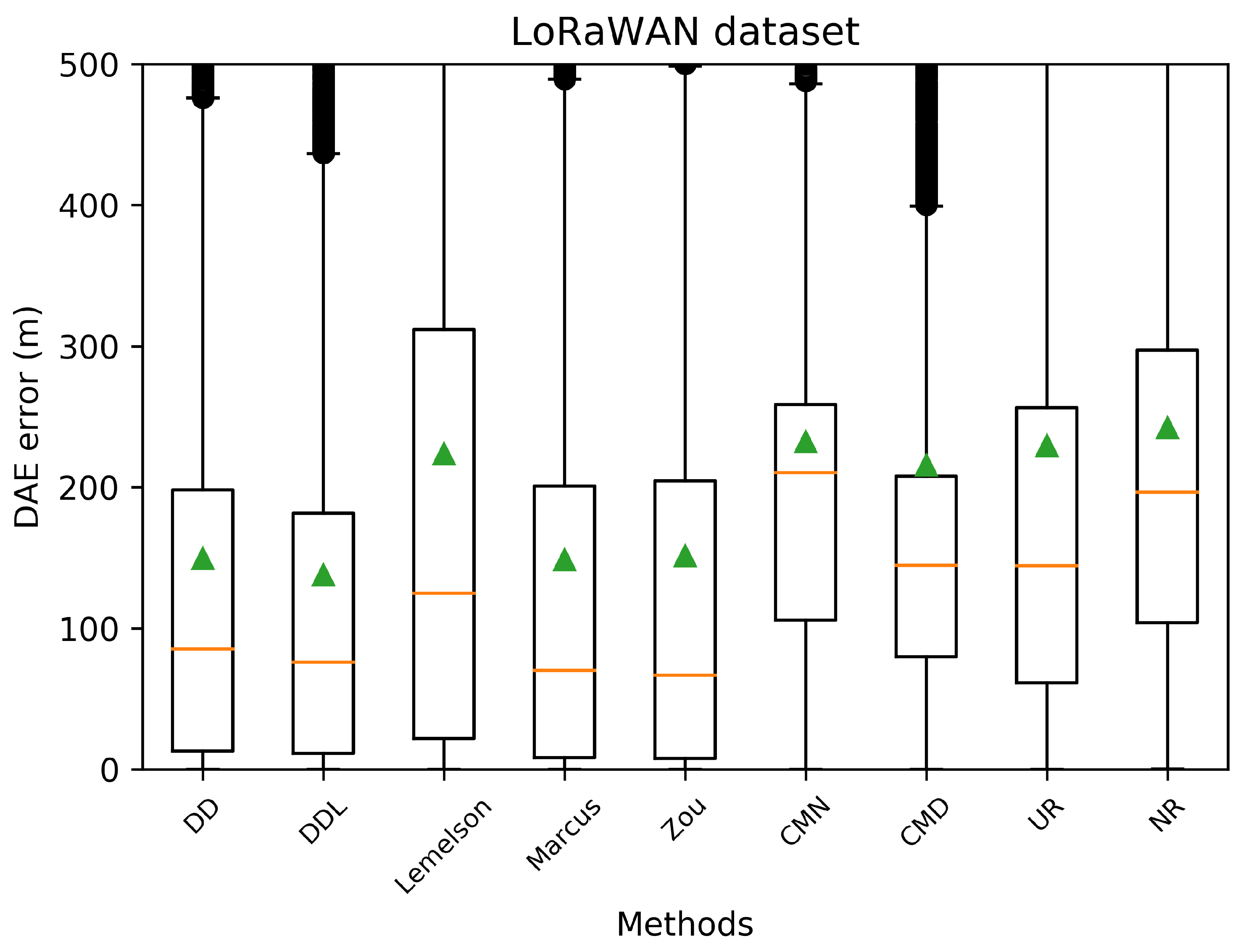
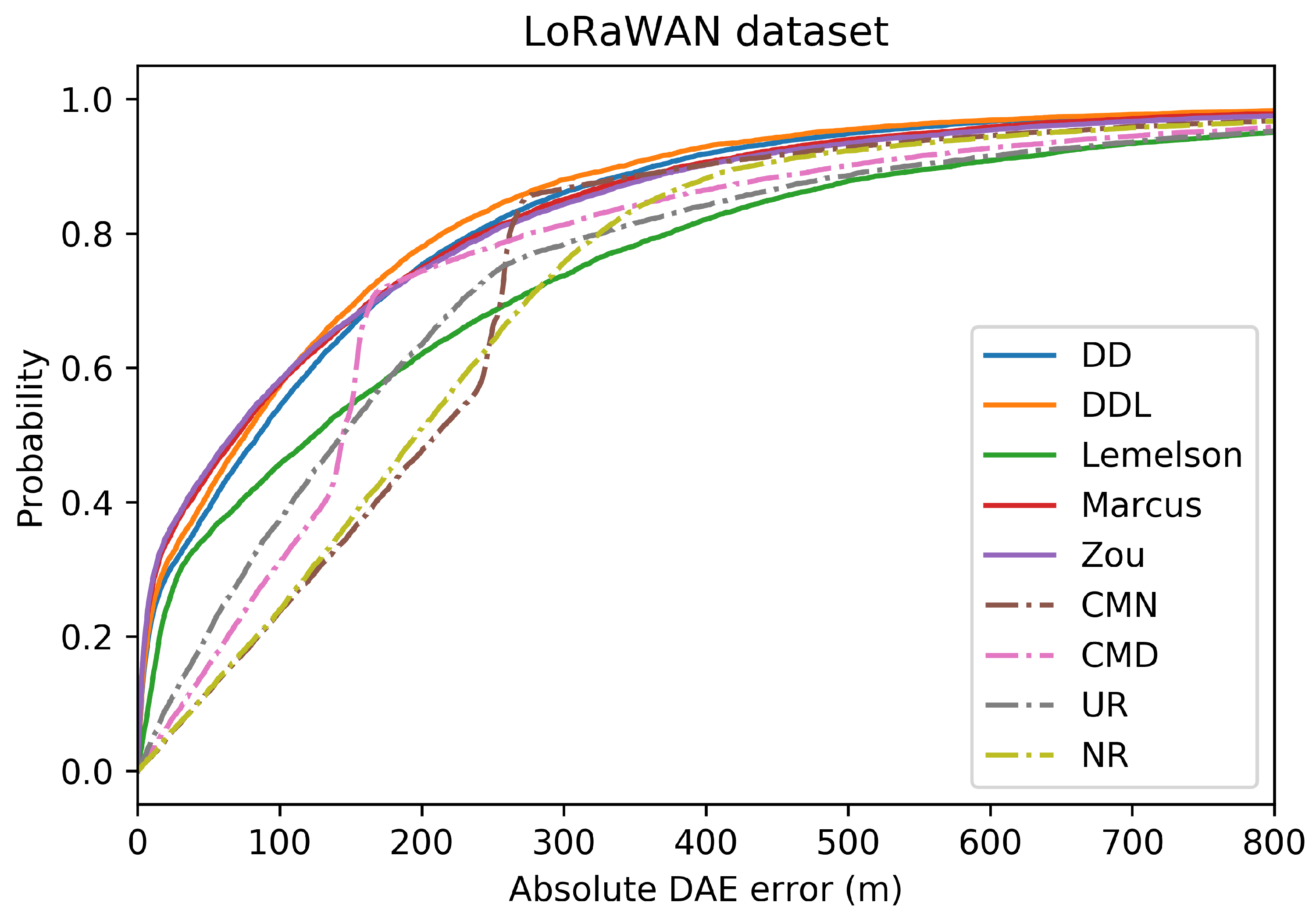
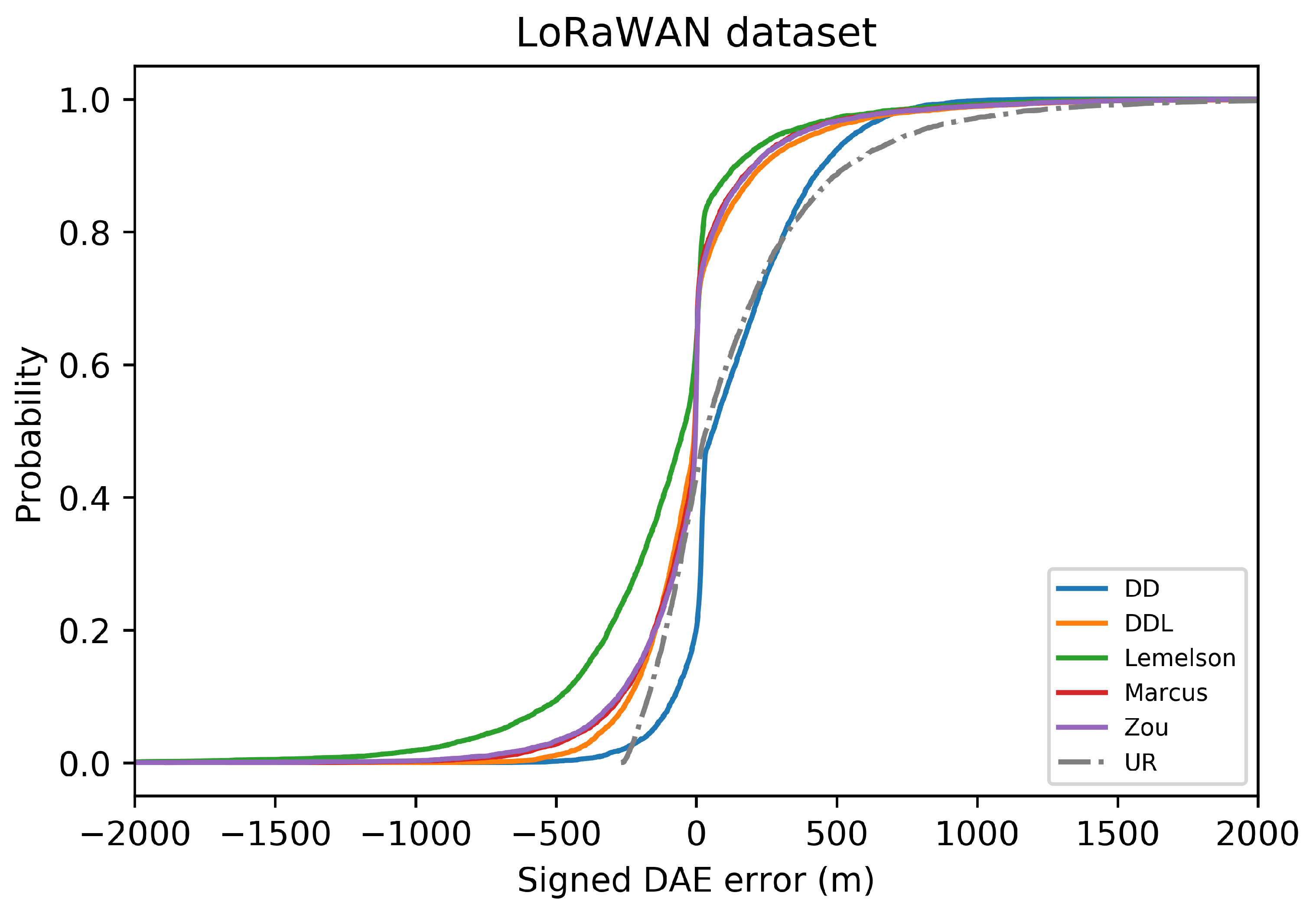
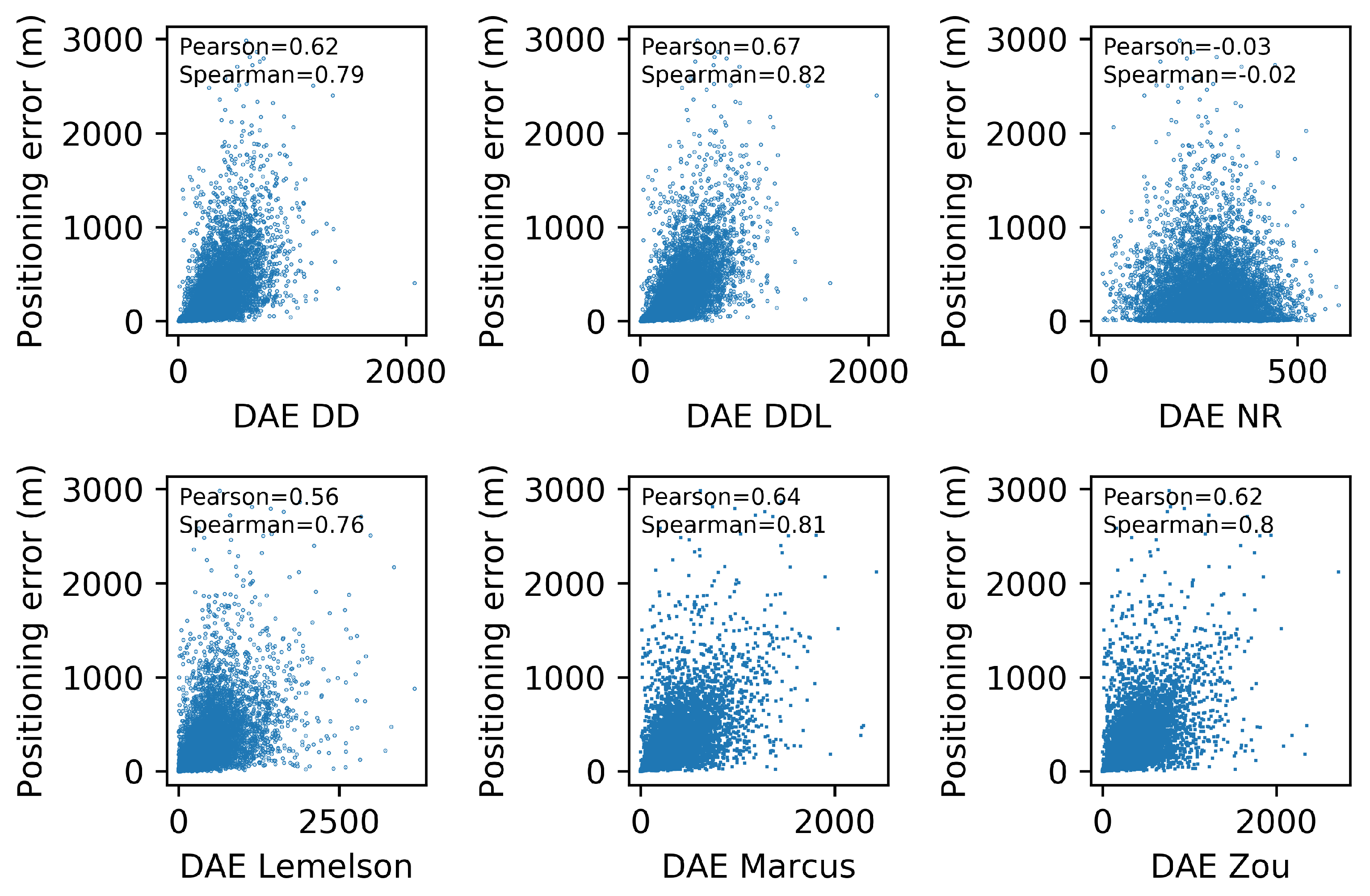
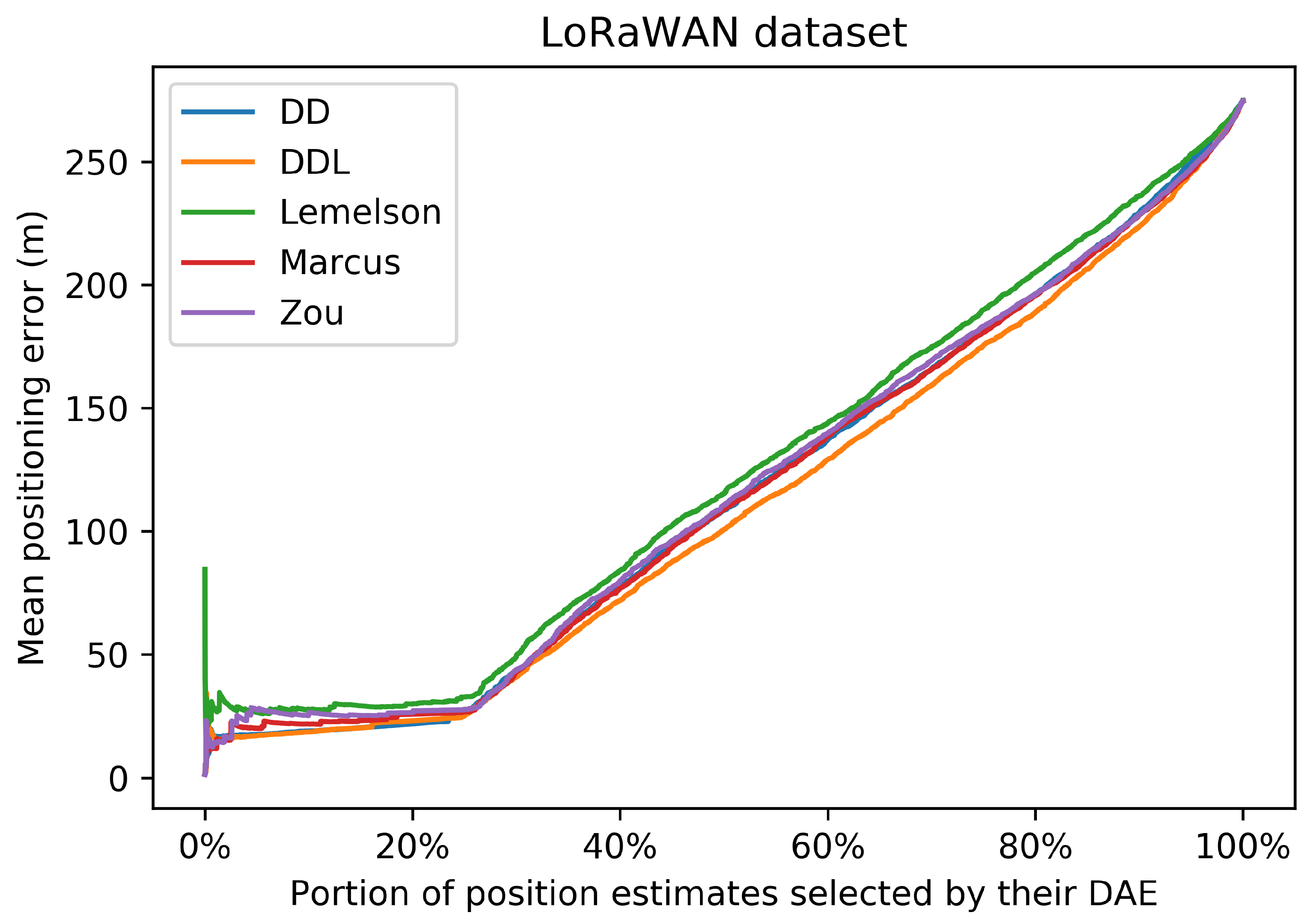
4.2. Tests on the LoRaWAN Outdoor Dataset
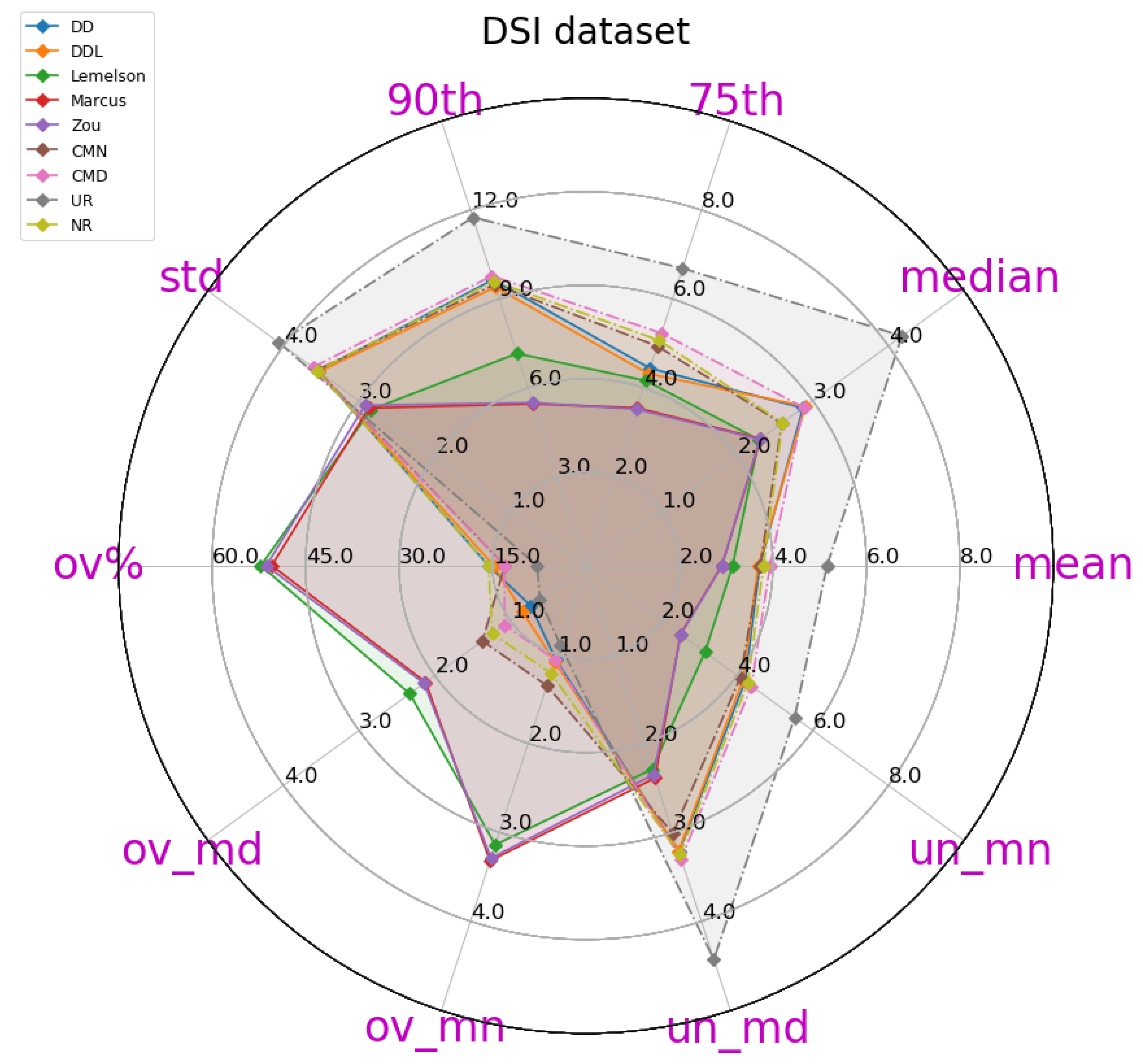
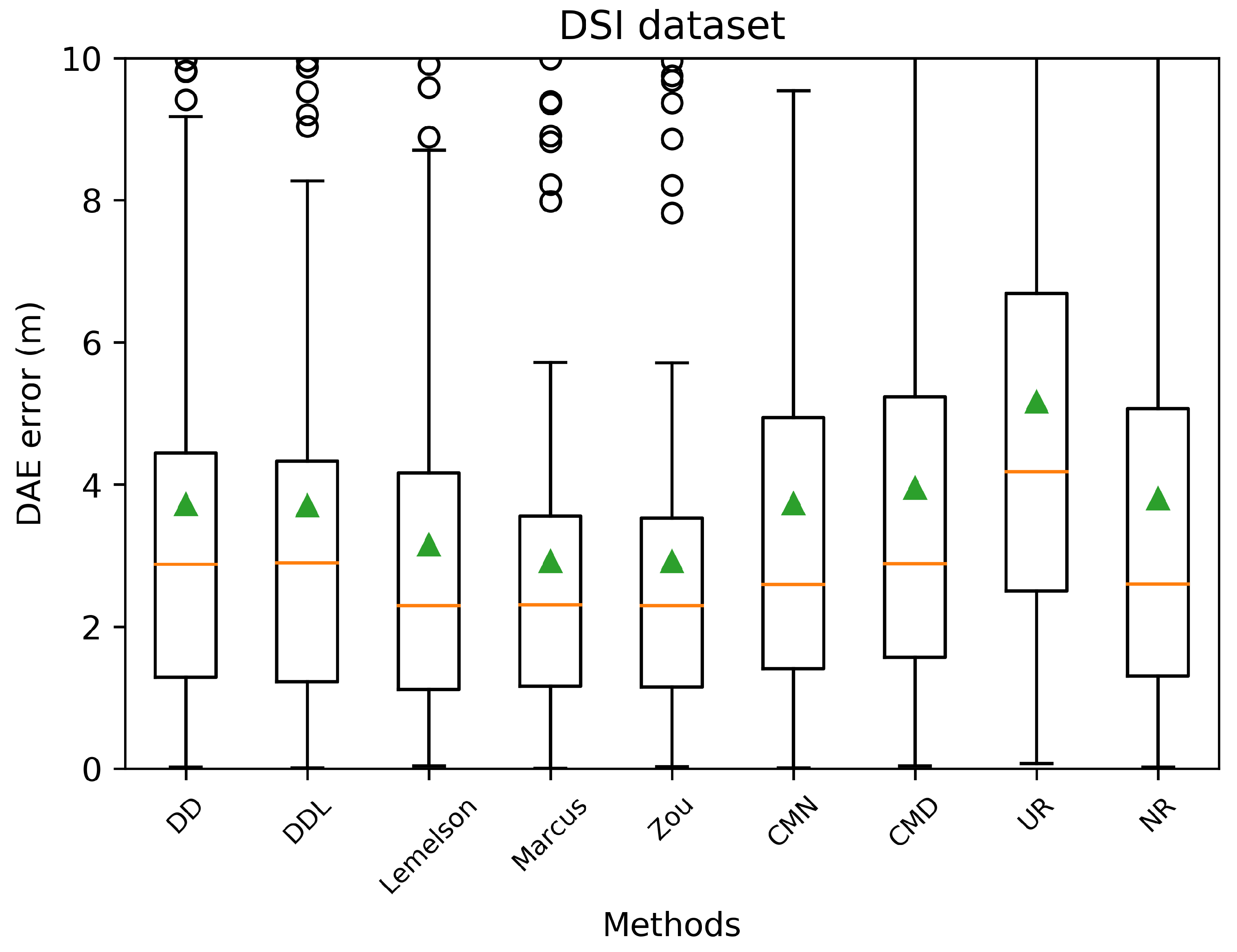
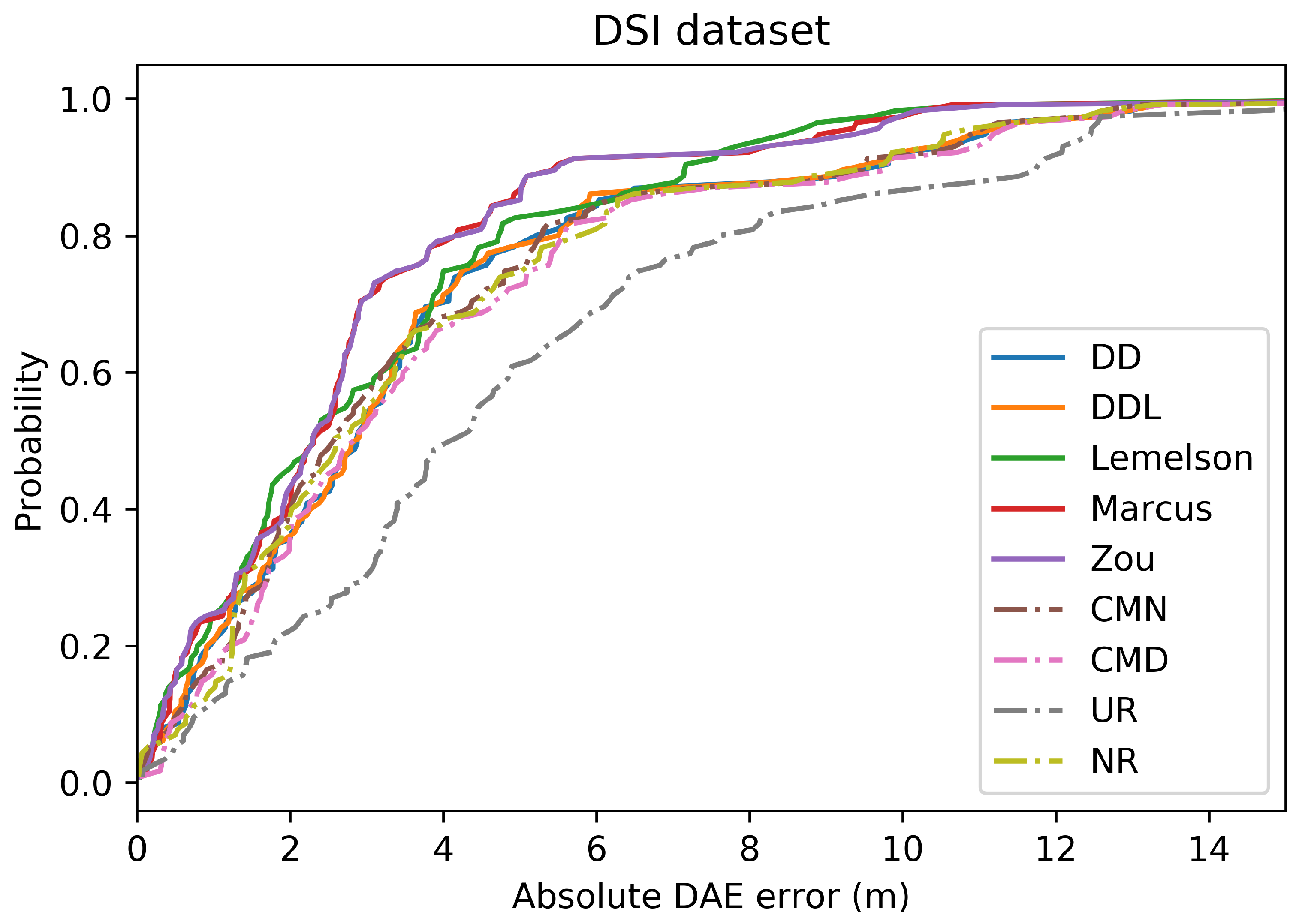
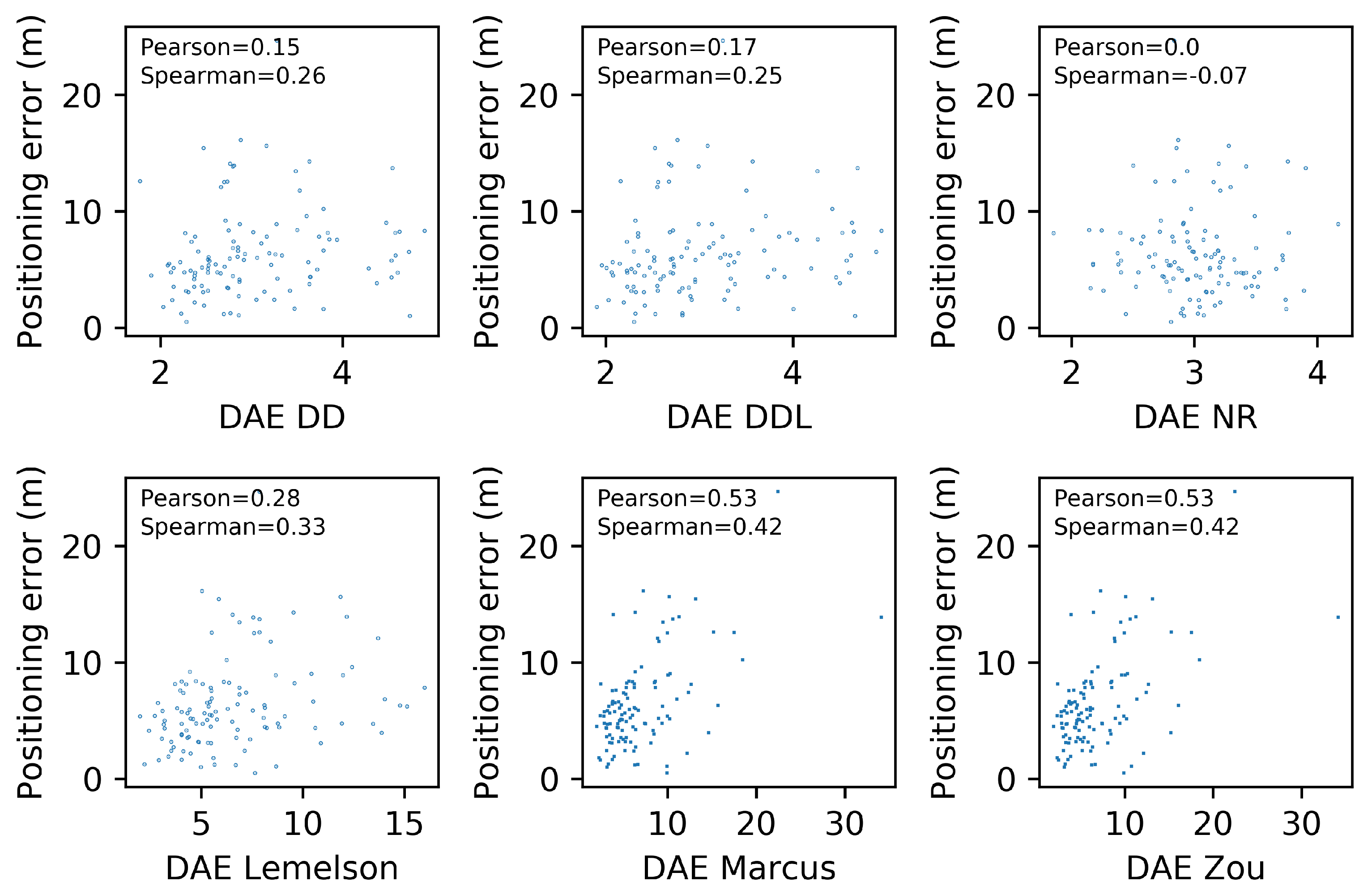
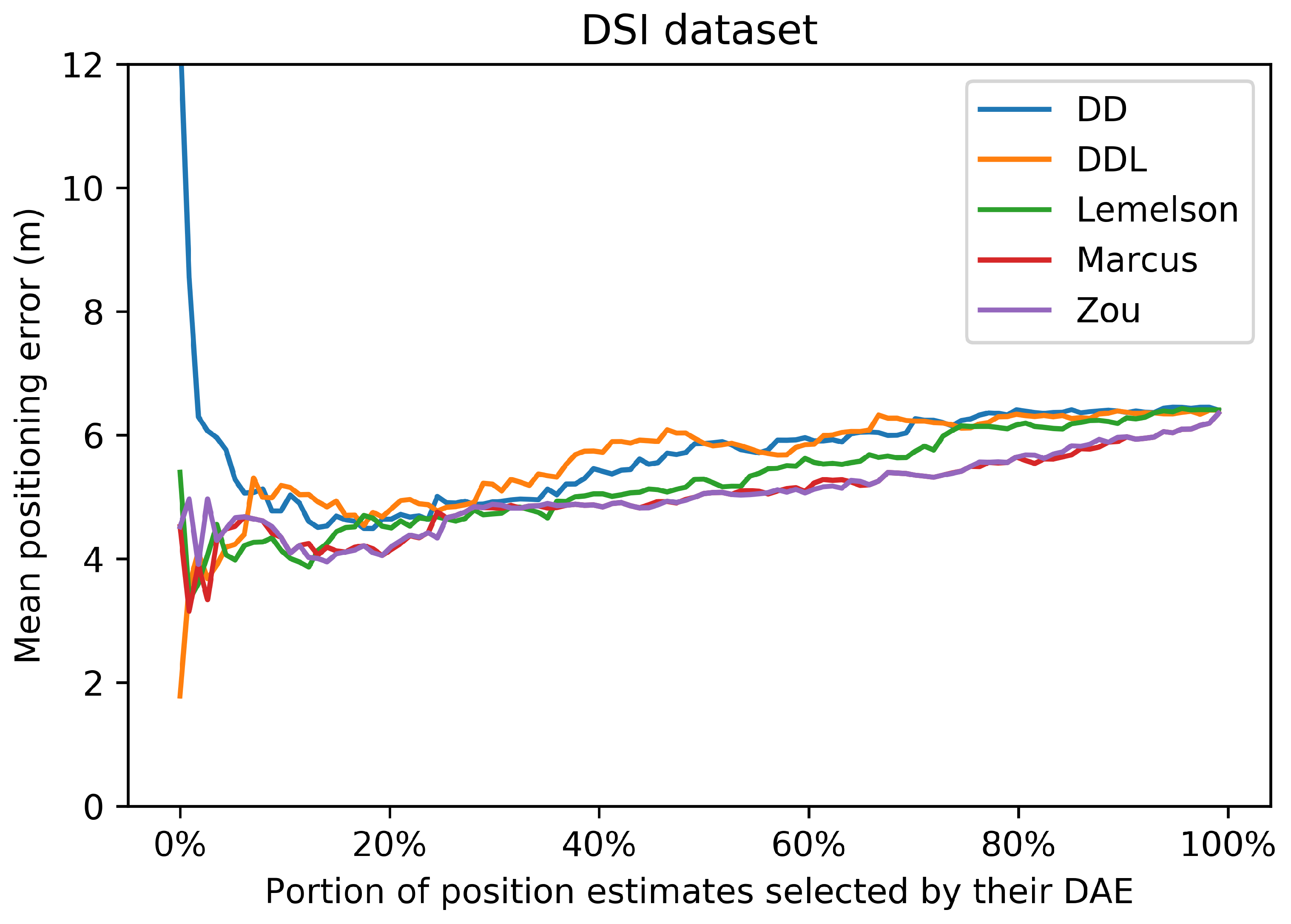
4.3. Tests on the DSI Indoor Dataset
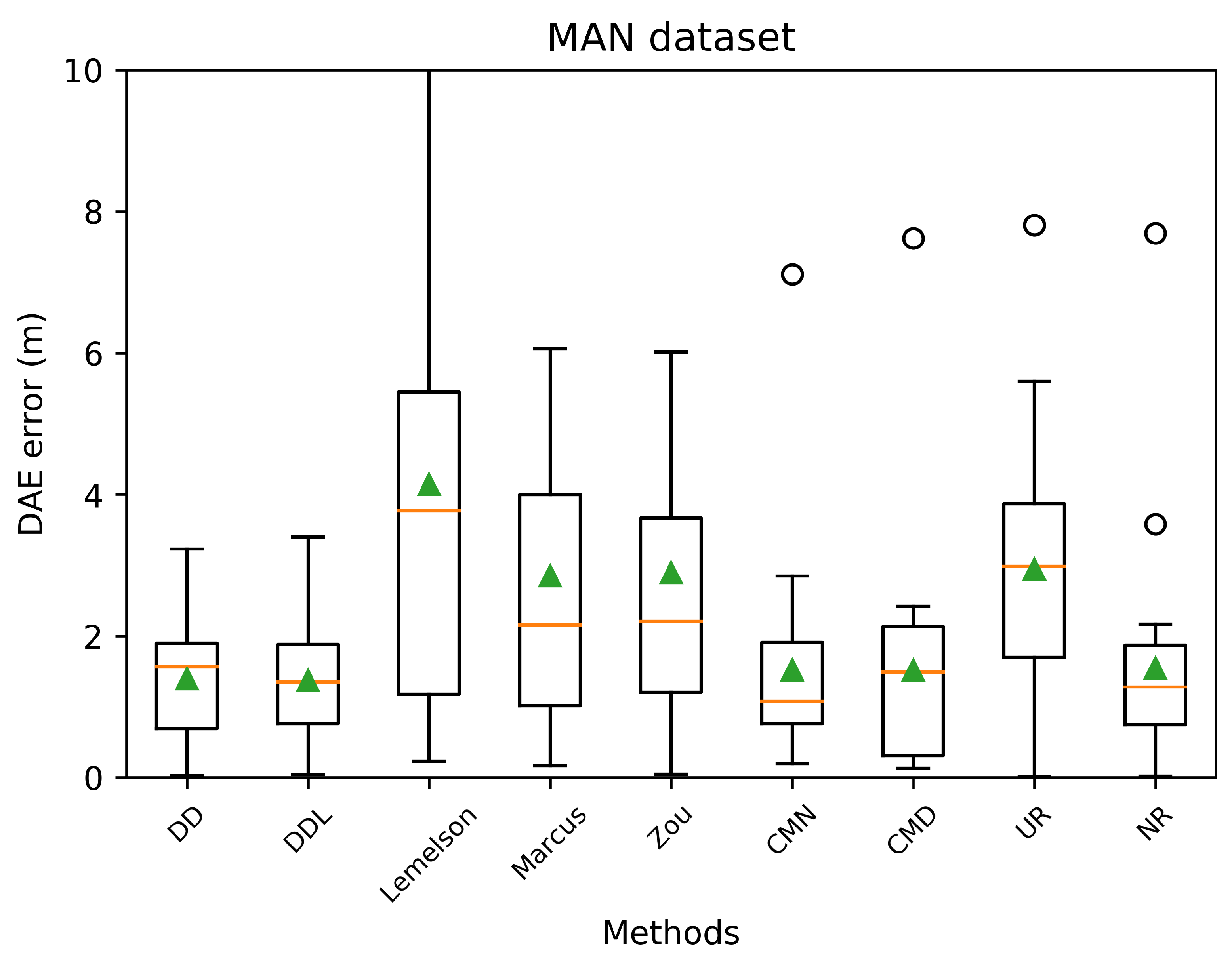
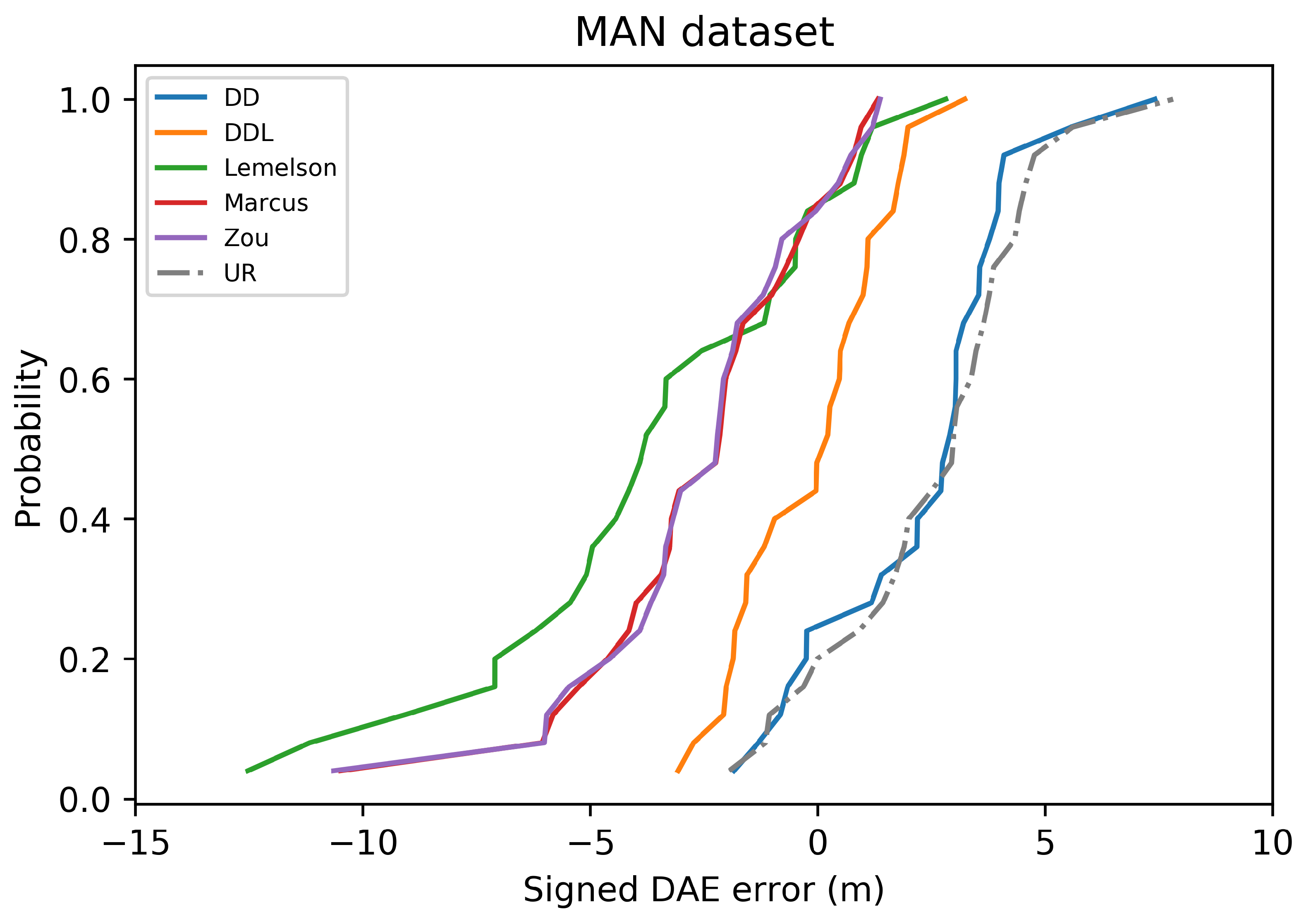
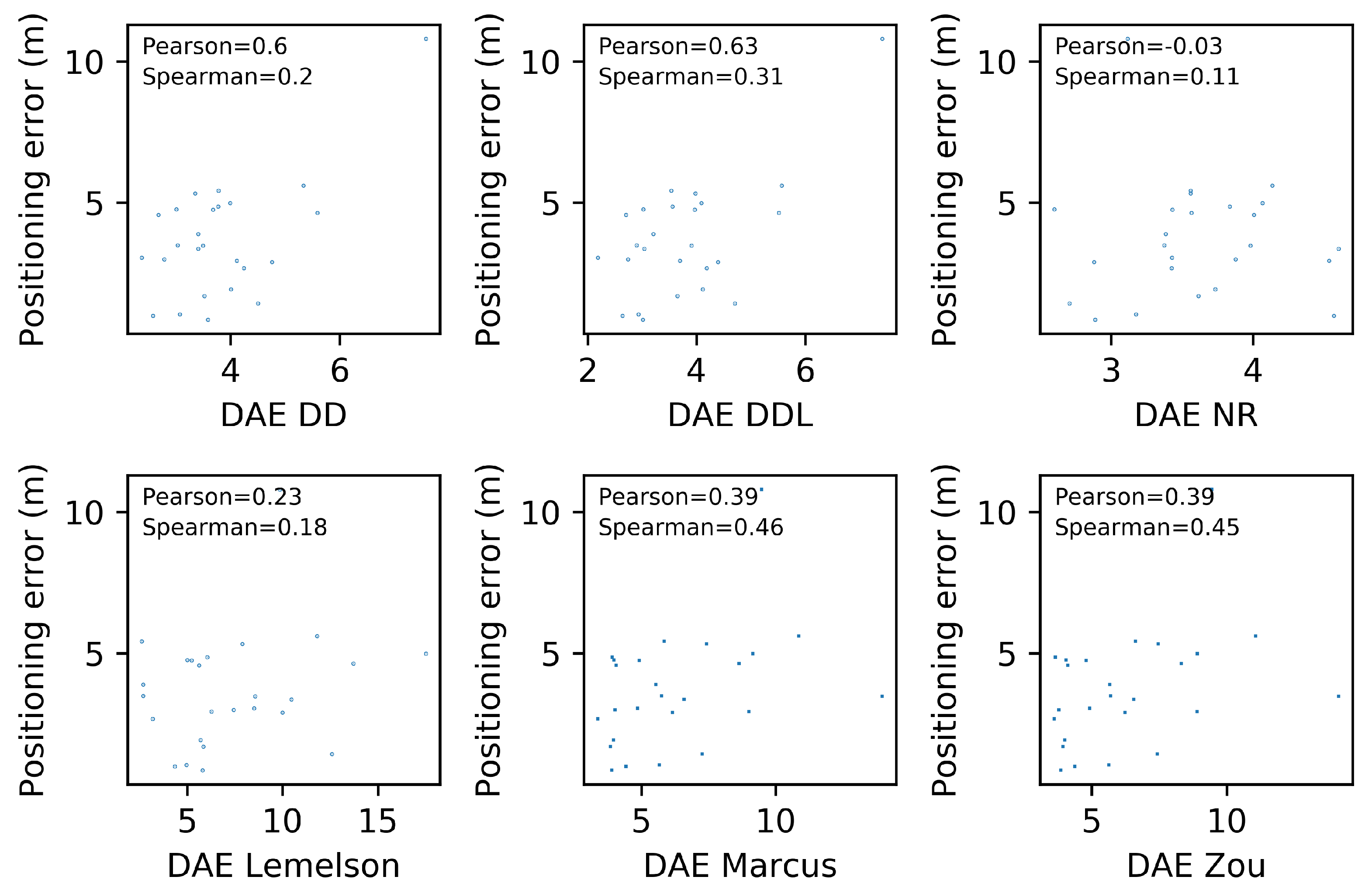
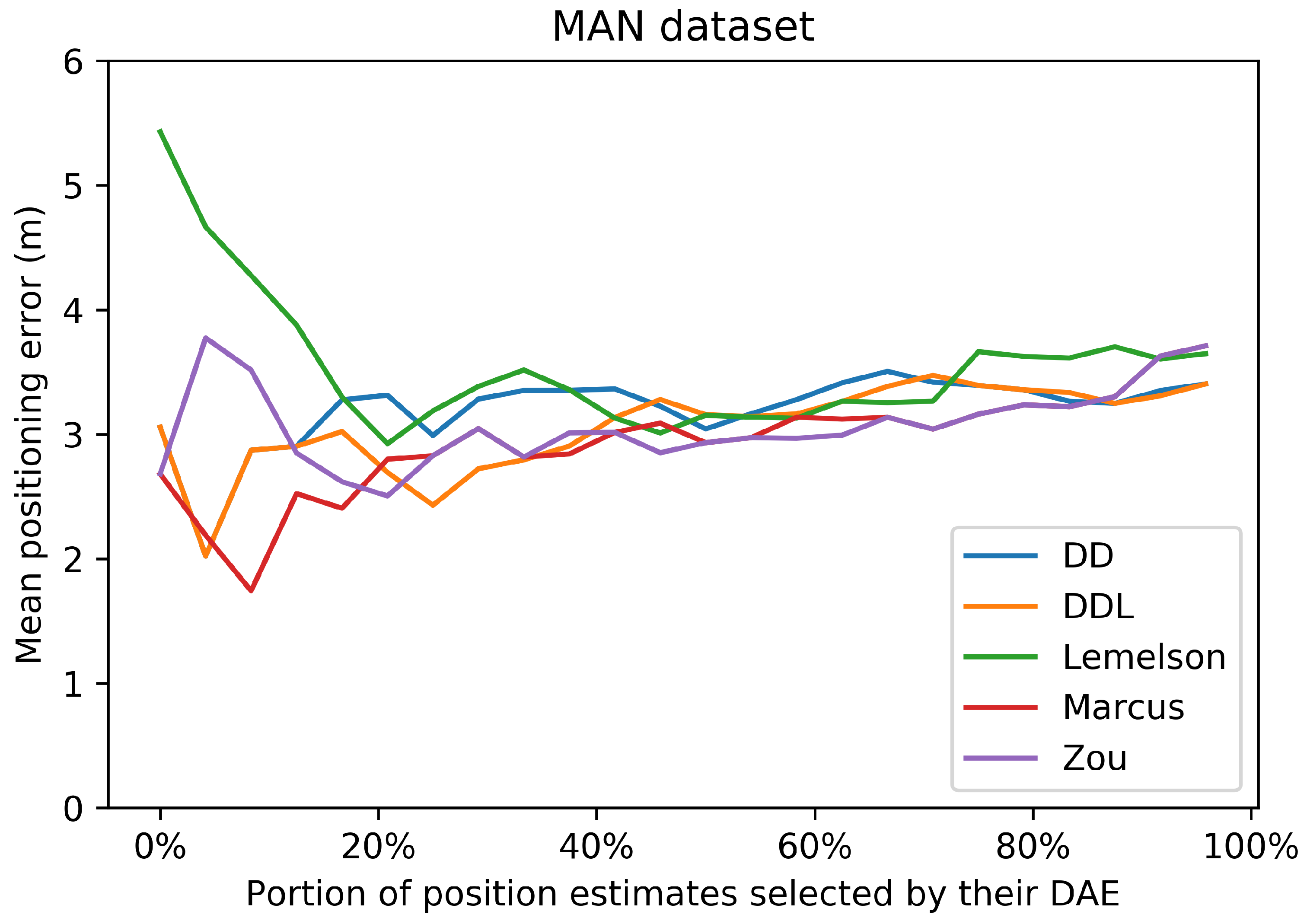
4.4. Tests on the MAN Indoor Dataset
5. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite Systems |
| GPS | Global Positioning System |
| DAE | Dynamic Accuracy Estimation |
| LBS | Location-Based Services |
| IoT | Internet of Things |
| LPWAN | Low-Power Wide-Area Networks |
| IPS | Indoor Positioning System |
| AE | Accuracy Estimation |
| kNN | k-Nearest Neighbors |
| NN | Neural Network |
| DSF | Distance between Similar Fingerprints |
| SVM | Support Vector Machines |
| IPIN | Indoor Positioning and Indoor Navigation |
| CMN | Constant Mean |
| CMD | Constant Median |
| UR | Uniform Random |
| NR | Normal Random |
References
- Huang, H.; Gartner, G.; Krisp, J.M.; Raubal, M.; de Weghe, N.V. Location based services: Ongoing evolution and research agenda. J. Locat. Based Serv. 2018, 12, 63–93. [Google Scholar] [CrossRef]
- Android Development–Location Class–getAccuracy–Definition. Available online: https://developer.android.com/reference/android/location/Location.html#getAccuracy() (accessed on 1 January 2022).
- Moghtadaiee, V.; Dempster, A.G.; Li, B. Accuracy indicator for fingerprinting localization systems. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 1204–1208. [Google Scholar]
- Zou, D.; Meng, W.; Han, S. An Accuracy Estimation Algorithm for Fingerprint Positioning System. In Proceedings of the 2014 Fourth International Conference on Instrumentation and Measurement, Computer, Communication and Control, Harbin, China, 18–20 September 2014; pp. 573–577. [Google Scholar]
- Nikitin, A.; Laoudias, C.; Chatzimilioudis, G.; Karras, P.; Zeinalipour-Yazti, D. Indoor Localization Accuracy Estimation from Fingerprint Data. In Proceedings of the 2017 18th IEEE International Conference on Mobile Data Management (MDM), Daejeon, Korea, 29 May–1 June 2017; pp. 196–205. [Google Scholar]
- Dearman, D.; Varshavsky, A.; de Lara, E.; Truong, K.N. An Exploration of Location Error Estimation. In UbiComp 2007: Ubiquitous Computing; Krumm, J., Abowd, G.D., Seneviratne, A., Strang, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 181–198. [Google Scholar]
- Lemelson, H.; Kjærgaard, M.B.; Hansen, R.; King, T. Error Estimation for Indoor 802.11 Location Fingerprinting. In Location and Context Awareness; Choudhury, T., Quigley, A., Strang, T., Suginuma, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 138–155. [Google Scholar]
- Marcus, P.; Kessel, M.; Werner, M. Dynamic nearest neighbors and online error estimation for SMARTPOS. Int. J. Adv. Internet Technol. 2013, 6, 1–11. [Google Scholar]
- Lemic, F.; Handziski, V.; Aernouts, M.; Janssen, T.; Berkvens, R.; Wolisz, A.; Famaey, J. Regression-Based Estimation of Individual Errors in Fingerprinting Localization. IEEE Access 2019, 7, 33652–33664. [Google Scholar] [CrossRef]
- Li, Y.; He, Z.; Gao, Z.; Zhuang, Y.; Shi, C.; El-Sheimy, N. Toward Robust Crowdsourcing-Based Localization: A Fingerprinting Accuracy Indicator Enhanced Wireless/Magnetic/Inertial Integration Approach. IEEE Internet Things J. 2019, 6, 3585–3600. [Google Scholar] [CrossRef] [Green Version]
- Elbakly, R.; Youssef, M. CONE: Zero-Calibration Accurate Confidence Estimation for Indoor Localization Systems. arXiv 2016, arXiv:1610.02274. [Google Scholar]
- Anagnostopoulos, G.G.; Kalousis, A. Analysing the Data-Driven Approach of Dynamically Estimating Positioning Accuracy. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Lin, K.; Kansal, A.; Lymberopoulos, D.; Zhao, F. Energy-Accuracy Trade-off for Continuous Mobile Device Location. In Proceedings of the 8th International Conference on Mobile Systems, Applications, and Services, MobiSys ’10, San Francisco, CA, USA, 15–18 June 2010; Association for Computing Machinery: New York, NY, USA, 2010; pp. 285–298. [Google Scholar] [CrossRef]
- Zou, D.; Meng, W.; Han, S. Euclidean distance based handoff algorithm for fingerprint positioning of WLAN system. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 1564–1568. [Google Scholar]
- Anagnostopoulos, G.G.; Deriaz, M. Automatic switching between indoor and outdoor position providers. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Lemic, F.; Handziski, V.; Famaey, J. Toward Regression-Based Estimation of Localization Errors in Fingerprinting-Based Localization. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Lemic, F.; Famaey, J. Artificial Neural Network-based Estimation of Individual Localization Errors in Fingerprinting. In Proceedings of the 2020 IEEE 17th Annual Consumer Communications Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020; pp. 1–6. [Google Scholar]
- Torres-Sospedra, J.; Jiménez, A.; Moreira, A.; Lungenstrass, T.; Lu, W.C.; Knauth, S.; Mendoza-Silva, G.; Seco, F.; Pérez-Navarro, A.; Nicolau, M.; et al. Off-Line Evaluation of Mobile-Centric Indoor Positioning Systems: The Experiences from the 2017 IPIN Competition. Sensors 2018, 18, 487. [Google Scholar] [CrossRef] [Green Version]
- Aernouts, M.; Berkvens, R.; Van Vlaenderen, K.; Weyn, M. Sigfox and LoRaWAN Datasets for Fingerprint Localization in Large Urban and Rural Areas. Data 2018, 3, 13. [Google Scholar] [CrossRef] [Green Version]
- Berkvens, R.; Weyn, M.; Peremans, H. Position error and entropy of probabilistic Wi-Fi fingerprinting in the UJIIndoorLoc dataset. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Berkvens, R.; Peremans, H.; Weyn, M. Conditional Entropy and Location Error in Indoor Localization Using Probabilistic Wi-Fi Fingerprinting. Sensors 2016, 16, 1636. [Google Scholar] [CrossRef]
- Khandker, S.; Mondal, R.; Ristaniemi, T. Positioning Error Prediction and Training Data Evaluation in RF Fingerprinting Method. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Grigorios, A.; Alexandros, K. Can I Trust This Location Estimate? Reproducibly Benchmarking the Methods of Dynamic Accuracy Estimation of Localization (code). 2021. Available online: https://zenodo.org/record/5589651#.YfOqHC1Q0UE (accessed on 1 January 2021).
- King, T.; Kopf, S.; Haenselmann, T.; Lubberger, C.; Effelsberg, W. CRAWDAD Dataset Mannheim/Compass (v. 2008-04-11). 2008. Available online: https://crawdad.org/mannheim/compass/20080411 (accessed on 1 January 2022).
- King, T.; Haenselmann, T.; Effelsberg, W. On-demand fingerprint selection for 802.11-based positioning systems. In Proceedings of the 2008 International Symposium on a World of Wireless, Mobile and Multimedia Networks, Newport Beach, CA, USA, 23–26 June 2008; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Moreira, A.; Silva, I.; Torres-Sospedra, J. The DSI Dataset for Wi-Fi Fingerprinting Using Mobile Devices. 2020. Available online: https://zenodo.org/record/3778646#.YfNHtOpBxPY (accessed on 1 January 2022).
- Beder, C.; McGibney, A.; Klepal, M. Predicting the expected accuracy for fingerprinting based WiFi localisation systems. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; pp. 1–6. [Google Scholar]
- de la Osa, C.M.; Anagnostopoulos, G.G.; Togneri, M.; Deriaz, M.; Konstantas, D. Positioning evaluation and ground truth definition for real life use cases. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Moayeri, N.; Li, C.; Shi, L. PerfLoc (Part 2): Performance Evaluation of the Smartphone Indoor Localization Apps. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Lymberopoulos, D.; Liu, J. The Microsoft Indoor Localization Competition: Experiences and Lessons Learned. IEEE Signal Process. Mag. 2017, 34, 125–140. [Google Scholar] [CrossRef]
- Anagnostopoulos, G.G.; de la Osa, C.M.; Nunes, T.; Hammoud, A.; Deriaz, M.; Konstantas, D. Practical evaluation and tuning methodology for indoor positioning systems. In Proceedings of the 2016 Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS), Shanghai, China, 2–4 November 2016; pp. 130–139. [Google Scholar] [CrossRef]
- Anagnostopoulos, G.G.; Deriaz, M.; Konstantas, D. A multiobjective optimization methodology of tuning indoor positioning systems. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Montoliu, R.; Sansano, E.; Torres-Sospedra, J.; Belmonte, O. IndoorLoc platform: A public repository for comparing and evaluating indoor positioning systems. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Adler, S.; Schmitt, S.; Wolter, K.; Kyas, M. A survey of experimental evaluation in indoor localization research. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–10. [Google Scholar] [CrossRef]
- Anagnostopoulos, G.G.; Kalousis, A. Towards Reproducible Indoor Positioning Research. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021; pp. 1–8. [Google Scholar]
- Janssen, T.; Berkvens, R.; Weyn, M. Benchmarking RSS-based localization algorithms with LoRaWAN. Internet Things 2020, 11, 100235. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Richter, P.; Moreira, A.; Mendoza-Silva, G.; Lohan, E.S.; Trilles, S.; Matey-Sanz, M.; Huerta, J. A Comprehensive and Reproducible Comparison of Clustering and Optimization Rules in Wi-Fi Fingerprinting. IEEE Trans. Mob. Comput. 2020. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Trilles, S.; Belmonte, Ó.; Huerta, J. Comprehensive analysis of distance and similarity measures for Wi-Fi fingerprinting indoor positioning systems. Expert Syst. Appl. 2015, 42, 9263–9278. [Google Scholar] [CrossRef]
- Aernouts, M.; Berkvens, R.; Van Vlaenderen, K.; Weyn, M. Sigfox and LoRaWAN Datasets for Fingerprint Localization in Large Urban and Rural Areas. 2019. Available online: https://zenodo.org/record/3904158#.YfNIfOpBxPY (accessed on 1 January 2022).
- Grigorios, A.; Alexandros, K. Analysing the Data-Driven approach of Dynamically Estimating Positioning Accuracy (Data). 2020. Available online: https://zenodo.org/record/4117818#.YfNIfOpBxPY (accessed on 1 January 2022).
- Anagnostopoulos, G.G.; Kalousis, A. A Reproducible Analysis of RSSI Fingerprinting for Outdoor Localization Using Sigfox: Preprocessing and Hyperparameter Tuning. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Grigorios, A.; Alexandros, K. A Reproducible Analysis of RSSI Fingerprinting for Outdoors Localization Using Sigfox: Preprocessing and Hyperparameter Tuning (datasets). 2019. Available online: https://zenodo.org/record/3228744#.YfNIfOpBxPY (accessed on 1 January 2022).
- Li, Y.; Barthelemy, J.; Sun, S.; Perez, P.; Moran, B. Urban vehicle localization in public LoRaWan network. IEEE Internet Things J. 2021. [Google Scholar] [CrossRef]
- Perez-Navarro, A. Accuracy of a single point in kNN applying error propagation theory. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Publications | Baselines |
|---|---|
| Dearman et al. [6] | (1) Stat95: Constant value, equal to the 95th percentile of the error in the training data (2) Random: A random error estimation from the training data |
| Lemelson et al. [7] | Random value, sampled from a uniform distribution, in a range (see Section 2.3.1) |
| Beker et al. [27] | - |
| Moghtadaiee et al. [3] | Best Candidate Set, proposed by [7] |
| Marcus et al. [8] | Best Candidate Set, proposed by [7] + its two alternatives |
| Zou et al. [4] | - |
| Elbakly and Youssef [11] | ‘Distance between the estimated user location and the furthest grid point within the top k grid points’, similar to [4] |
| Nikitin at al. [5] | Custom baseline ‘FSSI’: the distance from the location estimate to the geometrically nearest training fingerprint, similar to [4] |
| Li et al. [10] | (1) A constant value (CT) (2) Best Candidate Set, proposed by [7] |
| Khandker et al. [22] | - |
| Lemic, Handziski, Famaey [16] | Custom metric, based on the use of an (unreferenced in its details) static performance benchmark |
| Lemic et al. [9] | Custom metric, based on a static performance benchmark |
| Lemic and Famaey [17] | Custom metric, based on a static performance benchmark Regression methods proposed in [9] |
| Publications | Absolute Error | Signed Error | Visual Inspection | Correlation | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CDF | Boxplot | Mean | Median | Standard Deviation | CDF of Signed Error | Overestimation % | Overestimation Median | Underestimation Median | Q-Q Plot | Scatter vs. | Plot and | Pearson r | Pearson p-Value | Spearman | Spearman p-Value | Other | |
| Dearman et al. [6] | * | + | Custom Plots | ||||||||||||||
| Lemelson et al. [7] | * | + | + | + | + | ||||||||||||
| Beker et al. [27] | Error Heatmaps | ||||||||||||||||
| Moghtadaiee et al. [3] | Mean AE | ||||||||||||||||
| Marcus et al. [8] | + | ||||||||||||||||
| Zou et al. [4] | + | Est. selection | |||||||||||||||
| de la Osa et al. [28] | + | ||||||||||||||||
| Elbakly and Youssef [11] | + | + | + | + | + | + | |||||||||||
| Berkvens et al. [20] | + | ||||||||||||||||
| Berkvens et al. [21] | + | + | + | ||||||||||||||
| Nikitin at al. [5] | + | Custom Metric | |||||||||||||||
| Li et al. [10] | + | + | Hand-off Eval. | ||||||||||||||
| Khandker et al. [22] | * | Custom plots | |||||||||||||||
| Lemic, Hand., Fam. [16] | + | + | Stud. res. | ||||||||||||||
| Lemic et al. [9] | + | + | Stud. res. | ||||||||||||||
| Lemic and Famaey [17] | + | + | Stud. res. | ||||||||||||||
| Dataset | # Fingerprints | # APs | Area | f/r.p. |
|---|---|---|---|---|
| Sigfox [19,39] | 14,378 | 84 | ∼53 km | 1 |
| LoRaWAN v1.3 [19,39] | 130,430 | 72 | ∼53 km | 1 |
| LoRaWAN v1.3 reduced [12,19,39,40] | 55,375 | 72 | ∼53 km | 1 |
| DSI [26] (radio map, traj.) | (1369, 348) | 157 | 100 m × 18 m | (6, 1) |
| DSI reduced (radio map, traj.) | (230, 348) | 157 | 100 m × 18 m | (1, 1) |
| MAN [24,25] | 14,300 | 28 | 15 m × 36 m | 110 |
| MAN reduced | 166 | 28 | 15 m × 36 m | 1 |
| Method | Mean | Median | 75th | 90th | std | ov% | ov_md | ov_mn | un_md | un_mn | Pearson | Spear. |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DD | 232 | 127 | 247 | 528 | 347 | 67 | 116 | 188 | 160 | 319 | 0.68 | 0.74 |
| DDL | 217 | 114 | 235 | 504 | 346 | 66 | 103 | 175 | 137 | 297 | 0.69 | 0.78 |
| Lemelson | 403 | 236 | 537 | 1002 | 508 | 67 | 330 | 487 | 100 | 234 | 0.61 | 0.67 |
| Marcus | 268 | 139 | 356 | 664 | 393 | 70 | 186 | 272 | 49 | 258 | 0.63 | 0.77 |
| Zou | 268 | 113 | 335 | 714 | 424 | 64 | 155 | 279 | 62 | 250 | 0.58 | 0.76 |
| CMN | 362 | 288 | 401 | 560 | 432 | 71 | 282 | 266 | 325 | 597 | 0.00 | NaN |
| CMD | 318 | 180 | 266 | 736 | 493 | 52 | 158 | 150 | 263 | 501 | 0.00 | NaN |
| UR | 344 | 189 | 352 | 812 | 512 | 41 | 156 | 165 | 242 | 470 | −0.02 | 0.00 |
| NR | 378 | 289 | 449 | 644 | 437 | 69 | 278 | 289 | 336 | 576 | 0.03 | 0.03 |
| Method | Mean | Median | 75th | 90th | std | ov% | ov_md | ov_mn | un_md | un_mn | Pearson | Spear. |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DD | 149 | 85 | 198 | 364 | 210 | 60 | 88 | 125 | 77 | 186 | 0.62 | 0.79 |
| DDL | 138 | 75 | 181 | 340 | 202 | 61 | 77 | 113 | 69 | 176 | 0.67 | 0.82 |
| Lemelson | 223 | 125 | 312 | 573 | 290 | 64 | 184 | 269 | 27 | 144 | 0.56 | 0.76 |
| Marcus | 148 | 70 | 201 | 384 | 220 | 59 | 81 | 142 | 51 | 158 | 0.64 | 0.81 |
| Zou | 151 | 67 | 204 | 394 | 228 | 58 | 78 | 148 | 51 | 157 | 0.62 | 0.80 |
| CMN | 232 | 210 | 259 | 392 | 232 | 65 | 210 | 181 | 211 | 326 | 0.00 | NaN |
| CMD | 216 | 145 | 208 | 496 | 268 | 50 | 139 | 113 | 210 | 319 | NaN | NaN |
| UR | 229 | 143 | 255 | 551 | 285 | 202 | 101 | 109 | 212 | 316 | −0.01 | −0.01 |
| NR | 240 | 197 | 293 | 423 | 237 | 64 | 191 | 190 | 217 | 326 | 0.01 | 0.00 |
| Method | Mean | Median | 75th | 90th | std | ov% | ov_md | ov_mn | un_md | un_mn | Pearson | Spear. |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DD | 3.72 | 2.89 | 4.46 | 9.66 | 3.54 | 16.0 | 0.72 | 1.04 | 3.24 | 4.21 | 0.15 | 0.25 |
| DDL | 3.69 | 2.90 | 4.32 | 9.40 | 3.53 | 15.0 | 0.81 | 1.08 | 3.20 | 4.15 | 0.16 | 0.25 |
| Lemelson | 3.14 | 2.29 | 4.16 | 7.16 | 2.84 | 52.0 | 2.33 | 3.14 | 2.29 | 3.15 | 0.28 | 0.33 |
| Marcus | 2.91 | 2.31 | 3.55 | 5.46 | 2.87 | 50.0 | 2.12 | 3.32 | 2.39 | 2.50 | 0.53 | 0.42 |
| Zou | 2.91 | 2.30 | 3.52 | 5.50 | 2.92 | 51.0 | 2.14 | 3.29 | 2.35 | 2.51 | 0.53 | 0.42 |
| CMN | 3.73 | 2.59 | 4.94 | 9.49 | 3.56 | 13.0 | 1.37 | 1.35 | 3.01 | 4.08 | 0.00 | NaN |
| CMD | 3.94 | 2.88 | 5.23 | 9.78 | 3.61 | 13.0 | 1.08 | 1.06 | 3.30 | 4.38 | −0.00 | NaN |
| UR | 5.16 | 4.18 | 6.69 | 11.75 | 4.06 | 8.0 | 0.61 | 0.89 | 4.43 | 5.52 | −0.18 | −0.19 |
| NR | 3.80 | 2.60 | 5.07 | 9.60 | 3.55 | 16.0 | 1.24 | 1.21 | 3.25 | 4.28 | 0.00 | −0.07 |
| Method | Mean | Median | 75th | 90th | std | ov% | ov_md | ov_mn | un_md | un_mn | Pearson | Spear. |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DD | 1.39 | 1.56 | 1.90 | 2.47 | 0.88 | 48.0 | 1.69 | 1.57 | 1.08 | 1.22 | 0.60 | 0.20 |
| DDL | 1.37 | 1.33 | 1.88 | 2.17 | 0.84 | 44.0 | 1.65 | 1.65 | 0.88 | 1.15 | 0.63 | 0.31 |
| Lemelson | 4.14 | 3.77 | 5.45 | 8.29 | 3.26 | 84.0 | 4.16 | 4.65 | 1.08 | 1.44 | 0.23 | 0.18 |
| Marcus | 2.85 | 2.16 | 3.99 | 5.60 | 2.29 | 84.0 | 3.05 | 3.22 | 0.87 | 0.89 | 0.39 | 0.46 |
| Zou | 2.89 | 2.21 | 3.67 | 5.77 | 2.28 | 84.0 | 3.02 | 3.26 | 0.96 | 0.94 | 0.39 | 0.45 |
| CMN | 1.52 | 1.07 | 1.91 | 2.68 | 1.38 | 56.0 | 0.91 | 1.35 | 1.17 | 1.73 | NaN | NaN |
| CMD | 1.52 | 1.49 | 2.13 | 2.30 | 1.47 | 44.0 | 1.25 | 1.14 | 1.58 | 1.81 | NaN | NaN |
| UR | 2.94 | 2.98 | 3.87 | 4.68 | 1.75 | 20.0 | 1.07 | 0.90 | 3.42 | 3.45 | 0.07 | −0.09 |
| NR | 1.54 | 1.28 | 1.87 | 2.15 | 1.47 | 48.0 | 1.44 | 1.51 | 1.08 | 1.58 | −0.03 | 0.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anagnostopoulos, G.G.; Kalousis, A. Can I Trust This Location Estimate? Reproducibly Benchmarking the Methods of Dynamic Accuracy Estimation of Localization. Sensors 2022, 22, 1088. https://doi.org/10.3390/s22031088
Anagnostopoulos GG, Kalousis A. Can I Trust This Location Estimate? Reproducibly Benchmarking the Methods of Dynamic Accuracy Estimation of Localization. Sensors. 2022; 22(3):1088. https://doi.org/10.3390/s22031088
Chicago/Turabian StyleAnagnostopoulos, Grigorios G., and Alexandros Kalousis. 2022. "Can I Trust This Location Estimate? Reproducibly Benchmarking the Methods of Dynamic Accuracy Estimation of Localization" Sensors 22, no. 3: 1088. https://doi.org/10.3390/s22031088
APA StyleAnagnostopoulos, G. G., & Kalousis, A. (2022). Can I Trust This Location Estimate? Reproducibly Benchmarking the Methods of Dynamic Accuracy Estimation of Localization. Sensors, 22(3), 1088. https://doi.org/10.3390/s22031088