
Customized Textile Capacitive Insole Sensor for Center of Pressure Analysis




Abstract
1. Introduction
2. Methods
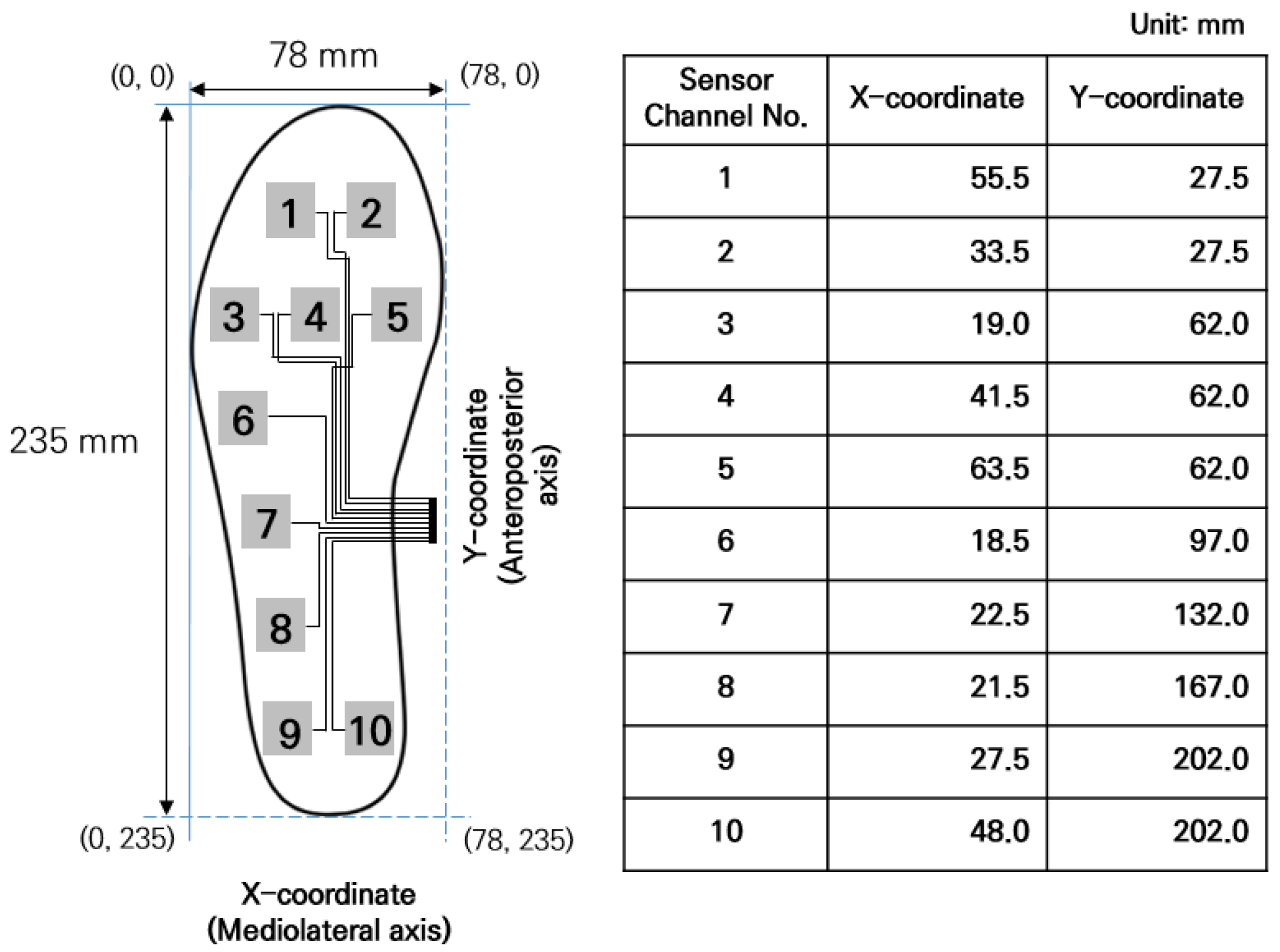
2.1. Plantar Pressure Measurement System
2.2. Performance Test of the Plantar Pressure Measurement System
2.2.1. Plantar Pressure Segment Recognition (Baseline Test)
2.2.2. Dynamic Gait COP Measurement (Main Experiment)
2.3. Gait Signal Processing
2.4. Gait Index Extraction
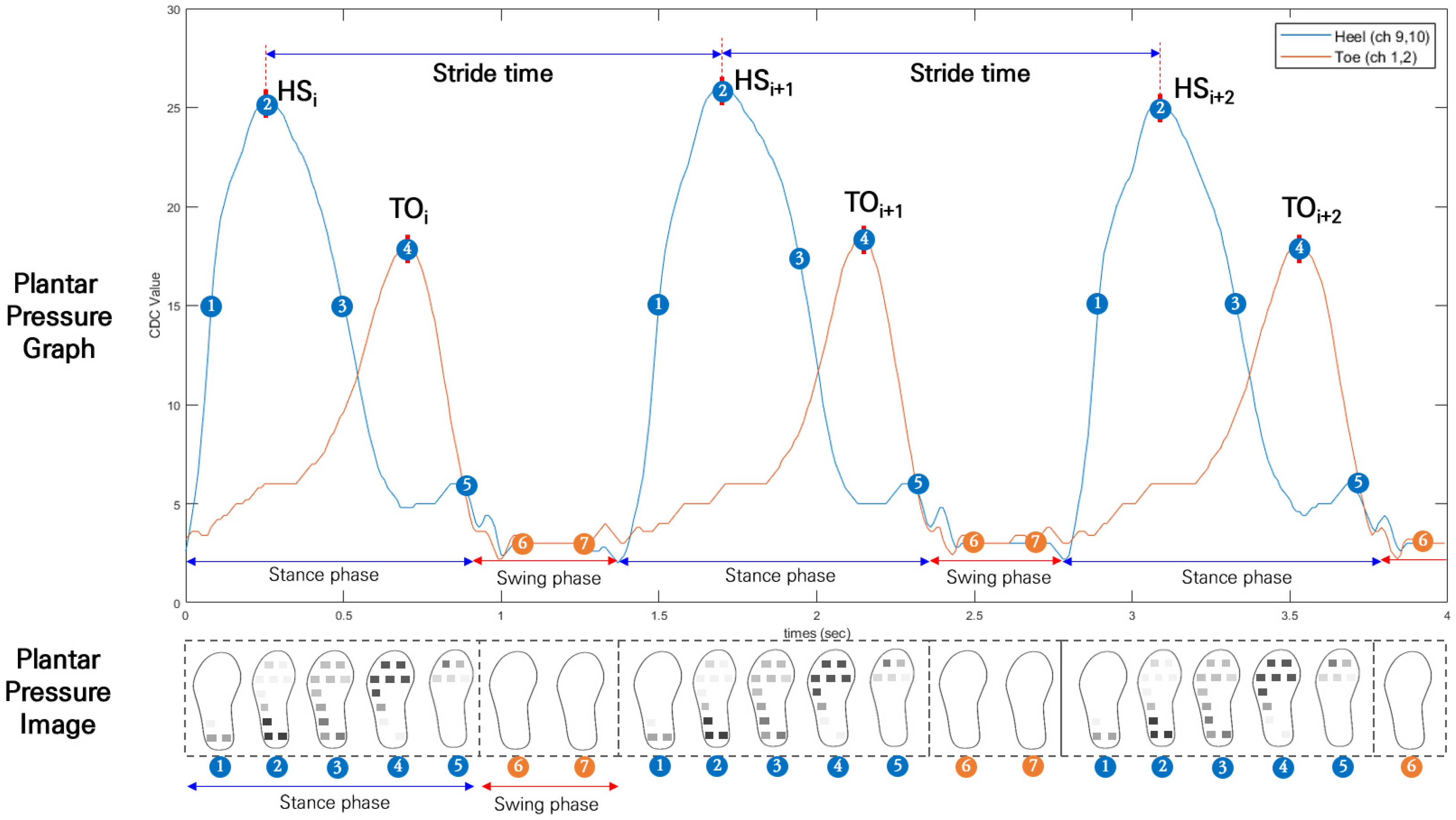
2.4.1. Stride Time, Stance and Swing Phase
2.4.2. Cadence
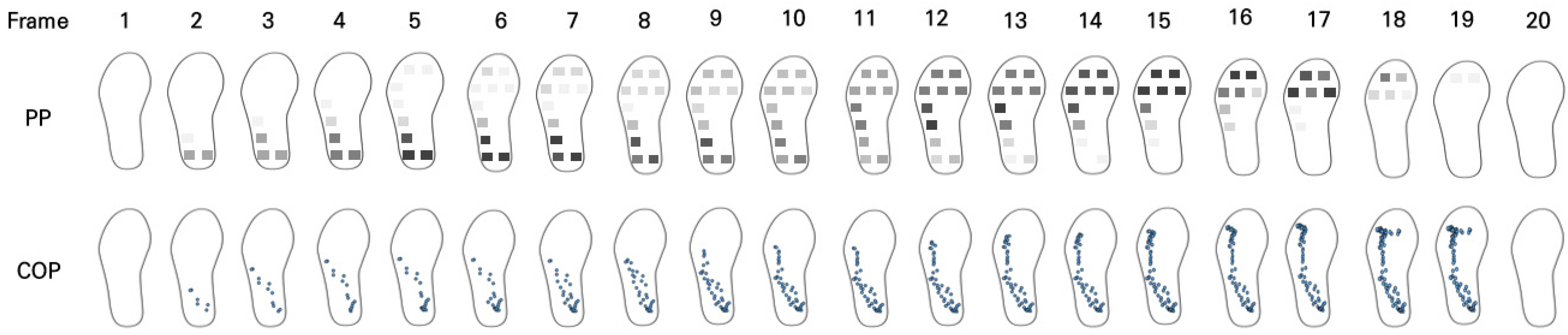
2.4.3. Center of Pressure
2.5. Data Anlaysis
3. Results of the Plantar Pressure Measurement System Performance Test
3.1. Plantar Pressure Segment Recognition
3.2. Dynamic Gait COP Measurement
4. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hébert-Losier, K.; Murray, L. Reliability of centre of pressure, plantar pressure, and plantar-flexion isometric strength measures: A systematic review. Gait Posture 2019, 75, 46–62. [Google Scholar] [CrossRef]
- Skopljak, A.; Muftic, M.; Sukalo, A.; Masic, I. Pedobarography in Diagnosis and Clinical Application. Acta Inform. Med. 2014, 22, 374–378. [Google Scholar] [CrossRef] [PubMed]
- Mettler, A.; Chinn, L.; Saliba, S.A.; McKeon, P.O.; Hertel, J. Balance Training and Center-of-Pressure Location in Participants with Chronic Ankle Instability. J. Athl. Train. 2015, 50, 343–349. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Peng, K. A Multi-View Gait Recognition Method Using Deep Convolutional Neural Network and Channel Attention Mechanism. Comput. Model. Eng. Sci. 2020, 125, 345–363. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, C.; Ma, H.; Li, S. Learning Efficient Spatial-Temporal Gait Features with Deep Learning for Human Identification. Neuroinformatics 2018, 16, 457–471. [Google Scholar] [CrossRef]
- Ho, J.G.; Kim, D.G.; Kim, Y.; Jang, S.; Min, S.D. Development of Plantar Pressure Measurement System and Personal Classification Study based on Plantar Pressure Image. KSII Trans. Internet Inform. Syst. 2021, 15, 3875–3891. [Google Scholar]
- Zhang, Y.; Zheng, Y.; Zhang, G.; Qian, K.; Qian, C.; Yang, Z. GaitSense: Towards Ubiquitous Gait-Based Human Identification with Wi-Fi. ACM Trans. Sens. Netw. 2021, 18, 1–24. [Google Scholar] [CrossRef]
- Wang, C.; Kim, Y.; Lee, S.H.; Sung, N.-J.; Min, S.D.; Choi, M.-H. Activity and Safety Recognition using Smart Work Shoes for Construction Worksite. KSII Trans. Internet Inf. Syst. 2020, 14, 654–670. [Google Scholar]
- Antwi-Afari, M.F.; Li, H. Fall risk assessment of construction workers based on biomechanical gait stability parameters using wearable insole pressure system. Adv. Eng. Inform. 2018, 38, 683–694. [Google Scholar] [CrossRef]
- Doyle, R.J.; Hsiao-Wecksler, E.; Ragan, B.G.; Rosengren, K.S. Generalizability of center of pressure measures of quiet standing. Gait Posture 2007, 25, 166–171. [Google Scholar] [CrossRef]
- Buldt, A.K.; Forghany, S.; Landorf, K.B.; Murley, G.S.; Levinger, P.; Menz, H.B. Centre of pressure characteristics in normal, planus and cavus feet. J. Foot Ankle Res. 2018, 11, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Tao, J.; Dong, M.; Li, L.; Wang, C.; Li, J.; Liu, Y.; Bao, R.; Pan, C. Real-time pressure mapping smart insole system based on a controllable vertical pore dielectric layer. Microsyst. Nanoeng. 2020, 6, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Golriz, S.; Hebert, J.J.; Foreman, K.B.; Walker, B.F. The reliability of a portable clinical force plate used for the assessment of static postural control: Repeated measures reliability study. Chiropr. Man. Ther. 2012, 20, 14. [Google Scholar] [CrossRef] [PubMed]
- Nazarahari, M.; Khandan, A.; Khan, A.; Rouhani, H. Foot angular kinematics measured with inertial measurement units: A reliable criterion for real-time gait event detection. J. Biomech. 2021, 130, 110880. [Google Scholar] [CrossRef] [PubMed]
- Aqueveque, P.; Germany, E.; Osorio, R.; Pastene, F. Gait Segmentation Method Using a Plantar Pressure Measurement System with Custom-Made Capacitive Sensors. Sensors 2020, 20, 656. [Google Scholar] [CrossRef]
- de Fazio, R.; Perrone, E.; Velázquez, R.; De Vittorio, M.; Visconti, P. Development of a Self-Powered Piezo-Resistive Smart Insole Equipped with Low-Power BLE Connectivity for Remote Gait Monitoring. Sensors 2021, 21, 4539. [Google Scholar] [CrossRef]
- Sorrentino, I.; Chavez, F.J.A.; Latella, C.; Fiorio, L.; Traversaro, S.; Rapetti, L.; Tirupachuri, Y.; Guedelha, N.; Maggiali, M.; Dussoni, S.; et al. A Novel Sensorised Insole for Sensing Feet Pressure Distributions. Sensors 2020, 20, 747. [Google Scholar] [CrossRef]
- Choi, H.S.; Lee, C.H.; Shim, M.; Han, J.I.; Baek, Y.S. Design of an Artificial Neural Network Algorithm for a Low-Cost Insole Sensor to Estimate the Ground Reaction Force (GRF) and Calibrate the Center of Pressure (CoP). Sensors 2018, 18, 4349. [Google Scholar] [CrossRef]
- Hu, X.; Zhao, J.; Peng, D.; Sun, Z.; Qu, X. Estimation of Foot Plantar Center of Pressure Trajectories with Low-Cost Instrumented Insoles Using an Individual-Specific Nonlinear Model. Sensors 2018, 18, 421. [Google Scholar] [CrossRef]
- Refai, M.I.M.; van Beijnum, B.J.F.; Buurke, J.H.; Veltink, P.H. Gait and dynamic balance sensing using wearable foot sensors. IEEE Trans.Neural Syst. Rehabil. Eng. 2018, 27, 218–227. [Google Scholar] [CrossRef]
- Chandel, V.; Singhal, S.; Sharma, V.; Ahmed, N.; Ghose, A. Pi-sole: A Low-Cost Solution for Gait Monitoring Using Off-the-Shelf Piezoelectric Sensors and IMU. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23 July 2019. [Google Scholar]
- Zhang, H.; Zanotto, D.; Agrawal, S.K. Estimating CoP Trajectories and Kinematic Gait Parameters in Walking and Running Using Instrumented Insoles. IEEE Robot. Autom. Lett. 2017, 2, 2159–2165. [Google Scholar] [CrossRef]
- Masihi, S.; Panahi, M.; Maddipatla, D.; Bose, A.K.; Zhang, X.; Hanson, A.J.; Palaniappan, V.; Narakathu, B.B.; Bazuin, B.J.; Atashbar, M.Z. A Novel Printed Fabric Based Porous Capacitive Pressure Sensor for Flexible Electronic Applications. In Proceedings of the 2019 IEEE sensors, Montreal, QC, Canada, 27 October 2019. [Google Scholar]
- Wang, C.; Kim, Y.; Min, S.D. Soft-Material-Based Smart Insoles for a Gait Monitoring System. Materials 2018, 11, 2435. [Google Scholar] [CrossRef] [PubMed]
- Chhoeum, V.; Kim, Y.; Min, S.-D. Estimation of Knee Joint Angle Using Textile Capacitive Sensor and Artificial Neural Network Implementing with Three Shoe Types at Two Gait Speeds: A Preliminary Investigation. Sensors 2021, 21, 5484. [Google Scholar] [CrossRef] [PubMed]
- Shu, L.; Hua, T.; Wang, Y.; Li, Q.; Feng, D.D.; Tao, X. In-Shoe Plantar Pressure Measurement and Analysis System Based on Fabric Pressure Sensing Array. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 767–775. [Google Scholar] [PubMed]
- Qihang, W. A new system for foot pressure measurement and gait analysis. J. Biomed. Eng. 2000, 19, 32–40. [Google Scholar]
- Liu, T.; Inoue, Y.; Shibata, K. A Wearable Ground Reaction Force Sensor System and Its Application to the Measurement of Extrinsic Gait Variability. Sensors 2010, 10, 10240–10255. [Google Scholar] [CrossRef]
- Morin, P.; Muller, A.; Pontonnier, C.; Dumont, G. Evaluation of the Foot Center of Pressure Estimation from Pressure Insoles during Sidestep Cuts, Runs and Walks. Sensors 2022, 22, 5628. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | W-290-PCN |
|---|---|
| Plating type | Nickel, Copper |
| Fabric type | Woven |
| Weight (g/m2) | 81 ± 5 |
| Thickness (mm) | 0.1 ± 0.01 |
| Breaking strength (kg/5 cm) | 392 ± 10 |
| Variables | Values | |||||
|---|---|---|---|---|---|---|
| Subject 1 | Subject 2 | Subject 3 | Subject 4 | Ave ± SD | ||
| Gender (M/F) | Female | Female | Female | Female | - | |
| Age (years) | 24 | 23 | 23 | 22 | 23.00 ± 0.82 | |
| Height (cm) | 157 | 159 | 161 | 158 | 158.75 ± 1.71 | |
| Weight (kg) | 47 | 49 | 50 | 52 | 49.50 ± 2.08 | |
| Body Mass Index (kg/m2) | 19 | 19 | 19 | 21 | 19.64 ± 0.80 | |
| Shoe size (mm) | 230 | 235 | 235 | 230 | ||
| Gait speed (km/h) | Comfortable | 2.50 | 2.50 | 2.30 | 2.20 | 2.38 ± 0.15 |
| Fast | 5.00 | 5.00 | 5.00 | 5.00 | 5.00 ± 0.00 | |
| I-TCPs | F-scan | ||
|---|---|---|---|
| Walking | Cadence (steps/min) | 50.00 ± 2.29 * | 50.00 ± 2.29 * |
| Running | Cadence (steps/min) | 77.67 ± 0.29 * | 77.67 ± 0.29 * |
| Comfortable Speed | ||||||
|---|---|---|---|---|---|---|
| Subject No. | 1 | 2 | 3 | 4 | Ave ± SD | |
| RMSE (mm) | * COPx | 1.07 | 1.56 | 1.77 | 0.74 | 1.29 ± 0.47 |
| ** COPy | 7.99 | 12.38 | 19.68 | 10.15 | 12.55 ± 5.08 | |
| *** COP(x,y) | 8.06 | 12.48 | 19.76 | 10.18 | 12.62 ± 5.10 | |
| Correlation Coefficient | * COPx | 0.47 | 0.58 | 0.65 | 0.46 | 0.54 ± 0.09 |
| ** COPy | 0.97 | 0.98 | 0.92 | 0.94 | 0.95 ± 0.03 | |
| *** COP(x,y) | 0.98 | 0.95 | 0.98 | 0.97 | 0.97 ± 0.01 | |
| Fast Speed | ||||||
|---|---|---|---|---|---|---|
| Subject No. | 1 | 2 | 3 | 4 | Ave ± SD | |
| RMSE (mm) | * COPx | 1.37 | 1.18 | 1.96 | 0.83 | 1.34 ± 0.47 |
| ** COPy | 11.01 | 13.16 | 5.93 | 14.92 | 11.26 ± 3.89 | |
| *** COP(x,y) | 11.09 | 13.21 | 6.25 | 14.94 | 11.37 ± 3.76 | |
| Correlation Coefficient | * COPx | 0.77 | 0.47 | 0.50 | 0.23 | 0.49 ± 0.22 |
| ** COPy | 0.97 | 0.93 | 0.91 | 0.94 | 0.94 ± 0.03 | |
| *** COP(x,y) | 0.95 | 0.96 | 0.96 | 0.92 | 0.95 ± 0.02 | |
| Author | Sensor Type | Condition (Gait Speed) | RMSE (mm) | ||
|---|---|---|---|---|---|
| COPx | COPy | COP(x,y) | |||
| Choi et al. [18] (2018) | Force Sensitive Resistor (six channels) | Walking (1 km/h) | - | - | 19.01 |
| Walking (2 km/h) | - | - | 17.15 | ||
| Zhang et al. [22] (2017) | Piezo-resistive (eight channels) | Walking (Comfortable) | 4.10 ± 0.60 | 10.10 ± 2.90 | - |
| Running (Comfortable) | 4.20 ± 0.50 | 10.90 ± 1.80 | - | ||
| Morin et al. [29] (2022) | Capacitive (sixteen channels) | Walking (Comfortable) | 4.20 ± 1.00 | 12.00 ± 3.00 | - |
| Running (Comfortable) | 5.30 ± 2.00 | 16.00 ± 5.00 | - | ||
| Below is the results from this study for comparison with above references. | |||||
| Capacitive (ten channels) | Walking (2.38 km/h) | 1.29 ± 0.47 | 12.55 ± 5.08 | 12.62 ± 5.10 | |
| Walking (5 km/h) | 1.34 ± 0.47 | 11.26 ± 3.89 | 11.37 ± 3.76 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ho, J.-G.; Kim, Y.; Min, S.-D. Customized Textile Capacitive Insole Sensor for Center of Pressure Analysis. Sensors 2022, 22, 9390. https://doi.org/10.3390/s22239390
Ho J-G, Kim Y, Min S-D. Customized Textile Capacitive Insole Sensor for Center of Pressure Analysis. Sensors. 2022; 22(23):9390. https://doi.org/10.3390/s22239390
Chicago/Turabian StyleHo, Jong-Gab, Young Kim, and Se-Dong Min. 2022. "Customized Textile Capacitive Insole Sensor for Center of Pressure Analysis" Sensors 22, no. 23: 9390. https://doi.org/10.3390/s22239390
APA StyleHo, J.-G., Kim, Y., & Min, S.-D. (2022). Customized Textile Capacitive Insole Sensor for Center of Pressure Analysis. Sensors, 22(23), 9390. https://doi.org/10.3390/s22239390