

Research on Multi-Fault Diagnosis Method Based on Time Domain Features of Vibration Signals
Abstract
:1. Introduction
2. Theory and Methods
2.1. Theory
GRU
2.2. Pearson Correlation Coefficient
2.3. Methods
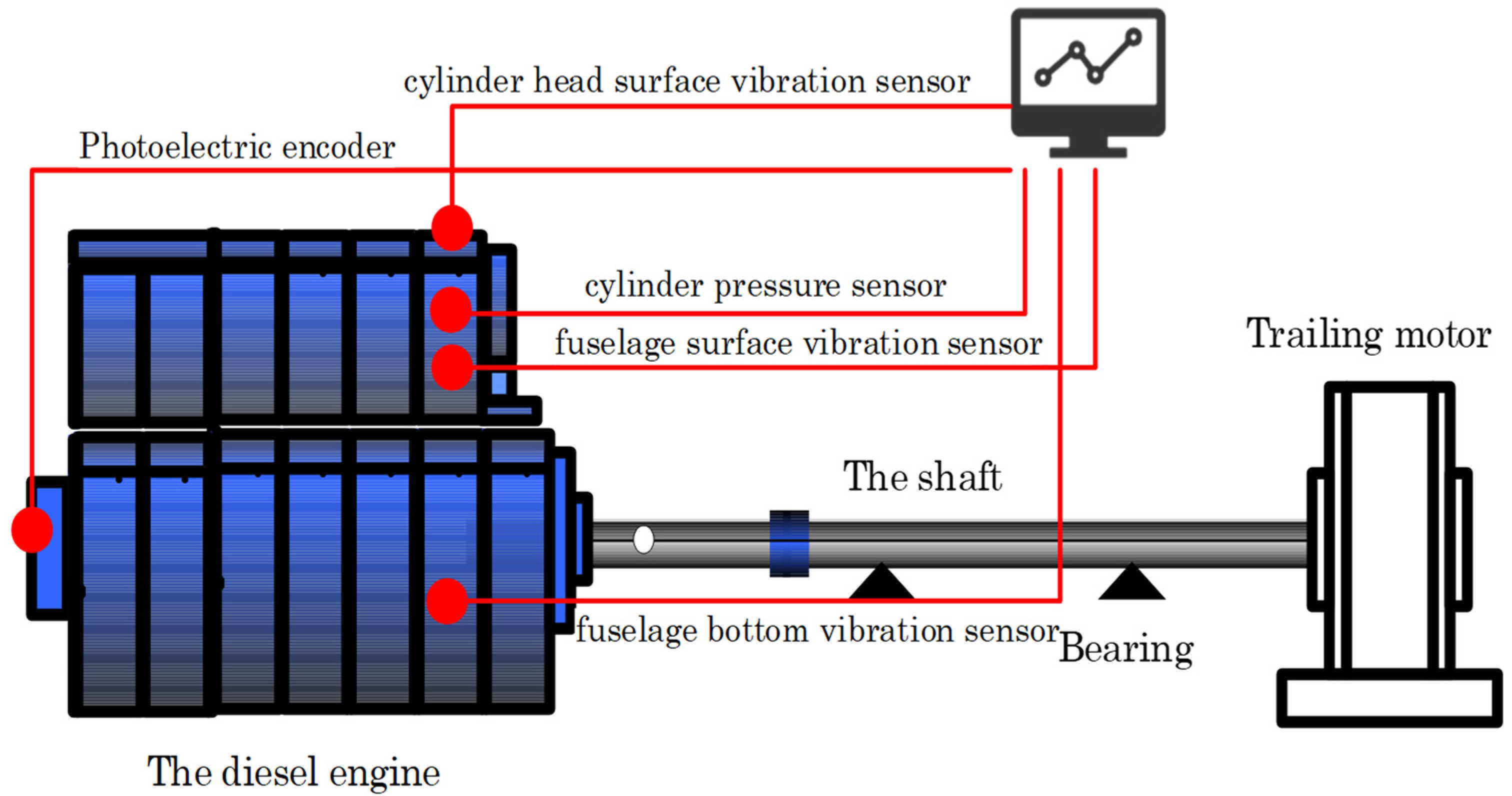
2.3.1. Construction of Test Bench
2.3.2. Selection Features of Double Pearson Correlation Coefficient
- A.
- Sensor signal selection
- B.
- Feature selection
2.3.3. Data Enhancement and Division
2.3.4. Model Training
- A.
- Single-fault diagnosis model training
- B.
- Multi-fault diagnosis model training
3. Results
3.1. Single-Fault Diagnosis
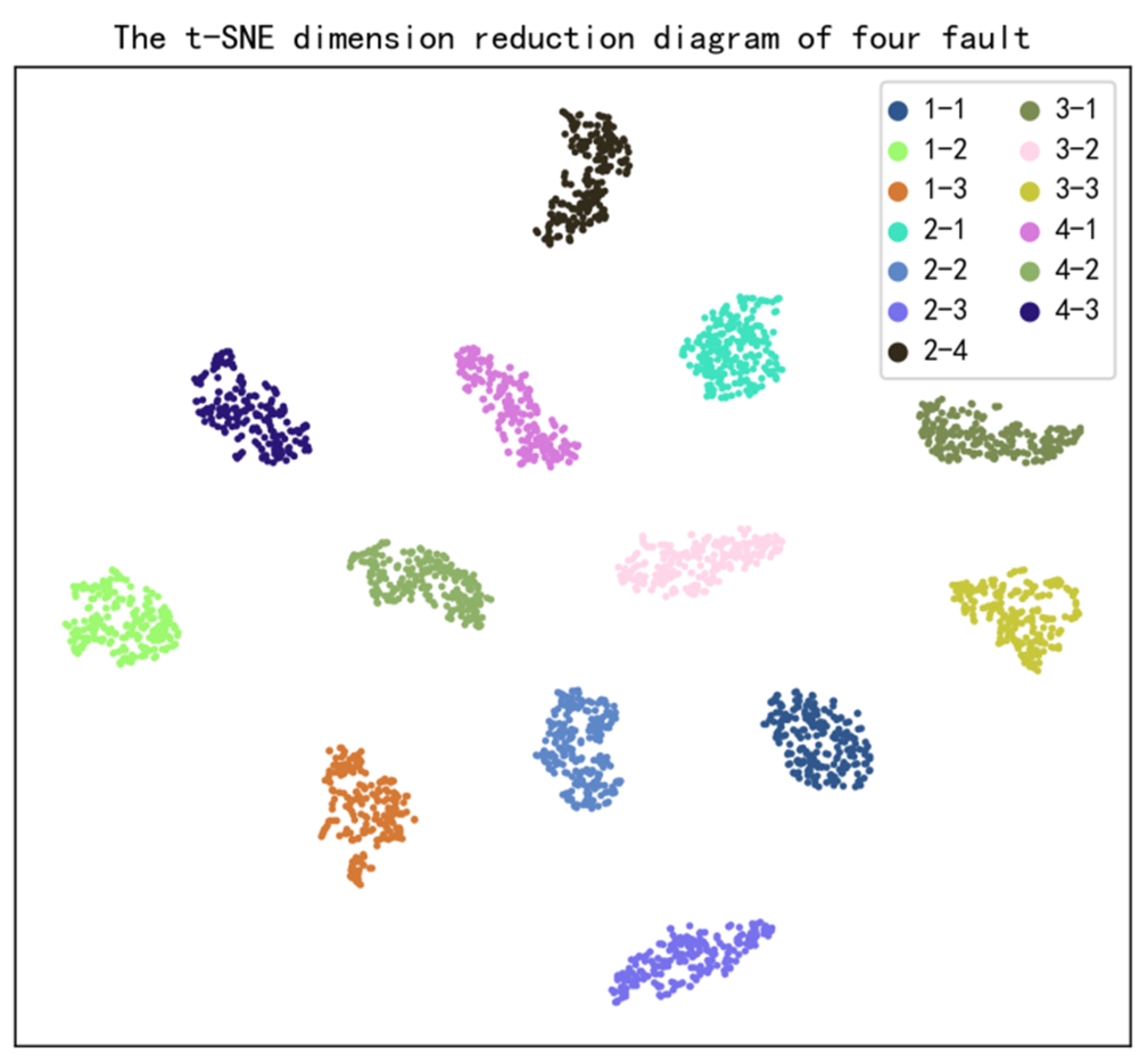
3.2. Multi-Fault Diagnosis
3.3. Analysis of Influencing Factors
3.3.1. Dropout Rate
3.3.2. Number of Vibration Signals Selected
3.4. Comparison of Different Feature Extraction Methods
3.5. Comparison of Different Networks
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gao, T.L.; Liu, W.L.; Zhang, W.J. Fault identification and location strategy of photovoltaic power station based on gated recurrent unit. Therm. Power Gener. 2022, 51, 21–28. [Google Scholar]
- Shi, J.W.; Hou, L.Q. Fault Diagnosis of Rolling Bearing Based on Bi-directional Gated Recurrent Unit Network. Electr. Power Sci. Eng. 2021, 37, 64–70. [Google Scholar]
- Zhang, L.; Zhen, C.Z.; Yi, J.Y.; Cai, B.H.; Xu, T.P.; Yin, W.H. Dual-channel feature fusion CNN-GRU gearbox fault diagnosis. J. Vib. Shock 2021, 40, 239–245. [Google Scholar]
- Zhou, B.; Jin, S.J.; Mei, J.M.; Shen, H. Feature enhancement of diesel engine’ piston-cylinder wear-out faults based on teager energy operator. J. Vib. Shock 2017, 36, 84–89. [Google Scholar]
- Li, C.G.; Wang, B.; Wang, B.S.; Bai, G.L. Study on fault diagnosis of engine cylinders with wavelets. J. Dalian Marit. Univ. 2002, 28, 72–74. [Google Scholar]
- Jiang, A.H.; Li, X.Y.; Wang, W.; Zhang, J. Misfire fault diagnosis of engine based on wavelet analysis. Trans. Chin. Soc. Agric. Eng. 2007, 153–157. [Google Scholar]
- Bi, F.R.; Tang, D.J.; Zhang, L.P.; Li, X.; Ma, T.; Yang, X. Diesel Engine Fault Diagnosis Method Based on Optimized Variational Mode Decomposition and Kernel Fuzzy C-means Clustering. J. Vib. Meas. Diagn. 2020, 40, 853–858. [Google Scholar]
- Zhang, H.L.; Song, Y.D.; Li, X.; Bi, F.R.; Bi, X.B.; Tang, D.J.; Yang, X.; Ma, T. Engine Faults Detection Based on Optimized VMD and Euclidean Distance. J. Vib. Meas. Diagn. 2020, 40, 911–915. [Google Scholar]
- Qiao, X.Y.; Gu, C.; Han, L.J. Diesel Engine Fault Diagnosis Method Based on VMD and Multi-Scale Dispersion Entropy. Automot. Eng. 2020, 42, 1139–1144. [Google Scholar]
- Yang, D.; Song, H.J.; Huo, B.Q.; Zhao, H.P.; Ma, W.H. Research on diesel engine fault diagnosis based on feature correlation analysis. Mod. Manuf. Eng. 2018, 459, 147–152. [Google Scholar]
- Xu, X.; Li, L.L.; Pan, H.X.; Jing, X.R. Application of optimized MCKD and energy entropy in diesel engine fault diagnosis. Foreign Electron. Meas. Technol. 2022, 41, 132–137. [Google Scholar]
- Xiao, X.; Chai, L.; Sheng, Y. Fault severity diagnosis of squirrel-cage induction motors in transient regime based on curve fitting. In Proceedings of the 2017 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), Siem Reap, Cambodia, 18–20 June 2017; pp. 1825–1830. [Google Scholar]
- Pan, W.; He, H. An Intelligent Fault Severity Diagnosis Method based on Hybrid Ordinal Classification. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; pp. 2414–2417. [Google Scholar]
- Jha, R.K.; Swami, P.D. Fault diagnosis and severity analysis of rolling bearings using vibration image texture enhancement and multiclass support vector machines. Appl. Acoust. 2021, 182, 108243. [Google Scholar] [CrossRef]
- Almounajjed, A.; Sahoo, A.K.; Kumar, M.K. Diagnosis of stator fault severity in induction motor based on discrete wavelet analysis. Measurement 2021, 182, 109780. [Google Scholar] [CrossRef]
- Hang, J.; Li, Y.; Ding, S.; Tang, C.; Wang, Q. High-resistance connection fault severity detection in a permanent magnet synchronous machine drive system. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017; pp. 1–4. [Google Scholar]
- Taha, I.B.M.; Dessouky, S.S.; Ghoneim, S.S.M. Transformer fault types and severity class prediction based on neural pattern-recognition techniques. Electr. Power Syst. Res. 2021, 191, 106899. [Google Scholar] [CrossRef]
- Yang, H.; Li, W.D.; Hu, K.X.; Liang, Y.C.; Lv, Y.Q. Deep ensemble learning with non-equivalent costs of fault severities for rolling bearing diagnostics. J. Manuf. Syst. 2021, 61, 249–264. [Google Scholar] [CrossRef]
- Gai, J.; Zhong, K.; Du, X.; Yan, K.; Shen, J. Detection of gear fault severity based on parameter-optimized deep belief network using sparrow search algorithm. Measurement 2021, 185, 110079. [Google Scholar] [CrossRef]
- Sun, Z.; Jin, H.; Xu, Y.; Li, K.; Gu, J.; Huang, Y.; Zheng, A.; Gao, X.; Shen, X. Severity-insensitive fault diagnosis method for heat pump systems based on improved benchmark model and data scaling strategy. Energy Build. 2022, 256, 111733. [Google Scholar] [CrossRef]
- Dibaj, A.; Ettefagh, M.M.; Hassannejad, R.; Ehghaghi, M.B. A hybrid fine-tuned VMD and CNN scheme for untrained compound fault diagnosis of rotating machinery with unequal-severity faults. Expert Syst. Appl. 2021, 167, 114094. [Google Scholar] [CrossRef]
- Wang, C.; Chen, J.; Zeng, R. An analysis and forecasts of online product sales based on BP Neural Network and Pearson Coefficient. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 27–29 June 2020; pp. 559–564. [Google Scholar]
- Chi, Y.W.; Yang, S.X.; Jiao, W.D. A Multi-label Fault Classification Method for Rolling Bearing Based on LSTM-RNN. J. Vib. Meas. Diagn. 2020, 40, 563–571. [Google Scholar]
- Kaleli, A.Y.; Firat Unal, A.; Ozer, S. Simultaneous Prediction of Remaining-Useful-Life and Failure-Likelihood with GRU-based Deep Networks for Predictive Maintenance Analysis. In Proceedings of the 2021 44th International Conference on Telecommunications and Signal Processing (TSP), Brno, Czech Republic, 26–28 July 2021; pp. 301–304. [Google Scholar]
- Zhang, L.P.; Bi, F.R.; Cheng, J.G.; Shen, P.F. Mechanical fault diagnosis method based on attention BiGRU. J. Vib. Shock 2021, 40, 113–118. [Google Scholar]
- Zhang, Y.; Tang, B.P.; Liu, Z.R.; Chen, R.X. Rotating machine fault feature extraction based on reduced time freuency representation. J. Vib. Shock 2015, 28, 156–163. [Google Scholar]
- Wu, C.Z.; Jia, J.D.; Jiang, S.P. Comparison of Engine Vibration Signal Time-Frequency Analyzing Methods. J. Mil. Transp. Univ. 2016, 18, 35–40. [Google Scholar]
- Lu, Y.; Peng, Z.M.; Yang, J.G. Experimental Research on Monitoring Wear of Piston Ring Based on Magnetoresistive Sensors Technology. Ship Ocean Eng. 2009, 38, 57–59. [Google Scholar]
- Peng, Z.M.; Lu, Y.; Yang, J.G. Review of Condition Monitoring Methods for Piston Ring of Marine Diesel Engine. Diesel Engine 2009, 31, 28–32. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type Label | Fault Type | Fault Severity | Fault Severity Label |
|---|---|---|---|
| 1 | Exhaust valve wear | 0.3 mm | 1-1 |
| 0.7 mm | 1-2 | ||
| 1.0 mm | 1-3 | ||
| 2 | Cylinder wear | 126.20 mm | 2-1 |
| 126.40 mm | 2-2 | ||
| 126.60 mm | 2-3 | ||
| 126.80 mm | 2-4 | ||
| 3 | Piston ring wear | 1.0 mm | 3-1 |
| 2.0 mm | 3-2 | ||
| 3.0 mm | 3-3 | ||
| 4 | Intake valve wear | 0.1 mm | 4-1 |
| 0.6 mm | 4-2 | ||
| 0.9 mm | 4-3 |
| Sensor Signal | Fault Label | 2-1 | 2-2 | 2-3 | 2-4 |
|---|---|---|---|---|---|
| Cylinder head surface vibration signal | 2-1 | 1 | −0.147432 | −0.054711 | −0.157429 |
| 2-2 | −0.147432 | 1 | 0.06385 | −0.137345 | |
| 2-3 | −0.054711 | 0.06385 | 1 | −0.147416 | |
| 2-4 | −0.157429 | −0.137345 | −0.147416 | 1 | |
| Fuselage surface vibration signal | 2-1 | 1 | −0.015744 | −0.001972 | 0.013253 |
| 2-2 | −0.015744 | 1 | 0.003264 | 0.006259 | |
| 2-3 | −0.001972 | 0.003264 | 1 | −0.001006 | |
| 2-4 | 0.013253 | 0.006259 | −0.001006 | 1 | |
| Fuselage bottom vibration signal | 2-1 | 1 | −0.005371 | −0.018656 | 0.008554 |
| 2-2 | −0.005371 | 1 | 0.001913 | −0.046587 | |
| 2-3 | −0.018656 | 0.001913 | 1 | −0.012417 | |
| 2-4 | 0.008554 | −0.046587 | −0.012417 | 1 |
| Name | Formula | Name | Formula |
|---|---|---|---|
| Mean value | Waveform factor | ||
| Peak value | Peak factor | ||
| Root mean square | Skewness | ||
| Peak–peak value | Kurtosis | ||
| Average amplitude | Kurtosis factor | ||
| Mean square | Pulse factor | ||
| Root mean square | Margin factor | ||
| Variance | Skewness factor | ||
| Standard deviation | Coefficient of variation |
| Structure | Input | Output | Memory Numbers | Learning Rate | Activation Function |
|---|---|---|---|---|---|
| Input | (128, 1) | (128, 1) | |||
| GRU | (128, 1) | (128, 128) | 128 | Tanh | |
| Dropout | (128, 128) | (128, 128) | 0.5 | ||
| GRU | (128, 128) | (128, 64) | 64 | Tanh | |
| Dropout | (128, 64) | (128, 64) | 0.5 | ||
| GRU | (128, 64) | (32, 1) | 32 | Tanh | |
| Dense | (32, 1) | (4, 1) | Softmax |
| Structure | Input | Output | Memory Numbers | Learning Rate | Activation Function |
|---|---|---|---|---|---|
| Input | (128, 3) | (128, 3) | |||
| GRU | (128, 3) | (128, 128) | 128 | Tanh | |
| Dropout | (128, 128) | (128, 128) | 0.5 | ||
| GRU | (128, 128) | (128, 64) | 64 | Tanh | |
| Dropout | (128, 64) | (128, 64) | 0.5 | ||
| GRU | (128, 64) | (32, 1) | 32 | Tanh | |
| Dense | (32, 1) | (13, 1) | Softmax |
| Dropout Rate | Average Test Accuracy | Average Verification Accuracy |
|---|---|---|
| 0.2 | 99.97% | 100.00% |
| 0.3 | 98.35% | 99.86% |
| 0.4 | 98.69% | 100.00% |
| 0.5 | 99.86% | 100.00% |
| Number | Average Test Accuracy | Average Verification Accuracy |
|---|---|---|
| 1 | 99.45% | 99.62% |
| 2 | 99.18% | 99.74% |
| 3 | 99.97% | 100.00% |
| Methods | Average Test Accuracy | Average Verification Accuracy |
|---|---|---|
| PCA | 53.36% | 53.65% |
| CNN | 51.31% | 59.44% |
| The proposed method | 99.97% | 100.00% |
| Networks | Average Test Accuracy | Average Verification Accuracy |
|---|---|---|
| LSTM | 90.21% | 95.06% |
| RNN | 18.59% | 27.51% |
| GRU | 99.97% | 100.00% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Peng, Z.; Liu, R.; Chen, C. Research on Multi-Fault Diagnosis Method Based on Time Domain Features of Vibration Signals. Sensors 2022, 22, 8164. https://doi.org/10.3390/s22218164
Wang C, Peng Z, Liu R, Chen C. Research on Multi-Fault Diagnosis Method Based on Time Domain Features of Vibration Signals. Sensors. 2022; 22(21):8164. https://doi.org/10.3390/s22218164
Chicago/Turabian StyleWang, Chao, Zhangming Peng, Rong Liu, and Chang Chen. 2022. "Research on Multi-Fault Diagnosis Method Based on Time Domain Features of Vibration Signals" Sensors 22, no. 21: 8164. https://doi.org/10.3390/s22218164
APA StyleWang, C., Peng, Z., Liu, R., & Chen, C. (2022). Research on Multi-Fault Diagnosis Method Based on Time Domain Features of Vibration Signals. Sensors, 22(21), 8164. https://doi.org/10.3390/s22218164