
Acoustic Forward Model for Guided Wave Propagation and Scattering in a Pipe Bend


Abstract
:1. Introduction
2. Forward Model
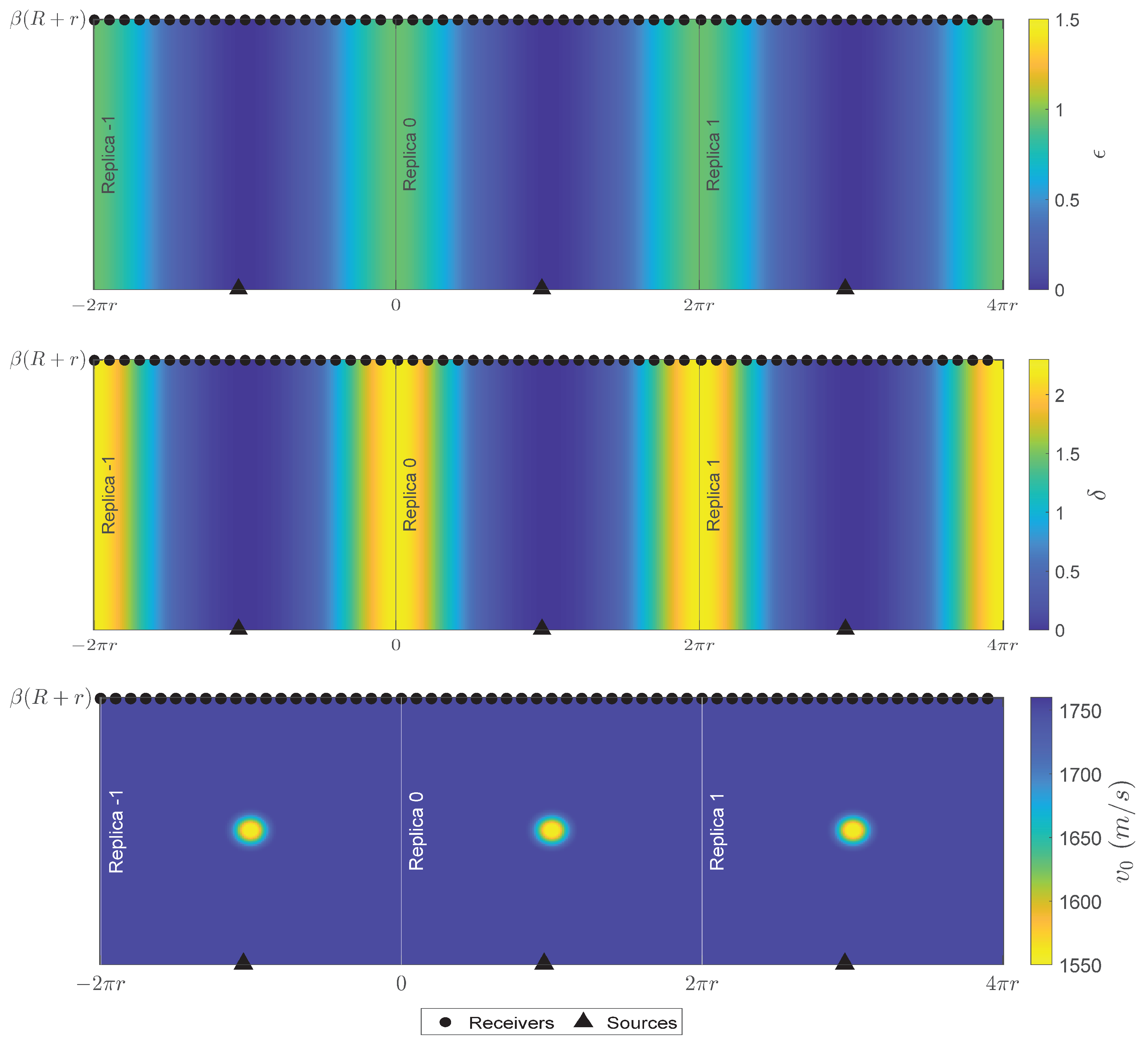
2.1. Orthogonal Parameterization
2.2. Acoustic Wave Equation
2.3. Implementation for a Pipe Bend
3. Numerical Methods
3.1. Configuration of the Problem
3.2. FE Modeling
3.3. Acoustic Modeling
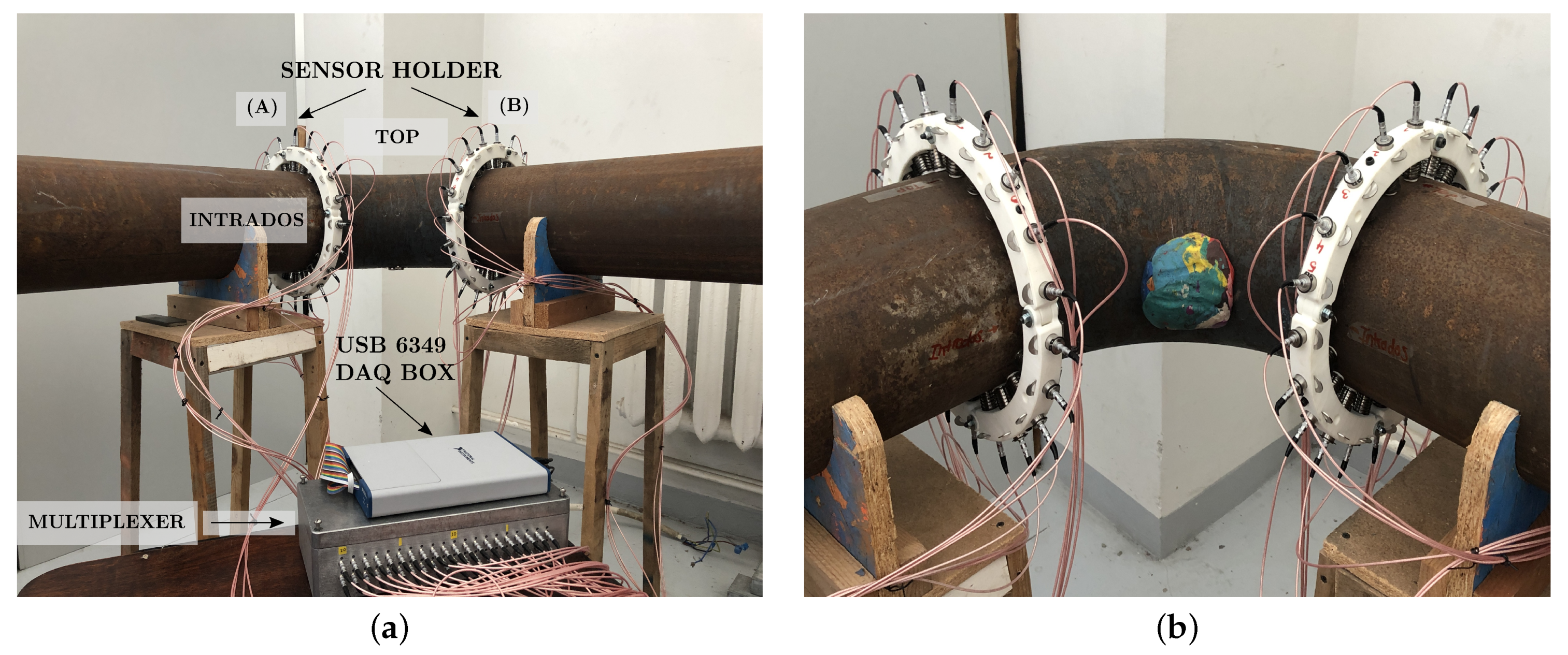
4. Experimental Measurements
5. Results and Discussion
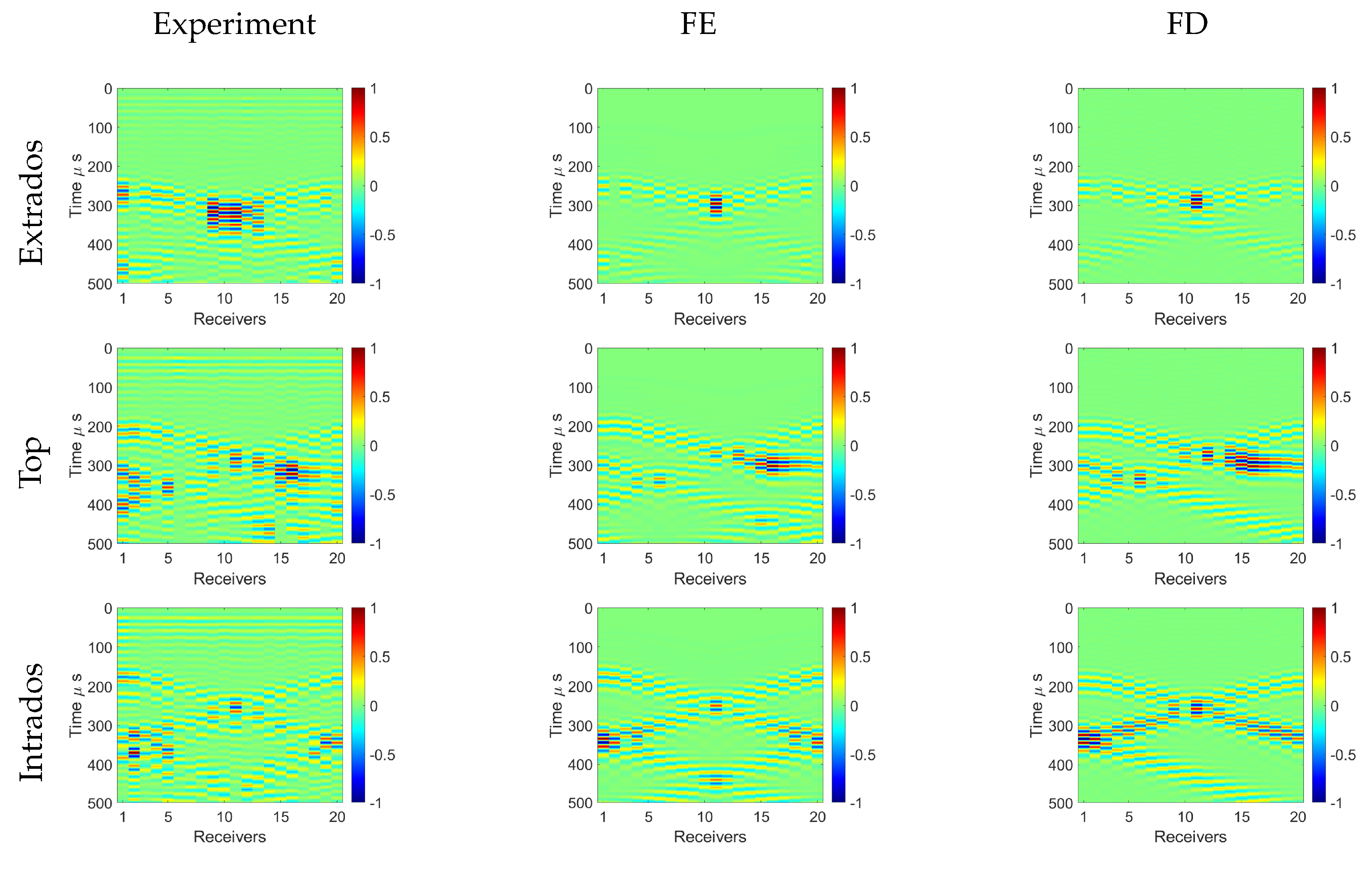
5.1. Guided Wave Propagation in the Pipe Bend
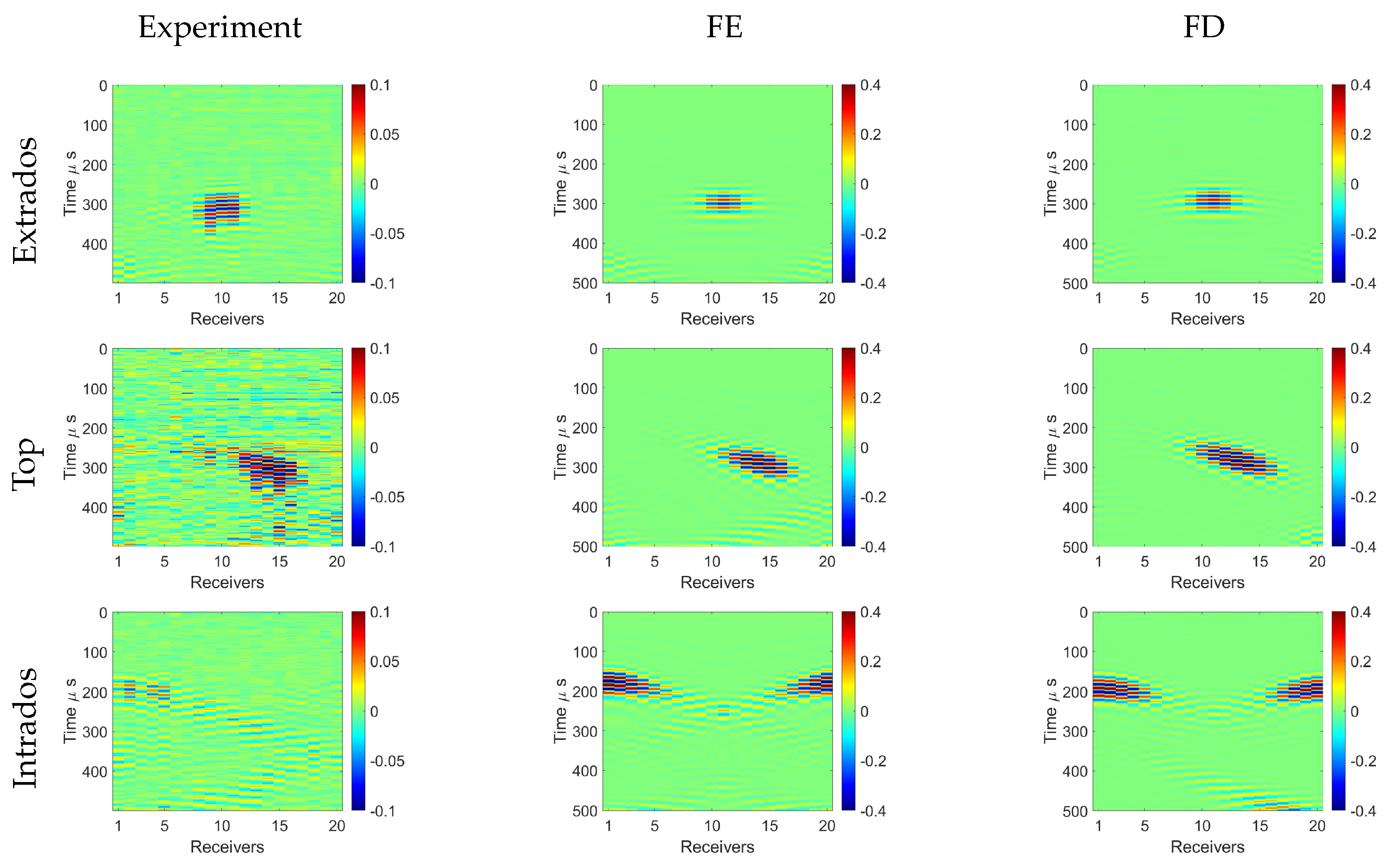
5.2. Scattered Wave Fields in the Pipe Bend
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Talebi, M.; Zeinoddini, M.; Mo’tamedi, M.; Zandi, A. Collapse of HSLA steel pipes under corrosion exposure and uniaxial inelastic cycling. J. Constr. Steel Res. 2018, 144, 253–269. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, L.; Zhang, P.; Sun, W.; Yang, Z.; Liu, B.; Tian, J.; Shu, X.; He, Y.; Liu, G. Failure analysis of Erosion-Corrosion of the bend pipe at sewage stripping units. Eng. Fail. Anal. 2021, 129, 105675. [Google Scholar] [CrossRef]
- Leak Blamed as Mexico Explosion Death Toll Rises. Available online: https://www.theguardian.com/world/2016/apr/22/leak-blamed-as-mexico-explosion-death-toll-rises (accessed on 30 June 2021).
- Muthanna, B.G.N.; Amara, M.; Meliani, M.H.; Mettai, B.; Božić, Z.; Suleiman, R.; Sorour, A. Inspection of internal erosion-corrosion of elbow pipe in the desalination station. Eng. Fail. Anal. 2019, 102, 293–302. [Google Scholar] [CrossRef]
- Kusmono; Khasani. Analysis of a failed pipe elbow in geothermal production facility. Case Stud. Eng. Fail. Anal. 2017, 9, 71–77. [Google Scholar] [CrossRef]
- Lebowitz, C.A.; Brown, L.M. Measurement of Pipe Thickness. In Review of Progress in Quantitative Nondestructive Evaluation: Volumes 12A and 12B; Springer: Boston, MA, USA, 1993; pp. 1987–1994. [Google Scholar] [CrossRef] [Green Version]
- Dwivedi, S.K.; Vishwakarma, M.; Soni, P.A. Advances and Researches on Non Destructive Testing: A Review. Mater. Today Proc. 2018, 5, 3690–3698. [Google Scholar] [CrossRef]
- Mishra, D.; Agrawal, K.K.; Abbas, A.; Srivastava, R.; Yadav, R.S. PIG [Pipe Inspection Gauge]: An Artificial Dustman for Cross Country Pipelines. Procedia Comput. Sci. 2019, 152, 333–340. [Google Scholar] [CrossRef]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Guan, R.; Lu, Y.; Duan, W.; Wang, X. Guided waves for damage identification in pipeline structures: A review. Struct. Control. Health Monit. 2017, 24, e2007. [Google Scholar] [CrossRef]
- Su, Z.; Ye, L.; Lu, Y. Guided Lamb waves for identification of damage in composite structures: A review. J. Sound Vib. 2006, 295, 753–780. [Google Scholar] [CrossRef]
- Alleyne, D.; Cawley, P. Long range propagation of Lamb waves in chemical plant pipework. Mater. Eval. 1997, 55, 504–508. [Google Scholar]
- Ghavamian, A.; Mustapha, F.; Baharudin, B.; Yidris, N. Detection, Localisation and Assessment of Defects in Pipes Using Guided Wave Techniques: A Review. Sensors 2018, 18, 4470. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vogt, T.; Heinlein, S.; Milewczyk, J.; Mariani, S.; Jones, R.; Cawley, P. Guided Wave Monitoring of Industrial Pipework—Improved Sensitivity System and Field Experience. In European Workshop on Structural Health Monitoring; Springer International Publishing: Berlin/Heidelberg, Germany, 2021; pp. 819–829. [Google Scholar]
- Lowe, P.S.; Sanderson, R.; Pedram, S.K.; Boulgouris, N.V.; Mudge, P. Inspection of Pipelines Using the First Longitudinal Guided Wave Mode. Phys. Procedia 2015, 70, 338–342. [Google Scholar] [CrossRef] [Green Version]
- Yan, S.; Zhang, B.; Song, G.; Lin, J. PZT-Based Ultrasonic Guided Wave Frequency Dispersion Characteristics of Tubular Structures for Different Interfacial Boundaries. Sensors 2018, 18, 4111. [Google Scholar] [CrossRef] [Green Version]
- Song, Z.; Qi, X.; Liu, Z.; Ma, H. Experimental study of guided wave propagation and damage detection in large diameter pipe filled by different fluids. NDT E Int. 2018, 93, 78–85. [Google Scholar] [CrossRef]
- Olisa, S.C.; Khan, M.A.; Starr, A. Review of Current Guided Wave Ultrasonic Testing (GWUT) Limitations and Future Directions. Sensors 2021, 21, 811. [Google Scholar] [CrossRef]
- Heinlein, S.; Cawley, P.; Vogt, T. Validation of a procedure for the evaluation of the performance of an installed structural health monitoring system. Struct. Health Monit. 2019, 18, 1557–1568. [Google Scholar] [CrossRef] [Green Version]
- Rose, J.L.; Zhang, L.; Avioli, M.J.; Mudge, P.J. A Natural Focusing Low Frequency Guided Wave Experiment for the Detection of Defects Beyond Elbows. J. Press. Vessel. Technol. 2005, 127, 310–316. [Google Scholar] [CrossRef]
- Demma, A.; Cawley, P.; Lowe, M.; Pavlakovic, B. The Effect of Bends on the Propagation of Guided Waves in Pipes. J. Press. Vessel. Technol. 2005, 127, 328–335. [Google Scholar] [CrossRef]
- Hayashi, T.; Kawashima, K.; Sun, Z.; Rose, J.L. Guided Wave Propagation Mechanics Across a Pipe Elbow. J. Press. Vessel. Technol. 2005, 127, 322–327. [Google Scholar] [CrossRef]
- Rudd, K.E.; Leonard, K.R.; Bingham, J.P.; Hinders, M.K. Simulation of guided waves in complex piping geometries using the elastodynamic finite integration technique. J. Acoust. Soc. Am. 2007, 121, 1449–1458. [Google Scholar] [CrossRef]
- Sanderson, R.M.; Hutchins, D.A.; Billson, D.R.; Mudge, P.J. The investigation of guided wave propagation around a pipe bend using an analytical modeling approach. J. Acoust. Soc. Am. 2013, 133, 1404–1414. [Google Scholar] [CrossRef]
- Heinlein, S.; Cawley, P.; Vogt, T. Reflection of torsional T(0,1) guided waves from defects in pipe bends. NDT E Int. 2018, 93, 57–63. [Google Scholar] [CrossRef]
- Xu, Z.D.; Zhu, C.; Shao, L.W. Damage Identification of Pipeline Based on Ultrasonic Guided Wave and Wavelet Denoising. J. Pipeline Syst. Eng. Pract. 2021, 12, 04021051. [Google Scholar] [CrossRef]
- Jansen, D.; Hutchins, D. Lamb wave tomography. In IEEE Symposium on Ultrasonics; IEEE: New York, NY, USA, 1990; Volume 2, pp. 1017–1020. [Google Scholar] [CrossRef]
- Huthwaite, P. Evaluation of inversion approaches for guided wave thickness mapping. Proc. R. Soc. A Math. Phys. Eng. Sci. 2014, 470, 20140063. [Google Scholar] [CrossRef] [Green Version]
- Rohde, A.H.; Veidt, M.; Rose, L.R.F.; Homer, J. A computer simulation study of imaging flexural inhomogeneities using plate-wave diffraction tomography. Ultrasonics 2008, 48, 6–15. [Google Scholar] [CrossRef]
- Huthwaite, P.; Simonetti, F. High-resolution guided wave tomography. Wave Motion 2013, 50, 979–993. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Fan, Z. Guided Wave Tomography Based on Full Waveform Inversion. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2016, 63, 737–745. [Google Scholar] [CrossRef]
- Lin, M.; Wilkins, C.; Rao, J.; Fan, Z.; Liu, Y. Corrosion detection with ray-based and full-waveform guided wave tomography. In Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, Civil Infrastructure, and Transportation XIV; SPIE: Bellingham, WA, USA, 2020; Volume 11380, pp. 102–109. [Google Scholar] [CrossRef]
- Volker, A.; Mast, A.; Bloom, J. Experimental results of guided wave travel time tomography. AIP Conf. Proc. 2010, 1211, 2052–2059. [Google Scholar] [CrossRef]
- Willey, C.L.; Simonetti, F.; Nagy, P.B.; Instanes, G. Guided wave tomography of pipes with high-order helical modes. NDT E Int. 2014, 65, 8–21. [Google Scholar] [CrossRef]
- Huthwaite, P.; Ribichini, R.; Cawley, P.; Lowe, M.J. Mode selection for corrosion detection in pipes and vessels via guided wave tomography. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2013, 60, 1165–1177. [Google Scholar] [CrossRef]
- Volker, A.; van Zon, T. Guided wave travel time tomography for bends. AIP Conf. Proc. 2013, 1511, 737–744. [Google Scholar] [CrossRef]
- Brath, A.J.; Simonetti, F.; Nagy, P.B.; Instanes, G. Acoustic formulation of elastic guided wave propagation and scattering in curved tubular structures. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2014, 61, 815–829. [Google Scholar] [CrossRef] [PubMed]
- Brath, A.J.; Simonetti, F.; Nagy, P.B.; Instanes, G. Guided Wave Tomography of Pipe Bends. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2017, 64, 847–858. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Li, X. Elbow Damage Identification Technique Based on Sparse Inversion Image Reconstruction. Materials 2020, 13, 1786. [Google Scholar] [CrossRef] [Green Version]
- Belanger, P.; Cawley, P. Feasibility of low frequency straight-ray guided wave tomography. NDT E Int. 2009, 42, 113–119. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Fan, Z. Investigation of the reconstruction accuracy of guided wave tomography using full waveform inversion. J. Sound Vib. 2017, 400, 317–328. [Google Scholar] [CrossRef]
- Ratassepp, M.; Rao, J.; Yu, X.; Fan, Z. Modeling the Effect of Anisotropy in Ultrasonic Guided Wave Tomography. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2022, 69, 330–339. [Google Scholar] [CrossRef]
- Alkhalifah, T. An acoustic wave equation for anisotropic media. Geophysics 2000, 65, 1239–1250. [Google Scholar] [CrossRef]
- Thomsen, L. Weak elastic anisotropy. Geophysics 1986, 50, 1954–1966. [Google Scholar] [CrossRef]
- ABAQUS/Standard User’s Manual, version 6.14; Dassault Systèmes Simulia Corp.: Providence, RI, USA, 2014.
- Drozdz, M.; Moreau, L.; Castaings, M.; Lowe, M.J.S.; Cawley, P. Efficient Numerical Modelling of Absorbing Regions for Boundaries Of Guided Waves Problems. AIP Conf. Proc. 2006, 820, 126–133. [Google Scholar] [CrossRef]
- Operto, S.; Virieux, J.; Ribodetti, A.; Anderson, J.E. Finite-difference frequency-domain modeling of viscoacoustic wave propagation in 2D tilted transversely isotropic (TTI) media. Geophysics 2009, 74, T75–T95. [Google Scholar] [CrossRef] [Green Version]
- Métivier, L.; Brossier, R. The SEISCOPE optimization toolbox: A large-scale nonlinear optimization library based on reverse communication. Geophysics 2016, 81, F1–F15. [Google Scholar] [CrossRef]
- Bitter, R.; Mohiuddin, T.; Nawrocki, M. LabVIEW: Advanced Programming Techniques; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (kg/m3) | E | |
|---|---|---|
| 7932 | 216.9 | 0.2865 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rasgado-Moreno, C.-O.; Rist, M.; Land, R.; Ratassepp, M. Acoustic Forward Model for Guided Wave Propagation and Scattering in a Pipe Bend. Sensors 2022, 22, 486. https://doi.org/10.3390/s22020486
Rasgado-Moreno C-O, Rist M, Land R, Ratassepp M. Acoustic Forward Model for Guided Wave Propagation and Scattering in a Pipe Bend. Sensors. 2022; 22(2):486. https://doi.org/10.3390/s22020486
Chicago/Turabian StyleRasgado-Moreno, Carlos-Omar, Marek Rist, Raul Land, and Madis Ratassepp. 2022. "Acoustic Forward Model for Guided Wave Propagation and Scattering in a Pipe Bend" Sensors 22, no. 2: 486. https://doi.org/10.3390/s22020486
APA StyleRasgado-Moreno, C.-O., Rist, M., Land, R., & Ratassepp, M. (2022). Acoustic Forward Model for Guided Wave Propagation and Scattering in a Pipe Bend. Sensors, 22(2), 486. https://doi.org/10.3390/s22020486