Multi-Objective Optimal Planning for Distribution Network Considering the Uncertainty of PV Power and Line-Switch State


Abstract
:1. Introduction
2. Model of PV Power Uncertainty
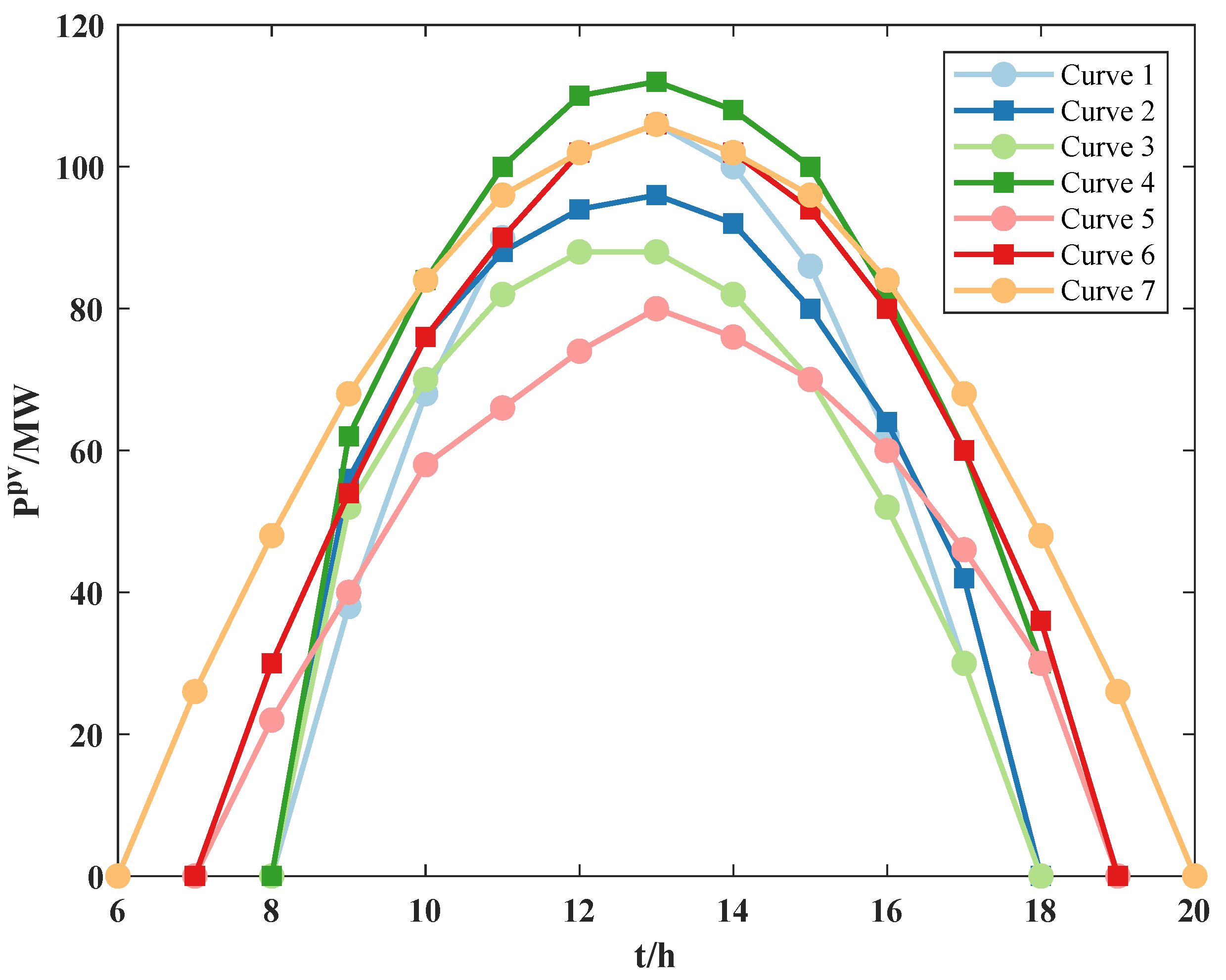
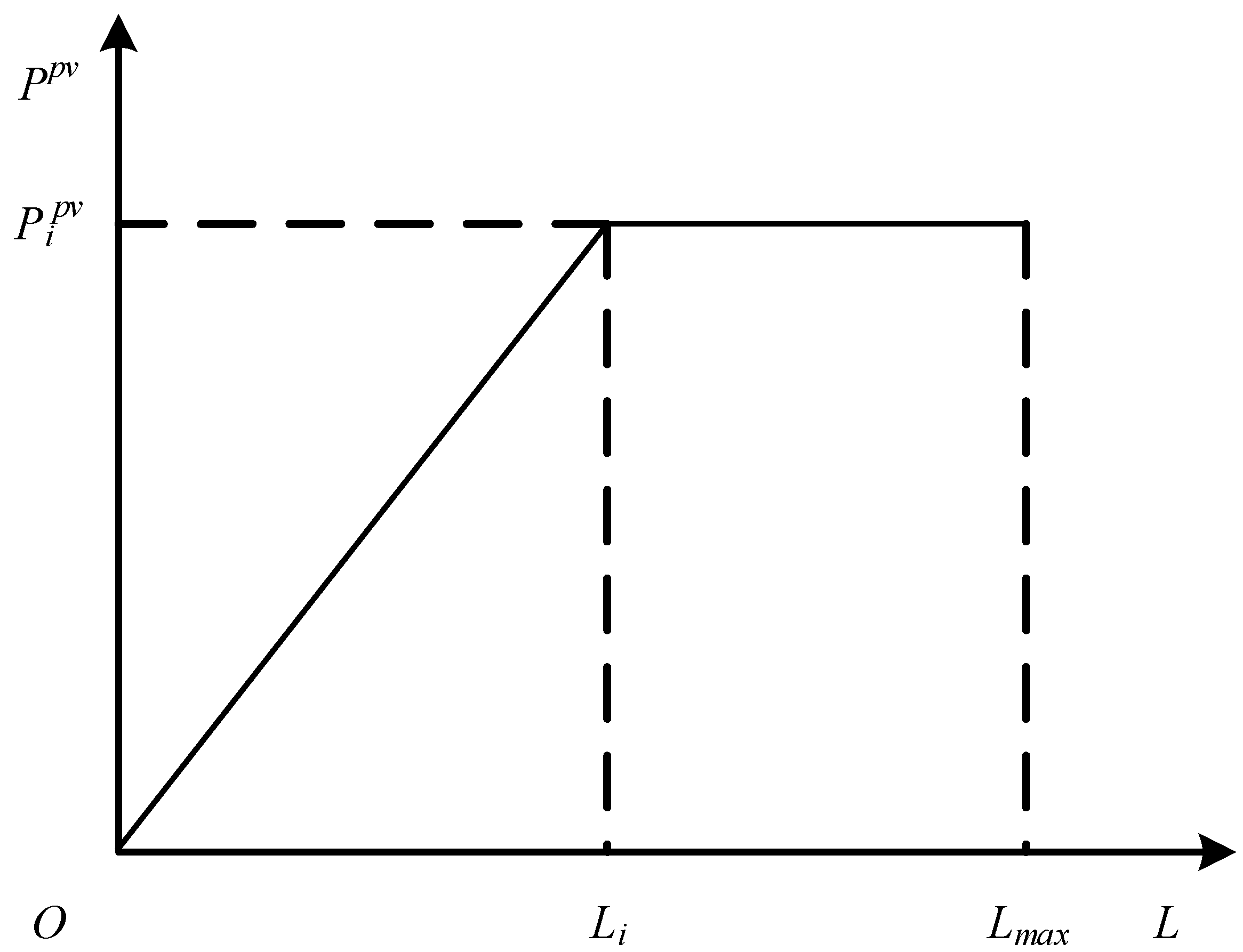
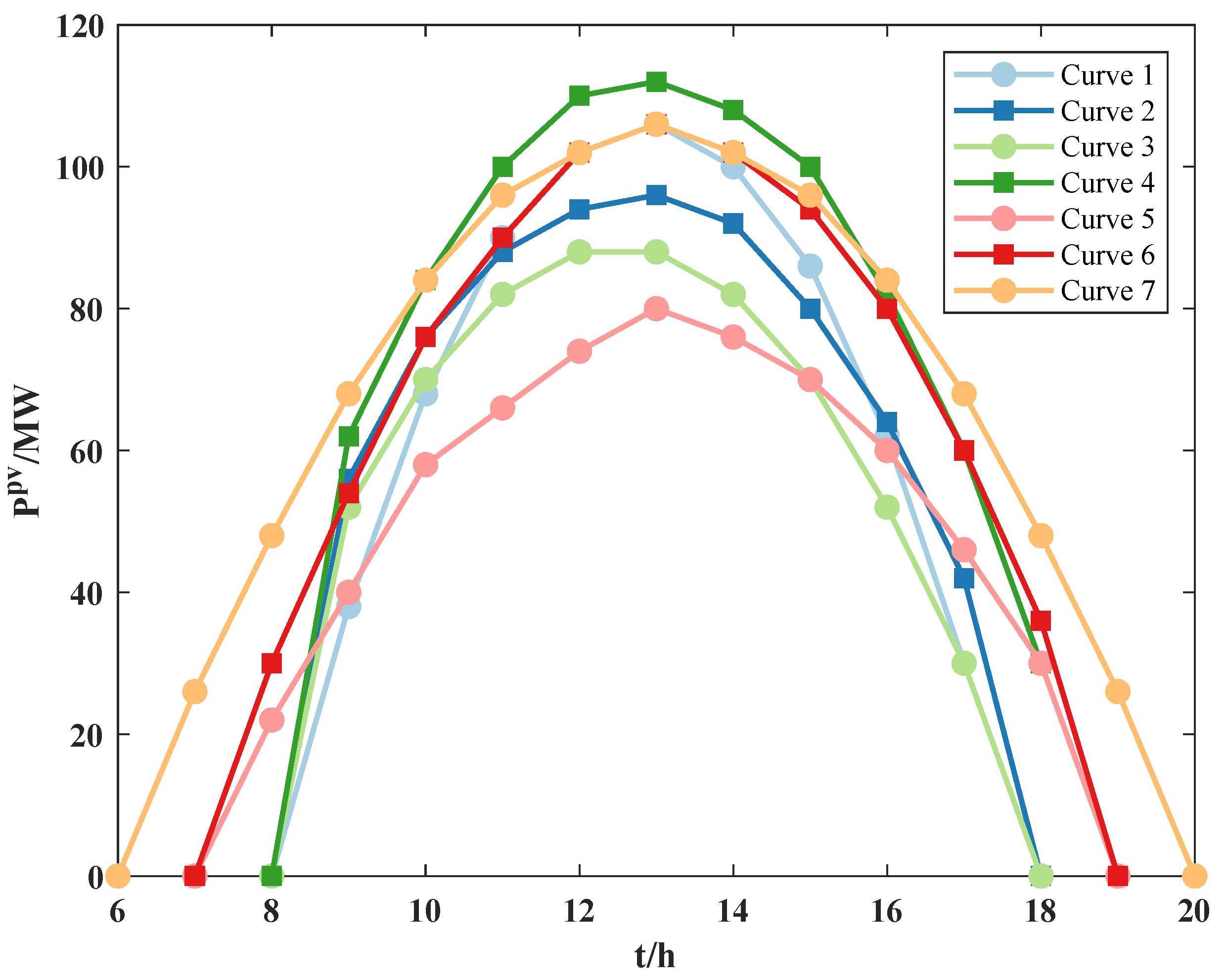
2.1. The Model of PV Power
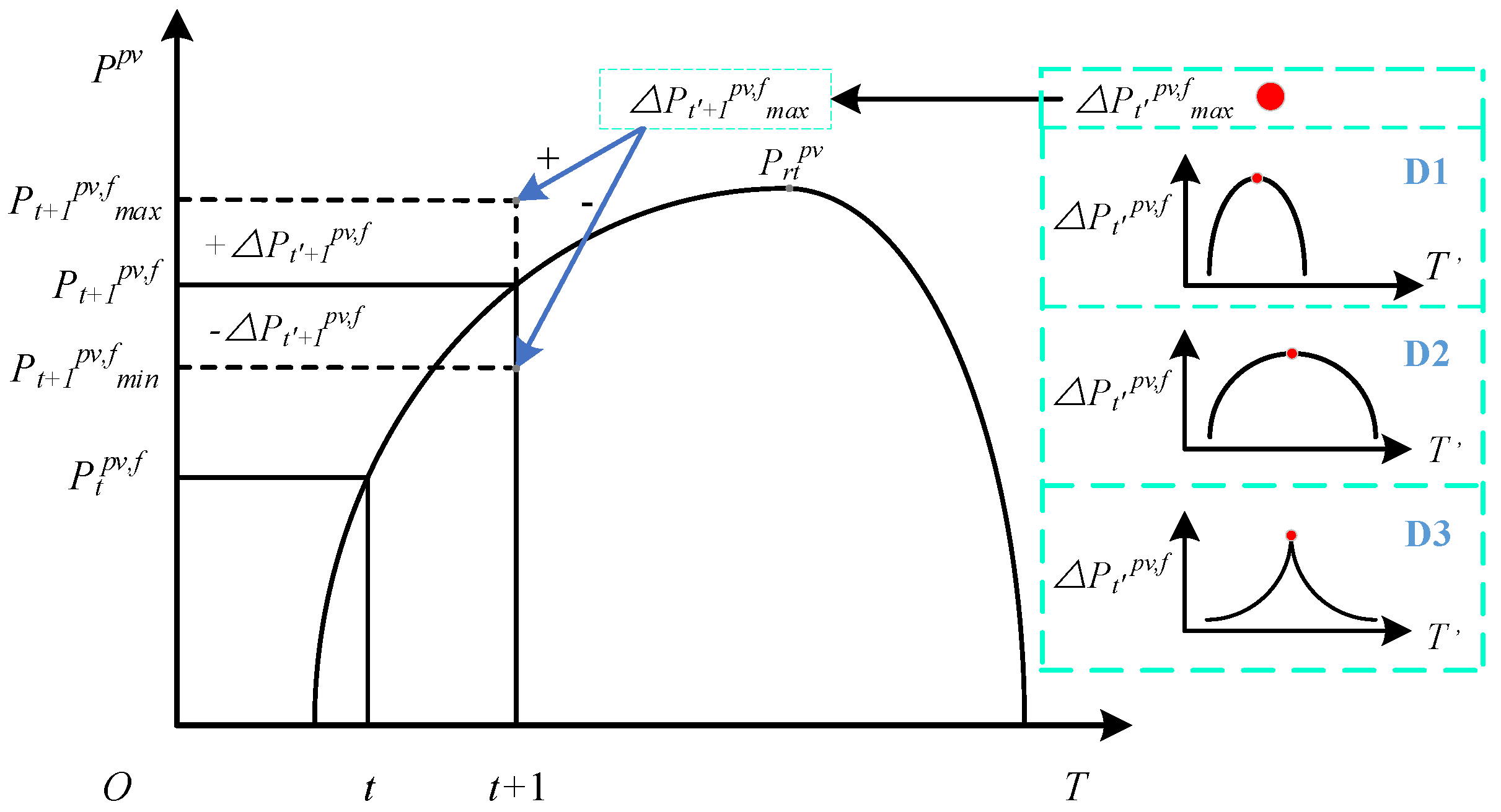
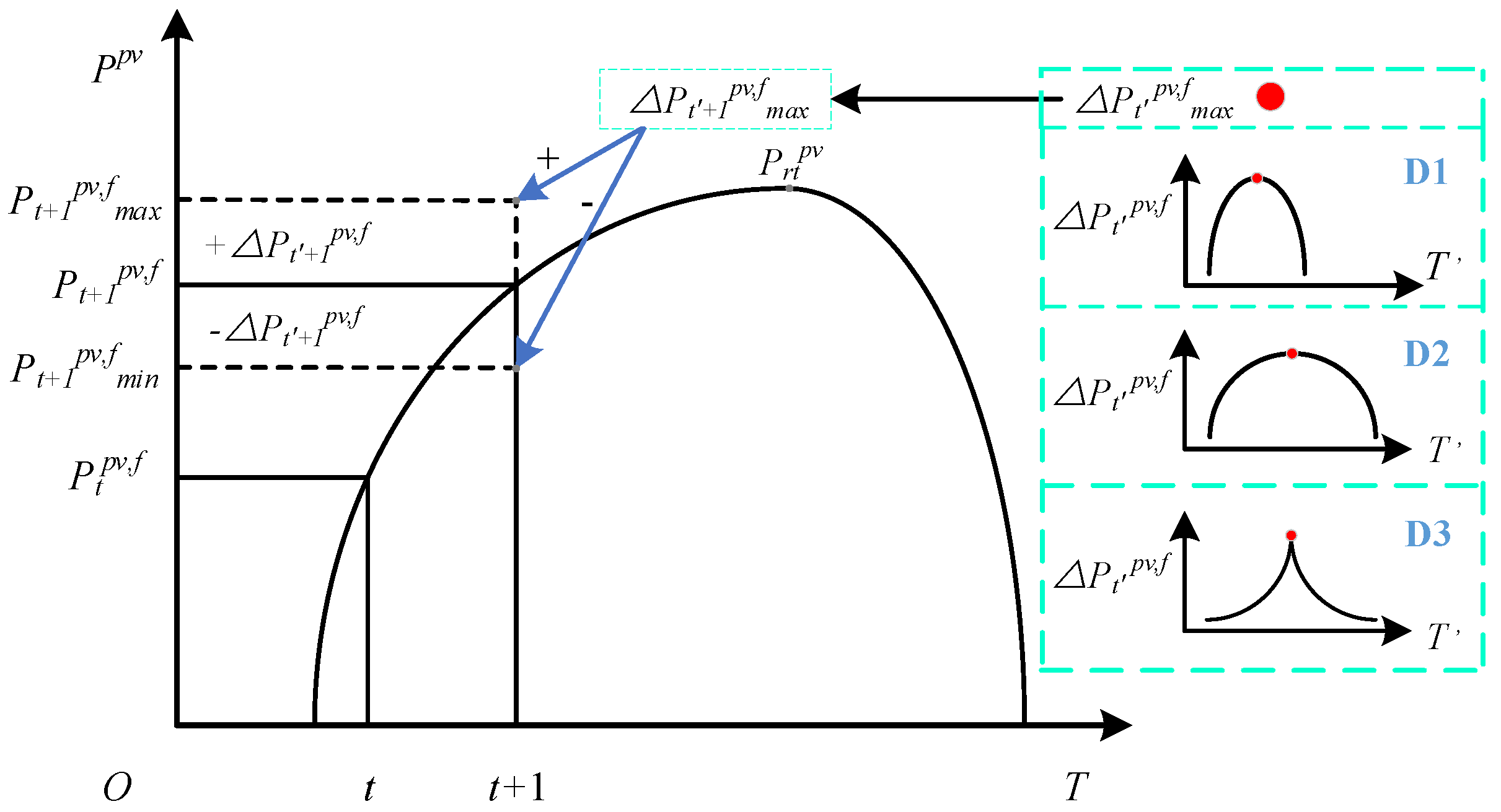
2.2. The Model of PV Power Error
3. Model of Line-Switch State Uncertainty
3.1. The Physical Equipment Failure
3.2. The Communication Transmission Failure
3.3. The Scheduling Control Failure
4. The Model
4.1. The Proposed Model
4.1.1. The Objective Function
4.1.2. The Power Flow Constraint
4.1.3. The PV Power Uncertainty Constraint
4.1.4. The Line-Switch State Uncertainty Constraint
4.1.5. The Line State Constraints
4.1.6. The Voltage and Power Constraints
4.1.7. The Islanding Constraint
4.2. Solution Algorithm
5. Numerical Results
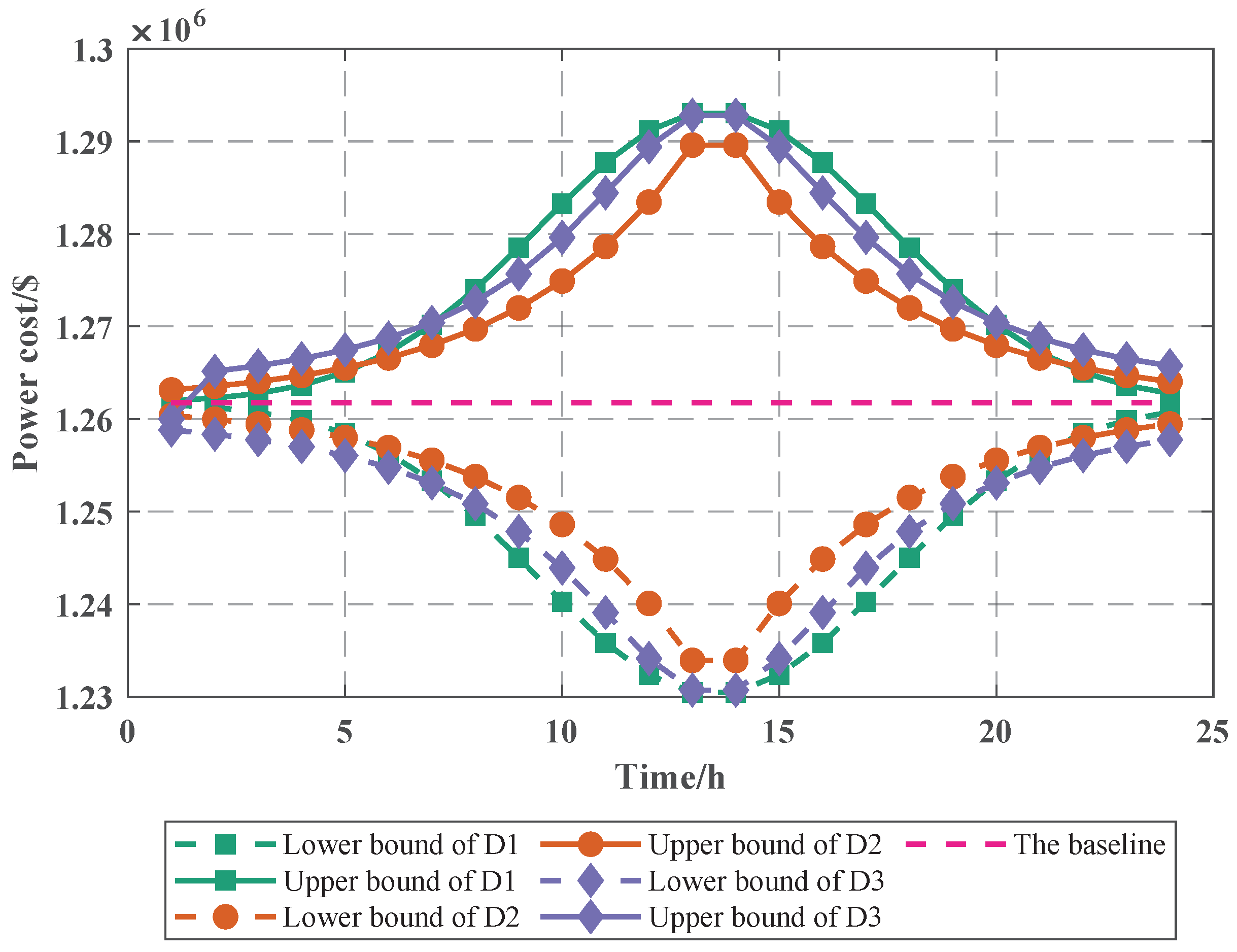
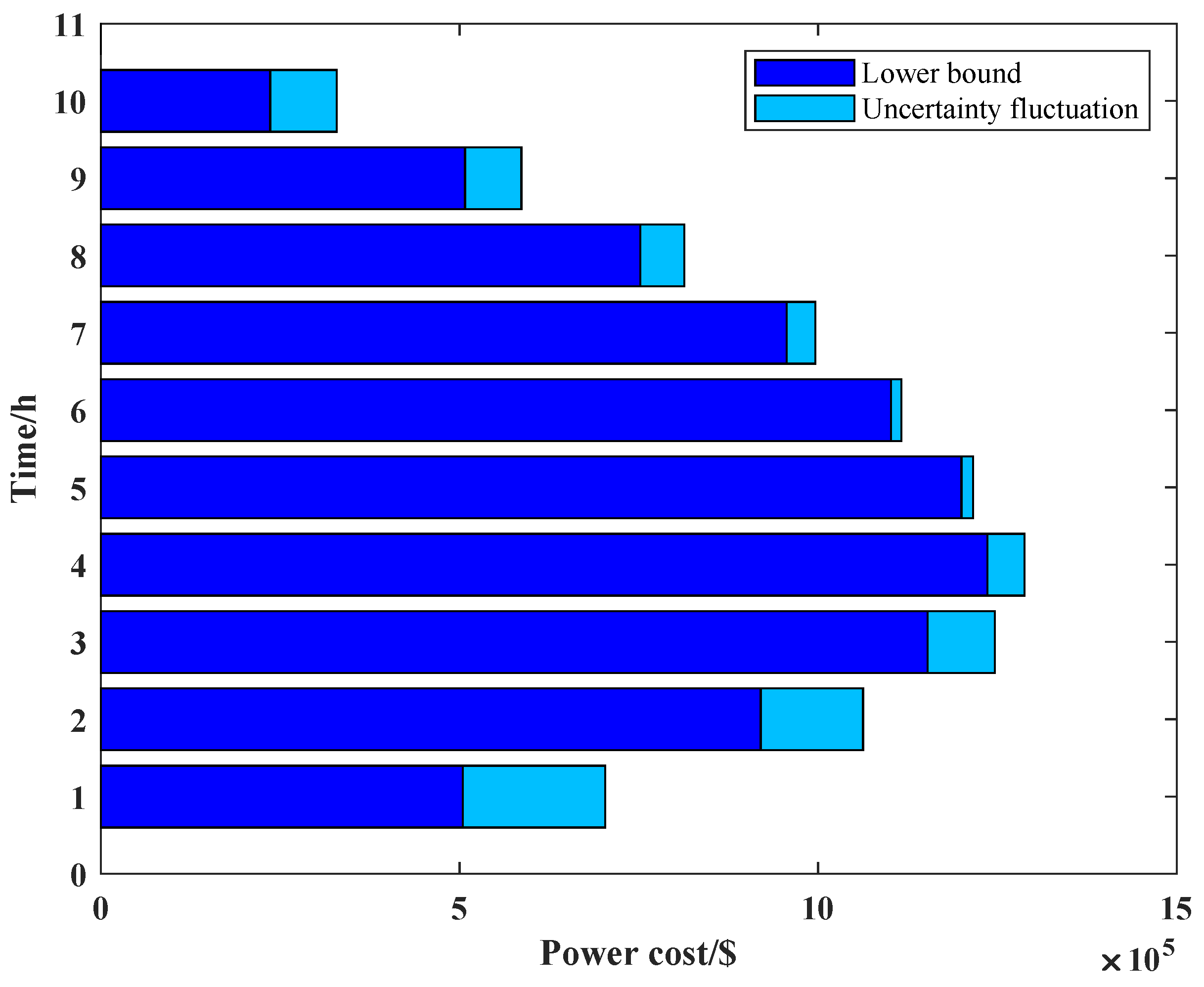
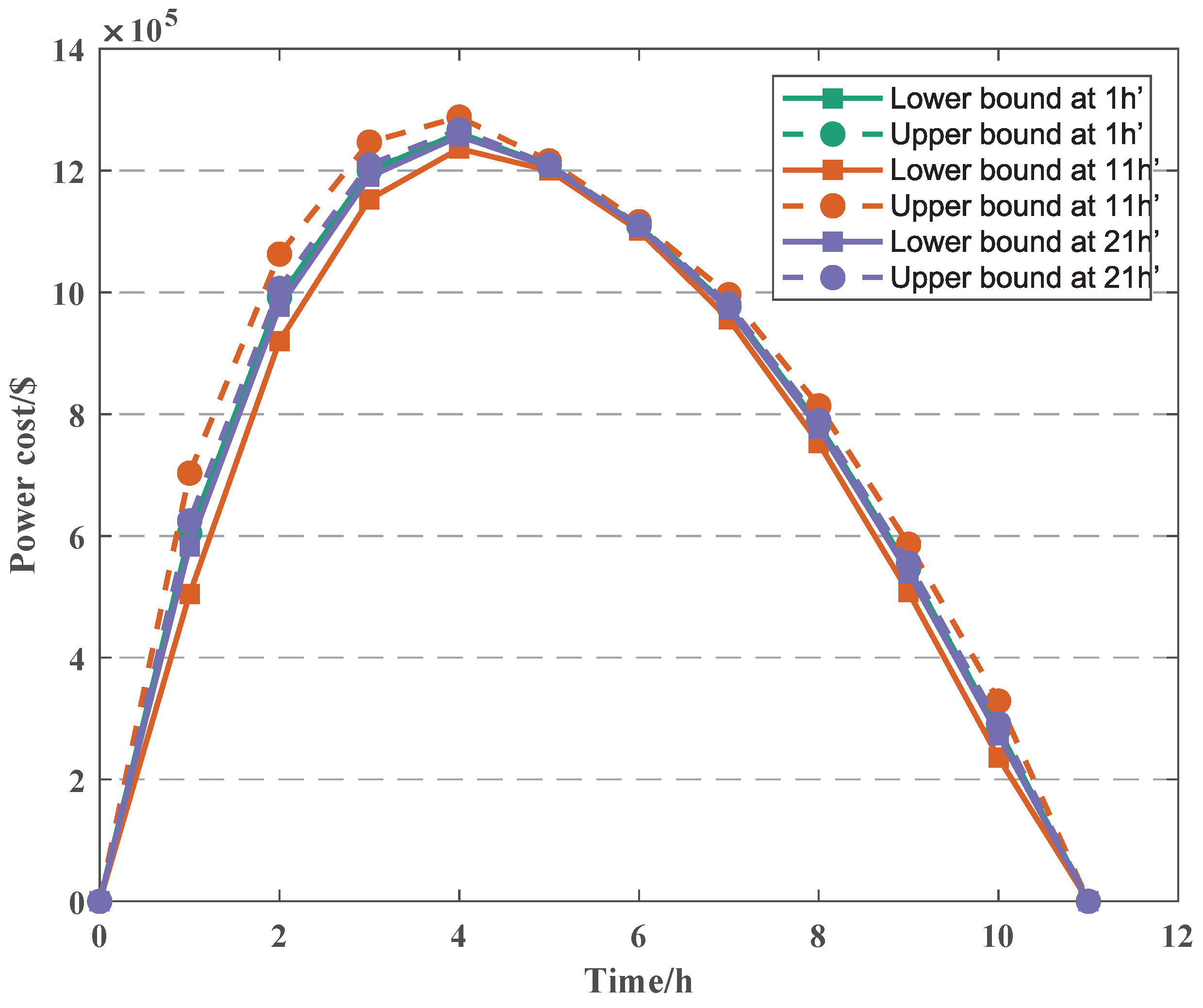
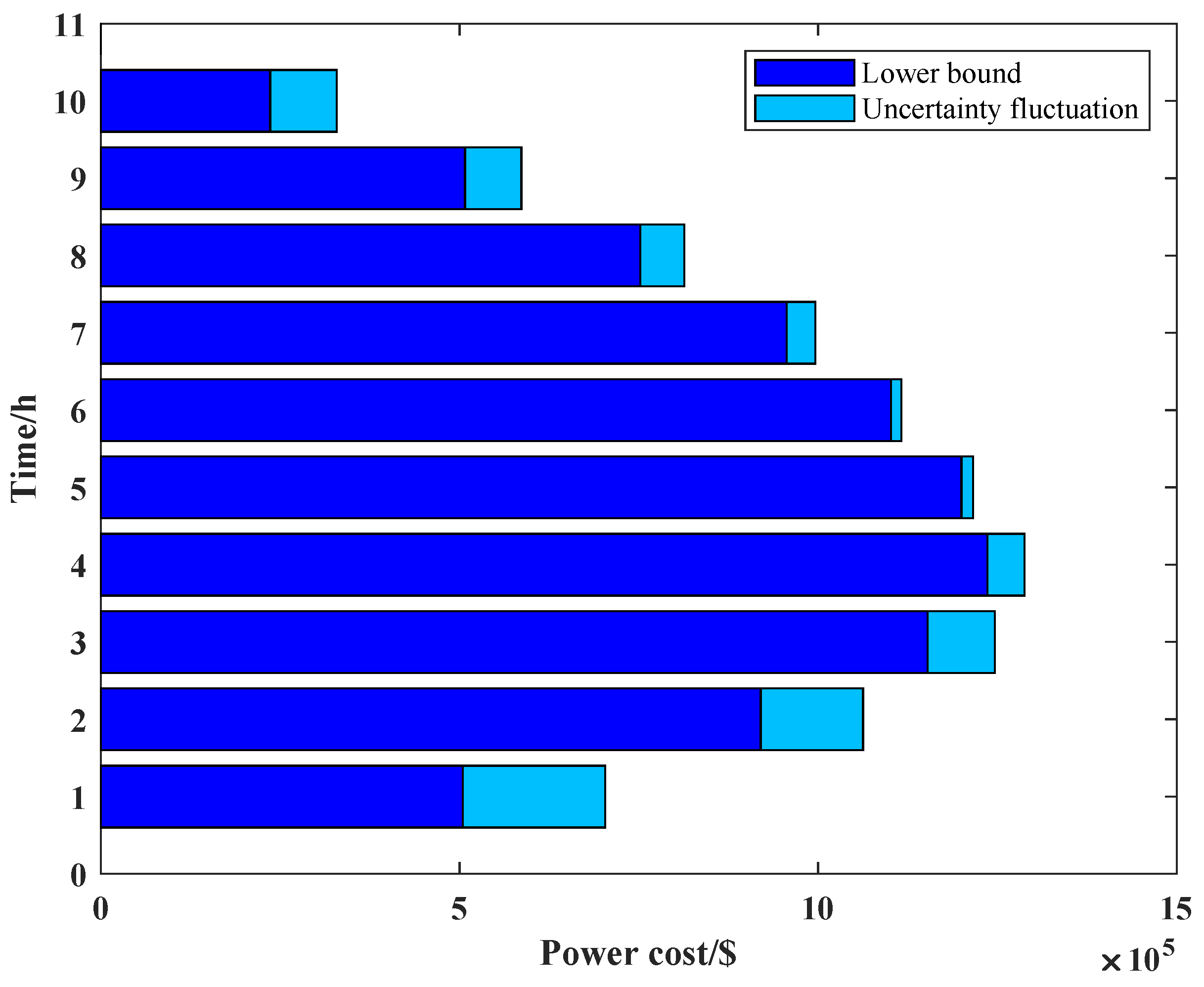
5.1. The Output Cost of PV
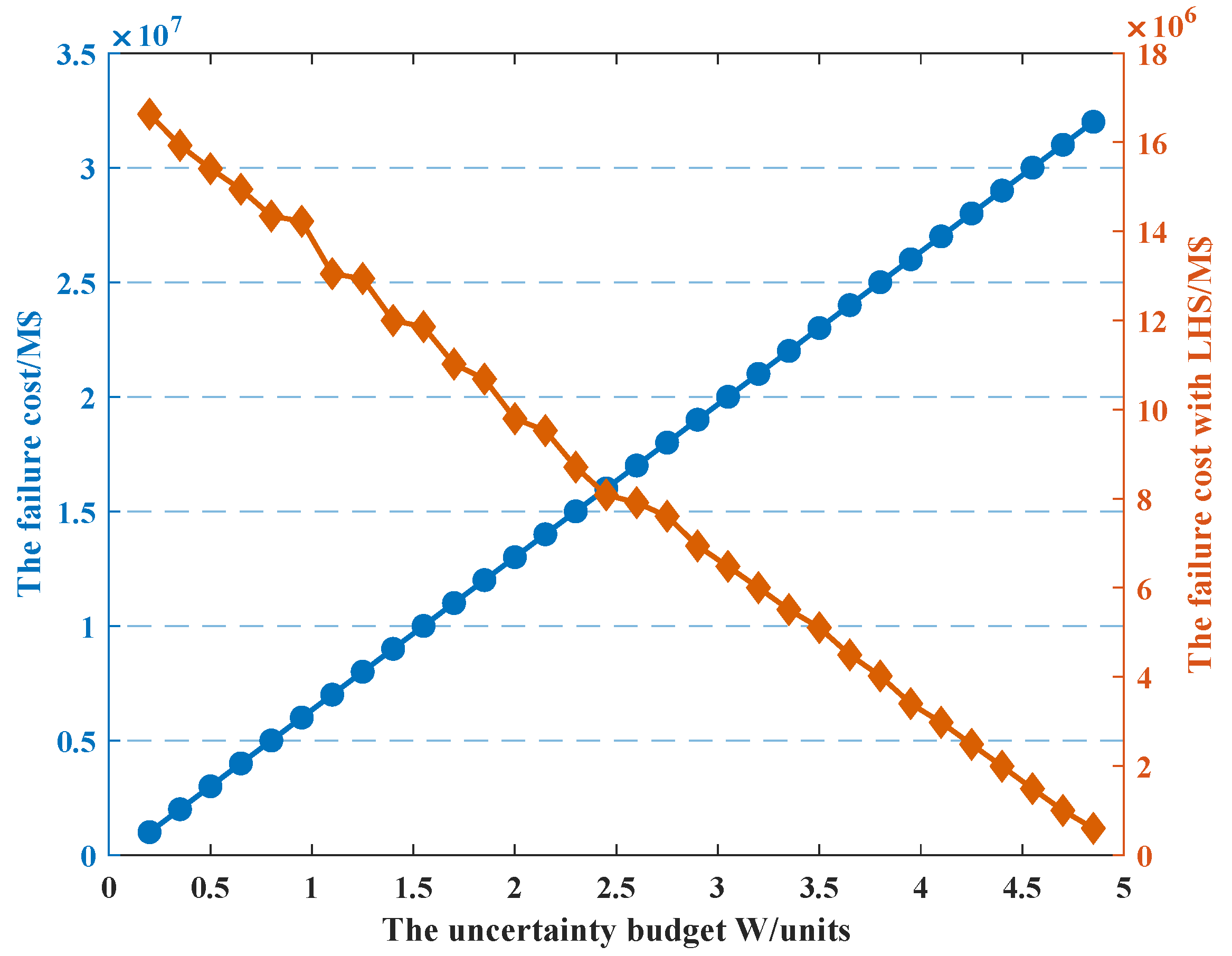
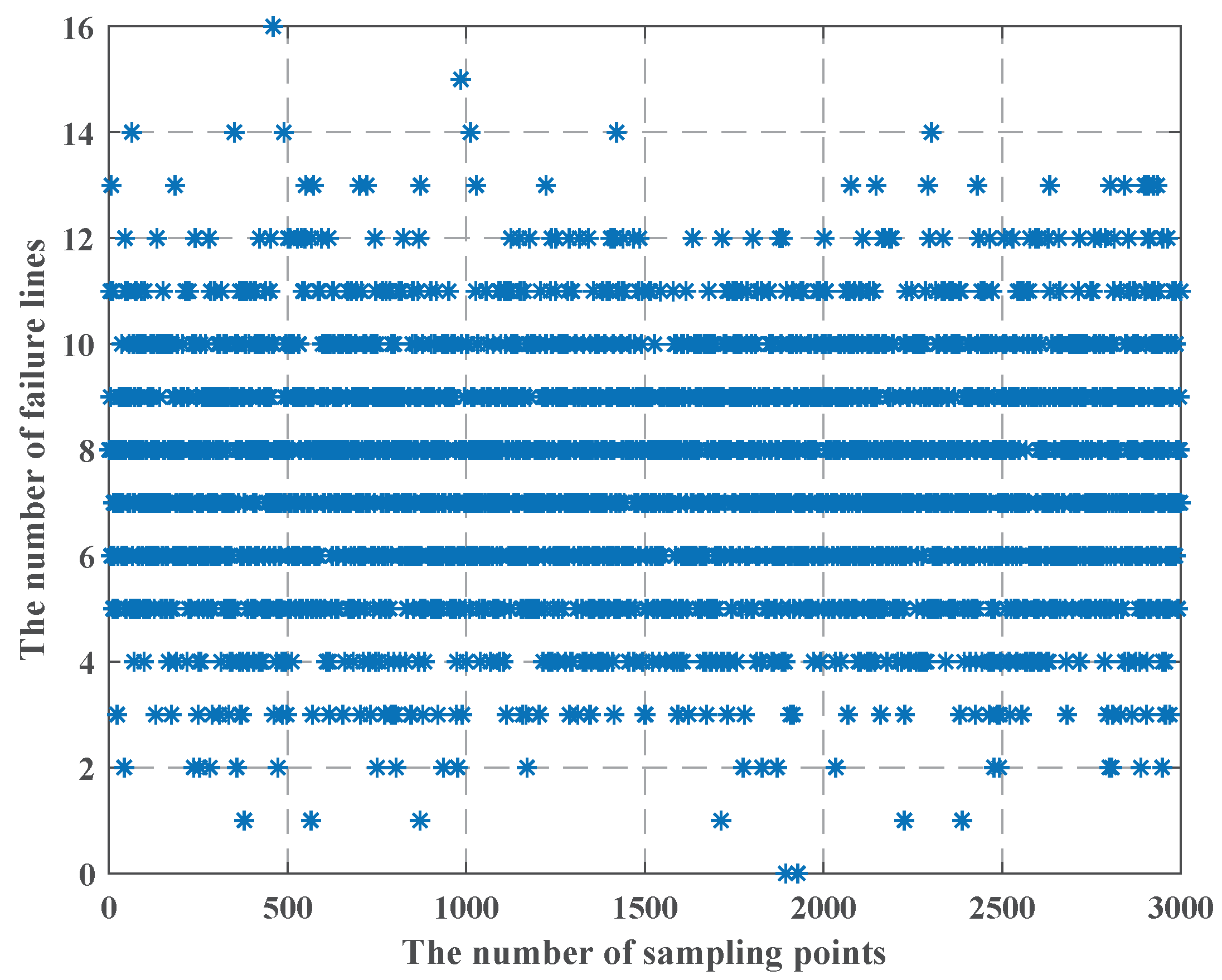
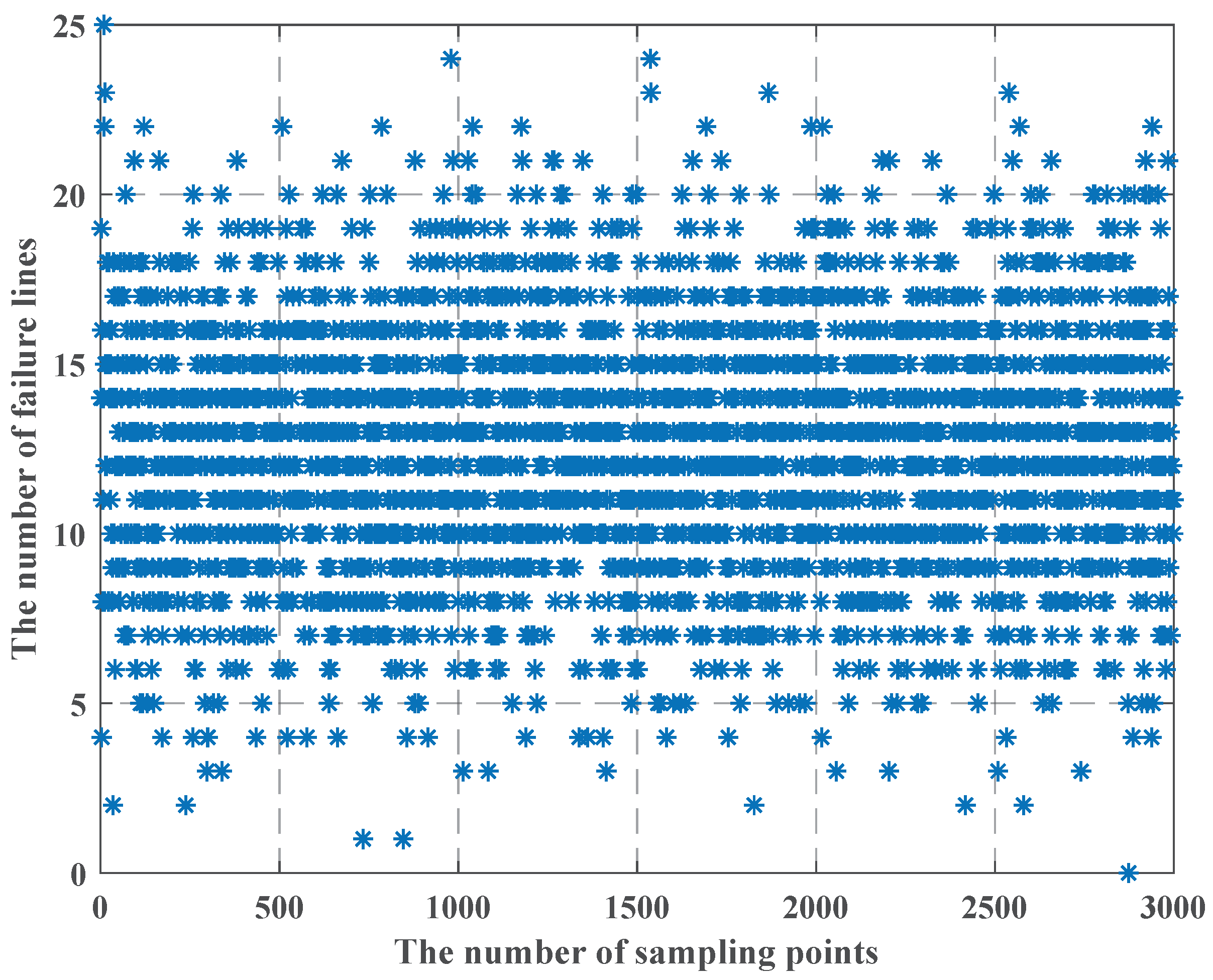
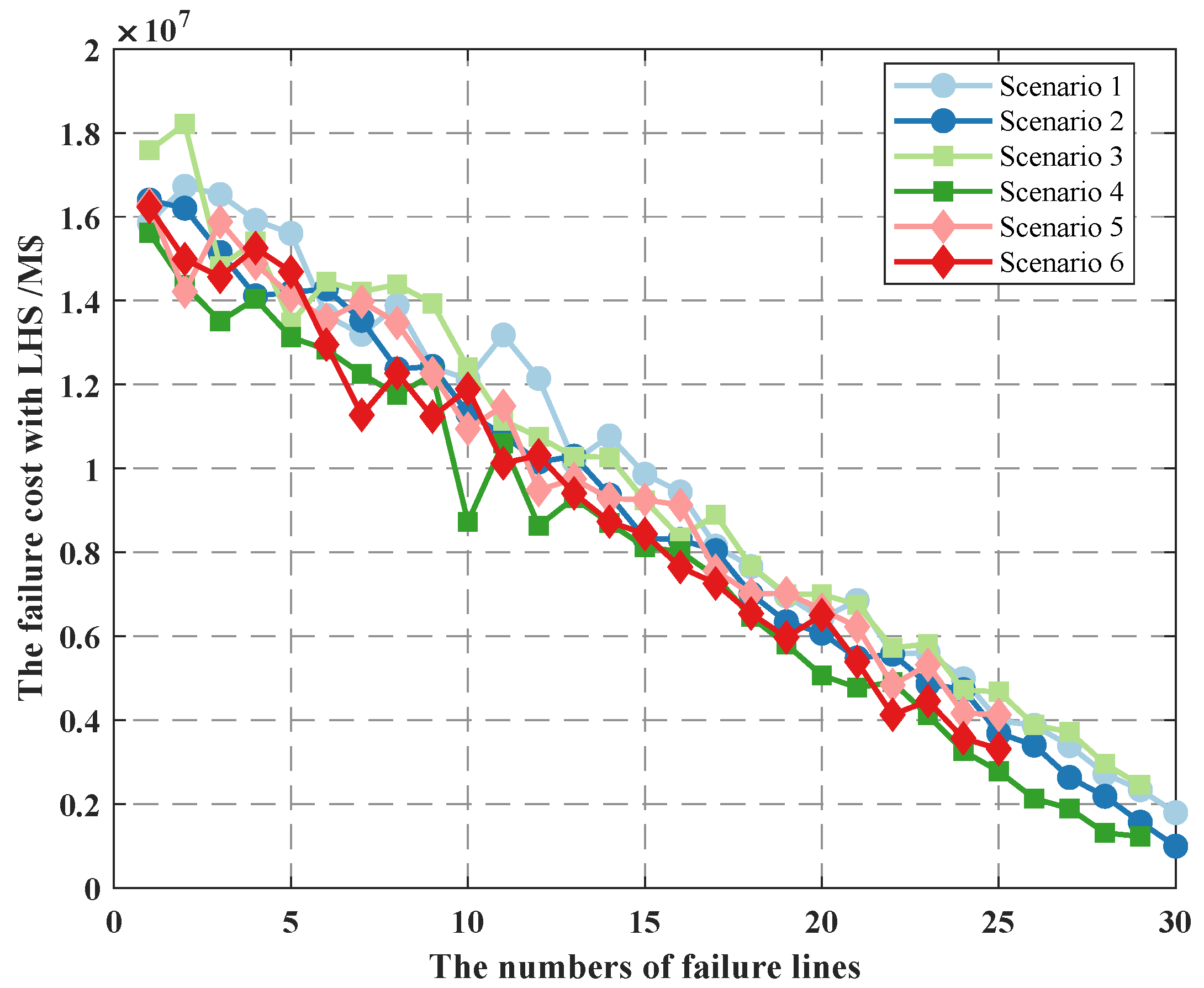
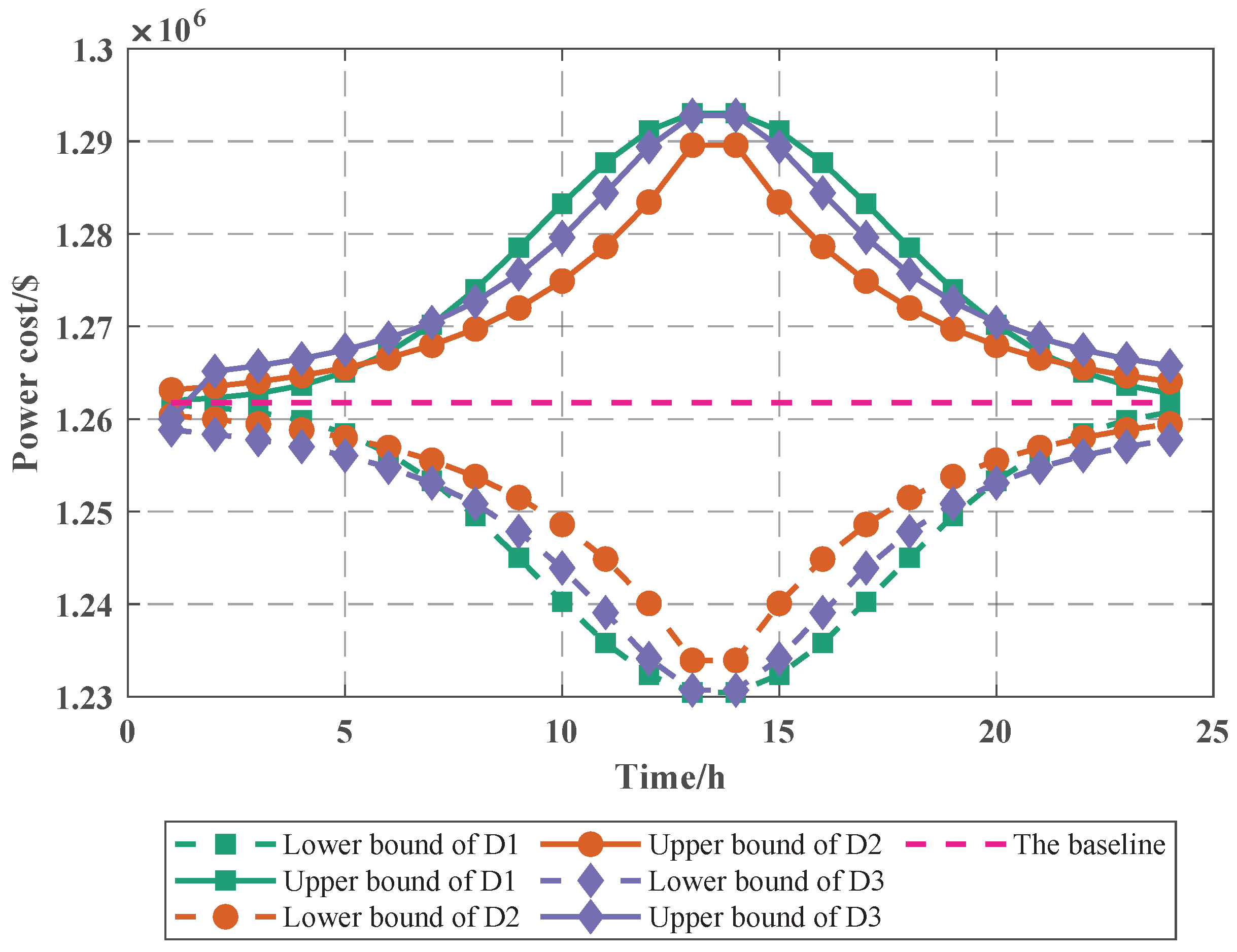
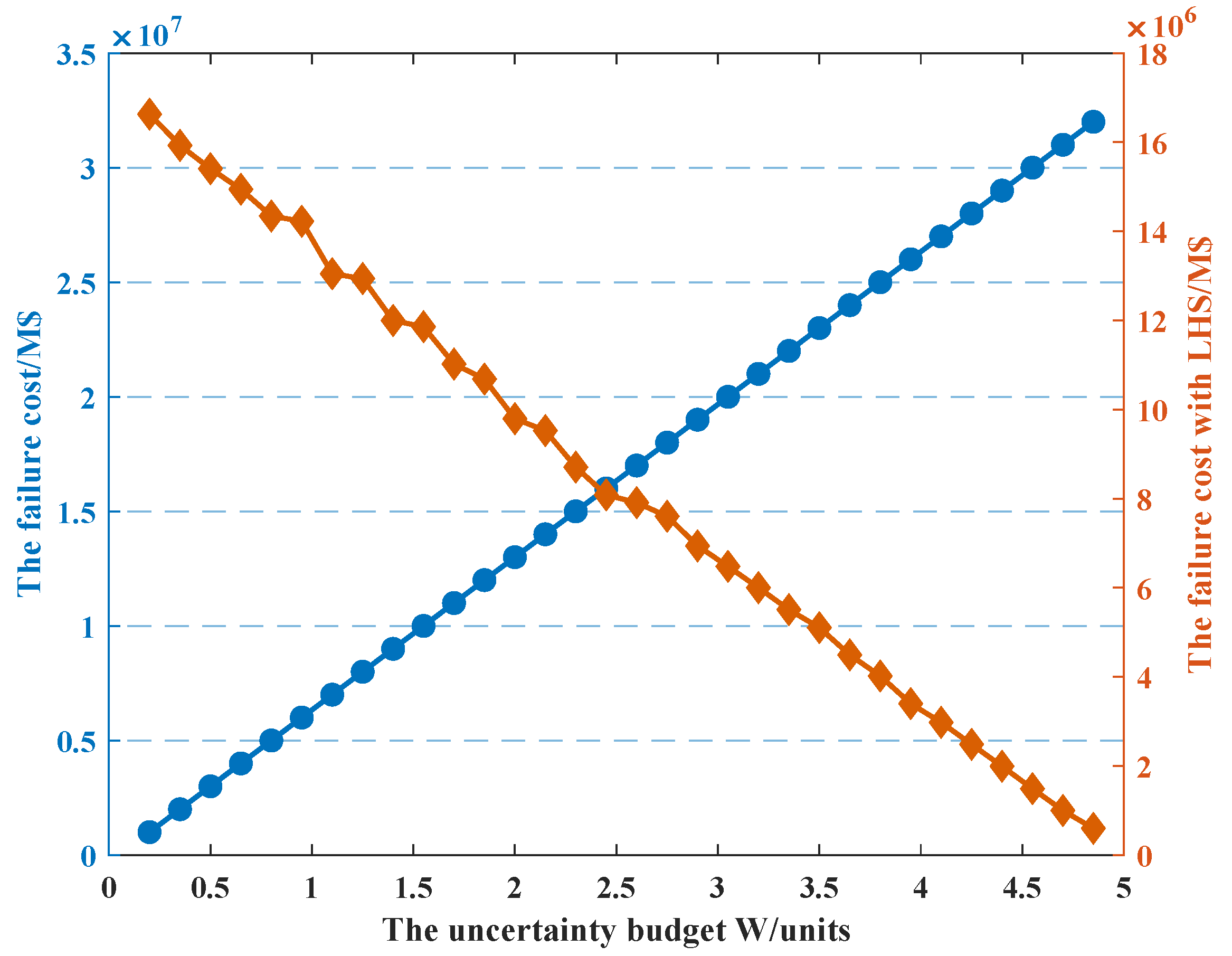
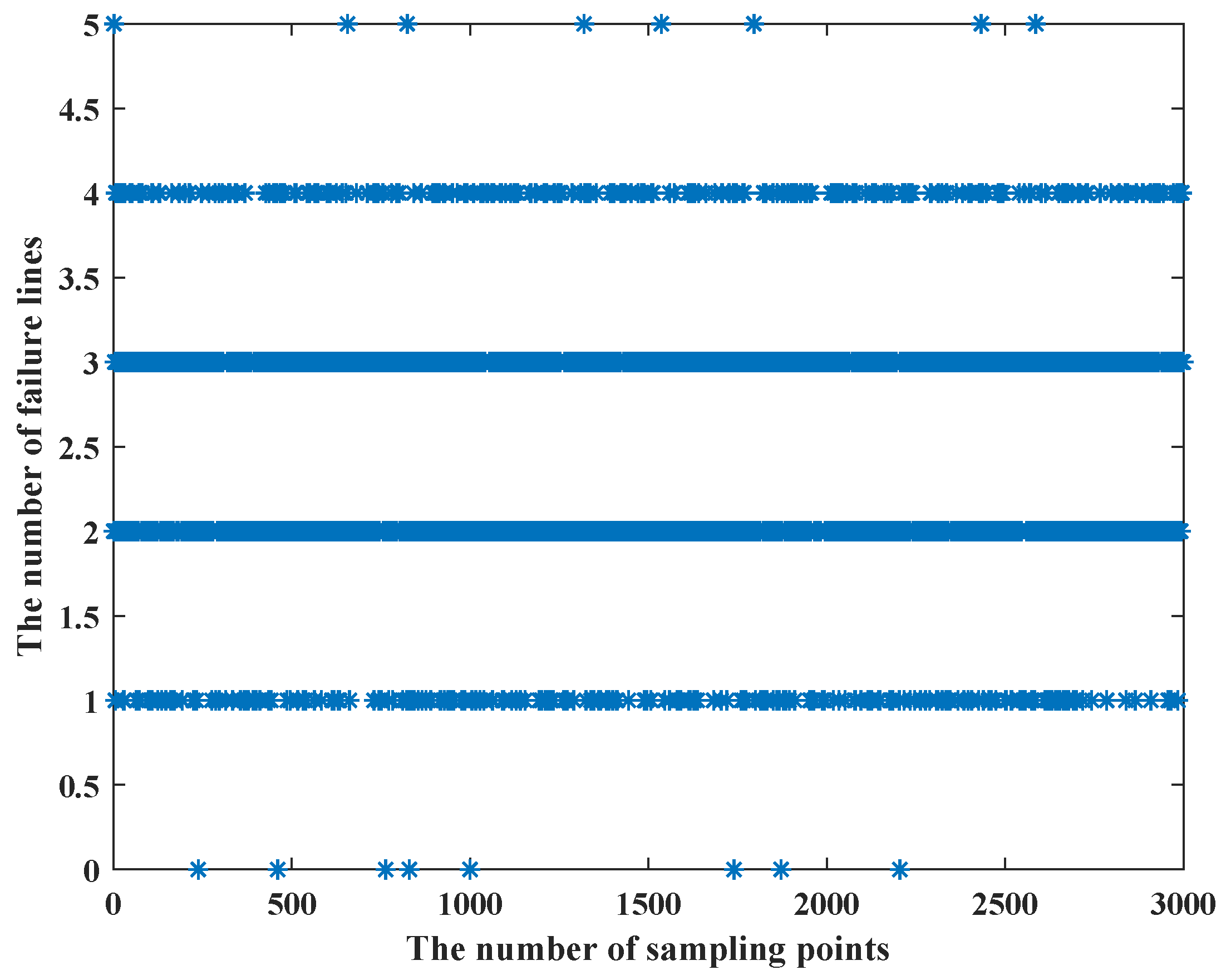
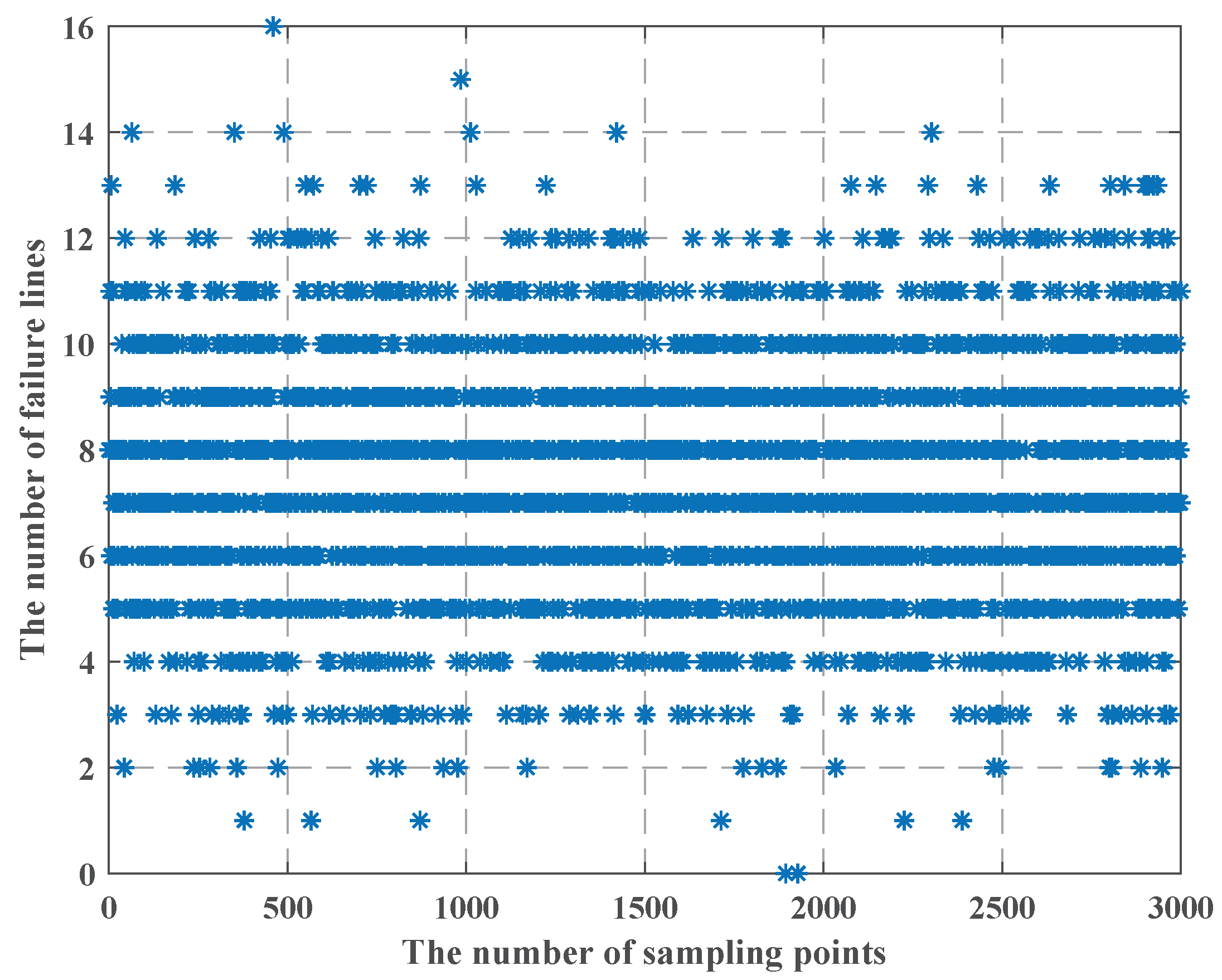
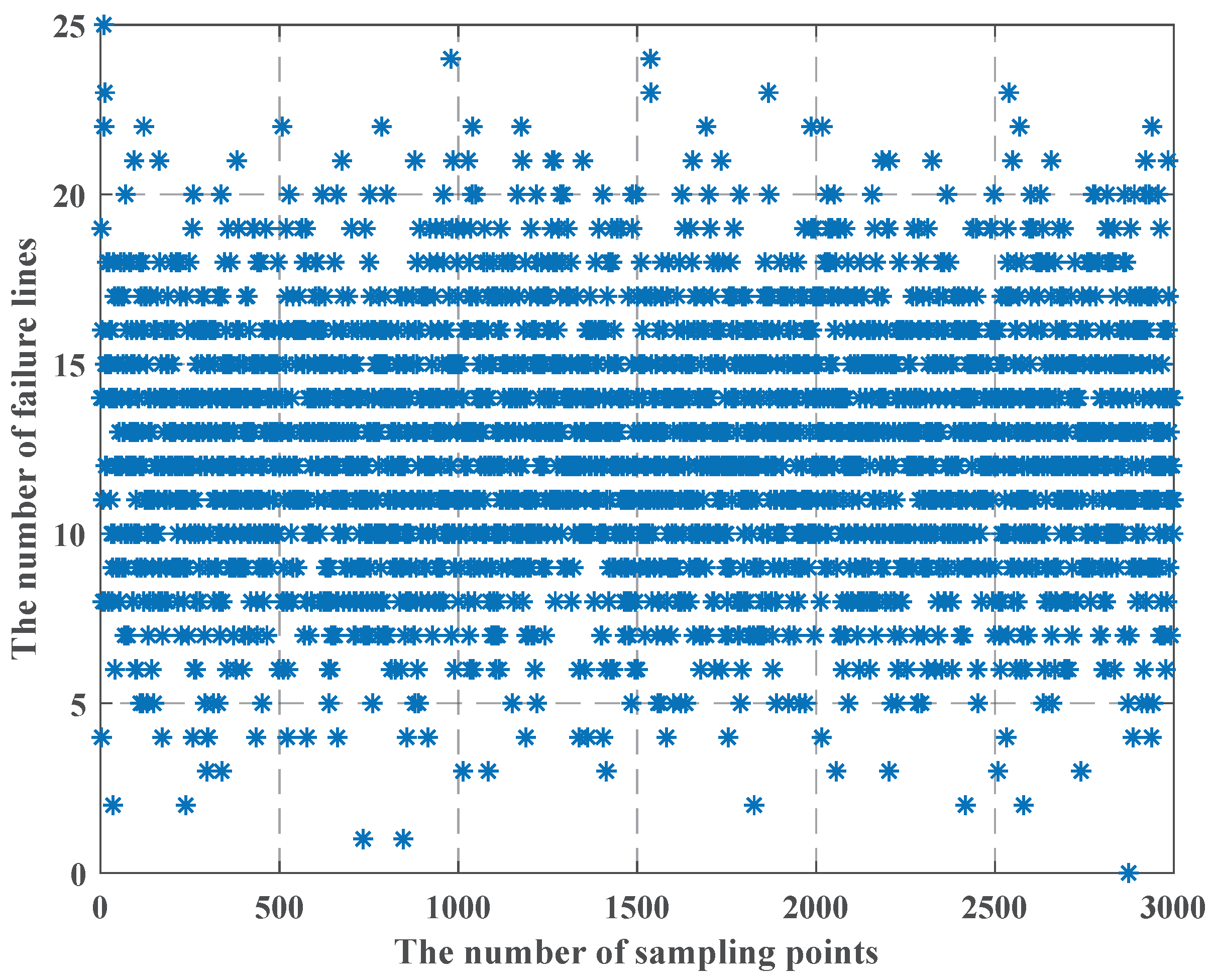
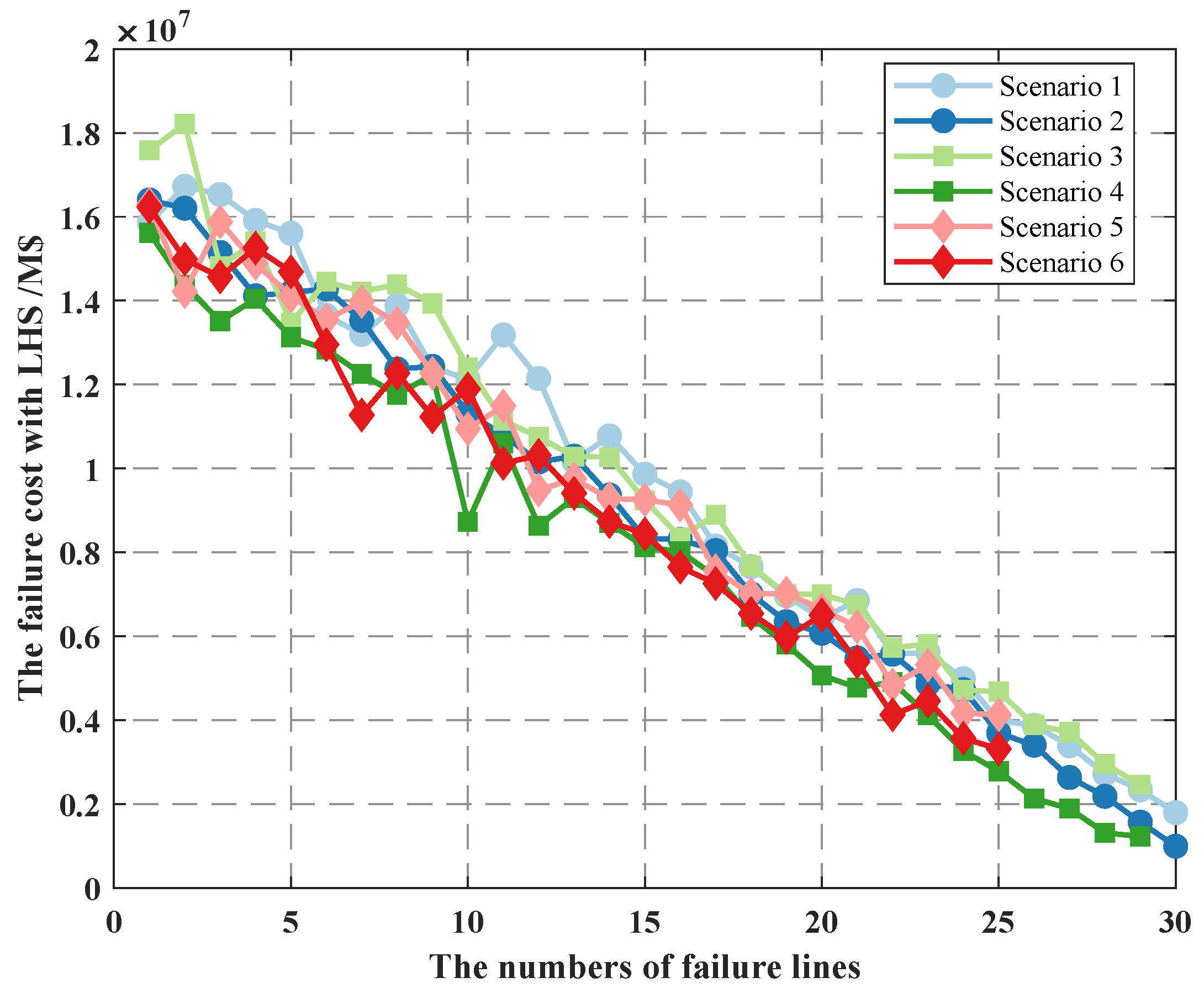
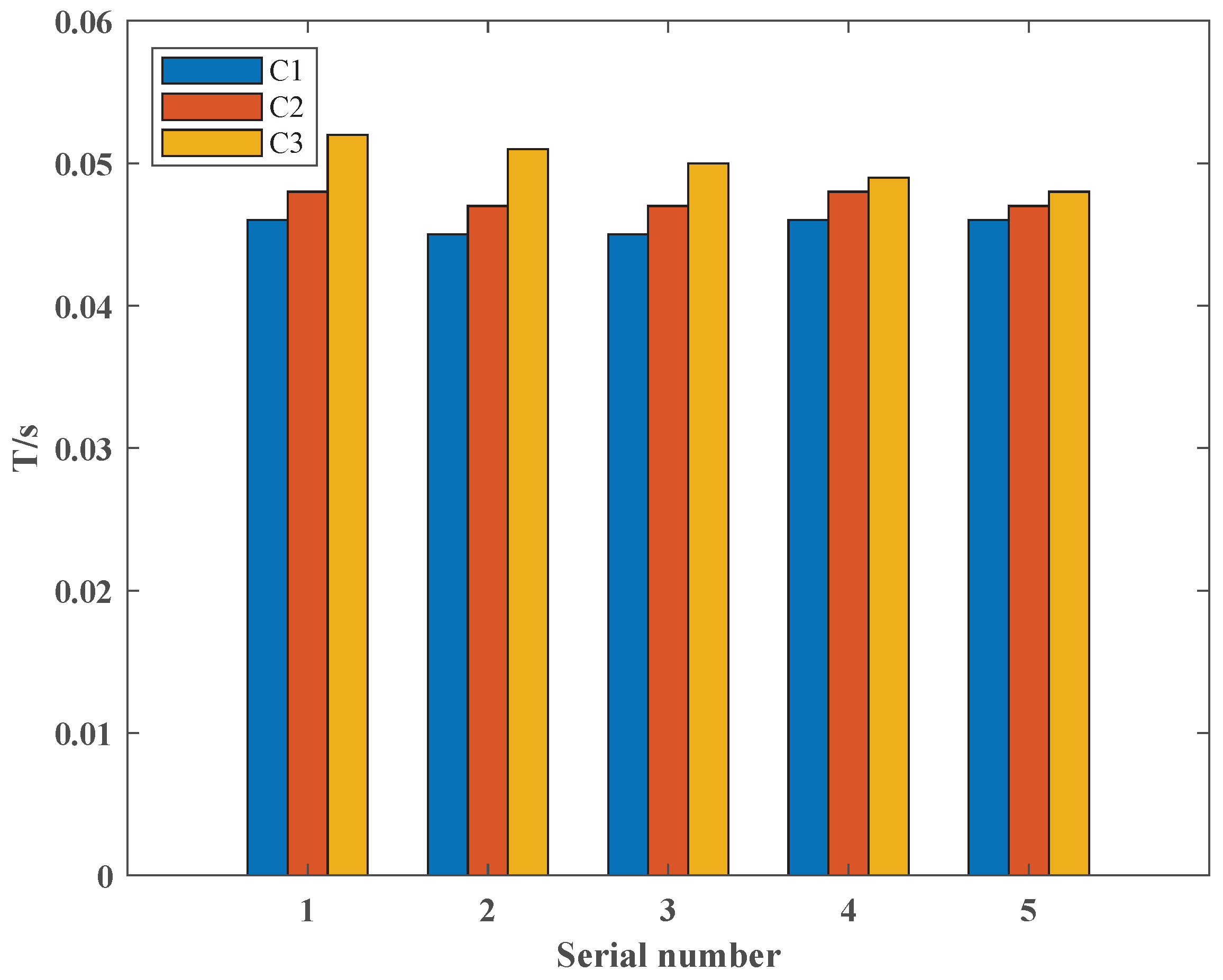
5.2. The Failure Cost of Line Switches
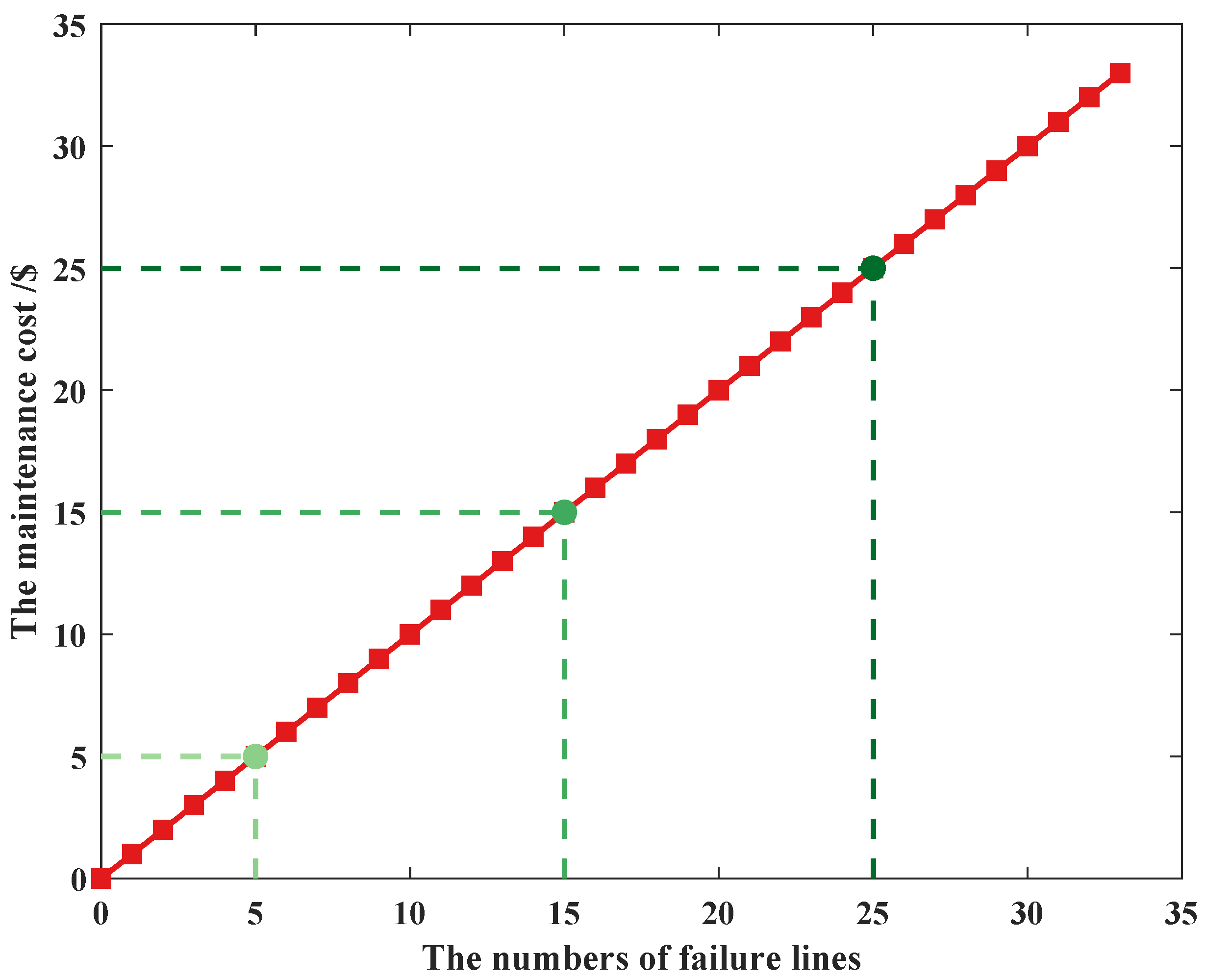
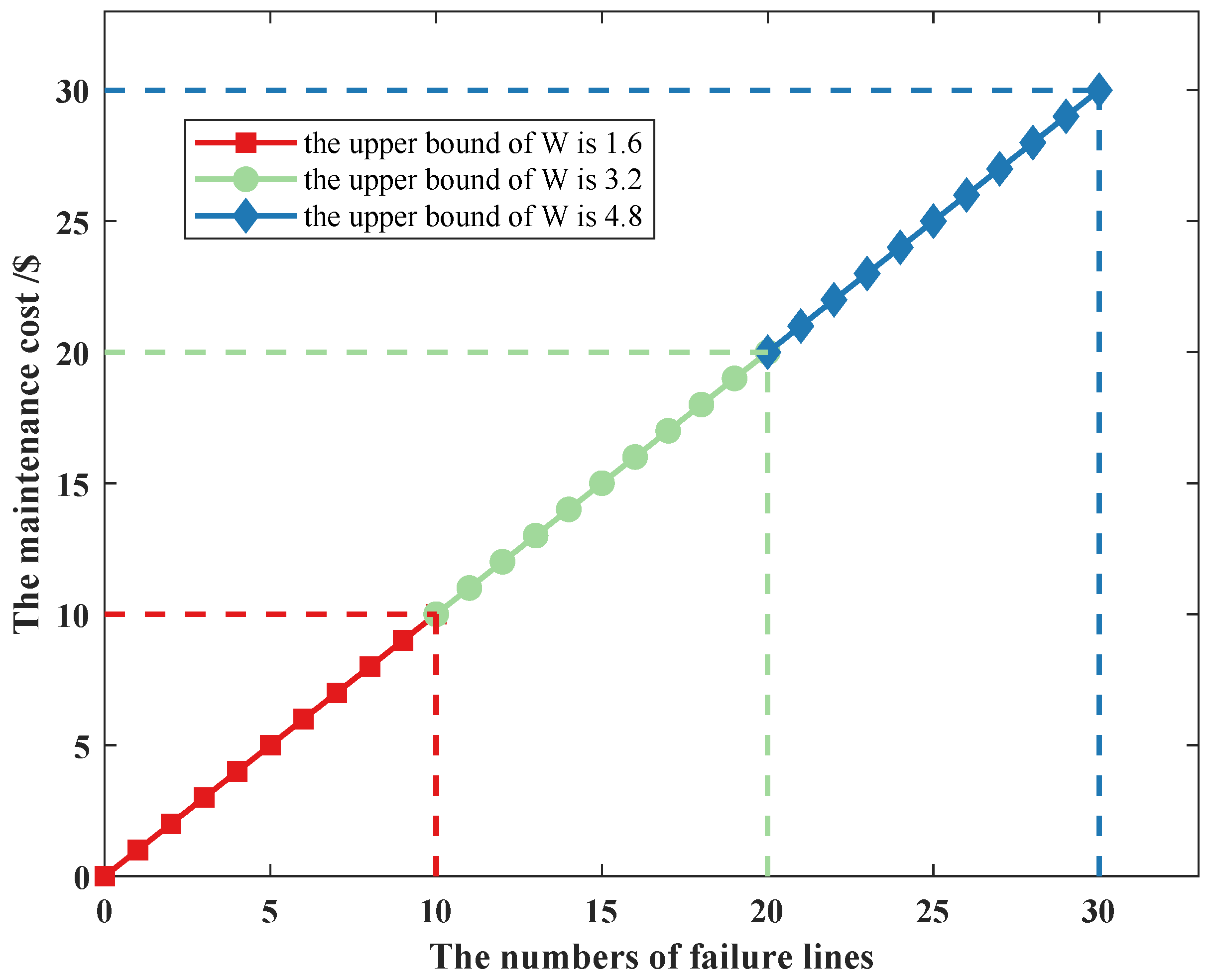
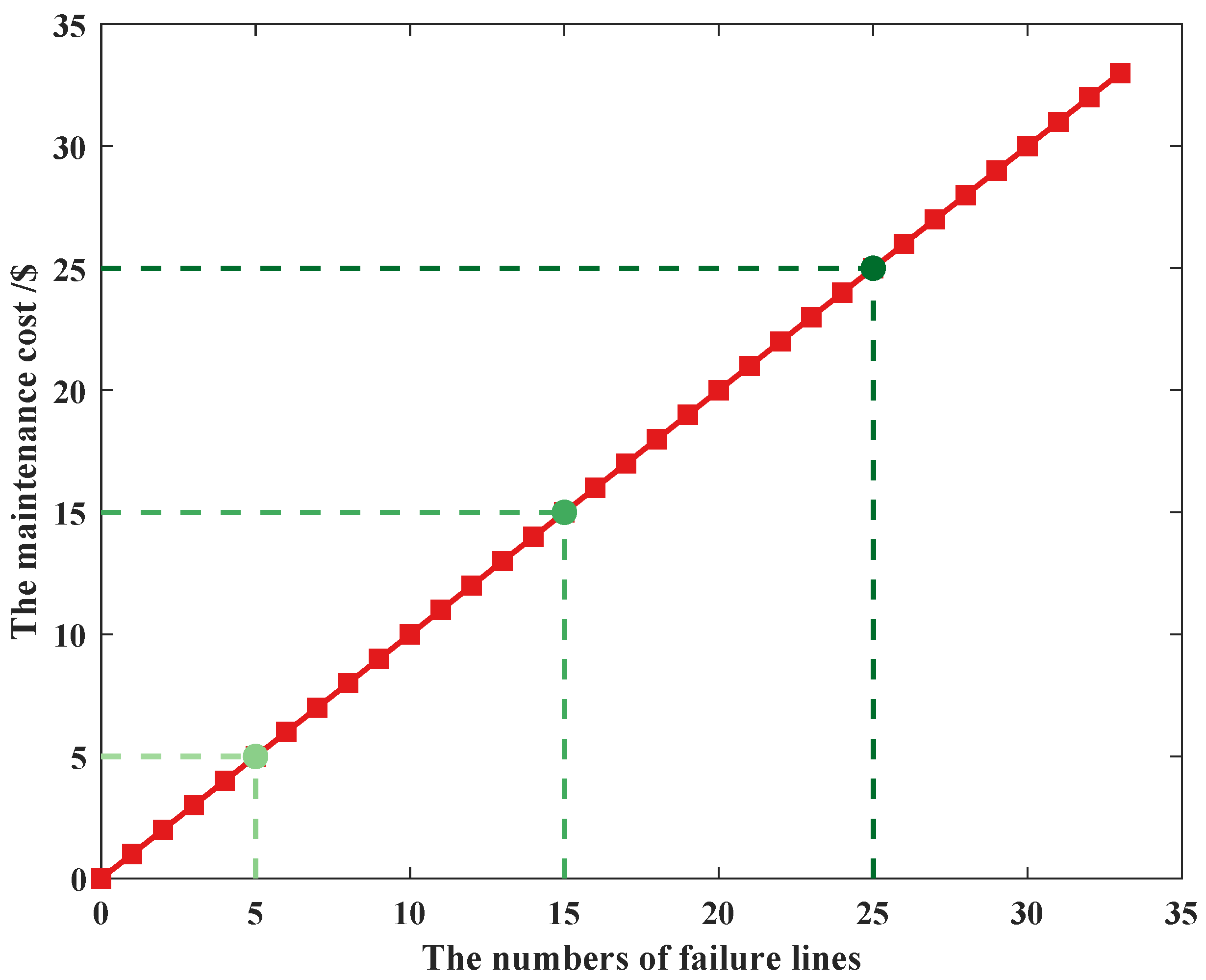
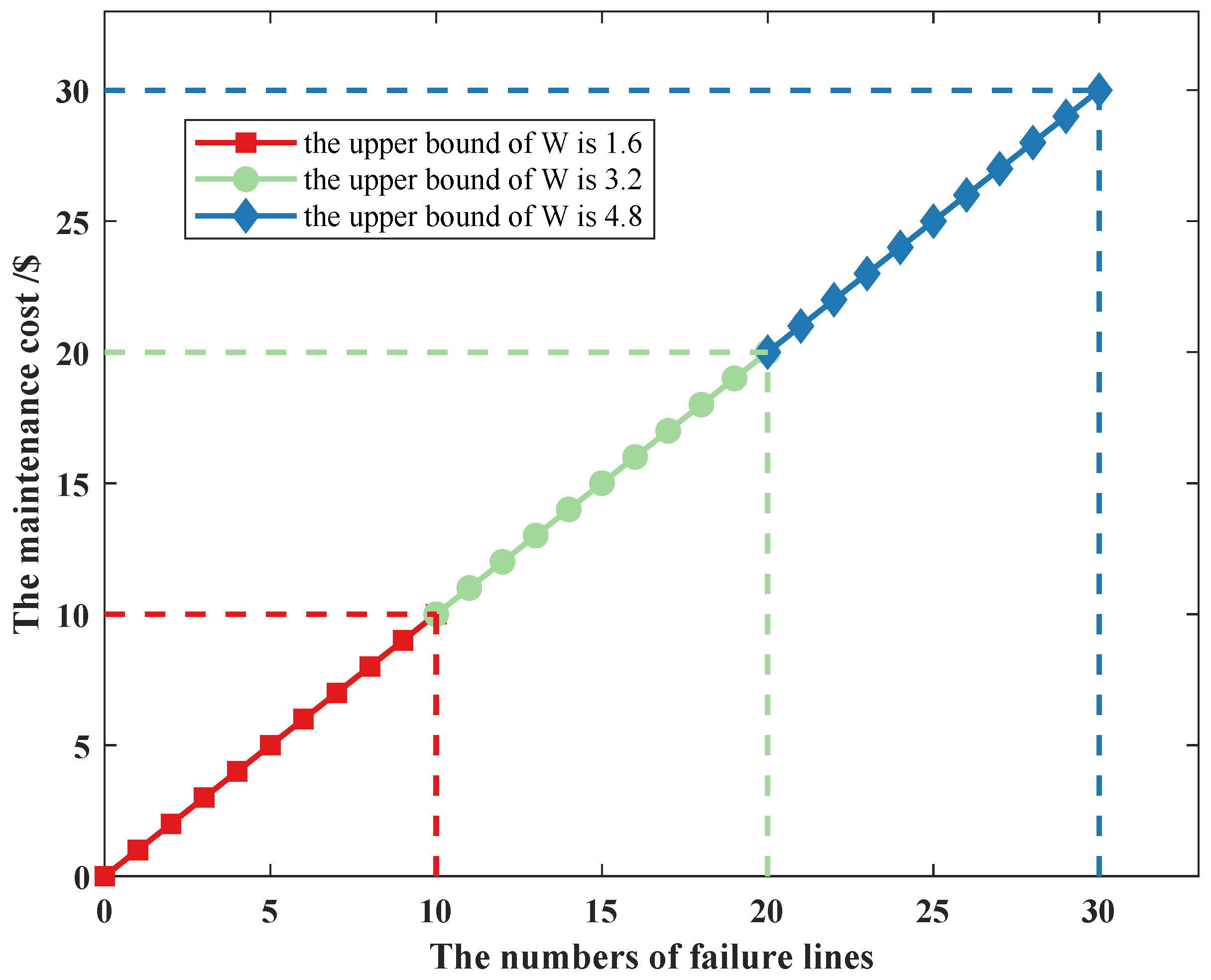
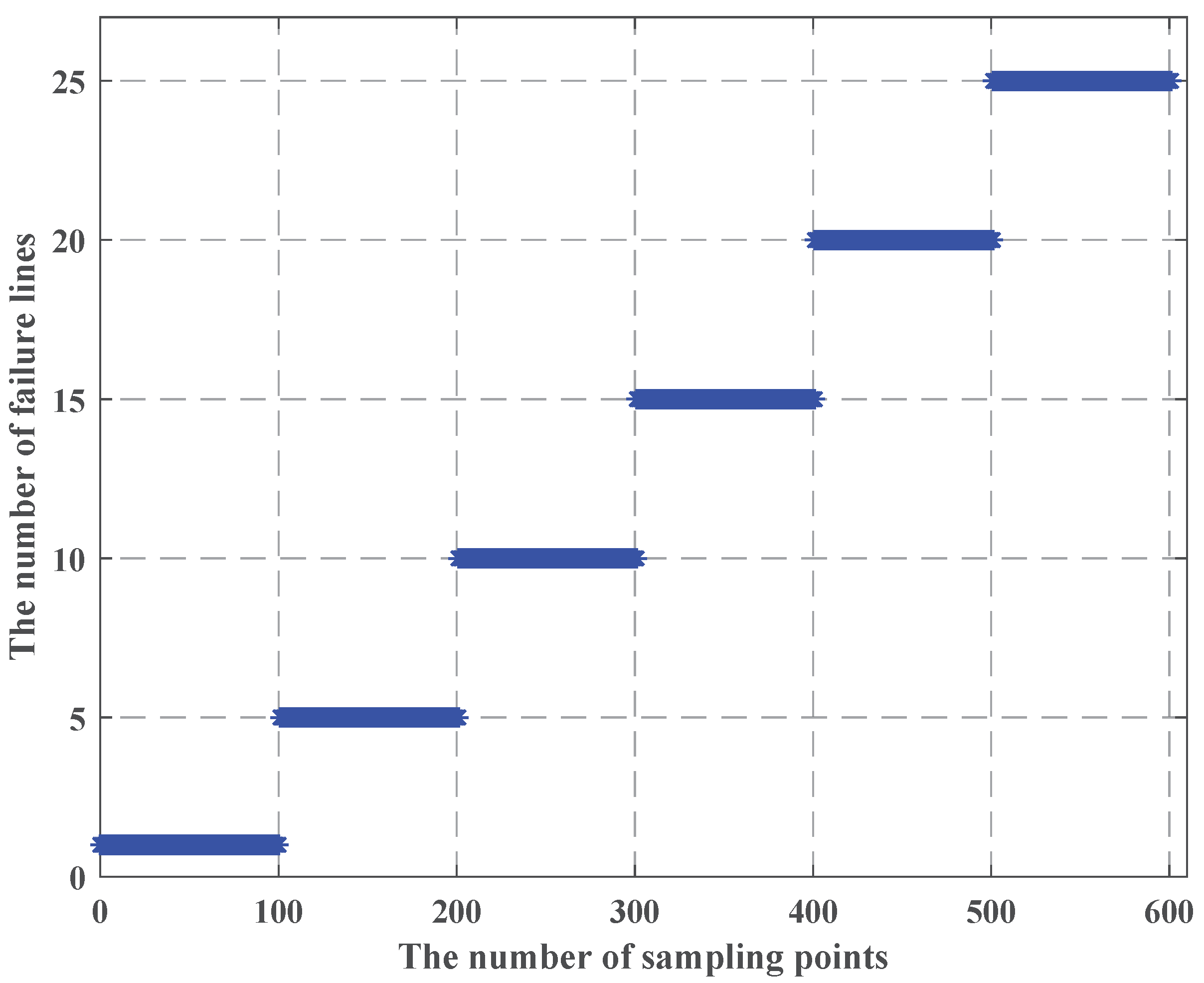
5.3. The Maintenance Cost Planning by Schedule Center
6. Conclusions
- We combine mathematical fitting and distribution functions to establish the PV power uncertainty model: we use the relevant index () and Nash–Sutcliffe efficiency (NSE) to obtain the best PV fitting curve, and then we use PV power errors that obey three distribution functions to represent the uncertainty of PV power. We have found that once the fitted PV power is determined, the PV power cost is affected by the PV power error, and it is consistent with the change of the distribution functions.
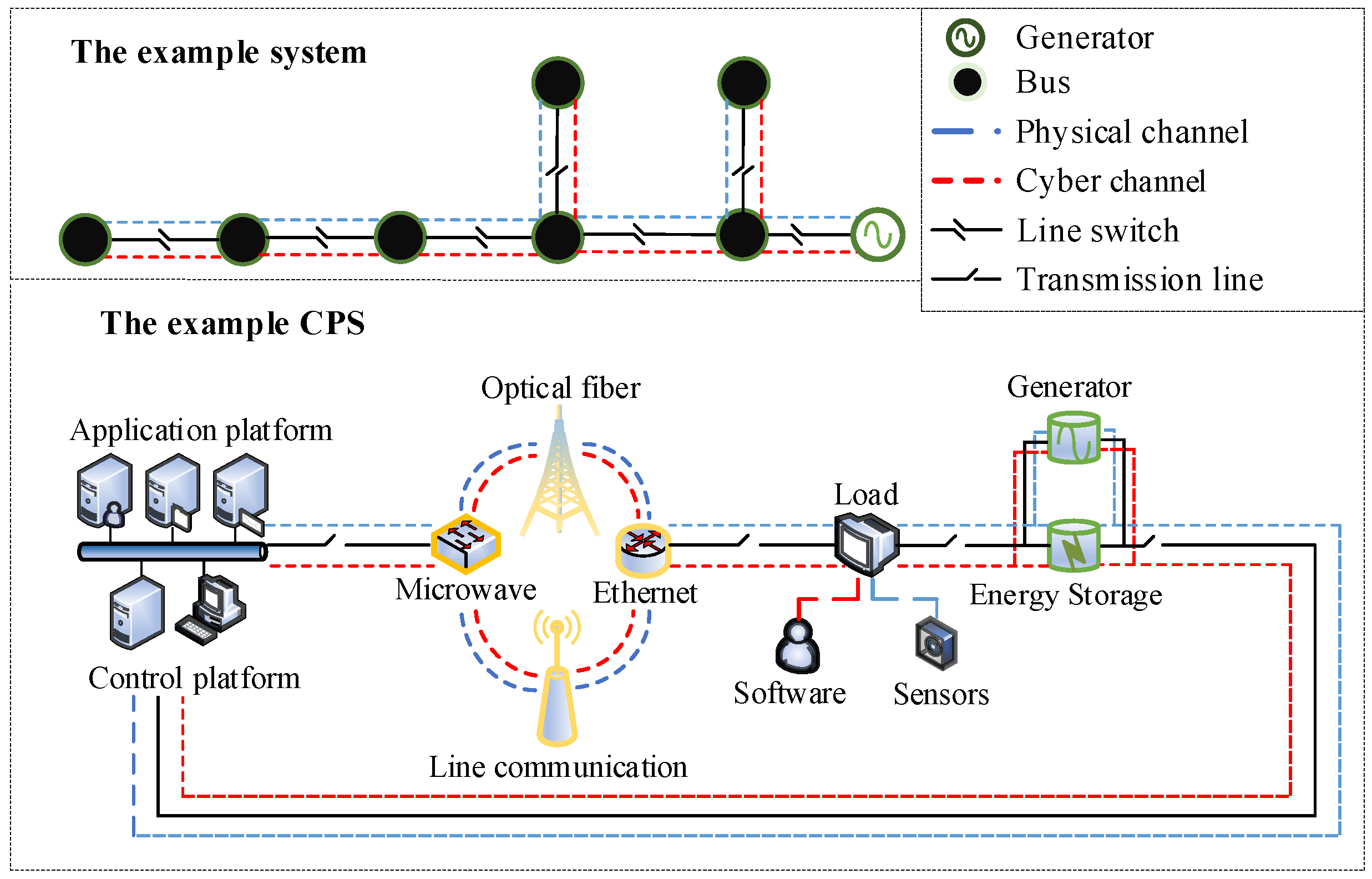
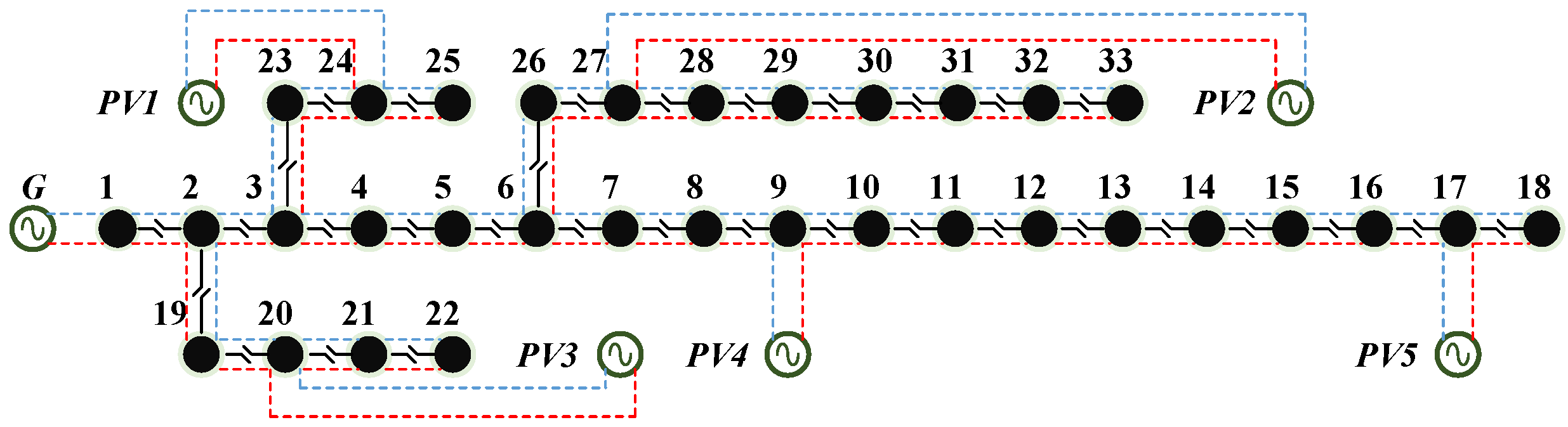
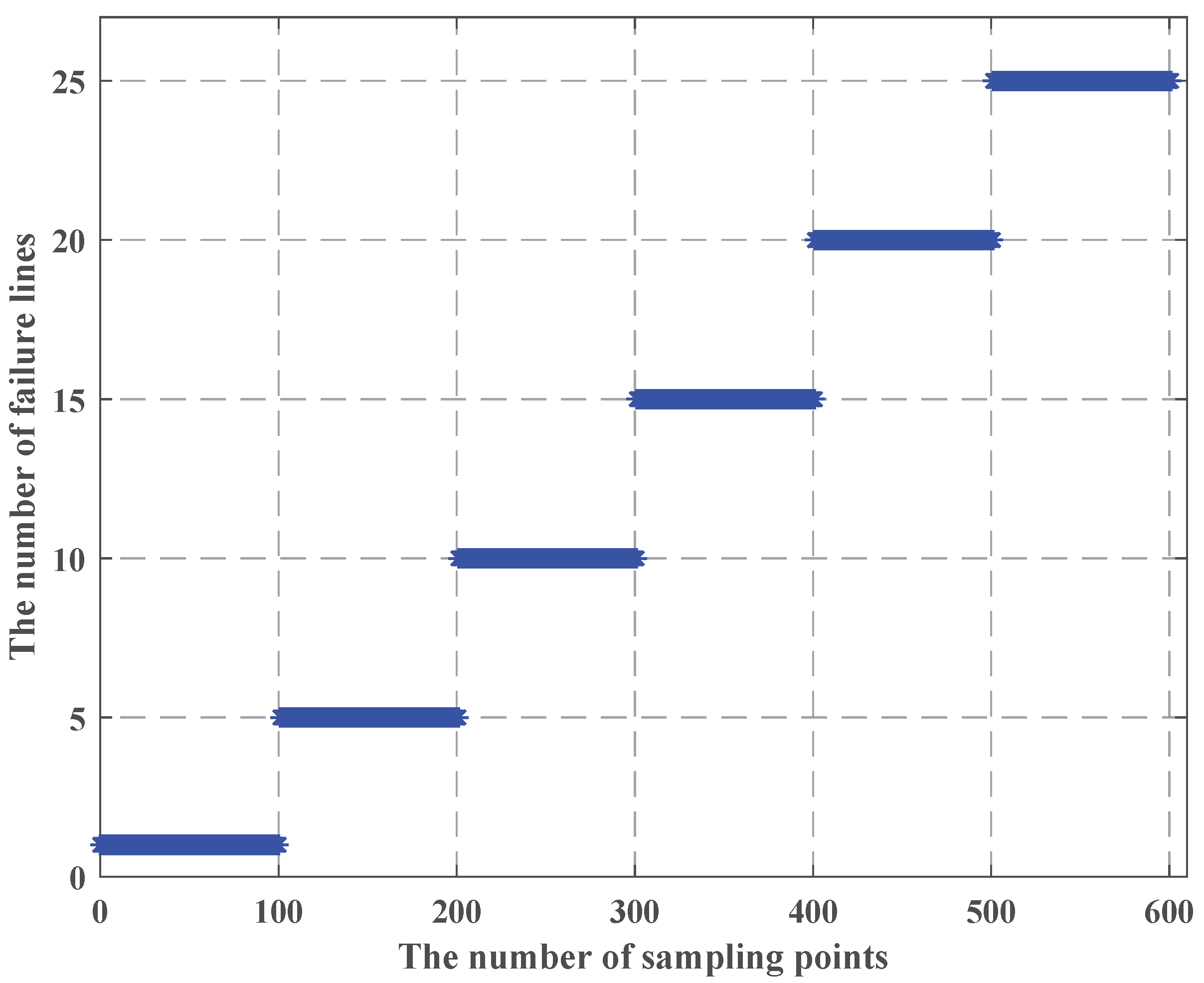
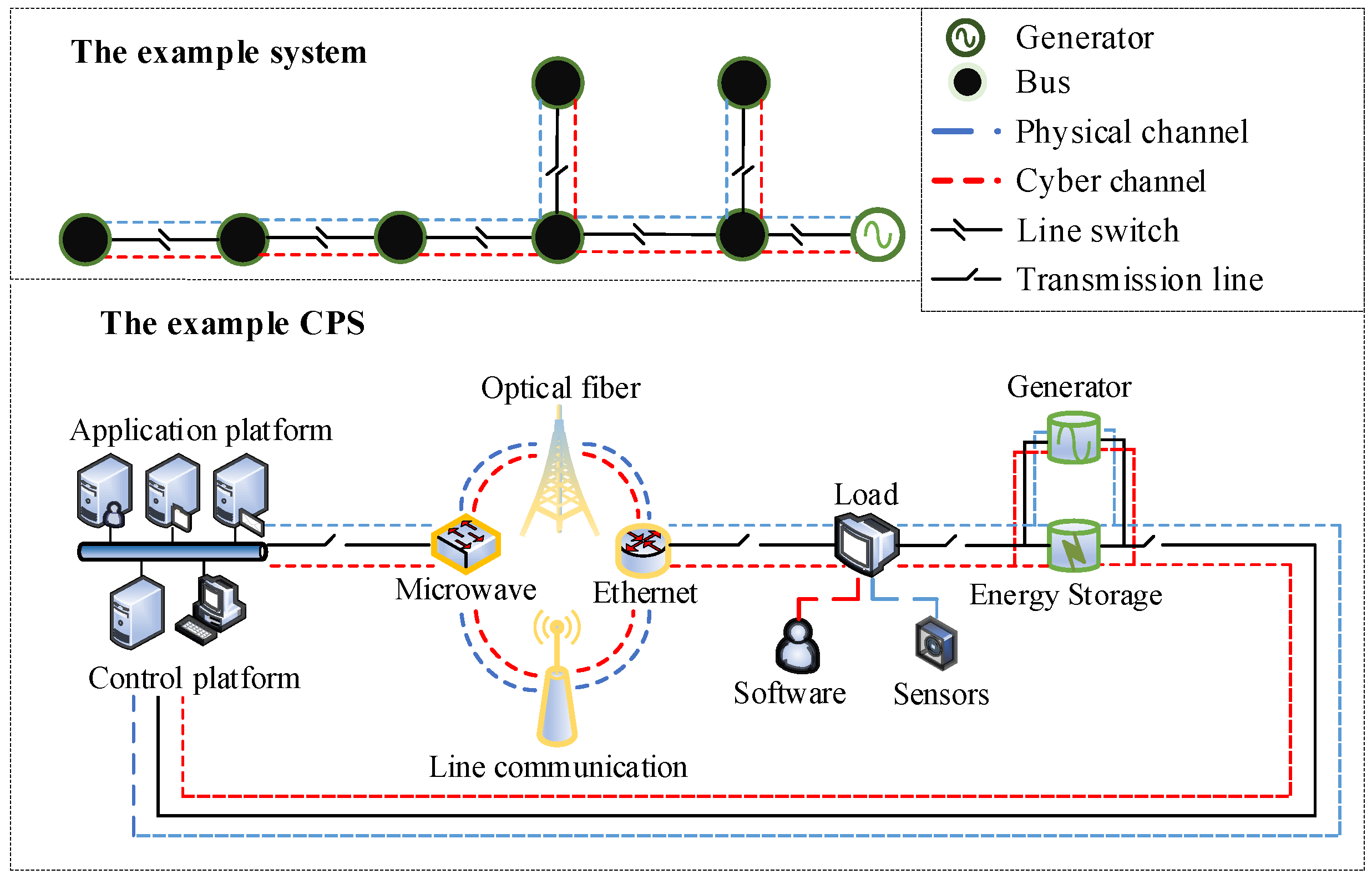
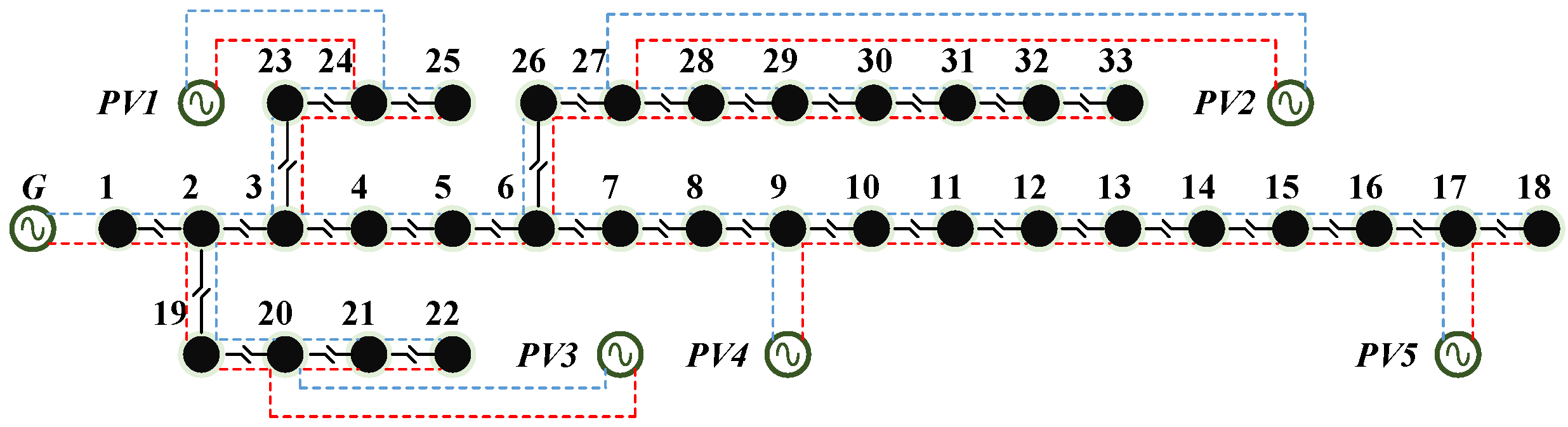
- After conducting an in-depth analysis of the correlation between the bus system and the actual distribution network (CPS), we propose the line-switch state uncertainty model: we guarantee the radial topology during the distribution network reconfiguration process, and we introduce uncertainty budgets and the probability of line-switch state uncertainty, Claude Shannon’s information theory to simplify scenarios, while we use the LHS method for sampling process. We have found that after we use the LHS method, the effect of uncertainty budget on failure cost is consistent with the effect of line-switch state uncertainty probability.
- We propose the maintenance model under the worst-case scenarios: based on the optimal PV power cost and the line failure cost, we have established the linearized line state model to achieve line control by the schedule center. With the minimal maintenance cost, we have found that the maintenance cost and the number of failure lines satisfy the linear growth relationship.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PV | photovoltaic |
| DG | distributed generator |
| LHS | Latin hypercube sampling |
| CPS | cyber-physical system |
Appendix A. Nomenclature
Appendix A.1. Sets and Indices
Appendix A.2. Parameters
Appendix A.3. Variables
References
- Dutta, R.; Chakrabarti, S.; Sharma, A. Topology Tracking for Active Distribution Networks. IEEE Trans. Power Syst. 2021, 36, 2855–2865. [Google Scholar] [CrossRef]
- Primadianto, A.; Lu, C.N. A Review on Distribution System State Estimation. IEEE Trans. Power Syst. 2017, 32, 3875–3883. [Google Scholar] [CrossRef]
- Wei, B.; Qiu, Z.; Deconinck, G. A Mean-Field Voltage Control Approach for Active Distribution Networks with Uncertainties. IEEE Trans. Smart Grid 2021, 12, 1455–1466. [Google Scholar] [CrossRef]
- Jiao, W.; Chen, J.; Wu, Q.; Li, C.; Zhou, B.; Huang, S. Distributed Coordinated Voltage Control for Distribution Networks with DG and OLTC Based on MPC and Gradient Projection. IEEE Trans. Power Syst. 2022, 37, 680–690. [Google Scholar] [CrossRef]
- Wang, J.; Jin, C.; Wang, P. A Uniform Control Strategy for the Interlinking Converter in Hierarchical Controlled Hybrid AC/DC Microgrids. IEEE Trans. Ind. Electron. 2018, 65, 6188–6197. [Google Scholar] [CrossRef]
- Sedghi, M.; Aliakbar-Golkar, M.; Haghifam, M.R. Distribution network expansion considering distributed generation and storage units using modified PSO algorithm. Int. J. Electr. Power Energy Syst. 2013, 52, 221–230. [Google Scholar] [CrossRef]
- Cupelli, L.; Cupelli, M.; Ponci, F.; Monti, A. Data-Driven Adaptive Control for Distributed Energy Resources. IEEE Trans. Sustain. Energy 2019, 10, 1575–1584. [Google Scholar] [CrossRef]
- Aziz, T.; Ketjoy, N. Enhancing PV Penetration in LV Networks Using Reactive Power Control and On Load Tap Changer with Existing Transformers. IEEE Access 2018, 6, 2683–2691. [Google Scholar] [CrossRef]
- Shafiee, S.; Fotuhi-Firuzabad, M.; Rastegar, M. Investigating the Impacts of Plug-in Hybrid Electric Vehicles on Power Distribution Systems. IEEE Trans. Smart Grid 2013, 4, 1351–1360. [Google Scholar] [CrossRef]
- Kharrazi, A.; Mishra, Y.; Sreeram, V. Discrete-Event Systems Supervisory Control for a Custom Power Park. IEEE Trans. Smart Grid 2019, 10, 483–492. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Liu, J.; Xiang, Y.; Yuan, X. Optimal planning of AC-DC hybrid transmission and distributed energy resource system: Review and prospects. CSEE J. Power Energy Syst. 2019, 5, 409–422. [Google Scholar] [CrossRef]
- Garmrudi, M.; Nafisi, H.; Fereidouni, A.; Hashemi, H. A Novel Hybrid Islanding Detection Technique Using Rate of Voltage Change and Capacitor Tap Switching. Electr. Power Components Syst. 2012, 40, 1149–1159. [Google Scholar] [CrossRef]
- Aghamohamadi, M.; Mahmoudi, A.; Haque, M.H. Two-Stage Robust Sizing and Operation Co-Optimization for Residential PV–Battery Systems Considering the Uncertainty of PV Generation and Load. IEEE Trans. Ind. Inform. 2021, 17, 1005–1017. [Google Scholar] [CrossRef]
- Scolari, E.; Reyes-Chamorro, L.; Sossan, F.; Paolone, M. A Comprehensive Assessment of the Short-Term Uncertainty of Grid-Connected PV Systems. IEEE Trans. Sustain. Energy 2018, 9, 1458–1467. [Google Scholar] [CrossRef]
- Wen, Y.; AlHakeem, D.; Mandal, P.; Chakraborty, S.; Wu, Y.K.; Senjyu, T.; Paudyal, S.; Tseng, T.L. Performance Evaluation of Probabilistic Methods Based on Bootstrap and Quantile Regression to Quantify PV Power Point Forecast Uncertainty. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1134–1144. [Google Scholar] [CrossRef]
- Celli, G.; Ghiani, E.; Pilo, F.; Soma, G.G. Reliability assessment in smart distribution networks. Electr. Power Syst. Res. 2013, 104, 164–175. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, T.; Luo, F.; Li, F.; Liu, Y. Impacts of Cyber System on Microgrid Operational Reliability. IEEE Trans. Smart Grid 2019, 10, 105–115. [Google Scholar] [CrossRef]
- Fan, Z.; Kulkarni, P.; Gormus, S.; Efthymiou, C.; Kalogridis, G.; Sooriyabandara, M.; Zhu, Z.; Lambotharan, S.; Chin, W.H. Smart Grid Communications: Overview of Research Challenges, Solutions, and Standardization Activities. IEEE Commun. Surv. Tutor. 2013, 15, 21–38. [Google Scholar] [CrossRef] [Green Version]
- Cintuglu, M.H.; Mohammed, O.A.; Akkaya, K.; Uluagac, A.S. A Survey on Smart Grid Cyber-Physical System Testbeds. IEEE Commun. Surv. Tutor. 2017, 19, 446–464. [Google Scholar] [CrossRef]
- Liu, X.; Wen, Y.; Li, Z. Multiple Solutions of Transmission Line Switching in Power Systems. IEEE Trans. Power Syst. 2018, 33, 1118–1120. [Google Scholar] [CrossRef]
- Zheng, W.; Huang, W.; Hill, D.J.; Hou, Y. An Adaptive Distributionally Robust Model for Three-Phase Distribution Network Reconfiguration. IEEE Trans. Smart Grid 2021, 12, 1224–1237. [Google Scholar] [CrossRef]
- Liu, W.; Gong, Q.; Han, H.; Wang, Z.; Wang, L. Reliability Modeling and Evaluation of Active Cyber Physical Distribution System. IEEE Trans. Power Syst. 2018, 33, 7096–7108. [Google Scholar] [CrossRef]
- Chang, G.W.; Lu, H.J. Integrating Gray Data Preprocessor and Deep Belief Network for Day-Ahead PV Power Output Forecast. IEEE Trans. Sustain. Energy 2020, 11, 185–194. [Google Scholar] [CrossRef]
- Avila, N.F.; Chu, C.C. Distributed Probabilistic ATC Assessment by Optimality Conditions Decomposition and LHS Considering Intermittent Wind Power Generation. IEEE Trans. Sustain. Energy 2019, 10, 375–385. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Curve | NSE | |
|---|---|---|
| 1 | 0.9605 | 0.9632 |
| 2 | 0.848 | 0.9023 |
| 3 | 0.8024 | 0.7891 |
| 4 | 0.8628 | 0.8829 |
| 5 | 0.8057 | 0.8554 |
| 6 | 0.8322 | 0.8583 |
| 7 | 0.8502 | 0.709 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, L.; Wang, X.; Tian, M.; Yao, H.; Long, J. Multi-Objective Optimal Planning for Distribution Network Considering the Uncertainty of PV Power and Line-Switch State. Sensors 2022, 22, 4927. https://doi.org/10.3390/s22134927
Gong L, Wang X, Tian M, Yao H, Long J. Multi-Objective Optimal Planning for Distribution Network Considering the Uncertainty of PV Power and Line-Switch State. Sensors. 2022; 22(13):4927. https://doi.org/10.3390/s22134927
Chicago/Turabian StyleGong, Li, Xianpei Wang, Meng Tian, Hongtai Yao, and Jiachuan Long. 2022. "Multi-Objective Optimal Planning for Distribution Network Considering the Uncertainty of PV Power and Line-Switch State" Sensors 22, no. 13: 4927. https://doi.org/10.3390/s22134927
APA StyleGong, L., Wang, X., Tian, M., Yao, H., & Long, J. (2022). Multi-Objective Optimal Planning for Distribution Network Considering the Uncertainty of PV Power and Line-Switch State. Sensors, 22(13), 4927. https://doi.org/10.3390/s22134927