
A Path-Following Controller for Marine Vehicles Using a Two-Scale Inner-Outer Loop Approach




Abstract
:1. Introduction
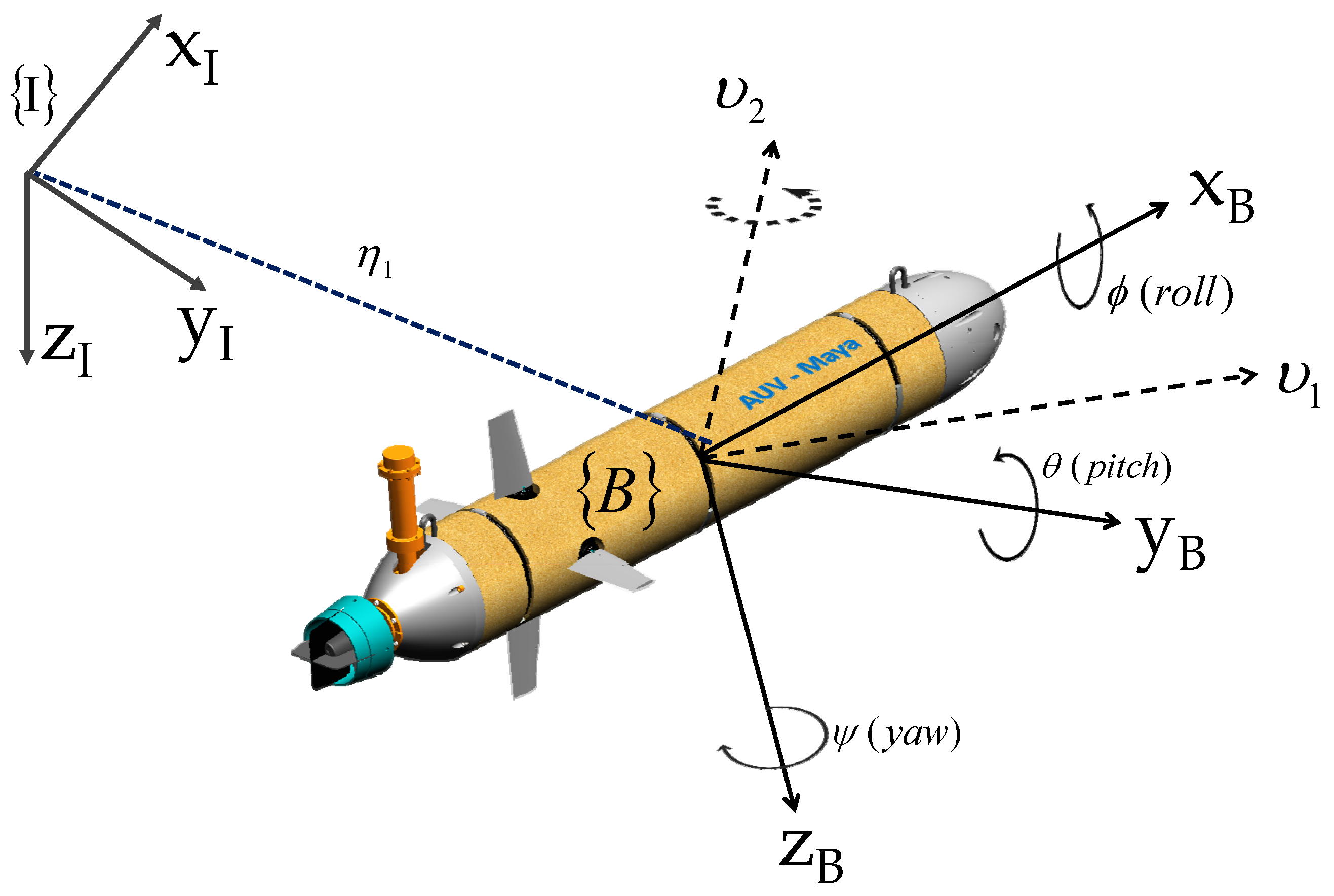
2. Notation and AUV Modeling
2.1. Vehicle Modeling
- is the linear velocity of the origin of with respect to expressed in (i.e., body-fixed linear velocity).
- is the angular velocity of with respect to expressed in (i.e., body-fixed angular velocity).
- is the position of the origin of measured in .
- parameterizes locally the orientation of with respect to .
2.2. Kinematics
2.3. Dynamics
- ,
- ,
- —control inputs (forces and torques due to thrusters/surfaces);
- —terms due to added masses;
- —hydrodynamics terms due to lift, drag, skin friction, etc.;
- —restoring forces and torques due to the interplay between gravity and buoyancy forces;
- —terms due to external disturbances, e.g., waves, winds, etc.
3. Examples of Horizontal Plane Dynamics
3.1. 3-DOF Nonlinear Model
3.2. MEDUSA-Class Vehicle as an Example
3.3. Maya AUV: An Example
4. Heading Control for a 3-DOF Nonlinear Model
- (a)
- The surge velocity u is much larger than the sway v so that is constant, where U is the total speed of the vehicle w.r.t the fluid;
- (b)
- The yaw rate and therefore yaw are controlled using a proportional-derivative control law given by, i.e., , where is the negative of the yaw heading error, and is the heading command;
- (c)
- The dynamics of the heading is replaced by the dynamics of the heading error, i.e., .
5. Analysis of the Stability of the Origin
5.1. Input-to-State Stability (ISS)
5.2. Input-Output Stability (IOS)
- is an equilibrium point of (52), and there is Lyapunov functionthat satisfiesfor allfor some positive constantsand.
- f and h satisfy the inequalitiesfor allfor some non negative constantsand.
5.3. ISS Analysis
- (I)
- and because and ;
- (II)
- .This follows from the inequality .
5.4. IOS Analysis
- From inequality (53)Thus,and
- From inequality (54)and therefore
- From inequality (55)Thus,
- From inequality (56)and therefore .
- From inequality (57)we obtain thatand
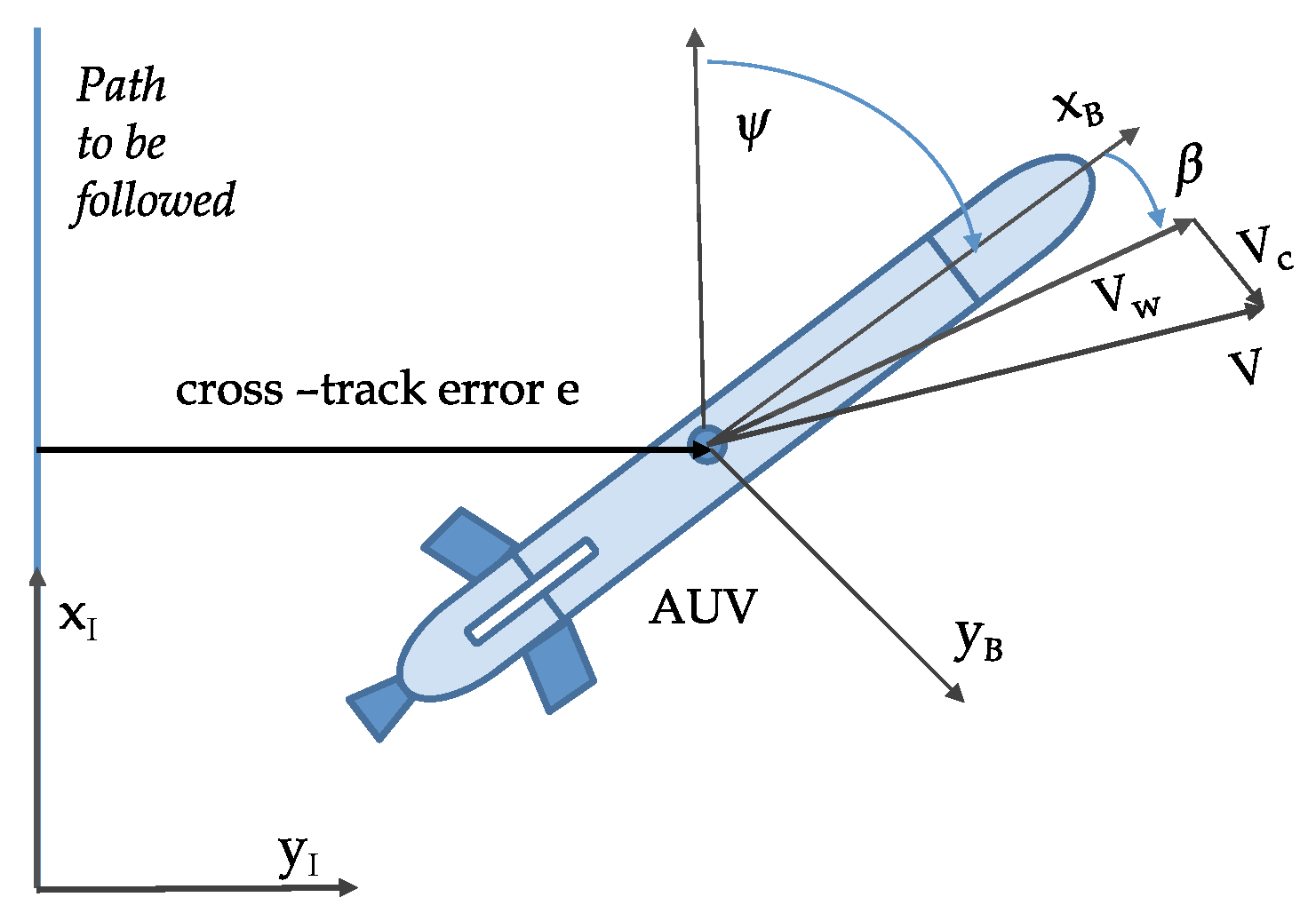
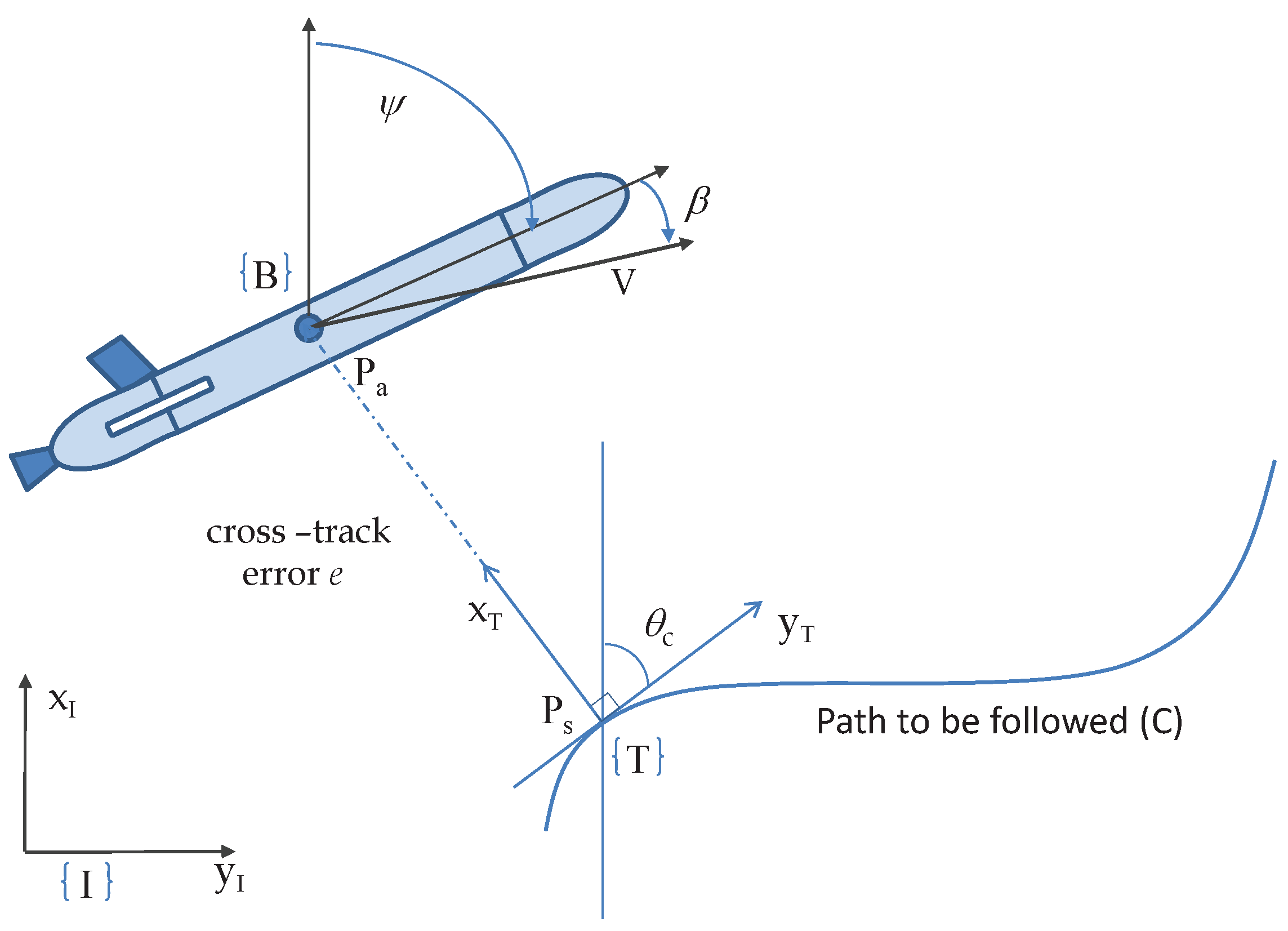
6. Path Following Problem
6.1. Path Following: Straight Lines Problem
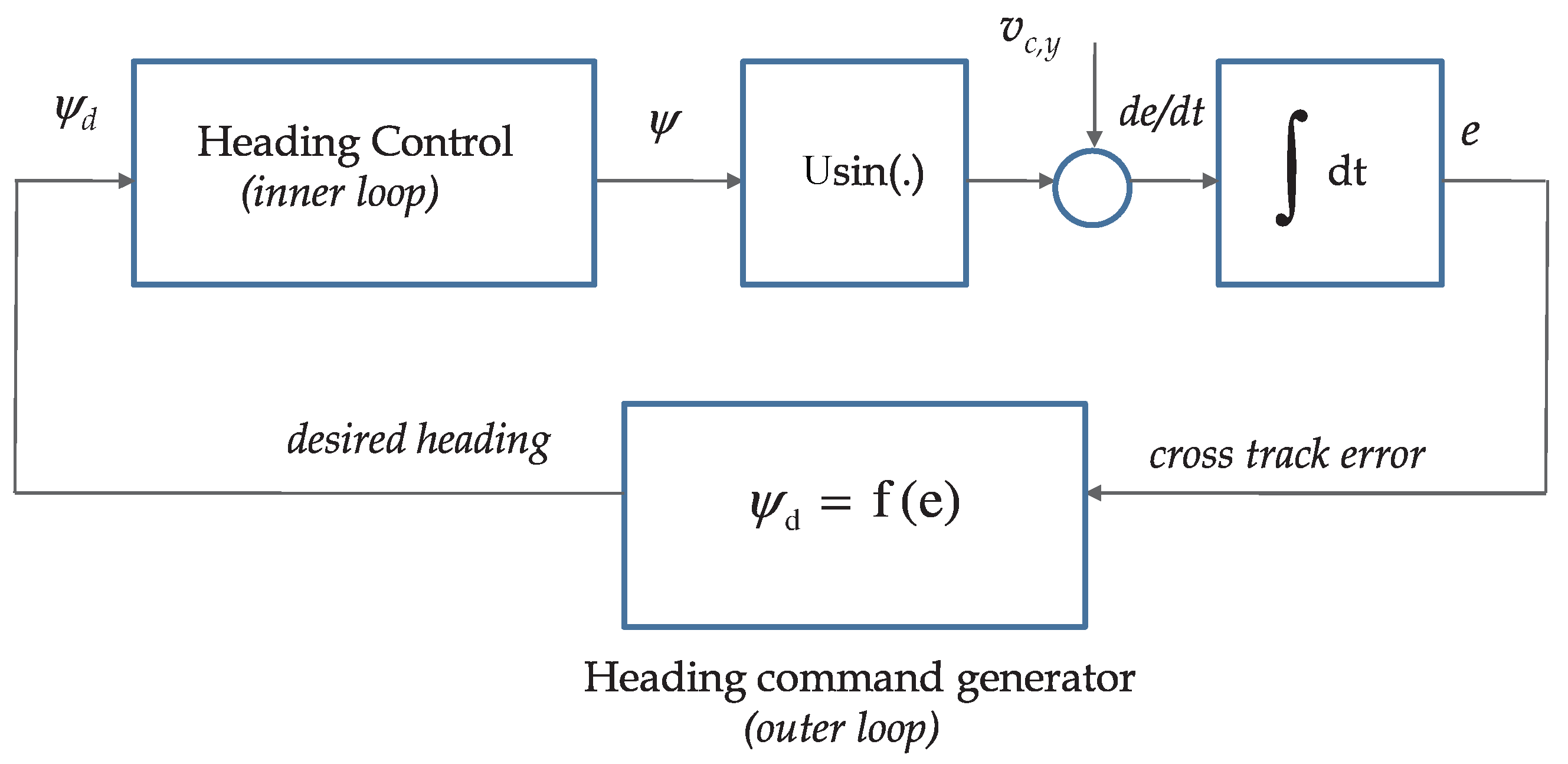
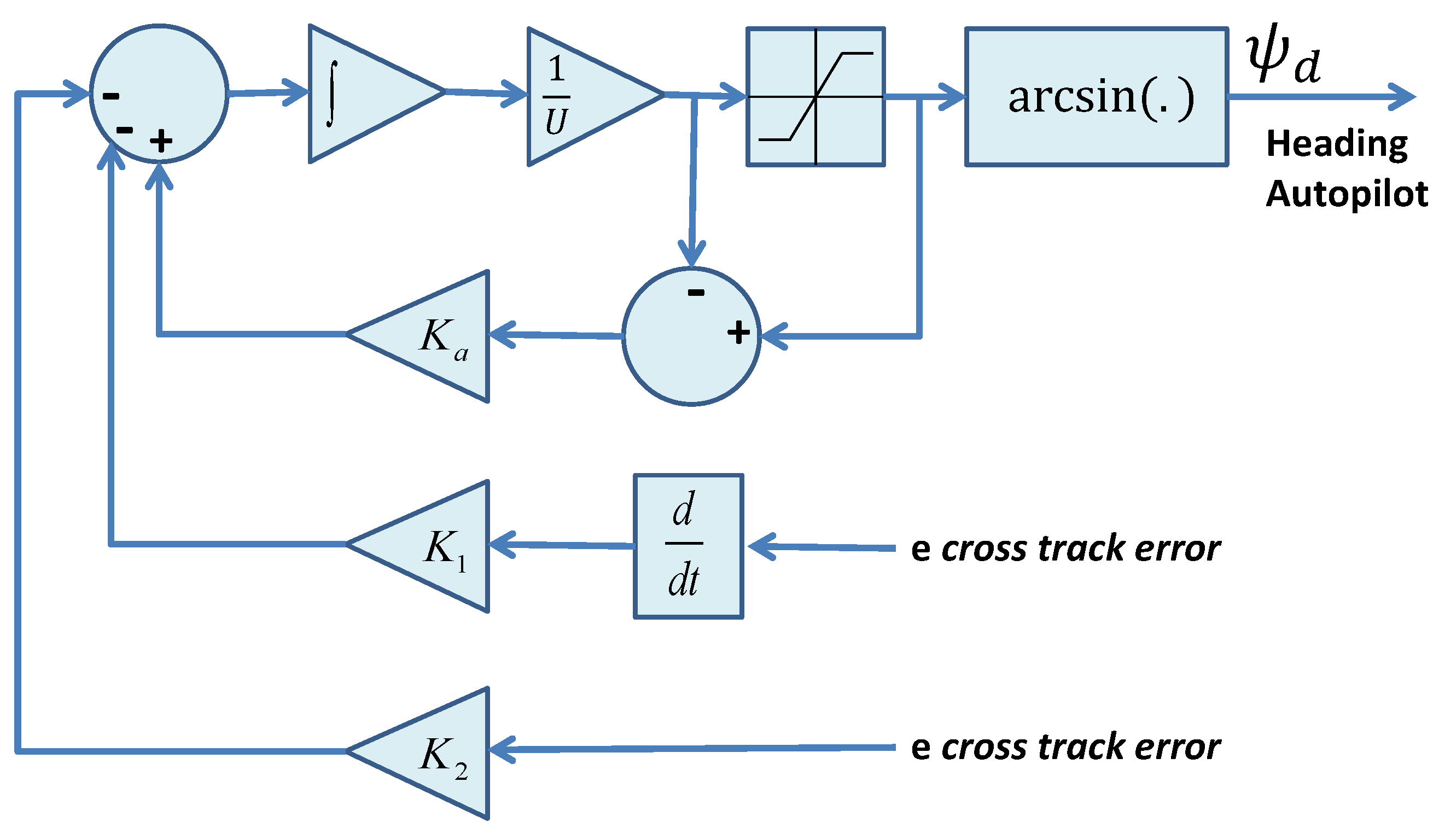
6.2. Path-Following Algorithm
6.3. Convergence of Cross-Track Error without the Inner Loop Dynamics
6.4. Inner-Loop Dynamics
6.5. Convergence: Realistic Inner-Loop Dynamics
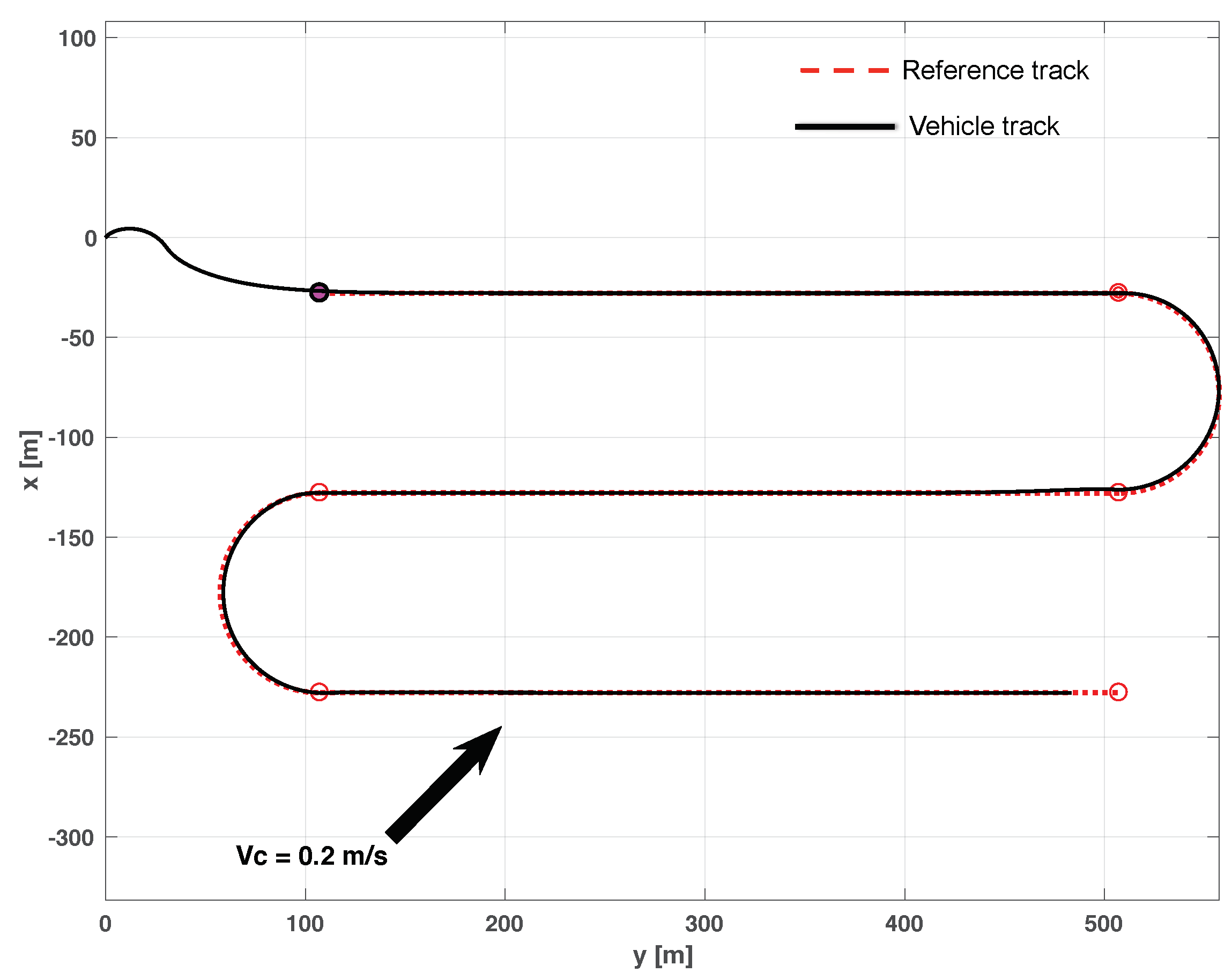
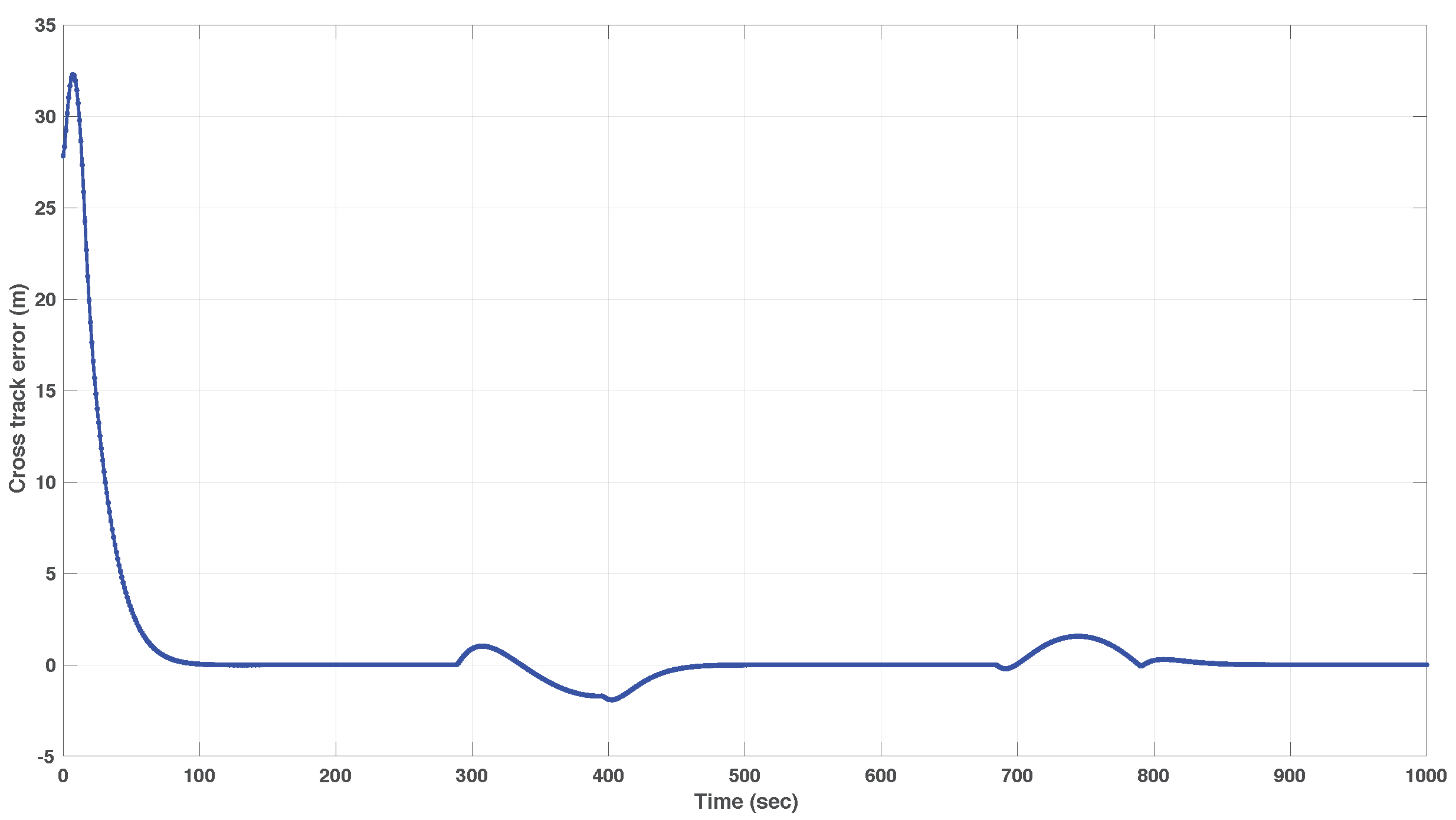
6.6. An Example
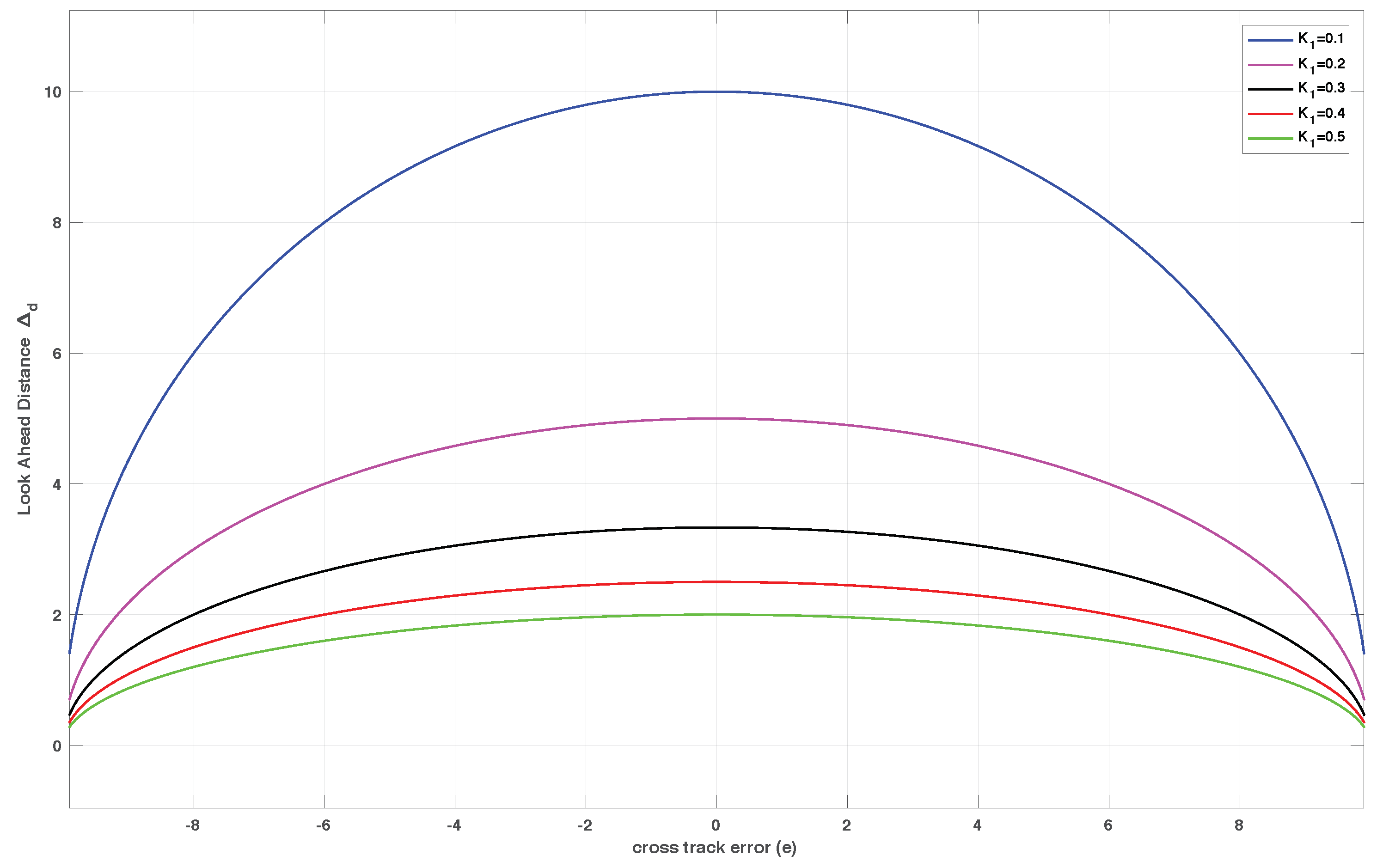
6.7. Relation between Outer-Loop Path Following and Using a Variable Look-Ahead Visibility Distance Line-of-Sight Guidance
7. Path Following Problem: Arcs
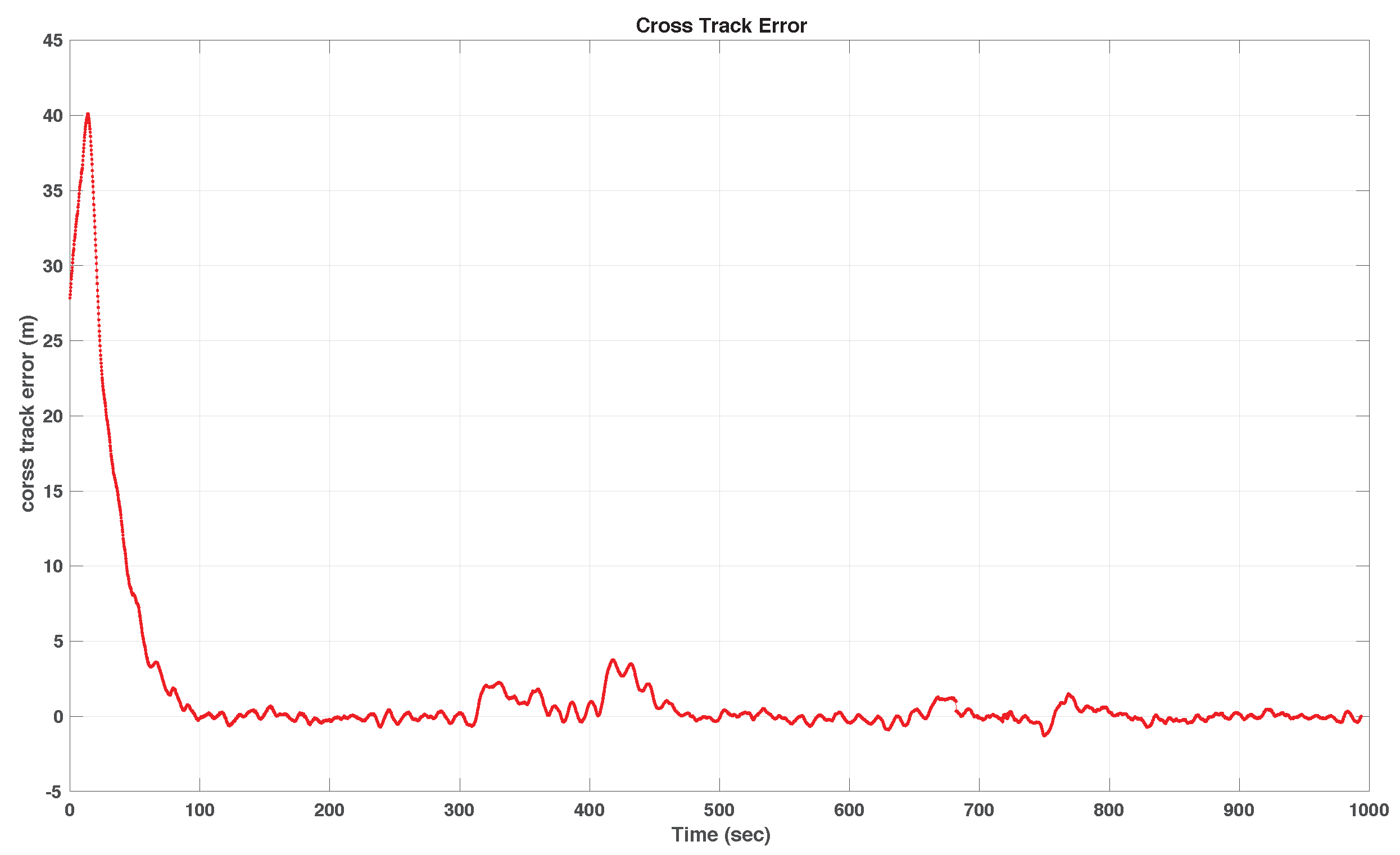
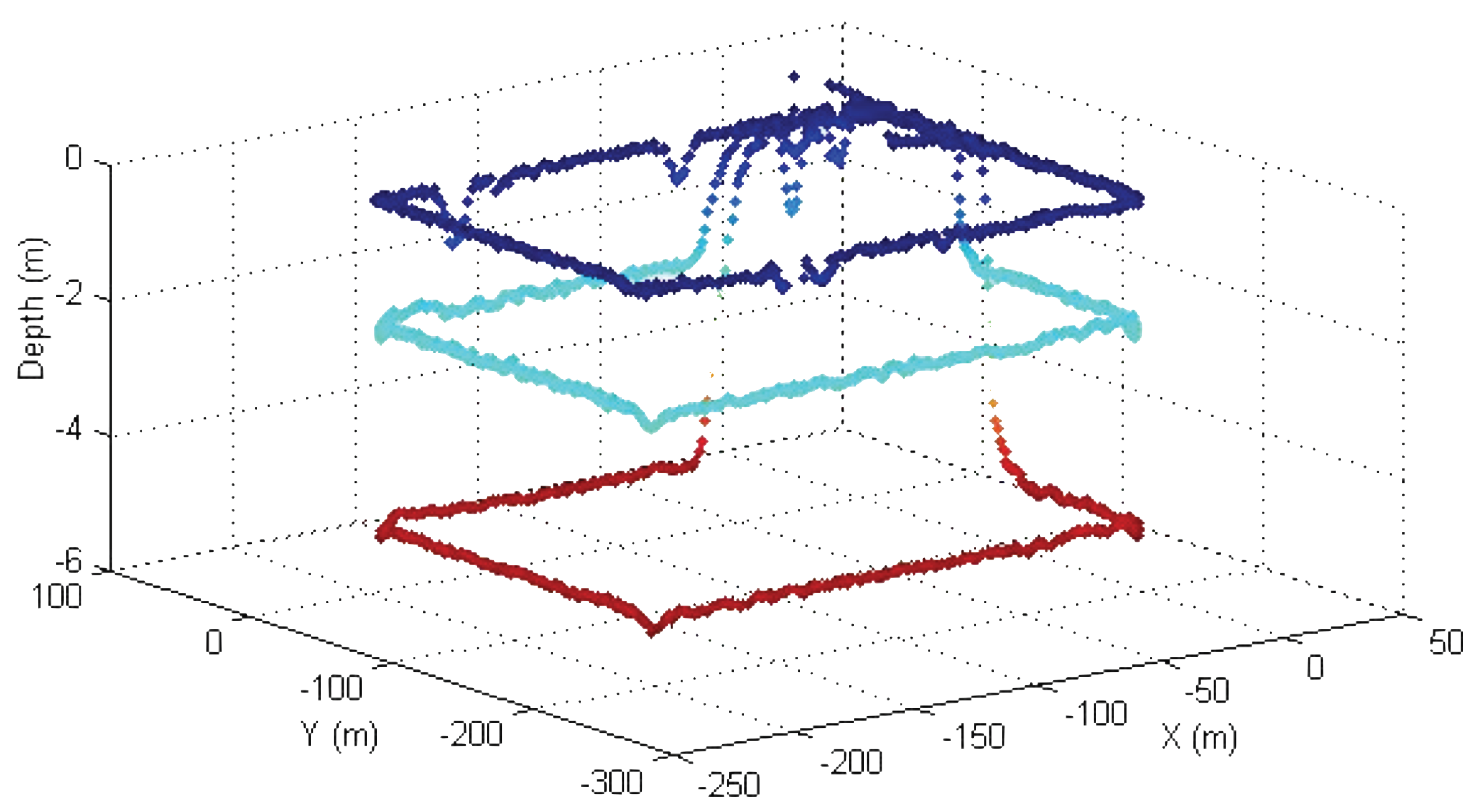
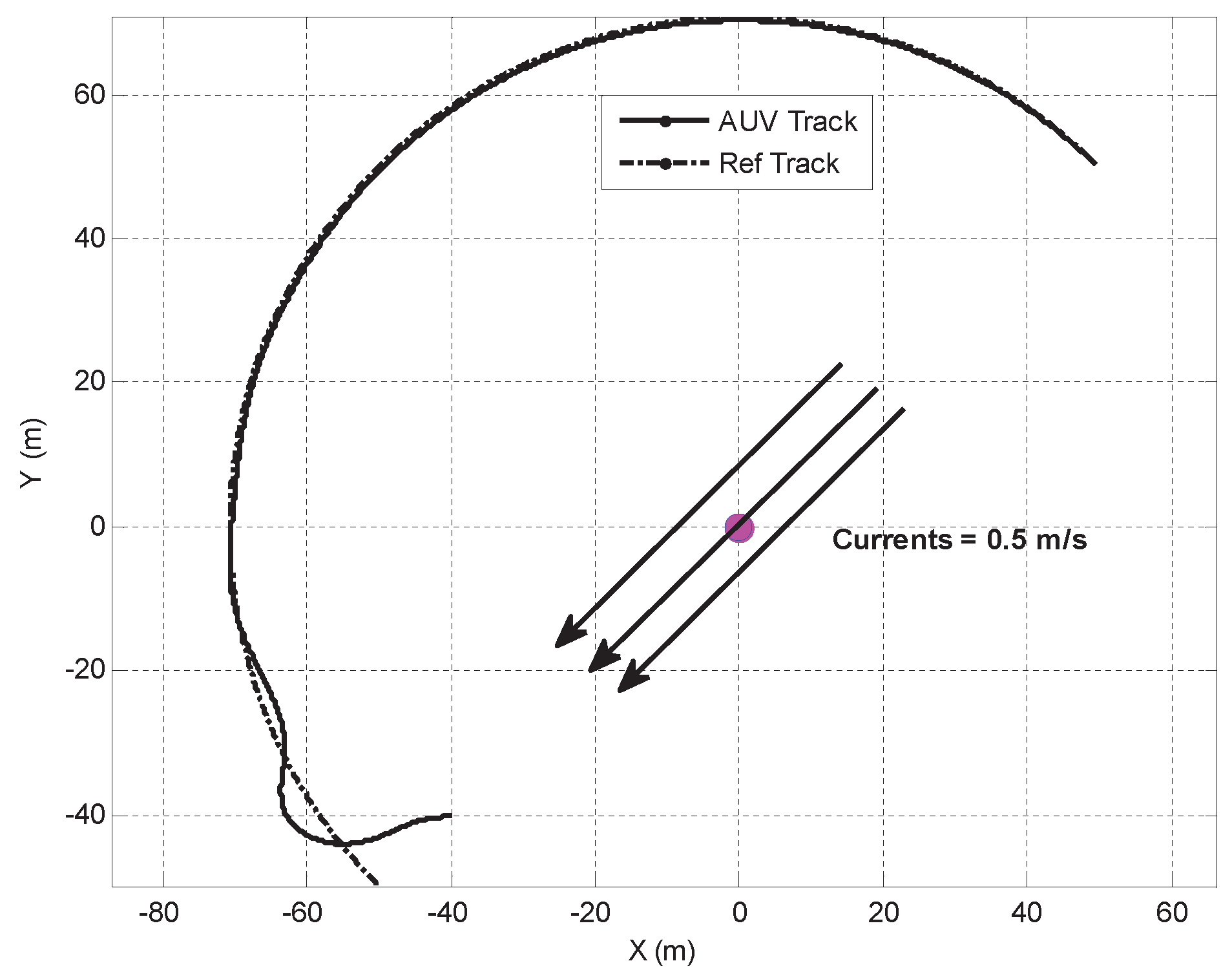
8. Implementation and Field Test Results
9. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Vehicle Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m = 17 kg | kg·m | |
|---|---|---|
| kg | kg | kg·m |
| kg/s | kg/s | kg·m/s |
| kg/m | kg/m | kg·m |
| Physical Parameters | |
|---|---|
| Vehicle Speed | : m/s |
| Reynolds Number | : |
| Sea Water Density | : 1025 kg/m |
| Vehicle Parameters | |
| Length | : m |
| Center of mass | : m (w.r.t body geometric axis) |
| Center of Buoyancy | : m (w.r.t body geometric axis) |
| Weight (W) | : 53 × 9.8 kgf |
| Buoyancy (B) | : 53.4 × 9.8 kgf |
| Hydrodynamic Parameters | |
| Moments Coeff. | Force Coeff. |
| = kg·m/s | = kg·m/s |
| = kg·m/s | = kg·m/s |
| = kg·m/s | = kg/s |
| = kg·m | = kg·m |
| = kg·m | = kg |
References
- Aguiar, A.P.; Dacic, D.B.; Hespanha, J.P.; Kokotovic, P. Path-Following or Reference-Tracking? An Answer relaxing the limits to performance. In Proceedings of the 5th IFAC Symposium on Intelligent Autonomous Vehicles (IAV), Lisbon, Portugal, 5–7 July 2004. [Google Scholar]
- Aguiar, A.P.; Hespanha, J.; Kokotovic, P. Path-Following for Non-Minimum Phase Systems Removes Performance Limitations. IEEE Trans. Autom. Control 2005, 50, 234–239. [Google Scholar] [CrossRef] [Green Version]
- Aguiar, A.P.; Hespanha, J. Trajectory-Tracking and Path-Following of Underactuated Autonomous Vehicles with Parametric Modeling Uncertainty. IEEE Trans. Autom. Control 2007, 52, 1362–1379. [Google Scholar] [CrossRef] [Green Version]
- Encarnacao, P.; Pascoal, A. 3D path following for autonomous underwater vehicle. In Proceedings of the 39th IEEE Conference on Decision and Control (Cat. No.00CH37187), Sydney, Australia, 12–15 December 2000; Volume 3, pp. 2977–2982. [Google Scholar]
- Indiveri, G.; Zizzari, A.A. Kinematics Motion Control of an Underactuated Vehicle: A 3D Solution with Bounded Control Effort. In Proceedings of the 2nd IFAC Workshop Navigation, Guidance and Control of Underwater Vehicles (2008), Killaloe, Ireland, 8–10 April 2008. [Google Scholar]
- Micaelli, A.; Samson, C. Trajectory Tracking for Unicycle-Type and Two-Steering-Wheels Mobile Robots; Roberts, G., Sutton, R., Eds.; Technical Report 2097; INRIA: Sophia-Antipolis, France, 1993; pp. 353–386. [Google Scholar]
- Samson, C. Path-following and time-varying feedback stabilization of a wheeled mobile robot. In Proceedings of the International Conference on Control, Automation, Robotics and Vision (ICARCV 92), Singapore, 16–18 September 1992; pp. RO-13.1.1–RO-13.1.5. [Google Scholar]
- Samson, C. Control of Chained Systems Application to Path Following and Time-Varying Point-Stabilization of Mobile Robots. IEEE Trans. Autom. Control 1995, 40, 64–76. [Google Scholar] [CrossRef]
- Altafini, C. Following a path of varying curvature as an output regulation problem. IEEE Trans. Autom. Control 2002, 47, 1551–1556. [Google Scholar] [CrossRef]
- Böck, M.; Kugi, A. Real-time Nonlinear Model Predictive Path-Following Control of a Laboratory Tower Crane. IEEE Trans. Control Syst. Technol. 2014, 22, 1461–1473. [Google Scholar] [CrossRef]
- Pascoal, A.; Silvestre, C.; Oliveira, P. Vehicle and Mission Control of Single Multiple Autonomous Marine Robots. In Advances in Unmanned Marine Vehicles; Roberts, G., Sutton, R., Eds.; IEE Contol Engineering Series; IET: London, UK, 2006; pp. 353–386. [Google Scholar]
- Ghabcheloo, R.; Aguiar, A.P.; Pascoal, A.C.S.; Kaminer, I.; Hespanha, J. Coordinated Path-Following in the presence of Communication Losses and Time Delays. SIAM J. Control Optim. 2009, 48, 234–265. [Google Scholar] [CrossRef] [Green Version]
- Pascoal, A.; Oliveira, P.; Silvestre, C.; Sebastiao, L.; Rufino, M.; Barroso, V.; Gomes, J.; Ayela, G.; Coince, P.; Cardew, M.; et al. Robotic ocean vehicles for marine science applications: The European ASIMOV project. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition. Conference Proceedings (Cat. No.00CH37158), Providence, RI, USA, 11–14 September 2000; Volume 1, pp. 409–415. [Google Scholar] [CrossRef]
- Kalwa, J.; Pascoal, A.; Ridao, P.; Birk, A.; Glotzbach, T.; Brignone, L.; Bibuli, M.; Alves, J.; Silva, M. EU project MORPH: Current Status After 3 Years of Cooperation Under and Above Water. IFAC-PapersOnLine 2015, 48, 119–124. [Google Scholar] [CrossRef]
- Al-Khatib, H.; Antonelli, G.; Caffaz, A.; Caiti, A.; Casalino, G.; de Jong, I.B.; Duarte, H.; Indiveri, G.; Jesus, S.; Kebkal, K.; et al. The widely scalable Mobile Underwater Sonar Technology (WiMUST) project: An overview. In Proceedings of the OCEANS 2015—Genova, Genova, Italy, 18–21 May 2015; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Børhaug, E.; Pavlov, A.; Panteley, E.; Pettersen, K. Straight Line Path Following for Formations of Underactuated Marine Surface Vessels. IEEE Trans. Control Syst. Technol. 2011, 19, 493–506. [Google Scholar] [CrossRef]
- Papoulias, F.A. Bifurcation Analysis of Line of Sight Vehicle Guidance using Sliding Modes. Int. J. Bifurc. Chaos 1991, 1, 849–865. [Google Scholar] [CrossRef]
- Burger, M.; Pavlov, A.; Bø rhaug, E.; Pettersen, K.Y. Straight Line Path Following for Formations of Underactuated Surface Vessels under Influence of Constant Ocean Currents. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 3065–3070. [Google Scholar]
- Burger, M.; Pavlov, A.; Pettersen, K.Y. Conditional Integrators for Path Following and Formation Control of Marine Vessels under Constant Disturbances. In Proceedings of the 8th IFAC Conference on Manoeuvring and Control of Marine Craft, Guaruja, Brazil, 16–18 September 2009. [Google Scholar]
- Moe, S.; Caharija, W.; Pettersen, K.; Schjolberg, I. Path following of underactuated marine surface vessels in the presence of unknown ocean currents. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 3856–3861. [Google Scholar] [CrossRef] [Green Version]
- Aguiar, A.P.; Pascoal, A.M.; Kaminer, I.; Dobrokhodov, V.; Hovakimyan, N.; Xargay, E.; Cao, C.; Ghabcheloo, R. Time-Coordinated Path Following of Multiple UAVs over Time-Varying Networks using L1 Adaptation. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]
- Sujit, P.; Saripalli, S.; Borges Sousa, J. Unmanned Aerial Vehicle Path Following: A Survey and Analysis of Algorithms for Fixed-Wing Unmanned Aerial Vehicles. IEEE Control Syst. Mag. 2014, 34, 42–59. [Google Scholar] [CrossRef]
- Breivik, M.; Fossen, T.I. Principles of Guidance-Based Path Following in 2D and 3D. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 627–634. [Google Scholar]
- Breivik, M.; Subbotin, M.V.; Fossen, T.I. Guided Formation Control for Wheeled Mobile Robots. In Proceedings of the 2006 9th International Conference on Control, Automation, Robotics and Vision, Singapore, 5–8 December 2006. [Google Scholar]
- Carona, R.; Aguiar, A.P. Control of Unicycle Type Robots: Tracking, Path Following and Point Stabilization. In Proceedings of the IV Jornadas de Engineharia Electronica e Telecomunicacoes e de Computadores, Lisbon, Portugal, 20–21 November 2008; pp. 180–185. [Google Scholar]
- Tayebi, A.; Rachid, A. Path Following Control Law for an Industrial Mobile Robot. In Proceedings of the 1996 IEEE International Conference on Control Applications, Dearborn, MI, USA, 15–18 September 1996; pp. 703–707. [Google Scholar]
- Park, S.; Deyst, J.; How, J. Performance and Lyapunov Stability of a Nonlinear Path Following Guidance Method. J. Guid. Control Dyn. 2007, 30, 1718–1728. [Google Scholar] [CrossRef]
- Breivik, M.; Fossen, T.I. Path Following for Marine Surface Vessels. In Proceedings of the Oceans ’04 MTS/IEEE Techno-Ocean ’04 (IEEE Cat. No.04CH37600), Kobe, Japan, 9–12 November 2004; pp. 2282–2289. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Hoboken, NJ, USA, 2001. [Google Scholar]
- Maurya, P.; Aguiar, A.P.; Pascoal, A. Marine Vehicle Path Following Using Inner-Outer Loop Control. In Proceedings of the 8th IFAC International Conference on Manoeuvring and Control of Marine Craft, Guaruja, Brazil, 16–18 September 2009. [Google Scholar] [CrossRef]
- Maurya, P.; Desa, E.; Pascoal, A.; Barros, E.; Navelkar, G.; Madhan, R.; Mascarenhas, A.; Prabudesai, S.; Afzalpurkar, S.; Gouveia, A.; et al. Control of the Maya AUV in the Vertical and Horizontal Planes: Theory and Practical Results. In Proceedings of the 7th Conference on Manoeuvring and Control of Marine Craft (MCMC2006), Lisbon, Portugal, 20–22 September 2006. [Google Scholar]
- Aage, C.; Smitt, L. Hydrodynamic manoeuvrability data of a flatfish type AUV. In Proceedings of the Oceans Engineering for Today’s Technology and Tomorrow’s Preservation (OCEANS ’94), Brest, France, 13–16 September 1994; Volume 3, pp. III/425–III/430. [Google Scholar] [CrossRef] [Green Version]
- De barros, E.; Dantas, J.; Pascoal, A.; de Sa, E. Investigation of Normal Force and Moment Coefficients for an AUV at Nonlinear Angle of Attack and Sideslip Range. IEEE J. Ocean. Eng. 2008, 33, 538–549. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control System: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics AS: Trondheim, Norway, 2002. [Google Scholar]
- Craig, J.J. Introduction to Robotics: Mechanics and Control; Includes bibliographies and index; Addison-Wesley Pub. Co.: Reading, MA, USA, 1986. [Google Scholar]
- Fossen, T.I. Nonlinear Modeling and Control of Underwater Vehicles. Ph.D. Thesis, Department of Engineering Cybernetics, Norwegian University of Science and Technology, Trondheim, Norway, 1991. [Google Scholar]
- Técnico Lisboa. MEDUSA. Available online: http://dsor.isr.ist.utl.pt/vehicles/medusa/ (accessed on 30 March 2022).
- Abreu, P.C. Positioning and Navigation Systems for Robotic Underwater Vehicles. Master’s Thesis, Instituto Superior Tecnico, University of Lisbon, Lisbon, Portugal, 2014. [Google Scholar]
- Madhan, R.; Desa, E.; Prabhudesai, S.; Sebastiao, L.; Pascoal, A.; Desa, E.; Mascarenhas, A.; Maurya, P.; Navelkar, G.; Afzulpurkar, S.; et al. Mechanical Design and Development Aspects of a Small AUV MAYA. In 7th IFAC Conference on Manoeuvring and Control of Marine Craft; IFAC: Lisbon, Portugal, 2006; pp. 1–6. [Google Scholar]
- Jalving, B. The NDRE-AUV Flight Control System. IEEE J. Ocean. Eng. 1994, 19. [Google Scholar] [CrossRef]
- Sontag, E. Smooth stabilization implies coprime factorization. IEEE Trans. Autom. Control 1989, 34, 435–443. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Araujo, D.; Zavala-Rio, A.; Fantoni, I.; Salazar, S.; Lozano, R. Global stabilization of the PVTOL aircraft with lateral force coupling and bounded inputs. Int. J. Control 2010, 7, 1427–1441. [Google Scholar] [CrossRef]
- Panteleyt, E.; Ortega, R. Cascaded Control of Feedback Interconnected Nonlinear Systems: Application to Robots with AC Drives. Automatica 1997, 33, 1935–1947. [Google Scholar] [CrossRef]
- Vanni, F. Coordinated Motion Control of Multiple Autonomous Underwater Vehicles. Master’s Thesis, Instituto Superior {Técnico}, Lisbon, Portugal, 2007; pp. 46–50. [Google Scholar]
- Maurya, P.; Navelkar, G.; Madhan, R.; Afzalpurkar, S.; Prabhudesai, S.; Desa, E.; Pascoal, A. Navigation and path following guidance of the Maya AUV: From concept to practice. In Proceedings of the 2nd International Conference on Underwater System Technology: Theory and Applications, Bali, Indonesia, 4–5 November 2008. [Google Scholar]
- Kaminer, I.; Pascoal, A.; Khargonekar, P.; Coleman, E. A Velocity Algorithm for the Implementation of Gain-Scheduled Controllers. Automatica 1995, 31, 1185–1191. [Google Scholar] [CrossRef]
- Bengtsson, G. Output regulation and internal models: A frequency domain approach. Automatica 1977, 13, 333–345. [Google Scholar] [CrossRef]
- Dorf, R.; Bishop, R. Modern Control Systems; Pearson Prentice Hall: Hoboken, NJ, USA, 2008. [Google Scholar]
- Kawato, M. Internal models for motor control and trajectory planning. Curr. Opin. Neurobiol. 1999, 9, 718–727. [Google Scholar] [CrossRef]











| Parameters | Value |
|---|---|
| Speed U | 1 m/s |
| y-component of current | 0.1 m/s |
| saturation | 0.8 |
| Parameters used for | with |
| outer loop design | and |
| damping factor | 0.8 |
| 0.083 | |
| 0.99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maurya, P.; Morishita, H.M.; Pascoal, A.; Aguiar, A.P. A Path-Following Controller for Marine Vehicles Using a Two-Scale Inner-Outer Loop Approach. Sensors 2022, 22, 4293. https://doi.org/10.3390/s22114293
Maurya P, Morishita HM, Pascoal A, Aguiar AP. A Path-Following Controller for Marine Vehicles Using a Two-Scale Inner-Outer Loop Approach. Sensors. 2022; 22(11):4293. https://doi.org/10.3390/s22114293
Chicago/Turabian StyleMaurya, Pramod, Helio Mitio Morishita, Antonio Pascoal, and A. Pedro Aguiar. 2022. "A Path-Following Controller for Marine Vehicles Using a Two-Scale Inner-Outer Loop Approach" Sensors 22, no. 11: 4293. https://doi.org/10.3390/s22114293
APA StyleMaurya, P., Morishita, H. M., Pascoal, A., & Aguiar, A. P. (2022). A Path-Following Controller for Marine Vehicles Using a Two-Scale Inner-Outer Loop Approach. Sensors, 22(11), 4293. https://doi.org/10.3390/s22114293