1. Introduction
Source localization is a common topic in various areas [
1,
2]. A variety of positioning methods for different applications have been extensively studied recently. For example, the autonomous driving system uses active sources to locate the vehicle [
3]; radio Frequency technologies are engaged for indoor localization [
4]; a virtual array by moving unmanned aerial vehicles is applied to wireless communication systems [
5]. However, for some applications, such as sonar, radar, and speaker localization, utilizing a passive sensor array is the most typical positioning way. Therefore, there is great interest in passive sensor array signal processing for achieving excellent positioning performance [
6]. According to the distance between the array and the source, most localization algorithms divide the problem into far-field and near-field scenarios [
7]. These two cases have each been investigated intensively for decades [
8,
9,
10].
For the far-field scenario, the array signal processing methods often focus on the direction of the arrival (DOA) estimation problem. Among the DOA estimation approaches, conventional beamforming (CBF) [
11], also known as the delay and sum algorithm, is the most common and robust. However, it is limited by the Rayleigh threshold, resulting in low resolution and high-level sidelobes, making it challenging to distinguish adjacent sources and detect weak targets [
12]. Consequently, several high-resolution beamforming approaches have been presented, including the minimum variance distortion-free response (MVDR) [
13], the multiple signal classification (MUSIC) [
14], and the estimation of signal parameters via rotational invariance techniques (ESPRIT) [
15]. Although the mentioned approaches have narrow beamwidths and low sidelobe levels, their performance depends on the accurate estimation of the data covariance matrix. Therefore, they require many samples of signals from sensors to compute the covariance matrix [
16]. Simultaneously, these methods are sensitive to signal model mismatches and need the sources to be uncorrelated. Recently, some novel methods based on sparse signal recovery have been proved to outperform the above techniques in terms of resolution and robustness, which is also suitable for a few snapshots and correlated sources [
17,
18]. The compressive sensing (CS) beamforming method is typical [
19]. However, these methods often rely on the dense grid to guarantee the required estimation precision, which is time-consuming.
For the near-field scenario, both DOA and source range need to be jointly estimated. Some far-field DOA estimation methods are extended to locate near-field sources, such as MUSIC-based [
20] and ESPRIT-based methods [
21]. These approaches and their variants have the same limitations as the far-field DOA estimation; they need the sources to be uncorrelated and require many snapshots. On the other hand, some time-frequency techniques, such as Wigner–Ville distributed method [
22] and the discrete fractional Fourier transform method [
23], are engaged in near-field source parameter estimation. They can deal with one snapshot, coherent source, and mixed near-field and far-field sources conditions. However, these algorithms cannot meet the requirements of high resolution. With the sparse signal recovery-based methods showing outstanding performance in far-field localization, significant interest has been driven to apply sparse signal recovery-based methods to near-field localization [
24]. However, these methods need to generate a grid not only for the possible DOAs but also for the possible ranges, which costs higher computation than that in DOA estimation. Moreover, suppose the source position is not precisely located on the grid, which is common in practical applications. In that case, a basis mismatch will occur, and these grid-based methods’ performance will degrade [
25,
26].
In summary, the challenges in source localization can be classified into the following aspects. On the one hand, we want the approach to be a robust high-resolution approach with coherent sources and few snapshots and applicable for both near-field and far-field localization. On the other hand, we desire the algorithm to have low calculation. These requirements are common in practice. Therefore, it is vital to propose a source localization method to solve these problems.
From the methods mentioned above, we can draw the following two conclusions. Firstly, sparse signal recovery-based methods have many advantages except for the high computational cost. Secondly, the time-frequency techniques can deal with the mixed near-field and far-field sources on the condition of one snapshot and correlated sources, but it is limited to the resolution. Motivated by this, we use a novel sparse time-frequency representation technique named variational mode decomposition (VMD) to source the localization. VMD is a nonstationary signal analysis method that can adaptively decompose a multicomponent real-valued signal into several subsignals [
27,
28]. Since array signals are always complex-valued for performing the phase of the different array elements, standard VMD cannot be applied directly. Recently, a complex VMD (CVMD) method was proposed [
29], which provides the opportunity for applying VMD to array signal processing. In particular, we have proposed a modified CVMD method in [
30], which gives a natural extension for VMD to the complex domain. This paper applies the modified CVMD in far-field and near-filed sources localization, aiming to yield great performance with small computation.
The rest of this paper is organized as follows. Firstly, the signal model is introduced in
Section 2.
Section 3 reviews the popular existing CS-based method and presents the CVMD method, which will be applied in the proposed algorithm.
Section 4 further formulates the problem and proposes the CVMD-based source localization method. Then, we validate our CVMD-based algorithm in various conditions in
Section 5. At last, the conclusion is made in
Section 6.
2. Signal Model
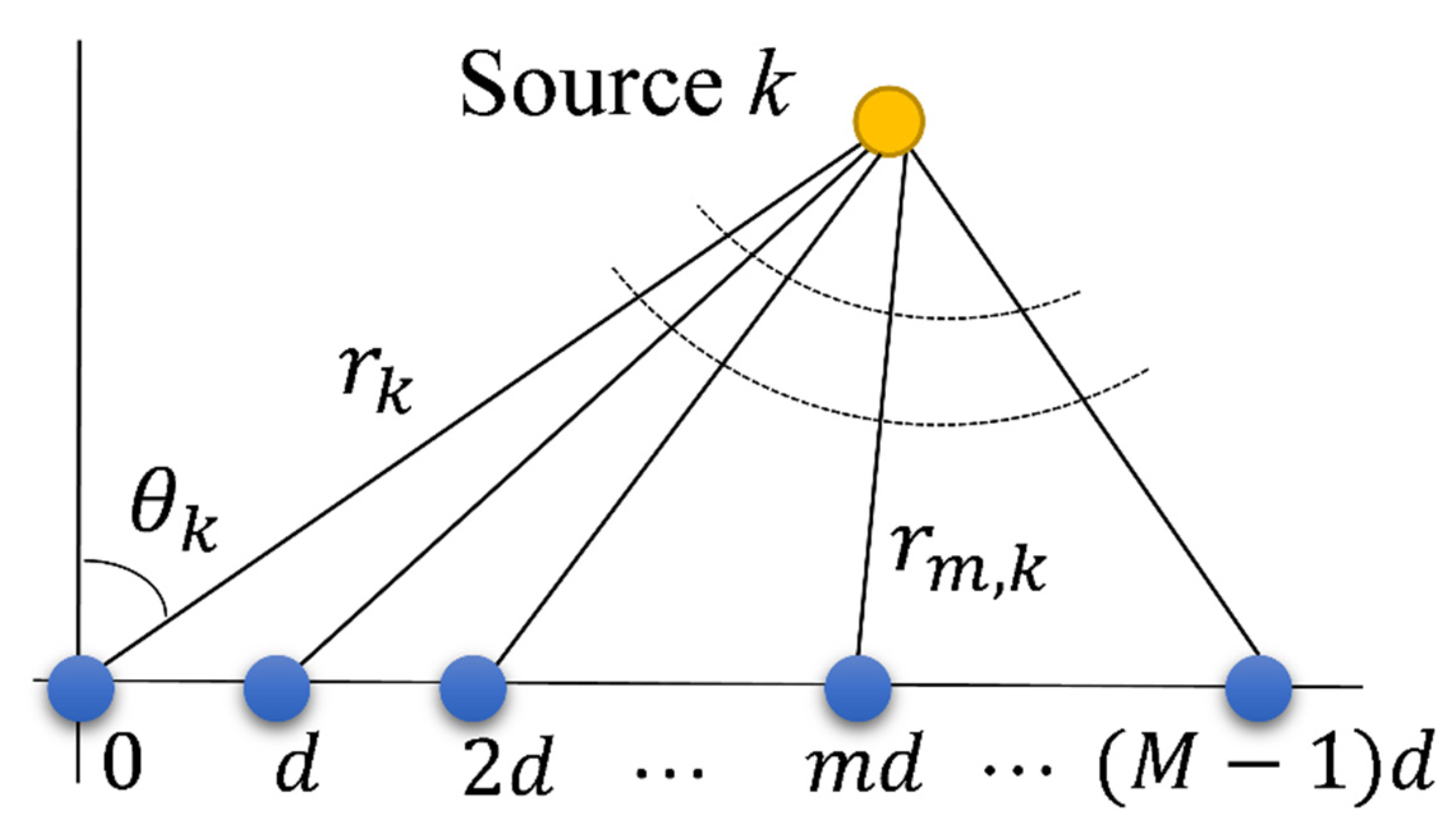
Suppose
sensor elements space in a uniform linear array (ULA), as shown in
Figure 1. The interelement spacing is
. Assume that
(near-field or far-field) narrowband signal sources impinge on the ULA. The signal received by the
m-th (
) sensor at one snapshot can be expressed as
where
represents the distance between the
m-th sensor and the
k-th source,
is the range from the
k-th source to the zeroth sensor, which is set as a phase reference,
is the signal radiated by the
k-th source and received by the zeroth sensor,
denotes the wavelength of the source signal, and
means the additive noise. In this paper, we suppose the array element spacing
d is 1/2 of the wavelength
.
In most sources’ localization approaches, the phase difference between the
m-th sensor and the zeroth sensor is simplified as two terms of Taylor expansion as
When the range
, and
denotes array aperture, the
k-th source is regarded as a near-field source. When the range
is beyond
, the source is regarded as a far-field source. For the far-field sources, the phase difference
can be further simplified as
Therefore, only the source direction needs to be estimated in the far-field scene.
In our proposed method, we do not make any simplification of the signal model. The exact spatial propagation geometry in
Figure 1 and the exact expression as Equations (1) and (2) are utilized for both far-field and near-field sources localization. Specifically, we use the same model for near-field and far-field scenes. The only difference between the near-field and the far-field source is that both range and direction are required to be estimated in the near-field scenario, while only DOA needs to be solved in far-field sources localization.
3. Related Work and Background
3.1. Related Work
Existing approaches for source localization with passive sensor array can be divided into three categories. One is the traditional beamforming method based on the Fourier theory, such as CBF. These methods have a limitation on resolution. The second type is the high-resolution algorithm based on the covariance matrix, such as MUSIC and MVDR. These methods cannot deal with the correlated sources. The last category is based on the sparse signal processing theory. These algorithms have advantages in resolution, robustness, and many other aspects. Especially the CS-based localization approach is considered the most representative because of its widespread use and good acceptance in the community. Hence, we introduce the CS-based method and mainly compare it with our proposed method.
The source localization problem in
Section 2 can be regarded as an inverse problem, which can be solved by the existing CS method. Equation (1) can be rewritten as
where
denotes the array manifold,
is the so-called steering,
is the source signals, and
is the additive noise matrix.
For the near-filed or the mixed near and far-field cases, the
can be described as
where
. Accordingly, the problem can be described as follows: given the measurements
, the unknown parameters
and
, where
needs to be estimated. That is a typical inverse problem. The existing CS-based algorithm uses sparse reconstruction to solve the inverse problem. Firstly, a grid is made by every possible pair of range and theta. Suppose the
k-th pair of range and theta is marked as
and
. A known matrix with steering vectors corresponding to each potential source location is then constructed as
where
denotes the grid size,
, and
. Then the inverse problem can be solved by
where
is the sparsity regulating parameter, and
represents the signal amplitude related to the possible DOAs. Due to the sparse hypothesis, most of the values in
are zero.
Although the near-field model suits both near-field and far-field sources, the CS-based method often uses the simplified model for pure far-field source localization because of the smaller computation. For the far-filed scene, the
can be described as
where
. The grid is made by every possible theta. The known matrix with steering vectors corresponding to each potential source direction as its columns can be described as
Similar to the near-filed case, the inverse problem can be solved by
Here, represents the signal amplitude related to the possible DOAs, where most values are zero.
The CS-based method can achieve outstanding performance in resolution and robustness. Nevertheless, it requires generating a dense grid to assure the needed estimation precision, which is time-consuming.
3.2. Complex Variational Mode Decomposition
This paper plans to use CVMD to solve the above inverse problem. Here, we give a brief introduction to the VMD and CVMD methods. VMD is a novel solution to inverse problems [
23], often used in analyzing nonstationary time signals, and CVMD is the extension of VMD to complex-valued data [
26].
Suppose we have a multicomponent real-valued signal series . The VMD method can decompose the signal into a set of subsignals called band-limited intrinsic mode functions (IMFs). If we set and use VMD to it, three subsignals , and can be separated and recovered.
Specifically, the VMD method is implemented by the constrained variational problem:
where the sign
denotes the convolution operation,
are IMFs to be solved,
denotes the center frequencies of the IMFs, and the decomposition number
is supposed to know as a priori.
When it comes to a complex-valued sequence, the standard VMD method is not applicable. CVMD gives a preprocessing to the complex-valued data, then the standard VMD can be applied, and finally, the complex-valued IMFs are obtained. Take the multicomponent complex-valued signal series for example, three complex-valued subsignals , , and can be separated and recovered using CVMD.
4. Near-Field and Far-Field Sources Localization Algorithm
4.1. Problem Formulation
Though the VMD and CVMD are often applied in analyzing time-domain signals, we extend them to the array signal processing. To further establish the contact between CVMD methods to the source localization topic, we rewrite Equation (1) as
where
. It can be seen that the measurement
is a multicomponent complex-valued signal, where the sensor index
is similar to the time index in the time domain. Thus, the signal model can be analyzed like the time series.
According to the signal model in
Section 2, the
part, which represents the
k-th source received by the sensor array, is similar to the frequency-modulated signal model. Moreover, its instantaneous frequency
is monotonically increasing with the index
increasing. Suppose the array elements spacing
is half of the signal wavelength
. Then the spatial frequency range is between
to
, where
denotes the array aperture. Consequently, the bandwidth of the signal is
.
Since the frequency-modulated signal is band-limited, it can be regarded as a subsignal named band-limited complex IMF in the CVMD algorithm. Thus, the inverse problem for the source localization has a different solution. We can use the CVMD method to decompose the measurements to obtain the possible subsignal . After decomposition, the parameters and can be estimated by fitting the phase of the IMF with the function . The signal amplitude can be obtained by calculating the amplitude of the IMF. In brief, the proposed CVMD-based source localization algorithm has two processes: decomposition and model fitting.
4.2. Decomposition
To decompose the array measurements into several IMFs, we use the modified CVMD method. The decomposition process in modified CVMD contains several steps: signal extension, upsampling, modulation, standard VMD, demodulation, and downsampling. The first three steps can be regarded as the signal preprocessing procedure, aiming to generate the real-valued data from the original complex-valued data for the standard VMD. The last two steps, demodulation and downsampling, are applied to remove the modulation and upsampling and finally obtain the complex-valued decomposition result of the original data.
Suppose we have the measurements by
sensors at one snapshot as the signal model in
Section 2, described as
, where
. Firstly, we upsample the measurements
through sinc interpolation to increase the sampling rate. Before interpolation,
are extended by mirroring the signal by half the length on each side. This operation is to reduce the boundary effect of the sinc interpolation. Then the discrete sinc interpolation algorithm is used to double sample the data. Next, the mirror extension part is removed. Finally, the upsampled result
, where
, is obtained.
For the original measurements, the spatial sampling rate, defined as
, is 2. After double sampling, the spatial sampling rate of
becomes 4.
is then shifted by multiplying exponential factors
as follows
The modulated result
is now an analytical signal. A real-valued signal can be deduced without losing any information from the original analytical signal as
where
denotes taking the real part of the complex-valued data.
Since
is real-valued, the VMD method can be used directly through the constrained variational problem as Equation (12). To be specific, VMD solves the problem in the spectral domain. Suppose the discrete Fourier transform (DFT) of the
k-th IMF is expressed as
and the
in the spectral domain is described as
. The problem is solved by updating the
for all
until convergence, as follows
where
n denotes the
n-th iteration,
denotes the DFT of Lagrangian multipliers,
represents the balancing parameter of the data-fidelity constraint, and the
is calculated at the center of gravity of the corresponding mode’s power spectrum as
Then, the IMFs
are obtained from the real part of the inverse DFT of the final
. Consider that the decomposition number is
. Through the optimization, the mode decomposition of
can be expressed as
where
denotes the
k-th IMF corresponding to
, and
describes the residual.
After VMD, we use the Hilbert transform to obtain the corresponding analytic
k-th IMF as
where
denotes the Hilbert transform operation.
Note that the obtained IMFs have been upsampled and modulated. Hence, the final complex IMFs can be obtained by demodulation and downsampling. The demodulated results can be obtained by multiplying exponential factors
as
At last, we can acquire the final
k-th complex BLIMF
corresponding to the origin complex data
by downsampling as below
4.3. Model Fitting
After decomposition, we obtain a set of IMFs , where and . These IMFs can correspond to the subsignals in Equation (13). Thus, we can estimate the and parameters by fitting the phase of with the function . We can estimate the from the average amplitude of , .
The phase of the complex-valued signal
can be obtained by
where
defines the imaginary part of the complex-valued data, and the
operation represents the phase unwrapping algorithm. The applied unwrapping algorithm can be realized as: whenever the jump between successive phase angles is greater than or equal to
π radians, we shift the phase angle by increasing an integer multiple of
until the jump is less than
[
31]. Then the calculation result
is fitted with the phase model in Equations (1) and (2) through the optimization:
This fitting problem can be easily solved by the nonlinear least square algorithms [
32], and then the parameters
and
can be obtained. Furthermore, the source signal
can be estimated by
Finally, we obtain the k-th source’s location parameters: range , direction , and its amplitude . We can classify the far-field and near-field sources from the value of . If the is beyond , the source is regarded as a far-field one. In that case, we only focus on the DOA of the source. Otherwise, the source is considered near-field, and both range and direction are required to describe the source’s position.
6. Conclusions
This paper presents a near-field and far-field source localization algorithm with a uniform linear array. The algorithm is motivated by the novel time-domain nonstationary signal processing method named complex variational mode decomposition (CVMD). The CVMD algorithm provides a different solution to inverse problems. Hence, we extend the CVMD method to the source localization problem to yield great performance with low computation.
Serval experiments verify the effectiveness of the proposed algorithm. Compared with the traditional localization techniques based on the data covariance matrix, the proposed method shows advantages in dealing with coherent sources and the snapshots absence condition. Compared with the methods based on sparse signal recovery, such as compressive sensing, our proposed algorithm requires much lower computing time when yielding a similar localization performance on resolution, detection, and classification of near and far-field sources.
The shortcoming is that our method requires the number of sources to be predefined. Many successful algorithms, such as MUSIC, suffer from the same drawback. In practical situations, we usually have some prior information. Moreover, there are many preprocessing techniques to estimate the number of sources, which will help us improve the current method. Another shortcoming is that the decomposition may have multiple solutions. This problem can also be improved by prior information.
Furthermore, extending the CVMD from the time domain to the spatial domain brings benefits not only to source localization but also to other array signal-processing purposes. For example, we can use the CVMD for near-field noise suppression because the method can decompose the array measurements into several subsignals corresponding to the potential sources at different locations. Thus, we can extend the proposed CVMD-based method to more array signal processing applications in the future.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}