
Inertial Data-Based AI Approaches for ADL and Fall Recognition

 ,
,  ,
, 

Abstract
:1. Introduction
2. Methods
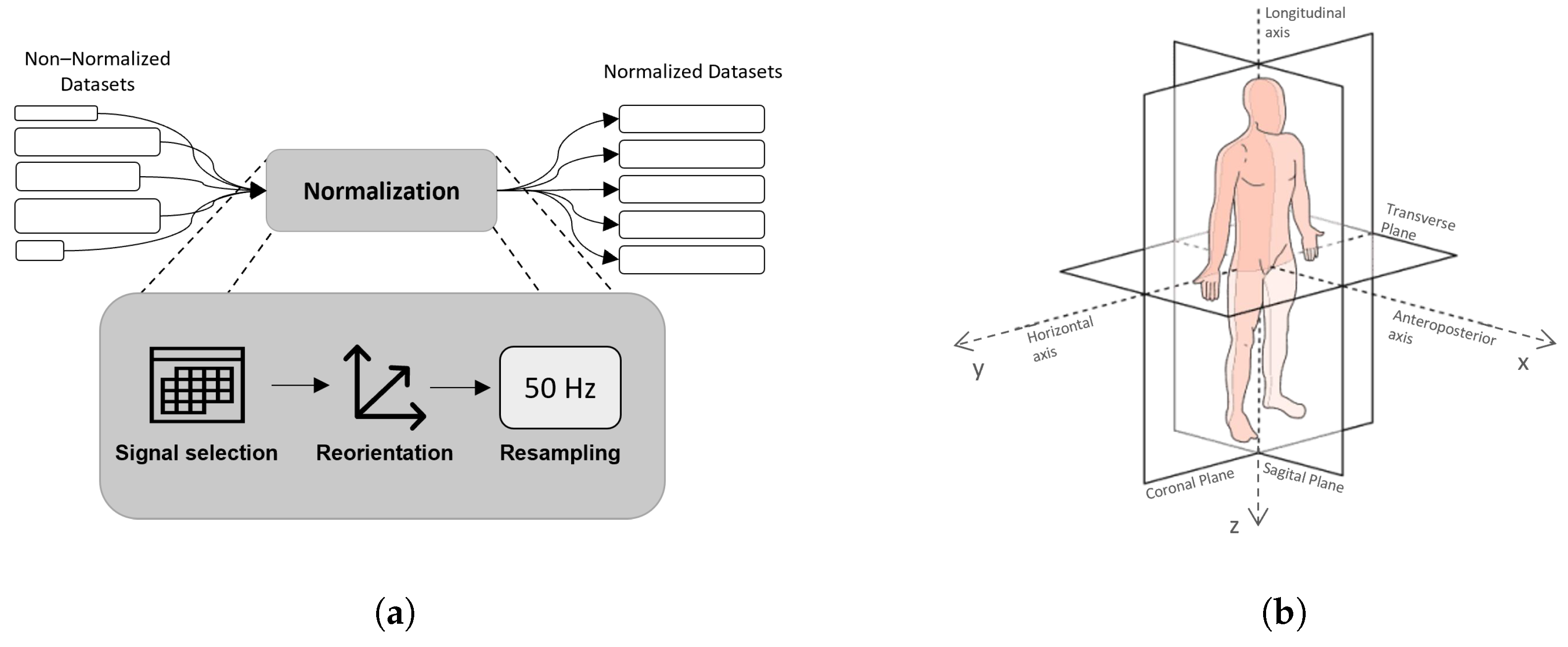
2.1. Public Dataset Fusion and Normalization
- Sisfall [16]: Data acquired with 23 healthy young adults (19–30 years, 149–183 cm, 42–81 kg) and 15 healthy elderly participants (60–75 years, 150–171 cm, 50–102 kg) with a device composed of two types of accelerometer and one gyroscope fixed to the waist of the participants, who performed 19 ADL and 15 fall types.
- FallAllD [29]: Data acquired from 15 healthy subjects (21–53 years, 158–187 cm, 48–85 kg) who used 3 devices equipped with an accelerometer, a gyroscope, a magnetometer and a barometer. A total of 44 classes of ADL and 35 classes of falls were performed.
- FARSEEING [30]: Large-scale collaborative database to collect and share sensor signals from real-world falls. Real fall data are acquired from either 2 locations: waist or thigh, and the acquisition devices are equipped with up to 3 sensors, namely accelerometer, gyroscope and magnetometer.
- UCI HAR [15]: Dataset recorded from 30 healthy subjects (19–48 years) by using a waist-mounted smartphone with an embedded 3-axis accelerometer, gyroscope, and magnetometer. This dataset contains six classes of ADL: walking, ascending stairs, descending stairs, sitting, standing, and laying.
- Cotechini et al. [31]: Dataset acquired from 8 healthy subjects (22–29 years old, 173–187 cm, 60–94 kg) using a wearable device containing a 3-axis accelerometer and gyroscope, tied to the subject’s waist, that recorded subject’s acceleration and orientation. Subjects simulated 13 typologies of falls and 5 types of ADL.
- UMAFall [32]: A dataset acquired from a total of 17 healthy subjects (18–55 years, 50–93 kg, 155–195 cm). Accelerometer, gyroscope and magnetometer data were colected from five wearable sensing devices, located on the subject’s chest, waist, wrist, ankle and pocket. The participants performed 8 different ADL and 3 different typologies of falls (except by those older than 50 years, who did not perform falls).
- +Sense [33]: Dataset with data acquired from 10 healthy subjects (44.02 ± 16.42 years, 67.5 ± 16.06 kg, 172 ± 7.93 cm) and 40 subjects with Parkinson’s disease (64.00 ± 10.60 years, 69.93 ± 11.41 kg, 165.93 ± 8.65 cm). A waist-mounted waistband, equipped with an accelerometer, a gyroscope and a magnetometer recorded subject’s data in walking activity protocols.
- SafeWalk [34]: Dataset acquired with 12 healthy subjects (25.33 ± 6.33 years old, 66.92 ± 10.07 kg, 1.74 ± 0.11 m). Five IMUs were attached to the lower back, both back thighs, and to both feet of the subjects, who performed walking trials and front fall events.
- InertialLab [35]: Dataset which includes data from 11 able-bodied subjects (24.53 ± 2.09 years old, 171 ± 10 cm, 65.29 ± 9.02 kg). Gyroscopes and accelerometers were attached to six lower limbs and trunk segments. Walking in varying speed and terrain (flat, ramp, and stairs) and including turns were the activities carried out by the subjects.
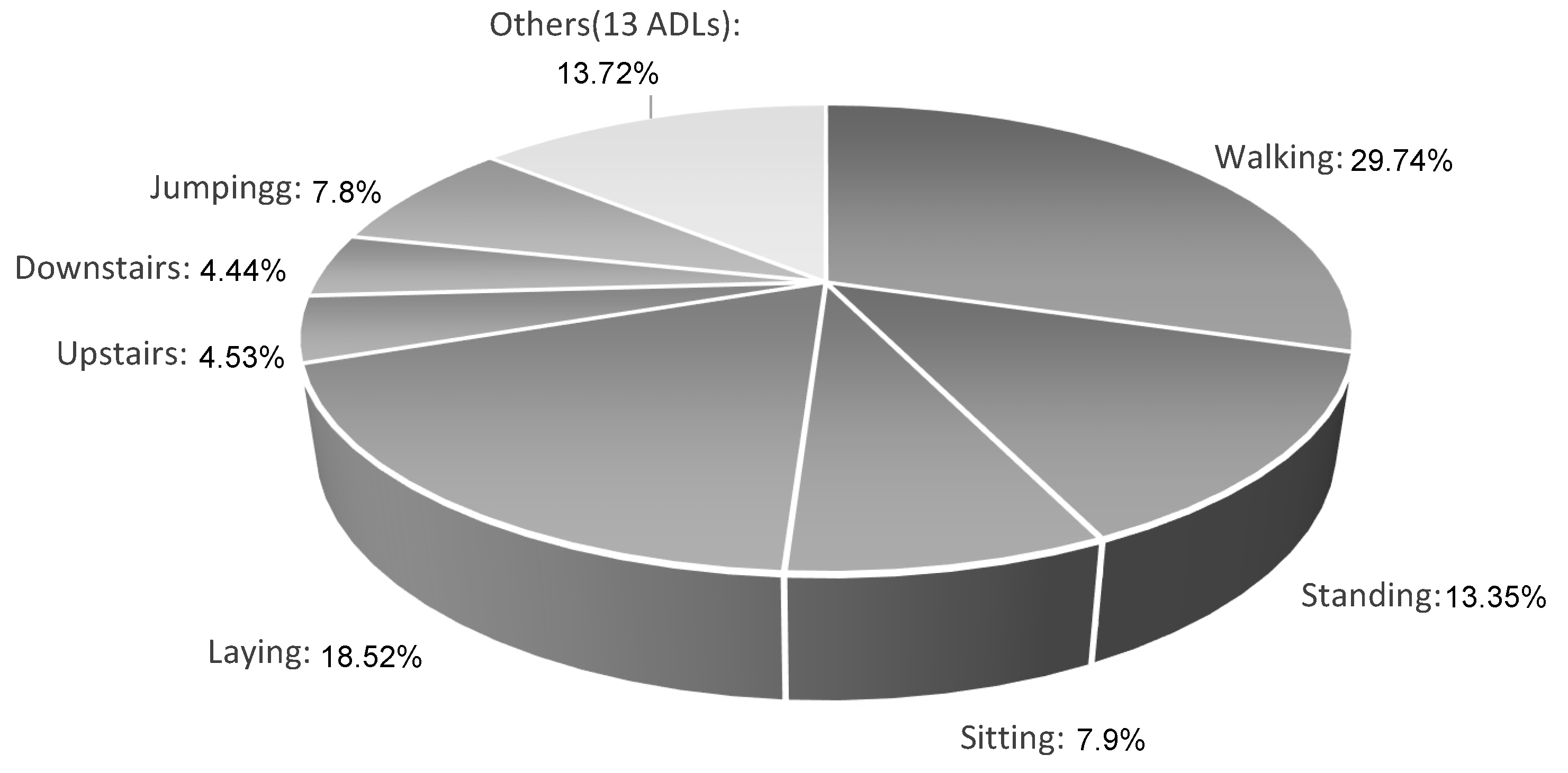
2.2. ADL and Falls
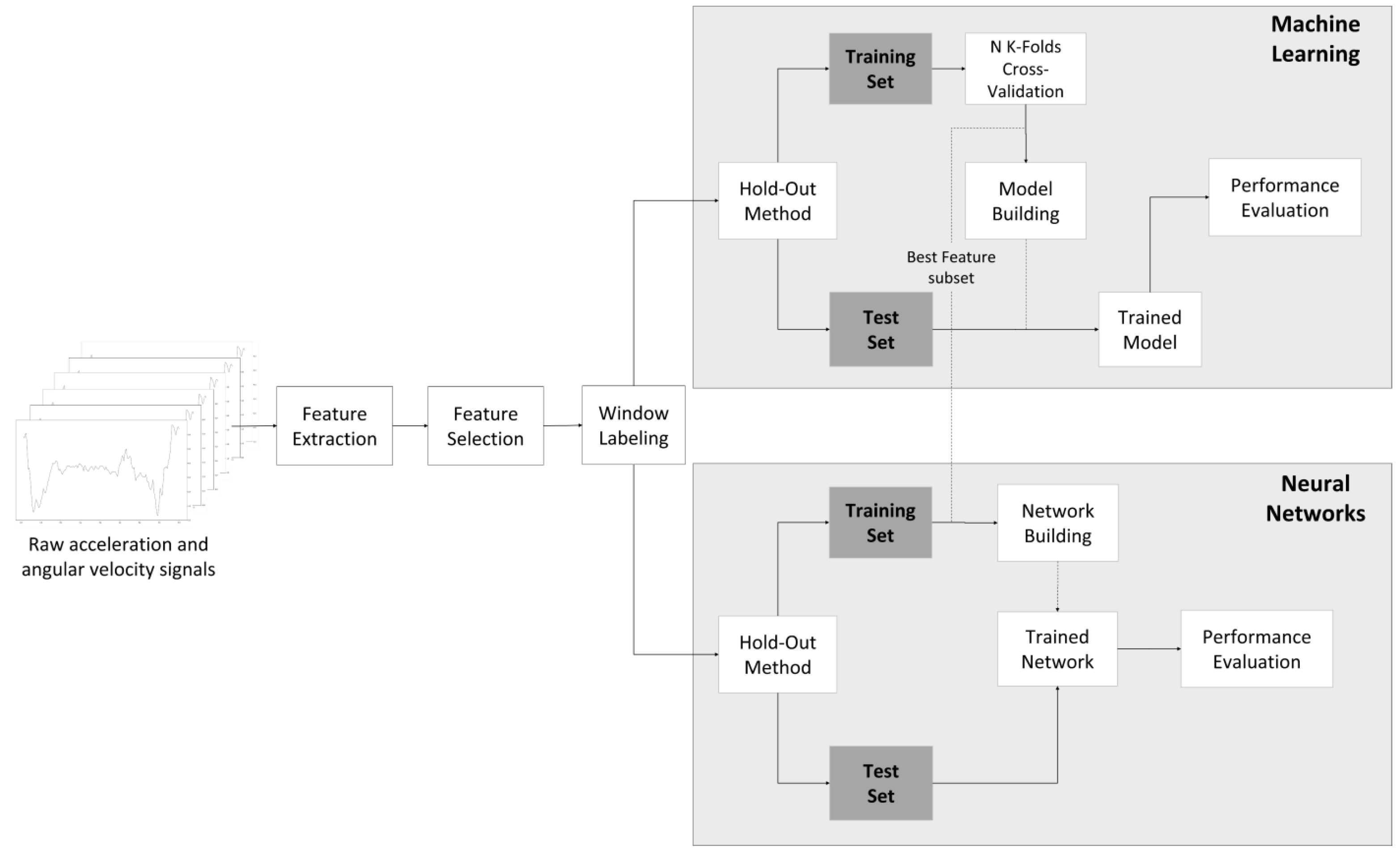
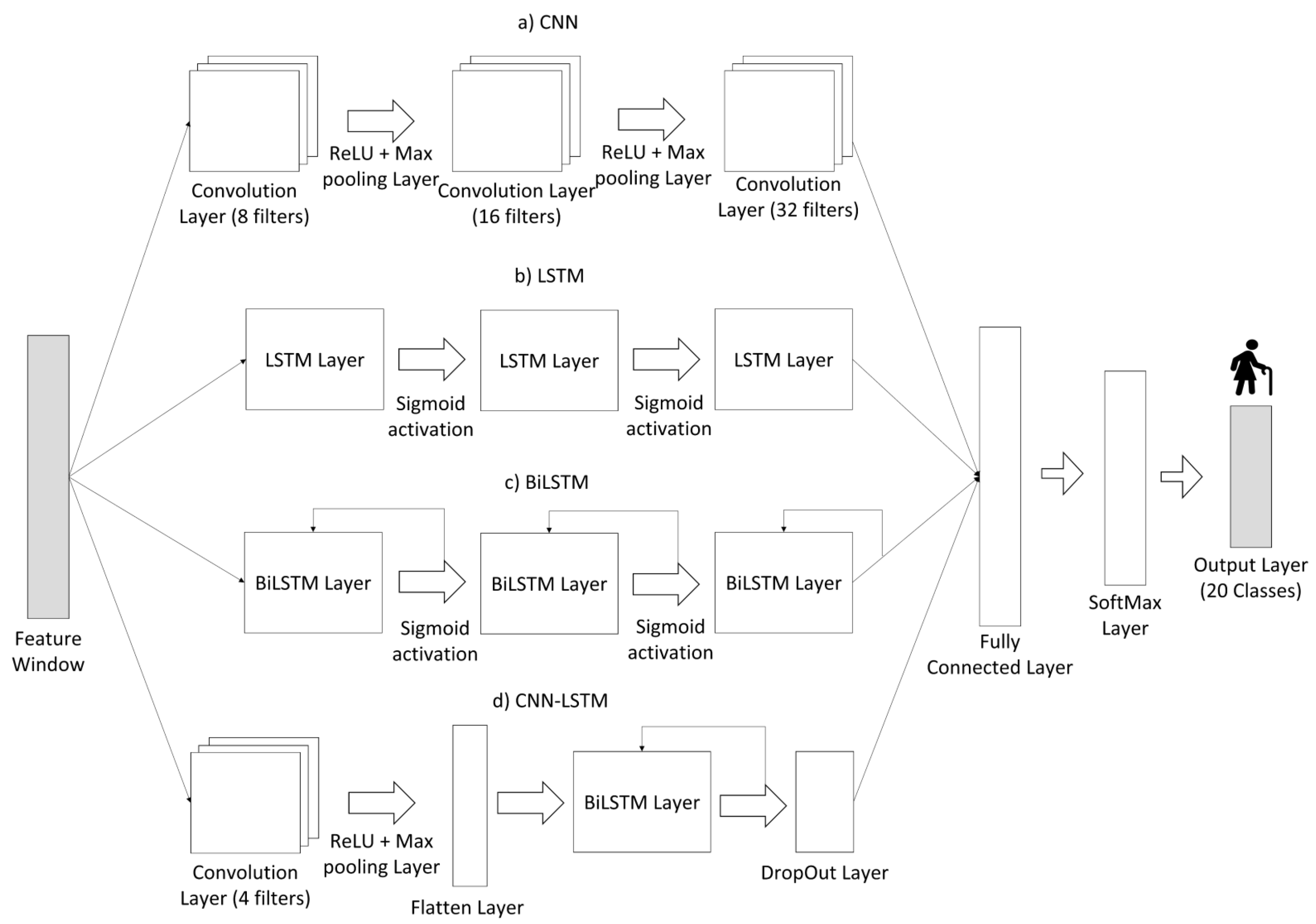
2.3. Machine and Deep Learning Classifiers: Comparative Analysis
2.3.1. Feature Extraction
2.3.2. Pre-Processing and Feature Selection
2.3.3. Model Building and Evaluation
3. Results
3.1. PCA Outcomes
3.2. ADL and Fall Events Classification
3.3. Deep Learning Outcomes
3.4. Window Size and Classification Time
4. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FSM | No. of Features | Ranked Features |
|---|---|---|
| Relief-F | 85 | 66,69,70,68,67,65,110,128,142,143,144,35,31,101,12,9,111,148,15,14,112,114, 151,45,11,20,13,188,10,42,109,102,113,85,153,96,154,17,147,23,41,103,145,146, 116,21,22,18,190,19,16,152,74,83,149,84,24,88,197,64,123,90,89,155,28,46,194, 174,59,48,71,60,29,61,191,62,115,97,32,40,91,80,87 |
| PCA | 65 | 9,97,188,42,102,43,101,128,144,113,148,110,184,31,142,154,116,83,41,103,111, 143,114,183,182,33,176,30,109,86,149,47,151,74,153,112,126,84,44,26,147,69, 180,127,100,145,115,27,155,146,120,4,35,85,36,1,42,7,91,46,45,186,175,192,96 |
References
- Banos, O.; Galvez, J.M.; Damas, M.; Pomares, H.; Rojas, I. Window Size Impact in Human Activity Recognition. Sensors 2014, 14, 6474–6499. [Google Scholar] [CrossRef] [Green Version]
- Altuve, M.; Lizarazo, P.; Villamizar, J. Human activity recognition using improved complete ensemble EMD with adaptive noise and long short-term memory neural networks. Biocybern. Biomed. Eng. 2020, 40, 901–909. [Google Scholar] [CrossRef]
- Murad, A.; Pyun, J.Y. Deep Recurrent Neural Networks for Human Activity Recognition. Sensors 2017, 17, 2556. [Google Scholar] [CrossRef] [Green Version]
- Gomaa, W.; Elbasiony, R.; Ashry, S. ADL Classification Based on Autocorrelation Function of Inertial Signals. In Proceedings of the 2017 16th IEEE International Conference on Machine Learning and Applications (ICMLA), Cancun, Mexico, 18–21 December 2017; pp. 833–837. [Google Scholar] [CrossRef]
- Elangovan, R.; Perumal, T.; Padmavathi, S. Human Activity Recognition with Smartphone and Wearable Sensors Using Deep Learning Techniques: A Review. IEEE Sens. J. 2021, 21, 13029–13040. [Google Scholar] [CrossRef]
- Wang, Q.; Luo, H.; Wang, J.; Sun, L.; Ma, Z.; Zhang, C.; Fu, M.; Zhao, F. Recent Advances in Pedestrian Navigation Activity Recognition: A Review. IEEE Sens. J. 2022, 22, 7499–7518. [Google Scholar] [CrossRef]
- Muhammad, F.; Shahid, N.; Omair, S.M.; Haque, M.Z.U. Integrated Wristband using an Inertial Measurement Unit and Electromyography Sensors to Control Robotic Car. J. Inf. Commun. Technol. Robot. Appl. 2019, 10, 36–41. [Google Scholar]
- Wang, G.; Li, Q.; Wang, L.; Zhang, Y.; Liu, Z. Elderly Fall Detection with an Accelerometer Using Lightweight Neural Networks. Electronics 2019, 8, 1354. [Google Scholar] [CrossRef] [Green Version]
- Kańtoch, E. Recognition of Sedentary Behavior by Machine Learning Analysis of Wearable Sensors during Activities of Daily Living for Telemedical Assessment of Cardiovascular Risk. Sensors 2018, 18, 3219. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Nugent, C.D.; Wang, H. A Knowledge-Driven Approach to Activity Recognition in Smart Homes. IEEE Trans. Knowl. Data Eng. 2012, 24, 961–974. [Google Scholar] [CrossRef]
- Zhang, S.; Wei, Z.; Nie, J.; Huang, L.; Wang, S.; Li, Z. A Review on Human Activity Recognition Using Vision-Based Method. J. Healthc. Eng. 2017, 2017, e3090343. [Google Scholar] [CrossRef]
- Bulling, A.; Blanke, U.; Schiele, B. A Tutorial on Human Activity Recognition Using Body-Worn Inertial Sensors. ACM Comput. Surv. 2014, 46, 1–33. [Google Scholar] [CrossRef]
- Roy, N.; Misra, A.; Cook, D. Ambient and smartphone sensor assisted ADL recognition in multi-inhabitant smart environments. J. Ambient Intell. Humaniz. Comput. 2016, 7, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Baghezza, R.; Bouchard, K.; Bouzouane, A.; Gouin-Vallerand, C. From Offline to Real-Time Distributed Activity Recognition in Wireless Sensor Networks for Healthcare: A Review. Sensors 2021, 21, 2786. [Google Scholar] [CrossRef]
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. A Public Domain Dataset for Human Activity Recognition Using Smartphones. In Proceedings of the 21th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, Bruges, Belgium, 24–26 April 2013. [Google Scholar]
- Sucerquia, A.; López, J.D.; Vargas-Bonilla, J.F. SisFall: A Fall and Movement Dataset. Sensors 2017, 17, 198. [Google Scholar] [CrossRef]
- Chavarriaga, R.; Sagha, H.; Calatroni, A.; Digumarti, S.T.; Tröster, G.; del R. Millán, J.; Roggen, D. The Opportunity challenge: A benchmark database for on-body sensor-based activity recognition. Pattern Recognit. Lett. 2013, 34, 2033–2042. [Google Scholar] [CrossRef] [Green Version]
- Reiss, A.; Stricker, D. Introducing a New Benchmarked Dataset for Activity Monitoring. In Proceedings of the 16th International Symposium on Wearable Computers, Newcastle, UK, 18–22 June 2012. [Google Scholar] [CrossRef]
- el Achkar, C.M.; Lenoble-Hoskovec, C.; Paraschiv-Ionescu, A.; Major, K.; Büla, C.; Aminian, K. Instrumented shoes for activity classification in the elderly. Gait Posture 2016, 44, 12–17. [Google Scholar] [CrossRef]
- Gupta, P.; Dallas, T. Feature selection and activity recognition system using a single triaxial accelerometer. IEEE Trans. Biomed. Eng. 2014, 61, 1780–1786. [Google Scholar] [CrossRef]
- Awais, M.; Chiari, L.; Ihlen, E.A.F.; Helbostad, J.L.; Palmerini, L. Physical Activity Classification for Elderly People in Free-Living Conditions. IEEE J. Biomed. Health Inform. 2019, 23, 197–207. [Google Scholar] [CrossRef]
- Chung, S.; Lim, J.; Noh, K.J.; Kim, G.; Jeong, H. Sensor Data Acquisition and Multimodal Sensor Fusion for Human Activity Recognition Using Deep Learning. Sensors 2019, 19, 1716. [Google Scholar] [CrossRef] [Green Version]
- Gil-Martín, M.; San-Segundo, R.; Fernández-Martínez, F.; Ferreiros-López, J. Improving physical activity recognition using a new deep learning architecture and post-processing techniques. Eng. Appl. Artif. Intell. 2020, 92, 103679. [Google Scholar] [CrossRef]
- Zhang, M.; Sawchuk, A.A. USC-HAD: A Daily Activity Dataset for Ubiquitous Activity Recognition Using Wearable Sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing. Association for Computing Machinery, 2012, UbiComp ’12, Pittsburgh, PA, USA, 5–8 September 2012; pp. 1036–1043. [Google Scholar] [CrossRef]
- Bachlin, M.; Plotnik, M.; Roggen, D.; Maidan, I.; Hausdorff, J.M.; Giladi, N.; Troster, G. Wearable Assistant for Parkinson’s Disease Patients With the Freezing of Gait Symptom. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 436–446. [Google Scholar] [CrossRef]
- Zappi, P.; Lombriser, C.; Stiefmeier, T.; Farella, E.; Roggen, D.; Benini, L.; Tröster, G. Activity Recognition from On-Body Sensors: Accuracy-Power Trade-Off by Dynamic Sensor Selection. In Proceedings of the Wireless Sensor Networks; Verdone, R., Ed.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 17–33. [Google Scholar]
- Ferrari, A.; Micucci, D.; Mobilio, M.; Napoletano, P. Trends in human activity recognition using smartphones. J. Reliab. Intell. Environ. 2021, 7, 189–213. [Google Scholar] [CrossRef]
- Shany, T.; Wang, K.; Liu, Y.; Lovell, N.H.; Redmond, S.J. Review: Are we stumbling in our quest to find the best predictor? Over-optimism in sensor-based models for predicting falls in older adults. Healthc. Technol. Lett. 2015, 2, 79–88. [Google Scholar] [CrossRef] [Green Version]
- Saleh, M.; Abbas, M.; Le Jeannès, R.B. FallAllD: An Open Dataset of Human Falls and Activities of Daily Living for Classical and Deep Learning Applications. IEEE Sens. J. 2021, 21, 1849–1858. [Google Scholar] [CrossRef]
- Klenk, J.; Schwickert, L.; Palmerini, L.; Mellone, S.; Bourke, A.; Ihlen, E.A.F.; Kerse, N.; Hauer, K.; Pijnappels, M.; Synofzik, M.; et al. The FARSEEING real-world fall repository: A large-scale collaborative database to collect and share sensor signals from real-world falls. Eur. Rev. Aging Phys. Act. 2016, 13, 8. [Google Scholar] [CrossRef] [Green Version]
- Cotechini, V.; Belli, A.; Palma, L.; Morettini, M.; Burattini, L.; Pierleoni, P. A dataset for the development and optimization of fall detection algorithms based on wearable sensors. Data Brief 2019, 23, 103839. [Google Scholar] [CrossRef]
- Casilari, E.; Santoyo-Ramón, J.A.; Cano-García, J.M. UMAFall: A Multisensor Dataset for the Research on Automatic Fall Detection. Procedia Comput. Sci. 2017, 110, 32–39. [Google Scholar] [CrossRef]
- Gonçalves, H.; Moreira, R.; Rodrigues, A.; Santos, C. Finding Parameters around the Abdomen for a Vibrotactile System: Healthy and Patients with Parkinson’s Disease. J. Med. Syst. 2018, 42, 232. [Google Scholar] [CrossRef]
- Ribeiro, N.F.; André, J.; Costa, L.; Santos, C.P. Development of a Strategy to Predict and Detect Falls Using Wearable Sensors. J. Med. Syst. 2019, 43, 134. [Google Scholar] [CrossRef]
- Figueiredo, J.; Carvalho, S.P.; Vilas-Boas, J.P.; Gonçalves, L.M.; Moreno, J.C.; Santos, C.P. Wearable Inertial Sensor System towards Daily Human Kinematic Gait Analysis: Benchmarking Analysis to MVN BIOMECH. Sensors 2020, 20, 2185. [Google Scholar] [CrossRef] [Green Version]
- Fida, B.; Bernabucci, I.; Bibbo, D.; Conforto, S.; Schmid, M. Varying behavior of different window sizes on the classification of static and dynamic physical activities from a single accelerometer. Med. Eng. Phys. 2015, 37, 705–711. [Google Scholar] [CrossRef]
- Zhang, J.; Lockhart, T.E.; Soangra, R. Classifying Lower Extremity Muscle Fatigue During Walking Using Machine Learning and Inertial Sensors. Ann. Biomed. Eng. 2014, 42, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Roffo, G.; Melzi, S.; Castellani, U.; Vinciarelli, A. Infinite Latent Feature Selection: A Probabilistic Latent Graph-Based Ranking Approach. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 1407–1415. [Google Scholar] [CrossRef] [Green Version]
- Roffo, G. Feature Selection Library (MATLAB Toolbox). arXiv 2016, arXiv:1607.01327. [Google Scholar]
- Guo, J.; Guo, Y.; Kong, X.; He, R. Unsupervised feature selection with ordinal locality. In Proceedings of the 2017 IEEE International Conference on Multimedia and Expo (ICME), Hong Kong, China, 10–14 July 2017; pp. 1213–1218. [Google Scholar]
- Du, L.; Shen, Y.D. Unsupervised Feature Selection with Adaptive Structure Learning. arXiv 2015, arXiv:1504.00736. [Google Scholar]
- Peng, H.; Long, F.; Ding, C. Feature selection based on mutual information criteria of max-dependency, max-relevance, and min-redundancy. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1226–1238. [Google Scholar] [CrossRef]
- de Amorim, R.C. Computational Methods of Feature Selection; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Zaffalon, M.; Hutter, M. Robust Feature Selection by Mutual Information Distributions. In Proceedings of the Eighteenth Conference on Uncertainty in Artificial Intelligence, Edmonton, AB, Canada, 1–4 August 2002; Morgan Kaufmann Publishers Inc.: Burlington, ON, Canada, 2002; pp. 577–584. [Google Scholar]
- Bradley, P.; Mangasarian, O.L. Feature Selection via Concave Minimization and Support Vector Machines. In Proceedings of the Fifteenth International Conference (ICML ’98. Morgan Kaufmann, Madison, WI, USA, 24–27 July 1998; pp. 82–90. [Google Scholar]
- Roffo, G.; Melzi, S. Ranking to Learn: Feature Ranking and Selection via Eigenvector Centrality. arXiv 2017, arXiv:1704.05409. [Google Scholar]
- Jolliffe, I.T. Introduction. In Principal Component Analysis; Jolliffe, I.T., Ed.; Springer Series in Statistics; Springer: New York, NY, USA, 2002; pp. 1–9. [Google Scholar] [CrossRef]
- Ribeiro, N.F.; Mouta, P.; Santos, C.P. Two kinematic data-based approaches for cane event detection. J. Ambient. Intell. Humaniz. Comput. 2021. [Google Scholar] [CrossRef]
- Silva, A.P.D.; Stam, A. Discriminant analysis. In Reading and Understanding Multivariate Statistics; American Psychological Association: Washington, DC, USA, 1995; pp. 277–318. [Google Scholar]
- Abu Alfeilat, H.A.; Hassanat, A.B.; Lasassmeh, O.; Tarawneh, A.S.; Alhasanat, M.B.; Eyal Salman, H.S.; Prasath, V.S. Effects of Distance Measure Choice on K-Nearest Neighbor Classifier Performance: A Review. Big Data 2019, 7, 221–248. [Google Scholar] [CrossRef] [Green Version]
- Dong, X.; Yu, Z.; Cao, W.; Shi, Y.; Ma, Q. A survey on ensemble learning. Front. Comput. Sci. 2020, 14, 241–258. [Google Scholar] [CrossRef]
- Kingsford, C.; Salzberg, S.L. What are decision trees? Nat. Biotechnol. 2008, 26, 1011–1013. [Google Scholar] [CrossRef]
- Frank, A.E.; Kubota, A.; Riek, L.D. Wearable activity recognition for robust human-robot teaming in safety-critical environments via hybrid neural networks. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 449–454. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; Adaptive Computation and Machine Learning Series; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Jurman, G.; Riccadonna, S.; Furlanello, C. A Comparison of MCC and CEN Error Measures in Multi-Class Prediction. PLoS ONE 2012, 7, e41882. [Google Scholar] [CrossRef] [Green Version]
- Ashry, S.; Ogawa, T.; Gomaa, W. CHARM-Deep: Continuous Human Activity Recognition Model Based on Deep Neural Network Using IMU Sensors of Smartwatch. IEEE Sens. J. 2020, 20, 8757–8770. [Google Scholar] [CrossRef]
- Danielsen, A.; Olofsen, H.; Bremdal, B.A. Increasing fall risk awareness using wearables: A fall risk awareness protocol. J. Biomed. Inform. 2016, 63, 184–194. [Google Scholar] [CrossRef]


| DataSet | Work | Sensors | Sample Frequency | Participants | N° of Classes | Accuracy |
|---|---|---|---|---|---|---|
| Private Dataset | Chung et al. [22] | A, G, M | 100 Hz | 5 | 9 | 93% |
| SisFall [16] | Wang et al. [8] | A, G | 200 Hz | 38 | 2 | <99% |
| PAMAP2 [18] | Gil-Martín et al. [23] | A, G, M | 9 Hz | 9 | 18 | 96.62% |
| UCI-HAD [15] | Altuve et al. [2] Murad et al. [3] | A, G, M | 50 Hz | 30 | 6 | [2]-96.7% [3]-92.9% |
| USC-HAD [24] | Murad et al. [3] | A, G | 100 Hz | 14 | 12 | 97.8% |
| Opportunity [17] | Murad et al. [3] | A, G, M | 30 Hz | 4 | 18 1 | 92.5% |
| Daphnet FOG [25] | Murad et al. [3] | A | 64 Hz | 10 | 2 | 94.1% |
| Skoda [26] | Murad et al. [3] | A | 98 Hz | 1 | 11 1 | 92.6% |
| DataSet | Availability | Sensors | Location | Sample Frequency | Participants | ADL Falls |
|---|---|---|---|---|---|---|
| SisFall [16] 1 | Public | A, G | Waist | 200 Hz | 23 subjects <30 years 15 subjects >60 years | 19 ADL 15 Falls |
| FALLALLD [29] 1 | Public | A, G M, B | Chest, Waist, Wrist | 238 Hz | 15 subjects 21–53 years | 44 ADL 35 falls |
| FARSEEING [30] 1 | Public | A, G, M | Waist, Thigh | 20 Hz 100 Hz | 20 subjects 2 | Real falls |
| UCI HAR [15] | Public | A, G | Waist | 50 Hz | 30 subjects 19–48 years | 12 ADL |
| Cotechini [31] 1 | Public | A, G | Waist | 33, 33 Hz | 8 subjects | 5 ADL 13 Falls |
| UMAFall [32] | Public | A, G, M | Waist, Chest, Wrists, Ankle, Front pocket | 20 Hz | 17 subjects 18–55 years | 8 ADL 3 Falls |
| +Sense [33] | Private | A, G, M | Waist | 100 Hz | 10 Healthy 40 Pathological | 1 ADL |
| SafeWalk [34] | Private | A, G, M | Waist, Thighs, Feet | 30 Hz | 12 subjects 25.33 ± 6.33 years | 1 ADL Fall |
| InertialLab [35] | Private | A, G, M | Waist, Thighs, Shank, Feet | 200 Hz | 7 subjects 23–26 years | 5 ADL |
| Periodic Activities and Static Postures | Transitions | Fall Events |
|---|---|---|
| Walking | Lying to Stand | Forwards |
| Standing | Stand to Sit | Backwards |
| Sitting | Sit to Stand | Lateral |
| Lying | Stand to Pick to Stand | Syncope |
| Upstairs | Stand to Lying | |
| Downstairs | Change Position (Lying) | |
| Jumping | Turning | |
| Jogging | Bending |
| Feature Number | Feature Description |
|---|---|
| [1–6] | Acceleration and Angular velocity (AP, V, ML) |
| [7–8] | SumVM of acceleration and Angular velocity |
| [9–24] | Skewness and kurtosis of acceleration, Angular velocity (AP, V, ML) and SumVM signals |
| [25–64] | Min, max, mean, variance and Std deviation of acceleration, angular velocity (AP, V, ML) and SumVM signals |
| [65–70] | Correlation between V-ML, V-AP and ML-AP axis of acceleration and Angular velocity |
| [71–77] | Slope, Total angular change, Resultant angular acceleration, ASMA, SMA, Absolute vertical acceleration, Cumulative horizontal displacement |
| [78–102] | Peak-to-Peak, Root Mean Square and Ratio Index of Acceleration, Angular velocity (AP, V, ML) and SumVM signals |
| [103–115] | Resultant angle change, Flutuation frequency, Resultant of average acceleration and Resultant of standard deviation (AP, V, ML) |
| [116–117] | Resultant of Delta changes of acceleration and Angular velocity |
| [118–133] | Gravity component, Displacement, Displacement range, Cumulative sway length and Mean sway velocity (AP, V, ML) |
| Slope changes, Zero crossings, Waveform length of acceleration, Angular velocity (AP, V, ML) and SumVM signals | |
| [133–189] | Energy, Mean frequency, Peak frequency and magnitude of acceleration, Angular velocity (AP, V, ML) and SumVM signals |
| [190–195] | SumVM of resultant angular velocity, average acceleration and Standard deviation, Maximum resultant angular velocity and Acceleration in the horizontal plane |
| [196–199] | Acceleration exponential moving average, Rotational angle of acceleration SumVM, Z-Score, Magnitude of angular displacement |
| Feature Selection Methods (FSM) | FSM Type |
|---|---|
| Infnite Latent Feature Selection (ILFS) [38] | Filtering |
| Unsupervised Feature Selection with Ordinal Locality (UFSOL) [40] | Wrapper |
| Feature Selection with Adaptive Structure Learning (FSASL) [41] | Wrapper |
| Minimum-Redundancy Maximum-Relevancy (MRMR) [42] | Filtering |
| Relief-F [43] | Filtering |
| Mutual Information Feature Selection (MutInfFS) [44] | Filtering |
| Feature Selection Via Concave Minimization (FSV) [45] | Embedded |
| Correlation-Based Feature Selection (CFS) [46] | Filtering |
| Least Absolute Shrinkage and Selection Operator (LASSO) [43] | Embedded |
| Principal Component Analysis (PCA) [47] | Filtering |
| Model | Reference | Description |
|---|---|---|
| DA | [49] | A method that finds combinations of features that separate two or more classes of objects or events, searching for the most variance between classes, and information that maximizes the difference between classes. |
| K-NN | [50] | Compares each new instance with all datasets available and the instance closest by distance metrics is used to perform classification. Since every sample of the dataset must be checked for every instance, the time and complexity of the method rises according to the dataset size. |
| Ensemble Learning | [51] | Creates multiple instances of traditional ML methods and combines them to evolve a single optimal solution to a problem. This approach is capable of producing better predictive models compared to the traditional approach. |
| DTs | [52] | A model that predicts the value of a target variable based on numerous input variables. A decision tree is constituted by an internal node, based on which the tree splits into branches. The end of the branch that does not split any longer is the decision. |
| Specification | Value |
|---|---|
| Epoch Number | 100 |
| Hidden Layers | 150 |
| Batch Size | 64 |
| Optimizer | Adam [54] |
| Learning Rate | 0.001 (Constant) |
| Loss Function | Cross-Entropy |
| ML Model | FSM | CV Step | N° of Features | ACC (%) | Sens (%) | Spec (%) | Prec (%) | F1S (%) | MCC (%) |
|---|---|---|---|---|---|---|---|---|---|
| K-NN | Relief-F | 85 | 93.63 | 84.17 | 99.64 | 86.80 | 85.43 | 85.10 | |
| PCA | 5 Fold (1 rep.) | 85 | 92.99 | 84.08 | 99.60 | 86.01 | 85.01 | 84.63 | |
| FSASL | 70 | 91.49 | 81.39 | 99.51 | 83.66 | 82.48 | 82.02 | ||
|
Ensemble Learning | PCA | 65 | 94.59 | 82.22 | 99.68 | 90.54 | 85.80 | 85.78 | |
| K-NN | Relief-F | 85 | 93.62 ± 0.016 | 84.12 ± 0.066 | 99.64 ± 0.001 | 86.75 ± 0.055 | 85.38 ± 0.056 | 85.05 ± 0.056 | |
| PCA | 5 Fold (10 rep.) | 85 | 92.95 ± 0.021 | 83.91 ± 0.094 | 99.60 ± 0.001 | 85.88 ± 0.085 | 84.86 ± 0.085 | 84.48 ± 0.086 | |
| FSASL | 70 | 91.48 ± 0.026 | 81.40 ± 0.063 | 99.51 ± 0.001 | 83.59 ± 0.079 | 82.45 ± 0.066 | 81.99 ± 0.067 | ||
|
Ensemble Learning | PCA | 65 | 94.59 ± 0.015 | 82.18 ± 0.067 | 99.68 ± 0.001 | 90.64 ± 0.073 | 85.79 ± 0.061 | 85.79 ± 0.060 |
| ML Model | FSM | N° of Features | ACC (%) | Sens (%) | Spec (%) | Prec (%) | F1S (%) | MCC (%) |
|---|---|---|---|---|---|---|---|---|
| K-NN | Relief-F | 85 | 97.27 | 92.90 | 99.84 | 93.79 | 93.34 | 93.19 |
| Ensemble Learning | PCA | 65 | 95.44 | 85.97 | 99.73 | 91.67 | 88.43 | 88.36 |
| FSM | Feature Number | Architecture | ACC (%) | Sens (%) | Spec (%) | Prec (%) | F1S (%) | MCC (%) |
|---|---|---|---|---|---|---|---|---|
| Relief-F | 85 | CNN | 57.01 | 37.06 | 97.22 | 54.67 | 35.47 | 37.87 |
| LSTM | 92.06 | 79.58 | 99.55 | 84.25 | 81.02 | 81.01 | ||
| CNN-LSTM | 88.84 | 74.48 | 99.36 | 75.24 | 74.53 | 74.06 | ||
| BiLSTM | 92.55 | 81.14 | 99.57 | 85.56 | 83.14 | 82.83 | ||
| PCA | 65 | CNN | 42.67 | 26.46 | 96.15 | 54.49 | 22.27 | 24.90 |
| LSTM | 91.46 | 77.81 | 99.51 | 84.38 | 80.61 | 80.38 | ||
| CNN-LSTM | 88.55 | 74.33 | 99.35 | 75.09 | 74.36 | 73.88 | ||
| BiLSTM | 91.48 | 79.33 | 99.52 | 83.32 | 80.67 | 80.52 |
| ML Model + FSM | Window Size (s) | Window Overlap (%) | ACC (%) | Sens (%) | Spec (%) | Precn (%) | F1S (%) | MCC (%) |
|---|---|---|---|---|---|---|---|---|
| K-NN + Relief-f | 0.5 | 80 | 98.22 | 95.20 | 99.90 | 96.04 | 95.62 | 95.52 |
| 1 | 97.27 | 92.90 | 99.84 | 93.79 | 93.34 | 93.19 | ||
| 1.5 | 96.30 | 91.73 | 99.79 | 91.15 | 91.41 | 91.22 | ||
| 2 | 95.33 | 90.53 | 99.74 | 88.51 | 89.44 | 89.22 | ||
| Ensemble + PCA | 0.5 | 96.53 | 88.94 | 99.79 | 94.09 | 91.29 | 91.21 | |
| 1 | 95.44 | 85.97 | 99.73 | 91.67 | 88.43 | 88.36 | ||
| 1.5 | 95.01 | 85.60 | 99.71 | 90.76 | 87.64 | 87.62 | ||
| 2 | 94.51 | 85.21 | 99.68 | 89.37 | 86.92 | 86.79 |
| ML Model + FSM | Window Size (s) | Window Overlap (%) | Test Windows | Train Time (s) | Test Time (s) | Test Time per Window (s) |
|---|---|---|---|---|---|---|
| K-NN + Relief-f | 0.5 | 80 | 409,740 | 4.36 | 213,588.88 | 0.521 |
| 1 | 199,997 | 4.18 | 66,782.58 | 0.334 | ||
| 1.5 | 130,421 | 4.70 | 12,633.08 | 0.097 | ||
| 2 | 95,482 | 4.09 | 6752.47 | 0.071 | ||
| Ensemble + PCA | 0.5 | 409,740 | 829.55 | 15.99 | ||
| 1 | 199,997 | 279.03 | 8.54 | |||
| 1.5 | 130,421 | 145.21 | 5.68 | |||
| 2 | 95,482 | 100.23 | 3.94 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martins, L.M.; Ribeiro, N.F.; Soares, F.; Santos, C.P. Inertial Data-Based AI Approaches for ADL and Fall Recognition. Sensors 2022, 22, 4028. https://doi.org/10.3390/s22114028
Martins LM, Ribeiro NF, Soares F, Santos CP. Inertial Data-Based AI Approaches for ADL and Fall Recognition. Sensors. 2022; 22(11):4028. https://doi.org/10.3390/s22114028
Chicago/Turabian StyleMartins, Luís M., Nuno Ferrete Ribeiro, Filipa Soares, and Cristina P. Santos. 2022. "Inertial Data-Based AI Approaches for ADL and Fall Recognition" Sensors 22, no. 11: 4028. https://doi.org/10.3390/s22114028
APA StyleMartins, L. M., Ribeiro, N. F., Soares, F., & Santos, C. P. (2022). Inertial Data-Based AI Approaches for ADL and Fall Recognition. Sensors, 22(11), 4028. https://doi.org/10.3390/s22114028