1. Introduction
Over the past 20 years, the medical application of wireless capsule endoscopy (WCE) for the diagnosis of the gastrointestinal tract (GIT) has been rapidly developed [
1,
2,
3]. Compared with traditional endoscopy, WCE can be applied with less traumatic procedures for the patient. The complete diagnosis with WCE takes up to 12 h [
4]. Although WCE has a crucial role in obtaining useful images of the GIT, particularly from the diseased region, identifying the exact location of the detected disease is still an open research problem. Therefore, the precise localization of the capsule and detected disease during diagnosis is of particular interest among researchers in the field of WCE.
Various approaches have been utilized for the localization of capsule endoscopes. The three most promising methods are the video-, radio-frequency- (RF) and magnetic field-based methods [
3,
5].
The first localization method uses the video captured by the WCE to obtain information about the relative changes between consecutive video frames. Because image processing for localization can be done on an external computer, no additional hardware is needed inside the capsule. However, when the video-based localization method is used alone, the localization performance is insufficient [
3,
6]. Therefore, the video-based localization method is generally combined with the RF-based or magnetic-based localization method to obtain additional information, i.e., the rotation of the capsule around the longitudinal axis [
7,
8] or the speed of the capsule [
9], to enhance the overall tracking process of the capsule.
The second method is based on conventional RF-tracking methods (e.g., received signal strength (RSS) [
10] and time of arrival (TOA) [
11,
12]). Herein, the propagation properties of an electromagnetic wave are utilized to localize the capsule endoscope. Geng et al. (2016) [
13] conducted a comprehensive study of the posterior Cramer–Rao lower bound using the RSS and TOA approaches for the localization of WCE. They determined that accuracy in the mm-range is theoretically achievable when the RF-based localization method is combined with the video-based localization method. Ito et al. [
14] proposed a hybrid RF method where the average relative permittivity of a human body phantom was estimated. Subsequently, this information was used to locate the capsule with the TOA-method. In this way, accuracy in the mm-range was achieved. However, in the aforementioned studies, the human body phantom was simplified. Because the propagation parameters of the human body vary significantly for the different layers of tissues and different patients, achieving localization accuracy in the mm-range with the RF-based method in real measurements is very challenging.
The third method is the magnetic field-based localization of WCE capsules, which showed the best localization performance [
3,
5]. Well-established magnetic localization methods are either based on transmitting a magnetic signal using a coil [
15,
16,
17,
18,
19] or a permanent magnet [
4,
20,
21,
22,
23]. Permanent magnets as a magnetic field source are integrated into the capsule. The generated static magnetic field is sensed by a magnetic sensor array on the body surface of a patient. When a coil is used as a magnetic field source, a receiver coil [
15] or magnetometer [
18] is integrated into the capsule. When a coil is used as a magnetic field source outside the body, the number of sensors/receiving coils is restricted due to the limited space within the capsules. Since magnetic field-based localization is based on solving a non-linear equation system, the number of sensors and, therefore, equations is crucial for the localization accuracy. By integrating a permanent magnet into a capsule for WCE, promising localization results have been achieved so far. Since it is a passive magnetic field source, capsule batteries are not required for the localization process. Moreover, a larger number of sensors can be placed outside the body.
However, on the body surface, the magnetic flux density of the permanent magnet is of the same order as the geomagnetic flux density and, thus, leads to high localization errors [
24]. A straightforward approach to address this issue is to calibrate the magnetic sensor array according to the geomagnetic field [
20,
22]. However, this procedure is only valid as long as there is no relative rotation between the sensors and the Earth. Because the entire WCE procedure takes several hours, sensor calibration is not practicable as a patient wearing the sensor system cannot be expected to keep still during the entire examination.
Shao et al. (2019) [
4] proposed a novel static magnetic localization method for capsule endoscopes to prevent the interference of the geomagnetic field. A wearable localization system consisting of 16 magnetic sensors with two additional magnetic sensors for geomagnetic compensation was applied. The additional sensors were mounted on the back and chest of a patient. Because of the considerable distance from the intestine, the two additional sensors were assumed to measure only the geomagnetic flux density. Therefore, by subtracting the flux density of the two additional sensors from the measured values of the 16 sensors, the geomagnetic flux density was canceled. However, the orientation error varied significantly when the localization setup was rotated.
Dai et al. (2019) [
25] applied an inertial sensor-based geomagnetic compensation approach for magnetic tracking of a capsule endoscope. The inertial sensor was used to separate the three components of the geomagnetic field from the permanent magnet field. Although this approach is useful to remove geomagnetic components from the permanent magnet field, it still uses an inertial sensor, which suffers from drift error over time. In Dai’s study, the localization system stability was tested only for a short time interval of approximately 90 s. This is particularly problematic if the relatively long duration of a diagnosis with WCE is considered.
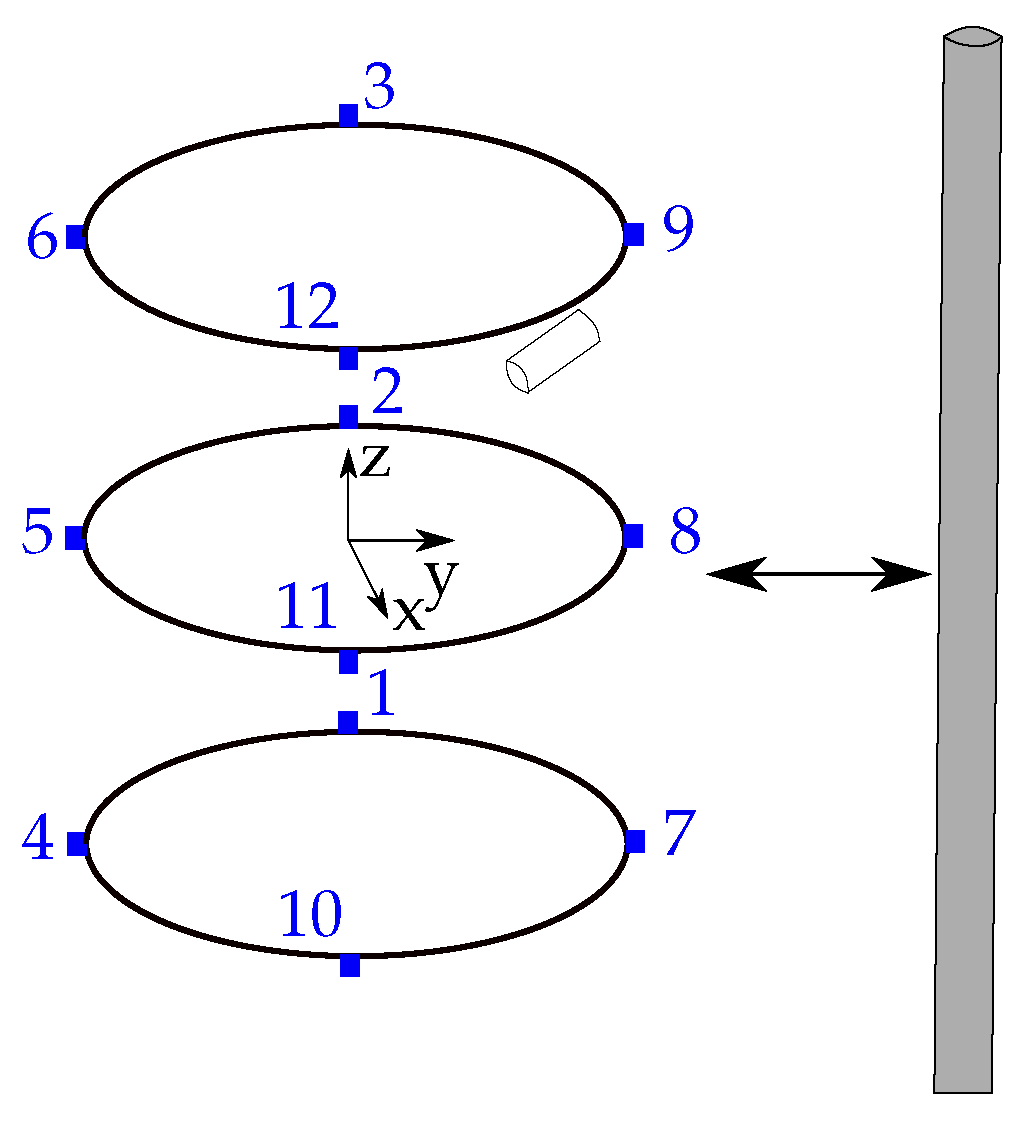
In our previous work [
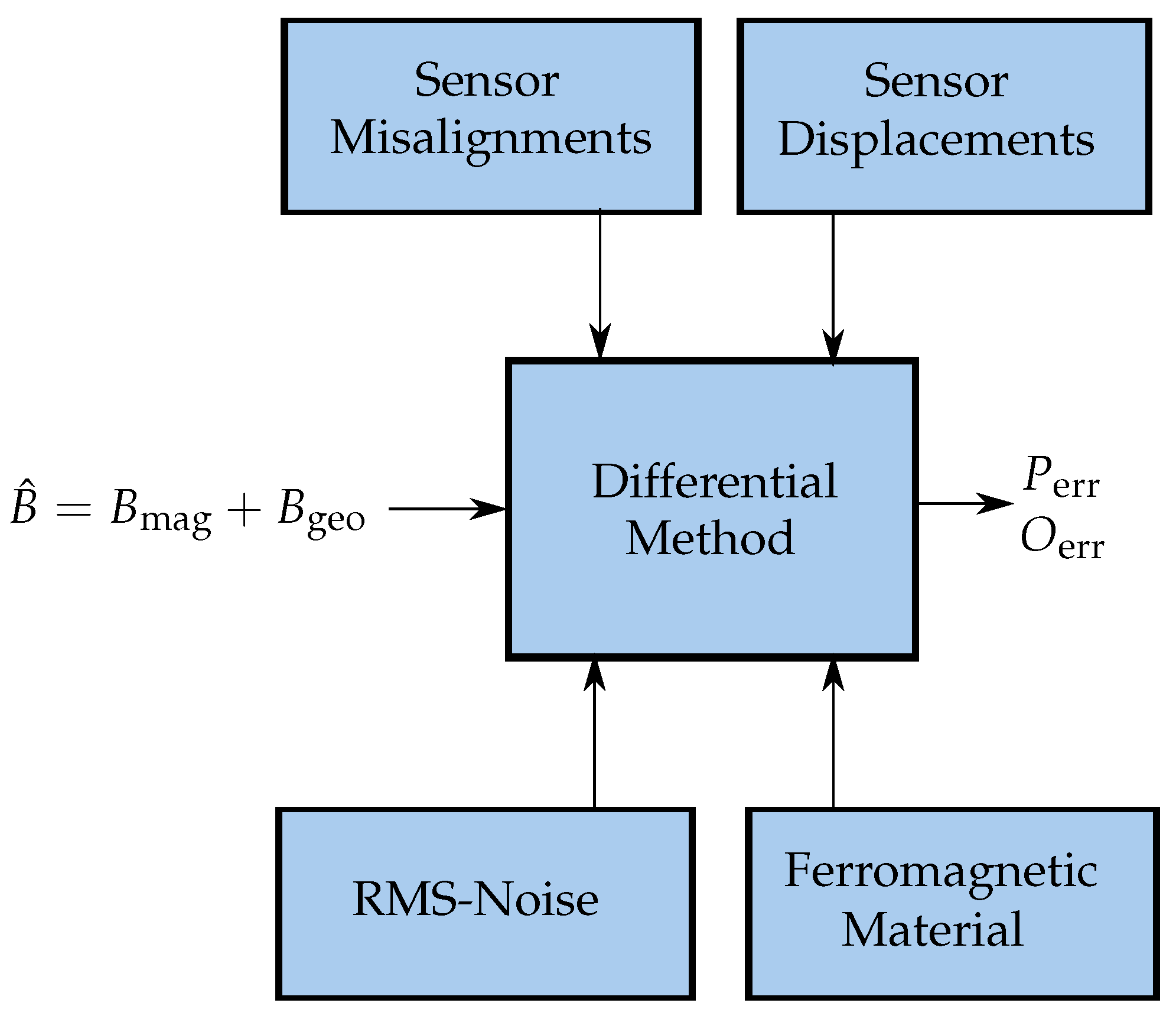
26], we optimized our novel differential static magnetic localization method with geomagnetic compensation and evaluated it in numerical simulations. The proposed method was based on a localization system, consisting of three stable rings with four magnetic sensors mounted on each ring. The sensors were grouped into pairs, consisting of identically orientated sensors, and by subtracting the measured values of those sensors, the geomagnetic flux density was cancelled out. The main goal of our proposed method was to enable a patient to leave the hospital during the relatively long diagnosis. Therefore, the intended use-cases of the proposed differential localization method for capsule endoscopes are daily life situations of a patient. Therefore, in this study, we investigated the feasibility of the proposed method under more realistic scenarios, which represent daily life activities. The non-idealities of the localization system, such as misalignment and displacement, as well as the root-mean-squared (RMS)-noise of the sensors were considered. Moreover, the influence of the ferromagnetic material on localization performance was investigated. Besides, the entire system was rotated while the resulting localization accuracy was determined.
5. Discussion
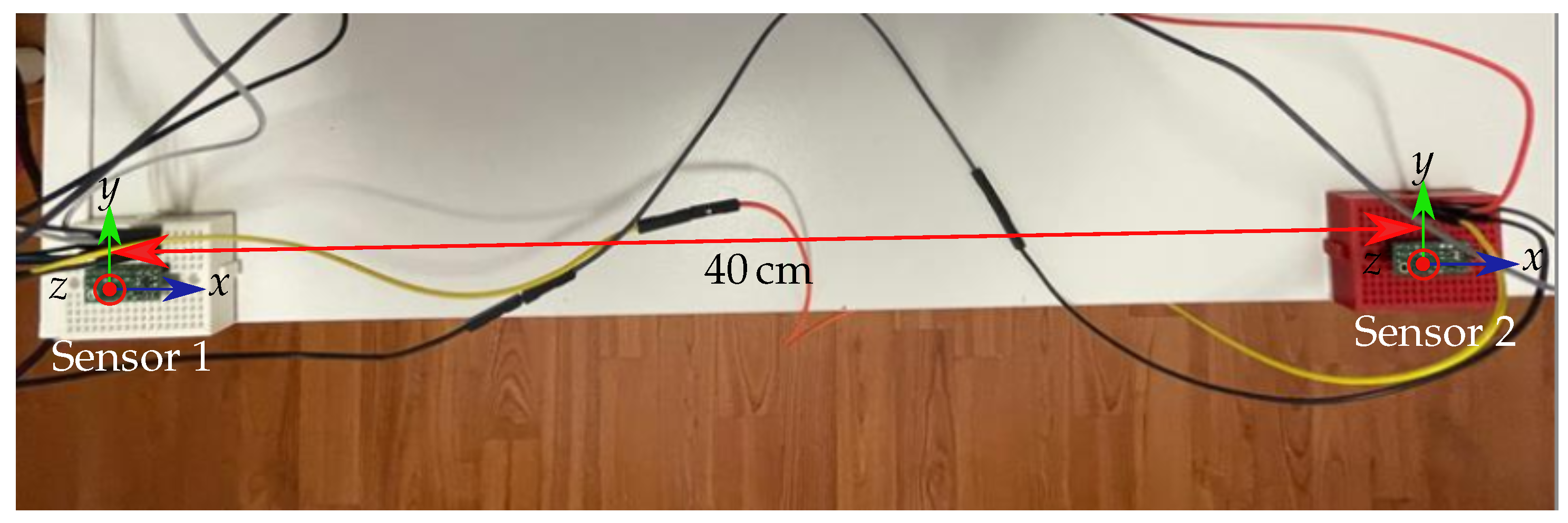
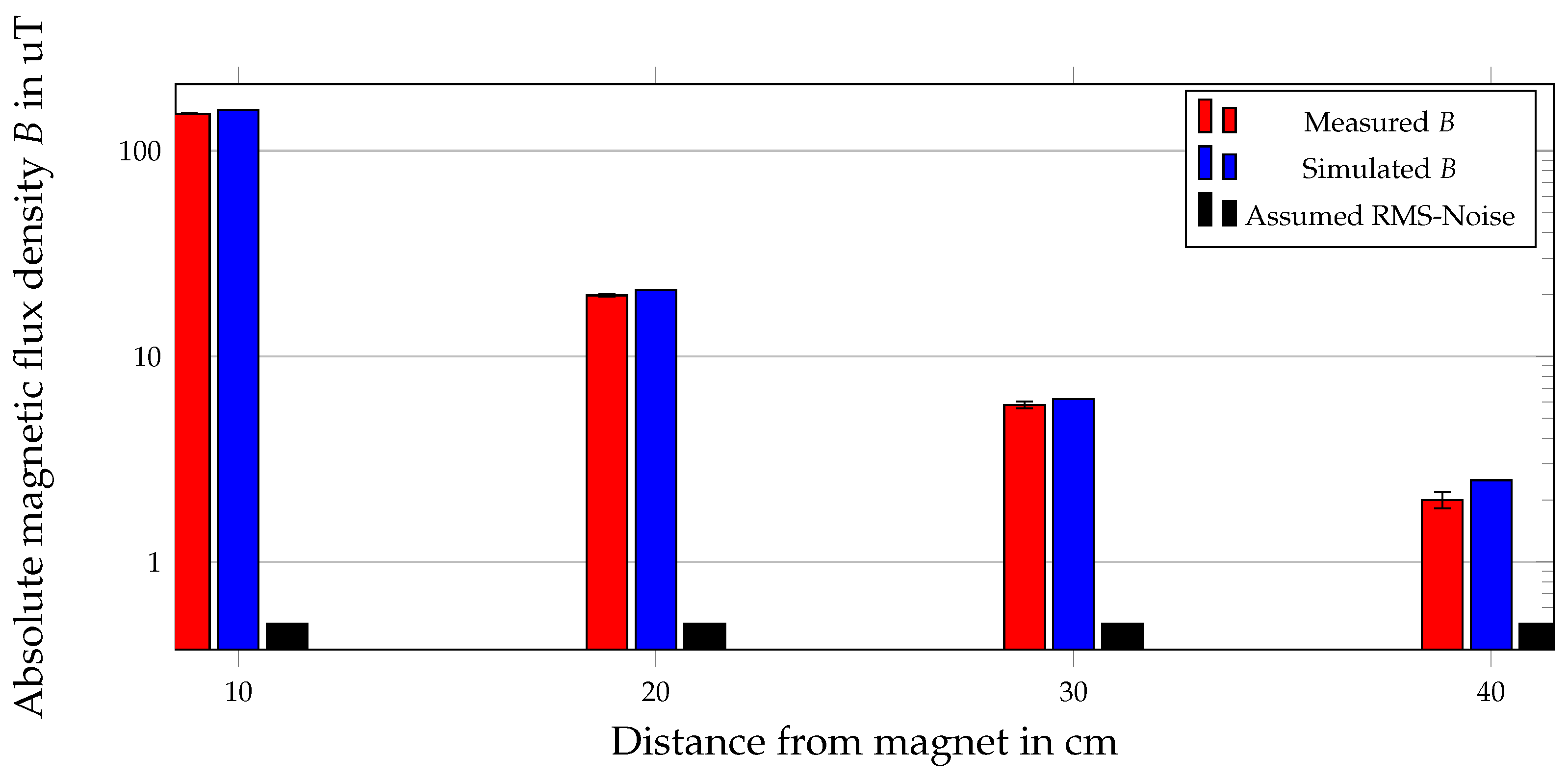
In this study, the differential geomagnetic compensation method was experimentally validated by comparing the measured values of the geomagnetic flux density of two LSM303D sensors with a distance of 40 cm to each other. The results revealed that the difference between the measured values of the two sensors was not higher than 1.3 µT when the two sensors were aligned and there was no nearby ferromagnetic material. Therefore, the measured difference was approximately of the same order as the assumed RMS-noise, and the assumption of the homogeneous geomagnetic flux density for the relatively small localization setup (33 cm × 40 cm × 20 cm) was valid. Moreover, a rotation of Sensor 2 by approximately 5° resulted in a maximal difference in the measured
B of approximately 3 µT. By comparing the magnetic flux density of a permanent magnet (
Figure 11) with this difference, it was concluded that the impact of misalignment significantly depended on the distance of the corresponding sensor to the magnet. Hence, the maximal difference of 3 µT was approximately of the same order as
B of a permanent magnet for a distance from the magnet to a sensor larger than 20 cm. The difference in the measured values of the two sensors was highest for a ferromagnetic heating element in the proximity of the two sensors. Sensor 2 was closer to the heating element; thus, its magnetic flux density was significantly more distorted than that of Sensor 1. The maximal difference in
B for that scenario was approximately 5 µT. Therefore, the ferromagnetic material in the proximity of the sensor setup yielded a high potential of error for the proposed differential method. This experimental study revealed that the proposed differential method is feasible; however, the sensors must be aligned and ferromagnetic material in the proximity of the setup avoided.
Moreover, a simulation-based study was conducted, where the non-idealities of all sensors were considered and the localization performance for the different scenarios was determined. Besides, the localization performance for different magnet lengths was evaluated. Finally, the proposed localization system was rotated to consider daily life situations of a patient. In the following, the results of the systematic evaluation of the system are discussed.
First, the sensor positions were randomly displaced with different maximal displacement values. The position and orientation errors increased approximately linearly with maximal random displacement. Compared to the results for ideal conditions, the mean and STD values of the position and orientation errors were increased by two orders in magnitude. Therefore, the margins of error were significantly increased when different magnet orientations were applied and the sensors randomly displaced. The random displacement of sensors had the smallest impact on the differential method. Thus, the maximal position and orientation errors by applying random displacement were approximately four times smaller than those of the random misalignment. The maximal position and orientation errors for the ferromagnetic material in the proximity of the system were even about 50 and 25 times higher than those of the random displacement. This is because the geomagnetic flux density can be assumed as homogeneous for the relatively small localization system, which was also shown in the results of the experimental study of
Section 4.1. Therefore, the elimination of the geomagnetic flux density at the sensors still works if sensors are displaced. The resulting localization errors were due to the unknown sensor positions.
Subsequently, the sensors were randomly misaligned. The position and orientation errors increased linearly for random misalignment of the sensors. The slope of the error curves was steeper than those of the random displacement of sensors. The results revealed that the orientation of the sensors significantly affects the localization performance since the mean and STD values of the position and orientation errors were increased by up to two orders in magnitude compared with the results for ideal conditions. Because the measured values of sensors corresponding to a pair were subtracted, misalignment of those two sensors led to a change in the components of the geomagnetic flux density measured at the sensors. This was also validated experimentally. The maximal measured difference in B of the two considered sensors was approximately 3 µT. Therefore, for a practical implementation, it is recommended to keep the misalignment of a pair of sensors below 5°.
Moreover, an RMS-noise of 500 nT was applied to each sensor measurement, and thus, the mean and STD values of the position and orientation errors were increased by one order in magnitude. Therefore, the influence of the RMS-noise was significantly smaller compared with the other evaluated non-idealities. However, it should be noted that the mean distance from the magnet to the sensors was 21.8 cm ± 5.9 cm. In
Section 4.3.3, it was revealed that the impact of the RMS-noise significantly depended on the distance from a sensor. Since the mean distance from the magnet to the sensors was approximately 22 cm, the position and orientation errors were relatively small. Compared with the planar sensor array proposed in [
25], our localization setup yielded the advantage of higher spatial diversity, and therefore, the mean distance from the magnet to the sensors was relatively stable, while it significantly depended on the magnet position for a planar array. The measured and the simulated
B were in good agreement; for a distance of 40 cm, the RMS-noise had a significant impact on the measured values, and therefore, the deviation from the simulated
B increased. Overall, the simulated
B was higher than the measured one, and this was due to the magnetization of 1150 kA/m, which was assumed in the COMSOL simulations. The real magnetization of the magnet was determined by the manufacturing tolerance.
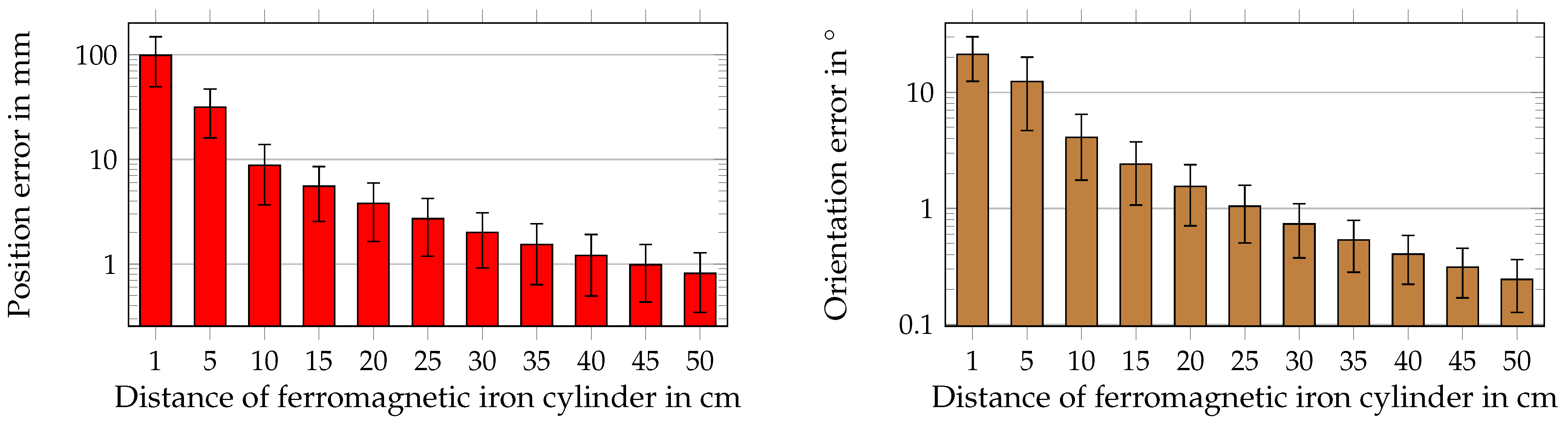
Next, an iron cylinder and heating element were placed in the proximity of the sensor rings. The results showed that a ferromagnetic cylinder with a distance below 30 cm increased the position and orientation errors up to three orders in magnitude. For an iron cylinder at a distance of 50 cm, the position and orientation errors were below 1 mm and 0.3°, respectively. In contrast, the position error was significantly lower with approximately 0.4 mm in the case that a heating element was placed 50 cm next to the setup. This can be explained by the theory of the demagnetization factor [
34]. The cylinder was
z-oriented and had a smaller cross-section than the heating element. However, the length in the
z-direction was approximately the same for the heating element and cylinder. Therefore, compared with the heating element, the cylinder had a smaller demagnetization factor and, thus, was more strongly magnetized by the geomagnetic field. Therefore, the cylinder led to a higher distortion of the geomagnetic field. The effect of the ferromagnetic material on the proposed differential method was also experimentally investigated. A representative sensor pair was placed at a distance of 50 cm next to a heating element. The difference of the measured values of the two LSM303D sensors was up to 5.3 µT. Besides, we evaluated
B generated by a permanent magnet and compared it with the difference in measured values of the sensor pair. It was concluded that the difference of several µT would have a significant impact on the localization performance when the distance from the corresponding sensor to the magnet was larger than 20 cm. In a real-world application, the localization system must be kept away by at least 30 cm from the ferromagnetic material. Scenarios like driving a car or taking an elevator are not suitable for the proposed method as long as the magnetic sensors are not calibrated for these involvements. Overall, the ferromagnetic material in the proximity of the localization system yielded potentially the highest localization errors compared to the other evaluated cases. In the presence of magnetic fields, a ferromagnetic material like iron leads to soft magnetic disturbance, which is inhomogeneous. Therefore, it disturbs the geomagnetic flux density, as well as the measured flux density from the magnet. Since the differential localization method is only suitable for eliminating interference whose components are equal for all sensors, a ferromagnetic material leads to high errors. Moreover, the distance from a sensor to ferromagnetic objects significantly affects the order of magnitude of the localization error. At first sight, it seems unexpected that the localization error in the case of the nearby heating element or cylinder was smaller than for the misalignment of sensors since the difference in the measured values of the representative sensor pair was higher for the heating element than for the misalignment of 5°. However, it should be noted that in the simulation-based systematic study, all 12 sensors were randomly misaligned, and in the case of the nearby heating or ferromagnetic cylinder, only the measured values of the three closest sensors were significantly distorted.
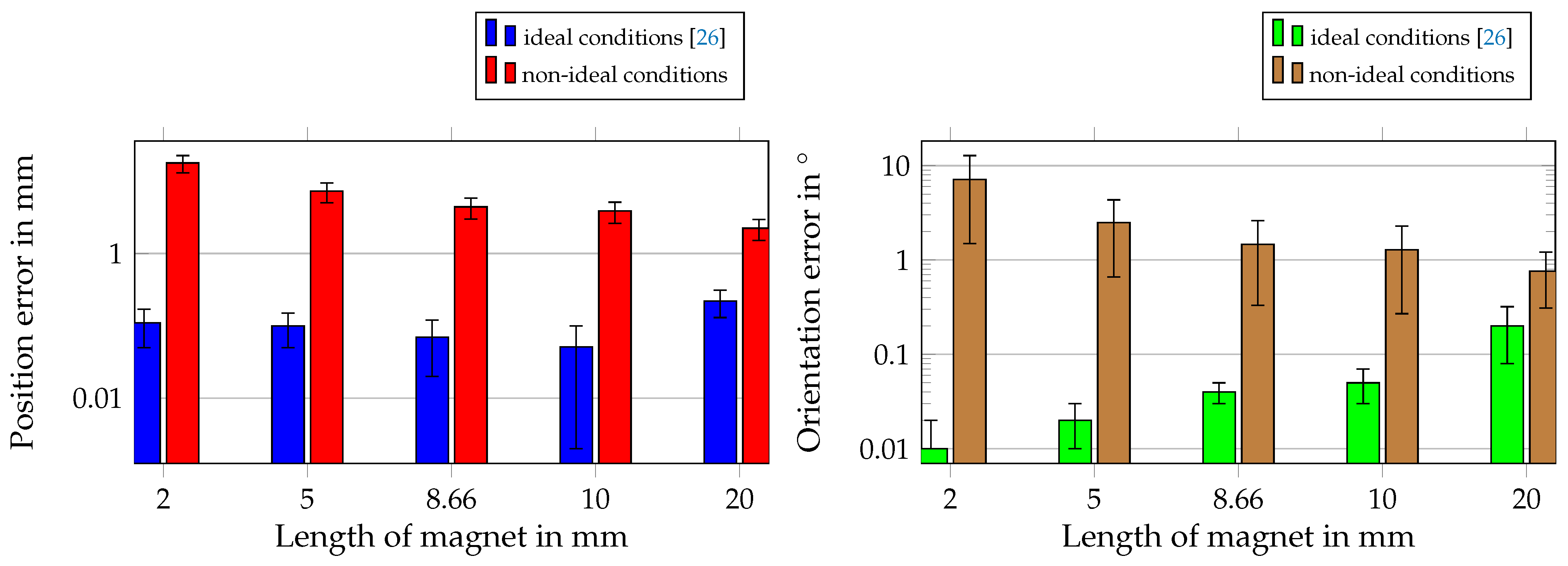
As a next step, all aforementioned distortions were considered simultaneously, and the length of the magnet was varied to evaluate the system under more realistic conditions. In [
26], we already varied the diameter-to-length ratio; however, ideal conditions were applied, and the ratio had no significant influence on the localization performance. Therefore, we assumed that a magnet of length 2 mm would lead to a sufficient localization performance. However, under non-ideal conditions, the length of the magnet should be at least 5 mm to achieve a sufficient localization performance.
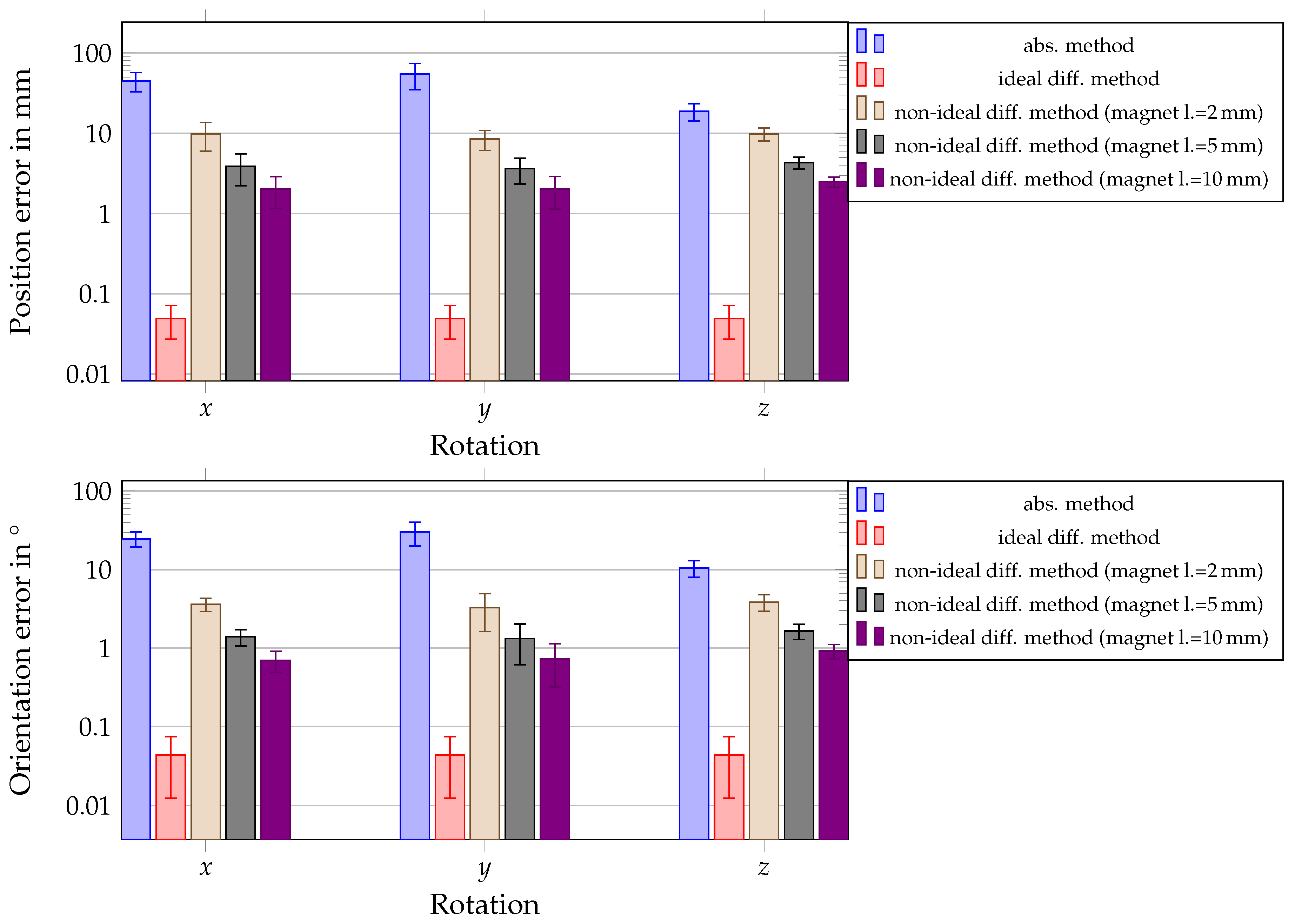
In the last step of the systematical evaluation of the proposed differential localization method, the entire system was rotated to test the capability of the system for daily life situations of a patient. The absolute localization method results were compared with those of the differential method under ideal and non-ideal conditions. Moreover, the magnet length was varied when the differential method was applied under non-ideal conditions. The results showed once more that a magnet of length 2 mm led to high position and orientation errors of approximately 10 mm and 3°, respectively, when non-ideal conditions were applied on the differential method. For a magnet of a length of 5 mm and above, the position and orientation errors were significantly smaller, and the margins of error overlapped. Therefore, for a real setup, it is suggested to use a magnet with a diameter of 10 mm and at least a length of 5 mm to achieve a reliable localization performance for non-ideal conditions and the rotation of the system. Overall, these results demonstrated that the proposed system can achieve a reliable localization accuracy for a wearable localization system for capsule endoscopes. The results of this systematic performance evaluation of our proposed system will significantly aid in designing an experimental setup of the proposed differential method.
Comparison of State-of-the-Art Localization Methods for Capsule Endoscopes
In the following, the proposed differential method is compared with state-of-the-art localization methods for capsule endoscopes. The localization accuracy of the corresponding methods is summarized in
Table 5.
In the literature, quasi-static and static magnetic localization methods for WCE have been proposed. The differential method is assigned to the latter and, therefore, shall be firstly compared to static methods. Shao et al. (2019) [
35] proposed a method for geomagnetic compensation for capsule endoscopes. Herein, two magnetic sensors were fixed on the chest and back of a patient in addition to the sensor array around the abdomen. Due to the distance between the sensor array and the additional sensors, it was assumed that they measured only the geomagnetic flux density. Therefore, by subtracting these measured values from the measured values at the sensor array, the geomagnetic flux density was eliminated. The localization system was rotated, and the achieved mean position and orientation errors were approximately 10 mm and 12°, respectively. However, the results revealed that especially the orientation error deviated approximately in the range of 10° for different rotations of the system. This could result from the additional sensors, which were mounted on the chest and back, and therefore, their orientation was not stable. The results of our study showed that the proposed differential localization system is significantly more robust and accurate for the application of a wearable localization system if the magnet length is at least 5 mm.
Dai et al. (2019) proposed another geomagnetic compensation method for wireless capsule endoscopy [
25]. In Dai’s approach, an inertial measurement unit (IMU) was used together with a magnetic sensor array for the localization of a permanent magnet. The IMU data were used to estimate the posture of the magnetic array and, therefore, separate the geomagnetic flux density from the magnetic flux density generated by the permanent magnet when the system was rotated. Thereby, position and orientation errors of 3.89 mm and 5.5°, respectively, were experimentally achieved. The position error of their proposed method is comparable to our proposed differential method for a magnet of a length of 5 mm. However, for a length of 10 mm, our system’s performance was significantly better. The results of our study, moreover, showed that the orientation error was significantly lower and stable for our proposed system. Furthermore, an additional IMU usage for geomagnetic compensation has to be tested for the average diagnosis duration of WCE, which is around 8 h. The influence of the drift error was not fully considered in Dai’s study. Moreover, orientation estimation with an IMU and without the usage of a magnetometer is limited in accuracy.
A coil-based geomagnetic compensation method was proposed by Shimizu et al. (2020) [
18]. Herein, an endoscopy capsule was equipped with magnetic and acceleration sensors for estimating the orientation and position of a capsule. A coil as a magnetic field source was integrated into a wearable neck corset for the patient. By switching the coil on and off, the geomagnetic field was canceled in the measured values. The achieved position and orientation errors were 10 mm and 5°, respectively. Compared with our proposed method, this method performed significantly worse. Moreover, the batteries of a capsule endoscope have a limited capacity. Therefore, the batteries cannot provide the integrated sensors and camera with power for the entire diagnosis procedure. Furthermore, only an acceleration sensor was used for estimating the posture of the capsule. Thus, this approach will face the same problem with drift error over time as Dai’s approach. This method should be tested within an appropriate time interval of 8 h.
On the other hand, quasi-static magnetic localization methods are based on alternating-current signals in the kilohertz range generated by a coil, and thus, no geomagnetic compensation method is required. The magnetic field generated by a coil outside the body was sensed by receiving coils [
15,
19] integrated into the capsule. In this way, position and orientation errors below 3 mm [
15,
19] and 0.2° [
19] were reported. The results showed that quasi-static magnetic localization methods are competitive with static methods. However, since the magnetic field is measured inside the capsule, the number of sensors/receiving coils is inherently restricted. Moreover, Yang et al. [
19] used a single uni-axial receiving coil; therefore, the localization performance significantly depended on the orientation of the capsule.
Finally, the proposed method was compared with RF-based localization methods for the application of WCE. The RF-based localization methods utilize the transmission of a video stream for the localization. Therefore, the frequency range of these methods is in the megahertz to gigahertz range. Multiple antennas were arranged outside the body for localization to sense the RF signal from the capsule. The achieved position error by Khan et al. [
12], as well as Barbi et al. [
36] by using RF-based methods was for both studies approximately 10 mm. The main source of error for the RF-based methods is the inhomogeneous permittivity of human tissue, which differs for different patients.
For a reliable diagnosis of the gastrointestinal tract, the capsule endoscopy must be accurately tracked for a relatively long duration of approximately 8 h. By considering the size of a capsule, which is approximately 32 mm × 12 mm, the position error should be at least smaller than 5 mm to resolve the capsule. Moreover, the application of WCE is intended to enable the patient to leave the hospital during the diagnosis. Therefore, the use-cases of WCE are daily life situations of a patient. Hence, a localization system for WCE should be in particular wearable and robust. The proposed differential method fulfills these requirements and is therefore the next step towards precise localization of capsule endoscopes within the daily life of a patient.
6. Conclusions
In this study, the feasibility of the proposed differential method was experimentally validated since the measured difference between two equally orientated sensors was approximately of the same order as the root-mean-squared sensor noise. The rest of the study was simulation based. The influence of non-idealities on our proposed differential method for localizing capsule endoscopes was systematically investigated. Hence, the influence of sensor displacement, misalignment, and root-mean-squared noise on the localization performance was investigated individually. Moreover, the influence of ferromagnetic material in the proximity of the proposed system was considered. The results revealed that ferromagnetic material and misalignment of sensors lead to the highest localization errors. Moreover, to test the localization performance for daily life situations, the entire system was rotated when the sensors were displaced, misaligned, and RMS-noise was added to each measurement. Additionally, the magnet length was varied. The results revealed that the mean position and orientation errors were increased from below 0.1 mm and 0.1° to several millimeters and degrees, by applying non-ideal conditions. For a magnet of length 5 mm, the position and orientation errors were approximately 4 mm and 1°, respectively, and for a length of 10 mm approximately 2 mm and 1°, respectively. Compared with state-of-the-art geomagnetic compensation methods for the localization of capsule endoscopes, the proposed localization method was significantly more robust and accurate for a magnet length of 10 mm. For a magnet of length 5 mm, the localization performance was still reliable and competitive with state-of-the-art methods.
Moreover, the results showed that the localization system must be kept away from ferromagnetic materials as much as possible and the position and orientation errors depend on the geometry and orientation of the ferromagnetic object, as well as the relative position of the capsule within the localization setup. Therefore, use-cases like driving a car or taking an elevator or situations in which the sensor setup is misaligned are critical for the proposed method. In contrast, the displacement of sensors has no significant impact on the localization performance. Furthermore, it was concluded that the impact of the root-mean-squared noise of magnetic sensors significantly depends on the distance from the magnet to a sensor. This knowledge will aid in designing an optimal localization setup for real measurements.


 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}