
Flexible and Transparent Polymer-Based Optical Humidity Sensor †

 and
and 
Abstract
1. Introduction
2. Materials and Methods
3. Results and Discussion
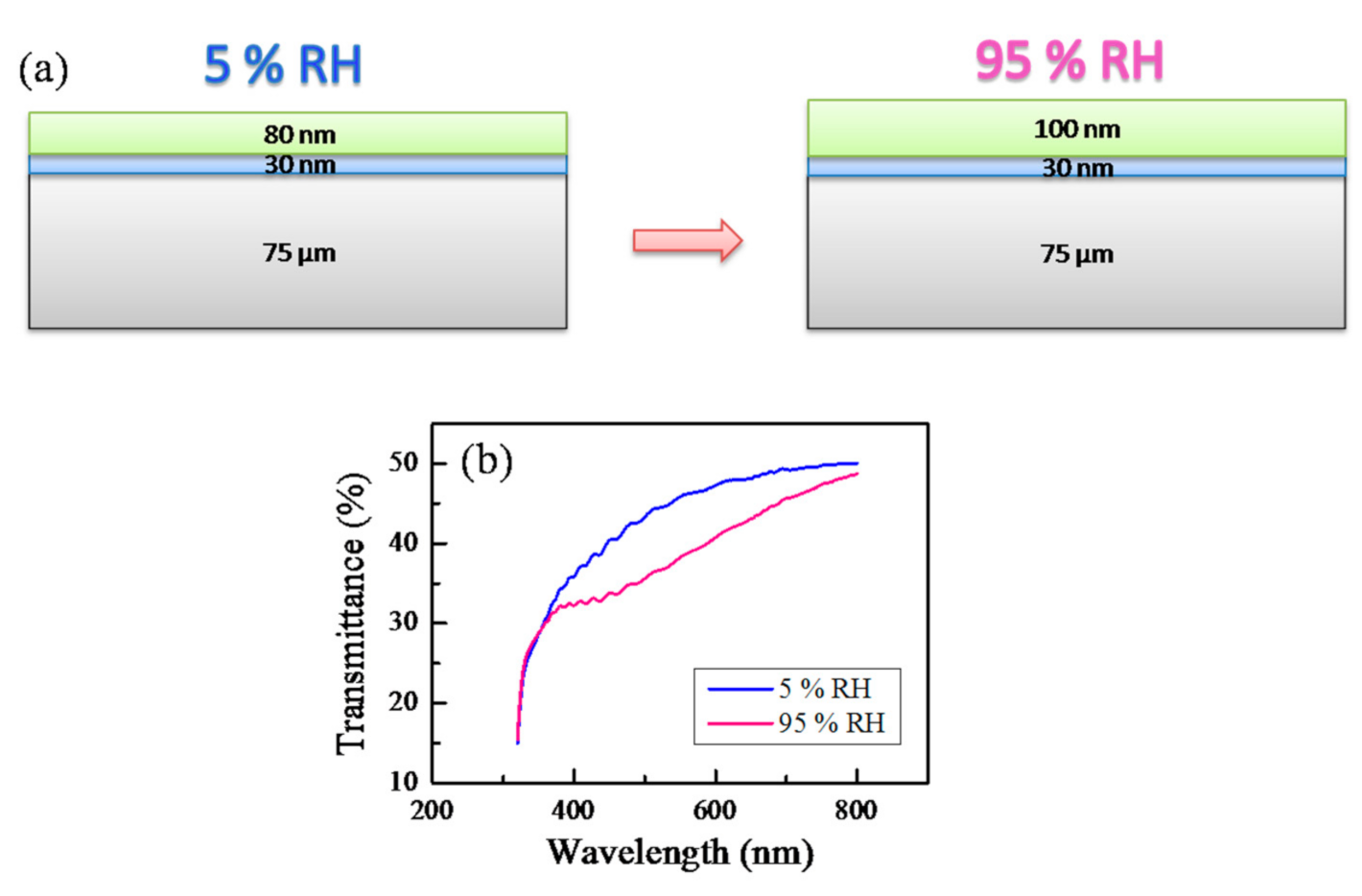
3.1. Optical Properties and Surface Morphology
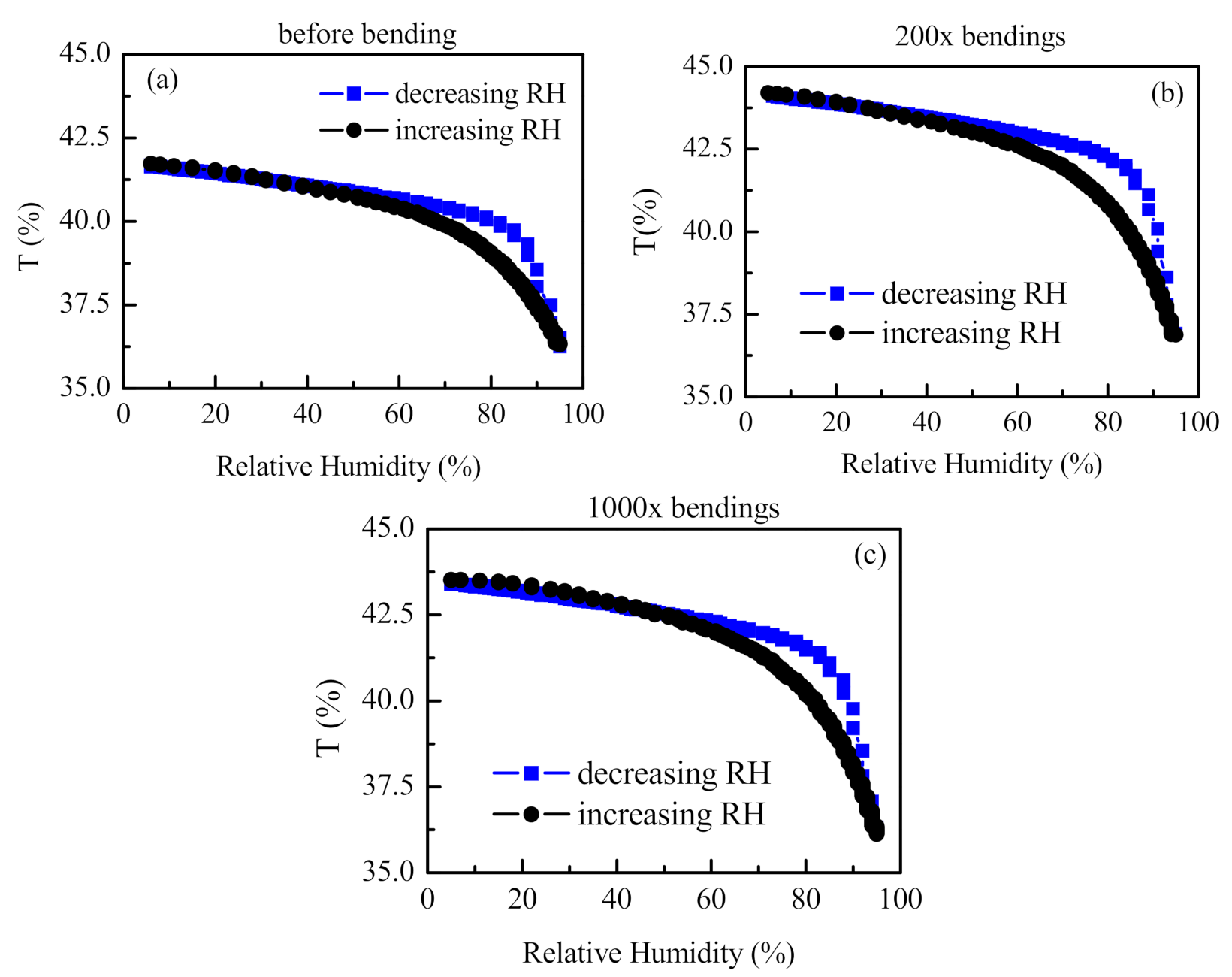
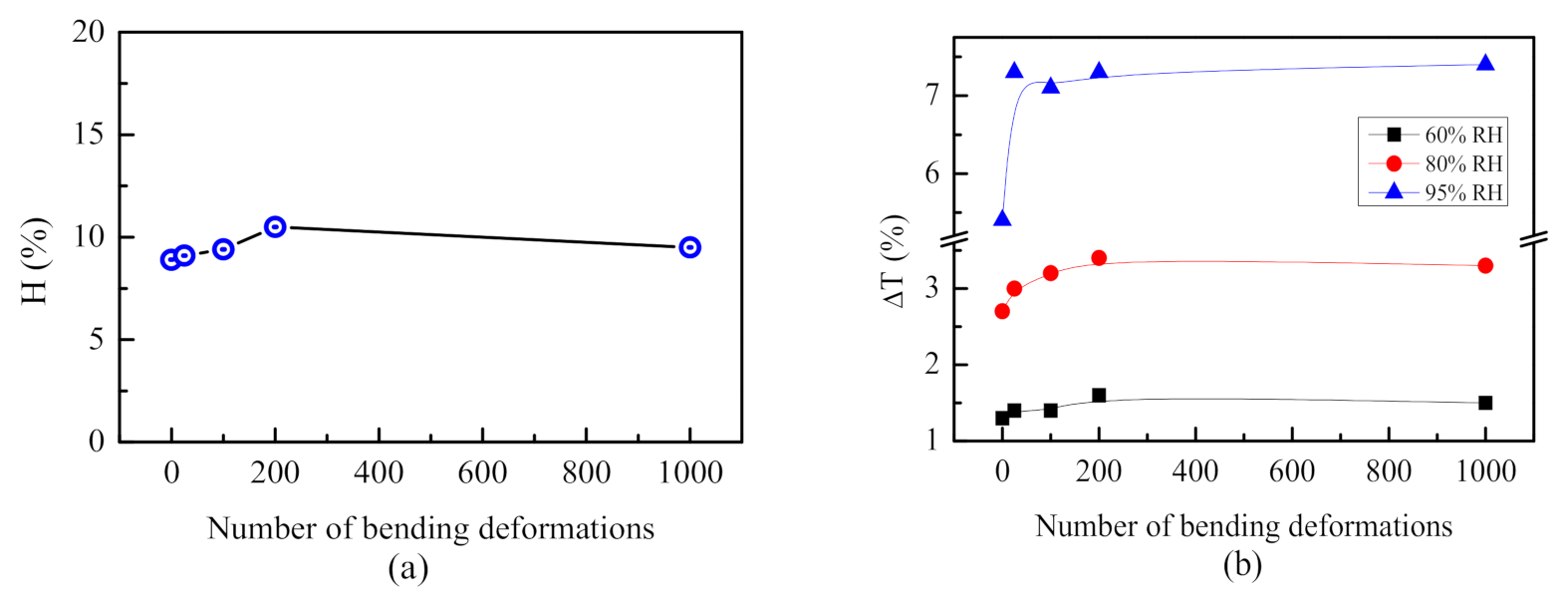
3.2. Humidity Sensing Experiments
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jung, H.S.; Verwilst, P.; Kim, W.Y.; Kim, J.S. Fluorescent and colorimetric sensors for the detection of humidity or water content. Chem. Soc. Rev. 2016, 45, 1242–1256. [Google Scholar] [CrossRef]
- Burratti, L.; Casalboni, M.; De Matteis, F.; Pizzoferrato, R.; Prosposito, P. Polystyrene Opals Responsive to Methanol Vapors. Materials 2018, 11, 1547. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Zhong, J.; Fang, Y.; Wang, J.; Huang, G.; Cui, X.; Mei, Y. Roll up polymer/oxide/polymer nanomembranes as a hybrid optical microcavity for humidity sensing. Nanoscale 2014, 6, 13646–13650. [Google Scholar] [CrossRef] [PubMed]
- Naydenova, I.; Jallapuram, R.; Toal, V.; Martin, S. A visual indication of environmental humidity using a color changing hologram recorded in a self-developing photopolymer. Appl. Phys. Lett. 2008, 92, 031109. [Google Scholar] [CrossRef]
- Naydenova, I.; Grand, J.; Mikulchyk, T.; Martin, S.; Toal, V.; Georgieva, V.; Thomas, S.; Mintova, S. Hybrid Sensors Fabricated by Inkjet Printing and Holographic Patterning. Chem. Mater. 2015, 27, 6097–6101. [Google Scholar] [CrossRef]
- Zheng, Y.Q.; Wang, L.L.; Zhao, L.J.; Wang, D.Y.; Xu, H.; Wang, K.; Han, W. A Flexible Humidity Sensor Based on Natural Biocompatible Silk Fibroin Films. Adv. Mater. Technol. 2021, 6, 2001053. [Google Scholar] [CrossRef]
- Wei, M.; Gao, Y.; Li, X.; Serpe, M.J. Stimuli responsive polymers and their applications. Polym. Chem. 2017, 8, 127–143. [Google Scholar] [CrossRef]
- Liu, Z.; Yin, Z.; Wang, J.; Zheng, Q. Polyelectrolyte Dielectrics for Flexible Low-Voltage Organic Thin-Film Transistors in Highly Sensitive Pressure Sensing. Adv. Funct. Mater. 2018, 29, 1806092. [Google Scholar] [CrossRef]
- Delipinar, T.; Shafique, A.; Gohar, M.S.; Yapici, M.K. Fabrication and Materials Integration of Flexible Humidity Sensors for Emerging Applications. ACS Omega 2021, 6, 8744–8753. [Google Scholar] [CrossRef]
- Choi, S.J.; Kim, S.J.; Kim, I.D. Ultrafast optical reduction of graphene oxide sheets on colorless polyimide film for wearable chemical sensors. NPG Asia Mater. 2016, 8, e315. [Google Scholar] [CrossRef]
- Liu, S.; Lin, Y.; Wei, Y.; Chen, S.; Zhu, J.; Liu, L. A high performance self-healing strain sensor with synergetic networks of poly(e-caprolactone) microspheres, graphene and silver nanowires. Compos. Sci. Technol. 2017, 146, 110–118. [Google Scholar] [CrossRef]
- Kim, Y.G.; Tak, Y.J.; Kim, H.J.; Kim, W.G.; Yoo, H.; Kim, H.J. Facile fabrication of wire-type indium gallium zinc oxide thin-film transistors applicable to ultrasensitive flexible sensors. Sci. Rep. 2018, 8, 5546. [Google Scholar] [CrossRef] [PubMed]
- Yun, S.-O.; Cho, H.-W.; Suh, J.-H.; Park, J.-H.; Choi, B.G.; Lee, T.J.; Kweon, S.J.; Lee, J.K.; Seo, C.-H.; Yoo, H.-J.; et al. Flexible pH sensor and system fabricated using PET film. IEEE Sens. 2017, 1–3. [Google Scholar] [CrossRef]
- Shin, M.; Yoon, J.; Yi, C.; Lee, T.; Choi, J.W. Flexible HIV-1 Biosensor Based on the Au/MoS2 Nanoparticles/Au Nanolayer on the PET Substrate. Nanomaterials 2019, 26, 1076. [Google Scholar] [CrossRef]
- Hanif, A.; Trung, T.Q.; Siddiqui, S.; Toi, P.T.; Lee, N.E. Stretchable, Transparent, Tough, Ultrathin, and Self-limiting Skin-like Substrate for Stretchable Electronics. ACS Appl. Mater. Interfaces 2018, 10, 27297–27307. [Google Scholar] [CrossRef]
- Chen, J.; Zheng, J.; Gao, Q.; Zhang, J.; Zhang, J.; Omisore, O.M.; Wang, L.; Li, H. Polydimethylsiloxane (PDMS)-Based Flexible Resistive Strain Sensors for Wearable Applications. Appl. Sci. 2018, 8, 345. [Google Scholar] [CrossRef]
- Passlack, U.; Elsobky, M.; Mahsereci, Y.; Scherjon, C.; Harendt, C.; Burghartz, J.N. A Flexible Chip-Film Patch and a Flexible Strain Gauge Sensor Suitable for a Hybrid Systems-in-Foil Integration. IEEE Sens. J. 2021. [Google Scholar] [CrossRef]
- Pierre, A.; Doris, S.E.; Lujan, R.; Street, R.A. Monolithic Integration of Ion-Selective Organic Electrochemical Transistors with Thin Film Transistors on Flexible Substrates. Adv. Mater. Technol. 2018, 4, 1800577. [Google Scholar] [CrossRef]
- Xu, H.; Liu, J.; Zhang, J.; Zhou, G.; Luo, N.; Zhao, N. Flexible Organic/Inorganic Hybrid Near-Infrared Photoplethysmogram Sensor for Cardiovascular Monitoring. Adv. Mater. 2017, 29, 1700975. [Google Scholar] [CrossRef]
- Su, Y.; Ma, C.; Chen, J.; Wu, H.; Luo, W.; Peng, Y.; Luo, Z.; Li, L.; Tan, Y.; Omisore, O.M.; et al. Printable, Highly Sensitive Flexible Temperature Sensors for Human Body Temperature Monitoring: A Review. Nanoscale Res. Lett. 2020, 15, 200. [Google Scholar] [CrossRef]
- Khanikar, T.; Singh, V.K. PANI-PVA composite film coated optical fiber probe as a stable and highly sensitive pH sensor. Opt. Mater. 2019, 88, 244–251. [Google Scholar] [CrossRef]
- Mahapure, P.D.; Aiyer, R.C.; Gosavi, S.W.; Adhyapaka, P.V.; Amalnerkara, D.P. Studies on self supported film of PMMA, PMMA-PVA and PMMA-(PVAAg) nano composite for highly linear response over wide range of humidity. In Proceedings of the 2012 1st International Symposium on Physics and Technology of Sensors (ISPTS-1), Pune, India, 7–10 March 2012; pp. 244–248. [Google Scholar] [CrossRef]
- Zhao, Y.; Tong, R.J.; Chen, M.Q.; Xia, F. Relative humidity sensor based on hollow core fiber filled with GQDs-PVA. Sens. Actuators B Chem. 2019, 284, 96–102. [Google Scholar] [CrossRef]
- Cajlakovic, M.; Lobnik, A.; Werner, T. Stability of new optical pH sensing material based on cross-linked poly(vinyl alcohol) copolymer. Anal. Chim. Acta 2002, 455, 207–213. [Google Scholar] [CrossRef]
- Gao, X.; Liu, W.; Liu, H.; Huang, M.; He, S.; Zhang, M.; Hua, Z.; Zhu, C. Morphology and transport characterization of solution-processed rubrene thin films on polymer-modified substrates. Sci. Rep. 2020, 10, 12183. [Google Scholar] [CrossRef]
- Du, Y.; Xu, J.; Paul, B.; Eklund, P. Flexible thermoelectric materials and devices. Appl. Mater. Today 2018, 12, 366–388. [Google Scholar] [CrossRef]
- Suzuki, M.; Takahashi, T.; Aoyagi, S. Flexible Tactile Sensor Using Polyurethane Thin Film. Micro Mach. 2012, 3, 315–324. [Google Scholar] [CrossRef]
- Takamatsu, S.; Minami, K.; Itoh, T. Fabrication of Highly Stretchable Strain Sensor Fiber by Laser Slitting of Conductive-polymer-coated Polyurethane Film for Human Hand Monitoring. Sens. Mater. 2021, 33, 1091. [Google Scholar] [CrossRef]
- Abu-Thabit, N.; Umar, Y.; Ratemi, E.; Ahmad, A.; Abuilaiwi, F.A. A Flexible Optical pH Sensor Based on Polysulfone Membranes Coated with pH-Responsive Polyaniline Nanofibers. Sensors 2016, 16, 986. [Google Scholar] [CrossRef]
- Nagel, J.; Zimmermann, P.; Schwarz, S.; Schlenstedt, K. Selective Grafting of Polyamines to Polyether Ether Ketone Surface during Molding and Its Use for Chemical Plating. Coatings 2018, 8, 333. [Google Scholar] [CrossRef]
- Ranjani, L.S.; Ramya, K.; Dhathathreyan, K.S. Compact and flexible hydrocarbon polymer sensor for sensing humidity in confined spaces. Int. J. Hydrogen Energy 2014, 39, 21343–21350. [Google Scholar] [CrossRef]
- Fasano, A.; Woyessa, G.; Stajanca, P.; Markos, C.; Stefani, A.; Nielsen, K.; Rasmussen, K.; Krebber, K.; Bang, O. Fabrication and characterization of polycarbonate microstructured polymer optical fibers for high-temperature-resistant fiber Bragg grating strain sensors. Opt. Mater. Express 2016, 6, 649–659. [Google Scholar] [CrossRef]
- Deng, W.; Huang, H.; Jin, H.; Li, W.; Chu, X.; Xiong, D.; Yan, W.; Chun, F.; Xie, M.; Luo, C.; et al. All-Sprayed-Processable, Large-Area, and Flexible Perovskite/MXene-Based Photodetector Arrays for Photocommunication. Adv. Opt. Mater. 2019, 17, 1801521. [Google Scholar] [CrossRef]
- Han, J.-W.; Kim, B.; Li, J.; Meyyappan, M. A carbon nanotube based ammonia sensor on cellulose paper. RSC Adv. 2014, 4, 549–553. [Google Scholar] [CrossRef]
- Garner, S.; Glaesemann, S.; Li, X. Ultra-slim flexible glass for roll-to-roll electronic device fabrication. Appl. Phys. A 2014, 116, 403–407. [Google Scholar] [CrossRef]
- Erb, R.M.; Cherenack, K.H.; Stahel, R.E.; Libanori, R.; Kinkeldei, T.; Münzenrieder, N.; Tröster, G.; Studart, A.R. Locally Reinforced Polymer-Based Composites for Elastic Electronics. ACS Appl. Mater. Interfaces 2012, 4, 2860–2864. [Google Scholar] [CrossRef]
- Park, S.; Park, H.; Seong, S.; Chung, Y. Multilayer Substrate to Use Brittle Materials in Flexible Electronics. Sci. Rep. 2020, 10, 7660. [Google Scholar] [CrossRef]
- MacDonald, W.A. Engineered films for display technologies. J. Mater. Chem. 2004, 14, 4–10. [Google Scholar] [CrossRef]
- Faraj, M.; Ibrahim, K.; Ali, M. PET as a plastic substrate for the flexible optoelectronic applications. Optoelectron. Adv. Mater. Rapid Commun. 2011, 5, 879–882. [Google Scholar]
- Xu, K.; Lu, Y.; Takei, K. Multifunctional Skin-Inspired Flexible Sensor Systems for Wearable Electronics. Adv. Mater. Technol. 2019, 4, 1800628. [Google Scholar] [CrossRef]
- Lazarova, K.; Bozhilova, S.; Christova, D.; Babeva, T. Poly(vinyl alcohol)—Based thin films for optical sensing of humidity. J. Phys. Conf. Ser. 2020, 1492, 012040. [Google Scholar] [CrossRef]
- Lazarova, K.; Bozhilova, S.; Ivanova, S.; Christova, D.; Babeva, T. The Influence of Annealing on Optical and Humidity Sensing Properties of Poly(Vinyl Alcohol-Co-Vinyl Acetal) Thin Films. Proceedings 2020, 42, 16. [Google Scholar] [CrossRef]
- Lazarova, K.; Bozhilova, S.; Ivanova, S.; Christova, D.; Babeva, T. Moisture-Responsive Polymer Films on Flexible Substrates for Optical Sensing of Humidity. Eng. Proc. 2020, 2, 19. [Google Scholar] [CrossRef]
- Christova, D.; Ivanova, S.; Ivanova, G. Water-soluble temperature-responsive poly(viny1 alcohol-co-vinyl acetal)s. Polym. Bull. 2003, 50, 367–372. [Google Scholar] [CrossRef]
- Lazarova, K.; Bozhilova, S.; Novakov, C.; Christova, D.; Babeva, T. Amphiphilic Poly(vinyl Alcohol) Copolymers Designed for Optical Sensor Applications—Synthesis and Properties. Coatings 2020, 10, 460. [Google Scholar] [CrossRef]
- Lazarova, K.; Vasileva, M.; Marinov, G.; Babeva, T. Optical characterization of sol-gel derived Nb2O5 thin films. Opt. Laser Technol. 2014, 58, 114–118. [Google Scholar] [CrossRef]
- Lazarova, K.; Awala, H.; Thomas, S.; Vasileva, M.; Mintova, S.; Babeva, T. Vapor Responsive One-Dimensional Photonic Crystals from Zeolite Nanoparticles and Metal Oxide Films for Optical Sensing. Sensors 2014, 14, 12207–12218. [Google Scholar] [CrossRef]
- Su, Y.; Li, C.; Li, M.; Li, H.; Xu, S.; Qian, L.; Yang, B. Surface acoustic wave humidity sensor based on three-dimensional architecture graphene/PVA/SiO2 and its application for respiration monitoring. Sens. Actuators B Chem. 2020, 308, 127693. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable/ Number of Bending Deformations | Before Bending | 25 | 100 | 200 | 1000 | |
|---|---|---|---|---|---|---|
| H (%) | 8.9 | 9.1 | 9.4 | 10.5 | 9.5 | |
| ΔT for 95% RH | 5.4 | 7.3 | 7.1 | 7.3 | 7.4 | |
| ΔRH | Range 5–75% RH | 3.3 | 5 | 2.5 | 2.5 | 2.5 |
| Range 75–95% RH | 0.6 | 0.6 | 0.4 | 0.5 | 0.4 | |
| S | Range 5–75% RH | 0.03 | 0.02 | 0.04 | 0.04 | 0.04 |
| Range 75–95% RH | 0.17 | 0.18 | 0.23 | 0.22 | 0.24 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lazarova, K.; Bozhilova, S.; Ivanova, S.; Christova, D.; Babeva, T. Flexible and Transparent Polymer-Based Optical Humidity Sensor. Sensors 2021, 21, 3674. https://doi.org/10.3390/s21113674
Lazarova K, Bozhilova S, Ivanova S, Christova D, Babeva T. Flexible and Transparent Polymer-Based Optical Humidity Sensor. Sensors. 2021; 21(11):3674. https://doi.org/10.3390/s21113674
Chicago/Turabian StyleLazarova, Katerina, Silvia Bozhilova, Sijka Ivanova, Darinka Christova, and Tsvetanka Babeva. 2021. "Flexible and Transparent Polymer-Based Optical Humidity Sensor" Sensors 21, no. 11: 3674. https://doi.org/10.3390/s21113674
APA StyleLazarova, K., Bozhilova, S., Ivanova, S., Christova, D., & Babeva, T. (2021). Flexible and Transparent Polymer-Based Optical Humidity Sensor. Sensors, 21(11), 3674. https://doi.org/10.3390/s21113674