
Frequency Spectra Analysis of Drawbar Pulls Generated by Special Driving Wheels Improving Tractive Performance


 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
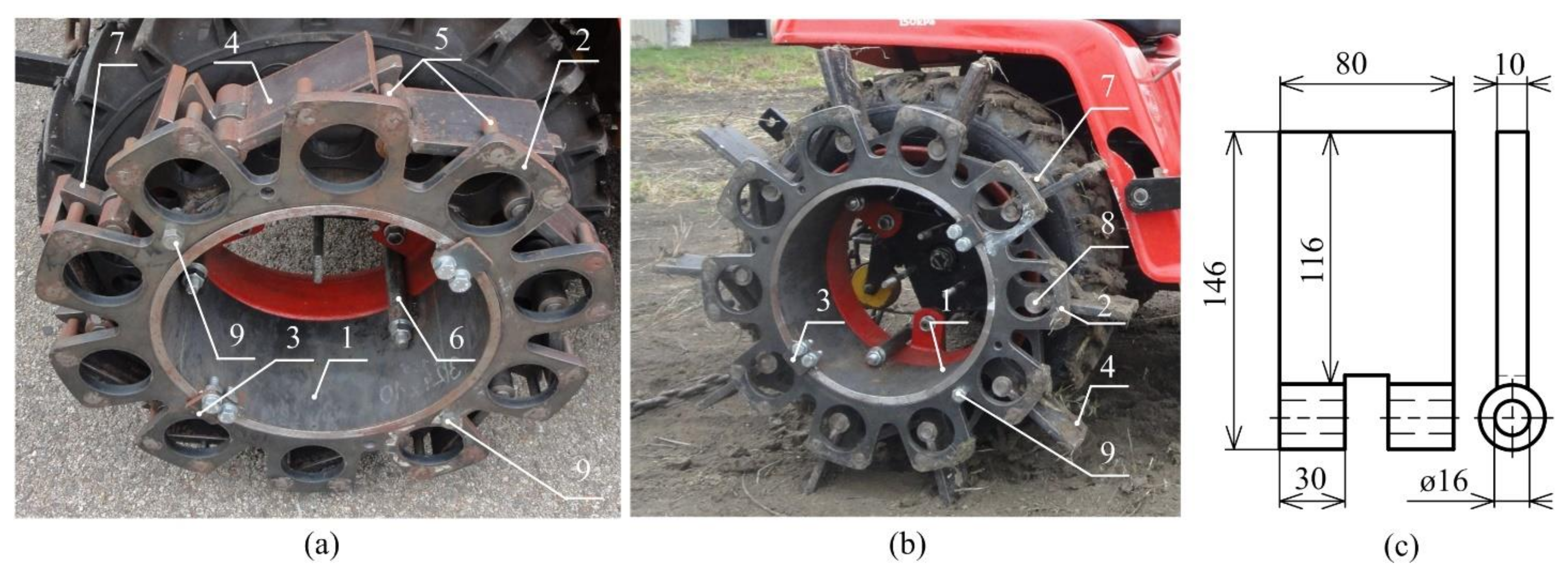
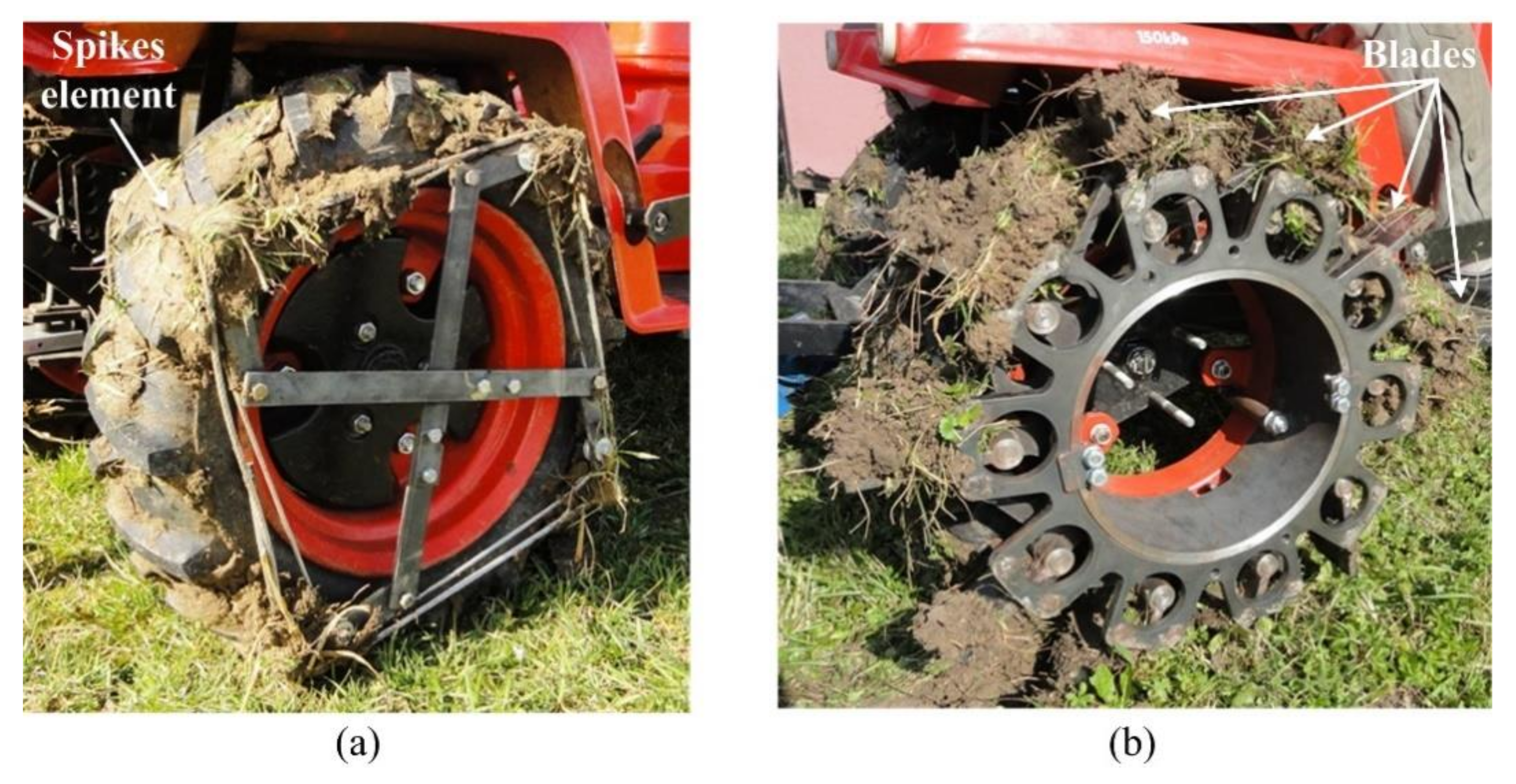
2.1. Design of Driving Wheels
2.2. Drawbar Pull Measurement System
- The test tractor MT8-070 Mini (Agrozet, a. s., Prostějov, Czech Republic) with a gasoline engine with the volume capacity of 400 cm3, rated engine power of 8 kW, and rated engine speed of 3600 min−1 pulling the load tractor to generate the drawbar pull. Three types of driving wheels (the standard tires, the blade wheels, and the spike tires) were mounted to the test tractor. The curb weight of the test tractor was 310 kg. The driver weight was 90 kg. The weight distribution on axes of the test tractor was published by [27].
- The load tractor 4K-14 (Agrozet, a. s., Prostějov, Czech Republic) with a diesel engine with the volume capacity of 661.6 cm3, maximum output power of 13 kW loading the test tractor during the measurement of drawbar pull. The curb weight of the load tractor was 870 kg. The driver weight was 80 kg.
- The load cell EMS 150 (Emsyst, s. r. o., Trenčín, Slovak Republic) with a strain-gauge bridge in steel housing (with accuracy of 0.2% or ±20 N, rated capacity: 10 kN). Output signal (sensitivity of strain-gauge) was 2 mV/V. It means that the output signal in mV obtained at the nominal loading depends on the voltage supply of the strain-gauge in V. At the recommended supply 10 V and nominal loading 10 kN, the output signal was 20 mV. The uncertainty of the measurement was ±2 mV or ±20 N. The data logger HMG 3010 (Hydac GmbH, Sulzbach, Germany) is a high-performance portable measuring and data-logging device [28,29] with accuracy ≤0.1%. The sampling frequency was set to 1 kHz. Resolution was 12 bit. The sensitivity of the measurement range from 0 to 10 V was 10/4096, i.e., 2.4 mV/bit. The uncertainty of the measurement was ±2.4 mV. The total uncertainty of the measurement was ±4.4 mV or ±44 N.
- The power supply contains two accumulators (12 V) connected in series or parallel to supply the sensor and data logger with direct voltage (12 V or 24 V). The power supply was manufactured as a portable device.
- The measurement of drawbar pull was performed at the distance of 30 m. The time of one passage from the start to the end was measured by a stopwatch to determine the test tractor velocity, as shown in Figure 4. The tractor with each driving wheel type did not move in the driving tracts after previous measurements. The tests have never been repeated on the previous tracks. The grass plot was large enough to move the tractor into a new place for each measurement.
- A wheel gauge of the test and load tractor was 0.65 m and 0.85 m. Considering the increase in the wheel gauge of the test tractor with the blade wheel and tire width of both tractors, the load tractor moved on the grass plot surface, but was yes, the change retains the meaning partially disrupted by the special driving wheels. To eliminate the influence of the grass plot surface conditions on the breaking forces, the four-wheel drive load tractor with an adequate weight was used. The weight of the load tractor was more than two times higher than the test tractor.
- Soil properties affect the force interaction between the ground and wheels. The drawbar pull of the tractor with different types of driving wheels was measured at the same soil type of the grass plot and at the same soil moisture to eliminate the change of measured values due to soil properties. The total weight of the tractor is the main parameter that affects the drawbar pull. When the standard and spike tires were used, the rims of driving wheels were ballasted with the correct additional weight to reach the same tractor weight as in the case of the blade wheels. The drawbar pull measurements were performed in accordance with [30]. The test tractor was in the second gear (gear ratio i2 = 146.3) and operated at the rated rotation speed of the engine (3600 min−1).
2.3. FFT Analysis of Drawbar Pull Signals
- X[m] = M-th value of the sequence from the frequency domain (the whole sequence is also referred to as the spectrum);
- x[n] = N-th sample of the time sequence;
- m = Order of the output sample;
- n = Order of the input sample;
- N = Total number of input samples.
- L = length(X);
- n = 2^nextpow2(L);
- Y = fft(X,n)/L;
- f = Fs/2*linspace(0,1,n/2+1);
- y = 2*abs(Y(1:NFFT/2+1));
- plot(f, y);
- XRMS = RMS value;
- x[n] = Nth sample of the time sequence;
- N = Total number of input samples.
2.4. Parameters Describing the Special Driving Wheel Properties
- L = Distance of grass plot (30 m), in m;
- T—Time, in s.
- v = Tractor speed, in m s−1;
- FD = Mean drawbar pull, in N.
- ne = Actual engine speed, in s−1;
- i2 = Gear ratio.
- 16 elements of tire tread pattern of standard tire (rubber lugs);
- 10 elements of blade wheel;
- 4 elements of spike tire.
- E = Number of elements of one driving wheel;
- nw = Rotation speed of driving wheels, in s−1.
2.5. Experimental Conditions
3. Results and Discussion
3.1. Properties and Application of Special Driving Wheels
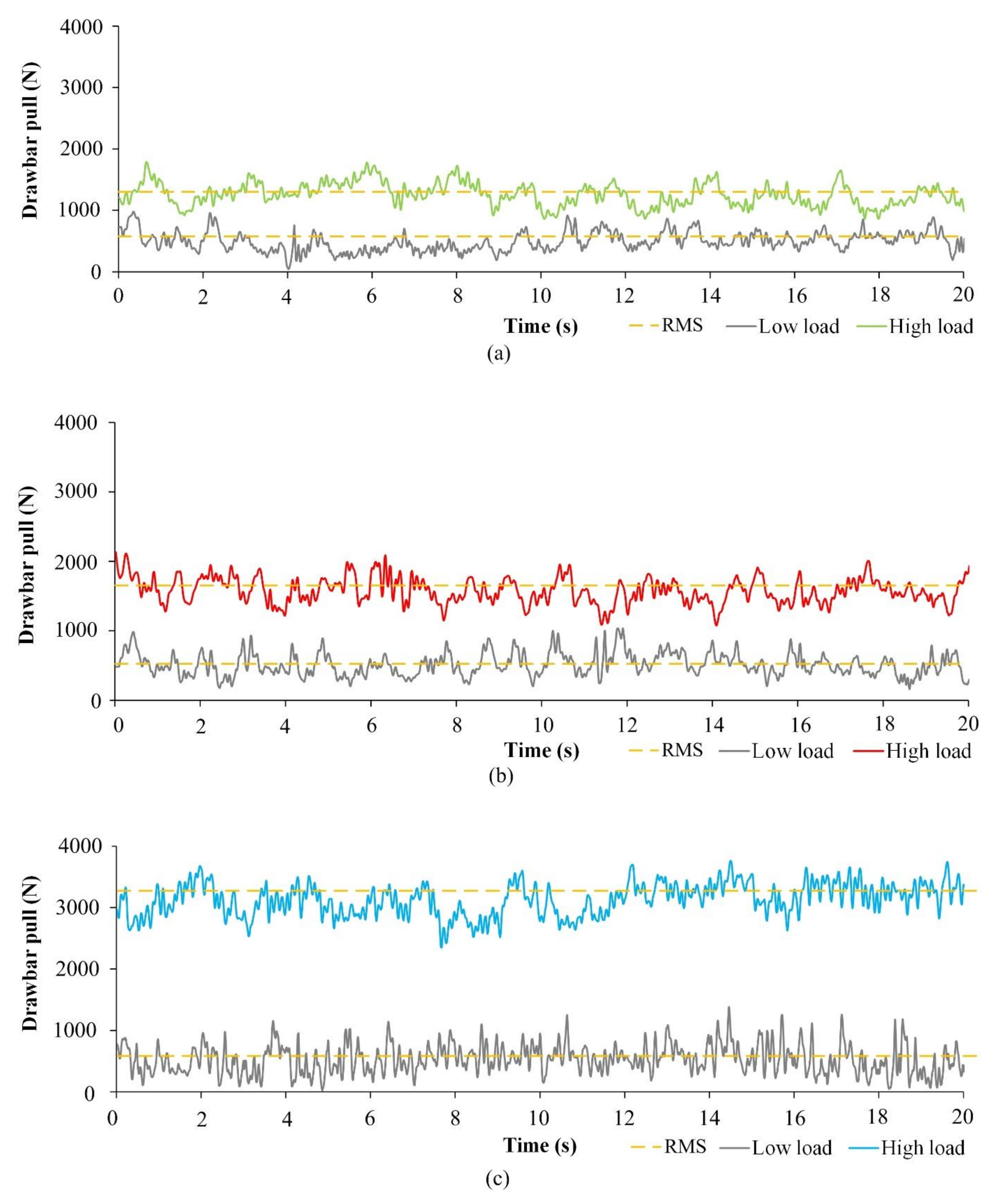
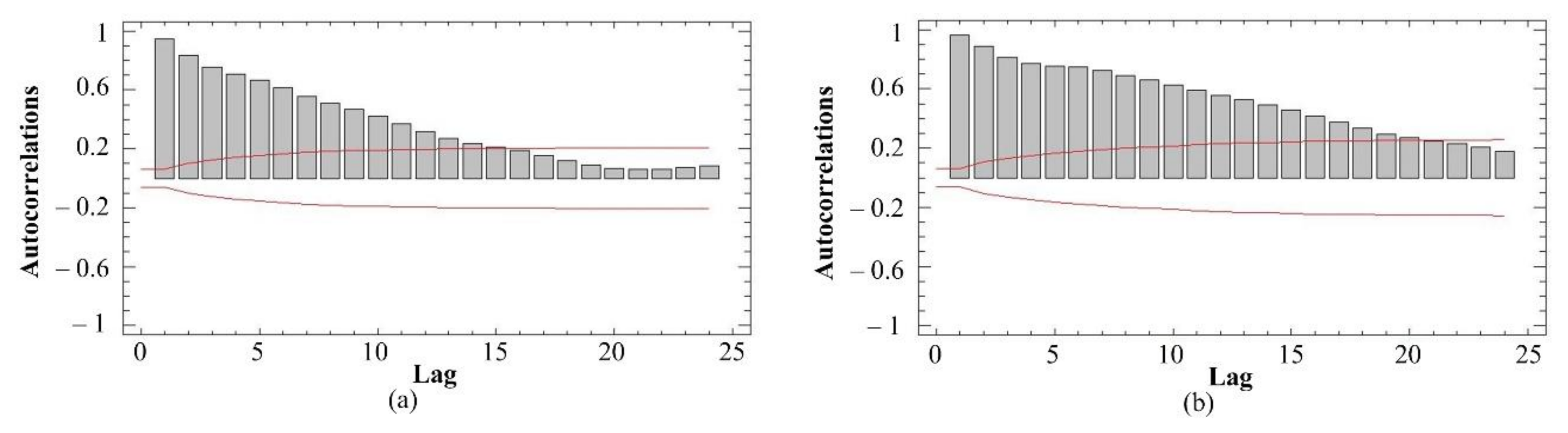
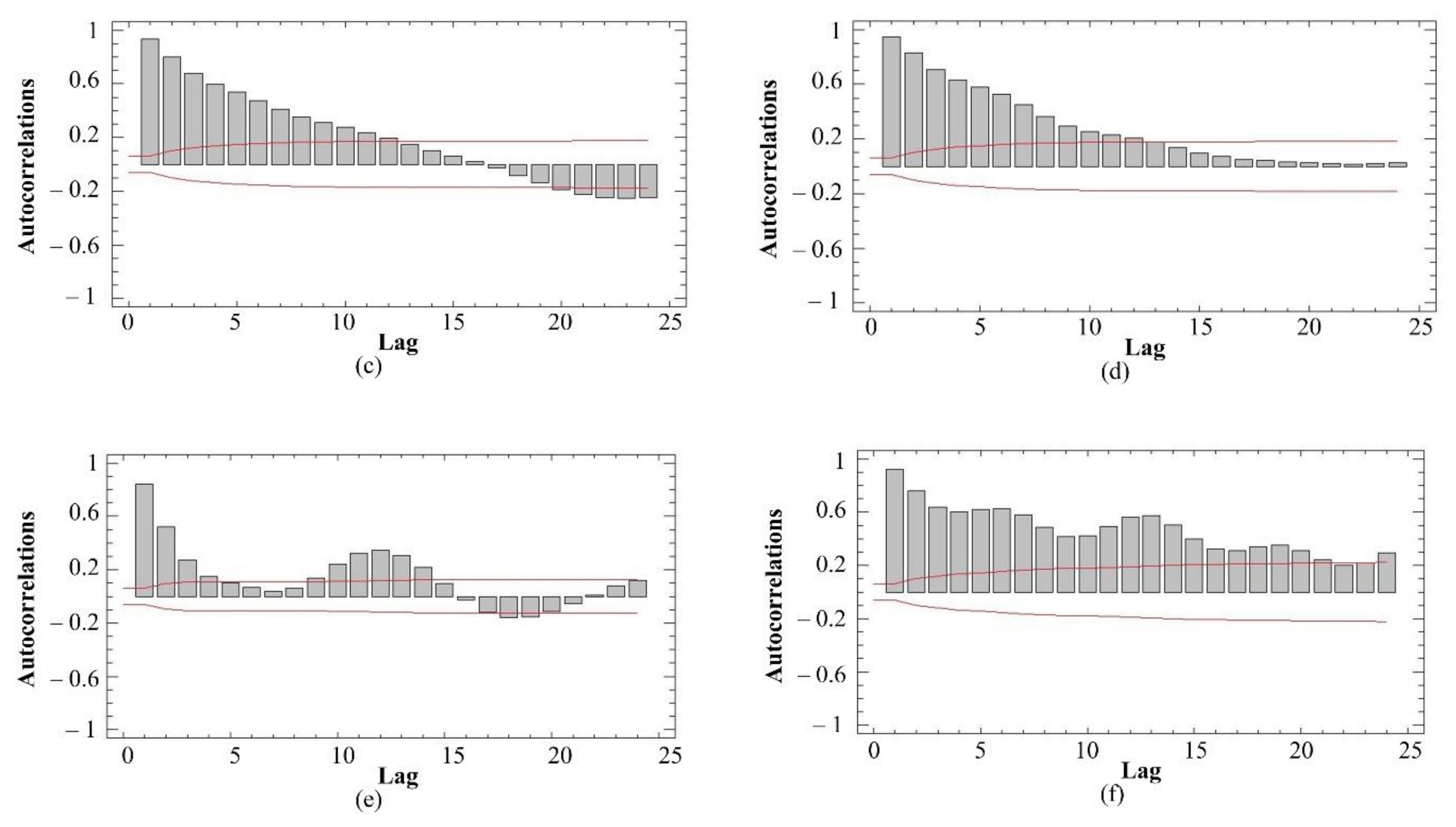
3.2. Evaluation of Drawbar Pull Frequency Spectra
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nguyen, C.D.; Prosvirin, A.; Kim, J.M. A reliable fault diagnosis method for a gearbox system with varying rotational speeds. Sensors 2020, 20, 3105. [Google Scholar] [CrossRef] [PubMed]
- Kang, R.; Meng, F.; Chen, X.; Yu, Z.; Fan, X.; Ming, A.; Huang, Q. Structural design and crawling pattern generator of a planar quadruped robot for high-payload locomotion. Sensors 2020, 20, 6543. [Google Scholar] [CrossRef] [PubMed]
- Zhu, B.; Han, J.; Zhao, J. Tire-pressure identification using intelligent tire with three-axis accelerometer. Sensors 2019, 19, 2560. [Google Scholar] [CrossRef] [PubMed]
- Liang, R.; Liu, W.; Ma, M.; Liu, W. An efficient model for predicting the train-induced ground-borne vibration and uncertainty quantification based on Bayesian neural network. J. Sound Vib. 2021, 495, 115908. [Google Scholar] [CrossRef]
- Makharoblidze, R.M.; Lagvilava, I.M.; Basilashvili, B.B.; Makharoblidze, Z.K. Interact of the tractor driving wheels with the soil by considering the rheological properties of soils. Ann. Agrar. Sci. 2018, 16, 1512–1887. [Google Scholar] [CrossRef]
- Watyotha, C.; Salokhe, V.M. Pull, lift and side force characteristics of cage wheels with opposing circumferential lugs. Soil Tillage Res. 2001, 60, 123–134. [Google Scholar] [CrossRef]
- Watyotha, C.; Gee-Clough, D.; Salokhe, V.M. Effect of circumferential angle, lug spacing and slip on lug wheel forces. J. Terramech. 2001, 38, 1–14. [Google Scholar] [CrossRef]
- Soekarno, S.; Salohke, V. Soil reactions on the cage wheels with staggered echelons of half-width lugs and perfect chevron lugs in wet clay soil. Agric. Eng. Int. CIGR J. 2003, 2003, 1–25. Available online: https://cigrjournal.org/index.php/Ejounral/article/view/400/394 (accessed on 20 April 2021).
- Moreno, J.; Clotet, E.; Tresanchez, M.; Martínez, D.; Casanovas, J.; Palacín, J. Measurement of vibrations in two tower-typed assistant personal robot implementations with and without a passive suspension system. Sensors 2017, 17, 1122. [Google Scholar] [CrossRef]
- Palacín, J.; Martínez, D.; Rubies, E.; Clotet, E. Suboptimal omnidirectional wheel design and implementation. Sensors 2021, 21, 865. [Google Scholar] [CrossRef]
- Zhao, J.; Su, J.; Zhu, B.; Shan, J. An indirect TPMS algorithm based on tire resonance frequency estimated by AR model. SAE Int. J. Passeng. Cars Mech. Syst. 2016, 9, 99–106. [Google Scholar] [CrossRef]
- Schreiber, M.; Kutzbach, H.D. Influence of soil and tire parameters on traction. Res. Agric. Eng. 2008, 54, 43–49. [Google Scholar] [CrossRef]
- Ding, L.; Gao, H.; Deng, Z.; Nagatani, K.; Yoshida, K. Experimental study and analysis on driving wheels’ performance for planetary exploration rovers moving in deformable soil. J. Terramech. 2011, 48, 27–45. [Google Scholar] [CrossRef]
- Molari, G.; Bellentani, L.; Guarnieri, A.; Walker, M.; Sedoni, E. Performance of an agricultural tractor fitted with rubber tracks. Biosyst. Eng. 2012, 111, 57–63. [Google Scholar] [CrossRef]
- Ge, J.; Wang, X.; Kito, K. Comparing tractive performance of steel and rubber single grouser shoe under different soil moisture contents. Int. J. Agric. Biol. Eng. 2016, 9, 11–20. [Google Scholar]
- Marsili, A.; Servadio, P.; Pagliai, M.; Vignozzi, N. Changes of some physical properties of a clay soil following passage of rubber- and metal-tracked tractors. Soil Tillage Res. 1998, 49, 185–199. [Google Scholar] [CrossRef]
- Ansorge, D.; Godwin, R.J. The effect of tyres and a rubber track at high axle loads on soil compaction, Part 1: Single axle-studies. Biosyst. Eng. 2007, 98, 115–126. [Google Scholar] [CrossRef]
- Du, Y.; Gao, J.; Jiang, L.; Zhang, Y. Numerical analysis of lug effects on tractive performance of off-road wheel by DEM. J. Braz. Soc. Mech. Sci. Eng. 2017, 39, 1977–1987. [Google Scholar] [CrossRef]
- Liu, J.; Chen, P.; Tang, S.; Gao, H. Theoretical and experimental research on lugged wheel performance for wheel mobile robot on loose sand. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; pp. 614–619. [Google Scholar]
- Raheman, H.; Snigdharani, E. Development of a variable-diameter cage wheel for walking tractor and its performance evaluation in soil bin (simulating wetland). J. Inst. Eng. India Ser. A 2020, 101, 41–48. [Google Scholar] [CrossRef]
- Nguyen, C.D.; Prosvirin, A.E.; Kim, C.H.H.; Kim, J.M. Construction of a sensitive and speed invariant gearbox fault diagnosis model using an incorporated utilizing adaptive noise control and a stacked sparse autoencoder-based deep neural network. 2021. Sensors 2021, 21, 18. [Google Scholar]
- Wieckowski, J.; Rafajłowicz, W.; Moczko, P.; Rafajłowicz, E. Data from vibration measurement in a bucket wheel excavator operator’s cabin with the aim of vibrations damping. Data Brief 2021, 35, 106836. [Google Scholar] [CrossRef] [PubMed]
- Sudhakar, I.; AdiNarayana, S.; AnilPrakash, M. Condition monitoring of a 3-Ø induction motor by vibration spectrum analysis using FFT analyser—A case study. Mater. Today Proc. 2017, 4, 1099–1105. [Google Scholar] [CrossRef]
- Abrahám, R.; Majdan, R.; Mojžiš, M. Design and verification of tractor wheels equipped with automatically extensible blades. Acta Technol. Agric. 2013, 16, 49–52. [Google Scholar] [CrossRef]
- Majdan, R.; Abrahám, R.; Tkáč, Z.; Mojžiš, M. Drawbar parameters of tractor with prototypes of driving wheels and standard tyres. Acta Technol. Agric. 2018, 21, 63–68. [Google Scholar] [CrossRef]
- Abrahám, R.; Majdan, R.; Drlička, R. Special tractor driving wheels with two modification of spikes inclination angle. Agron. Res. 2019, 17, 333–342. [Google Scholar]
- Majdan, R.; Abrahám, R.; Tkáč, Z.; Drlička, R.; Matejková, E.; Kollárová, K.; Mareček, J. Static lateral stability of tractor with rear wheel ballast weights: Comparison of ISO 16231-2 (2015) with experimental data regarding tyre deformation. Appl. Sci. 2021, 11, 381. [Google Scholar] [CrossRef]
- Kosiba, J.; Tkáč, Z.; Hujo, Ľ.; Bureš, Ľ. Operating modes of hydraulic circuit of tractor Zetor Forterra 114 41. Acta Technol. Agric. 2011, 14, 46–49. [Google Scholar]
- Hujo, Ľ.; Jablonický, J.; Markovič, J.; Tulík, J.; Simikić, M.; Zastempowski, M.; Janoušková, R. Design of laboratory test equipment for automotive oil filters to evaluate the technical life of engine oil. Appl. Sci. 2021, 11, 483. [Google Scholar]
- STN ISO 789-9: 1993. Power Test for Drawbar; Slovak Office of Standards, Metrology and Testing: Bratislava, Slovakia, 1993. [Google Scholar]
- Lyons, R.G. Understanding Digital Signal Processing; Prentice Hall: Upper Saddle River, NJ, USA, 2001; ISBN 9780201634679. [Google Scholar]
- Semetko, J.; Janoško, I.; Pernis, P. Determination of driving force of tractor and trailer wheels. Acta Technol. Agric. 2002, 5, 1–4. [Google Scholar]
- Semetko, J.; Janoško, I.; Pernis, P. Determination of power of multidrive vehicles. Acta Technol. Agric. 2004, 7, 20–23. [Google Scholar]
- Wang, X.; Ito, N. Study on traction performance of powered wheel of agricultural vehicles—Effect of lug size in driven wheel. J. Terramech. 1987, 24, 116. [Google Scholar] [CrossRef]
- Gasparetto, E.; Febo, P.; Pessina, D.; Rizzato, E. The rolling resistance of narrow steel wheels in Italian paddy fields. J. Agric. Eng. Res. 1992, 52, 91–100. [Google Scholar] [CrossRef]
- Yang, Y.; Yi, S.; Shugen, M. Drawbar pull of a wheel with an actively actuated lug on sandy terrain. J. Terramech. 2014, 56, 17–24. [Google Scholar] [CrossRef]
- Battiato, A.; Diseren, E. Influence of tyre inflation pressure and wheel load on the traction performance of a 65 kW MFWD tractor on a cohesive soil. J. Agric. Sci. 2013, 5, 197–215. [Google Scholar] [CrossRef]
- Helexa, M. Monitoring the impact of tyre inflation pressure on tensile properties of forest tractor. Res. Agric. Eng. 2014, 60, 127–133. [Google Scholar] [CrossRef]
- Kučera, M.; Helexa, M.; Molenda, M. Selected tire characteristics and their relation to its radial stiffness. MM Sci. J. 2016, 9, 1524–1530. [Google Scholar] [CrossRef]
- Malý, V.; Kučera, M. Determination of mechanical properties of soil under laboratory conditions. Res. Agric. Eng. 2014, 60, 66–69. [Google Scholar] [CrossRef]
- Malý, V.; Tóth, F.; Mareček, J.; Krčálová, E. Laboratory test of the soil compaction. Acta Univ. Agric. Silvic. Mendel. Brun. 2015, 63, 77–85. [Google Scholar] [CrossRef]
- Hermawan, W.; Yamazaki, M.; Oida, A. Experimental analysis of soil reaction on a lug of a movable lug wheel. J. Terramech. 1998, 35, 119–135. [Google Scholar] [CrossRef]
- Salokhe, V.M.; Manzoor, S.; Gee-Clough, D. The measurement of forces on a cage wheel lug when operating in wet clay soil. Soil Tillage Res. 1989, 14, 327–340. [Google Scholar] [CrossRef]
- Ding, L.; Gao, H.; Deng, Z.; Liu, R.; Gao, P. Theoretical analysis and experimental research on wheel lug effect of lunar rover. J. Astronaut. 2009, 30, 1351–1358. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| gravel | % | 15.3 |
| sand | % | 45.2 |
| silt | % | 35.4 |
| clay | % | 4.1 |
| organic matter | % | 6.62 |
| particle density | g m−3 | 2.6 |
| moisture content (dry basis) | % | 27.7 |
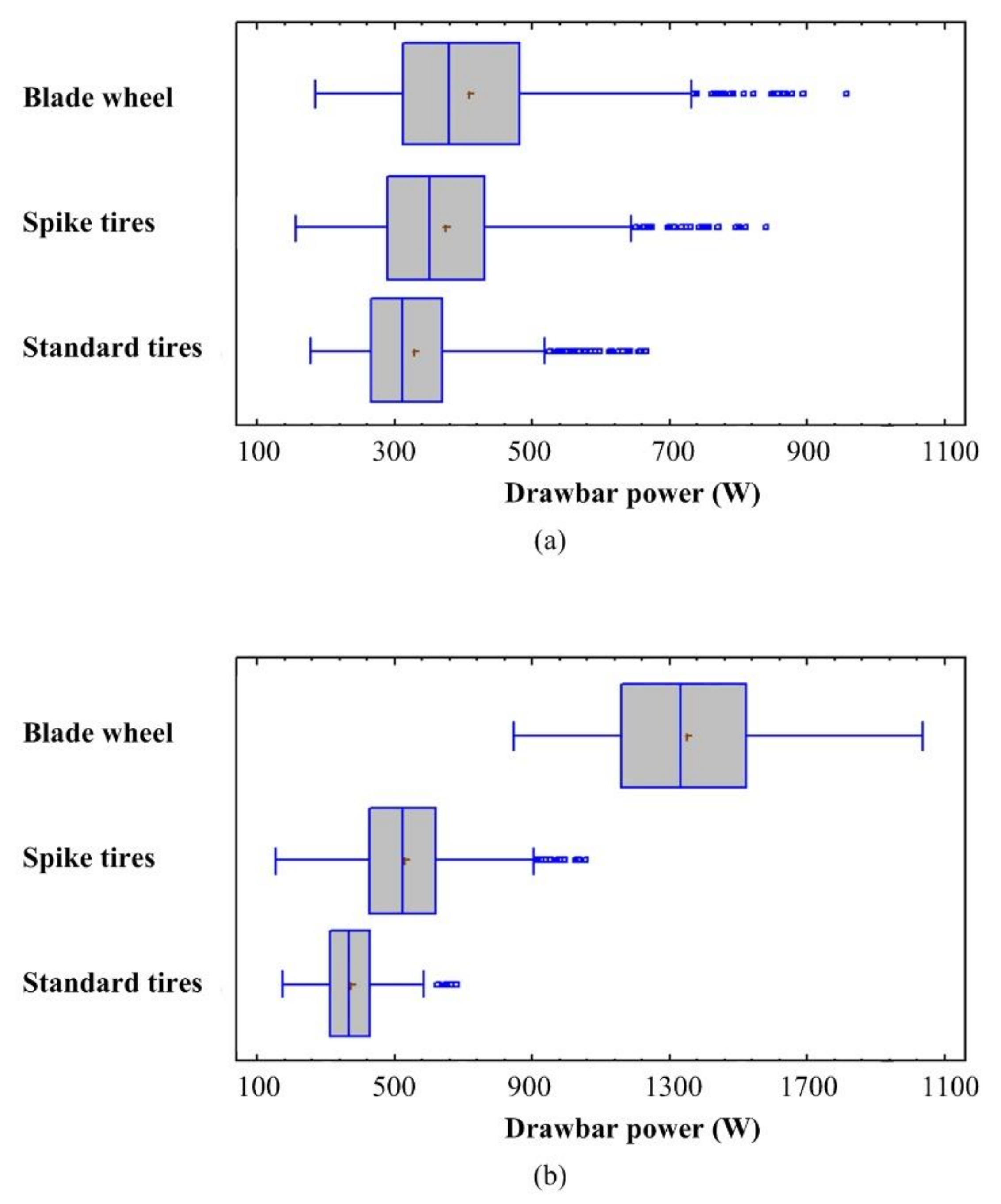
| Wheel Type | Load Level | RMS Drawbar Pull, in N |
|---|---|---|
| standard tires | low | 518.056 |
| high | 1274.652 | |
| spike tires | low | 539.295 |
| high | 1589.953 | |
| blade wheels | low | 580.914 |
| high | 3141.954 |
| Wheel Type | Load Level | Tractor Speed, in m s−1 | Mean Drawbar Pull, in N | Standard Deviation, in N | Variation Coefficient, in % | Drawbar Power, in W |
|---|---|---|---|---|---|---|
| standard tires | low | 0.667 | 493.9 | 155.3 | 31.5 | 329.5 |
| high | 0.306 | 1260.4 | 185.4 | 14.7 | 385.7 | |
| spike tires | low | 0.731 | 513.4 | 164.1 | 31.9 | 375.4 |
| high | 0.326 | 1578.3 | 184.9 | 11.7 | 514.5 | |
| blade wheels | low | 0.751 | 530.5 | 236.1 | 49.6 | 398.4 |
| high | 0.434 | 3129.4 | 261.4 | 8.4 | 1358.2 |
| Wheel Type | Load | Rotation Speed of Driving Wheels, in s−1 | Model Frequency Interval | Experimental Frequency, in Hz | |
|---|---|---|---|---|---|
| Minimum Frequency, in Hz | Maximum Frequency, in Hz | ||||
| standard tires | low | 0.41 | 6.56 | 13.12 | - |
| high | - | ||||
| spike tires | low | 1.64 | 3.28 | 3.27 | |
| high | 3.13 | ||||
| blade wheels | low | 4.09 | 8.18 | 4.11 | |
| high | 3.91 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abrahám, R.; Majdan, R.; Kollárová, K.; Tkáč, Z.; Olejár, M.; Matejková, E.; Kubík, Ľ. Frequency Spectra Analysis of Drawbar Pulls Generated by Special Driving Wheels Improving Tractive Performance. Sensors 2021, 21, 2903. https://doi.org/10.3390/s21092903
Abrahám R, Majdan R, Kollárová K, Tkáč Z, Olejár M, Matejková E, Kubík Ľ. Frequency Spectra Analysis of Drawbar Pulls Generated by Special Driving Wheels Improving Tractive Performance. Sensors. 2021; 21(9):2903. https://doi.org/10.3390/s21092903
Chicago/Turabian StyleAbrahám, Rudolf, Radoslav Majdan, Katarína Kollárová, Zdenko Tkáč, Martin Olejár, Eva Matejková, and Ľubomír Kubík. 2021. "Frequency Spectra Analysis of Drawbar Pulls Generated by Special Driving Wheels Improving Tractive Performance" Sensors 21, no. 9: 2903. https://doi.org/10.3390/s21092903
APA StyleAbrahám, R., Majdan, R., Kollárová, K., Tkáč, Z., Olejár, M., Matejková, E., & Kubík, Ľ. (2021). Frequency Spectra Analysis of Drawbar Pulls Generated by Special Driving Wheels Improving Tractive Performance. Sensors, 21(9), 2903. https://doi.org/10.3390/s21092903