1. Introduction
The ongoing SARS-CoV-2 (COVID-19) pandemic is repeatedly pushing our communities to reduce social contacts and minimize daily mobility. As a consequence, the paralysis of mobility is dramatically affecting the economy of most of the countries worldwide [
1]. In this context, social distancing is of paramount importance to limit the spreading of the infections, and, despite being a challenging task [
2], a diffused capability to monitor it could orient strategical decisions. Social distancing refers to the non-pharmaceutical approaches that aim at limiting the frequency and closeness of physical contacts between people [
3]. To this end, technical committees at national-scale have established rules to ensure distancing amongst people such as travel restrictions, border control, closure of public places, and warning their citizens to keep a
m to
m distance from each other when they have to go outside [
4,
5]. When social distancing cannot be guaranteed,
contact tracing must be ensured to keep track of new possible infections. A huge effort has been invested in the development of application-specific mobile apps, thus targeting mobile devices and their localization data for limiting the spreading of the infection [
6,
7,
8] and supporting an effective digital epidemiological surveillance [
9]. In parallel, a set of open ethical issues and challenges have been raised regarding privacy-preservation, scheduling, and incentive mechanisms for the massive implementation of such solutions [
10,
11]. A comprehensive survey about contact tracing in the COVID-19 pandemic is provided in [
6].
In such a scenario, distance estimation technologies can facilitate social distancing and support contact tracing solutions, becoming a key enabler for effective mitigation of the spreading of the infection. Therefore, several technologies have been proposed in the last months not only to assess inter-personal distances but also to cover different aspects of interest such as real-time monitoring for crowd detection and avoiding [
3,
12,
13]. In particular, several radio-frequency wireless technologies [
3] and emerging methods exploiting Aritifical Intelligence (AI) and Machine Learning (ML) [
12] have been analyzed in recent surveys for distance estimation and social distancing.
Technologies such as Bluetooth [
14,
15,
16], Ultra-Wide Band (UWB) [
17], ZigBee [
18], and Radio-frequency identification (RFID) [
19] have attracted the attention of the research community for their capability of providing ranging measurements between users in dynamic contexts. These ranging technologies are based on Received Signal Strength Indicator (RSSI) or time-based measurements (e.g., time-of-arrival, time-difference-of-arrival, round-trip time) [
3]. This means that the feature extracted from the signal, whether it is based on RSSI or time-based, is a reliable measure of the distance only when the signal experiences a direct propagation path (i.e., without relevant obstacles and multipath). As a result, proximity awareness and inter-personal distance estimation can be achieved, but bodies and obstacles can significantly decrease the ranging accuracy. Hence, an accurate distance estimation requires Line of Sight (LOS) visibility among ranging users or a complex propagation model estimation [
20]. They also have a limited ranging capability, spanning from short (Bluetooth, RFID) to medium ranges (UWB, ZigBee) [
3], a coverage that is not suitable for continuous monitoring of the distance over larger areas.
A different approach for distance estimation relies instead on positioning technologies. An estimate of inter-personal distance can be easily inferred from users’ positions. For instance, users that are able to locate themselves can compute their distance from another user whose coordinates are known. Through this approach, the LOS constraint can be overcome, providing also long-range distance estimation, but privacy concerns may arise due to the explicit position disclosure between users. Technologies such as Wi-Fi [
21,
22,
23], Cellular networks [
24], UWB [
25], and Global Navigation Satellite System (GNSS) [
26] have been used for positioning and can be therefore exploited to this end. Differently from solutions based on Wi-Fi or cellular networks, GNSS is mostly limited to outdoor applications. Nevertheless, 6.7 billion smartphones are estimated by 2023 [
27] and GNSS is extremely popular on these devices [
28]. With its worldwide coverage, it is certainly the most widespread positioning technology, with more than 6 billion estimated receivers in 2020 [
28]. It can be therefore a convenient choice to provide a ubiquitous outdoor distance estimation technology that does not need application-specific hardware. On the other hand, technologies such as UWB, ZigBee, and RFID demand an increased cost to be embedded and additional computational power to perform ranging.
In particular, GNSS has been investigated by researchers to explore cooperative distance estimation [
29]. In this framework, the distance between users can be computed indirectly, by leveraging GNSS raw data and a communication channel between cooperating users (namely the
agents). GNSS-based ranging methods can hence be considered for distance estimation in outdoor environments and in the presence of networked agents. They are based on a ubiquitous technology, which is both (i) readily available in billions of devices and (ii) widespread thanks to a worldwide coverage. Moreover, (iii) it enables short to long-range distance estimation, working also when (iv) LOS between agents cannot be guaranteed (which is even more likely for long-range distances).
Being a promising ranging technology, an assessment of GNSS-based distance estimation was presented in [
26] for vehicular applications and, recently, a proof-of-concept demonstrated the feasibility of smartphone-based collaborative positioning based on GNSS inter-agent distances [
30].
This study addresses the modeling and experimental assessment of a GNSS-based ranging technique, namely Inter-Agent Ranging (IAR), preliminarily proposed in [
31], based on the exchange of a single row of the Direction Cosine Matrix (DCM) (i.e., steering vectors) and the corresponding pseudorange measurement between asynchronous users. Compared to traditional GNSS-based ranging approaches, the IAR technique requires only a single satellite in a common view to building up a collaborative distance measurement among connected devices. In this work, we provide an analytical model for mean and variance estimation of the proposed ranging method. The model is then validated through Monte Carlo simulations and on-field experimental tests. The results presented in this study compare the proposed approach to state-of-the-art GNSS-based ranging methods known in geodesy. All the considered methods share (i–iv) features and they are a straightforward term of comparison. Similarly, long-range urban scenarios are considered as a representative use case to leverage (iii) and (iv). We demonstrate that the proposed method overcomes the performance attainable by a plain absolute position difference while preventing full disclosure of the user position. The IAR technique is found to also be a valid alternative to state-of-the-art GNSS-based ranging approaches that deliver comparable performances while demanding enhanced visibility of common satellites.
Paper Outline
The rest of the paper is organized as follows: in
Section 2, GNSS essentials and the necessary nomenclature and definitions are recalled to support the proposed technique. State-of-the-art GNSS-based ranging methods are summarized and their limitations are described w.r.t. the proposed rationale. GNSS observables are applied to IAR computation in
Section 2 as well. In
Section 3, the estimation of the IAR is introduced along with the full derivation of a theoretical model to describe its statistical behavior according to the geometry of a dual-agent scenario. In
Section 4, a static, controlled environment and real static and kinematic scenarios are investigated by using Commercial Off The Shelves (COTS) GNSS receivers. The theoretical model is validated through synthetically simulated and real experimental data. A comparison of the experimental accuracy w.r.t. the traditional GNSS-based techniques is contextually provided and conclusions are eventually drawn in
Section 5.
2. Background
In principle, GNSS-based distance estimation can be pursued between embedded ultra-low-cost GNSS receivers which are nowadays integrated into vehicles, mobile devices such as smartphones and tablets, and wearables such as smartwatches. Furthermore, most of the current Location Based Services (LBS)s require data connectivity through which also collaborative approaches can be enabled.
As demonstrated in [
30], indeed, the concept of collaborative ranging applied to such a class of devices leverages the exchange of low-level navigation data through current networks (4G/LTE). These applications will be further supported by the next-generations of mobile networks (i.e., 5G-NR Ultra-reliable Low Latency Communication (URLLC) [
32,
33]). Thanks to the absence of LOS requirements, such a paradigm can also be conceived as a complementary method to more challenging Radio-Frequency (RF) approaches for which obstacles and interference degrade estimation performance, as recalled in
Section 1.
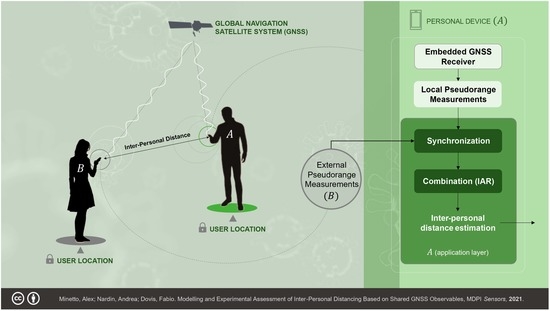
Figure 1 shows a pictorial representation of distance estimation performed by merging the main enablers of the proposed solution: GNSS and existent mobile network infrastructures.
2.1. GNSS Observables and Positioning
The positioning problem in GNSS mainly concerns the determination of a set of coordinates typically referred to as
receiver space state. The location of a GNSS receiver can be expressed in Cartesian quantities within a given geographic coordinates system (e.g., Earth Centered Earth Fixed (ECEF), Latitude, Longitude, Altitude (LLA)), depending on the target application. The receiver clock offset w.r.t. the in-orbit clocks, namely
user clock bias, can be contextually estimated, thus providing a common timescale to all the GNSS devices. The overall set of time and three-dimensional coordinates
defines the
state of a generic GNSS receiver, namely, the unknowns of the positioning problem at a generic instant
. In (
1),
is the clock bias term obtained by multiplying the aforementioned
user clock bias by the speed of light. To estimate (
1), a set of satellite-to-user range estimates are collected at each time instant to solve for a multilateration problem [
34]. These satellite-to-receiver ranges are retrieved by the receiver through the estimation of the time-of-flight of the navigation signals received from each visible satellite
at a given time instant
. The set of collected measurements is
The generic
is referred to as
pseudorange because of the clock bias component. GNSS pseudorange measurements are altered by a set of impairments affecting the propagation of the navigation signals (e.g., Ionospheric error, Tropospheric error, ephemeris error, relativistic error, etc.). The biases induced by such effects can be modeled and subtracted to the estimated measurements [
34]. In this view, a
raw pseudorange measurement can be defined as
where
is the
satellite-to-user range. The random variable
collects all the error contributions affecting the measurement, while the clock bias term,
, is common to all the measurements in (
2). Once the bias corrections are applied to
, a
corrected pseudorange measurement can be defined as
The error term,
, is the User Equivalent Range Error (UERE) which models the independent residual error term not compensated by the aforementioned corrections [
35]. It can be assumed to be a zero-mean Gaussian-distributed random variable with a given standard deviation
. Provided a set of corrected pseudorange measurements and satellites’ ephemeris data, an estimate of (
1) can be indirectly obtained through an iterative Least Mean Square (LMS) solution
Indeed, both receiver state and measurement vectors are expressed in incremental notation w.r.t. an approximation point needed for the linearization of the multilateration problem [
34]. Consequently,
in (
6) is the
column vector obtained as the difference between the measurements and nominal range distances computed between the satellite position and the linearization point. In (
6),
is a
Jacobian matrix referred to as
observation matrix or DCM and defined as
The axial components in (
7) are defined as
where
are the coordinates of the linearization point. The terms in (
8) will be referred hereafter to as the
unitary steering vector , which is directed towards the
i-th satellite.
In this work, the bias term
is assumed to be estimated through (
6) and compensated for in (
5). This allows for modelling the satellite-to-user
estimated range as a zero-mean Gaussian random variable
where
is the standard deviation of the UERE. For the sake of completeness, it is worth remarking that advanced estimation algorithms can be applied to the receiver state estimation, such as Bayesian algorithms (e.g., Extended Kalman Filter (EKF)). Along with these solutions, several integration schemes are typically implemented to fuse auxiliary sensors data (e.g., Inertial Navigation System (INS)) to GNSS in precise positioning applications. However, these aspects do not limit the applicability of the proposed models, and the investigation of these solutions falls out of the scope of this work.
2.2. Distance Estimation via GNSS Data
Given the true locations of two independent GNSS receivers, referred to as agent
A and agent
B, their true
baseline length can be expressed as
which is, by definition, the Euclidean norm of the
displacement vector between the agents [
26]. To estimate such a distance using personal GNSS-enabled devices, different approaches can be pursued involving the exchange of different classes of data:
absolute positioning solutions, as the output of the multilateration algorithm described in
Section 2.1;
raw GNSS measurements and unitary steering vectors obtained through the computation of (
7) w.r.t. the current estimated position (instead of the linearization point).
The two approaches lead to the definition of two categories of distance estimation methods, respectively the
Absolute Position Difference and
Differential GNSS distancing, which are described in
Section 2.2.1 and
Section 2.2.2, respectively.
2.2.1. Absolute Position Difference
The practical calculation of (
10), named Absolute Position Difference (APD), needs to consider the fact that the positions
and
are results of the estimation process discussed in
Section 2.1. Hence, the uncertainty on the estimated positions affects in turn the estimated distance according to
where the generic
is the estimated solution and
is an error due to the independent positioning errors of the involved receivers. APD is a
naive approach which can be pursued by exchanging users’ location estimates. In this case, pseudonymization or advanced encryption of the shared data must be implemented to ensure privacy [
36].
2.2.2. Differential GNSS Distancing
Previous works on the topic investigated a set of algorithms addressing the estimation of (
10) within a cooperative framework [
26,
37,
38]. These methods rely on the simultaneous availability of multiple satellites in LOS for both the receivers (as highlighted in
Figure 2), hereafter referred to as
shareable satellites. Differently from APD, they are based on the combination of GNSS observables computed independently by the two agents. In particular, each agent provides the associated unitary steering vectors and pseudorange measurements to ultimately estimate (
10).
The displacement vector between the two agents is thus treated as the unknown of the problem, as well as for the individual receiver states in
Section 2.1. According to this, raw pseudorange measurements (from shareable satellites) provided by the agent
B can be aggregated in the measurement vector of agent
A within the iterative positioning algorithm in charge of performing the inter-personal distance estimation. The observables can be then processed through various differential GNSS methods such as Pseudorange Ranging (PR), Single Differences (SD) or Double Differences (DD) [
26]. For code-based measurements in static conditions, it has been demonstrated that the raw-pseudorange based technique (PR) shows the best performance in terms of Root Mean Squared Error (RMSE) w.r.t. more complex methods (i.e., SD and DD ranging) [
26].
2.2.3. Applicability
Differently from the aforementioned methods, APD requires the explicit exchange of absolute positioning solutions, thus allowing for any collaborating receiver to be aware of the location of other users. On the other hand, this method does not require shareable satellites between the cooperating agents, being a less demanding technique in terms of sky visibility conditions. PR, SD, and DD methods require instead the exchange of multiple pseudorange measurements between pair of collaborating receivers, as shown in
Table 1. Of course, the larger is the amount of disclosed GNSS observables, the higher is the capability of the users to accurately guess the location of collaborating agents. Recent advances in homomorphic encription [
36] can be promising solutions to overcome such privacy issues in the aforementioned technique but at the cost of additional complexity. To tackle this aspect, the IAR was proposed in [
31] as a ranging method that requires a reduced number of shared GNSS observables. It aims at overcoming the computational complexity issue, reducing the amount of transmitted data, and natively introducing ambiguity in the retrieval of other users’ locations.
Each receiver employs, in general, a different set of satellites to compute its position. The intersection of the two sets could even contain no elements, making some of the aforementioned techniques unsuitable in harsh environments. Indeed, observing less than three shareable satellites, only APD and IAR can be employed to compute the range between the agents (
Table 1). As an example, in the limiting scenario shown in
Figure 2b, only one satellite can be shared due to the presence of obstacles that obstruct the LOS. Contextually, applicability analyses performed in urban context have shown a limited availability for traditional differential methods. An example of the number of satellites in common view in a real urban scenario is indeed reported in
Figure 3. The data were collected by observing satellite signals through a Global Positioning System (GPS) receiver, which is arguably the most widespread GNSS user equipment.
Throughout the observation window, the limited number of satellites (upper plot) prevents the availability and continuity of the GNSS-based ranging techniques in some time intervals (lower plot). The experimental example shown in
Figure 3 provides a hint on the fluctuations in the number of visible GPS satellites experienced by a pair of single-constellation receivers. According to the requirements of
Table 1, this motivates the need for complementary techniques for estimating baseline distances among low-cost, personal devices sharing few satellites in LOS.
2.3. Inter Agent Ranging
A simplistic scenario in which two agents,
A and
B, observe in LOS a common satellite is recalled in
Figure 4. The general use case is shown in
Figure 4a, and it can be easily mapped to the formal geometrical arrangement of
Figure 4b, which is exploited in the following description.
For an intuitive approach, the position of the shared satellite will be hereafter associated with the letter
C and identified as the upper vertex of the triangle formed with the agents’ locations. The scheme depicts a static scenario or equivalently the snapshot of a kinematic scenario at a given time instant,
, without any lack of generality. To discuss the theoretical framework of the IAR, the basic geometry is hereafter defined by considering exact measurements and positions, assumed as sides and vertices of this geometrical arrangement. The steering vectors are defined according to (
8), pointing towards the shared satellite
C, whose coordinates are known from the ephemeris broadcasted through the navigation message [
42] or retrieved through network connectivity. Given the true satellite-to-user ranges
and
and the associated steering vectors
and
, the IAR can be computed by solving for
, by means of the Carnot theorem (or law of cosines). The resulting computation is
where
is the angle included between the two steering vectors w.r.t. the shared-satellite
C. It can be computed using the dot product as
The equivalence in (
13) is due to the unitary norm of steering vectors, by definition. Looking at a first basic implementation of this collaborative ranging approach, the agents will be hereafter distinguished as
A, the aided agent, which initializes the cooperation asking for the cooperative baseline estimation
B, the aiding agent, which supports the aided agent allowing it to gather the cooperative estimate required.
This terminology will be adopted also addressing the aforementioned differential ranging methods.
A more detailed view of the proposed methodology is included in
Figure 5, showing how the estimation of the inter-personal distancing (
12) is performed within the cooperative framework.
In fact, according to (
12), an aided agent
A that wants to compute the inter-personal distance should (i) measure
and
, (ii) retrieve from
B an estimate of
, and (iii) obtain a measure of
from the cooperation with
B. It is worth noticing that the accomplishment of (iii) can be attained either by sharing
and let
B perform the estimation of (
13) or by gathering
from
B and locally compute (
13). A set of variants of the IAR algorithm were proposed in which the roles of the agents can be swapped [
31] or re-arranged [
43]. However, the formalization of a protocol does not alter the properties of the method and it is therefore out of the scope of this work.
2.3.1. Time Consistency of Input Measurements
To retrieve an estimate of the baseline through (
12), a user needs to obtain a measure of the quantities involved in the IAR computation by establishing the cooperation with an available aiding agent.
Figure 6 describes the IAR construction on a temporal axis, assuming that the agents
A and
B are not synchronous. The solid dots highlight the measurements epochs at which each receiver estimates the position and updates its measurement vector, both for agent
A and agent
B. The variable
is the time difference between agents’ measurements epochs, while
is the Round Trip Time, which is mainly determined by the communication network. The processing time needed for the computation of (
12) can be reasonably neglected.
Let us suppose that agent
A sends a request, at time
.
A retrieves the range,
and computes the steering vector
.
A is able to send the timestamped steering vector to
B. Such a request is received by an aiding agent at time
, at a time epoch, which can fall randomly between two measurement epochs of the aiding receiver. The misalignment between agent’s measurement epochs must be taken into account to manage the time-inconsistent measurements of the receivers. In other words, the ranges
and
that concur to the computation of (
12) must be consistent, even if they are estimated by agents at a different time instant. By knowing the ephemeris and timestamps of the received data, the aiding agent can compensate for the satellite motion (see
Figure 6) through
The closest measurements in time that
B can use are the measurements taken at time
, which are then compensated for
seconds by linear regression to make them as consistent as possible with the information provided by
A.
B computes the angle
in (
13) using the predicted
and the received
. At time
,
A receives
and
and determines
through (
12). The communication latency only affects the aging of the estimated IAR, which is computed
seconds after
A’s measurement epoch
. This time compensation operation is performed by the “Synchronization” block in
Figure 5.
2.3.2. Privacy Issues
It has to be noticed that, even considering the ideal IAR computation (
12), the position of the aiding agent at
can not be retrieved by the aided agent
A given
and
. The dot product in (
13) is not invertible; therefore, agent
A can obtain only an ambiguous knowledge of the position of
B. It can assume that its position lies on a circle, referred to as
ambiguity circumference , and shown in
Figure 4b. Such
ambiguity circumference is the locus of the points at distance
from the receiver
A and
from the satellite
C. By the aiding side, the only knowledge of the steering vector
bounds the uncertainty on the location of
A to a straight line, named
ambiguity line, passing through points
,
and the center of
. This partial protection of the locations of the agents is one of the main advantages of the IAR technique.
3. Statistical Modelling for Inter Agent Ranging
Up to now, all the measurements have been considered exact to formalize the basic problem. However, the joint effect of incorrect satellite-to-receiver range measurements and the time-dependent geometry of the observed satellites characterize the distribution of the positioning solution, thus the computation of (
12) and (
13). Input uncertainties must be taken into account to evaluate the error propagation. Therefore, the inputs of (
12) are replaced by the corresponding random variables, obtaining
where
is computed according to (
14).
A key point in the analysis of the IAR measurement as a random variable regards the effects of nonlinearity of (
17) on the modeled input random variables (i.e., pseudoranges). Although the computation is performed through a nonlinear equation, previous works assessed that, similarly to Euclidean distance, the error distribution of the IAR can be approximated with a Gaussian distribution when Gaussian inputs are considered and the positioning error is negligible w.r.t. the baseline length [
31]. Statistical moments of such a distribution are hereafter derived expanding the range terms according to the pseudorange error model in (
9). Satellite-to-receiver ranges are characterized by different standard deviations
and
for each GNSS receiver and shared satellite
C. To limit the notation complexity, all the references to the shared satellite
C and time index
will be dropped hereafter. Similarly, the range
and the steering vector
will be written as
and
, respectively.
3.1. Bias Modelling
Consider a generic function of
n random variables
and its Taylor expansion about the mean values
where all the partial derivatives of
are evaluated at
, as well. Truncating the expansion at the first order and applying the expected value to (
19), it becomes
since the first-order terms are canceled by the expected value operator. The same operations applied to (
17) lead to
which is the definition of the ideal IAR (
12), assuming zero-mean distribution of the error affecting the variables
,
and
. According to (
21), Equation (
17) can be wrongly thought of as an unbiased estimator of
since
. However, the statistical behavior of the estimated IAR, obtained through a Monte Carlo simulation campaign, shows generally non-null values of the bias, whose distribution depends on the considered geometry.
Figure 7 shows the value of the estimated IAR bias depending on the position of the shared satellite.
Each point of the skyplot corresponds to a pair of azimuth and elevation coordinates of the shared satellite and the associated colormap varies according to the value of the estimation bias. The cooperating agents’ locations are fixed with the aided agent in (0,0) and a distance
m between the two. The standard deviations of the UERE are set to
m according to the nominal value of GPS error budget [
34]. The plots also show how the value of the bias is dependent on
. The non-null bias contributions are attributed to the terms in the Taylor expansion which are truncated due to their higher order. Nonetheless, their value is small if compared to the simulated baseline.
3.2. Variance Modelling
The truncation of the Taylor expansion applied to (
17) is exploited to obtain a closed-form approximation of the estimated
IAR variance as well. The variance of a function of multiple random variables is derived as
where
is the
correlation coefficient [
44] of two random variables
,
defined as
Consequently, the variance of
can be written as
which can be easily expressed in a closed-form by computing the partial derivatives. Equation (
24) will be referred to as
generalized theoretical formula for the IAR variance.
Two ranges measured by two different receivers can be considered uncorrelated after the application of the bias corrections in (
5). Moreover, the angle
, computed through the steering vectors, maintains a very poor correlation to a single specific range among those involved in the computation of the positioning solution (
6). Thanks to these remarks, it is reasonable to assume uncorrelated variables in (
22). In other words,
when
and (
22) becomes
The variance of the estimated IAR
can be then approximated as
where
is as in (
12) and highlights the dependency from the true value of the baseline.
In [
45], a simplified equation of the IAR variance was computed for two users lying on the same Local Tangent Plane (LTP), assuming null steering error, i.e., an ideal estimation of the angle
(
13). Under the same assumptions, it can be shown that (
26) and the solution derived in [
45] are equivalent if and only if
i.e., when the satellite is equidistant from the two peers. The characterization provided in this paper is therefore consistent with the distribution presented in [
45], considering that the condition
cancels the third term in (
26). The model presented in this paper generalizes the empirical derivation provided in [
45] to the case where the two users do not lie on the same LTP.
As done for the bias, the values obtained through (
26) by varying the location of the shared satellite can be reported on a skyplot.
Figure 8 depicts the output of (
26) for an aided agent
A in (0,0) w.r.t. the azimuth and elevation of the shared satellite. The specific position of the aiding agent
B is highlighted and reasonable values for
,
and
have been considered.
The skyplots in
Figure 8 show the behavior of (
26) for different values of
. A symmetry perpendicular to the baseline direction is clearly visible for null and small values of
. When this term increases due to degraded positioning performances, the IAR standard deviation
also increases assuming a more uniform distribution, as in
Figure 8c. From these findings on the IAR error distribution w.r.t. the geometry of the multi-agent system, it can be noticed that the bias has an inverse behavior w.r.t. the standard deviation such that a shared satellite located in a low bias region of the skyplot induces a high variance of the estimated IAR and vice versa.
The skyplots in
Figure 9 are obtained as the difference between simulated and theoretically computed
in the same scenario of
Figure 8.
The theoretical formula is proved as a suitable variance estimator, exhibiting a negligible mismodeling error w.r.t. the simulated values in the vast majority of cases (dark-blue areas in
Figure 9). Furthermore, the mismatch between the two is always lower than
m. As the steering error
increases, a non-negligible error can be observed in the areas characterized by high IAR standard deviation values. This is particularly visible in
Figure 9c, which is relative to the values of
reported in
Figure 8c. This behavior can be reasonably attributed to the neglected cross-correlated terms in (
26) that become more relevant as
increases (
24), as well as to the truncation of the Taylor expansion.
The symmetry shown in
Figure 8 is preserved in the case of azimuth rotation of the aiding peer, as highlighted by
Figure 10. For the sake of completeness, we report also
Figure 11, which shows the effect of the movement of agent
B by varying both elevation and azimuth w.r.t. the agent
A.
If multiple shareable satellites are available, a suitable model allows the selection of the satellite which is expected to provide the best trade-off between bias and variance of the estimation error. The variance computed through (
26) or through the generalized theoretical Formula (
24) can therefore influence the choice of the satellite, provided that the aiding agent is able to estimate
,
,
and
, while
and
are estimated by the aided agent.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}