
Low Field Optimization of a Non-Contacting High-Sensitivity GMR-Based DC/AC Current Sensor

 ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
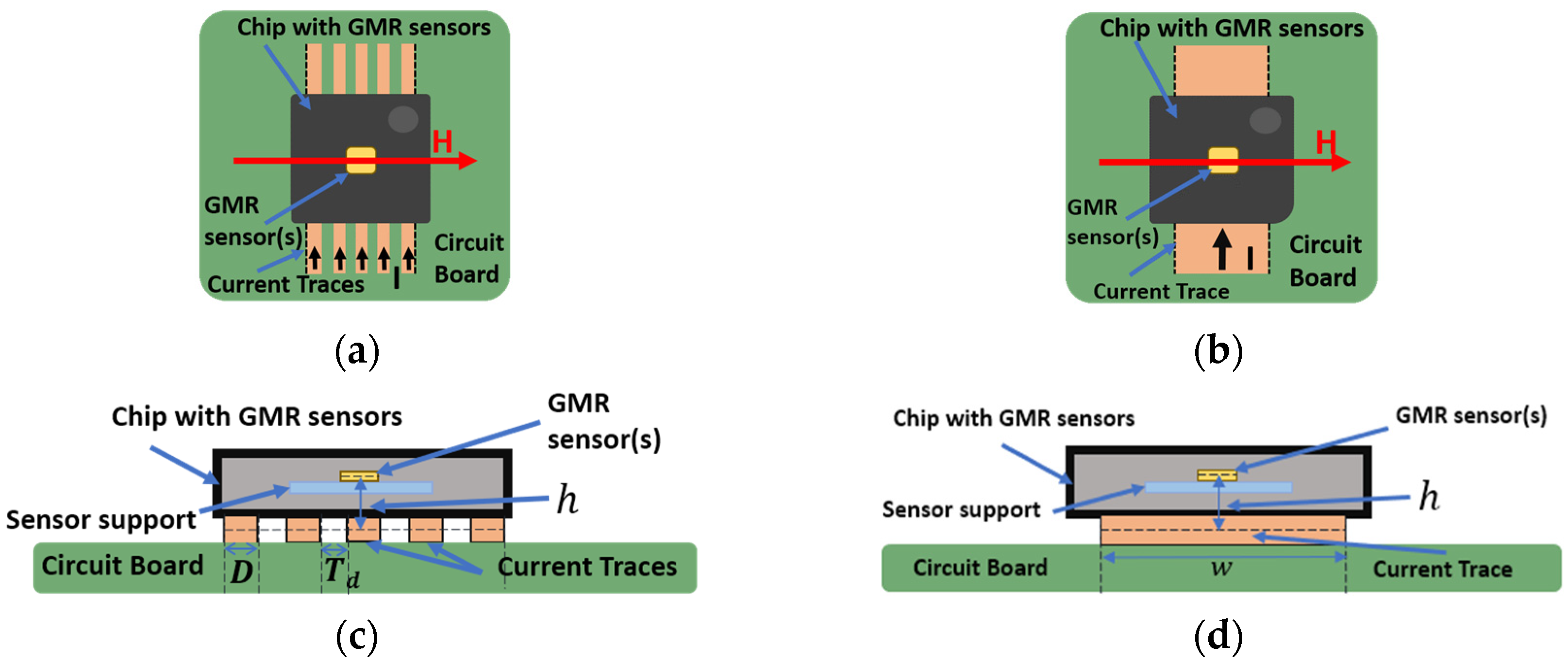
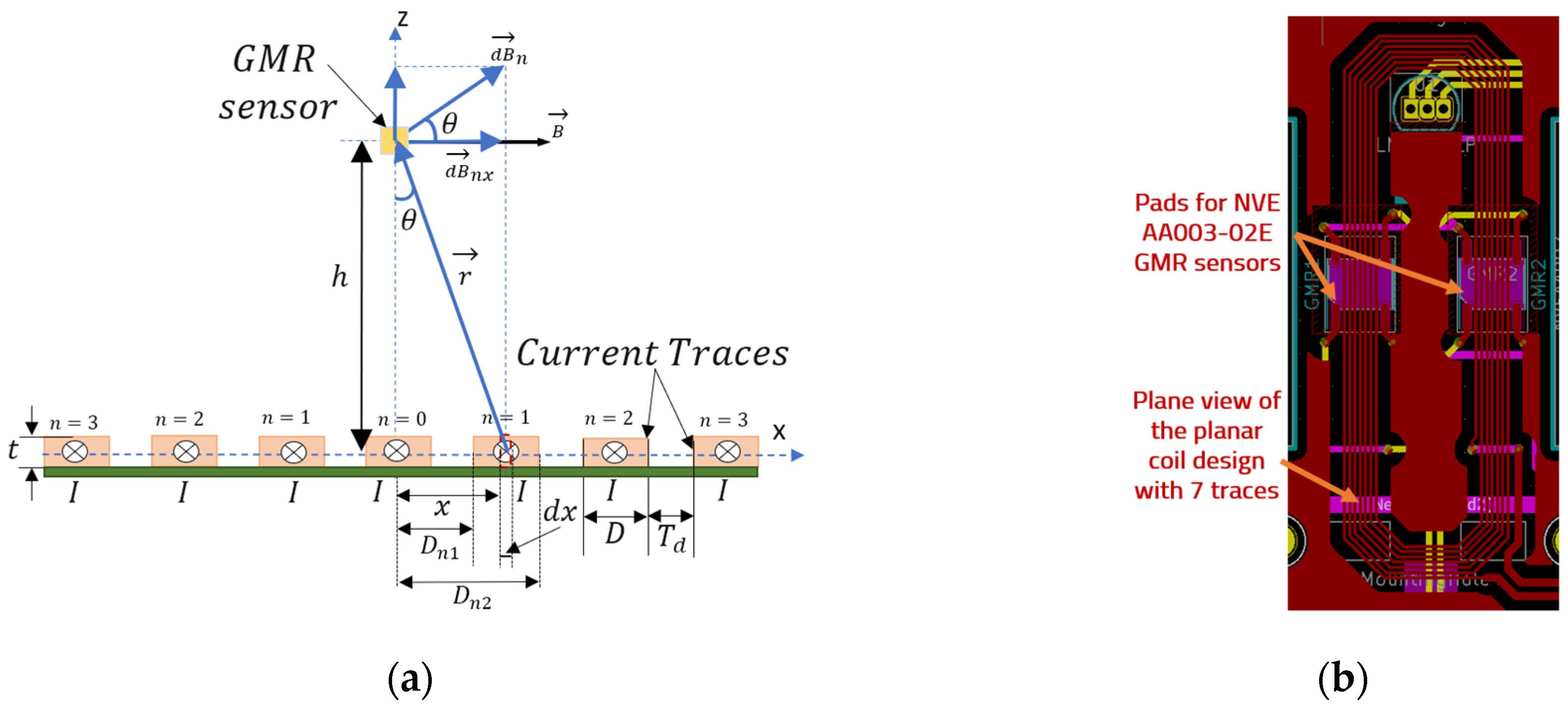
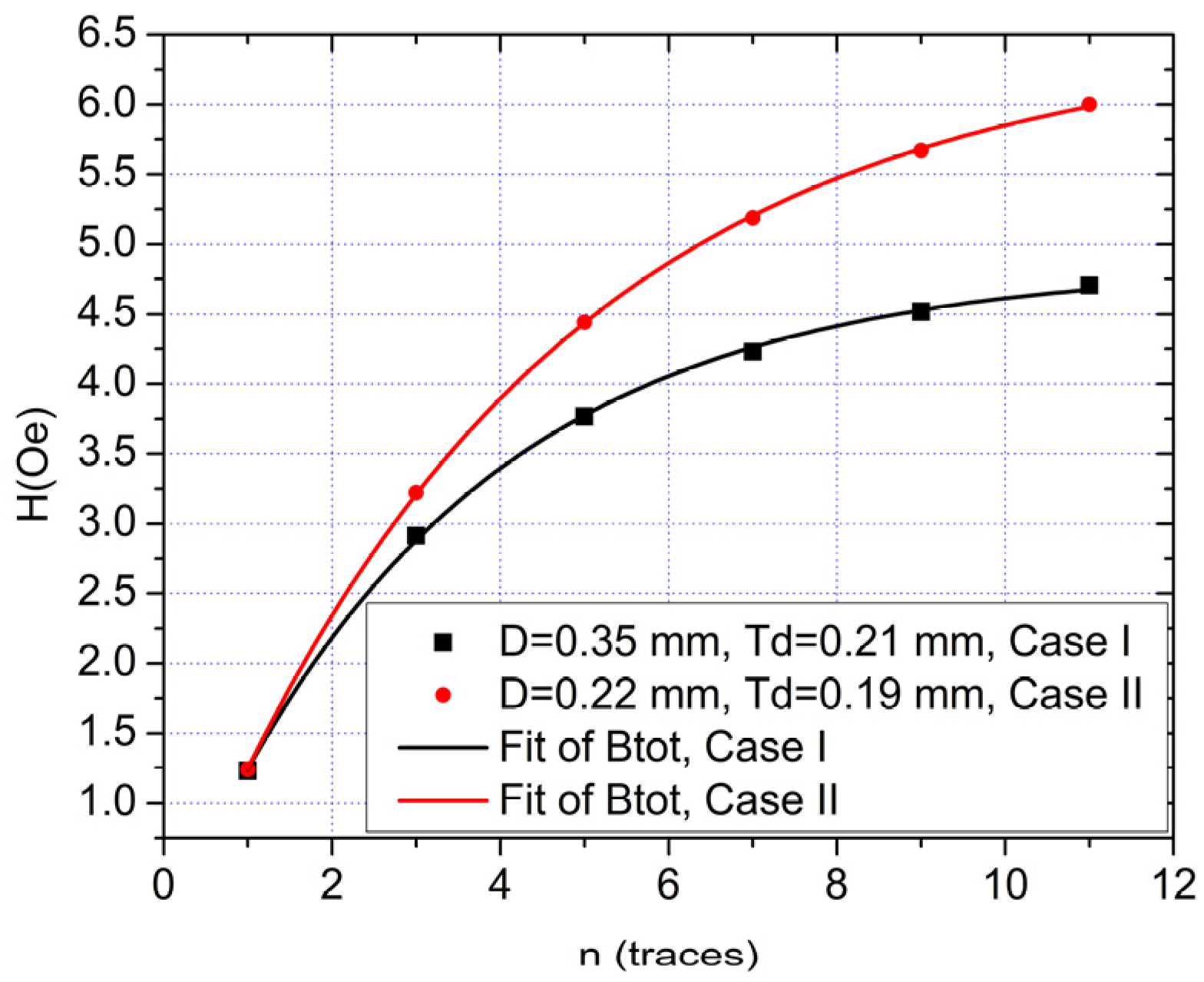
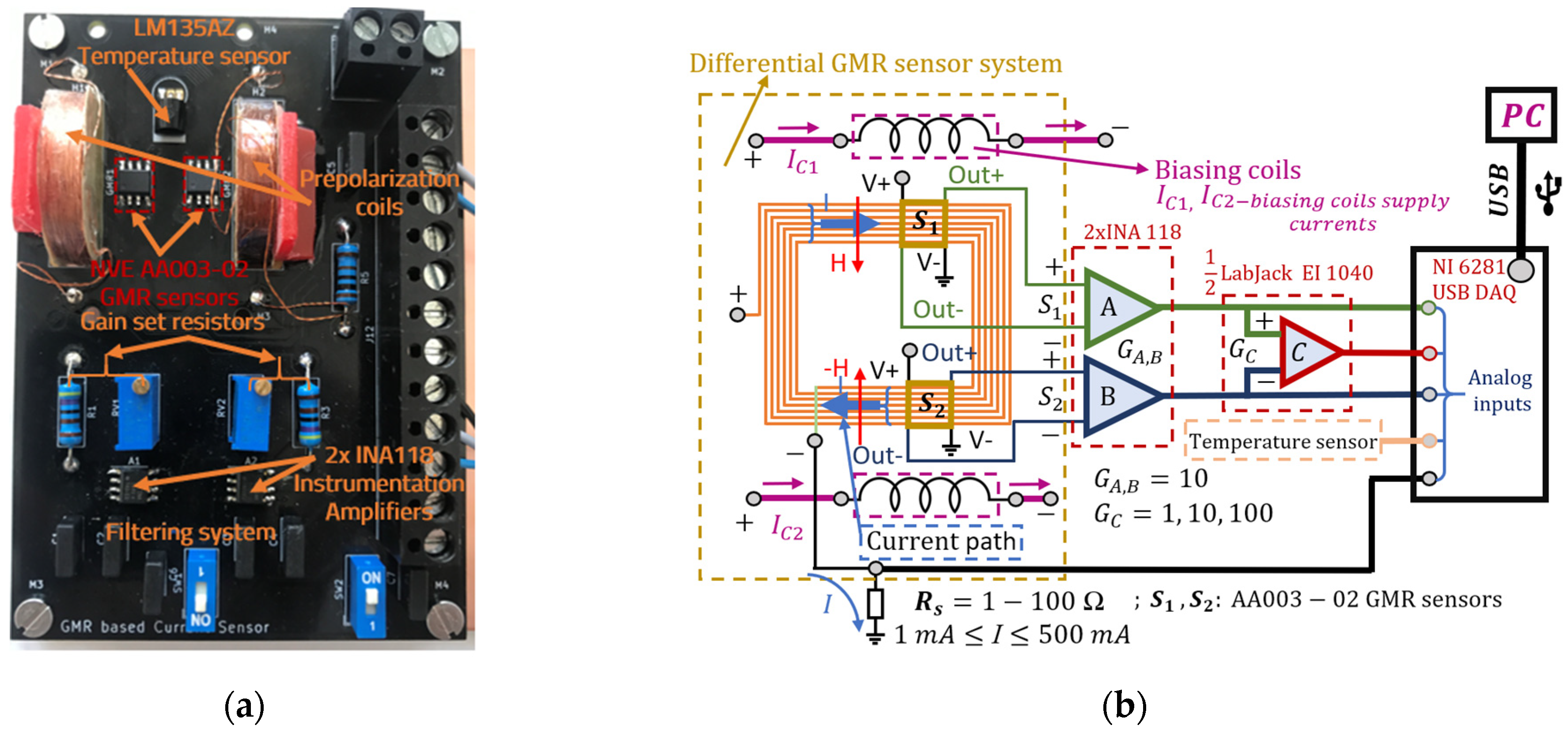
2.1. Principle of Operation
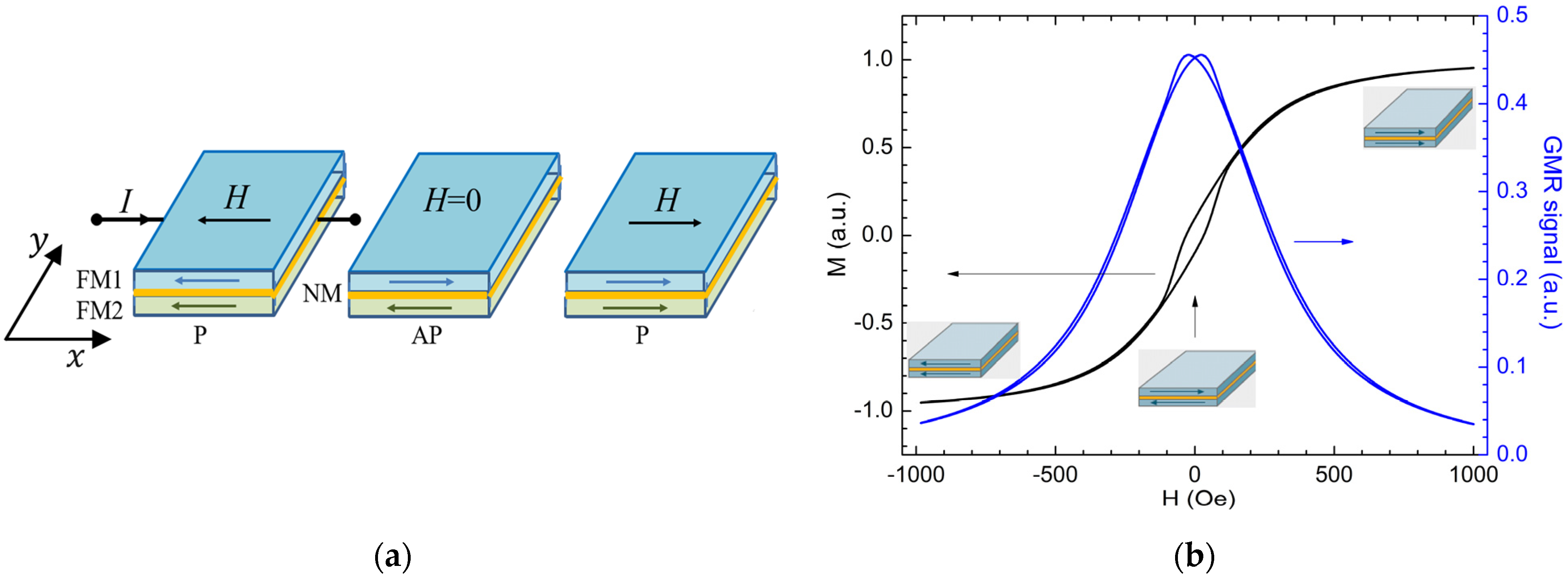
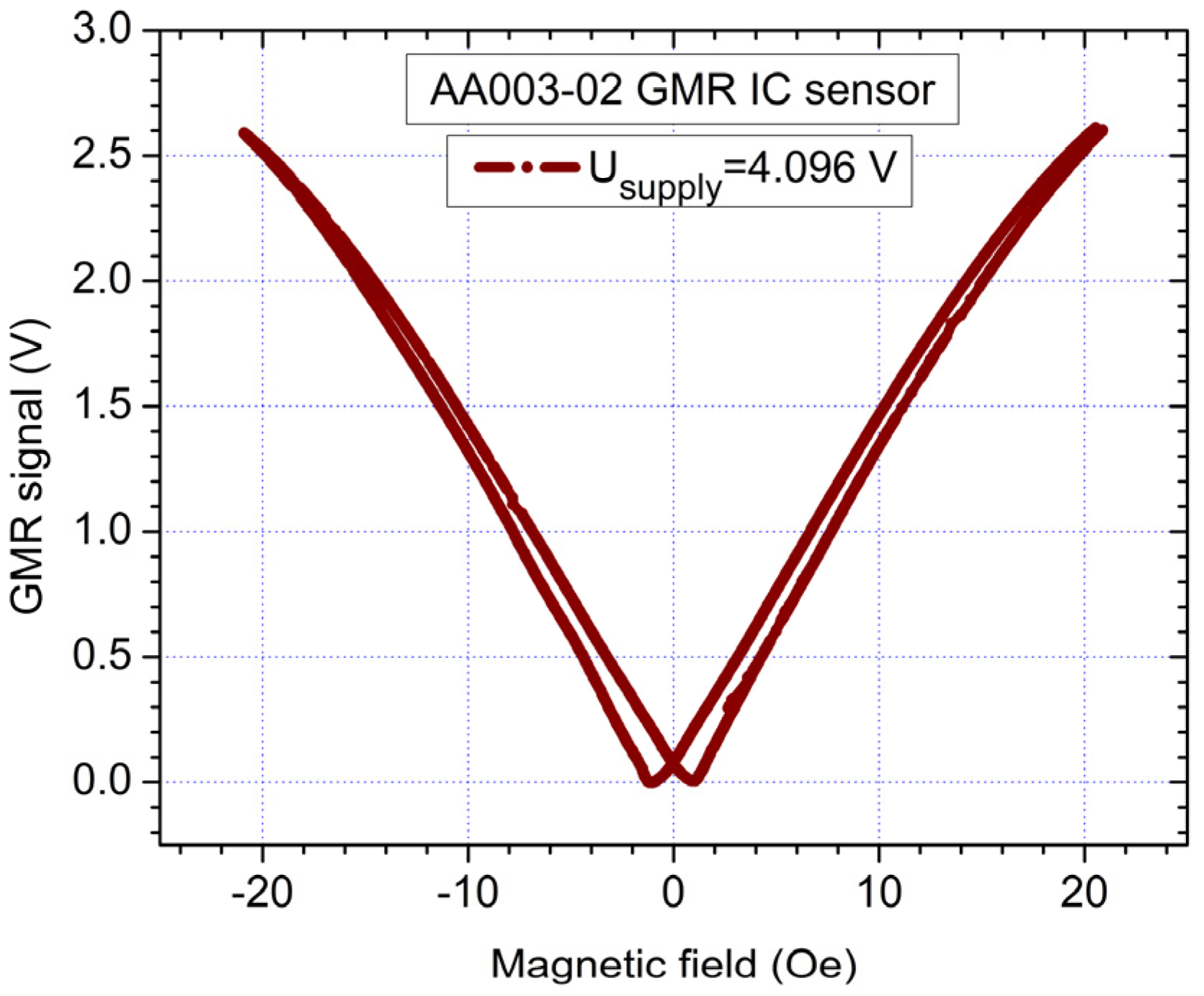
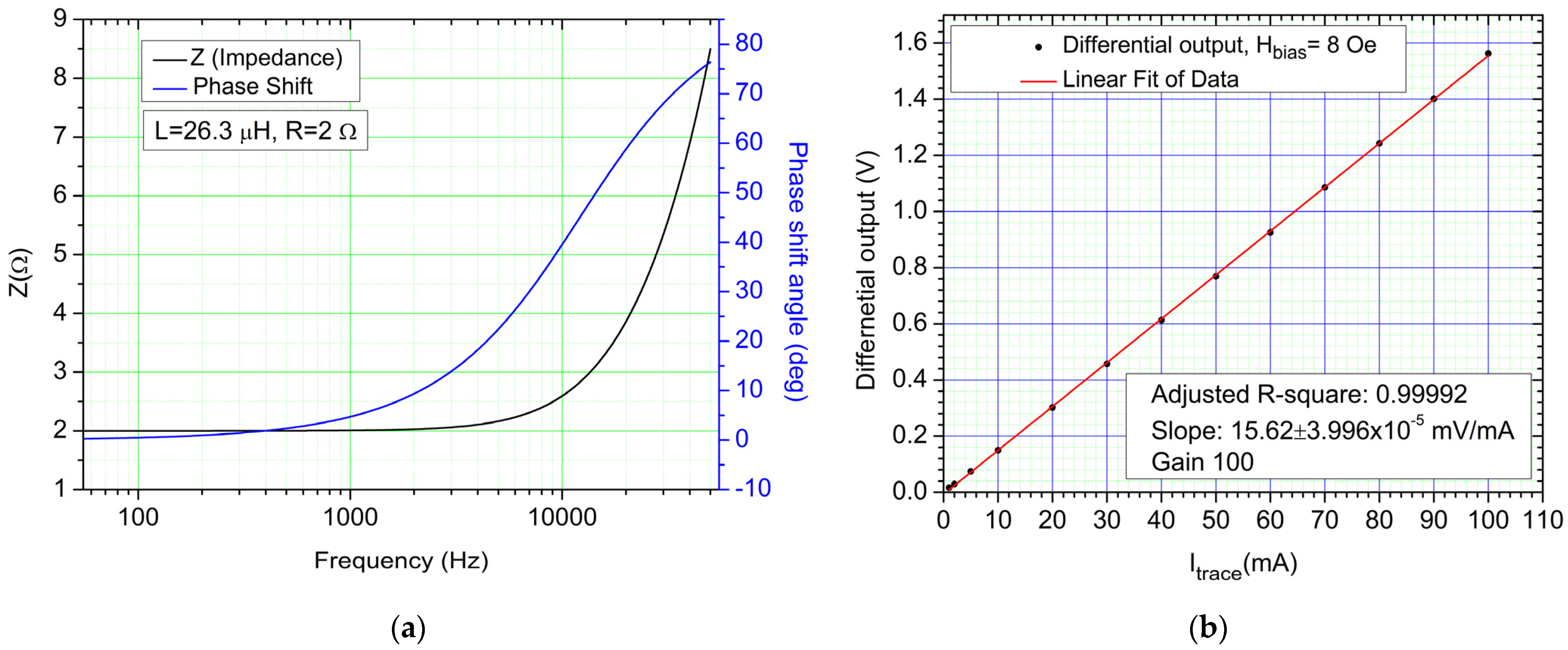
2.2. Characterization of the GMR Sensor
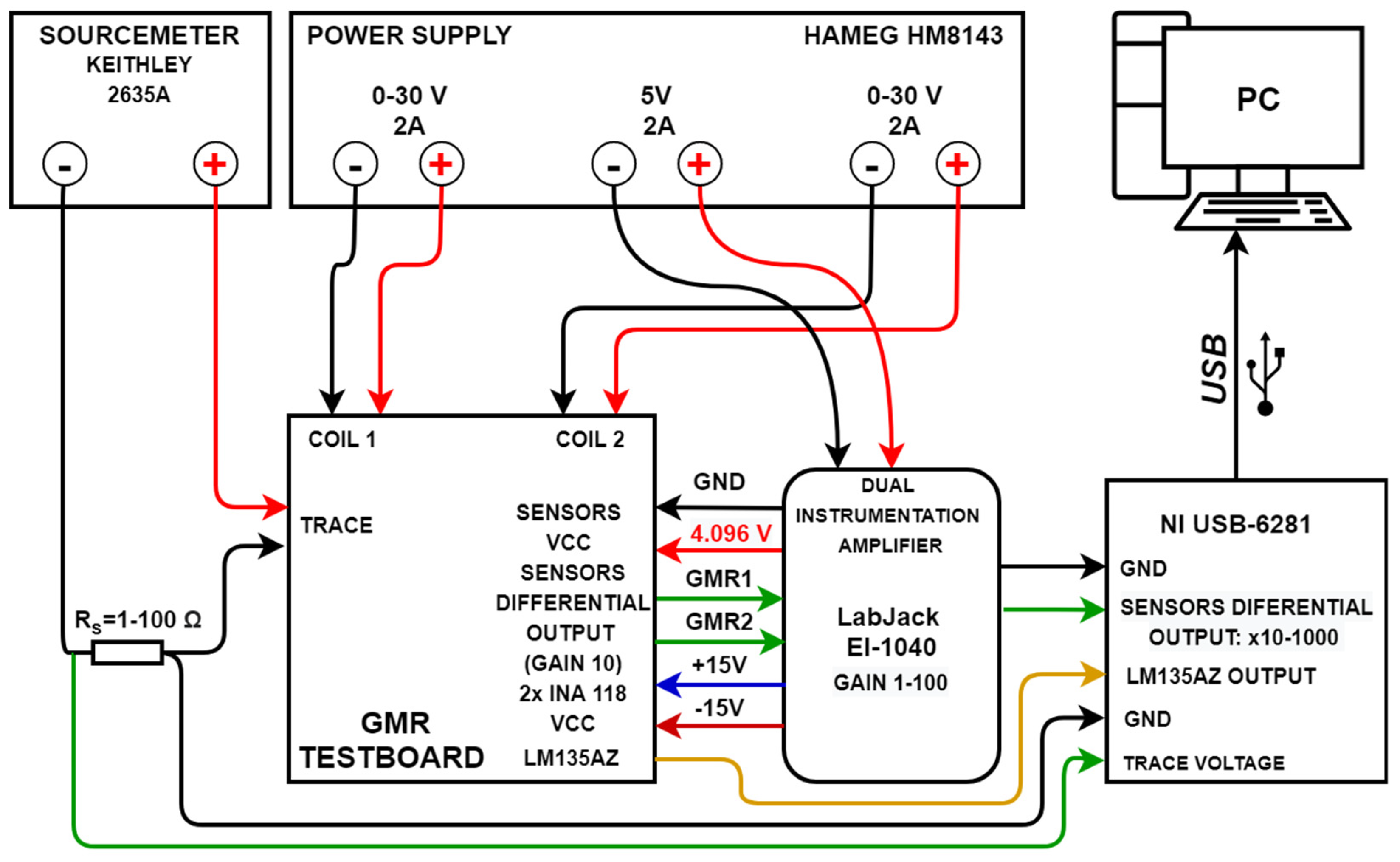
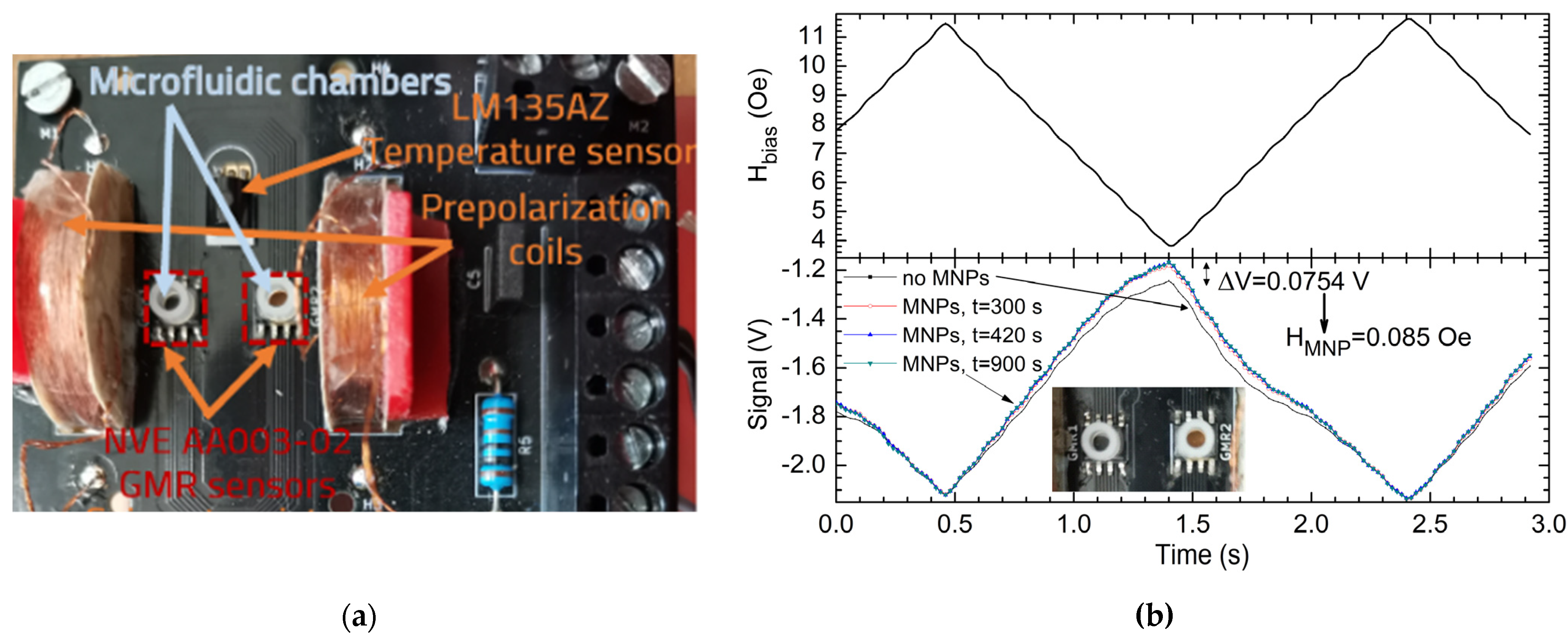
2.3. Experimental Setup and Mode of Operation
3. Results and Discussion
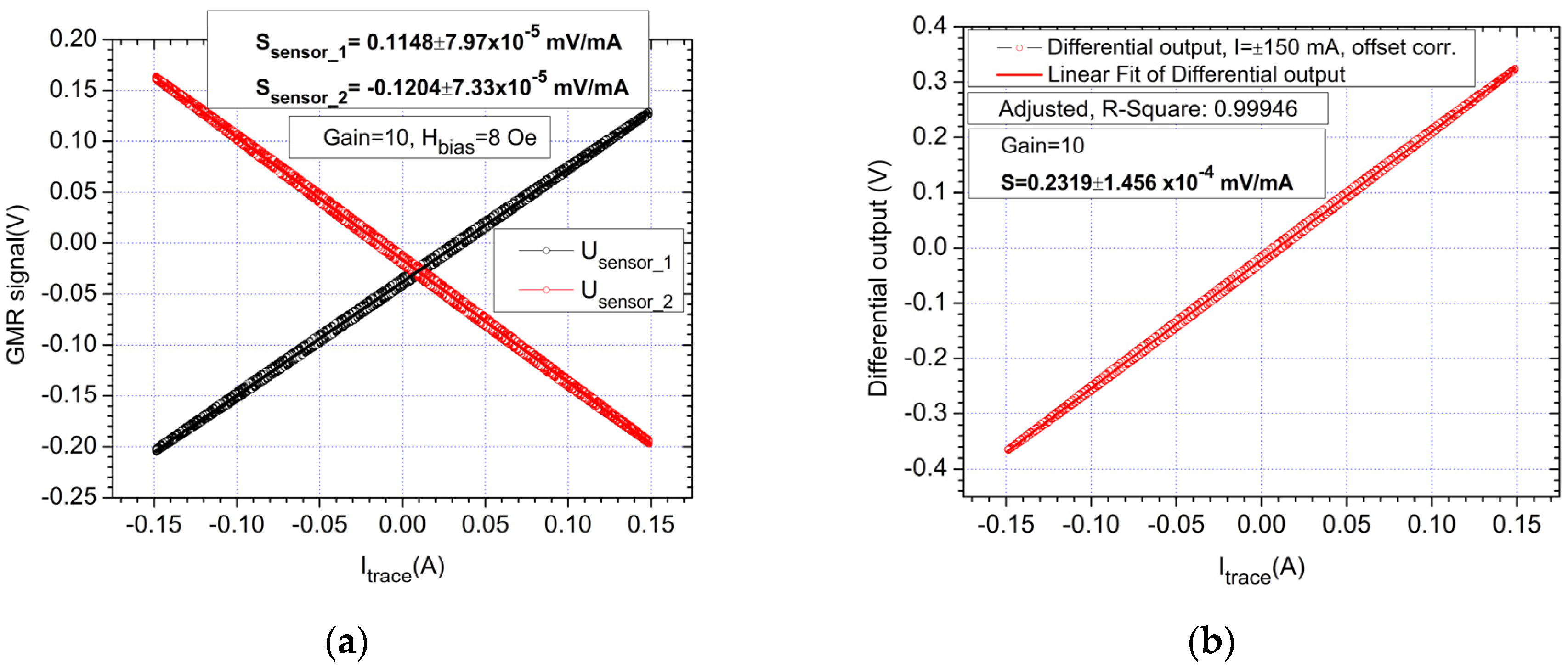
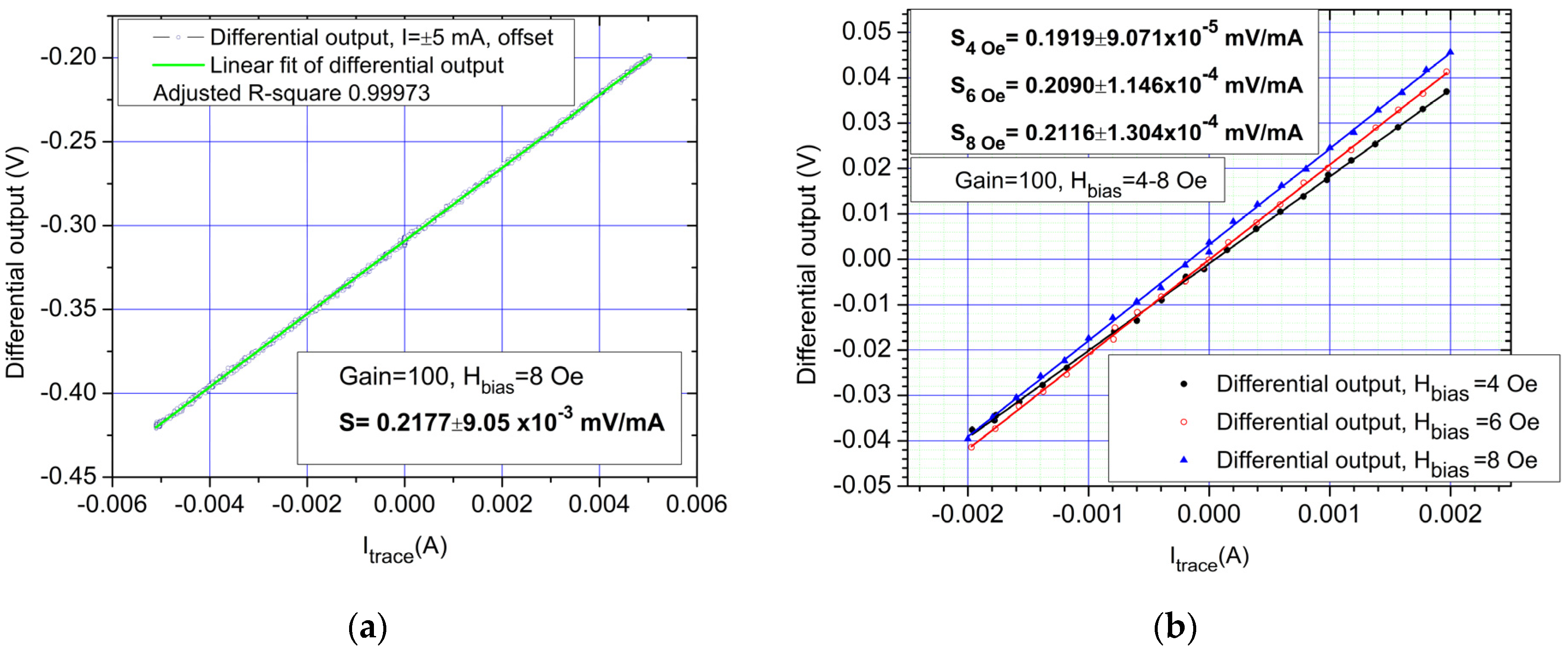
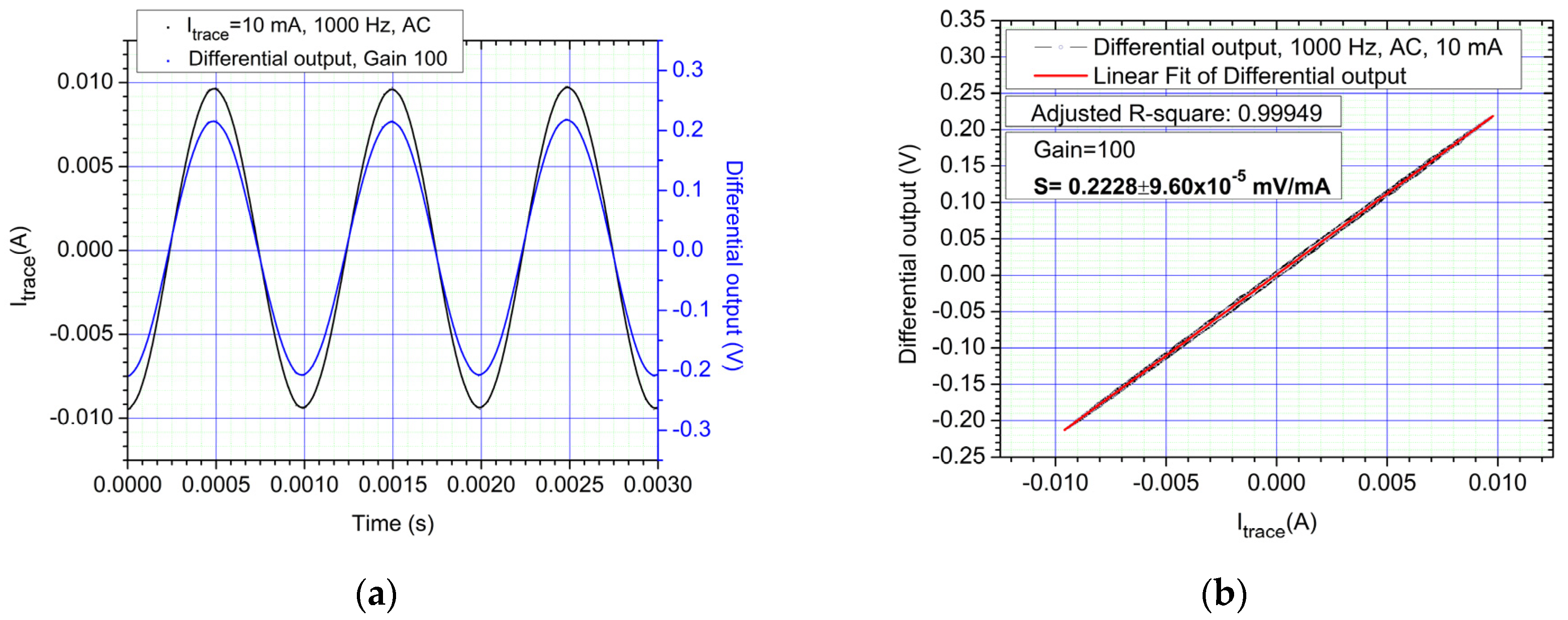
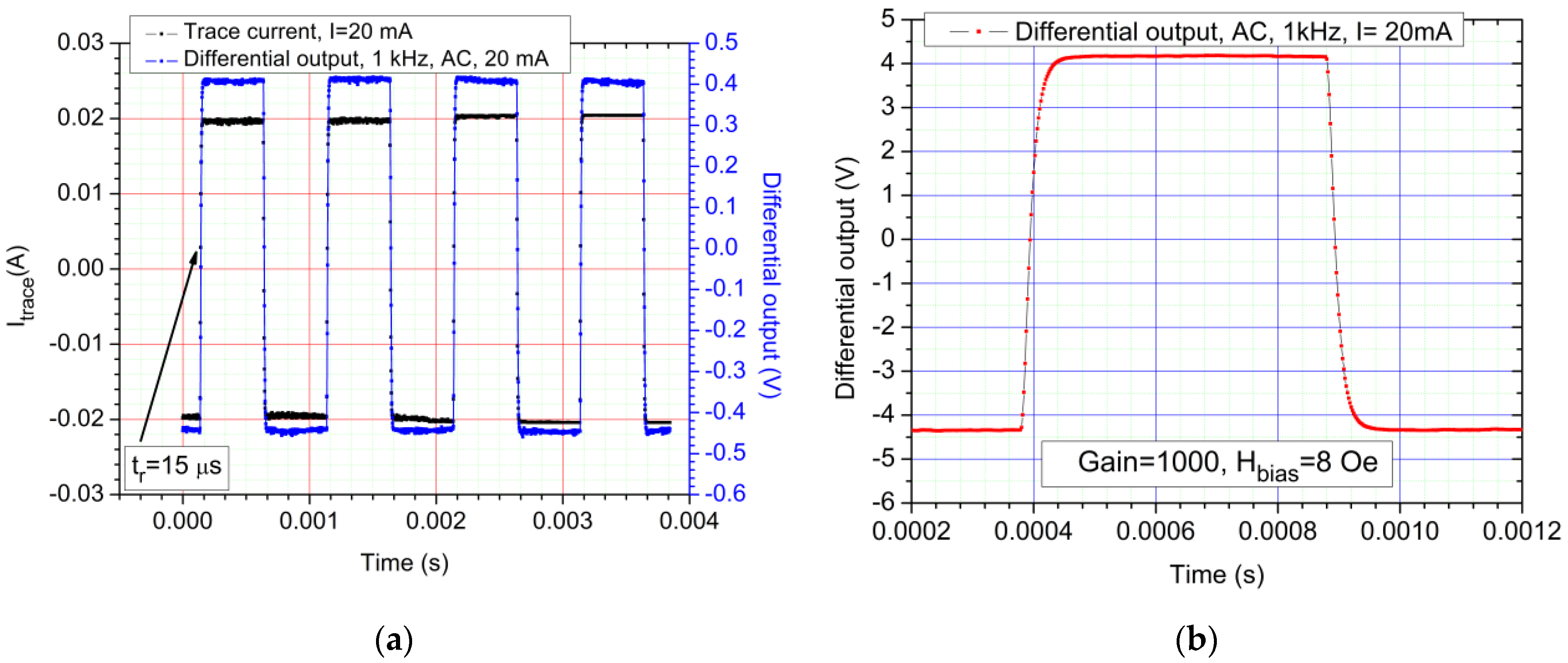
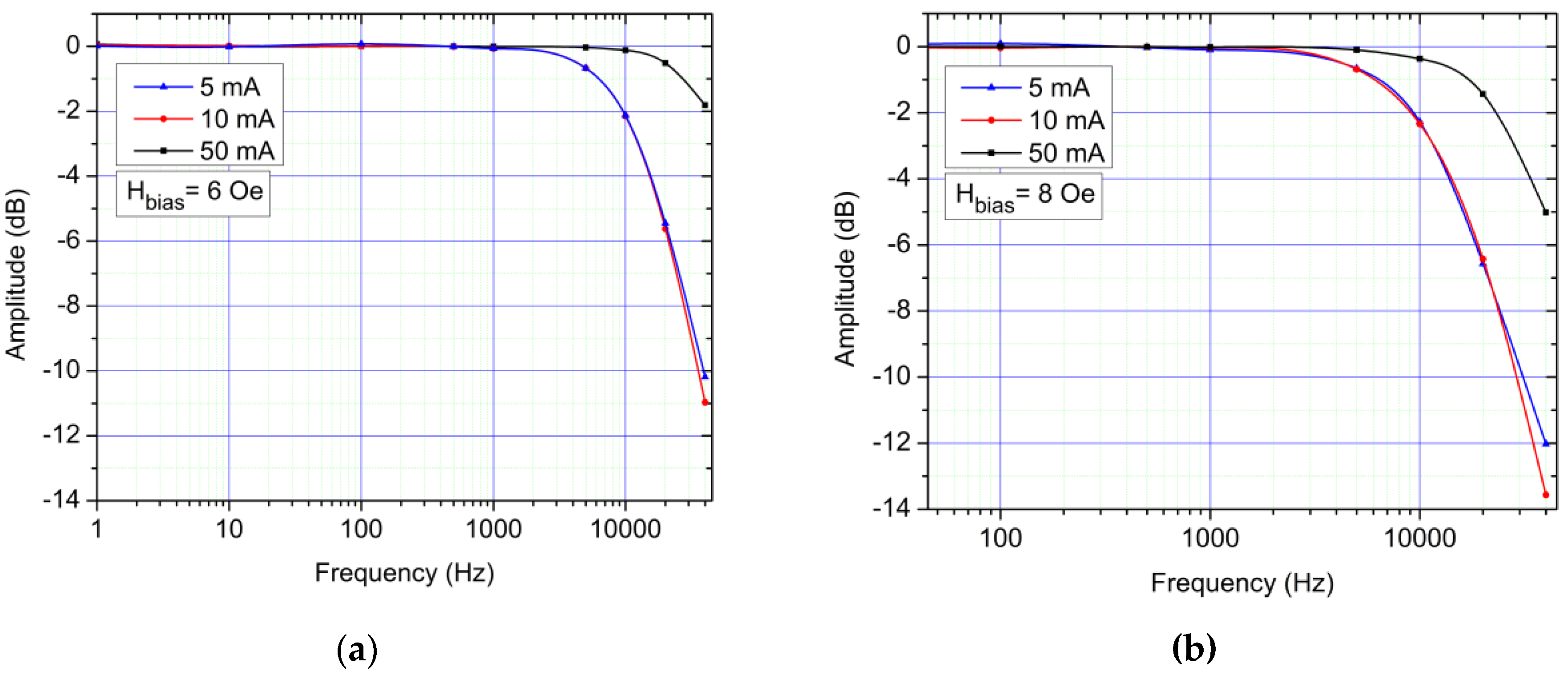
3.1. Experimental Results for the Current Measurement Setup
3.2. Experimental Results for the Magnetic Nanoparticles Detection Setup
3.3. State of the Art Comparison
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | D [mm] | Td [mm] | I [A] | µ0 [H/m] | h [mm] | Dn1 [mm] | Dn2 [mm] |
|---|---|---|---|---|---|---|---|
| Value | 0.22 | 0.19 | 0.5 | 4π × 10−7 | 0.8 | Equation (A1) | Equation (A2) |
References
- Patel, A.; Ferdowsi, M. Current Sensing for Automotive Electronics—A Survey. IEEE Trans. Veh. Technol. 2009, 58, 4108–4119. [Google Scholar] [CrossRef]
- Soliman, E.; Hofmann, K.; Reeg, H.; Schwickert, M. Noise study of open-loop direct current-current transformer using magneto-resistance sensors. In Proceedings of the 2016 IEEE Sensors Applications Symposium (SAS), Catania, Italy, 20–22 April 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Ripka, P. Electric current sensors: A review. Meas. Sci. Technol. 2010, 21, 112001. [Google Scholar] [CrossRef]
- Ripka, P.; Draxler, K.; Styblikova, R. AC/DC Current Transformer with Single Winding. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Lenz, J.E. A review of magnetic sensors. Proc. IEEE 1990, 78, 973–989. [Google Scholar] [CrossRef]
- Ripka, P.; Mlejnek, P.; Hejda, P.; Chirtsov, A.; Vyhnánek, J. Rectangular Array Electric Current Transducer with Integrated Fluxgate Sensors. Sensors 2019, 19, 4964. [Google Scholar] [CrossRef]
- Yatchev, I.; Sen, M.; Balabozov, I.; Kostov, I. Modelling of a Hall Effect-Based Current Sensor with an Open Core Magnetic Concentrator. Sensors 2018, 18, 1260. [Google Scholar] [CrossRef]
- Mlejnek, P.; Vopalensky, M.; Ripka, P. AMR current measurement device. Sens. Actuators A 2008, 141, 649–653. [Google Scholar] [CrossRef]
- Poon, T.Y.; Tse, N.C.F.; Lau, R.W.H. Extending the GMR Current Measurement Range with a Counteracting Magnetic Field. Sensors 2013, 13, 8042–8059. [Google Scholar] [CrossRef]
- Mușuroi, C.; Oproiu, M.; Volmer, M.; Firastrau, I. High Sensitivity Differential Giant Magnetoresistance (GMR) Based Sensor for Non-Contacting DC/AC Current Measurement. Sensors 2020, 20, 323. [Google Scholar] [CrossRef]
- Vidal, E.G.; Muñoz, D.R.; Arias, S.I.R.; Moreno, J.S.; Cardoso, S.; Ferreira, R.; Freitas, P. Electronic Energy Meter Based on a Tunnel Magnetoresistive Effect (TMR) Current Sensor. Materials 2017, 10, 1134. [Google Scholar] [CrossRef]
- Lee, J.; Oh, Y.; Oh, S.; Chae, H. Low Power CMOS-Based Hall Sensor with Simple Structure Using Double-Sampling Delta-Sigma ADC. Sensors 2020, 20, 5285. [Google Scholar] [CrossRef] [PubMed]
- Weiss, R.; Mattheis, R.; Reiss, G. Advanced giant magnetoresistance technology for measurement applications. Meas. Sci. Technol. 2013, 24, 082001. [Google Scholar] [CrossRef]
- Lee, S.; Hong, S.; Park, W.; Kim, W.; Lee, J.; Shin, K.; Kim, C.-G.; Lee, D. High Accuracy Open-Type Current Sensor with a Differential Planar Hall Resistive Sensor. Sensors 2018, 18, 2231. [Google Scholar] [CrossRef] [PubMed]
- Jogschies, L.; Klaas, D.; Kruppe, R.; Rittinger, J.; Taptimthong, P.; Wienecke, A.; Rissing, L.; Wurz, M.C. Recent Developments of Magnetoresistive Sensors for Industrial Applications. Sensors 2015, 15, 28665–28689. [Google Scholar] [CrossRef]
- Yang, X.; Xie, C.; Wang, Y.; Wang, Y.; Yang, W.; Dong, G. Optimization Design of a Giant Magneto Resistive Effect Based Current Sensor with a Magnetic Shielding. IEEE Trans. Appl. Supercond. 2014, 24, 1–4. [Google Scholar] [CrossRef]
- Jedlicska, I.; Weiss, R.; Weigel, R. Linearizing the Output Characteristic of GMR Current Sensors through Hysteresis Modeling. IEEE Trans. Ind. Electron. 2010, 57, 1728–1734. [Google Scholar] [CrossRef]
- Li, Z.; Dixon, S. A Closed-Loop Operation to Improve GMR Sensor Accuracy. IEEE Sens. J. 2016, 16, 6003–6007. [Google Scholar] [CrossRef]
- Hudoffsky, B.; Roth-Stielow, J. New evaluation of low frequency capture for a wide bandwidth clamping current probe for ±800 A using GMR sensors. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–7. [Google Scholar]
- Ouyang, Y.; He, J.; Hu, J.; Wang, S.X. A Current Sensor Based on the Giant Magnetoresistance Effect: Design and Potential Smart Grid Applications. Sensors 2012, 12, 15520–15541. [Google Scholar] [CrossRef]
- Rijks, T.; Coehoorn, R.; De Jong, M.; De Jonge, W. Semiclassical calculations of the anisotropic magnetoresistance of NiFe-based thin films, wires, and multilayers. Phys. Rev. B 1995, 51, 283. [Google Scholar] [CrossRef]
- NVE Sensors Catalogue. Available online: https://www.nve.com/Downloads/catalog.pdf (accessed on 5 April 2021).
- The Object Oriented MicroMagnetic Framework (OOMMF). Available online: https://math.nist.gov/oommf/ (accessed on 5 April 2021).
- INA118 Instrumentation Amplifier Datasheet. Available online: https://www.ti.com/lit/ds/symlink/ina118.pdf (accessed on 5 April 2021).
- LabJack EI1040 Datasheet. Available online: https://labjack.com/support/datasheets/accessories/ei-1040 (accessed on 5 April 2021).
- National Instruments NI 6281 DAQ Datasheet. Available online: https://www.ni.com/pdf/manuals/375218c.pdf (accessed on 5 April 2021).
- Volmer, M.; Avram, M. Using permalloy based planar hall effect sensors to capture and detect superparamagnetic beads for lab on a chip applications. J. Magn. Magn. Mater. 2015, 381, 481–487. [Google Scholar] [CrossRef]
- Volmer, M.; Avram, M. Signal dependence on magnetic nanoparticles position over a planar Hall effect biosensor. Microelectron. Eng. 2013, 108, 116–120. [Google Scholar] [CrossRef]
- Park, J. Superparamagnetic nanoparticle quantification using a giant magnetoresistive sensor and permanent magnets. J. Magn. Magn. Mater. 2015, 389, 56–60. [Google Scholar] [CrossRef]
- Aceinna Current Sensors Catalogue. Available online: https://www.aceinna.com/current-sensors (accessed on 5 April 2021).
- Texas Instruments TMCS1100 Hall Current Sensor Datasheet. Available online: https://www.ti.com/lit/ds/symlink/tmcs1100.pdf (accessed on 5 April 2021).
- Allegro Microsystems ACS70331 Series GMR Current Sensor Datasheet. Available online: https://www.allegromicro.com/en/products/sense/current-sensor-ics/zero-to-fifty-amp-integrated-conductor-sensor-ics/acs70331 (accessed on 5 April 2021).
- Sensitec Current Sensors Catalogue. Available online: https://www.sensitec.com/products-solutions/current-measurement/cfs1000 (accessed on 5 April 2021).
- Snoeij, M.F.; Schaffer, V.; Udayashankar, S.; Ivanov, M.V. Integrated Fluxgate Magnetometer for Use in Isolated Current Sensing. IEEE J. Solid-State Circuits 2016, 51, 1684–1694. [Google Scholar] [CrossRef]
- Volmer, M.; Avram, M. Micromagnetic Simulations on Detection of Magnetic Labelled Biomolecules Using MR Sensors. J. Magn. Magn. Mater. 2009, 321, 1683–1685. [Google Scholar] [CrossRef]
- Xu, J.; Li, Q.; Gao, X.; Lv, F.; Guo, M.; Zhao, P.; Li, G. Shandong. Detection of the Concentration of MnFe2O4 Magnetic Microparticles Using Giant Magnetoresistance Sensors. IEEE Trans. Magn. 2015, 52. [Google Scholar] [CrossRef]














| Parameter | This Work | [10] | [9] | MCA1101-xx-5 Series [30] | TMCS1100A Series [31] | ACS70331 Series [32] | [14] |
|---|---|---|---|---|---|---|---|
| Sensor technology | GMR | GMR | GMR | AMR | Hall | GMR | PHR (planar Hall resistance) |
| Sensor setup sensitivity | 0.1562 to 0.2319 mV/mA | 0.0272 to 0.0307 mV/mA | 0.03 to 0.04 V/A 3 | 35 mV/A to 350 mV/A | 50 to 400 mV/A | 200 to 800 mV/A | 1.2 mA/LSB (12 bit) |
| Measurement range | DC: ±2 mA to ±300 mA 1 AC: ±2 mA to ±300 mA 1 | DC: ±75 mA to ±4 A AC: ±150 mA to ±4 A | ±45 A | ±5 to ±50 A | ±5.75 A to ±46 A | 0–2.5 A to ±5 A | ±1.2 A |
| Detection limit | DC: 100 µA AC: 100 to 300 µA | 4 mA | N/A | 10 mA | N/A | 5 mA | 5 mA |
| Power consumption | Setup: ~258 mW 2 Sensors: 6.4 mW 2 | ~6.4 mW | 1.6 to 3.2 W | ~32.5 to 35 mW | 33 mW (no Vout load); 640 mW 4 | 14.9 mW | 13 mW |
| Calibration | Yes, biasing coil system | Yes, adjustable permanent magnet | Yes, biasing coil system | N/A | N/A | Yes, Analog-to-digital converter | Yes, Analog-to-digital converter |
| Advantages | Disadvantages |
|---|---|
| High sensor sensitivity: 0.1562 to 0.2319 mV/mA | Limited measurement range (2–300 mA) 1 |
| Low detection limit: DC: 100 µA AC: 100 to 300 µA | Coil biasing system consumes extra power 2 |
| Precision biasing with coils | Hybrid setup 3 |
| Precision DC/AC current sensing | Moderate components integration level |
| Moderately low power consumption (note Table 1) | - |
| Possibility for MNPs measurements | - |
| Low temperature drift of the offset: −2.59 × 10−4 A/°C | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mușuroi, C.; Oproiu, M.; Volmer, M.; Neamtu, J.; Avram, M.; Helerea, E. Low Field Optimization of a Non-Contacting High-Sensitivity GMR-Based DC/AC Current Sensor. Sensors 2021, 21, 2564. https://doi.org/10.3390/s21072564
Mușuroi C, Oproiu M, Volmer M, Neamtu J, Avram M, Helerea E. Low Field Optimization of a Non-Contacting High-Sensitivity GMR-Based DC/AC Current Sensor. Sensors. 2021; 21(7):2564. https://doi.org/10.3390/s21072564
Chicago/Turabian StyleMușuroi, Cristian, Mihai Oproiu, Marius Volmer, Jenica Neamtu, Marioara Avram, and Elena Helerea. 2021. "Low Field Optimization of a Non-Contacting High-Sensitivity GMR-Based DC/AC Current Sensor" Sensors 21, no. 7: 2564. https://doi.org/10.3390/s21072564
APA StyleMușuroi, C., Oproiu, M., Volmer, M., Neamtu, J., Avram, M., & Helerea, E. (2021). Low Field Optimization of a Non-Contacting High-Sensitivity GMR-Based DC/AC Current Sensor. Sensors, 21(7), 2564. https://doi.org/10.3390/s21072564