
Ground Moving Target Imaging via SDAP-ISAR Processing: Review and New Trends


Abstract
1. Introduction
2. Background of Ground Moving Target Imaging
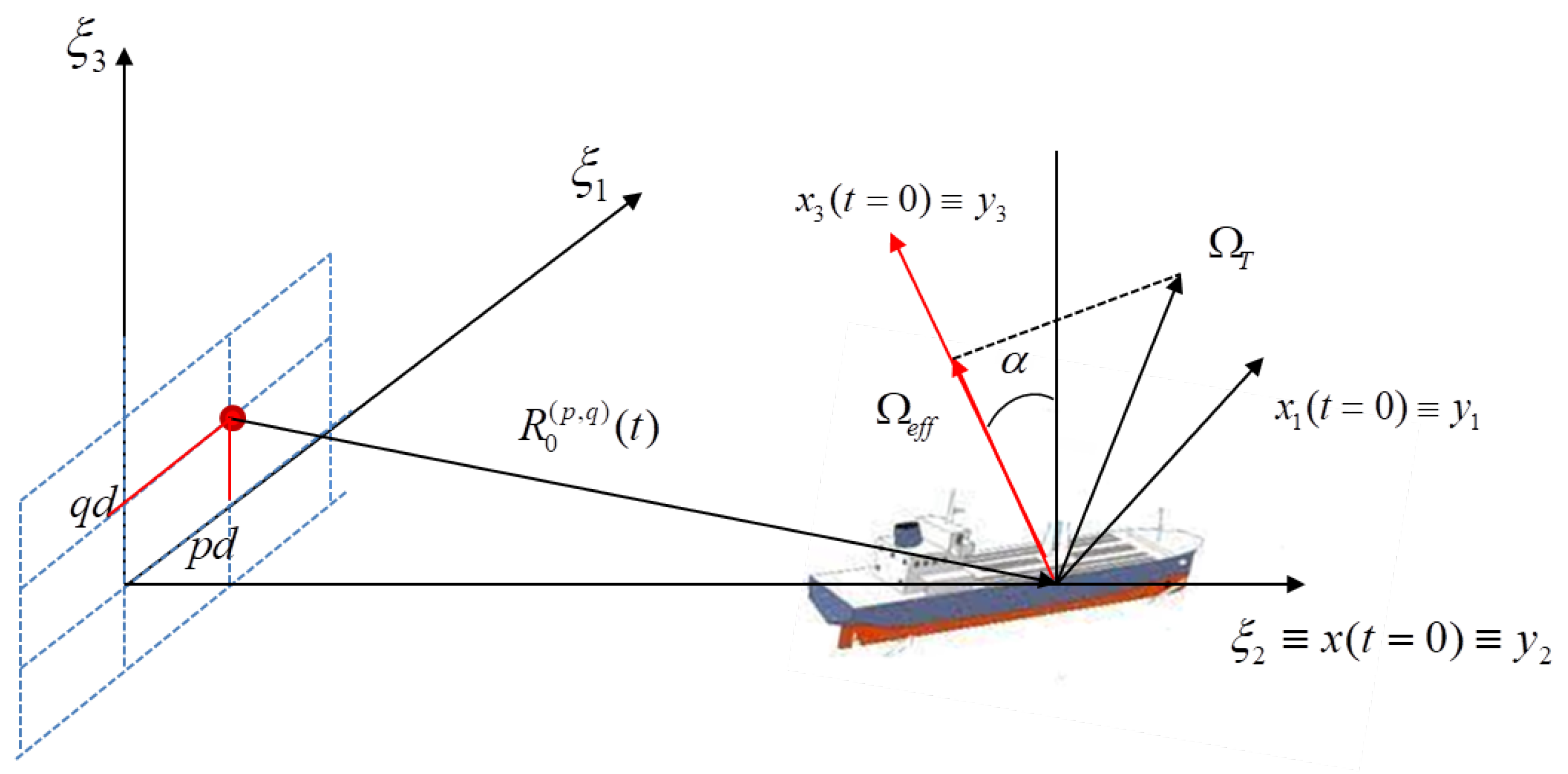
2.1. Multichannel ISAR Signal Model
2.2. High Resolution Imaging of Non-Cooperative Moving Targets
- Target DetectionThe target, independently of how well is focussed, must be detected first. Differently from maritime scenario, where the backscatter of sea clutter is typically weaker than the target’s return, the detection of moving target in ground clutter scenarios can be critical since ground clutter can often mask the target completely.
- Sub-Image SelectionAfter the first step (of target detection), each detected target must be extracted from the SAR image. This is done by separating the target’s return from clutter and other target’s returns. This is a fundamental step since each target has its own motion, which is different from that of the other targets and, therefore, its signal must be processed independently of the others. A number of sub-images equal to the number of detected targets can be obtained by processing each target’s return in parallel with separate instances of the ISAR processor.
- Sub-Image InversionA conversion from the image domain to the raw data domain is required as already implemented ISAR processors accept raw data as input. Depending on the algorithm used to form the SAR image, different algorithms can be used for image inversion.The following conditions will be here assumed: (1) the straight iso-range (or far field) approximation holds true and (2) the total aspect angle variation can be considered small enough and then the effective rotation vector can be considered constant during the CPI. Generally the received signal is defined on a polar grid in the Fourier domain. However under these approximations the Fourier domain can be approximated with a rectangular and regularly-sampled grid. Consequently, the two-dimensional Fast Fourier Transform (2D-FFT) can be used to reconstruct the image through the range Doppler algorithm. In this case the Inverse range-Doppler (IRD), which consist of a two-dimensional inverse Fourier transform, is the most viable inversion algorithm and can be easily implemented by means of an inverse 2D-FFT.A number of more accurate image reconstruction algorithms have been proposed in many years of SAR image formation research. A non-exhaustive but significant list of such algorithms follows: Omega-k also called range migration algorithm [1], Range stacking [44], Time Domain Correlation (TDC) [45] and Back-projection [1].
- ISAR ProcessingAs mentioned about, after target detection, it is possible to separate the target contribution from both the contribution of clutter and that of other targets. Through the sub-image inversion step the raw data for each sub-image can be obtained. ISAR processing can be then applied to produce a high resolution image of the moving target. It is worth emphasizing that the SAR image formation processing focuses the static scene by compensating for the movement of the platform. Therefore, only the residual motion between the radar platform and the non-cooperative moving target needs to be compensated by means of ISAR processing.
ISAR Processing
- Motion Compensation;
- Time Window Selection;
- Image Formation;
- Cross-Range Scaling.
3. Ground Moving Target Imaging via Space-Doppler Adaptive Processing
3.1. Optimum Processing
3.2. SDAP-ISAR
3.3. Use Case—SDAP-ISAR
4. Virtual SDAP
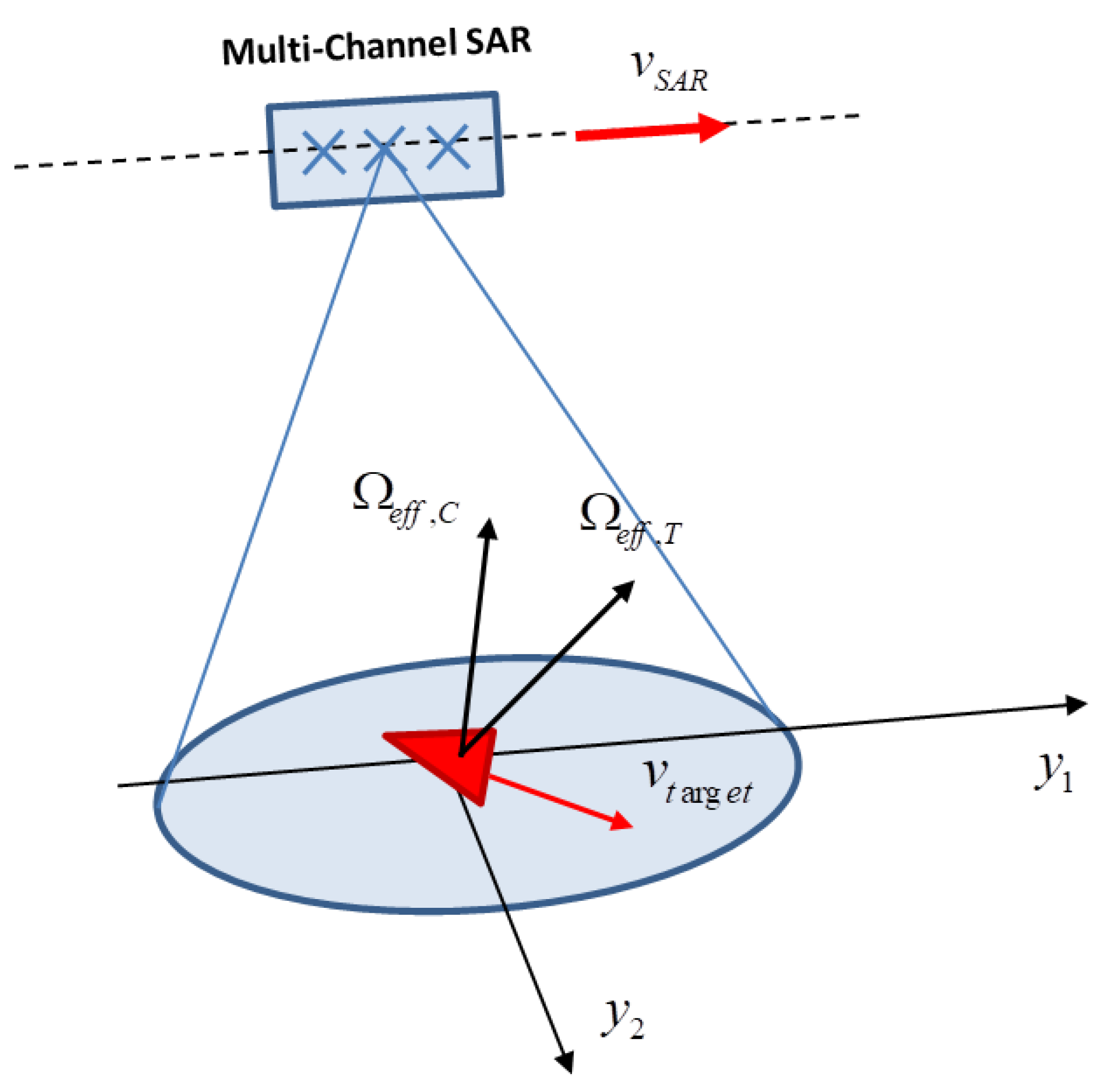
4.1. Signal Model
4.2. Clutter Component
4.3. Remarks
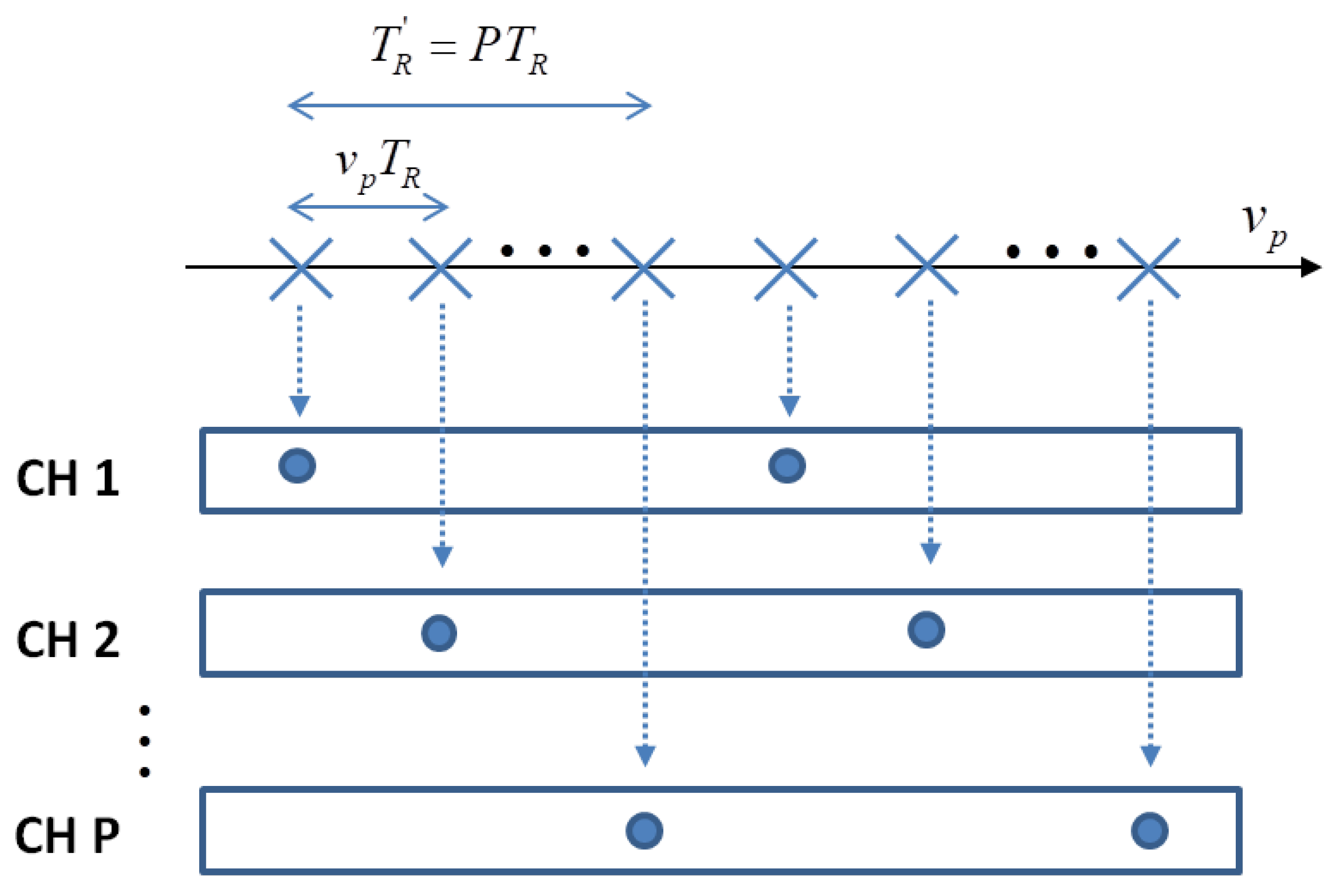
- The virtual M-SAR baseline, , and the virtual array size, , depend on the radar and the platform velocity. Both those parameters can be set without taking into account the antenna physical size. Moreover, these same parameters allow for the term to be controlled.
- The non-simultaneous acquisition across the P virtual channels, which is taken into account by the term in Equation (47), can be often ignored. In fact, in the case of stationary ground clutter, the time decorrelation can be reasonably neglected, which makes the clutter statistical description substantially identical to that of a physical M-SAR systems.
- The price to be paid for the realisation of a virtual multi-channel radar system is the reduction of the non-ambiguous Doppler region with respect to the original single channel system. Therefore, in order to form virtual channels without introducing any Doppler ambiguity over the stationary clutter bandwidth, the system should be suitably chosen.
4.4. Clutter Suppression and Imaging
4.5. Use Case—V-SDAP-ISAR
5. Cognitive Ground Moving Target Imaging
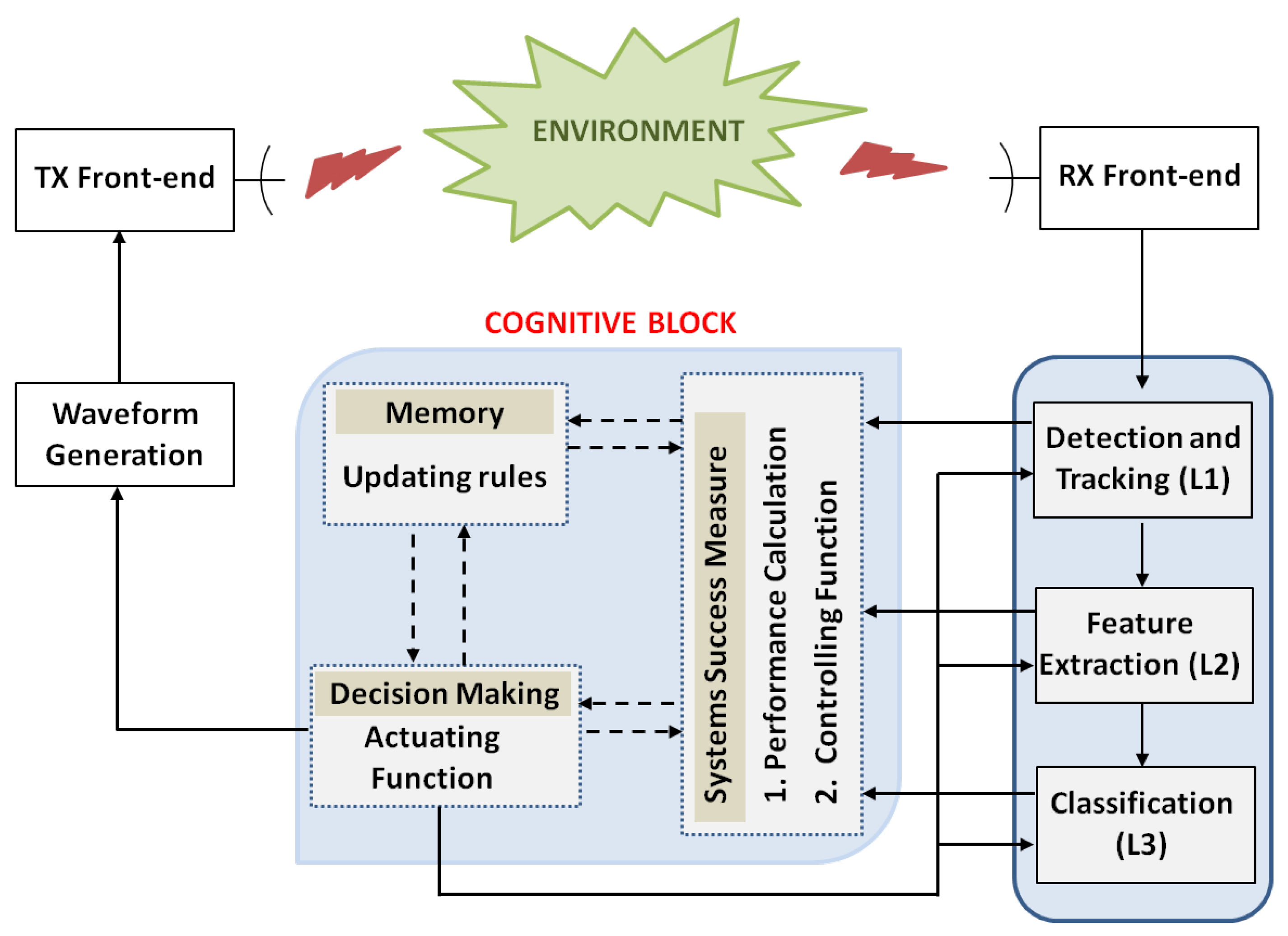
5.1. Rule-Based Cognitive Architecture
- Transmitter and receiver blocks. The transmitter adapts the transmitted waveform parameters to environmental changes in order to maintain a desired system performance. Performances are measured through a set of performance indexes, which are calculated on the received and processed signal. Cognition is applied be adopting a learning process, which is enabled through the interaction between the system and the environment and by using memory and measures of success.
- Signal processing block. It processes the received echoes according to the radar mission and the past experience. It is connected to the cognitive block with which it exchanges information and receives updated optimal parameters to achieve the desired performance for the specific radar mission.
- Cognitive block. The information extracted by the signal processing block is exploited to update the transmitting parameters. This process is based on a comparison between past and current performances, which ensures that the system learns from its past actions. The cognitive block includes three sub-blocks, namely the System Success Measure, Memory and Decision Making blocks. The fist one defines the rules, i.e., the controlling functions that account for external changes. Such rules are based on performance indexes, which are able to assess how the system reacts to the environment and to the stimuli produced by the transmitter. Each controlling function produces an output that is directly use to drive, through the actuating functions, the system’s response, which, in turn, updates the transmitting parameters. The memory keeps track of the changes that have been observed and, consequently, made by the system. The memory is a fundamental block that allows for the system to learn from its past actions. Finally, the decision making block updates transmitter’s parameters through to the actuating functions in order to optimise the system performances.
5.2. Cognitive Design for Moving Target Imaging
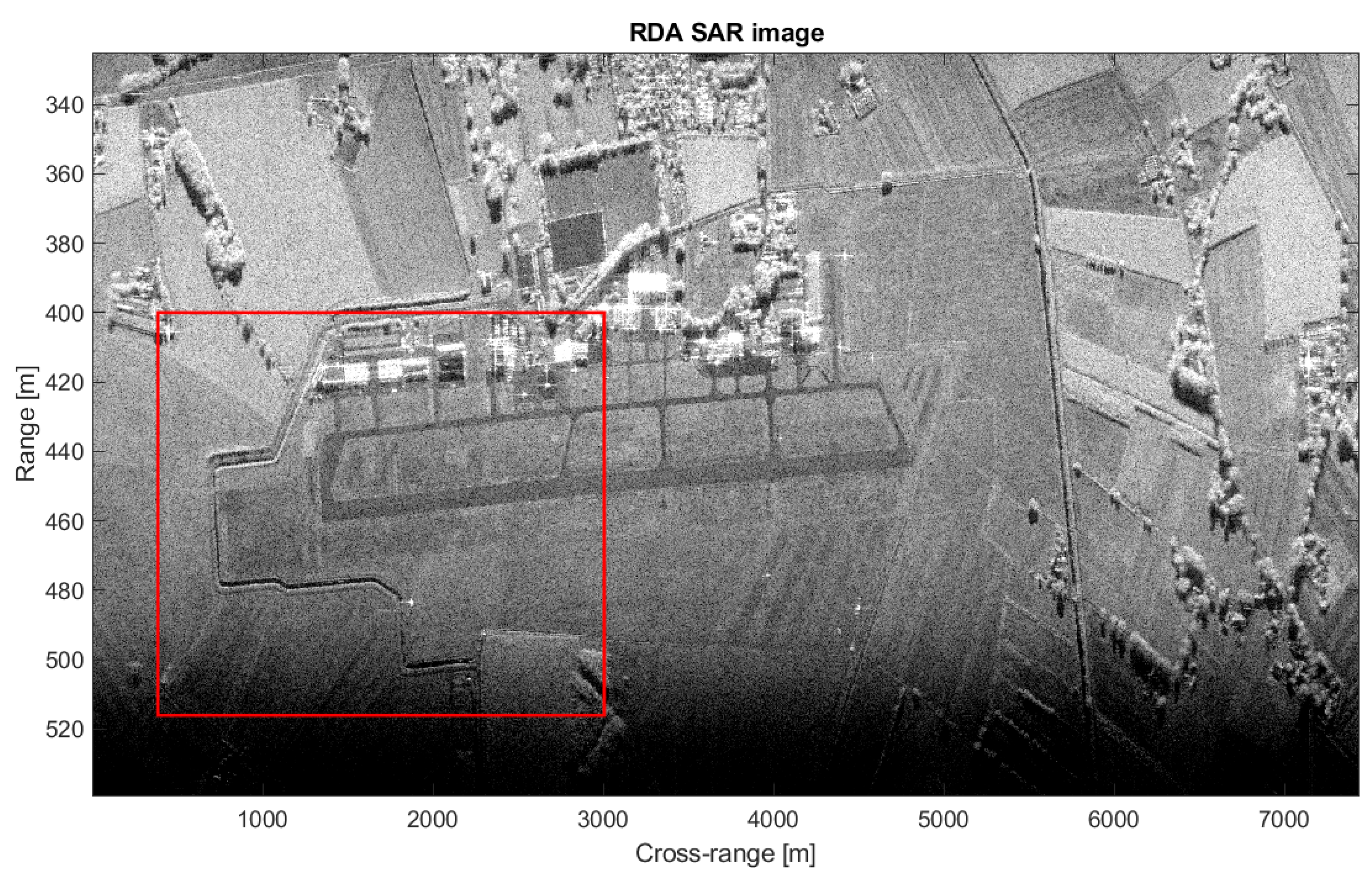
5.2.1. SAR Image Formation
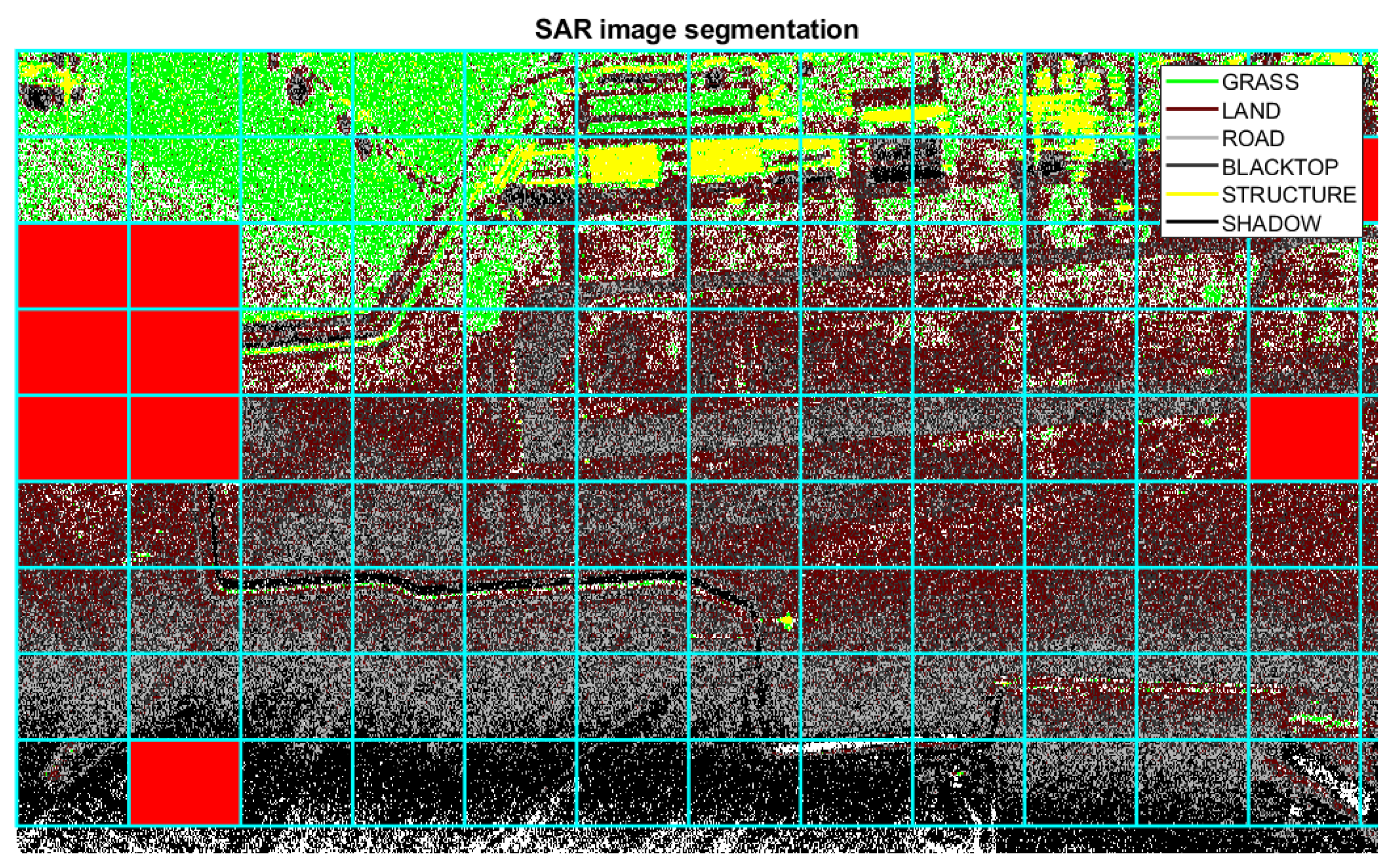
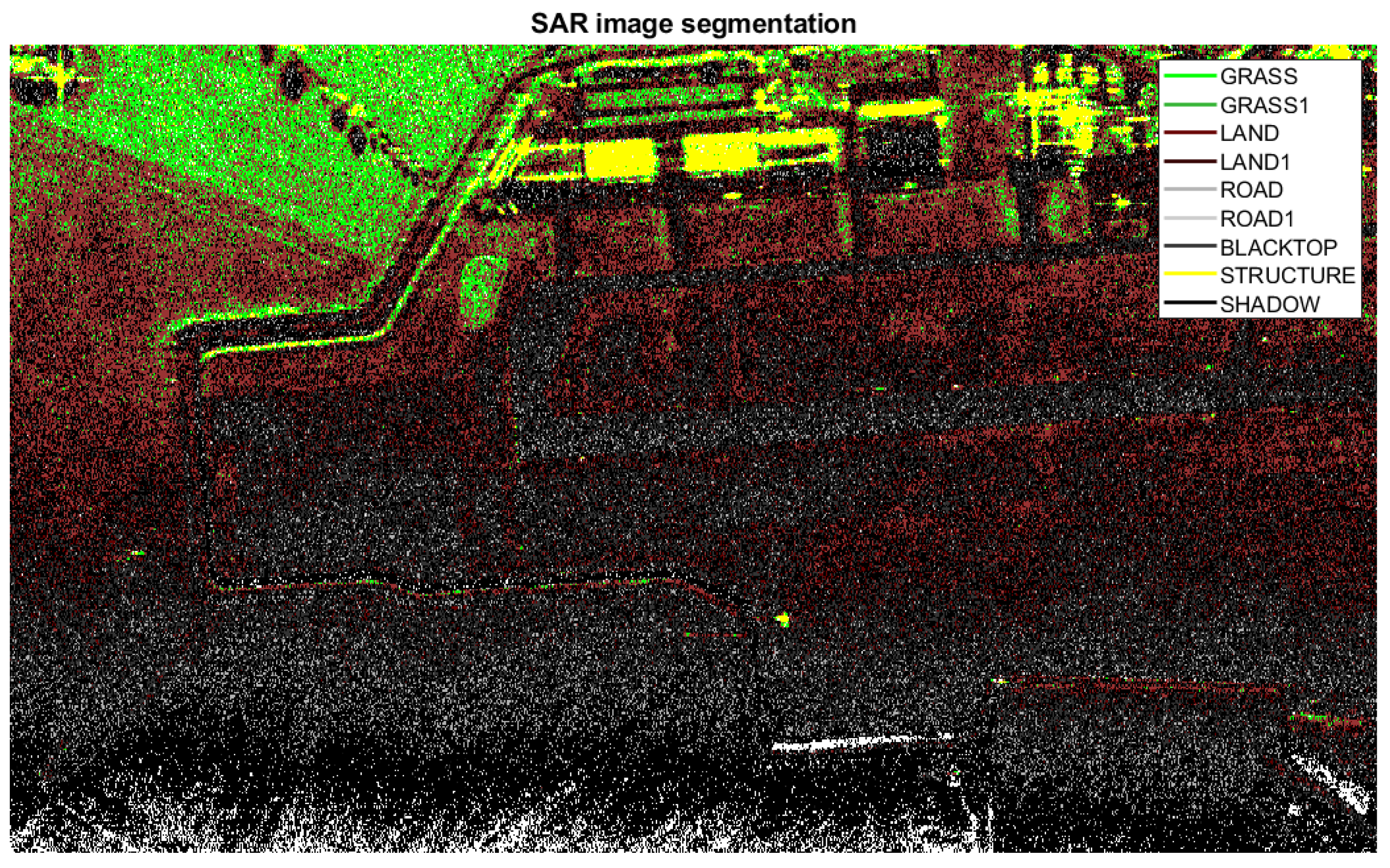
5.2.2. SAR Image Segmentation
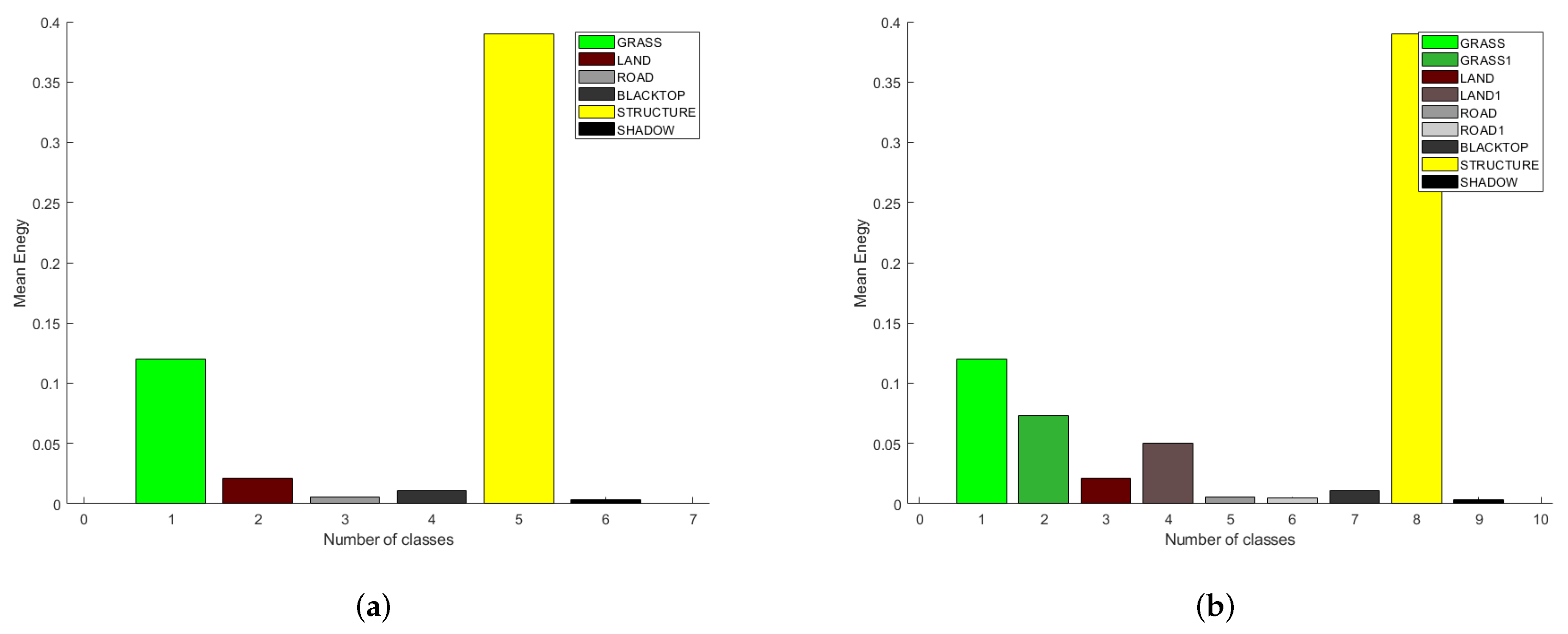
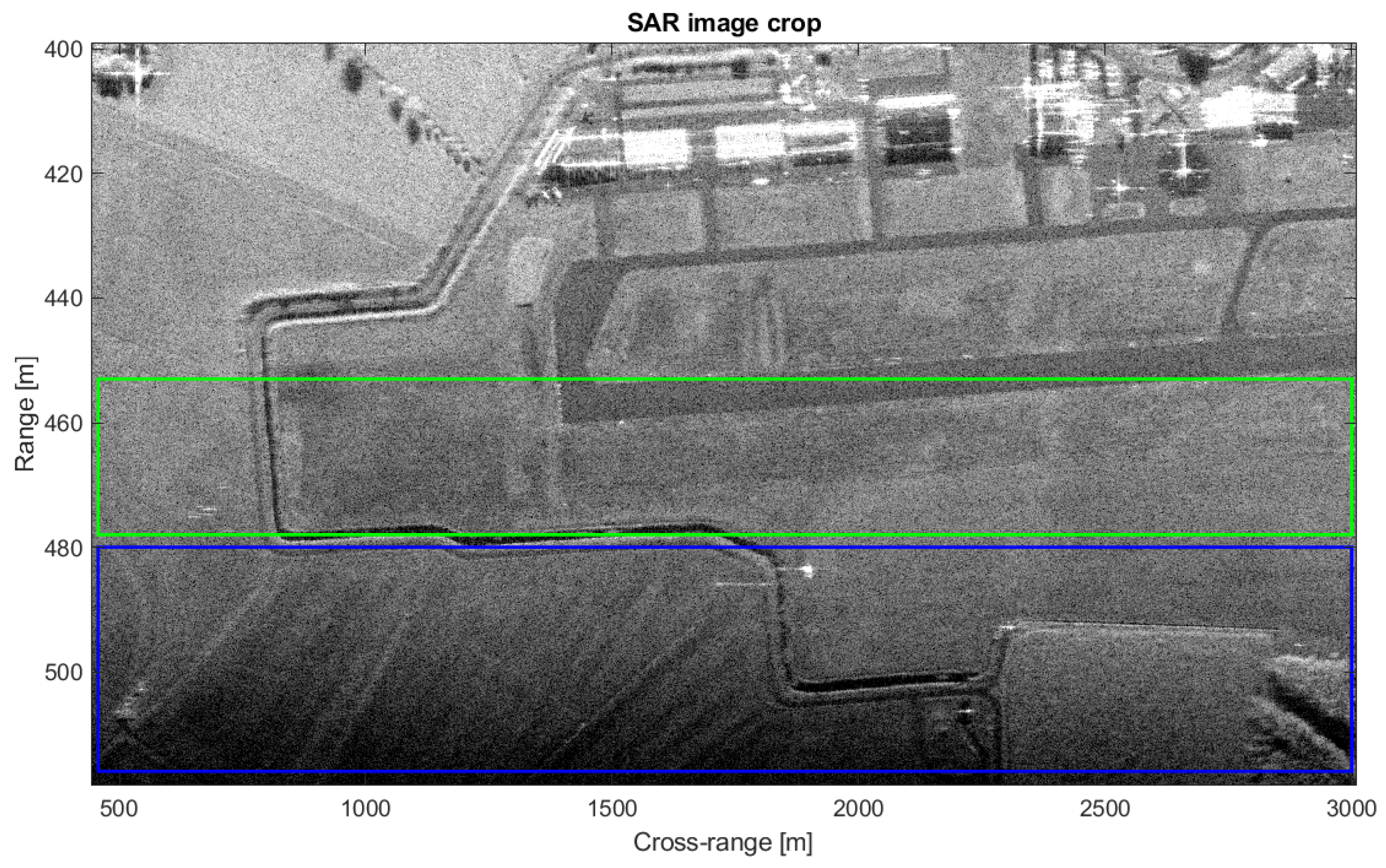
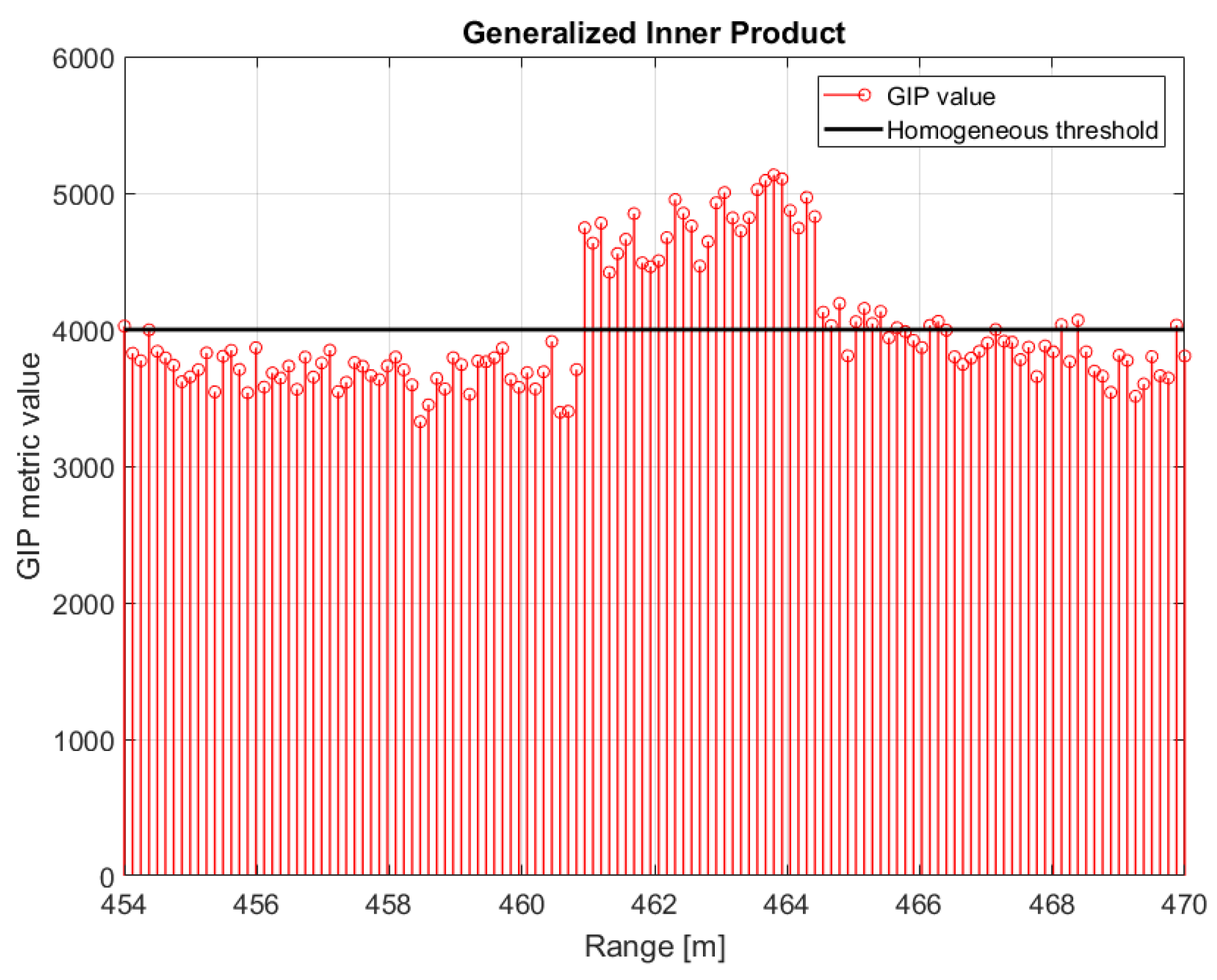
5.2.3. Training Data Selection
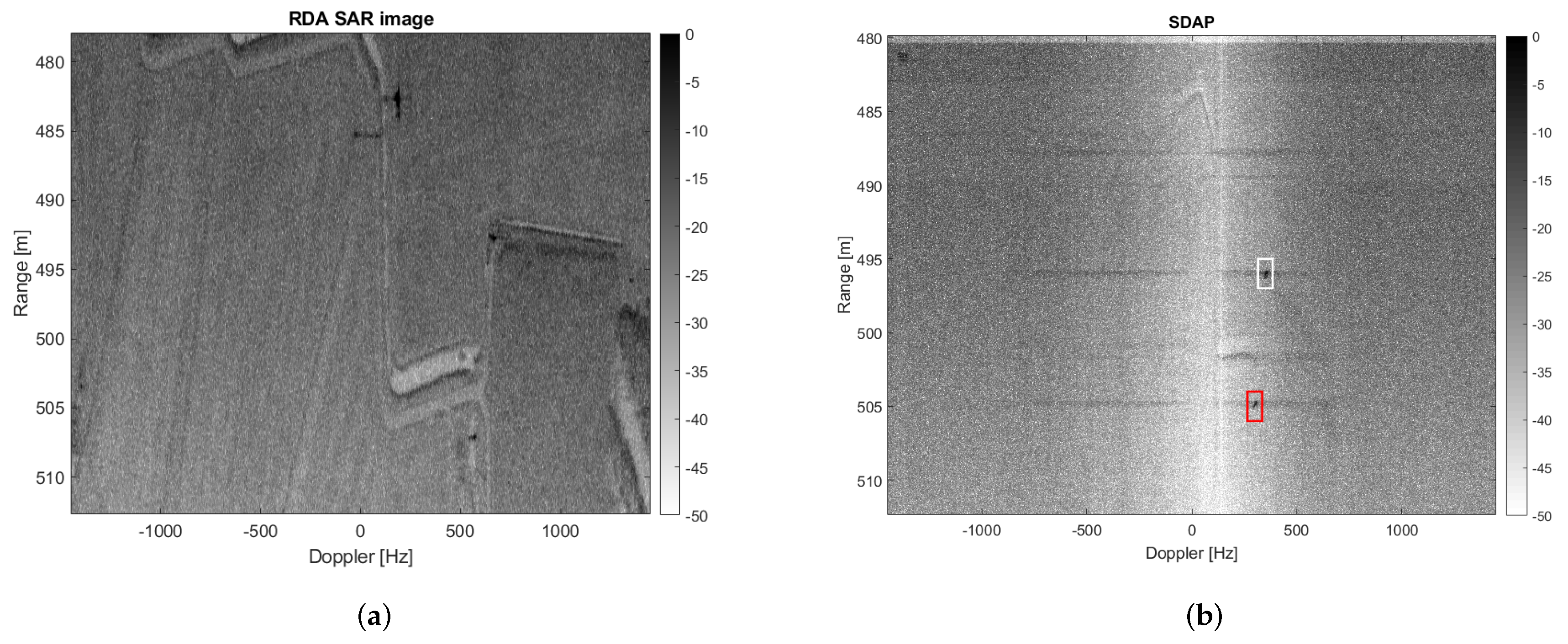
5.2.4. Clutter Suppression and Target Detection
5.3. Use Case—Cognitive SDAP-ISAR
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Symbols
| Additive noise | |
| Antenna azimuth aperture | |
| Array dimension | |
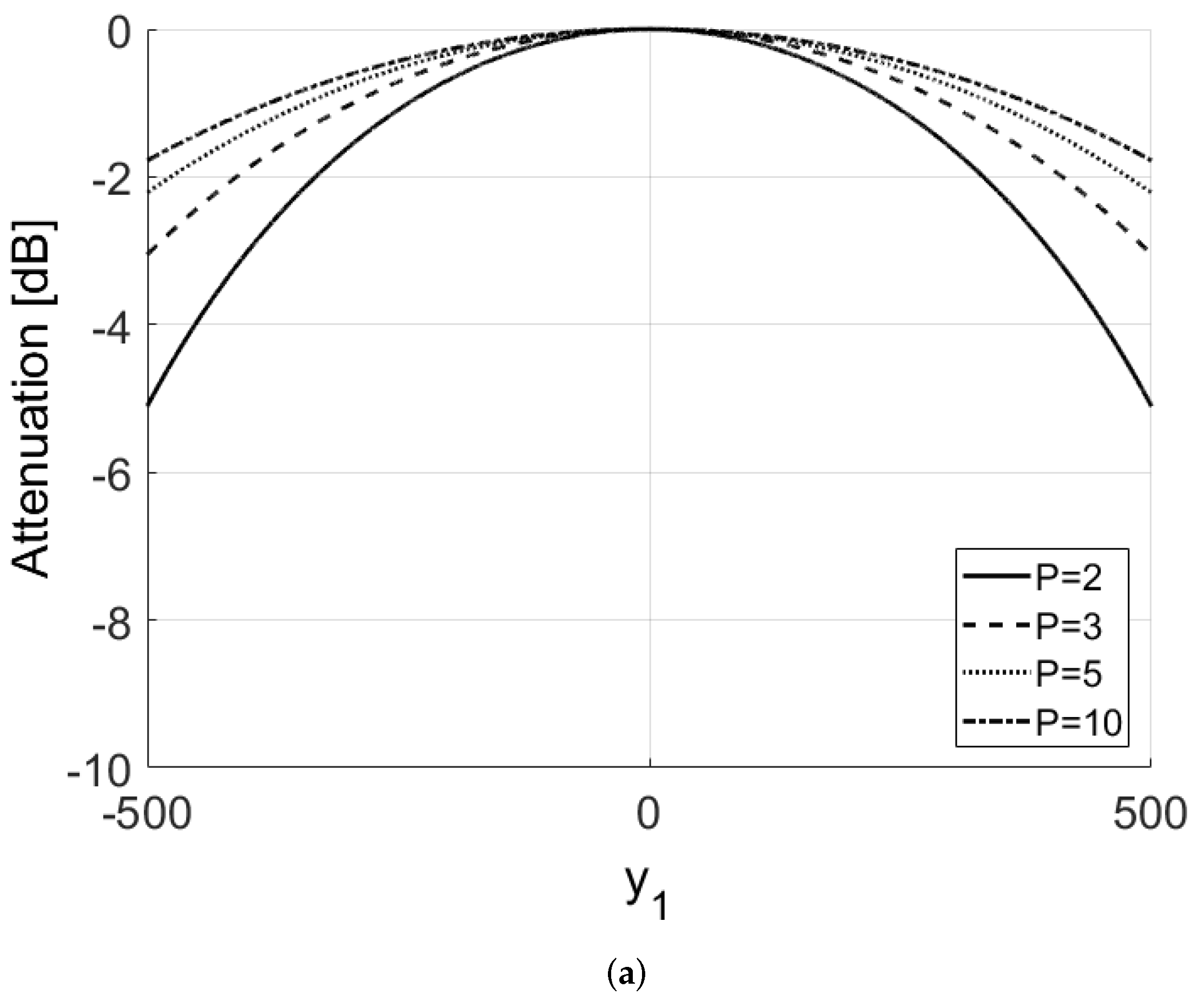
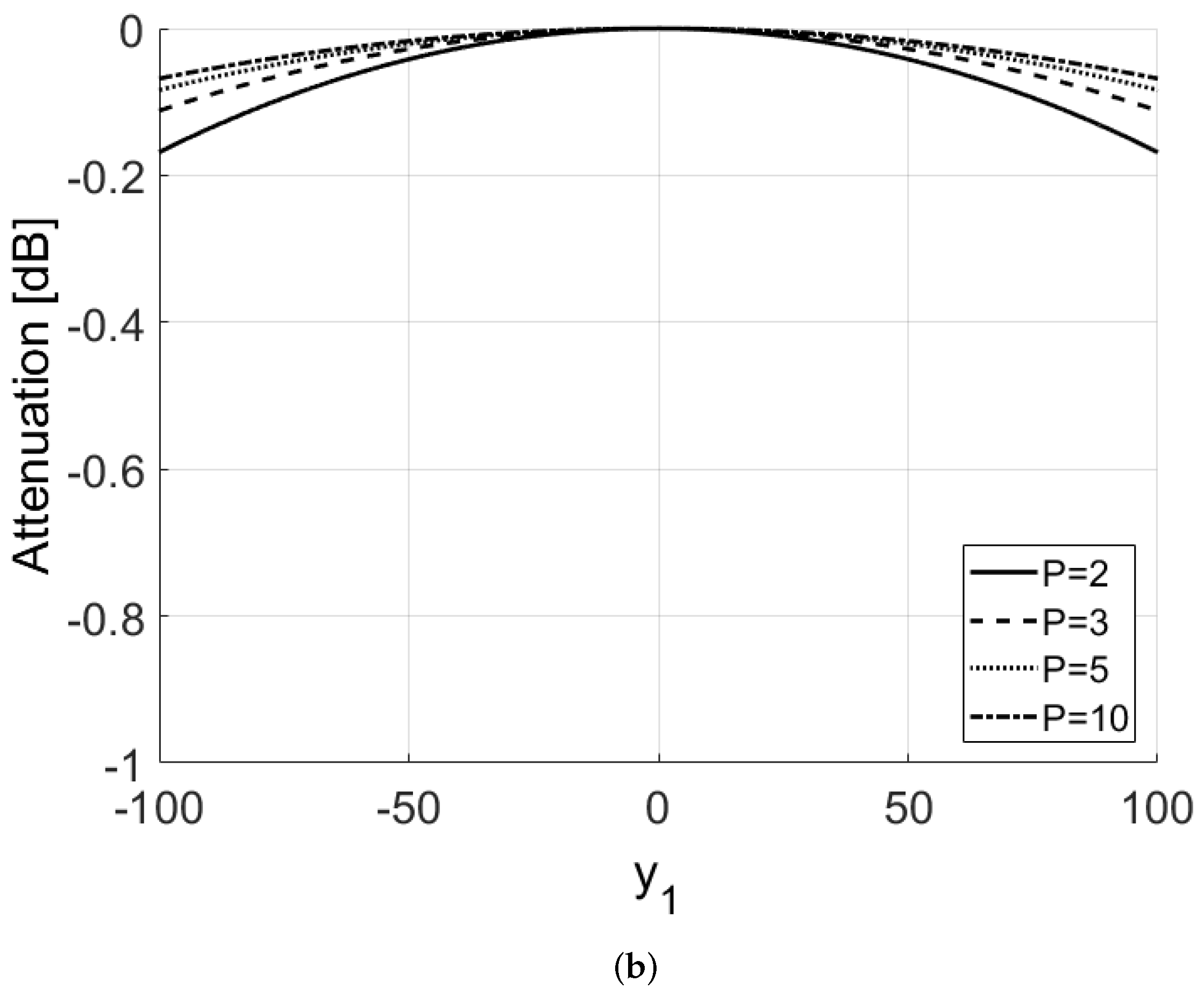
| Attenuation term | |
| Average operation | |
| Carrier frequency | |
| Clutter signal return | |
| Clutter spatial correlation coefficient | |
| Clutter spatial correlation coefficient | |
| Convolution along time delay dimension | ⊗ |
| Convolution along Doppler frequency dimension | |
| Cross-range image size | |
| Cross-range resolution | |
| Distance between radar platform and target reference point | |
| Doppler bandwidth | |
| Doppler frequency | |
| Effective rotation vector | |
| Equivalent baseline | |
| Interference cross-power spectral matrix | |
| Image contrast | |
| ISAR point spread function | |
| Multichannel range-Doppler image | |
| Number of array channels | P |
| Number of range cells | |
| Number of samples | |
| Numbers of unclassified pixels | |
| Numbers of classified pixels | |
| Observation time | |
| Phase of the received signal | |
| Platform Velocity | |
| Pulse Repetition interval | |
| Pulse Repetition Frequency |
| Radar wavelength | |
| Radial velocity | |
| Range resolution | |
| Received signal by the array element (p,q) | |
| Received signal after motion compensation | |
| Reference signal | |
| Reference vector | |
| Rotation matrix | |
| Scatter position | |
| Segmentation controlling function | |
| Signal vector | |
| Size of the illuminated swath along the range dimension | |
| Synthetic aperture | L |
| Speed of light in a vacuum | c |
| Signal bandwidth | B |
| Target reflectivity function | |
| Target rotational motion velocity vector | |
| Target signal return | |
| Unit vector along the radar Line of Sight | |
| Vector of target-free training data | |
| Weight vector | |
| Segmentation actuating function | |
| Training data selection controlling function | |
| Bayesian approach controlling function | |
| Training data selection actuating function | |
| Clutter suppression controlling function | |
| Clutter suppression actuating function | |
| Predefined clutter covariance matrix | |
| Doppler Null | |
| Doppler Null Bandwidth | |
| Frequency spectrum sensing |
References
- Carrara, W.; Goodman, R.; Majewski, R. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms; Artech House Signal Processing Library, Artech House: London, UK, 1995. [Google Scholar]
- Martorella, M.; Giusti, E.; Berizzi, F.; Bacci, A.; Dalle Mese, E. ISAR based techniques for refocusing non-cooperative targets in SAR images. IET Radar Sonar Navig. 2012, 6, 332–340. [Google Scholar] [CrossRef]
- Lazarov, A.D.; Minchev, C.N. SAR Imaging of a Moving Target. In Proceedings of the 2007 3rd International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, 14–16 June 2007; pp. 366–372. [Google Scholar] [CrossRef]
- D’Addio, E.; Bisceglie, M.D.; Bottalico, S. Detection of moving objects with airborne {SAR}. Signal Process. 1994, 36, 149–162. [Google Scholar] [CrossRef]
- Raney, R. Synthetic Aperture Imaging Radar and Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 1971, AES-7, 499–505. [Google Scholar] [CrossRef]
- White, R. Change detection in SAR imagery. Int. J. Remote Sens. 1991, 12, 339–360. [Google Scholar] [CrossRef]
- Rapp, J.; Saunders, C.; Tachella, J.; Murray-Bruce, J.; Altmann, Y.; Tourneret, J.Y.; McLaughlin, S.; Dawson, R.; Wong, F.; Goyal, V. Seeing around corners with edge-resolved transient imaging. Nat. Commun. 2020, 11. [Google Scholar] [CrossRef] [PubMed]
- Saunders, C.; Murray-Bruce, J.; Goyal, V.K. Computational periscopy with an ordinary digital camera. Nature 2019, 565, 472–475. [Google Scholar] [CrossRef] [PubMed]
- Dickey, F.R., Jr.; Labitt, M.; Staudaher, F. Development of airborne moving target radar for long range surveillance. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 959–972. [Google Scholar] [CrossRef]
- Skolnik, M. Radar Handbook, 3rd ed.; Electronics Electrical Engineering; The McGraw-Hill Companies, 2008; Available online: https://www.accessengineeringlibrary.com/content/book/9780071485470 (accessed on 30 March 2021).
- Pascazio, V.; Schirinzi, G.; Farina, A. Moving target detection by along-track interferometry. In Proceedings of the IGARSS 2001, Scanning the Present and Resolving the Future, IEEE 2001 International Geoscience and Remote Sensing Symposium, Sydney, Australia, 9–13 July 2001; Volume 7, pp. 3024–3026. [Google Scholar] [CrossRef]
- Gierull, C. Moving Target Detection by Along-Track SAR Interferometry; DREO Technical Report; The Defence Research and Development: Ottawa, ON, Canada, 2002. [CrossRef]
- Chapin, E.; Chen, C. Along-track interferometry for ground moving target indication. IEEE Aerosp. Electron. Syst. Mag. 2008, 23, 19–24. [Google Scholar] [CrossRef]
- Cohen, L. Time-frequency distributions—A review. Proc. IEEE 1989, 77, 941–981. [Google Scholar] [CrossRef]
- Barbarossa, S.; Farina, A. Space-time-frequency processing of synthetic aperture radar signals. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 341–358. [Google Scholar] [CrossRef]
- Lombardo, P. Estimation of target motion parameters from dual-channel SAR echoes via time-frequency analysis. In Proceedings of the 1997 IEEE National Radar Conference, Syracuse, NY, USA, 13–15 May 1997; pp. 13–18. [Google Scholar] [CrossRef]
- Klemm, R. Institution of Engineering and Technology. In Principles of Space-Time Adaptive Processing, 3rd ed.; IET Radar, Sonar, Navigation and Avionics Series; Institution of Engineering and Technology, 2006; Available online: https://cds.cern.ch/record/1621479 (accessed on 30 March 2021).
- Guerci, J. Space-Time Adaptive Processing for Radar, 2nd ed.; Artech House Radar Library, Artech House: London, UK, 2003. [Google Scholar]
- Ward, J. Space-Time Adaptive Processing for Airborne Radar; Massachusset Inst of Tech Lexinton Lincoln Lab.: Lexington, MA, USA, 1994. [Google Scholar]
- Ender, J. Space-time adaptive processing for synthetic aperture radar. In Proceedings of the IEE Colloquium on Space-Time Adaptive Processing, London, UK, 6 April 1998. [Google Scholar] [CrossRef]
- Ender, J.H.G. Space-time processing for multichannel synthetic aperture radar. Electron. Commun. Eng. J. 1999, 11, 29–38. [Google Scholar] [CrossRef]
- Rosenberg, L.; Trinkle, M.; Gray, D. Fast-time STAP Performance in pre and post Range Processing Adaption as applied to Multichannel SAR. In Proceedings of the 2006 International Radar Symposium (IRS), Krakow, Poland, 24–26 May 2006; pp. 1–4. [Google Scholar] [CrossRef]
- Rosenberg, L.; Gray, D. Robust interference suppression for multichannel SAR. In Proceedings of the Eighth International Symposium on Signal Processing and Its Applications, Sydney, NSW, Australia, 28–31 August 2005; Volume 2, pp. 883–886. [Google Scholar] [CrossRef]
- Rosenberg, L.; Gray, D. Anti-jamming techniques for multichannel SAR imaging. IEE Proc. Radar Sonar Navig. 2006, 153, 234–242. [Google Scholar] [CrossRef]
- Riedl, M.; Potter, L.C. Knowledge-Aided Bayesian Space-Time Adaptive Processing. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1850–1861. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, Y.D.; Amin, M.G.; Himed, B. Space-Time Adaptive Processing and Motion Parameter Estimation in Multistatic Passive Radar Using Sparse Bayesian Learning. IEEE Trans. Geosci. Remote Sens. 2016, 54, 944–957. [Google Scholar] [CrossRef]
- Blunt, S.D.; Metcalf, J.; Jakabosky, J.; Stiles, J.; Himed, B. Multi-Waveform Space-Time Adaptive Processing. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 385–404. [Google Scholar] [CrossRef]
- Song, C.; Wang, B.; Xiang, M.; Wang, Z.; Xu, W.; Sun, X. A Novel Post-Doppler Parametric Adaptive Matched Filter for Airborne Multichannel Radar. Remote Sens. 2020, 12, 4017. [Google Scholar] [CrossRef]
- Shen, S.; Tang, L.; Nie, X.; Bai, Y.; Zhang, X.; Li, P. Robust Space Time Adaptive Processing Methods for Synthetic Aperture Radar. Appl. Sci. 2020, 10, 3609. [Google Scholar] [CrossRef]
- Khan, M.B.; Hussain, A.; Anjum, U.; Babar Ali, C.; Yang, X. Adaptive Doppler Compensation for Mitigating Range Dependence in Forward-Looking Airborne Radar. Electronics 2020, 9, 1896. [Google Scholar] [CrossRef]
- Bacci, A.; Gray, D.; Martorella, M.; Berizzi, F. Joint STAP-ISAR for non-cooperative target imaging in strong clutter. In Proceedings of the 2013 IEEE Radar Conference (RadarCon13), Ottawa, ON, Canada, 29 April–3 May 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Bacci, A. Optimal Space Time Adaptive Processing for Multichannel Inverse Synthetic Aperture Radar Imaging. Ph.D. Thesis, University of Adelaide, Adelaide, Australia, 2014. [Google Scholar]
- Bacci, A.; Martorella, M.; Gray, D.; Berizzi, F. Space-Doppler adaptive processing for radar imaging of moving targets masked by ground clutter. IET Radar Sonar Navig. 2015, 9, 712–726. [Google Scholar] [CrossRef]
- Battisti, N.; Martorella, M. Intereferometric phase and target motion estimation for accurate 3D reflectivity reconstruction in ISAR systems. In Proceedings of the 2010 IEEE Radar Conference, Arlington, VA, USA, 10–14 May 2010; pp. 108–112. [Google Scholar] [CrossRef]
- Berizzi, F.; Martorella, M.; Giusti, E. Radar Imaging for Maritime Obseravtion; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Martorella, M.; Palmer, J.; Homer, J.; Littleton, B.; Longstaff, I. On Bistatic Inverse Synthetic Aperture Radar. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1125–1134. [Google Scholar] [CrossRef]
- Martorella, M.; Stagliano, D.; Salvetti, F.; Battisti, N. 3D interferometric ISAR imaging of noncooperative targets. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3102–3114. [Google Scholar] [CrossRef]
- Chen, V.; Martorella, M. Inverse Synthetic Aperture Radar Imaging: Principles, Algorithms and Applications; Institution of Engineering and Technology: London, UK, 2014. [Google Scholar]
- Perry, R.; DiPietro, R.; Fante, R. SAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 188–200. [Google Scholar] [CrossRef]
- Zhu, S.; Liao, G.; Qu, Y.; Zhou, Z.; Liu, X. Ground Moving Targets Imaging Algorithm for Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2011, 49, 462–477. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, R.; Xing, M.; Bao, Z. Approach for single channel SAR ground moving target imaging and motion parameter estimation. IET Radar Sonar Navig. 2007, 1, 59–66. [Google Scholar] [CrossRef]
- Werness, S.; Stuff, M.; Fienup, J. Two-dimensional imaging of moving targets in SAR data. In Proceedings of the 1990 Conference Record Twenty-Fourth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 5 October–7 November 1990; Volume 1, p. 16. [Google Scholar] [CrossRef]
- Gelli, S.; Bacci, A.; Martorella, M.; Berizzi, F. Clutter Suppression and High-Resolution Imaging of Noncooperative Ground Targets for Bistatic Airborne Radar. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 932–949. [Google Scholar] [CrossRef]
- Soumekh, M. Synthetic Aperture Radar Signal Processing with MATLAB Algorithms; Wiley-Interscience Publication, Wiley: New York, NY, USA, 1999. [Google Scholar]
- Rosenberg, L. Multichannel Synthetic Aperture Radar. Ph.D. Thesis, University of Adelaide, Adelaide, Australia, 2007. [Google Scholar]
- Martorella, M.; Berizzi, F.; Haywood, B. Contrast maximisation based technique for 2-D ISAR autofocusing. IEE Proc. Radar Sonar Navig. 2005, 152, 253–262. [Google Scholar] [CrossRef]
- Martorella, M.; Berizzi, F. Time windowing for highly focused ISAR image reconstruction. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 992–1007. [Google Scholar] [CrossRef]
- Martorella, M. Novel approach for ISAR image cross-range scaling. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 281–294. [Google Scholar] [CrossRef]
- Reed, I.S.; Mallett, J.D.; Brennan, L.E. Rapid Convergence Rate in Adaptive Arrays. IEEE Trans. Aerosp. Electron. Syst. 1974, AES-10, 853–863. [Google Scholar] [CrossRef]
- Bacci, A.; Gray, D.; Martorella, M.; Berizzi, F. Space-Doppler processing for multichannel ISAR imaging of non-cooperative targets embedded in strong clutter. In Proceedings of the 2013 International Conference on Radar (Radar), Adelaide, SA, Australia, 9–12 September 2013; pp. 43–47. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radar: A way of the future. IEEE Signal Process. Mag. 2006, 23, 30–40. [Google Scholar] [CrossRef]
- Guerci, J.R.; Baranoski, E.J. Knowledge-aided adaptive radar at DARPA: An overview. IEEE Signal Process. Mag. 2006, 23, 41–50. [Google Scholar] [CrossRef]
- Cumming, I.; Wong, F. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Number v. 1 in Artech House Remote Sensing Library; Artech House: London, UK, 2005. [Google Scholar]
- Fukuda, S.; Hirosawa, H. A wavelet-based texture feature set applied to classification of multifrequency polarimetric SAR images. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2282–2286. [Google Scholar] [CrossRef]
- Melvin, W.L.; Wicks, M.C. Improving practical space-time adaptive radar. In Proceedings of the 1997 IEEE National Radar Conference, Syracuse, NY, USA, 13–15 May 1997; pp. 48–53. [Google Scholar] [CrossRef]
- Bergin, J.S.; Teixeira, C.M.; Techau, P.M.; Guerci, J.R. Improved clutter mitigation performance using knowledge-aided space-time adaptive processing. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 997–1009. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Carrier frequency | 9.9 GHz |
| PRF | 2.9 kHz |
| TX Bandwidth | 600 MHz |
| ADC Sampling frequency | 25 MHz |
| Platform Velocity | 45 m/s |
| Incident Angle | |
| Antenna Beamwidth | , |
| Acquisition Time | 0.6 s |
| Platform Altitude | 996 m |
| Baseline | 0.08 m |
| Numbers of Rx channels | 4 |
| Target 1 | 7.95 m/s | ||
| Target 2 | 3.75 m/s | ||
| Target 3 | 3 m/s |
| Parameter | Value |
|---|---|
| Carrier frequency | 9.9 GHz |
| PRF | 5 kHz |
| TX Bandwidth | 120 MHz |
| ADC Sampling frequency | 25 MHz |
| Platform Velocity | 50 m/s |
| Incident Angle | |
| Antenna Beamwidth | , |
| Acquisition Time | 0.61 s |
| Platform Altitude | 1200 m |
| Numbers of Rx channels | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martorella, M.; Gelli, S.; Bacci, A. Ground Moving Target Imaging via SDAP-ISAR Processing: Review and New Trends. Sensors 2021, 21, 2391. https://doi.org/10.3390/s21072391
Martorella M, Gelli S, Bacci A. Ground Moving Target Imaging via SDAP-ISAR Processing: Review and New Trends. Sensors. 2021; 21(7):2391. https://doi.org/10.3390/s21072391
Chicago/Turabian StyleMartorella, Marco, Samuele Gelli, and Alessio Bacci. 2021. "Ground Moving Target Imaging via SDAP-ISAR Processing: Review and New Trends" Sensors 21, no. 7: 2391. https://doi.org/10.3390/s21072391
APA StyleMartorella, M., Gelli, S., & Bacci, A. (2021). Ground Moving Target Imaging via SDAP-ISAR Processing: Review and New Trends. Sensors, 21(7), 2391. https://doi.org/10.3390/s21072391