
Motion-Tolerant Non-Contact Heart-Rate Measurements from Radar Sensor Fusion



Abstract
1. Introduction
2. Materials and Methods
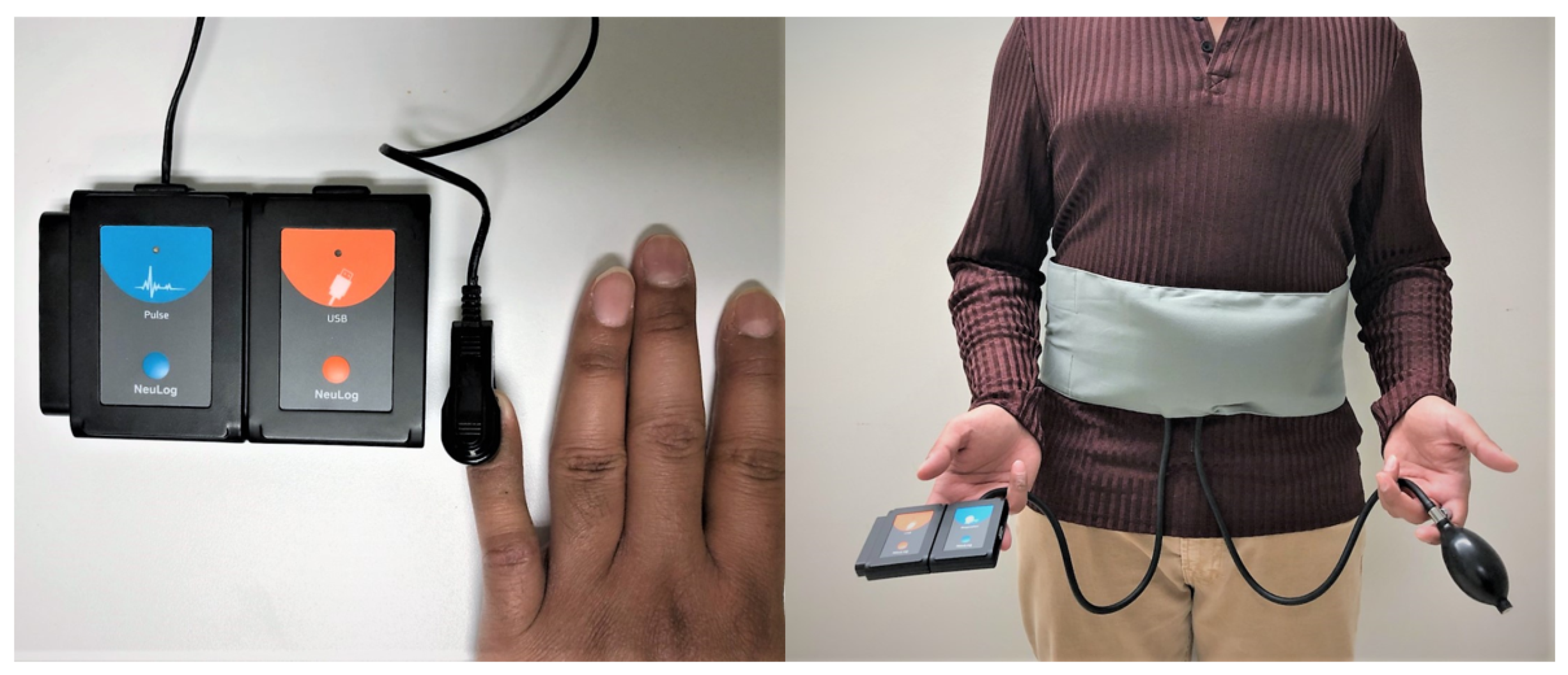
2.1. Experimental Setup and Design
2.2. Measurement Devices
2.3. Proposed Signal Processing
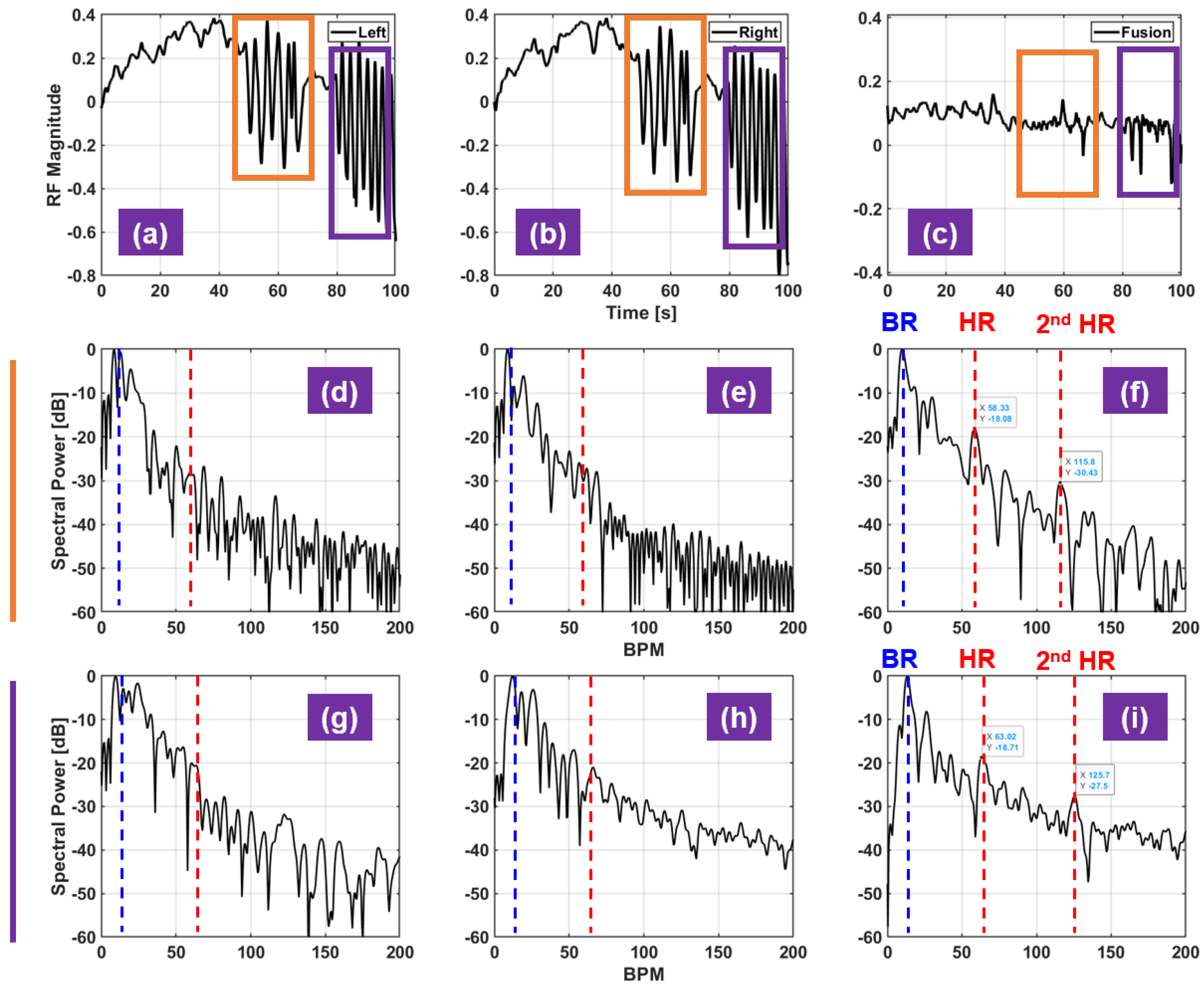
2.3.1. Active Motion Cancellation
Direct RF Signal Processing
Baseband Signal Processing
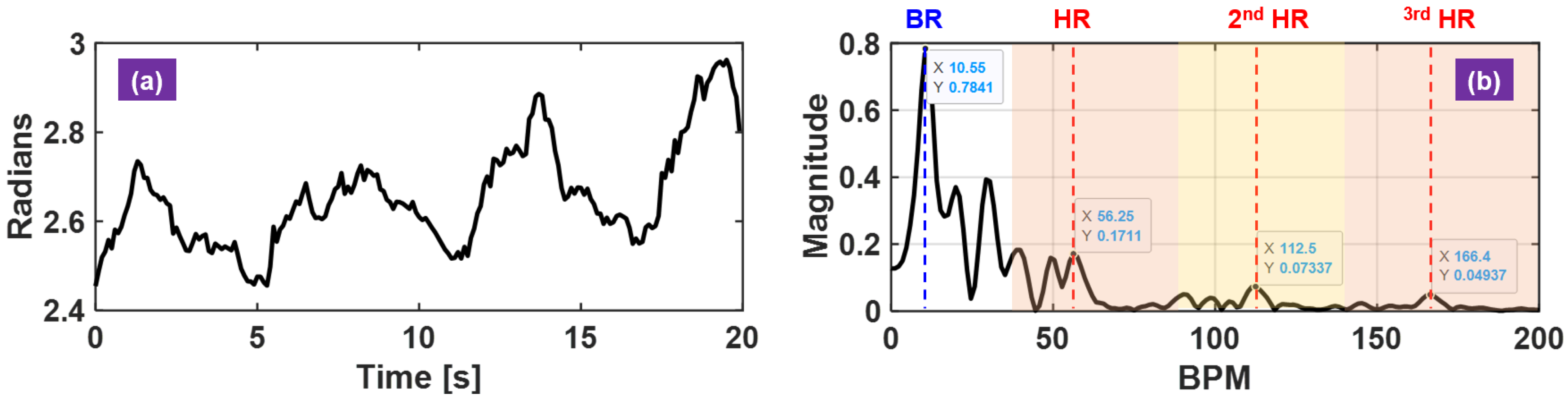
2.3.2. Analytical Spectral Analysis of Fused Sensor Signal
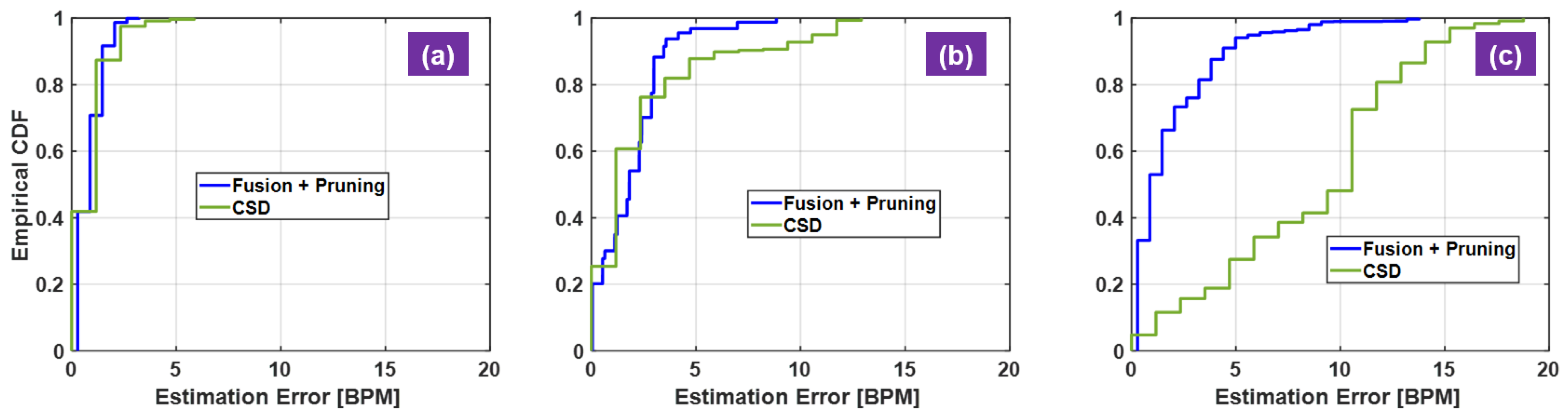
2.4. Spectral-Based Heart-Rate Calculation Algorithm
Spectral Peak Pruning Routine
| Algorithm 1: Spectral-Based Peak Selection for Heart-Rate Calculation |
 |
2.5. Evaluation Metrics
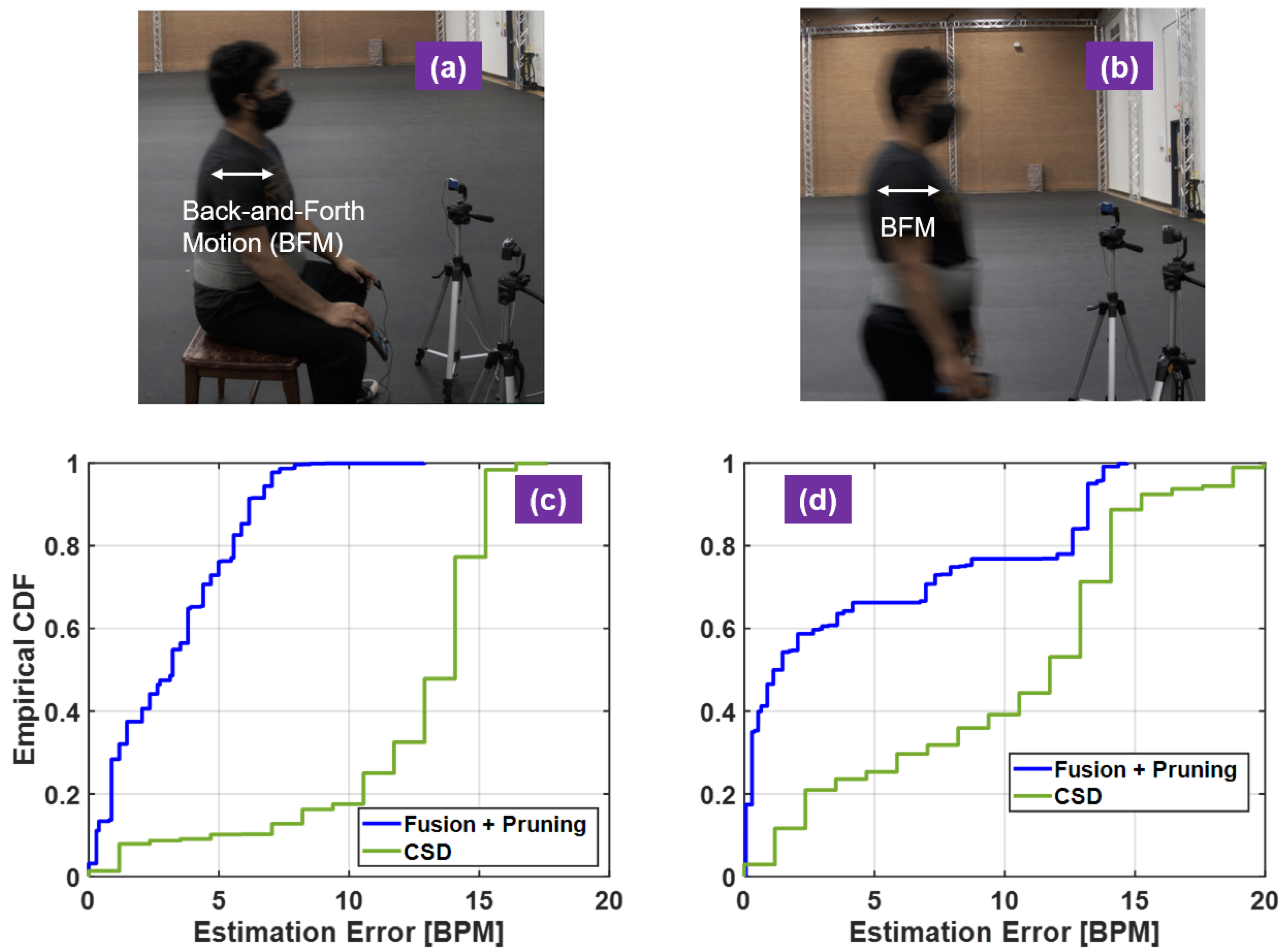
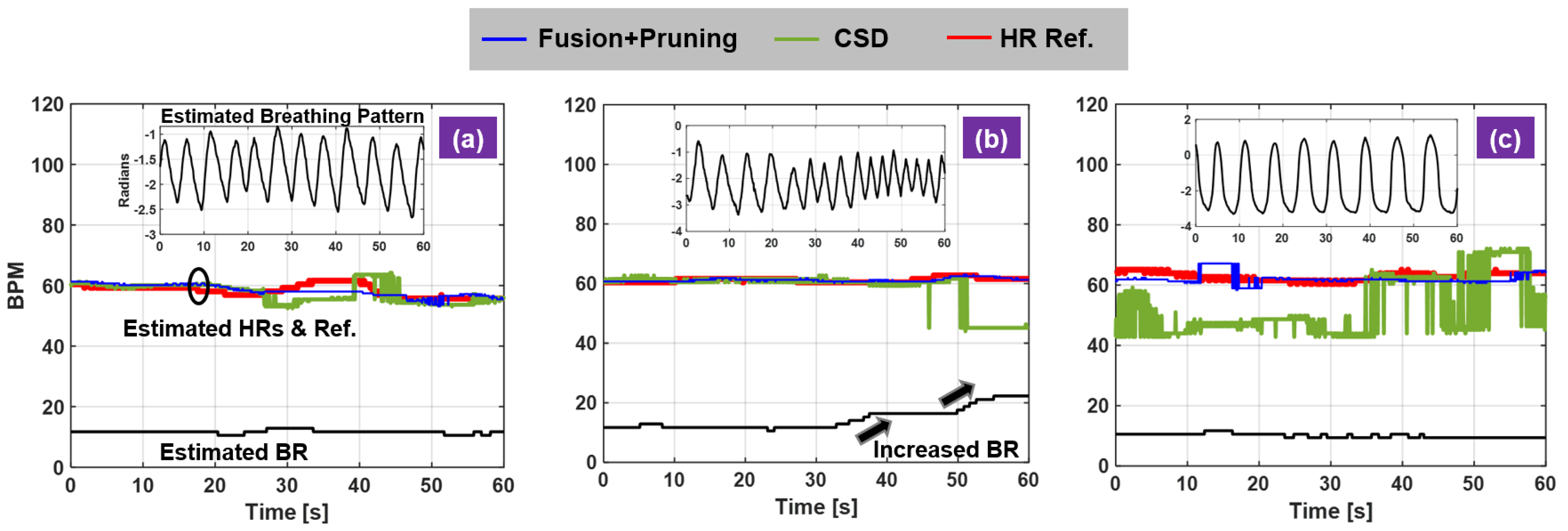
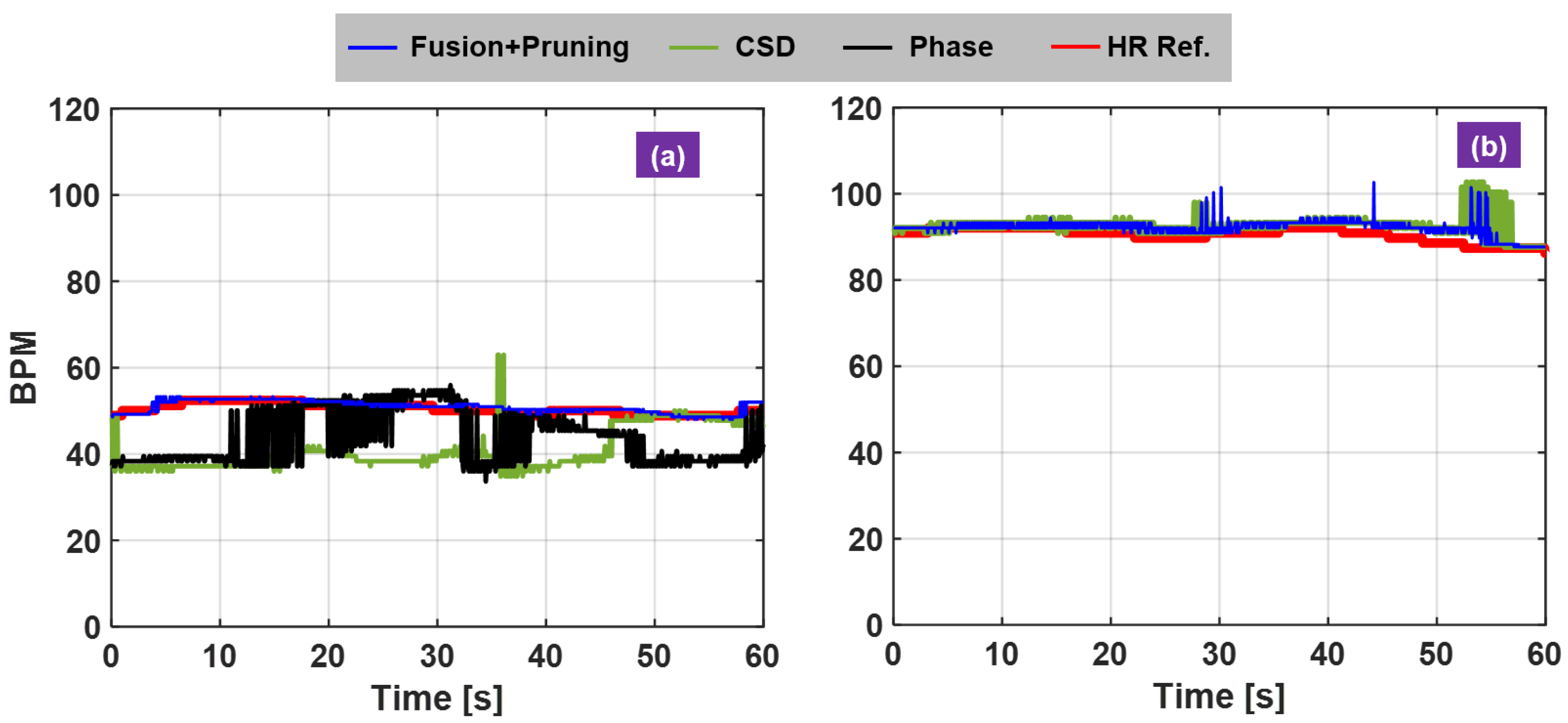
3. Motion-Tolerance Demonstrations
4. Novel Breathing and Heartbeat Dynamics Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| VSM | Vital-sign monitoring |
| RBM | Random body movement |
| HR | Heart-rate |
| UWB | Ultra-wideband |
| BR | Breathing rate |
| PPG | Photoplethysmography |
| GHz | Gigahertz |
| BFM | Back-and-forth motion |
| RF | Radio frequency |
| 2-D | 2-dimensional |
| BPM | Beats per minute |
| FT | Fourier transform |
| CDF | Cumulative distribution function |
| RMSE | Root mean squared error |
| STD | Standard deviation |
| CSD | Complex signal demodulation |
Appendix A. Derivation of in Equation (15)
References
- Lin, J.C. Noninvasive microwave measurement of respiration. Proc. IEEE 1975, 63, 1530. [Google Scholar] [CrossRef]
- Chen, K.M.; Misra, D.; Wang, H.; Chuang, H.R.; Postow, E. An X-band microwave life-detection system. IEEE Trans. Biomed. Eng. 1986, 7, 697–701. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.M.; Huang, Y.; Zhang, J.; Norman, A. Microwave life-detection systems for searching human subjects under earthquake rubble or behind barrier. IEEE Trans. Biomed. Eng. 2000, 47, 105–114. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Sun, L.; Tian, T.; Huang, Z.; Clancy, E. Real-time non-contact infant respiratory monitoring using UWB radar. In Proceedings of the 2015 IEEE 16th International Conference on Communication Technology (ICCT), Hangzhou, China, 18–20 October 2015; pp. 493–496. [Google Scholar]
- Rohman, B.P.; Andra, M.B.; Nishimoto, M. Toward a Compact Infant Monitoring System Using UWB Radar and Environmental Sensors. In Proceedings of the IEEE 1st Global Conference on Life Sciences and Technologies (LifeTech), Osaka, Japan, 12–14 March 2019; pp. 4–5. [Google Scholar]
- Turppa, E.; Kortelainen, J.M.; Antropov, O.; Kiuru, T. Vital Sign Monitoring Using FMCW Radar in Various Sleeping Scenarios. Sensors 2020, 20, 6505. [Google Scholar] [CrossRef] [PubMed]
- Rong, Y.; Chiriyath, A.R.; Dutta, A.; Bliss, D.W. Active Breathing Suppression for Improved Sleep Monitoring Heartbeat Detection Using UWB Radar. In Proceedings of the 2019 IEEE 8th International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), Le gosier, Guadeloupe, 15–18 December 2019; pp. 161–165. [Google Scholar]
- Diraco, G.; Leone, A.; Siciliano, P. A Radar-Based Smart Sensor for Unobtrusive Elderly Monitoring in Ambient Assisted Living Applications. Biosensors 2017, 7, 55. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Ma, Y.; Liang, F.; Zhang, Y.; Yu, X.; Li, Z.; An, Q.; Lv, H.; Wang, J. Non-contact vital signs monitoring of dog and cat using a UWB radar. Animals 2020, 10, 205. [Google Scholar] [CrossRef]
- Ndiaye, M.; Oyewobi, S.S.; Abu-Mahfouz, A.M.; Hancke, G.P.; Kurien, A.M.; Djouani, K. IoT in the wake of COVID-19: A survey on contributions, challenges and evolution. IEEE Access 2020, 8, 186821–186839. [Google Scholar] [CrossRef]
- Wang, W.; Den Brinker, A.C.; De Haan, G. Single-element remote-ppg. IEEE Trans. Biomed. Eng. 2018, 66, 2032–2043. [Google Scholar] [CrossRef] [PubMed]
- Verkruysse, W.; Svaasand, L.O.; Nelson, J.S. Remote plethysmographic imaging using ambient light. Opt. Express 2008, 16, 21434–21445. [Google Scholar] [CrossRef] [PubMed]
- Fallow, B.A.; Tarumi, T.; Tanaka, H. Influence of skin type and wavelength on light wave reflectance. J. Clin. Monit. Comput. 2013, 27, 313–317. [Google Scholar] [CrossRef] [PubMed]
- Feng, L.; Po, L.M.; Xu, X.; Li, Y.; Ma, R. Motion-resistant remote imaging photoplethysmography based on the optical properties of skin. IEEE Trans. Circuits Syst. Video Technol. 2014, 25, 879–891. [Google Scholar] [CrossRef]
- Butler, M.; Crowe, J.A.; Hayes-Gill, B.R.; Rodmell, P.I. Motion limitations of non-contact photoplethysmography due to the optical and topological properties of skin. Physiol. Meas. 2016, 37, N27. [Google Scholar] [CrossRef] [PubMed]
- Rong, Y.; Srinivas, S.; Chu, H.; Yu, H.; Liu, K.; Bliss, D.W. Respiration and Cardiac Activity Sensing Using 3-D Camera. In Proceedings of the 2020 54th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 1–4 November 2020. in press. [Google Scholar]
- Moco, A.V.; Stuijk, S.; de Haan, G. New insights into the origin of remote PPG signals in visible light and infrared. Sci Rep. 2018, 8, 8501. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Stuijk, S.; De Haan, G. Exploiting spatial redundancy of image sensor for motion robust rPPG. IEEE Trans. Biomed. Eng. 2014, 62, 415–425. [Google Scholar] [CrossRef]
- Wang, W.; Stuijk, S.; De Haan, G. A novel algorithm for remote photoplethysmography: Spatial subspace rotation. IEEE Trans. Biomed. Eng. 2015, 63, 1974–1984. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; den Brinker, A.C.; Stuijk, S.; De Haan, G. Algorithmic principles of remote PPG. IEEE Trans. Biomed. Eng. 2016, 64, 1479–1491. [Google Scholar] [CrossRef]
- Magdalena Nowara, E.; Marks, T.K.; Mansour, H.; Veeraraghavan, A. SparsePPG: Towards driver monitoring using camera-based vital signs estimation in near-infrared. In Proceedings of the IEEE Conference on Computer Vision and pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 1272–1281. [Google Scholar]
- Yang, Z.; Pathak, P.H.; Zeng, Y.; Liran, X.; Mohapatra, P. Monitoring vital signs using millimeter wave. In Proceedings of the 17th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Paderborn, Germany, 5–8 July 2016; pp. 211–220. [Google Scholar]
- Ahmad, A.; Roh, J.C.; Wang, D.; Dubey, A. Vital signs monitoring of multiple people using a FMCW millimeter-wave sensor. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1450–1455. [Google Scholar]
- Rong, Y.; Theofanopoulos, P.C.; Trichopoulos, G.C.; Bliss, D.W. Cardiac Sensing Exploiting an Ultra-Wideband Terahertz Sensing System. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 1002–1006. [Google Scholar]
- Ren, L.; Koo, Y.S.; Wang, H.; Wang, Y.; Liu, Q.; Fathy, A.E. Noncontact multiple heartbeats detection and subject localization using UWB impulse Doppler radar. IEEE Microw. Wirel. Components Lett. 2015, 25, 690–692. [Google Scholar] [CrossRef]
- Rong, Y.; Bliss, D.W. Harmonics-based multiple heartbeat detection at equal distance using uwb impulse radar. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1101–1105. [Google Scholar]
- Rong, Y.; Bliss, D.W. Smart Homes: See Multiple Heartbeats Through Wall Using Wireless Signals. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar]
- Yan, J.; Hong, H.; Zhao, H.; Li, Y.; Gu, C.; Zhu, X. Through-wall multiple targets vital signs tracking based on VMD algorithm. Sensors 2016, 16, 1293. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Lin, J. Random body movement cancellation in Doppler radar vital sign detection. IEEE Trans. Microw. Theory Tech. 2008, 56, 3143–3152. [Google Scholar]
- Yu, X.; Li, C.; Lin, J. Two-dimensional noncontact vital sign detection using Doppler radar array approach. In Proceedings of the 2011 IEEE MTT-S International Microwave Symposium, Baltimore, MD, USA, 5–10 June 2011; pp. 1–4. [Google Scholar]
- Tang, M.C.; Wang, F.K.; Horng, T.S. Single self-injection-locked radar with two antennas for monitoring vital signs with large body movement cancellation. IEEE Trans. Microw. Theory Tech. 2017, 65, 5324–5333. [Google Scholar] [CrossRef]
- Singh, A.; Lubecke, V.M. Respiratory monitoring and clutter rejection using a CW Doppler radar with passive RF tags. IEEE Sens. J. 2011, 12, 558–565. [Google Scholar] [CrossRef]
- Gu, C.; Wang, G.; Li, Y.; Inoue, T.; Li, C. A hybrid radar-camera sensing system with phase compensation for random body movement cancellation in Doppler vital sign detection. IEEE Trans. Microw. Theory Tech. 2013, 61, 4678–4688. [Google Scholar] [CrossRef]
- Zhu, F.; Wang, K.; Wu, K. A fundamental-and-harmonic dual-frequency doppler radar system for vital signs detection enabling radar movement self-cancellation. IEEE Trans. Microw. Theory Tech. 2018, 66, 5106–5118. [Google Scholar] [CrossRef]
- Rong, Y.; Bliss, D.W. Remote Sensing for Vital Information Based on Spectral-Domain Harmonic Signatures. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3454–3465. [Google Scholar] [CrossRef]
- Andersen, N.; Granhaug, K.; Michaelsen, J.A.; Bagga, S.; Hjortland, H.A.; Knutsen, M.R.; Lande, T.S.; Wisland, D.T. A 118-mW pulse-based radar SoC in 55-nm CMOS for non-contact human vital signs detection. IEEE J. Solid State Circuits 2017, 52, 3421–3433. [Google Scholar] [CrossRef]
- Rong, Y.; Bliss, D.W. Direct RF signal processing for heart-rate monitoring using UWB impulse radar. In Proceedings of the 2018 52th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 1–4 November 2018. [Google Scholar]
- Kilbas, A.A.; Sebastian, N. Generalized fractional integration of Bessel function of the first kind. Integral Transform. Spec. Funct. 2008, 19, 869–883. [Google Scholar] [CrossRef]
- Lazaro, A.; Girbau, D.; Villarino, R. Analysis of vital signs monitoring using an IR-UWB radar. Prog. Electromagn. Res. 2010, 100, 265–284. [Google Scholar] [CrossRef]
- Li, C.; Lin, J. Complex signal demodulation and random body movement cancellation techniques for non-contact vital sign detection. In Proceedings of the 2008 IEEE MTT-S International Microwave Symposium Digest, Atlanta, GA, USA, 15–20 June 2008; pp. 567–570. [Google Scholar]
- Ren, L.; Wang, H.; Naishadham, K.; Kilic, O.; Fathy, A.E. Phase-based methods for heart rate detection using UWB impulse Doppler radar. IEEE Trans. Microw. Theory Tech. 2016, 64, 3319–3331. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject 1 | Subject 2 | Subject 3 | ||||
|---|---|---|---|---|---|---|
| Algorithms | Proposed (RMSE, STD) | CSD | Proposed | CSD | Proposed | CSD |
| Stable Seating | 1.05, 0.59 | 1.27, 0.92 | 1.38, 0.90 | 1.25, 0.88 | 1.55, 1.03 | 2.34, 1.03 |
| Free-Style Seating | 2.49, 1.60 | 3.98, 3.13 | 2.66, 1.80 | 4.59, 3.71 | 2.72, 2.02 | 3.68, 3.55 |
| Standing | 2.90, 2.20 | 9.71, 4.53 | 2.27, 1.80 | 10.30, 4.44 | 3.23, 1.98 | 9.08, 4.62 |
| Seating + BFMs | 3.89, 2.26 | 12.70, 4.72 | 4.16, 2.51 | 13.44, 4.56 | 3.74, 3.45 | 8.21, 5.02 |
| Standing + BFMs | 6.88, 5.26 | 11.25, 5.39 | 8.22, 4.98 | 15.21, 6.11 | 7.55, 6.22 | 13.46, 5.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rong, Y.; Dutta, A.; Chiriyath, A.; Bliss, D.W. Motion-Tolerant Non-Contact Heart-Rate Measurements from Radar Sensor Fusion. Sensors 2021, 21, 1774. https://doi.org/10.3390/s21051774
Rong Y, Dutta A, Chiriyath A, Bliss DW. Motion-Tolerant Non-Contact Heart-Rate Measurements from Radar Sensor Fusion. Sensors. 2021; 21(5):1774. https://doi.org/10.3390/s21051774
Chicago/Turabian StyleRong, Yu, Arindam Dutta, Alex Chiriyath, and Daniel W. Bliss. 2021. "Motion-Tolerant Non-Contact Heart-Rate Measurements from Radar Sensor Fusion" Sensors 21, no. 5: 1774. https://doi.org/10.3390/s21051774
APA StyleRong, Y., Dutta, A., Chiriyath, A., & Bliss, D. W. (2021). Motion-Tolerant Non-Contact Heart-Rate Measurements from Radar Sensor Fusion. Sensors, 21(5), 1774. https://doi.org/10.3390/s21051774