
End-to-End Deep Graph Convolutional Neural Network Approach for Intentional Islanding in Power Systems Considering Load-Generation Balance

 , ,
, ,  ,
, 
Abstract
1. Introduction
1.1. Intentional Islanding
1.2. Graph Neural Networks
- The proposed method is the first to incorporate an end-to-end deep learning solution for the intentional islanding problem. It incorporates four loss functions in total.
- The load-generation imbalance is minimised at each island using a deep learning loss formulation, enhancing the stability of the power system after the islanding process.
- A loss function is defined to determine the cluster for each bus in the system.
- A loss function is also defined to ensure the coherency of generators in the formed islands and avoid loss of power supply.
- An additional loss function is defined to balance the number of nodes in each partition.
2. Related Work
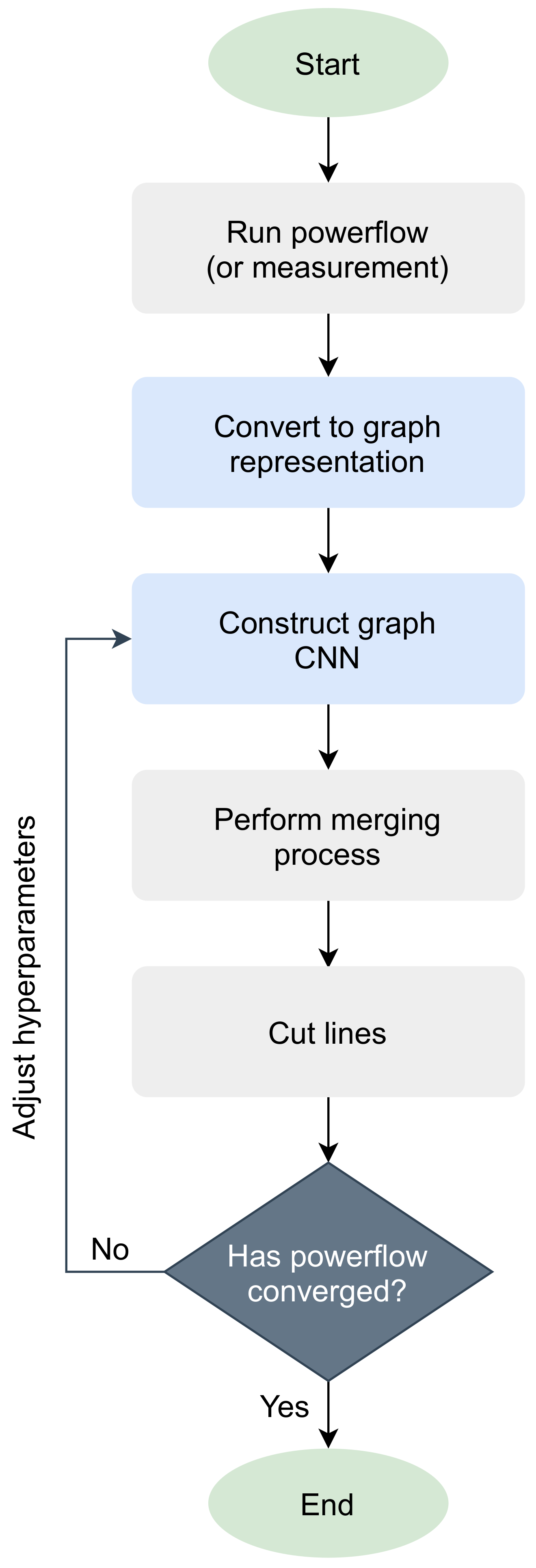
3. Deep Learning Based Method for Intentional Islanding
3.1. Graph Partition
3.1.1. GAP
3.1.2. Min-Cut
3.2. Islanding Using Deep Learning
3.3. Coarse-Fine Adjustment
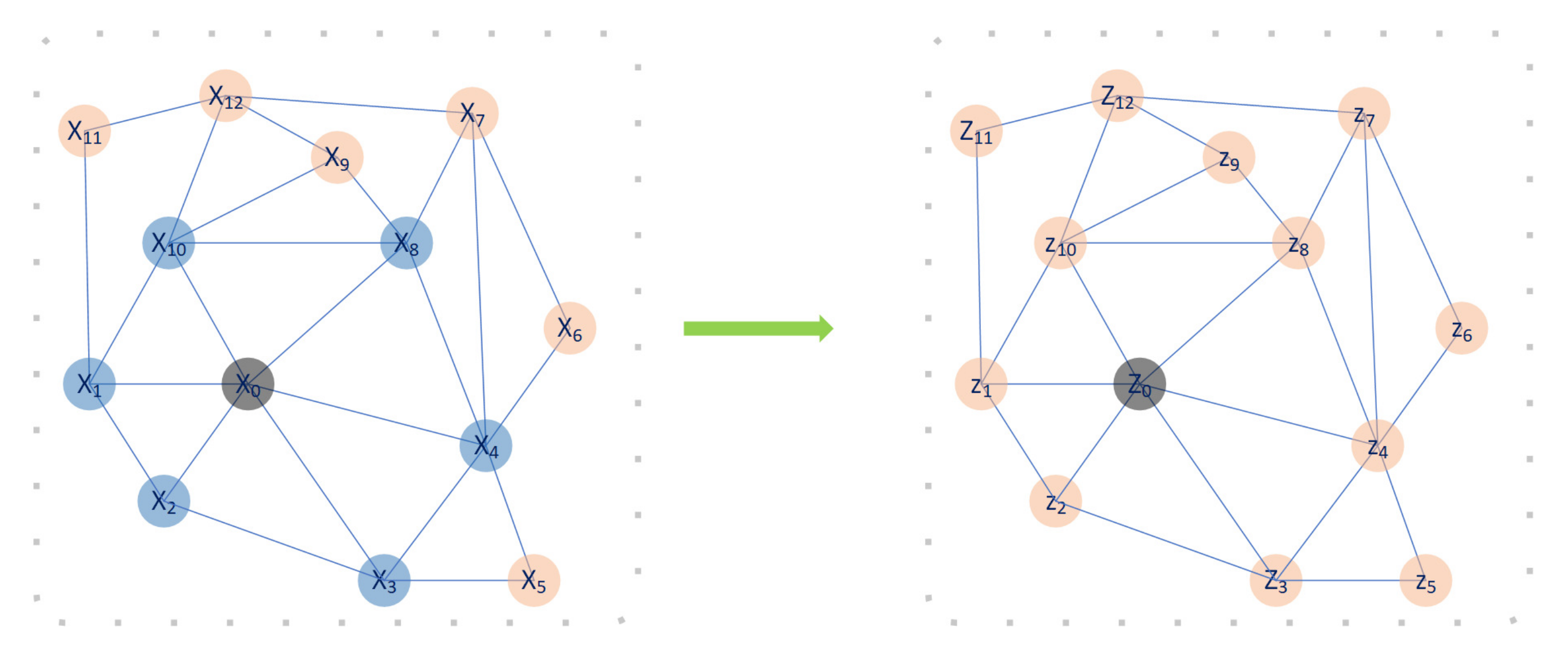
3.4. Graph Representation of the Power System
4. Evaluation Experiments
4.1. Model Implementation
4.2. Simulation Results
4.3. Ablation Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CNN | Convolutional neural network |
| GAP | Generalisable Approximate Partitioning |
| GNN | Graph neural network |
| MILP | Mixed-integer linear programming |
| ML | Machine learning |
References
- Sun, K.; Zheng, D.Z.; Lu, Q. Splitting strategies for islanding operation of large-scale power systems using OBDD-based methods. IEEE Trans. Power Syst. 2003, 18, 912–923. [Google Scholar] [CrossRef]
- Trodden, P.A.; Bukhsh, W.A.; Grothey, A.; McKinnon, K.I.M. Optimization-based Islanding of Power Networks using Piecewise Linear AC Power Flow. IEEE Trans. Power Syst. 2013, 29, 1212–1220. [Google Scholar] [CrossRef]
- Alegria, E.; Brown, T.; Minear, E.; Lasseter, R.H. CERTS Microgrid Demonstration With Large-Scale Energy Storage and Renewable Generation. IEEE Trans. Smart Grid 2014, 5, 937–943. [Google Scholar] [CrossRef]
- Wang, L.; Wu, J.; Yuan, R.; Zhang, D.; Liu, J.; Jiang, S.; Zhang, Y.; Li, M. Dynamic Adaptive Cross-Chain Trading Mode for Multi-Microgrid Joint Operation. Sensors 2020, 20, 6096. [Google Scholar] [CrossRef]
- Liu, S.; Hou, Y.; Liu, C.; Podmore, R. The Healing Touch: Tools and Challenges for Smart Grid Restoration. IEEE Power Energy Mag. 2014, 12, 54–63. [Google Scholar] [CrossRef]
- Adibi, M.M.; Kafka, R.J.; Maram, S.; Mili, L.M. On Power System Controlled Separation. IEEE Trans. Power Syst. 2006, 21, 1894–1902. [Google Scholar] [CrossRef]
- Xu, G.; Vittal, V. Slow Coherency Based Cutset Determination Algorithm for Large Power Systems. IEEE Trans. Power Syst. 2010, 25, 877–884. [Google Scholar] [CrossRef]
- Fisher, E.B.; O’Neill, R.P.; Ferris, M.C. Optimal Transmission Switching. IEEE Trans. Power Syst. 2008, 23, 1346–1355. [Google Scholar] [CrossRef]
- Khodaei, A.; Shahidehpour, M. Security-constrained transmission switching with voltage constraints. Int. J. Electr. Power Energy Syst. 2012, 35, 74–82. [Google Scholar] [CrossRef]
- Kyriacou, A.; Demetriou, P.; Panayiotou, C.; Kyriakides, E. Controlled Islanding Solution for Large-Scale Power Systems. IEEE Trans. Power Syst. 2018, 33, 1591–1602. [Google Scholar] [CrossRef]
- Trodden, P.A.; Bukhsh, W.A.; Grothey, A.; McKinnon, K. MILP formulation for controlled islanding of power networks. Int. J. Electr. Power Energy Syst. 2013, 45, 501–508. [Google Scholar] [CrossRef]
- Basumallik, S.; Eftekharnejad, S. Dynamic Islanding in Power Systems Based on Real-Time Operating Conditions. In Proceedings of the 2019 North American Power Symposium (NAPS), Wichita, KS, USA, 13–15 October 2019; pp. 1–6. [Google Scholar]
- Peiravi, A.; Ildarabadi, R. A Fast Algorithm for Intentional Islanding of Power Systems Using the Multilevel Kernel k-Means Approach. J. Appl. Sci. 2009, 9, 2247–2255. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet Classification with Deep Convolutional Neural Networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2016, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Balcilar, M.; Renton, G.; Heroux, P.; Gauzere, B.; Adam, S.; Honeine, P. Bridging the Gap Between Spectral and Spatial Domains in Graph Neural Networks. arXiv 2020, arXiv:2003.11702. [Google Scholar]
- Bruna, J.; Zaremba, W.; Szlam, A.; LeCun, Y. Spectral Networks and Locally Connected Networks on Graphs. In Proceedings of the 2nd International Conference on Learning Representations, ICLR 2014, Banff, AB, Canada, 14–16 April 2014. [Google Scholar]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional Neural Networks on Graphs with Fast Localized Spectral Filtering. In Proceedings of the Advances in Neural Information Processing Systems 29: Annual Conference on Neural Information Processing Systems 2016, Barcelona, Spain, 5–10 December 2016; pp. 3837–3845. [Google Scholar]
- Znidi, F.; Davarikia, H.; Iqbal, K.; Barati, M. Multi-Layer Spectral Clustering Approach to Intentional Islanding In Bulk Power Systems. J. Mod. Power Syst. Clean Energy 2019, 7, 1044–1055. [Google Scholar] [CrossRef]
- Dabbaghjamanesh, M.; Wang, B.; Kavousi-Fard, A.; Mehraeen, S.; Hatziargyriou, N.D.; Trakas, D.N.; Ferdowsi, F. A Novel Two-Stage Multi-Layer Constrained Spectral Clustering Strategy for Intentional Islanding of Power Grids. IEEE Trans. Power Deliv. 2020, 35, 560–570. [Google Scholar] [CrossRef]
- Esmaeilian, A.; Kezunovic, M. Prevention of Power Grid Blackouts Using Intentional Islanding Scheme. IEEE Trans. Ind. Appl. 2017, 53, 622–629. [Google Scholar] [CrossRef]
- Quirós-Tortós, J.; Sánchez-García, R.; Brodzki, J.; Bialek, J.; Terzija, V. Constrained spectral clustering-based methodology for intentional controlled islanding of large-scale power systems. IET Gener. Transm. Distrib. 2015, 9, 31–42. [Google Scholar] [CrossRef]
- Ding, L.; Gonzalez-Longatt, F.M.; Wall, P.; Terzija, V. Two-Step Spectral Clustering Controlled Islanding Algorithm. IEEE Trans. Power Syst. 2013, 28, 75–84. [Google Scholar] [CrossRef]
- Ding, T.; Sun, K.; Huang, C.; Bie, Z.; Li, F. Mixed-Integer Linear Programming-Based Splitting Strategies for Power System Islanding Operation Considering Network Connectivity. IEEE Syst. J. 2018, 12, 350–359. [Google Scholar] [CrossRef]
- Amraee, T.; Saberi, H. Controlled islanding using transmission switching and load shedding for enhancing power grid resilience. Int. J. Electr. Power Energy Syst. 2017, 91, 135–143. [Google Scholar] [CrossRef]
- Xu, S.; Miao, S. Three-stage method for intentional controlled islanding of power systems. J. Mod. Power Syst. Clean Energy 2018, 6, 691–700. [Google Scholar] [CrossRef]
- Balaguer, I.J.; Lei, Q.; Yang, S.; Supatti, U.; Peng, F.Z. Control for Grid-Connected and Intentional Islanding Operations of Distributed Power Generation. IEEE Trans. Ind. Electron. 2011, 58, 147–157. [Google Scholar] [CrossRef]
- Chiang, W.; Liu, X.; Si, S.; Li, Y.; Bengio, S.; Hsieh, C. Cluster-GCN: An Efficient Algorithm for Training Deep and Large Graph Convolutional Networks. In Proceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, KDD 2019, Anchorage, AK, USA, 4–8 August 2019; Teredesai, A., Kumar, V., Li, Y., Rosales, R., Terzi, E., Karypis, G., Eds.; ACM: New York, NY, USA, 2019; pp. 257–266. [Google Scholar] [CrossRef]
- Morris, C.; Ritzert, M.; Fey, M.; Hamilton, W.L.; Lenssen, J.E.; Rattan, G.; Grohe, M. Weisfeiler and Leman Go Neural: Higher-Order Graph Neural Networks. In Proceedings of the The Thirty-Third AAAI Conference on Artificial Intelligence, AAAI 2019, The Thirty-First Innovative Applications of Artificial Intelligence Conference, IAAI 2019, The Ninth AAAI Symposium on Educational Advances in Artificial Intelligence, EAAI 2019, Honolulu, HI, USA, 27 January–1 February 2019; AAAI Press: Palo Alto, CA, USA, 2019; pp. 4602–4609. [Google Scholar] [CrossRef]
- Nazi, A.; Hang, W.; Goldie, A.; Ravi, S.; Mirhoseini, A. GAP: Generalizable Approximate Graph Partitioning Framework. arXiv 2019, arXiv:1903.00614. [Google Scholar]
- Bianchi, F.M.; Grattarola, D.; Alippi, C. Spectral Clustering with Graph Neural Networks for Graph Pooling. In Proceedings of the 37th International Conference on Machine Learning (ICML 2020), Online/Virtual Event. 13–18 July 2020; pp. 874–883. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. arXiv 2019, arXiv:1912.01703. [Google Scholar]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. TensorFlow: A system for large-scale machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation (OSDI 16), Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Chen, T.; Li, M.; Li, Y.; Lin, M.; Wang, N.; Wang, M.; Xiao, T.; Xu, B.; Zhang, C.; Zhang, Z. MXNet: A Flexible and Efficient Machine Learning Library for Heterogeneous Distributed Systems. arXiv 2015, arXiv:1512.01274. [Google Scholar]
- Thurner, L.; Scheidler, A.; Schäfer, F.; Menke, J.; Dollichon, J.; Meier, F.; Meinecke, S.; Braun, M. Pandapower—An Open Source Python Tool for Convenient Modeling, Analysis and Optimization of Electric Power Systems. arXiv 2017, arXiv:1709.06743. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
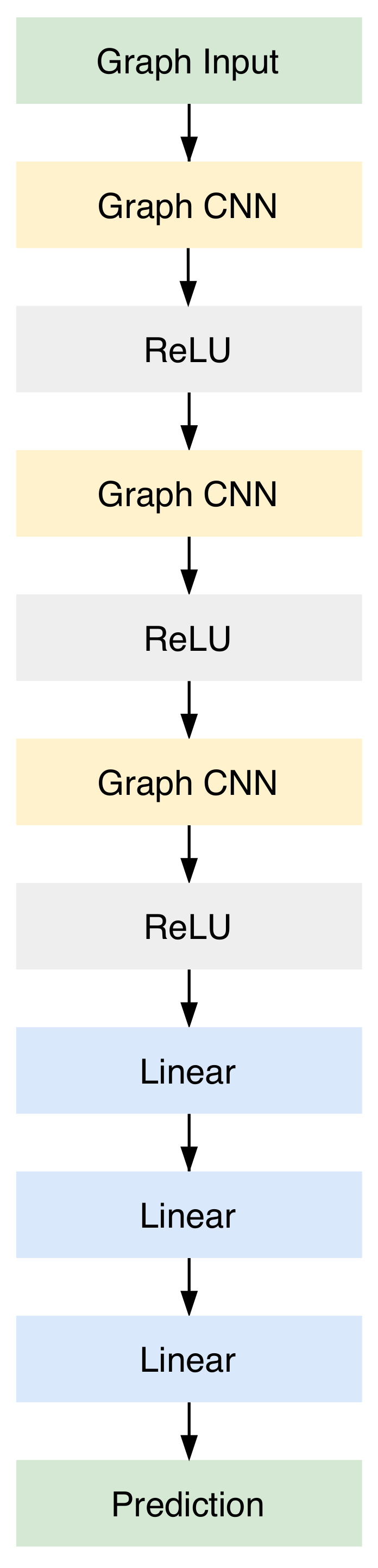
| Layer | Output Dimension |
|---|---|
| Graph CNN layer | 96 |
| 128 | |
| 256 | |
| Linear layer | 256 |
| 128 | |
| g |
| Case | Imbalance (MW) | Lines Disconnected | ||
|---|---|---|---|---|
| GAP | Min-Cut | GAP | Min-Cut | |
| 9 | 4.95 | 4.95 | 2 | 2 |
| 30 | 2.44 | 2.44 | 9 | 9 |
| ieee30 | 17.56 | 17.56 | 9 | 7 |
| 57 | 27.86 | 27.86 | 16 | 13 |
| 118 | 132.91 | 132.91 | 28 | 21 |
| 200 | 23.42 | 23.42 | 33 | 24 |
| Method | Imbalance (MW) | Lines Disconnected | No. of Islands |
|---|---|---|---|
| Kyriacou et al. [10] | 240.03 | n/a | 4 |
| Proposed (Min-cut) | 132.91 | 24 | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Spyridis, Y.; Lagkas, T.; Sesis, A.; Efstathopoulos, G.; Sarigiannidis, P. End-to-End Deep Graph Convolutional Neural Network Approach for Intentional Islanding in Power Systems Considering Load-Generation Balance. Sensors 2021, 21, 1650. https://doi.org/10.3390/s21051650
Sun Z, Spyridis Y, Lagkas T, Sesis A, Efstathopoulos G, Sarigiannidis P. End-to-End Deep Graph Convolutional Neural Network Approach for Intentional Islanding in Power Systems Considering Load-Generation Balance. Sensors. 2021; 21(5):1650. https://doi.org/10.3390/s21051650
Chicago/Turabian StyleSun, Zhonglin, Yannis Spyridis, Thomas Lagkas, Achilleas Sesis, Georgios Efstathopoulos, and Panagiotis Sarigiannidis. 2021. "End-to-End Deep Graph Convolutional Neural Network Approach for Intentional Islanding in Power Systems Considering Load-Generation Balance" Sensors 21, no. 5: 1650. https://doi.org/10.3390/s21051650
APA StyleSun, Z., Spyridis, Y., Lagkas, T., Sesis, A., Efstathopoulos, G., & Sarigiannidis, P. (2021). End-to-End Deep Graph Convolutional Neural Network Approach for Intentional Islanding in Power Systems Considering Load-Generation Balance. Sensors, 21(5), 1650. https://doi.org/10.3390/s21051650