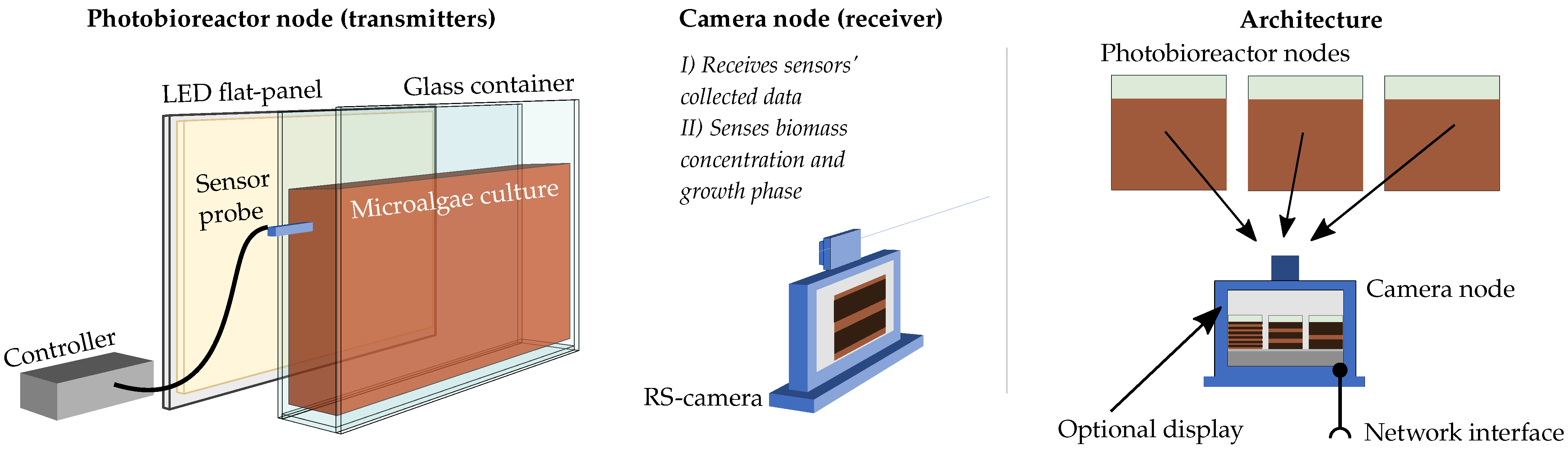
The proposed architecture presents some specific characteristics from the communication system point of view. First, the light propagates through different media from the emitter to the camera, which modifies the received optical signal. On the other hand, the camera position affects the communications’ performance since it determines the received power and the emitter image size. Furthermore, the distribution and size of the photobioreactors also impact the complete OCC system performance. In this section, all these aspects are addressed.
3.1. Communication Channel
The channel can be divided into different layers.
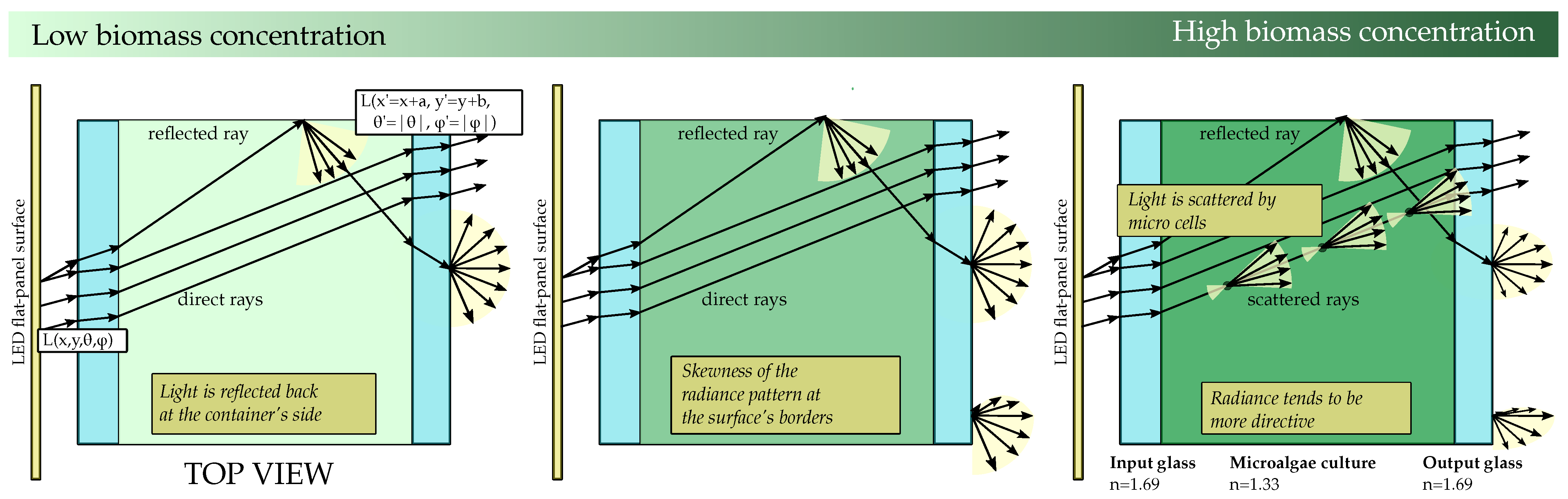
Figure 2 details the layered version of the channel, which is composed of: the inner air gap layer, the inner glass layer, the microalgae suspension in the water layer and the outer glass layer that emits the light that reaches the camera. This work focuses on the analysis of these four primary layers of the channel. The effect of the link’s air gap between the container and the camera was addressed previously in [
22].
This preliminary analysis shows two critical interfaces: the inner glass/water and the outer glass/air interfaces that affect communications’ performance and constrain harvesting optimisation.
Light rays emitted in a specific direction by the light source (
) change their trajectory upon reaching the surface of the inner glass (
). Then, those rays reach the first critical interface (inner glass/water interface) and undergo partial or total internal reflection depending on the critical angle (
) ( considering refraction indices of
,
and
for the air, glass and water media, respectively). However, total internal reflection will never happen at this critical interface in the considered conditions. The reason is that as soon as
approaches 90 degrees,
tends to 31
, which is considerably lower than
. In the microalgae medium, light rays travel with direction (
). Those rays that reach the top, bottom, left or right side reflectors of the container are reflected.
Figure 2 shows an example of one ray reaching the container’s right side and being reflected.
Finally, within the outer glass, light propagates with (, ) until it arrives at the second critical interface. The outer glass-air interface has its corresponding critical angle (). Light rays with incident angles greater than are reflected, reducing the total optical power leaving the photobioreactor.
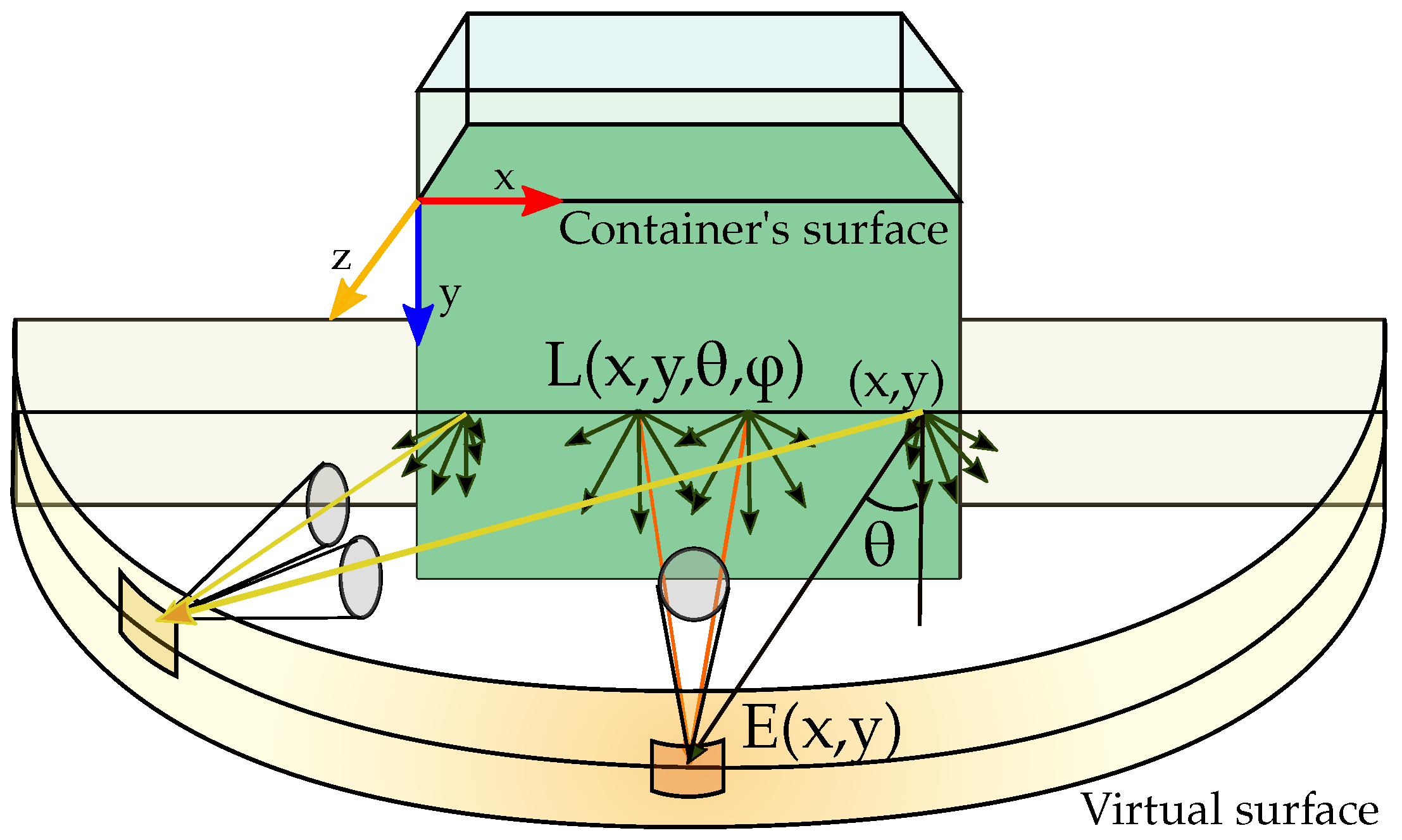
This preliminary analysis aims to better understand the behaviour of the radiance
L(
) of the extended outer glass surface (Equation (
4)); in other words, the radiant intensity
, emitted from an infinitesimal unit surface,
, and contained within a unit of solid angle aligned normal to the direction of interest,
, for a particular location,
.
After characterising the radiance of the surface, the total irradiance over a pixel is obtained by integrating the incoming radiance from any direction in the normal hemisphere that encloses the pixel area Equation (
5).
As an example,
Figure 3 shows the irradiance per unit of area of an infinitesimal portion,
, of a virtual surface that encloses the container keeping the same horizontal distance to the container’s centre point.
In the stated conditions, the radiance would be affected by different phenomena: the culture’s absorption capacity, the shading effect between cells, and light scattering. When the amount of biomass is negligible compared to the volume of water in the container, these phenomena might be neglected, and radiance can be estimated using geometrical optics. Now, considering that the channel consists of symmetrically repeating parallel layers that start and end in the same air medium, light’s incident angle
coincides with exiting radiance angle
without any hard restriction as there is no total internal reflection.
Figure 2 shows light example paths in 2D dimensions.
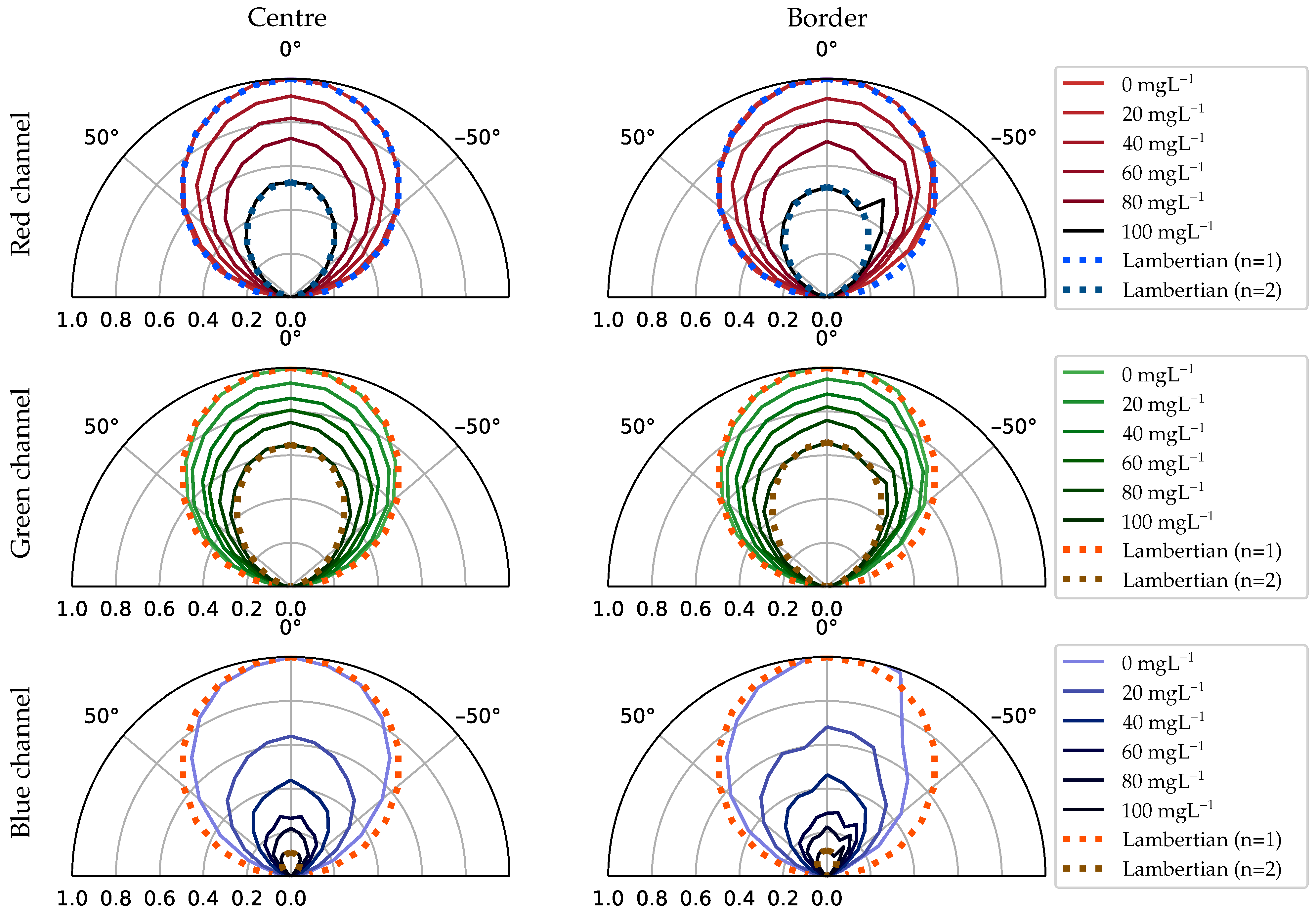
Now, considering that the bottom, top, left and right container’s sides reflect light in a specular manner, the radiance of a point (, , ) of the external surface in any direction is a fraction of the radiance emitted by the light source in the same direction (or in a shifted direction, if the ray comes from a reflection in the walls) (), but from a translated origin point, x,y, of the output point (,).
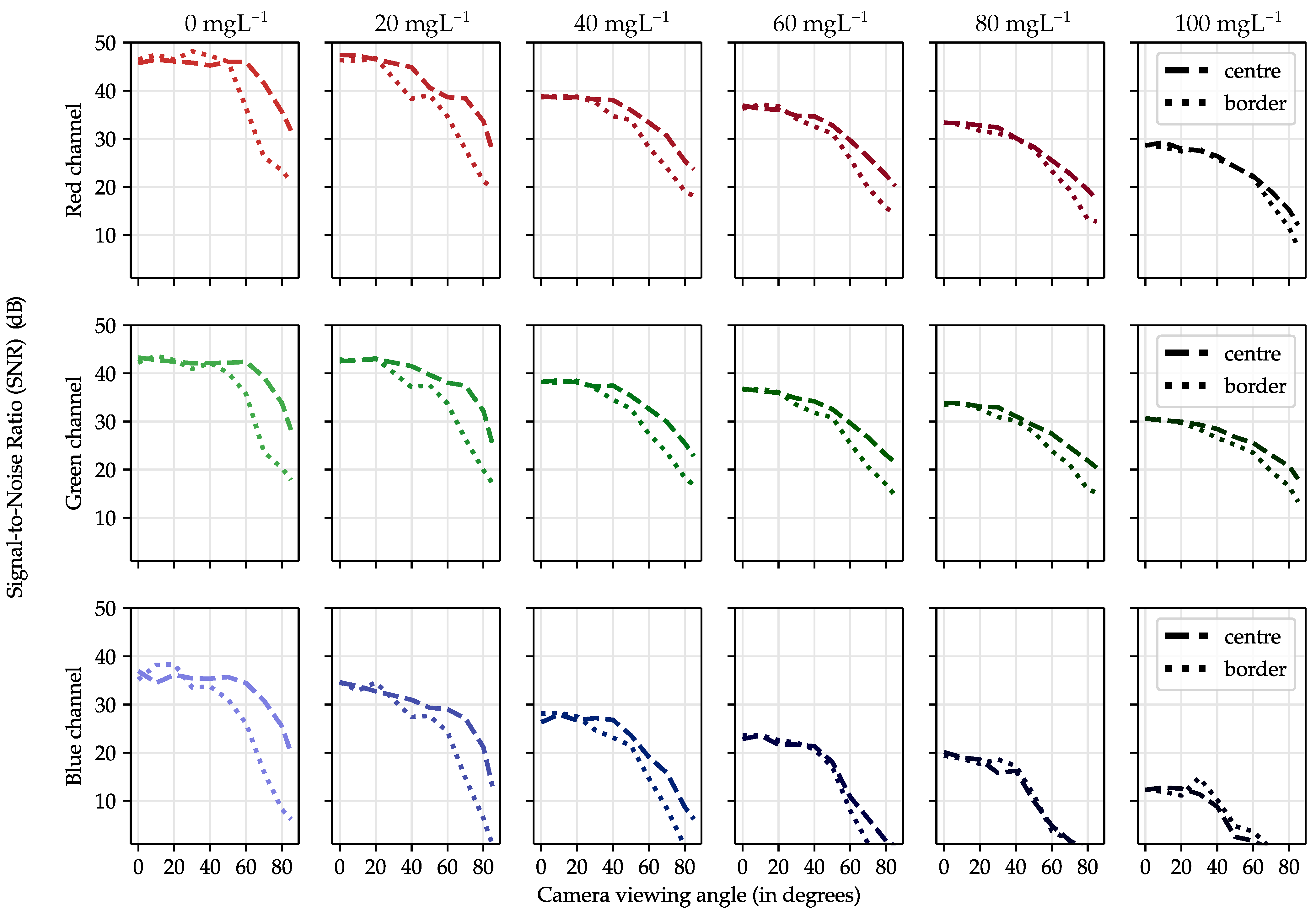
As a result, the output radiance from infinitesimal surfaces located at the container’s centre tends to mimic the original lamp radiation pattern. However, the output radiance at the borders of the container tends to skew. This skewness occurs because there are no direct light contributions. This skewness effect of the radiance pattern significantly constrains the communications’ performance, as the optical signal power recovered from specific viewpoints would not be enough to establish effective communication. As it can be extracted from preliminary experiments, this skewness can be partially reduced if the container’s sides reflection has a perfect diffuse behaviour, causing the light to be uniformly spread in all directions. However, the skewness cannot be fully mitigated since the light rays that contribute to reducing this effect come from very steep entry angles and repeatedly bounce within the container boundaries, ultimately reducing its optical power.
Regarding light power exiting the surface, it is important to consider the fraction of the incident light reflected at each interface. Considering non-polarised light the effective reflection coefficient, for each input angle,
, can be expressed by Equation (
6).
where
(Equation (
7)) and
(Equation (
8)) are the reflectances for s-polarized and p-polarized light, respectively.
where
and
are the refractive indexes of both mediums. Hence, light rays with acute entry angles have a significant amount of power reflected. This has some implications. At first, not all the optical power reaches the microalgae culture, and it will depend on the radiance pattern of the surface and the effective emission angle of the source. Finally, not all the optical power leaves the container’s surface, which is not desirable for establishing an optical communication link despite being suitable for cultivation. Under this initial configuration, when the biomass concentration is above a threshold level, the scattering and the absorption phenomena cannot be neglected. In that case, Beer–Lambert’s law can be used to describe the attenuation of light due to absorption by the biomass concentration (Equation (
9)). This equation states that the attenuation of light over a distance is proportional to the light intensity, where
C is the volumetric absorption coefficient. The latter is the product of the specific light absorption coefficient,
, and the biomass concentration (
). The integration of Equation (
9) over the light path, taking into account the wavelength dependency, results in Equation (
10).
However, as light travels through the photobioreactor, it is absorbed and scattered by the microalgae. The light intensity
(Wm
sr
) at a given location within the container,
r, and in the direction
can be determined by solving the radiative transfer equation (RTE) [
23], which represents an energy balance on the radiative energy travelling along a particular direction. In steady-state conditions, the RTE for non-collimated light, as in this case, can be expressed as Equation (
11).
where
is the scattering phase function (SPF), which represents the angular distribution of the scattered light, in other words, the probability that radiation travelling in a given direction,
, will be scattered to the direction,
, of interest. This function is determined by the size, shape and refractive index distribution of the scattering particle.
is the extinction coefficient (m
) composed by the scattering coefficient,
, and the absorption coefficient,
(m
). These two parameters can be expressed in terms of the averaged scattering
and absorption
cross-sections (m
), respectively (Equation (
12)).
where
N is the microorganism concentration expressed in number of cells per m
of water suspension.
This RTE equation given by Equation (
11) reveals that the scattering absorption cross-sections and the SPF have an important role in predicting light transfer in photobioreactors for simulation, design and optimisation purposes. However, these characteristics are interrelated and difficult to estimate from the electromagnetic wave perspective, given the microorganisms’ complex morphology. Nonetheless, they can still be measured experimentally with more or less difficulty and related to some parameters of the cell, as detailed in [
24]. Furthermore, these radiative properties of microalgae (the absorption cross-section, scattering cross-section and scattering phase function) vary significantly over time, depending on the strain’s growth stage, as shown by the studies [
25,
26]. As all these radiative parameters depend on the wavelength of light and because they vary in such a significant way through time, it can be considered that the values obtained by an RGB camera would correctly identify not only the strain, but its growth’s state.
Regarding the communications’ performance, although the presence of these microorganisms attenuates the signal before it reaches the exposed container’s surface, it may be beneficial in some cases because it distributes the optical power more evenly, uniforming the radiation pattern over the entire container’s surface. In conclusion, microalgae particles’ scattering phenomena can be exploited for communications in scenarios where the camera is not facing perfectly perpendicular to the transmitter surface.
3.2. Data Rate Analysis
The maximum achievable data rate for a photobioreactor depends on its projection’s vertical size over the image; in other words, the total number of vertical samples (rows of pixels) recovered from the signal [
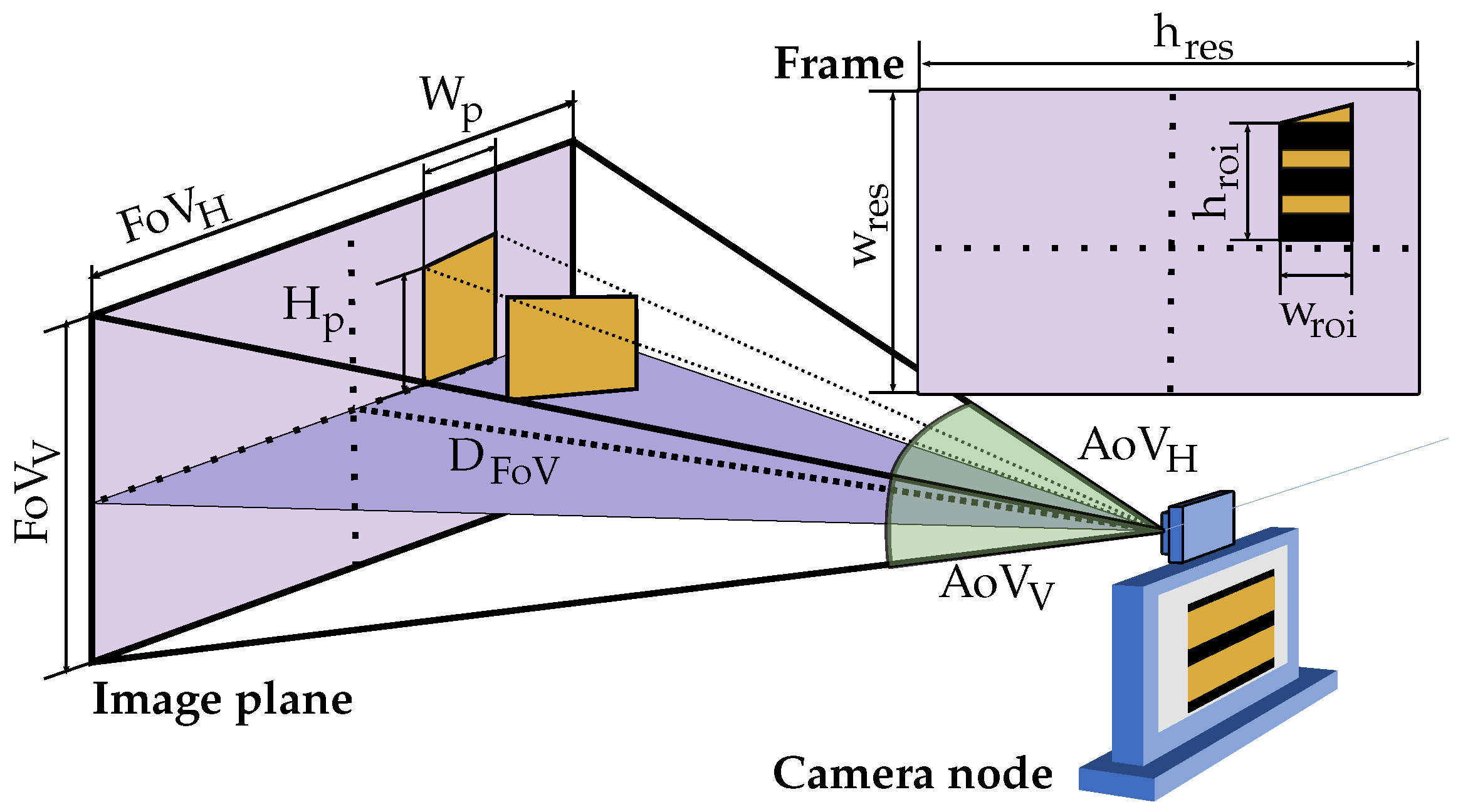
27]. Consequently, it is necessary to consider the scenario’s geometrical configuration, the relative positions between the camera and the photobioreactors and their size.
Equations (
13) and (
14) relate the projection dimensions (in meters) of a rectangular surface over the scene plane,
,
, with its corresponding pixels dimensions,
,
.
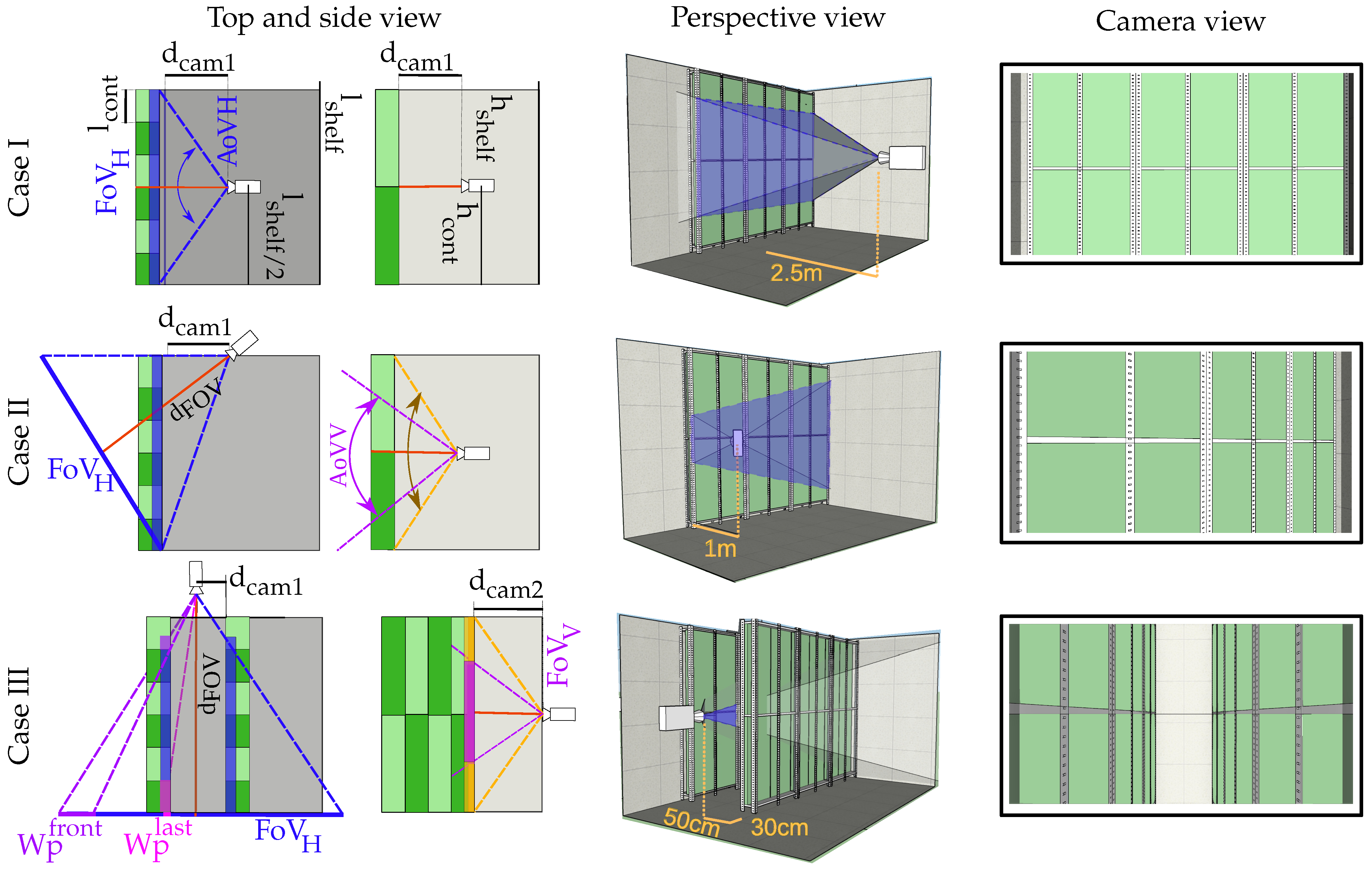
Figure 4 shows all the geometry and camera parameters involved in a generalised scenario.
where
and
are the pixel dimensions of the image,
and
the horizontal and vertical angle of view (AoV) of the camera (in degrees), respectively, and
the distance (in meters) from the camera lens to the scene plane.
Following Nyquist’s criterion (
), the minimum number of vertical samples of the signal required per symbol can be computed using Equation (
15).
It must be remarked that communication takes place in a windowed manner. Leaving aside the reflections with the objects present in the scene [
13,
28], the signal has to be recovered mainly from the projection within the image of the light source where the signal quality is considerably better. Hence, during the acquisition, only a fraction of the total data sent is sampled by the sensor. While the sensor is not scanning the transmitter’s surface, but another part of the scene, it will remain blind to the light changes of the transmission [
19]. To overcome these blind periods, the data packets must be sent repeatedly (at least while the camera is acquiring two full frames). In addition, to avoid packet losses, the source’s image projection,
, must fit at least two complete packets, as was detailed in the previous work [
29]. With these restrictions (Equation (
17)), the overall transfer rate (in bauds) is obtained from Equation (
16).
where
is the equivalent number of symbols per data packet. On the other hand, the projection’s width in pixels (number of columns) also plays an important role in communications. Pixels located in the same row are exposed to light simultaneously, and they can be used to filter out noise, thus strengthening the signal-to-noise ratio. Moreover, wider areas aid source discovery and tracking and considerably ease the decoding routine. As a consequence, a minimum pixel width must be selected as a design requirement.
Finally, it is worth mentioning that the proposed system’s achievable capacity considerably exceeds the requirements for accurate monitoring of the culture parameters. To obtain a preliminary idea of these requirements, the following considerations are taken into account. The selected parameters to be measured are acidity, temperature, light conditions, carbon, nutrients, inhibitors presence and O
degassing. The packet’s payload allocates twenty bytes per parameter, which is a much larger allocation than necessary. Furthermore, given that the culture’s temporal evolution is considerably slow, samples of the culture can be taken reliably every 5 min, which offers a substantially acceptable temporal resolution. Based on these considerations, the required capacity is about four bits per second. Therefore, the hundreds of bauds per second that can be sent using the proposed system, as specified in
Section 4.1, satisfy the stated capacity requirements.
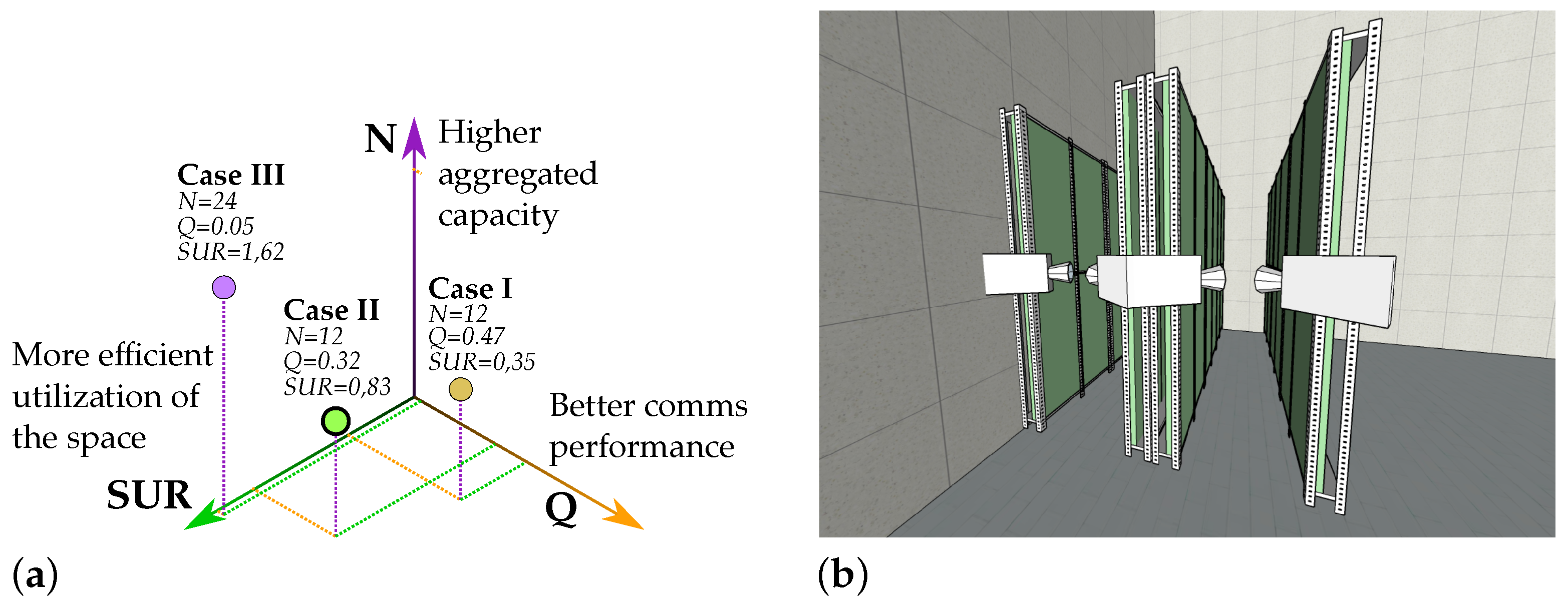
3.3. Plant Distribution
The distribution of the photobioreactor nodes across the room plays an essential role in communications. To establish a link, the receiver should visualise each node, and consequently, it is necessary to reserve some space free of obstructive interference between the transmitters and the camera. This reveals the importance of analysing different possible solutions for placing the nodes until finding the one that best suits the project’s initial requirements, either in terms of better link quality, higher capacity or more efficient space exploitation.
In a previous work [
22], a metric was proposed to compare the performance of different solutions. Nevertheless, the complex nature of this problem, which involves several variables and a wide range of possible initial requirements, highlighted the need to modify this classification strategy. This work proposes replacing the original metric based on a single value with a modified multidimensional metric, Equation (
18), allowing a more flexible classification of the arrangements. This new metric offers a comparison tool in which it is left to the designer’s discretion to select a specific application design’s priorities.
It consists of three independent variables: the number of simultaneous photobioreactors monitored by a single camera, N, a communications performance metric, Q, and the space utilisation ratio (SUR). The first two variables account for the overall achievable data rate of the setup. The last term relates the total equivalent volume of the containers bound to biomass harvesting, , and the minimum room volume needed, . The optimisation of this term has direct implications in the reduction of production costs and, therefore, the viability and competitiveness of cultivation plants based on artificial lightning and vertical racks.
The proposed
Q metric is derived from the well-known Shannon–Hartley’s equation [
30] for estimating the channel capacity for each container (Equation (
20)).
where
C is the capacity in bits per second,
is the bandwidth of the channel in Hertz and
is the SNR, expressed as a linear power ratio. As was previously mentioned, communications happen in a windowed manner. In other words, the transmission effectively takes place during a fraction of the time to acquire a frame,
. This fraction of time, or channel availability,
, depends on the geometrical configuration,
, and on the elapsed time between when the camera finishes capturing one frame and starts with the next one
(Equation (
22)). However, this last term is considerably lower than
and can be neglected.
Adding this factor to Equation (
20), the effective capacity is obtained for each container, as Equation (
21) shows.
The proposed metric
Q is then defined as the relationship between the channel’s capacity for a particular arrangement and container,
C, and the ideal capacity,
, Equation (
23).
The vast number of parameters involved in this metric’s computation makes this metric unreasonable for a practical analysis of different plant distributions, even more so if there are plenty of configurations to be compared. Hence, for this metric to be a useful tool for this purpose, it is necessary to assume a series of coarse approximations. These approximations would greatly simplify the practical comparison of two cases without incurring harsh penalties. First, it is important to remark that the camera’s hardware and configuration would not change. Consequently, the bandwidth, which depends on the sampling frequency and the image sensor’s exposure time, remains constant (
). On the other hand, the maximum capacity will be achieved when the transmitting source occupies the image entirely in the scanning dimension (usually from top to bottom). In this way, the link availability is kept while capturing a frame (
). With these considerations, Equation (
23) could be reduced to Equation (
24).
Now, using the first order Taylor approximation of the logarithmic function (at x = 0), Equation (
25), results in Q as given by Equation (
26).
In this way, the measurement of the capacity of a placement can be approximated to the comparison of the SNR with the best case and the size of its projection in the image. However, assumptions regarding the relationship between the SNR under study and the best-case SNR can simplify the analysis. These assumptions are detailed below. First, the container radiance varies smoothly through the entire surface, or at least in the area were the signal is recovered. Not the whole surface of the container is utilised for signal detection, but a fraction of it. The radiance at any given direction is expressed with respect to the maximum radiance
(Equation (
27)).
The pixel FoV is small enough to assume that the pixel irradiance’s contributions come from the same emitter radiance’s output angles. Furthermore, the use of image-forming optics compensates the power loss due to spherical propagation with the projected size of the optical source on the image sensor [
31]. Therefore, the power received by a pixel (Equation (
28)) in a given direction can be approximated as the ratio of the total received power in the direction of maximum radiation, and it can be related to the ratio of the emitted radiance.
Furthermore, assuming that the region of interest (ROI) where the signal will be recovered is constant in width and height, then the total received power would be the aggregation of all contributions from the ROI’s pixels. Therefore, the optical power received within the ROI is approximated by Equation (
29).
Regarding the noise power, no external interfering optical sources were considered for simplicity. The primary noise sources are thermal noise (), shot noise () and quantisation noise (), which is generated by the ADC of the camera. Besides, thermal noise does not depend on the signal power, whilst shot noise is affected by the received optical power. Nonetheless, considering the application scenarios of this work, it is expected that the shot noise contribution could be neglected with respect to thermal noise. Hence, the noise power is the same regardless of the receiver’s position.
Therefore, comparing the radiation at different viewing angles can give a good approximated idea about the difference in the SNR of different container’s arrangements.
In conclusion, the final approximation of Q (Equation (
32)) is obtained by combining Equations (
24) and (
30).
As mentioned, this metric is intended to be easy to compute and practical when guiding the engineer to distribute the plant most optimally. The approximations stated above greatly simplify the comparison of two cases without incurring non-affordable penalties. This Q parameter allows indirectly approximating the maximum transmission rate achievable by each photobioreactor node (Equation (
17)).
In this work, the minimum value of Q (), of all the containers, is used to evaluate a particular arrangement. The reason is that as an initial requirement, all the containers must share the same data rate. To achieve this, all the emitters will adapt their transmission to the minimum available in the scene. It should be clarified that this metric varies between zero and one, where one implies the maximum theoretical performance (optimised use of channel capacity).


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}