2.1. Experimental Setup
The proposed experimental setup for verifying a next generation monitoring station consists of three measuring instruments and a six-axis industrial robot arm, performing the 6C motions. The great advantage of using a robot arm lies in the fact that we have full control over the conducted experiment. While executing the prescribed motions, the robot features a feedback system for stabilizing its own trajectory. This comes with two main advantages. Firstly, it allows the robot to closely match the prescribed input motion. Secondly, it ensures the availability of a high-precision 6C ground truth, which serves for the validation of our instrumentation and the fusion process that is achieved by the suggested KF scheme. Nonetheless, minor stability issues may still occur at two locations: the connection to the concrete ground and the instrument platform itself. The robot is bolted to the ground via a 1.5 cm thick metal platform, which could be subject to minor bending. The bending of this platform would not be seen in the robot feedback, but recorded by the mounted instruments. Additionally, flexure of the steel platform on the robot arm, which is used to support the different instruments, could result in differential motion in the case of high frequencies, with respect to the motion executed by the robot. Both of these occurrences are considered to be negligible in our experiment, since the motion is well within the robot limitations, and the platform is rigid.
Although the motion of the robot is highly repeatable, three main limitations arise: (1) there is a weight limit of 7 kg that we can load onto the robot arm, which restricts the instruments loaded for a single experiment—this is especially important for the rotational sensors. Instruments that are typical in geodesy and classical seismology include high-quality instrumentation with low weight, but there is currently no rotational sensor with similar quality-to-size proportions [
31]; (2) during large accelerations, the axes of the robot arm are subject to large forces, which will initiate a full stop if they overstep a certain threshold; and, (3) the smallest rotation steps are at
°, which limits the sensitivity with which we can perform earthquake-like motions.
Given the robot’s limitation in generating low amplitude rotations, experiments of rather large amplitudes need to be carried out, allowing for use of a light-weight, but high-quality, inertial measurement unit (KVH 1750 IMU). While this suffices for these proof-of-concept experiments, this device is not ideal for general monitoring, as its response is not sufficiently broad-band to capture strong earthquake motions, and it does not have the resolution to capture low amplitude motions on typical infrastructure. Additionally, we used a Javad antenna and Septentrio receiver, as well as an EpiSensor and Centaur digitizer to measure the performed motions in displacement and acceleration. The specifications of all three instruments are listed in
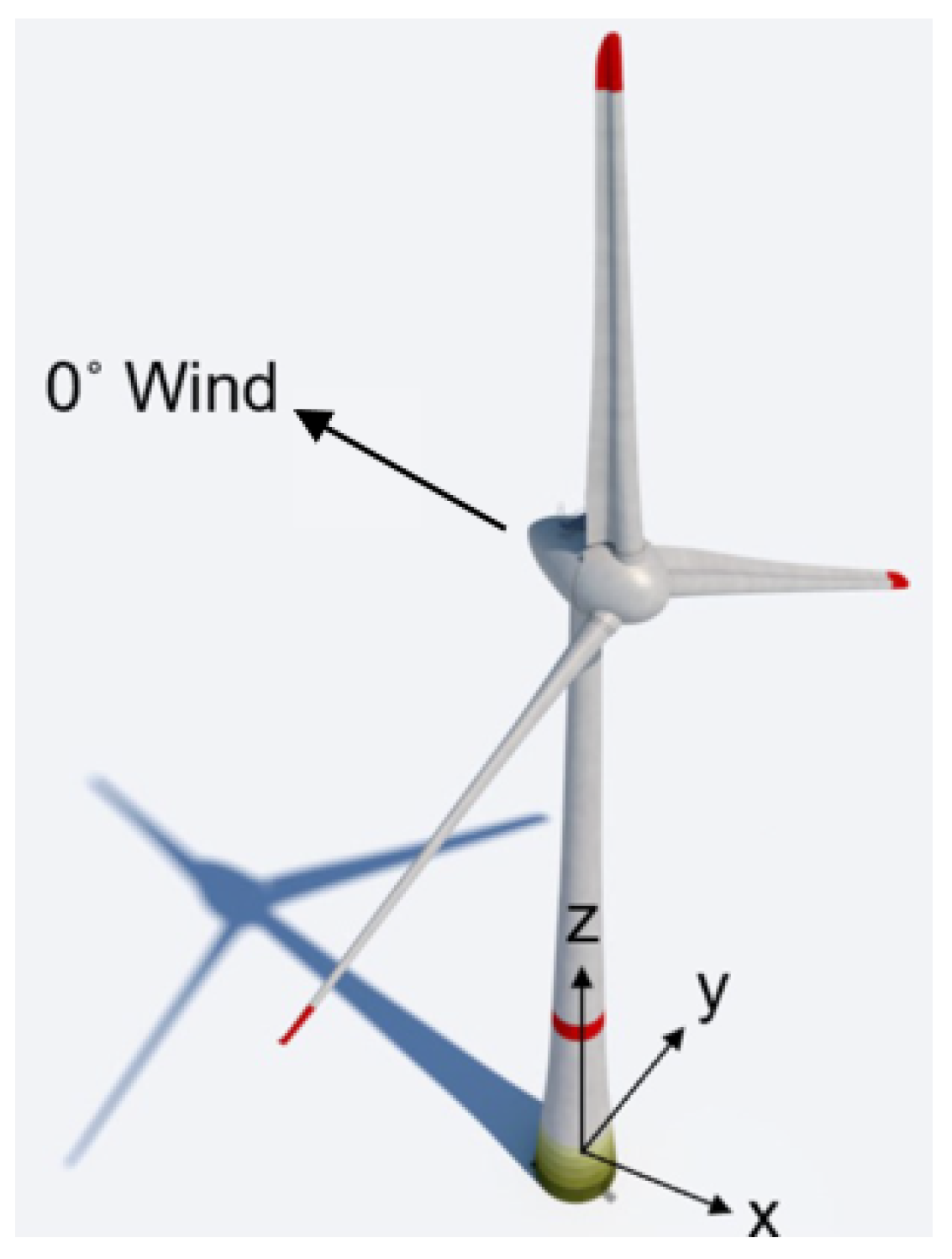
Table A1. To have both the accelerometer and the rotational sensor placed near the point of rotation, we mounted these separately and carried out the experiment twice. The instrument setup, together with the orientation of the three axes of the local coordinate frame, can be seen in
Figure 1, below.
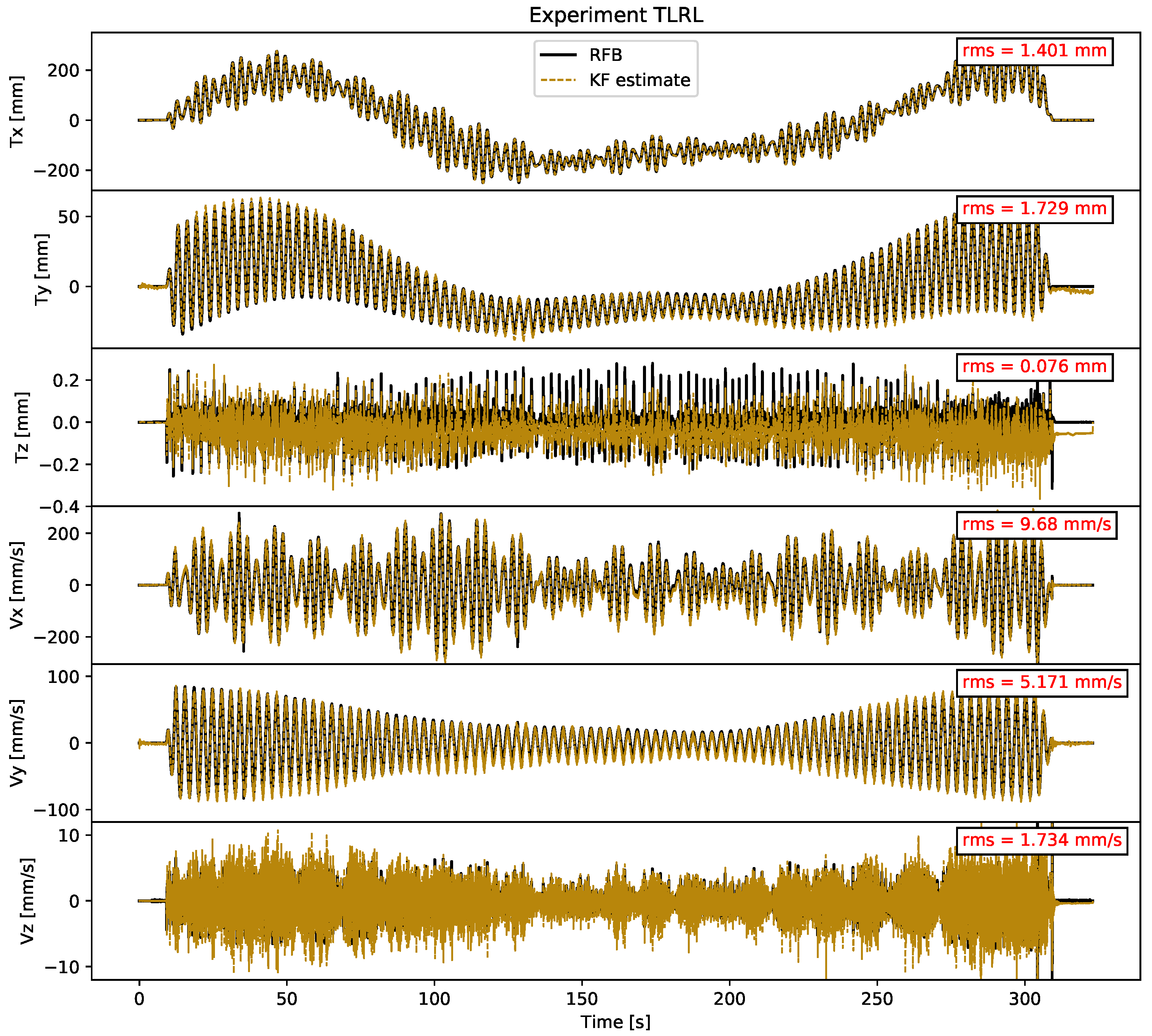
The motion performed in the experiment is 300 s in duration and includes translations in the horizontal axes as well as rotations around them. No motion is executed along or about the z-axis. Nonetheless, low-amplitude and high-frequency ticks are visible in the vertical axis, due to changes of the rotation direction of the robot axis. The basis for our experiment is the motion on top of a wind turbine tower, during wind excitation, as seen in
Figure 2. The simplified motion includes five main frequencies, where the translation in the
x-axis was coupled with the rotation around y and vice versa. The dominant frequency range is 3 Hz.
Table A2 shows the exact values and amplitudes. We performed three different amplitude sets for these frequencies and performed them twice.
Table 1 shows the different amplitudes for the three experimental sets. The naming is designed to facilitate comprehension for the reader. T: translation, R: rotation, L: large, S: small.
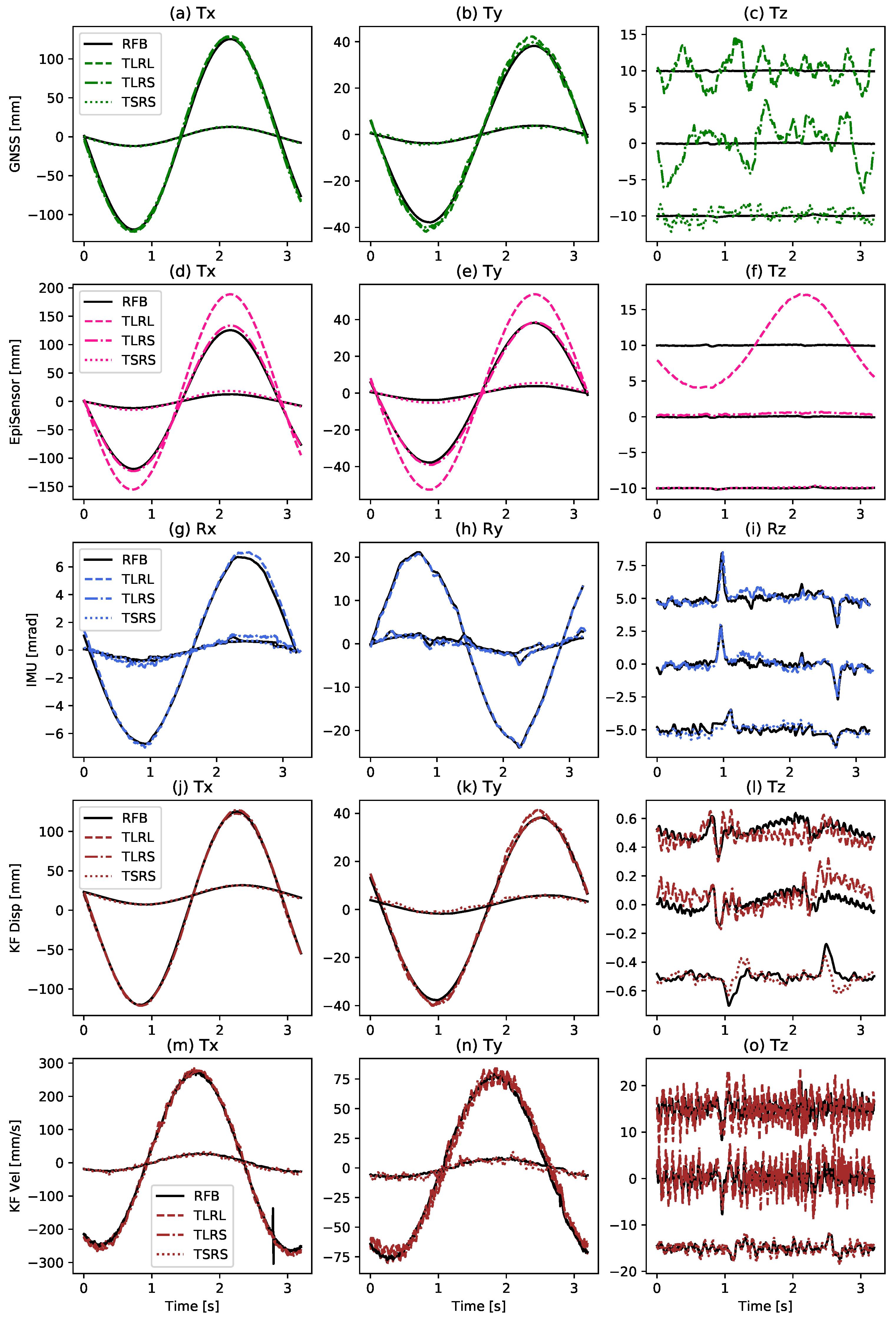
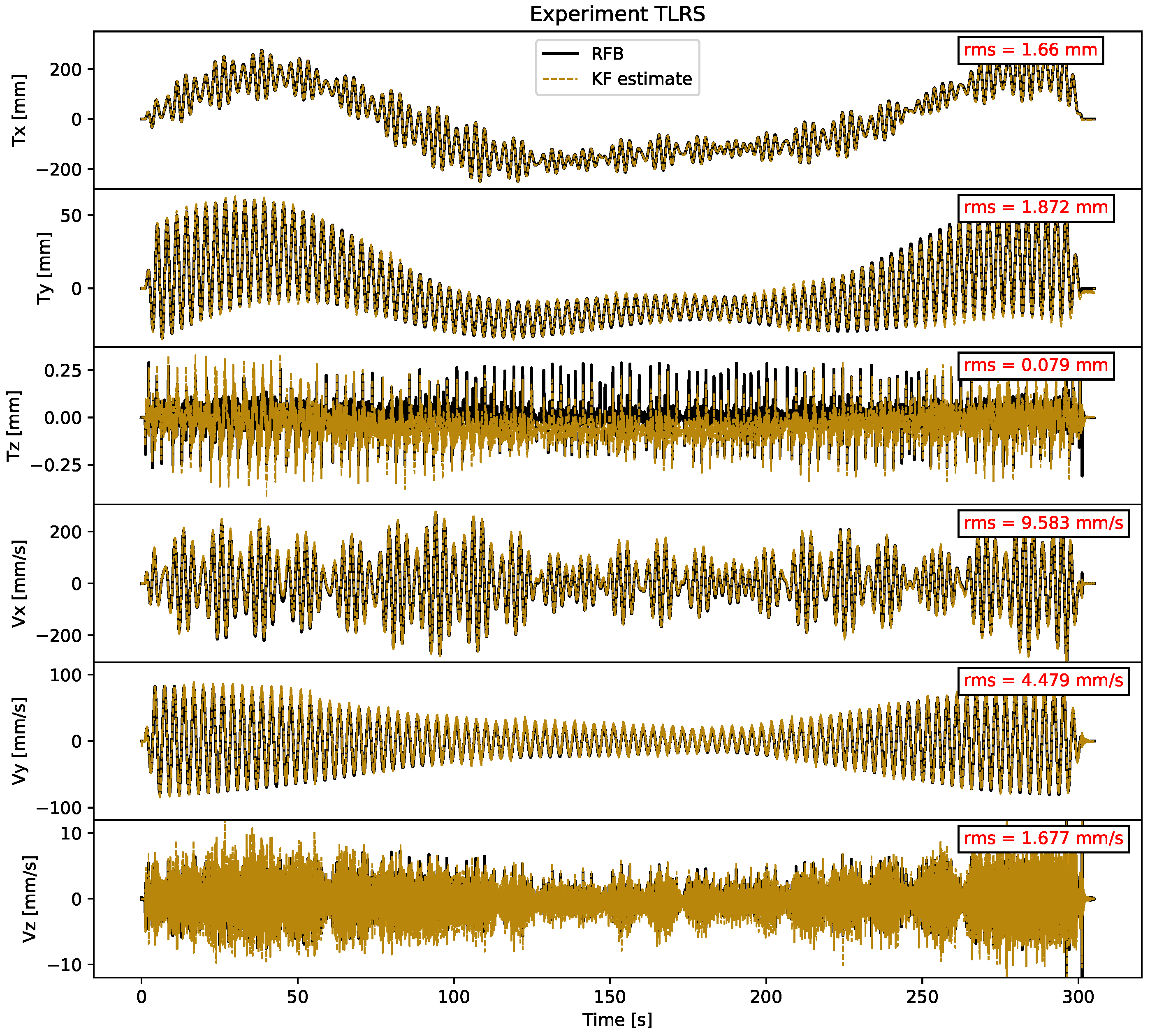
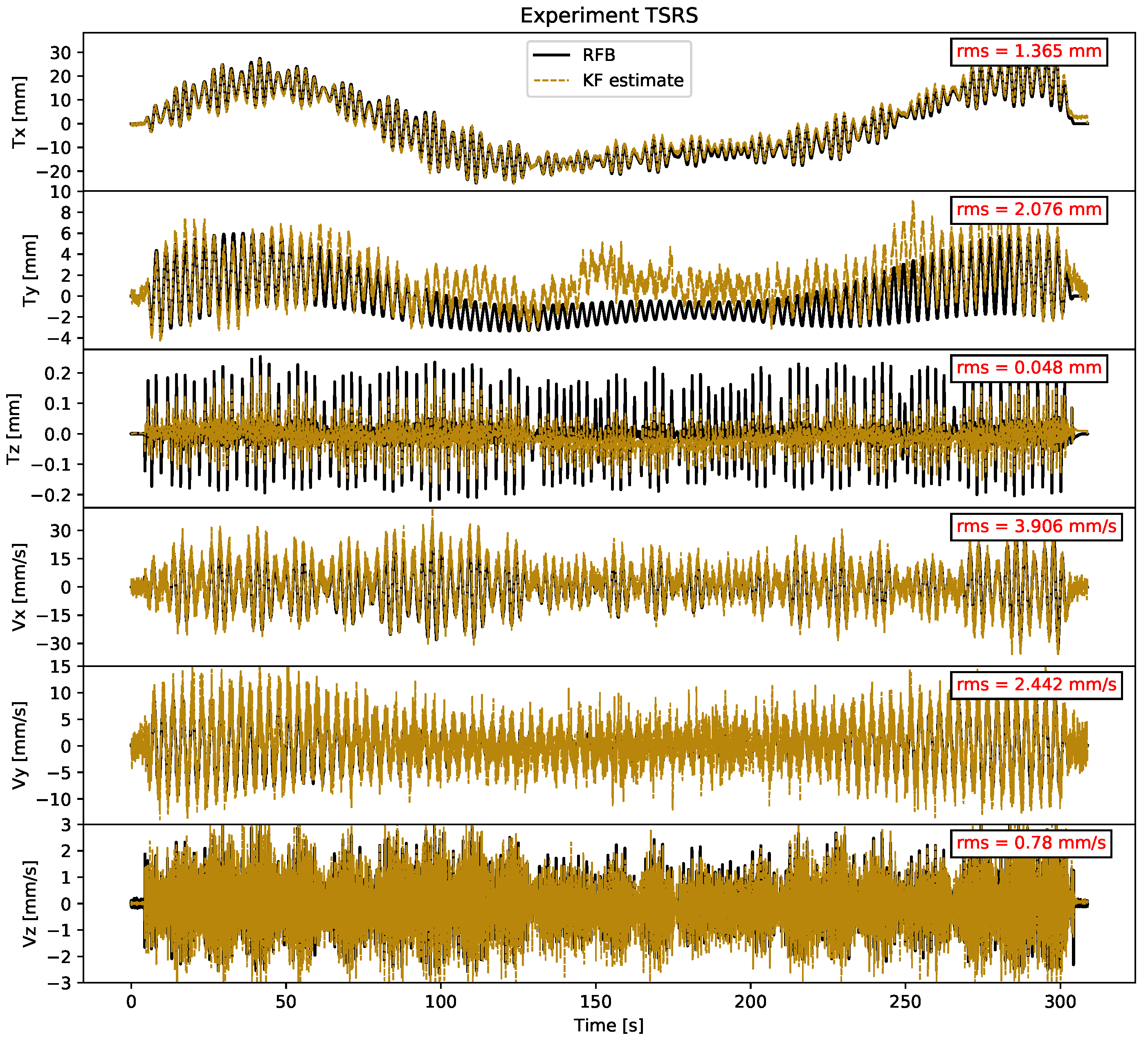
Set 1 (TLRL) is characterized by large rotations and large translations. Set 2 (TLRS) has the same translation amplitude but lower rotations. Set 3 (TSRS) uses small amplitudes in both, translations and rotations.
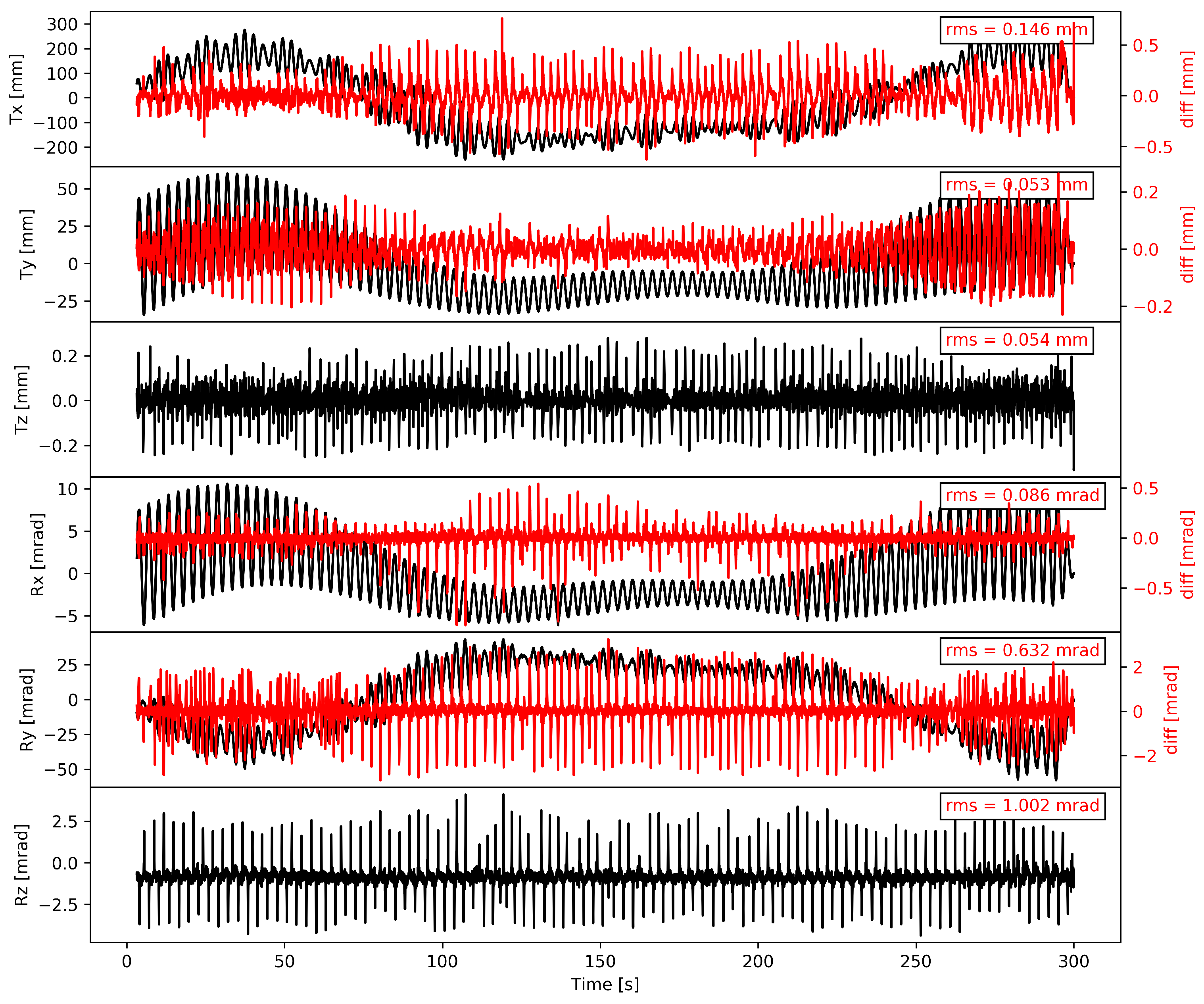
Figure 3 depicts the experiment TLRL, including the difference of the robot feedback (RFB) to the input motion and the root mean squared error (RMSE) thereof. The three different experimental sets will demonstrate the following five challenges: low amplitudes for GNSS as compared to the noise level, GNSS antenna phase center corrections, large gravitational leakage for the accelerometer, low-frequency motion for the accelerometer, and low-frequency motion for the rotational sensor. These instrumentation challenges, as well as the Kalman filter performance, will be analyzed in comparison to the robot feedback.
Because we are using the robot feedback as a ground truth for the accomplished motion and, therefore, as a reference for comparing the KF estimates, it is important to determine the quality and repeatability of these signals. This was analyzed by comparing the four repetitions of one experiment with each other and calculating the RMS of the discrepancies (error) in terms of the translations and rotations. The RMSE is calculated by using the difference of all experiment pairs (
and
), resulting in six RMSE values, as seen in the following equation:
Table 2 shows the mean of the resulting six RMSE error values per experiment and per axis. The TLRL and TSRS experiments show very low RMSE values of below 0.35 mm in the three translational axes. The RMSE discrepancy in the rotational axes appear lower for large motions with values between 0.16 and 0.02 mrad than for lower amplitude motions with 0.28 and 0.07 mrad. This is expected, since the robot is at its resolution limit for small rotations. The TLRS experiment yields worse results than the other two. With a translational RMSE discrepancy five to 30 times larger than for the other experiments, the quality is definitely lower. The reason for the high RMSE is primarily attributed to the lack of precise synchronization, as described in
Figure A1 in the Appendix. The sub-mm RMSE values of the RFB during experiments, for which a better synchronization is achieved, allow for us to compare the instrument recordings of the different repetitions. Therefore, we can trust that the robot has high-quality repeatability, allowing for us to combine instrument recordings that were collected over different experiments, as well as use the RFB from different repetitions to compare against each other. For this reason, we use the one repetition of the TLRS experiment that features precise synchronization as the ground truth for all TLRS experiments. We are aware that not mounting the instruments simultaneously will induce additional errors deriving from the noise from different repetitions. However, it was the only way to ensure that the IMU as well as the EpiSensor can be as near as possible to the point of rotation of the robot arm. Otherwise, the EpiSensor would have been subject to additional and larger effects that originate from apparent forces (Centrifugal, Coriolis, and Euler forces), since all three are dependent on the length of the offset between point of rotation and the instrument explained in
Section 3.1.
2.2. Pre-Processing
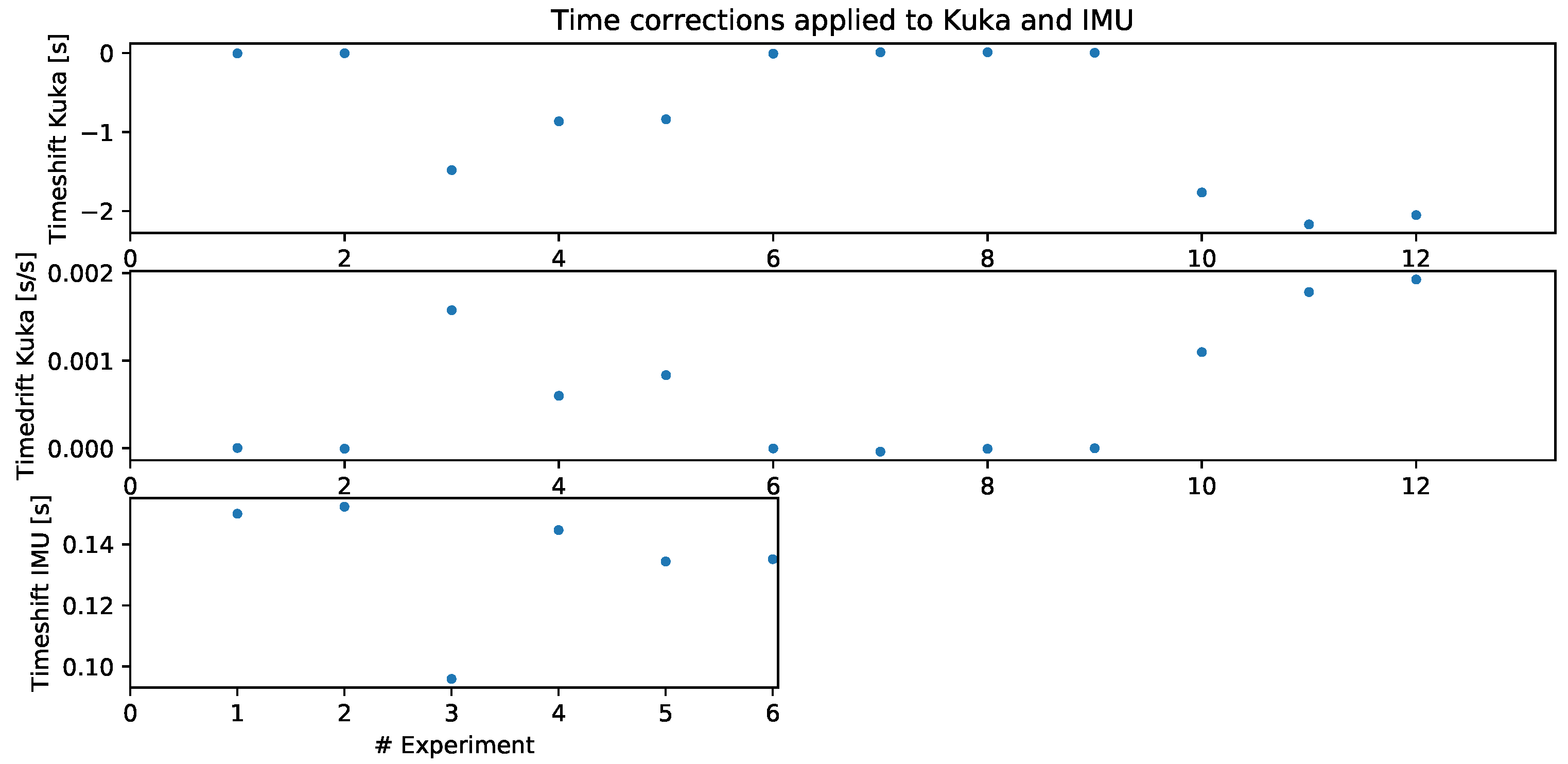
Perhaps a main hurdle in merging different instruments into a combined motion solution lies in time synchronization. The design of a robust monitoring station requires a single timing device, which provides the timing for all deployed instruments. This assures synchronized time stamps and, therefore, better quality of the sensor fusion. Such a timing device was not yet implemented in our study, so time corrections had to be applied in emulating the final solution see
Table A3. The procedure for time correction is described in more detail in
Appendix A.3. Additionally, we independently and separately mounted the accelerometer or the IMU and GNSS antenna as near as possible to the rotation point and performed the three experimental sets twice in order to have both the accelerometer and IMU close to the point of rotation. This means that, in reality, 12 individual experiments were setup, with the EpiSensor (accelerometer) data shifted in time to match the IMU recordings, resulting in six experiments to be fused in the KF.
The GNSS raw data are processed with the commercial GrafNav software in relative positioning mode, using a very short baseline of 5 m. We are using GPS, GLONASS, Galileo, and Beidou satellites for our L1/L2 solution with a sampling rate of 100 Hz. An L1/L2 solution means that we use the signals of the two frequencies L1 and L2 for GPS/GLONASS, E1 and E5b for Galileo, and B1l and B2l for Beidou to determine the positions. This is the best possible solution for GNSS, yielding the lowest noise. The observation time series for the filter only includes the horizontal components. The vertical (z) component is assumed to equal zero, since the high-frequency tick motion of the robot that is seen in
Figure 3 is well below the noise level of the GNSS.
All of the instrument recordings, as well as the robot feedback (RFB), are interpolated to the EpiSensor time-stamps with a sampling rate of 250 Hz for the IMU, EpiSensor, and RFB data, and a sampling rate of 100 Hz for the GNSS data. The IMU data are integrated and high-pass filtered with a corner frequency of 0.001 Hz, while the other instruments are left unfiltered.
2.3. 6C Kalman Filter
The methodology that is chosen for the combination of the three instruments is the standard sensor fusion linear Kalman filter (KF). An advantage is the ability of combining diverse instruments, measuring different quantities and at different sampling rates. These measurements are then assigned distinct weights through appropriately configured process and measurement noise co-variance matrices, which optimize the combined input to output the desired estimated quantities. In the field of navigation and odometry, the KF is a renowned methodology, which has been in use for decades [
32]. The KF combination of GNSS with an accelerometer sensor for seismic applications has first been successfully shown by [
23]. Almost a decade later, the rotations were included for the first time into the filter equations to correct the orientation of the acceleration sensor [
19]. The basis of the proposed configuration is taken from [
23] and it is developed further for use with the 6C configuration. Two pre-computations are executed prior to the filter itself, namely the integration of the angular velocity
, see Equation (
2), and the rotation of the acceleration recordings
into the local coordinate system, see Equation (
4). The filtering and integration could be implemented within the filter itself, allowing for real-time application. The goal of this paper was not a real-time implementation, so it is not done here. The angular velocities are integrated with a simple trapezoidal rule for time steps
and
k that are separated by
, as in Equation (
2). The resulting angles
are then input into the Euler rotation matrix
in Equation (
3), which is used to rotate the acceleration recordings back into the local frame in Equation (
4). GNSS antennas are often attached to a pole with varying length and the tilting of this pole can potentially introduce additional translations. In our case, the short antenna pole is also offset in a positive y-direction, since the IMU and EpiSensor are situated over the point of rotation, as seen in
Figure 1. Coupled with the antenna phase center offset, the vector from the point of rotation to the antenna phase center is
. With the knowledge of the occurring rotations, we calculate the displacements that arise with Equation (
5), and use them during the filter process.
The state (process) equation of the KF is designed while using the standard adoption of displacement and velocity in the state vector
. The measured and pre-rotated acceleration
and the rotated height vector
, serve for formulating the KF input vector
, as defined in Equation (
6).
where
,
is the process noise vector, which is assumed to be drawn from a zero mean multivariate normal distribution with covariance
.
and
are the state and input matrices.
The only observations, which are included in the observation vector
of the devised KF, pertain to the GNSS positions
, as seen in Equation (
7).
where
is the process noise vector, which is assumed to be drawn from a zero mean multivariate normal distribution with covariance
.
and
are the feedthrough (or feedforward) matrices, respectively.
Table 3 summarizes the steps of the linear KF. The prediction step utilizes the state equation of the filter to obtain a prior estimate of the state,
. Here, the notation
is used to denote the estimate of the state
at time step
i, being conditioned on information up to time step
j. The prior estimate of the covariance matrix
of the state vector is estimated using the information from time step
, as well as the process noise variance matrix
. The availability of measurements is not yet taken into account. In the subsequent update step, the innovation
, i.e., the difference between the actually measured GNSS data,
, and the KF-predicted prior estimate of the displacement
is calculated as
. This is later used for the correction of the prior given the measurement information at time step
k, i.e., the posterior KF estimate
. For this, the Kalman gain
needs to be further calculated, through the variance of the state vector and the measurement noise variance matrix
. The Kalman gain is finally used as a weight (gain) to correct the prior estimate of the state variance
, as well as the state itself,
, as outlined in the summary equations of
Table 3.
At this point, it is recalled that the measurements that are to be fused are acquired at different sampling rates. More specifically, the GNSS unit employs a 100 Hz sampling rate, while the IMU and rotational sensor sample at 250 Hz. The KF naturally allows such a multi-rate sensor fusion. The KF states are estimated at 250 Hz, which requires a linear interpolation at every second GNSS 100 Hz time step to offer observations that align with integer multiples of the 1/250 time step of the process equation of the KF. For the time steps, where no GNSS observations are available, the filter operates in prediction mode, while using the process equation, and the update step is skipped. Thus, the prior predicted state and the state variance are not corrected with the Kalman gain, but are directly taken as the posterior. The GNSS sampling rate is high enough to ensure that the drifts that are caused by numerical integration (process equation) are minimal.
The process and measurement noise covariance matrices
and
allow for tuning the filter, based on the confidence that is attributed to the state equations (integration) and the assumed reference observations (GNSS). The tuning refers to the amount of correction that is applied to the state vector through the Kalman gain in the update step of
Table 3. These covariance matrices can be auto-tuned within the filter itself, by quantifying the actual model errors [
33]. However, for this study, we are keeping these matrices constant (time-invariant) during the filter procedure. The chosen values are based on the RMSE of the difference between the instruments and robot feedback (RFB), and they have additionally been tuned based on how well the KF estimation agrees with the RFB. In
Table 4, the values for
and
are explicitly shown. The TSRS experiment features slightly different
values, because the translation amplitudes are lower for this experiment.
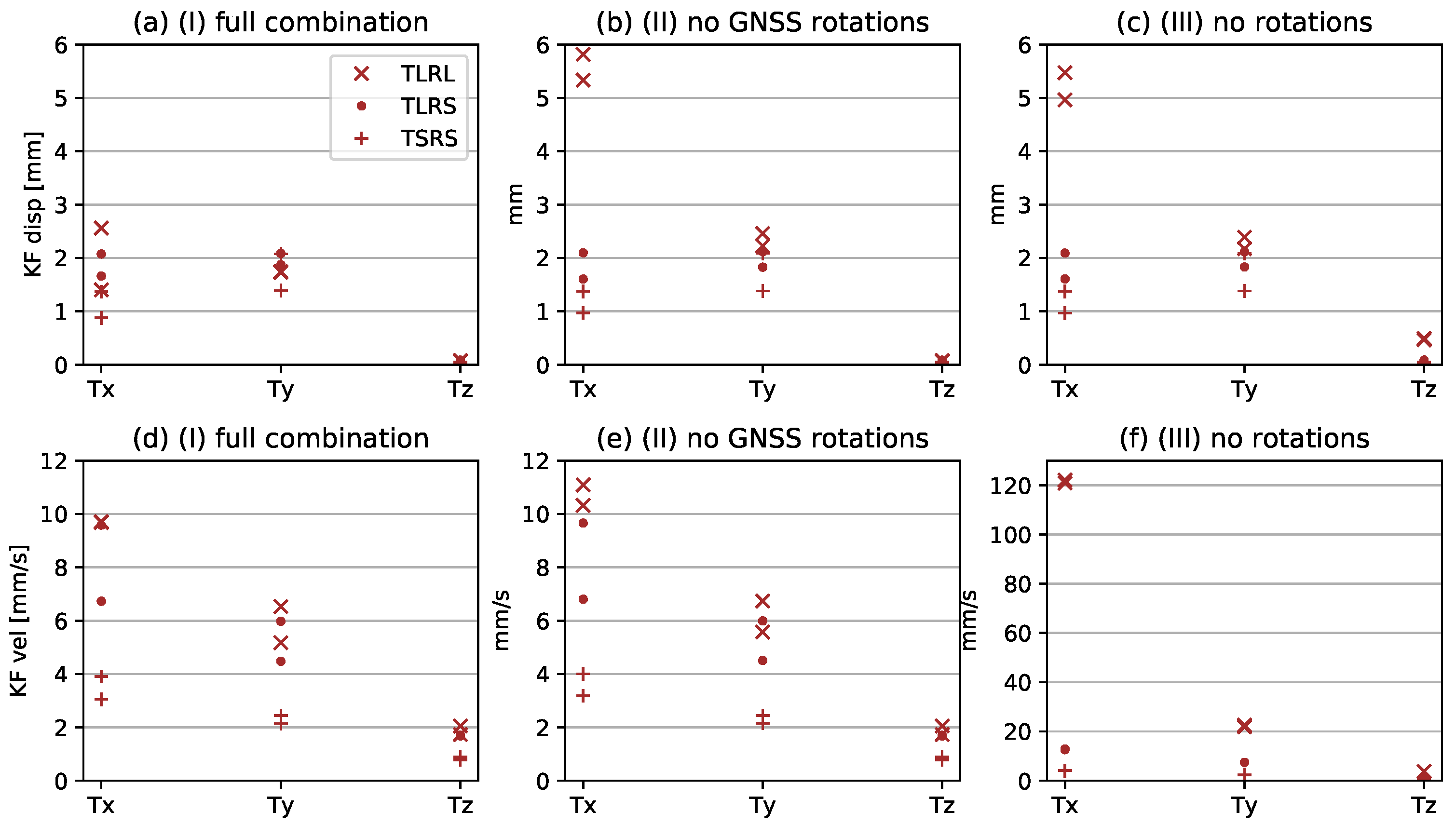
In order to assess the influence the rotations of the two instruments, the accelerometer and the GNSS antenna, have on the KF combination, we perform three different realisations; (
I) full KF combination, including the effect of rotation on both, the GNSS and EpiSensor, (
II) only taking account of rotations on the EpiSensor, ignoring the effect of rotation on the GNSS and (
III) excluding rotation completely. In comparison to (
I), we do not correct for the rotation of the antenna pole in (
II) and Equation (
5) becomes
. In (
III), we set
to zero, which, in practice, results in Equations (
4) and (
5), becoming
and
.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














