
A Quick Start Method for MEMS Disk Resonant Gyroscope


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Architecture and Motion Model of Disk Gyroscope
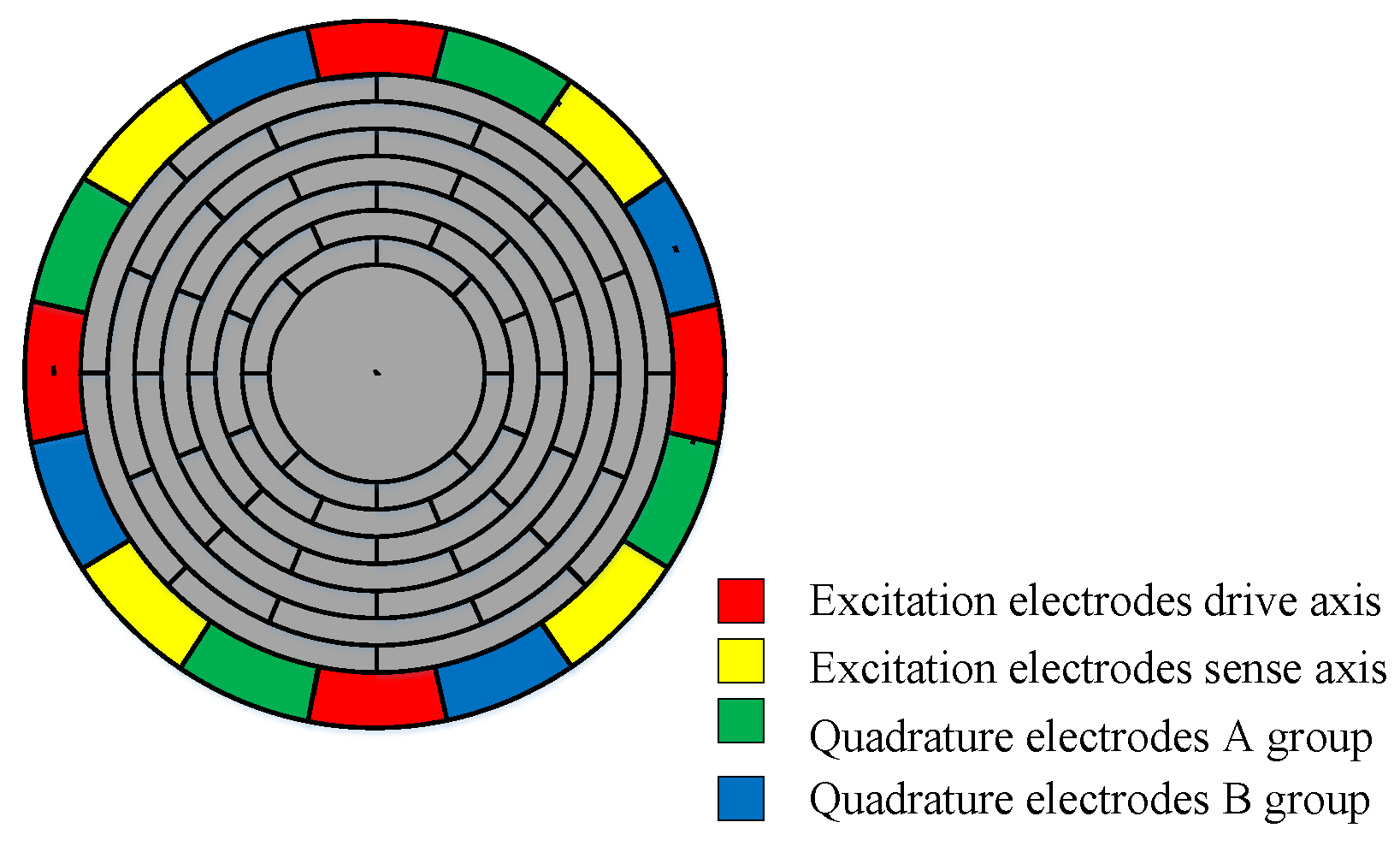
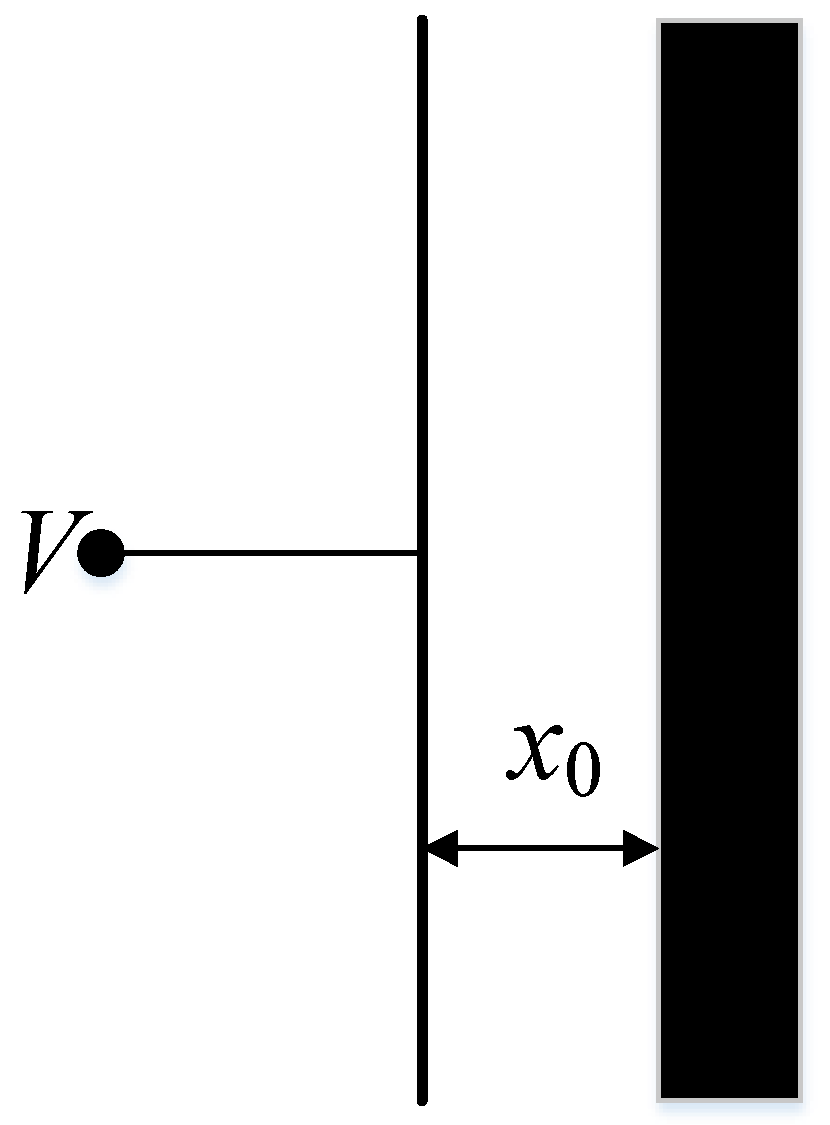
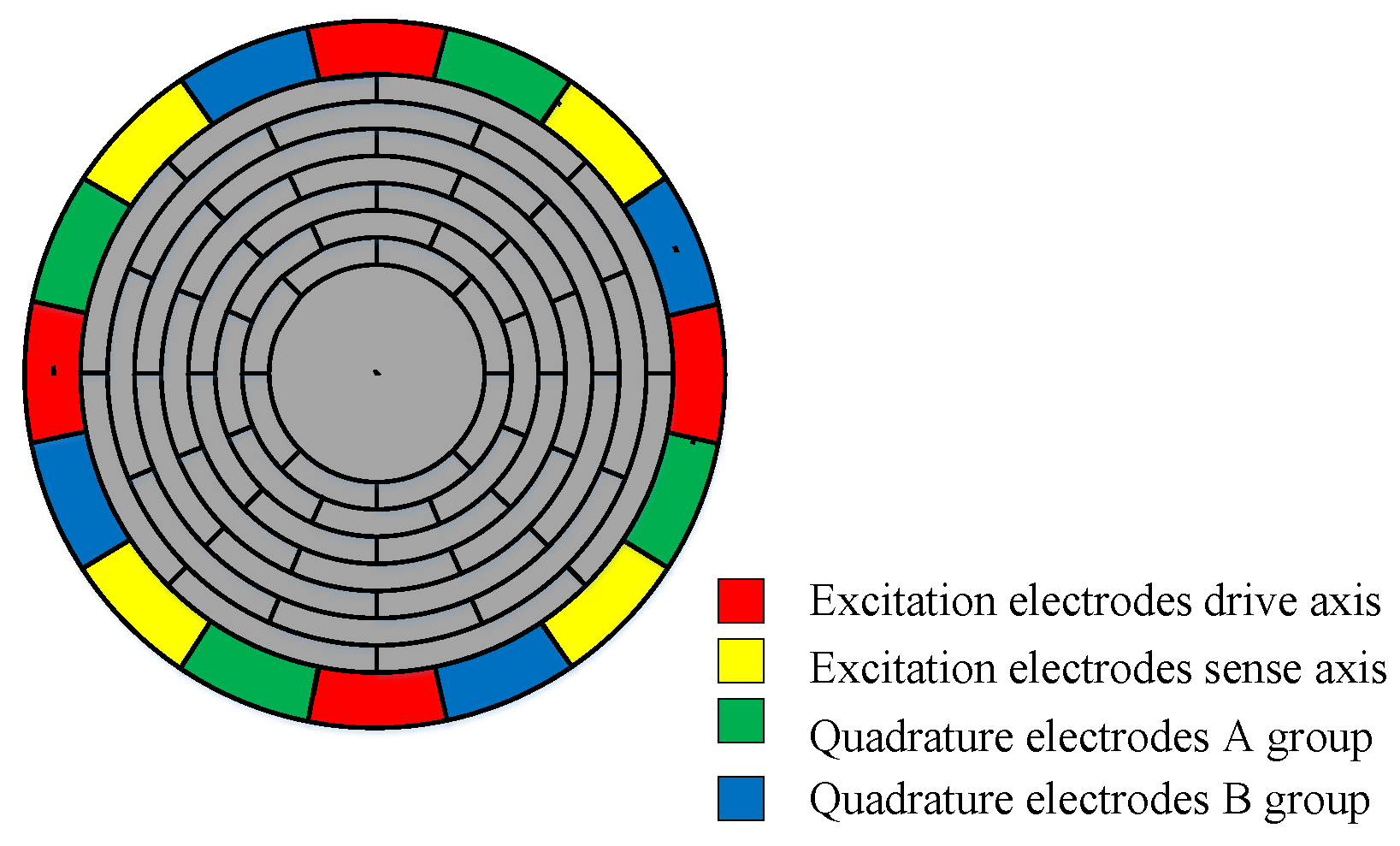
2.1. Basic Structure of Mems Disk Resonator Gyroscope
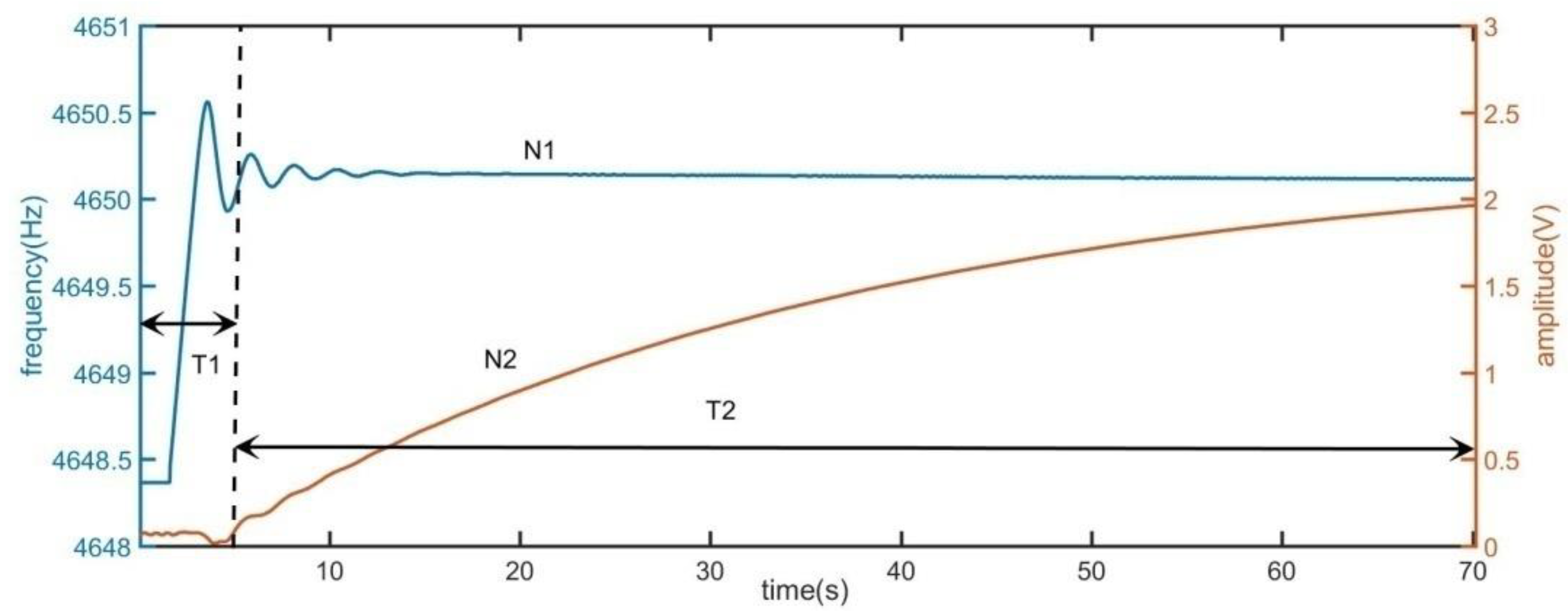
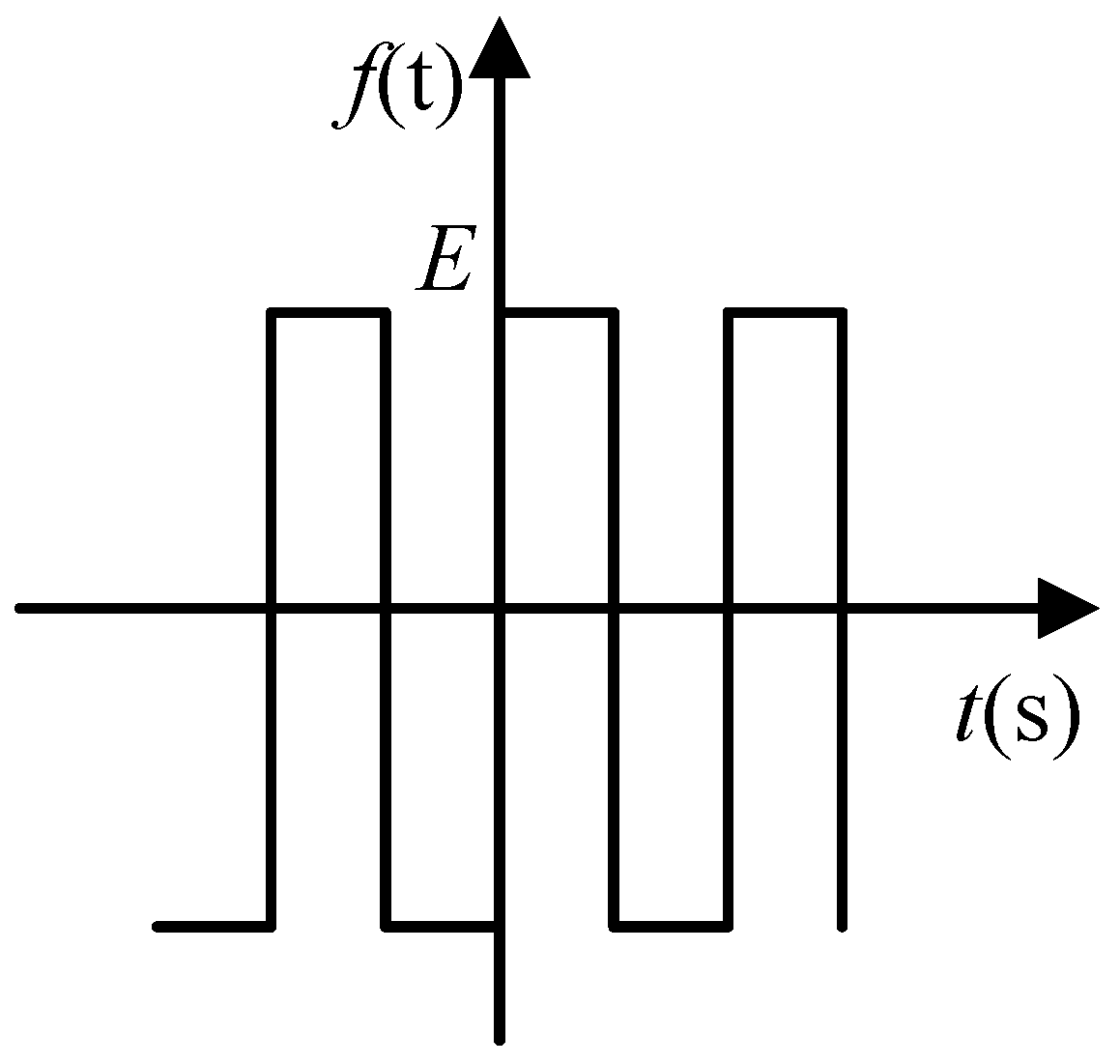
2.2. Analysis of Frequency Locking Characteristics
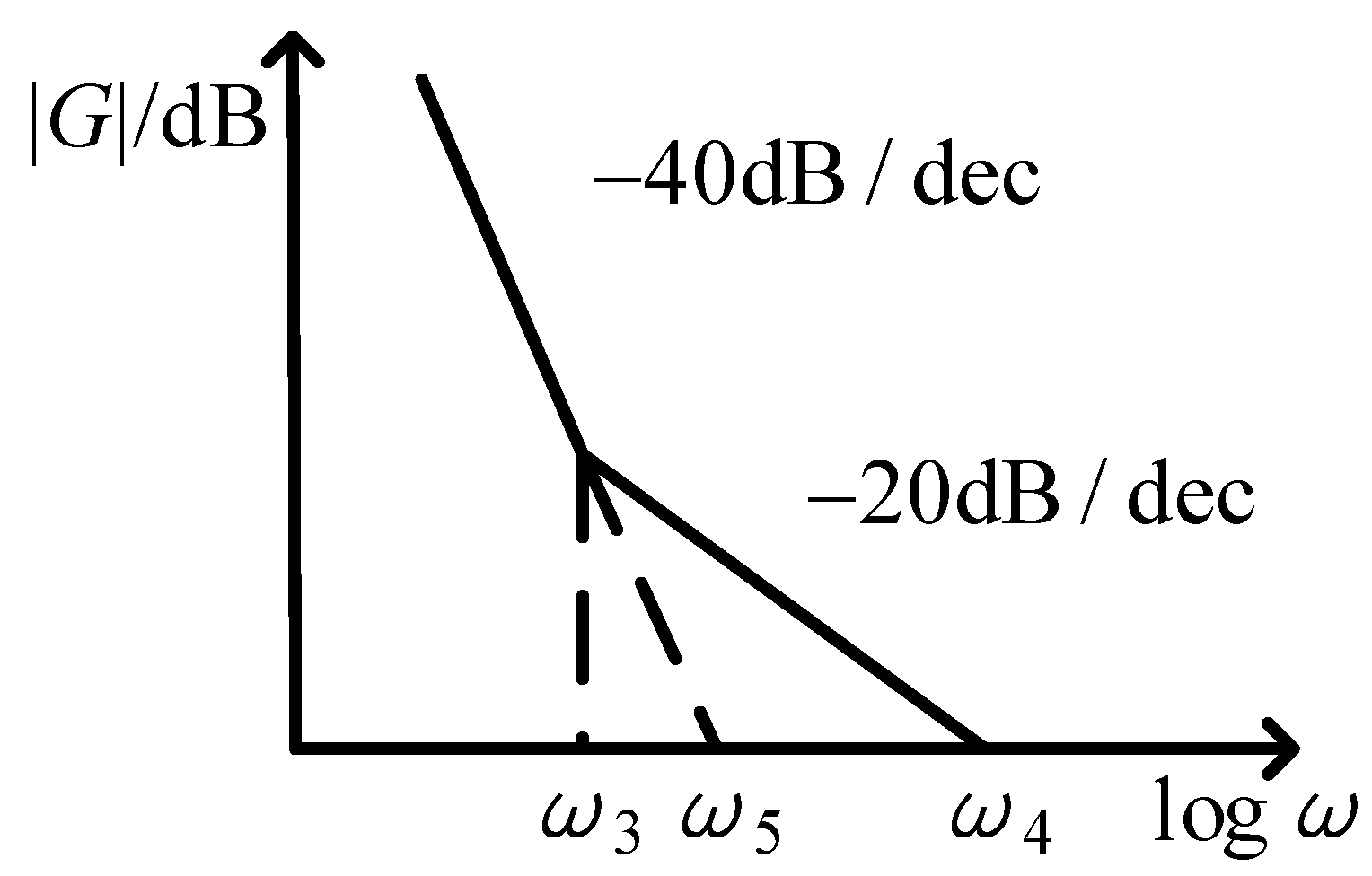
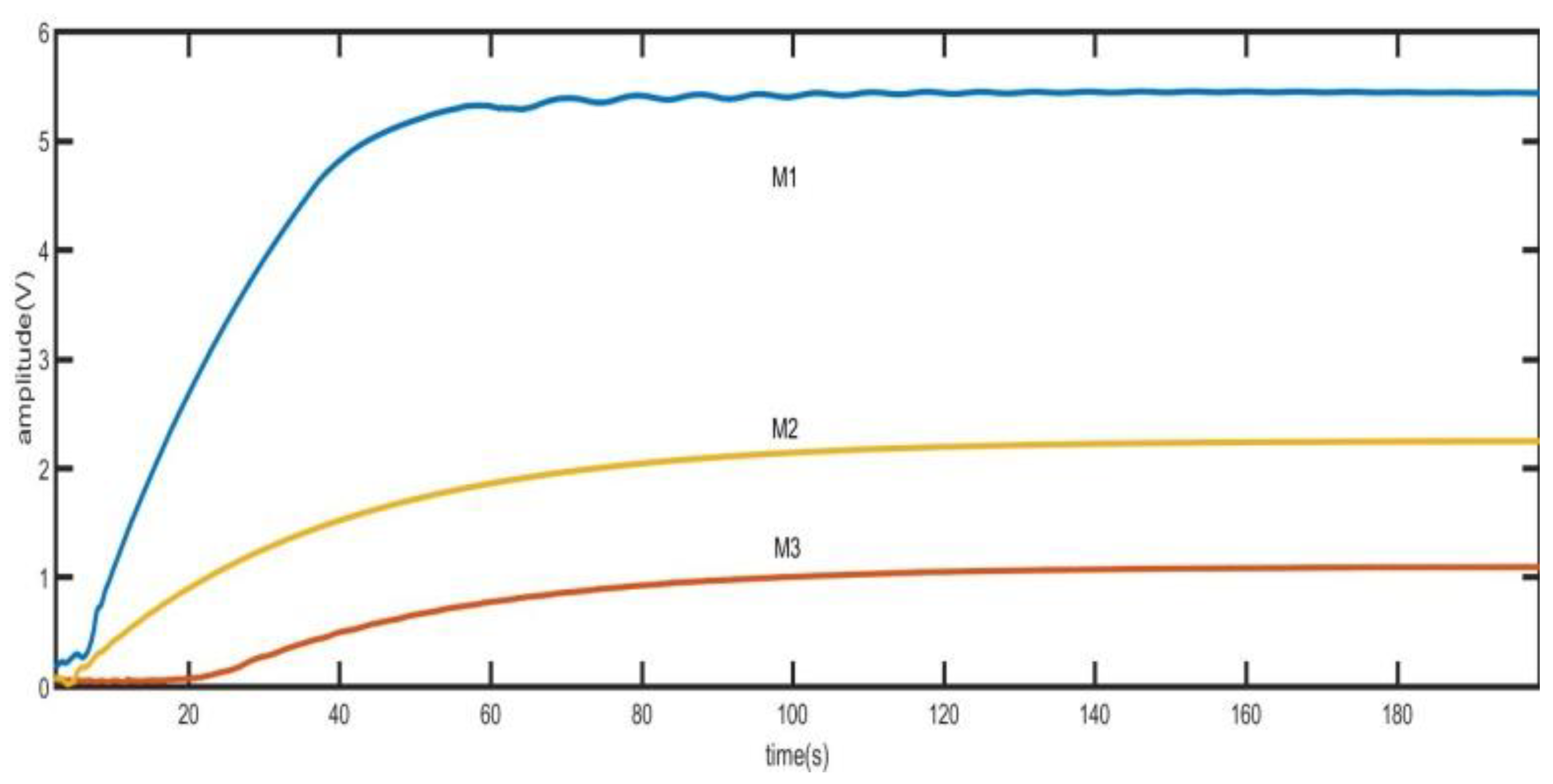
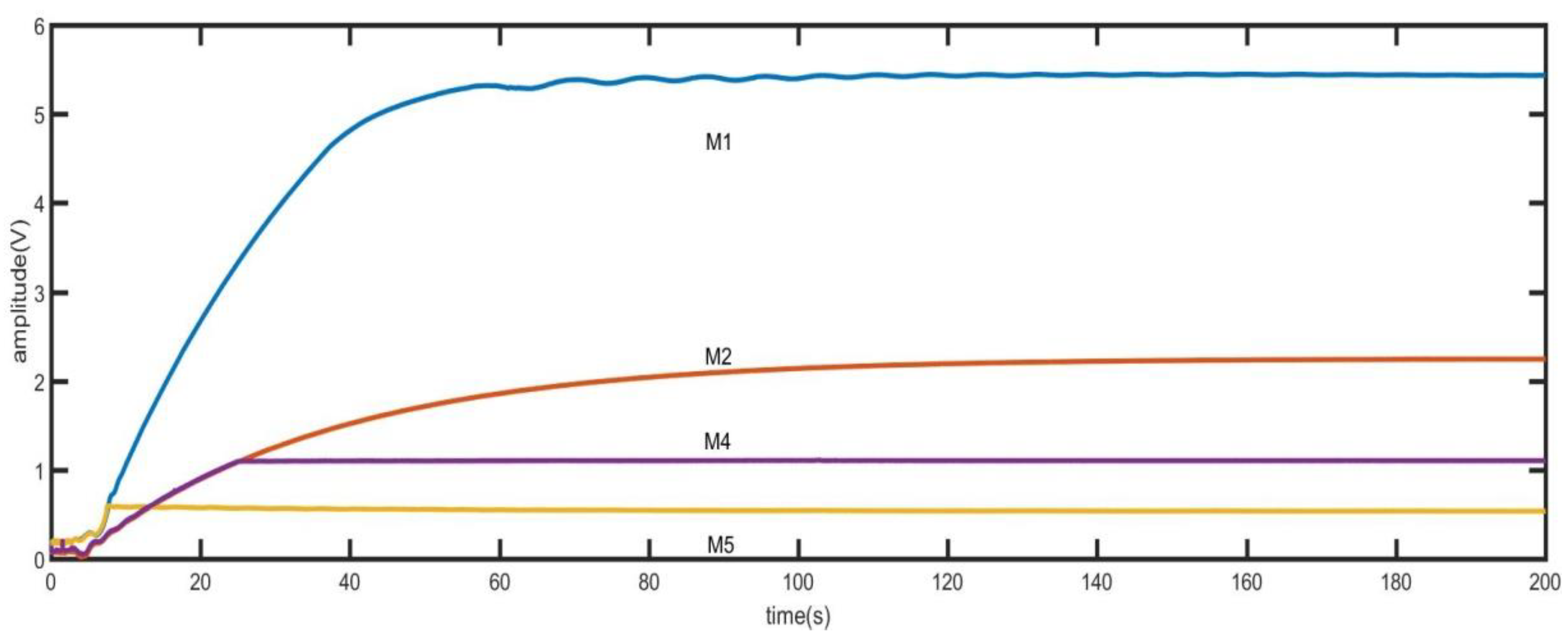
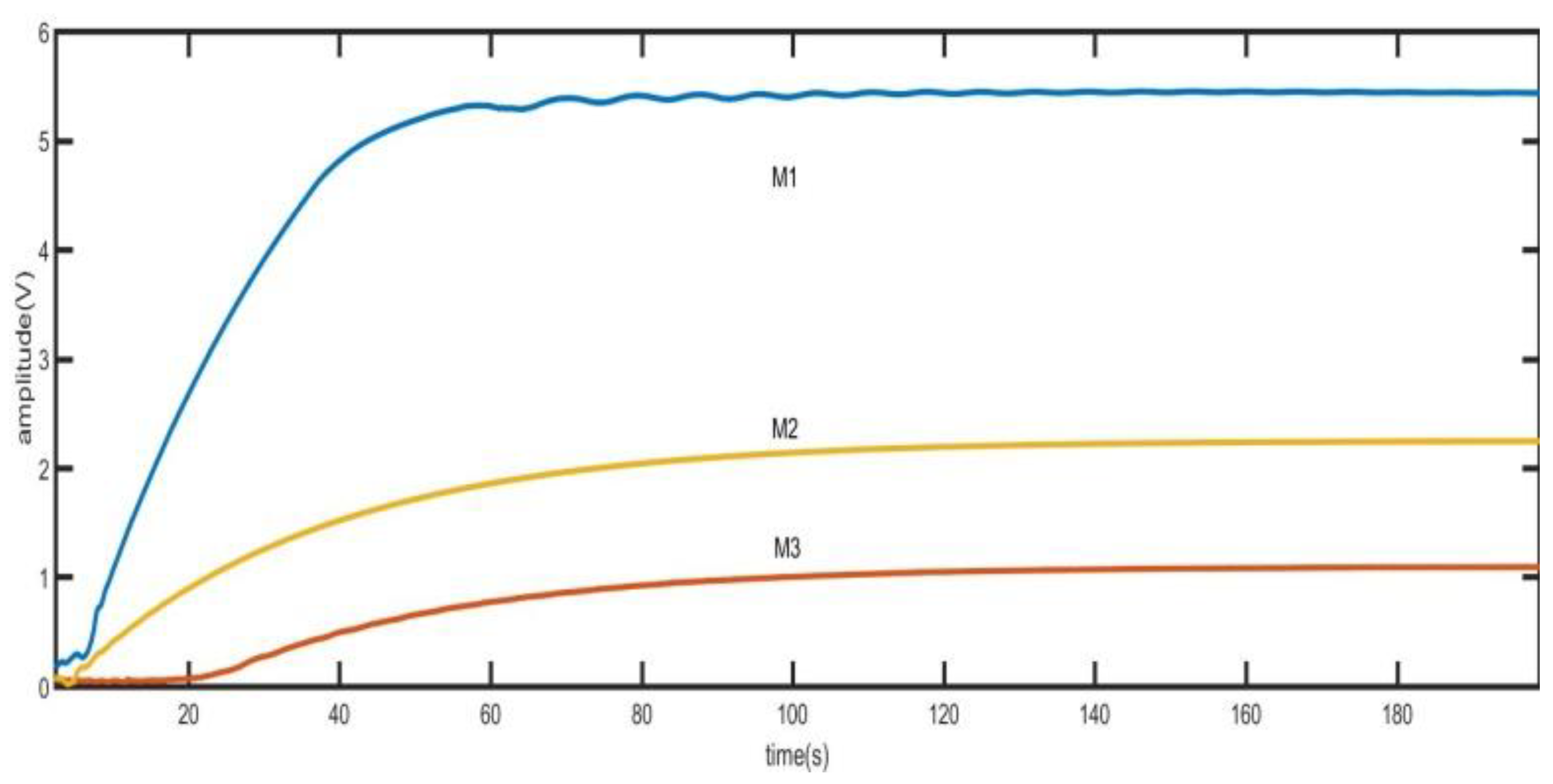
2.3. Analysis of Step Response Characteristics
3. Design of Control System for Quick Start of Driving Mode
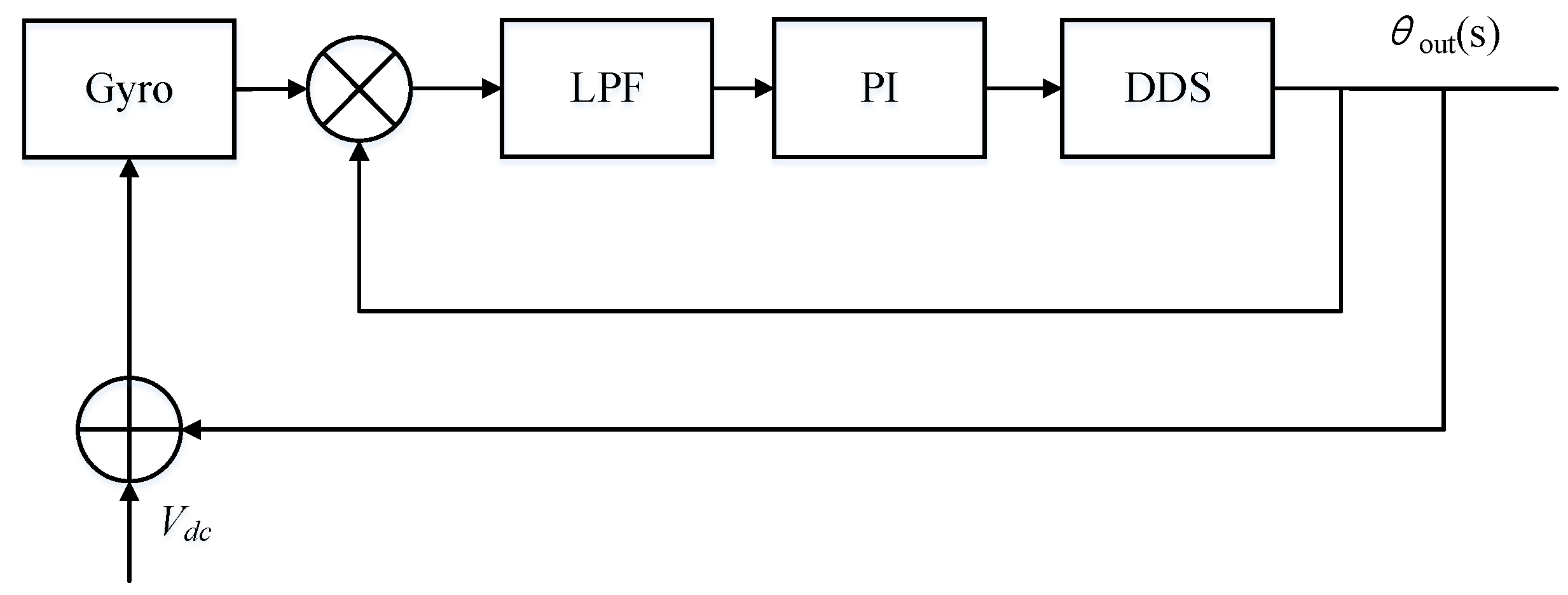
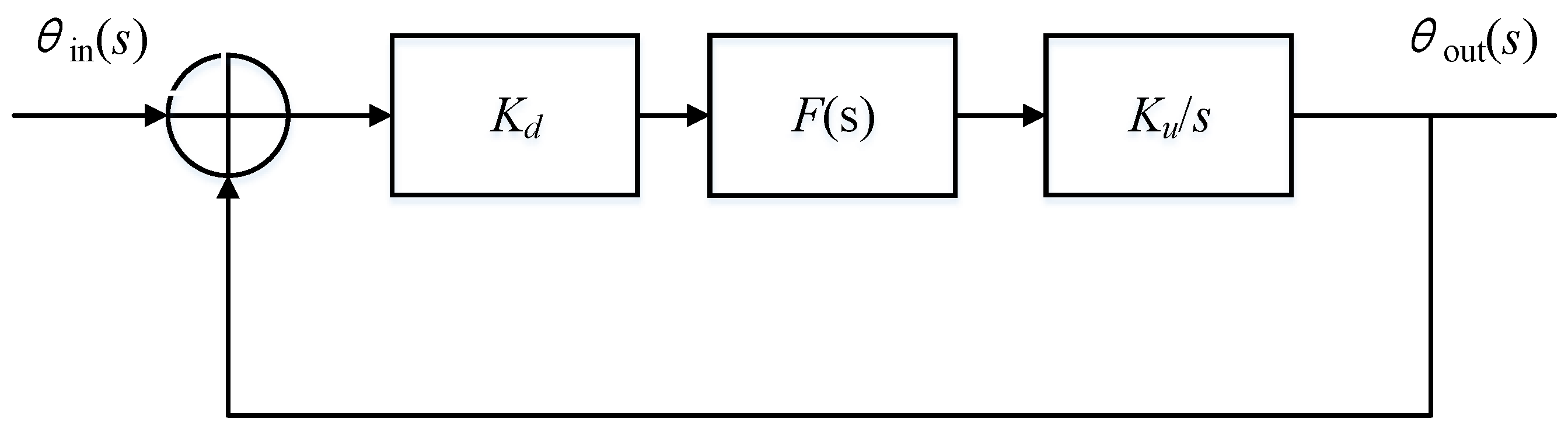
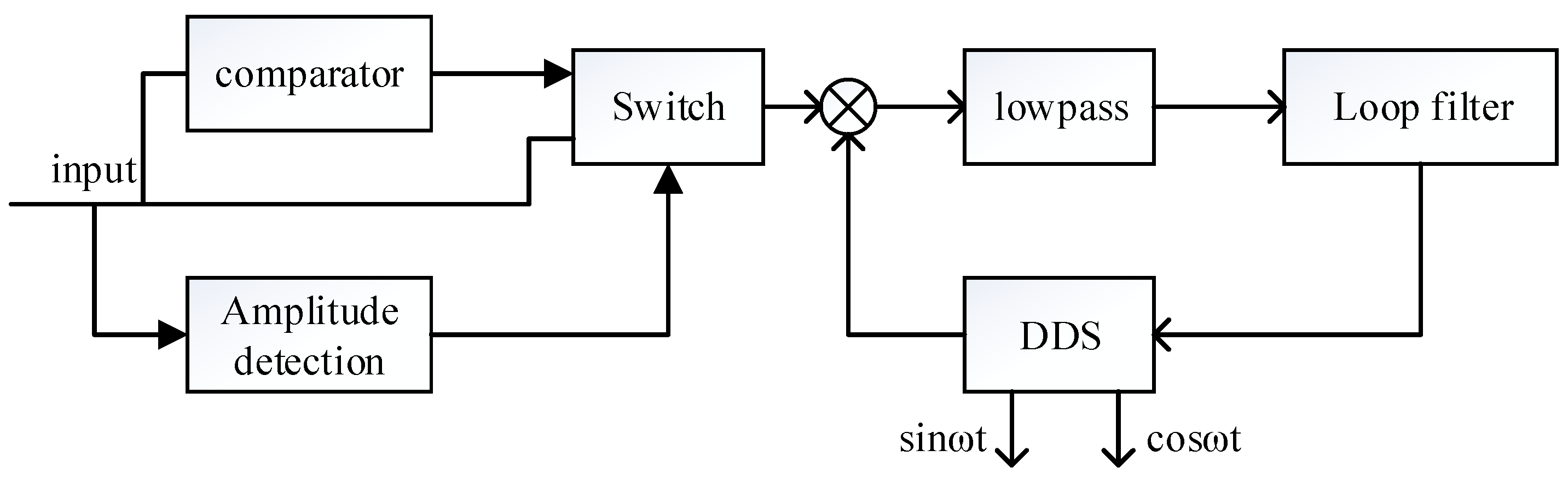
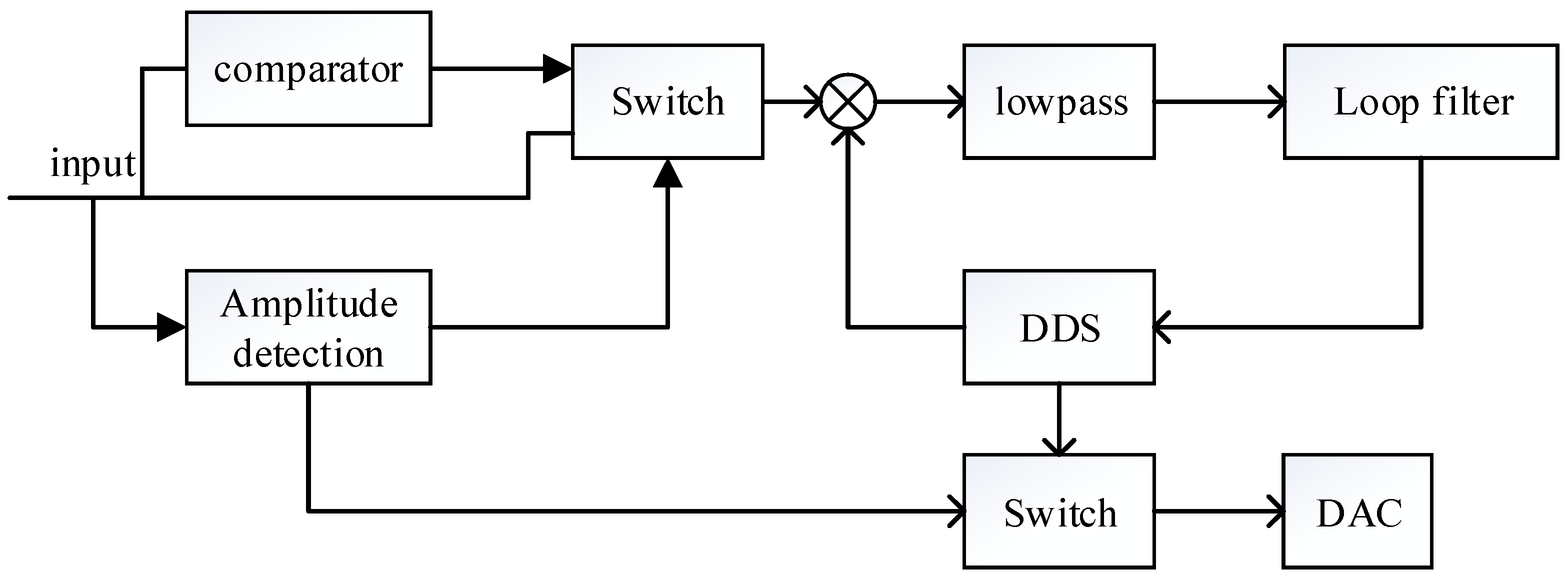
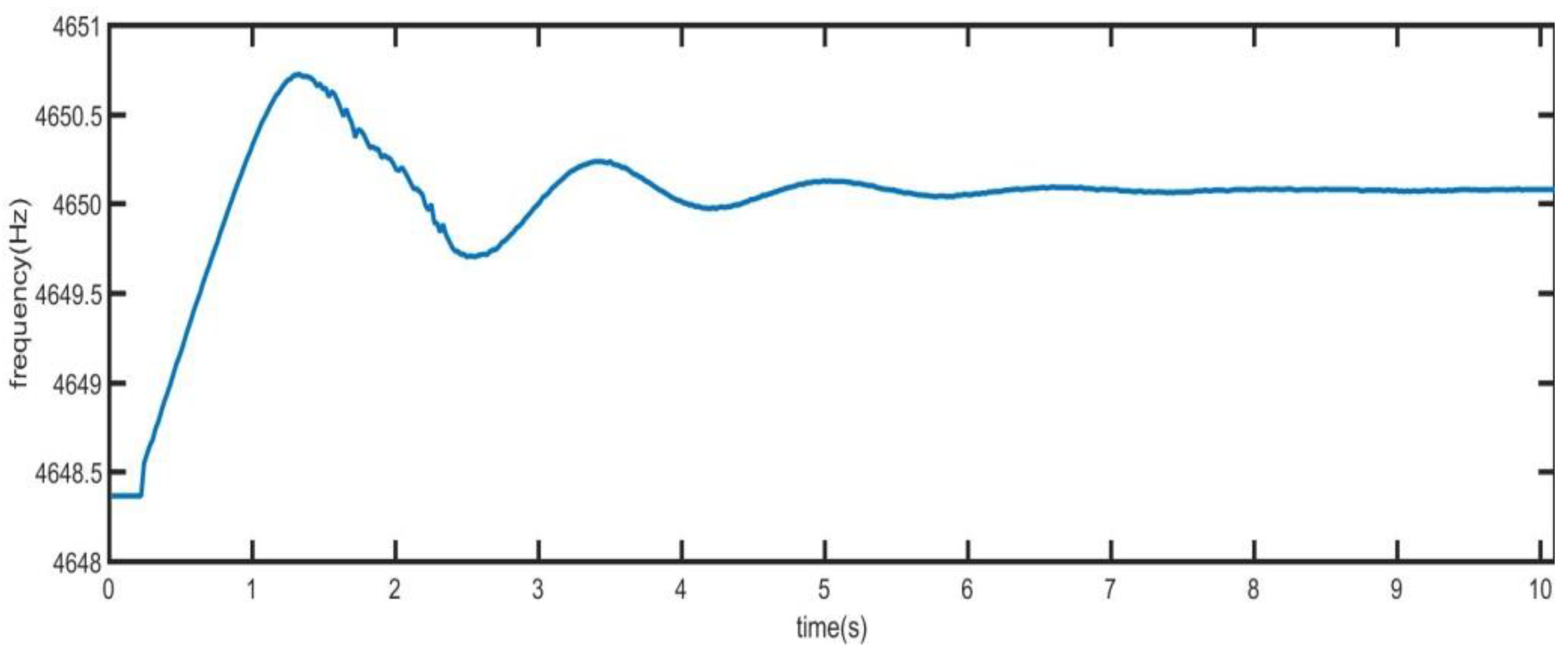
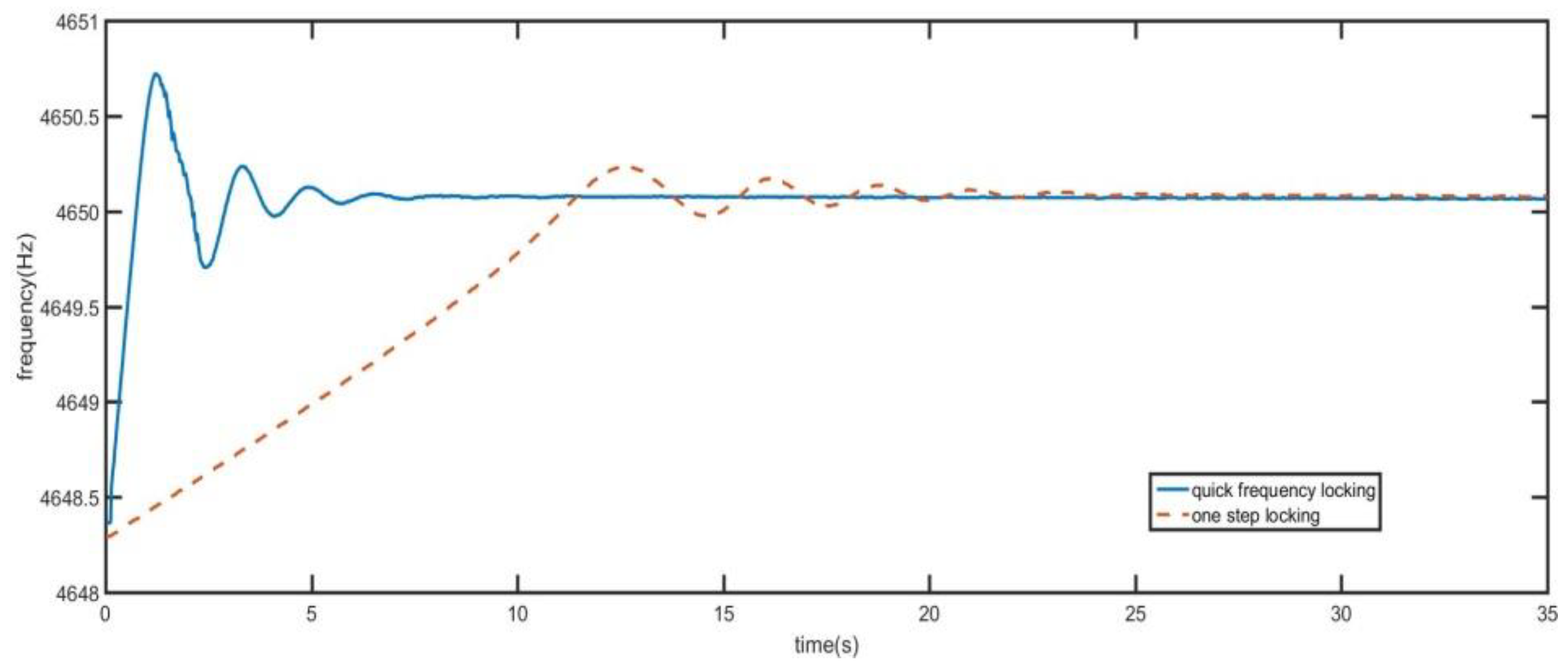
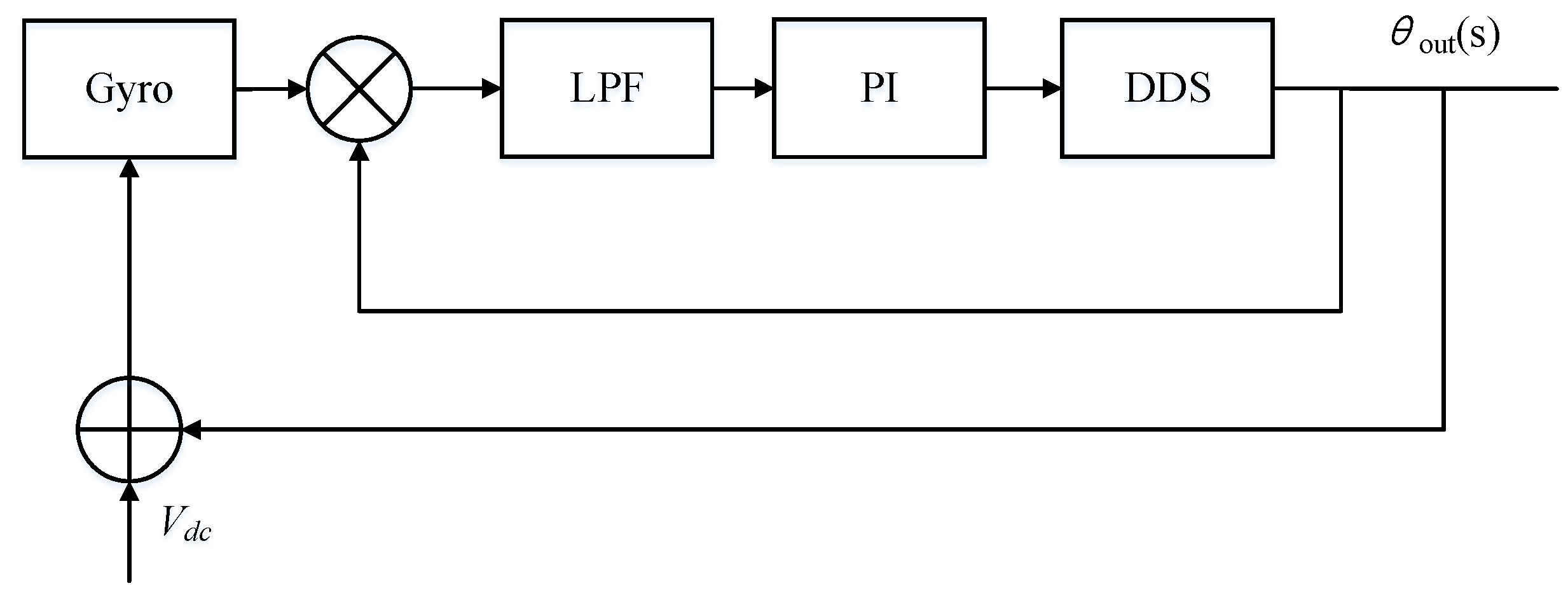
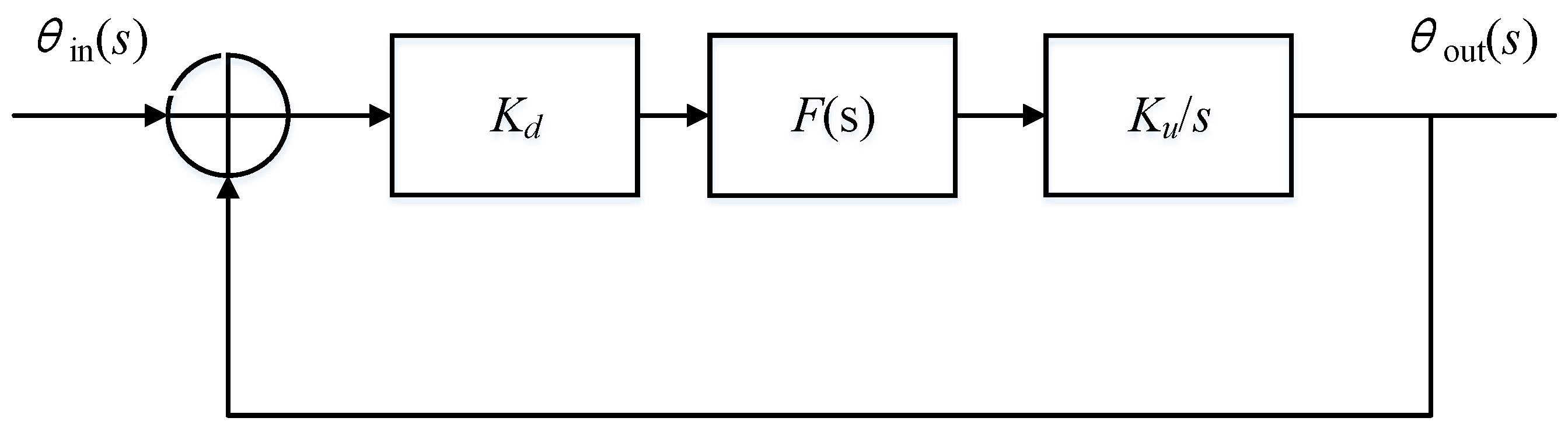
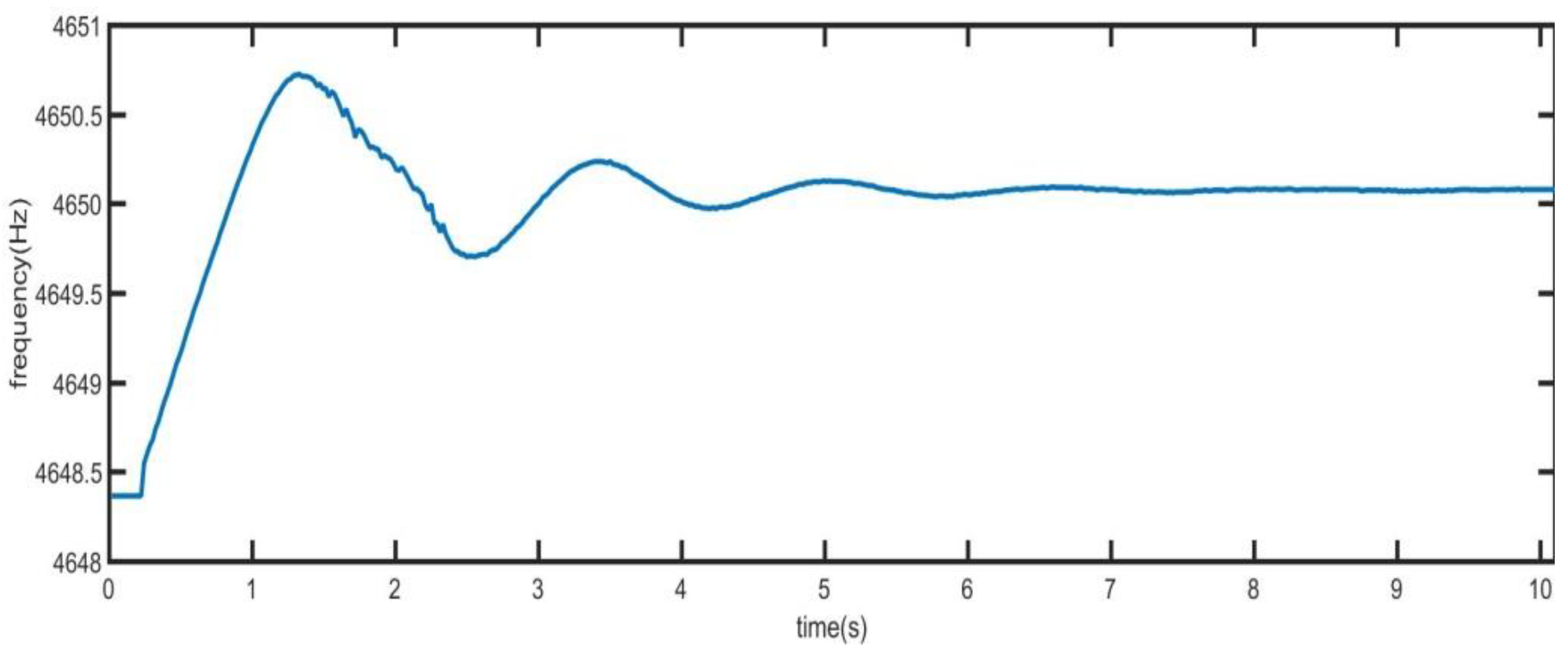
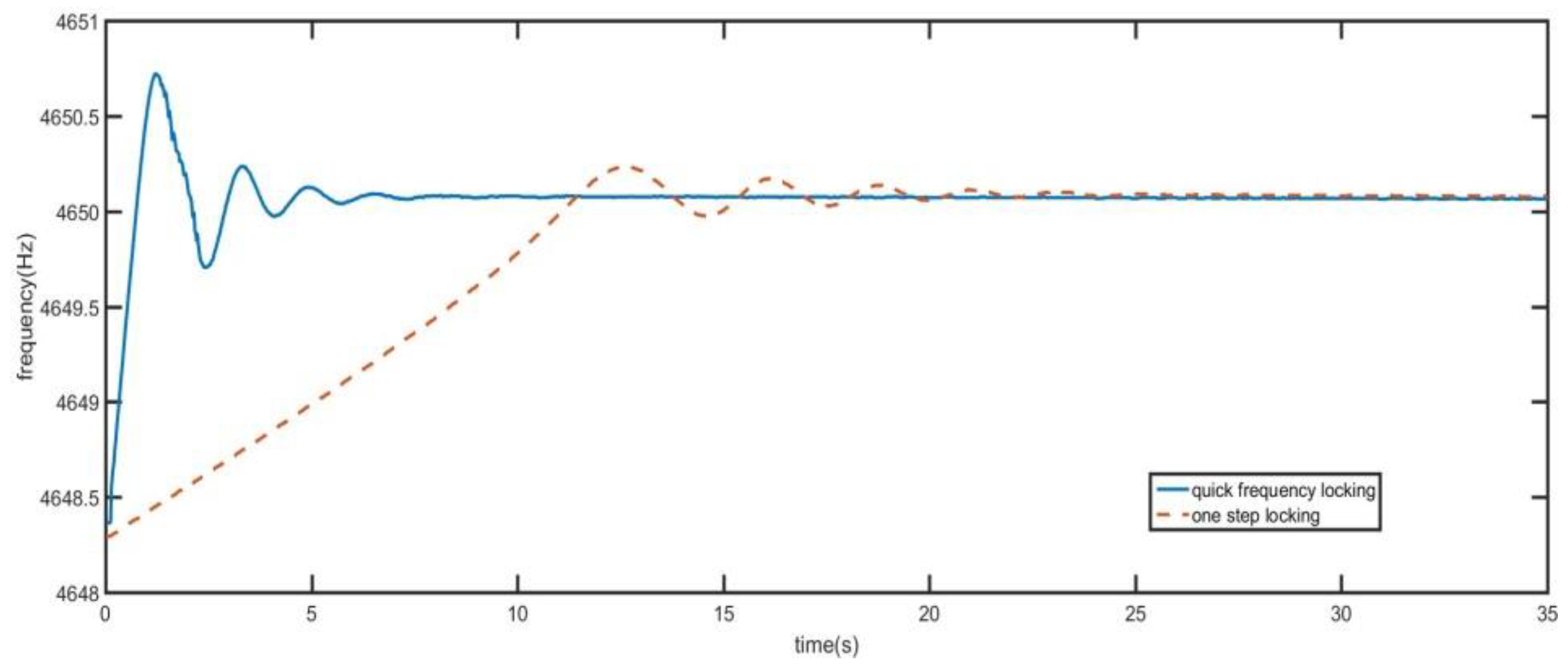
3.1. Design of Quick Frequency Locking Control System
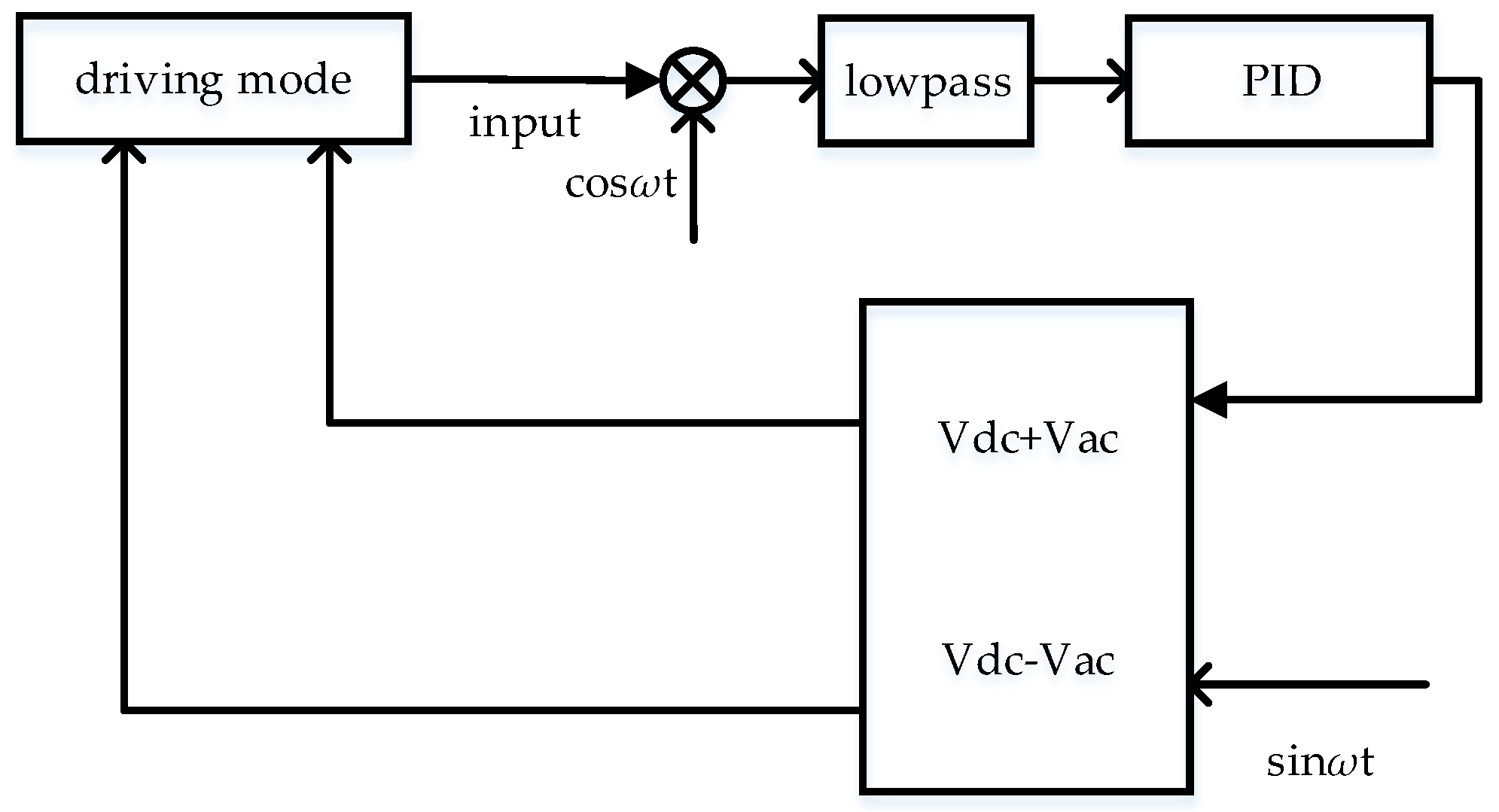
3.2. Design of Quick Step Response Control System
3.3. Control System of Amplitude Stable Loop
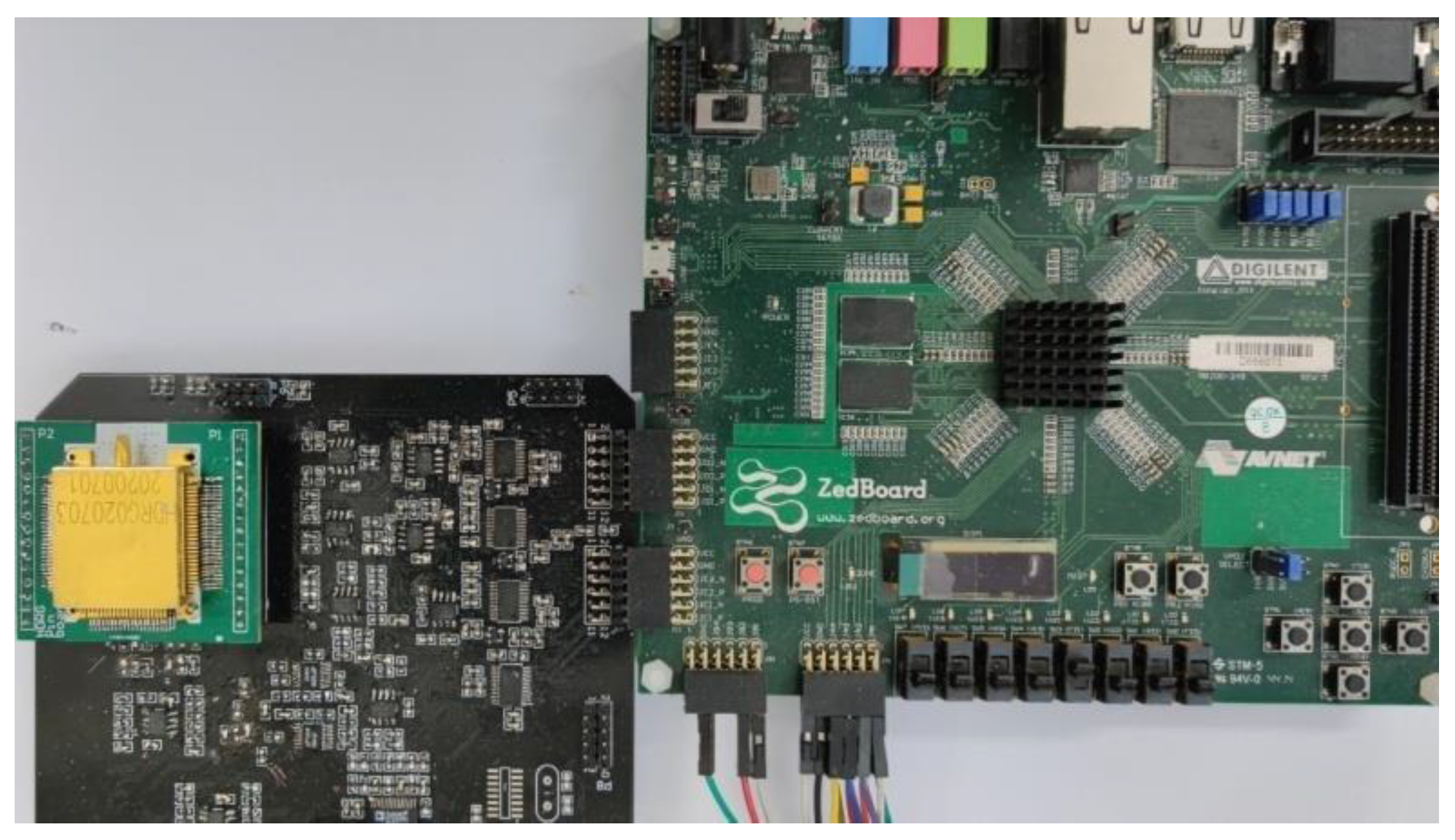
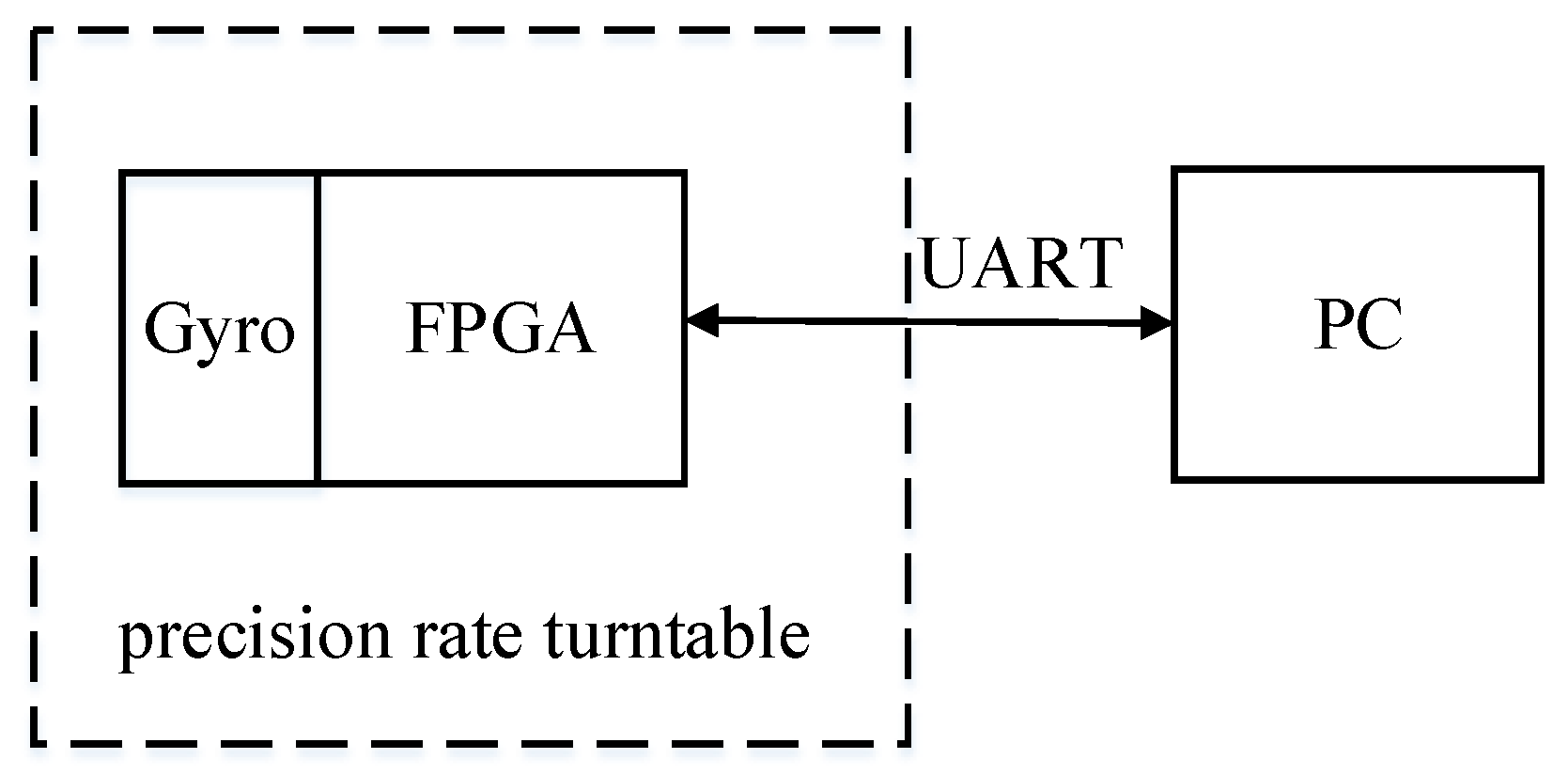
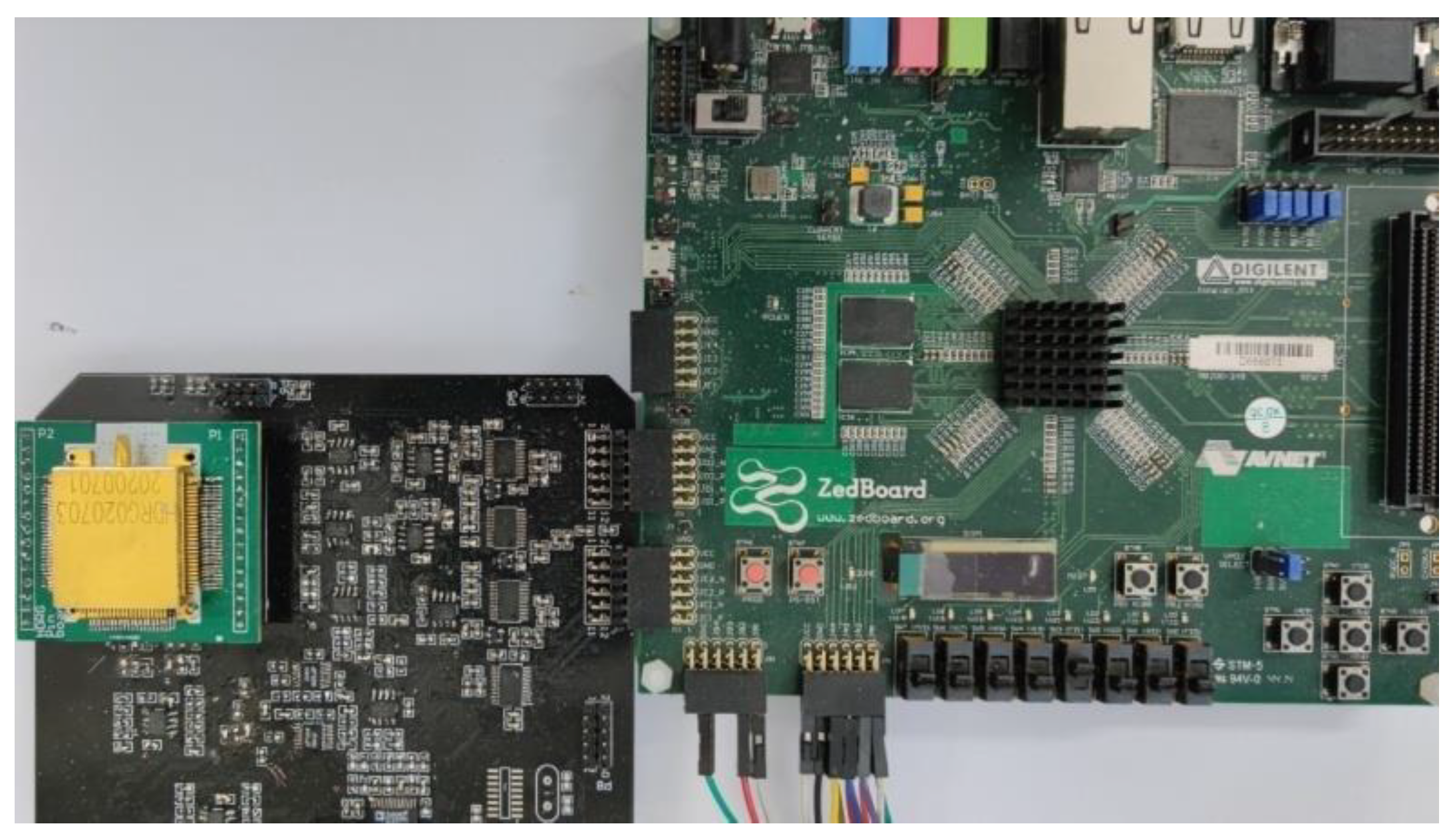
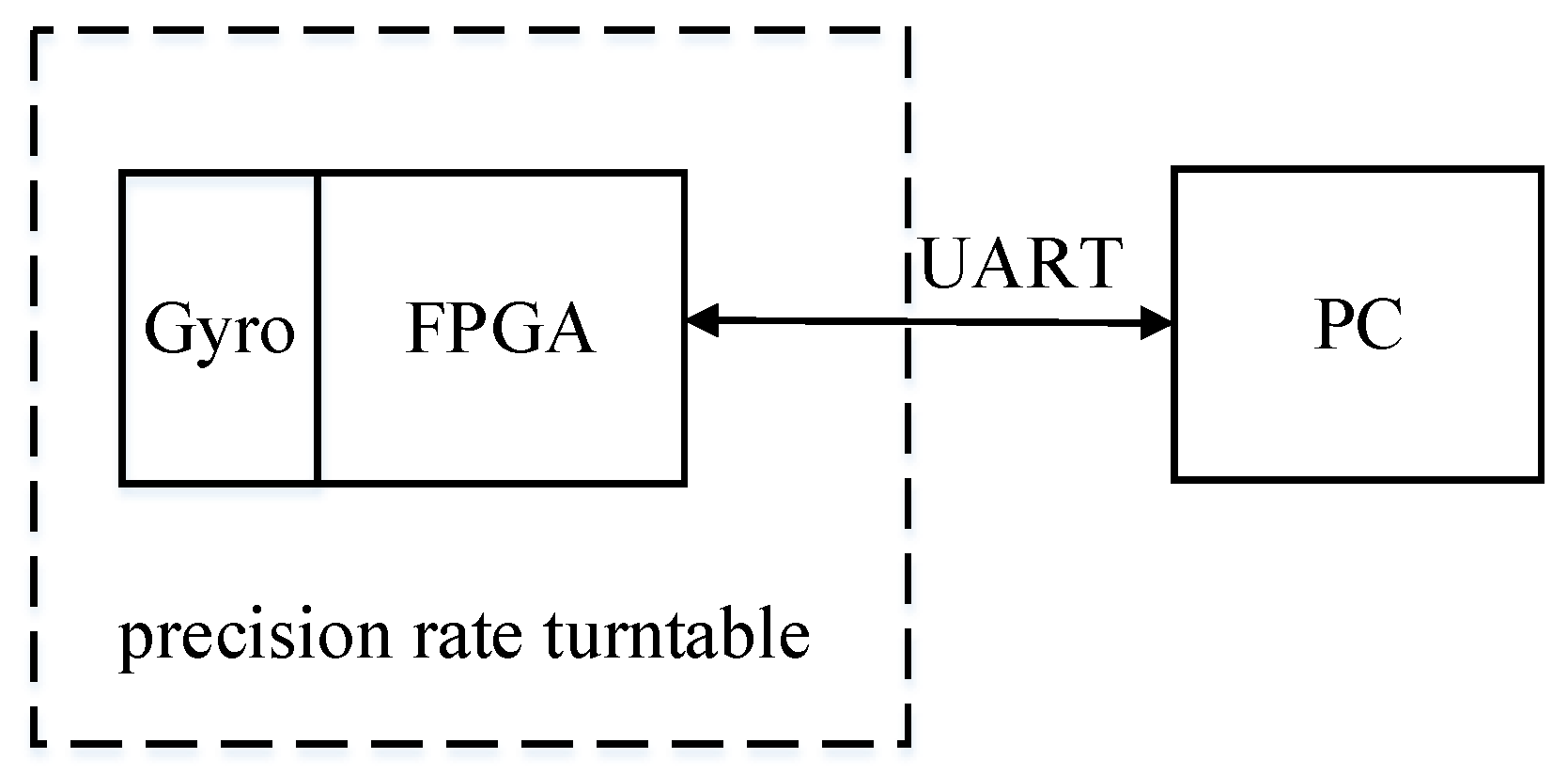
4. Circuit Realization and Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xia, D.; Yu, C.; Kong, L. The Development of Micromachined Gyroscope Structure and Circuitry Technology. Sensors 2014, 14, 1394–1473. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ruan, Z.; Ding, X.; Qin, Z.; Jia, J.; Li, H. Automatic Mode-Matching Method for MEMS Disk Resonator Gyroscopes Based on Virtual Coriolis Force. Micromachines 2020, 11, 210. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, Q.; Hou, Z.; Kuang, Y.; Miao, T.; Ou, F.; Zhuo, M.; Xiao, D.; Wu, X. A Tuning Fork Gyroscope with a Polygon-Shaped Vibration Beam. Micromachines 2019, 10, 813. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ding, X.; Jia, J.; Qin, Z.; Ruan, Z.; Li, H. A Lumped Mass Model for Circular Micro-Resonators in Coriolis Vibratory Gyroscopes. Micromachines 2019, 10, 378. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, Z.; Yi, G.; Meng, J.E.; Chao, H. Effect of Uneven Electrostatic Forces on the Dynamic Characteristics of Capacitive Hemispherical Resonator Gyroscopes. Sensors 2019, 19, 1291. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gu, H.Y.; Su, W.; Zhao, B.L.; Zhou, H.; Liu, X.X. A Design Methodology of Digital Control System for MEMS Gyroscope Based on Multi-Objective Parameter Optimization. Micromachines 2020, 11, 16. [Google Scholar] [CrossRef] [Green Version]
- Hu, Z.; Gallacher, B. A mode-matched force-rebalance control for a MEMS vibratory gyroscope. Sens. Actuators A Phys. 2018, 273, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Passaro, V.M.N.; Antonello, C.; Lorenzo, V.; Martino, D.C.; Edoardo, C.C. Gyroscope Technology and Applications: A Review in the Industrial Perspective. Sensors 2017, 17, 2284. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.; Lin, C.; Yao, Z.; Su, Y. The Model and Damping Analysis of Disk Gyroscope with (100) Single Crystal Silicon. In Proceedings of the 2019 2nd World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Shanghai, China, 22–24 November 2019; pp. 99–102. [Google Scholar] [CrossRef]
- Li, Q.; Xiao, D.; Xu, Y.; Zhuo, M.; Zhou, X.; Zhang, Y.; Yu, L.; Wu, X. Nonlinearity Reduction in Disk Resonator Gyroscopes Based on the Vibration Amplification Effect. ITIE 2020, 67, 6946–6954. [Google Scholar] [CrossRef]
- Song, J.W.; Song, H.M.; Lee, Y.J.; Park, C.G.; Sung, S. Design of Oscillation Control Loop With Coarse-Precision Mode Transition for Solid-State Resonant Gyroscope. IEEE Sens. J. 2016, 16, 1730–1742. [Google Scholar] [CrossRef]
- Hu, Z.X.; Gallacher, B.J.; Burdess, J.S.; Bowles, S.R.; Grigg, H. A systematic approach for precision electrostatic mode tuning of a MEMS gyroscope. J. Micromech. Microeng. 2014, 24, 125003. [Google Scholar] [CrossRef]
- Su, T.-H.; Nitzan, S.H.; Taheri-Tehrani, P.; Kline, M.H.; Boser, B.E.; Horsley, D.A. Silicon MEMS Disk Resonator Gyroscope With an Integrated CMOS Analog Front-End. IEEE Sens. J. 2014, 14, 3426–3432. [Google Scholar] [CrossRef]
- Li, C.; Wen, H.; Wisher, S.; Norouzpour-Shirazi, A.; Lei, J.Y.; Chen, H.; Ayazi, F. An FPGA-Based Interface System for High-Frequency Bulk-Acoustic-Wave Microgyroscopes With In-Run Automatic Mode-Matching. IEEE Trans. Instrum. Meas. 2020, 69, 1783–1793. [Google Scholar] [CrossRef]
- Lee, J.; Yun, S.W.; Rhim, J. Design and Verification of a Digital Controller for a 2-Piece Hemispherical Resonator Gyroscope. Sensors 2016, 16, 555. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aaltonen, L.; Saukoski, M.; Halonen, K. Fully integrated charge pump for high voltage excitation of a bulk micromachined gyroscope. In Proceedings of the 2005 IEEE International Symposium on Circuits and Systems, Kobe, Japan, 23–26 May 2005; Volume 5386, pp. 5381–5384. [Google Scholar]
- Bing, M.; Liu, X.; Ding, X.; Tan, X. A Novel Closed-loop Drive Circuit for the Micromechined Gyroscope. In Proceedings of the International Conference on Mechatronics & Automation, Harbin, China, 5–8 August 2007. [Google Scholar]
- Fan, B.; Guo, S.; Cheng, M.; Yu, L.; Zhou, M.; Hu, W.; Zheng, F.; Bu, F.; Xu, D. Frequency Symmetry Comparison of Cobweb-Like Disk Resonator Gyroscope With Ring-Like Disk Resonator Gyroscope. IEEE Electron Device Lett. 2019, 40, 1515–1518. [Google Scholar] [CrossRef]
- Xin, Z.; Xiao, D.; Li, Q.; Hou, Z.; Wu, X. Decaying Time Constant Enhanced MEMS Disk Resonator for High Precision Gyroscopic Application. IEEE/ASME Trans. Mechatron. 2018, 23, 452–458. [Google Scholar]
- Xiao, D.; Yu, D.; Xin, Z.; Hou, Z.; He, H.; Wu, X. Frequency Tuning of a Disk Resonator Gyroscope via Stiffness Perturbation. IEEE Sens. J. 2017, 17, 4725–4734. [Google Scholar] [CrossRef]
- Xia, D.; Huang, L.; Lei, X.; Gao, H. Structural Analysis of Disk Resonance Gyroscope. Micromachines 2017, 8, 296. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Taheri-Tehrani, P.; Izyumin, O.; Izyumin, I.; Ahn, C.H.; Horsley, D.A. Disk resonator gyroscope with whole-angle mode operation. In Proceedings of the IEEE International Symposium on Inertial Sensors & Systems, Hapuna Beach, HI, USA, 23–26 March 2015. [Google Scholar]
- Challoner, A.D.; Ge, H.H.; Liu, J.Y. Boeing Disc Resonator Gyroscope. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Liu, X.; Zhang, Y. A Quick Start Method for MEMS Disk Resonant Gyroscope. Sensors 2021, 21, 7986. https://doi.org/10.3390/s21237986
Xu X, Liu X, Zhang Y. A Quick Start Method for MEMS Disk Resonant Gyroscope. Sensors. 2021; 21(23):7986. https://doi.org/10.3390/s21237986
Chicago/Turabian StyleXu, Xiaodong, Xiaowei Liu, and Yufeng Zhang. 2021. "A Quick Start Method for MEMS Disk Resonant Gyroscope" Sensors 21, no. 23: 7986. https://doi.org/10.3390/s21237986
APA StyleXu, X., Liu, X., & Zhang, Y. (2021). A Quick Start Method for MEMS Disk Resonant Gyroscope. Sensors, 21(23), 7986. https://doi.org/10.3390/s21237986