Dependable Sensor Fault Reconstruction in Air-Path System of Heavy-Duty Diesel Engines





Abstract
:1. Introduction
- A diesel engine air-path system is studied completely, and by considering the sensor faults and disturbances which can affect the system, a complete model of the air-path system is presented.
- The nonlinear discontinuous term causes chattering of fault reconstruction, while proper higher-order sliding mode observer can weaken this problem. A higher-order sliding mode observer can also eliminate the deviation from true states and fault reconstruction in the presence of disturbances. Therefore, in the next step, a second-order sliding mode observer is designed.
- Although this paper’s approach is developed for a diesel engine air-path system, it can be broadened to other industrial processes and applications for reconstructing various possible faults in the presence of disturbances.
2. Diesel Engine Air-Path Modeling
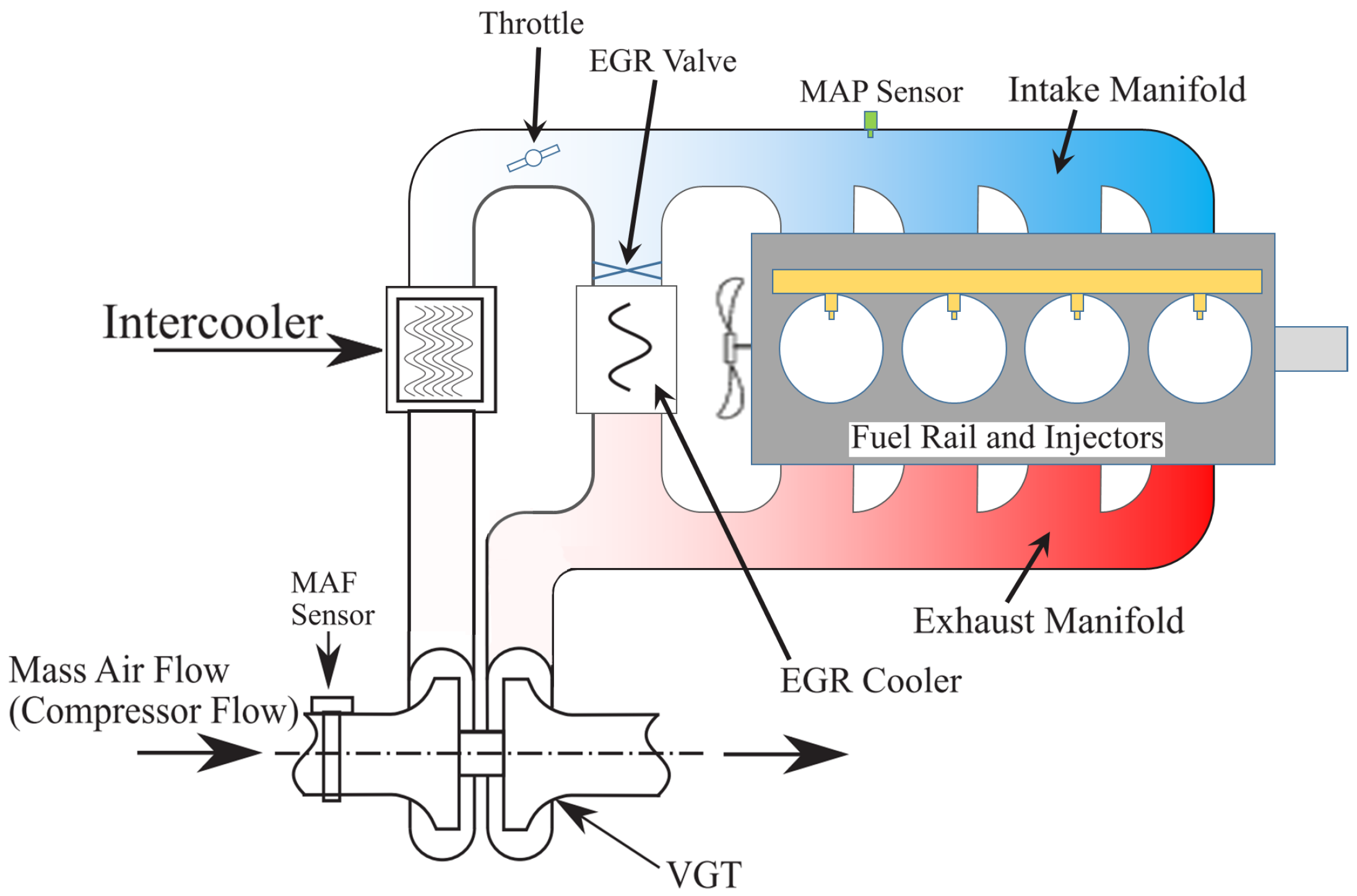
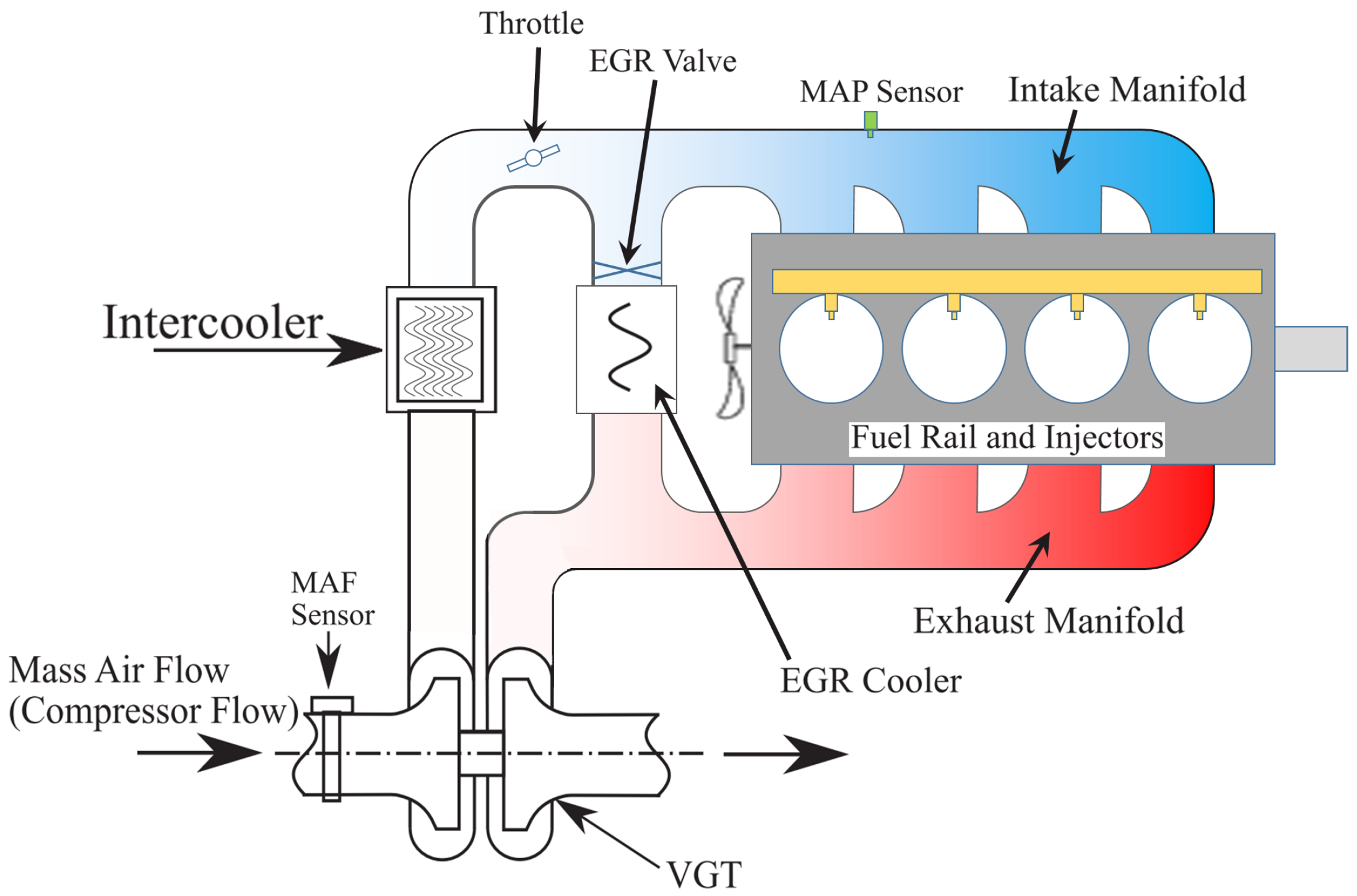
2.1. Diesel Engine Overview
2.2. Manifold Modeling
2.3. Turbocharger Speed Modeling
2.4. EGR Mass Flow Modeling
2.5. Cylinder Flow Modeling
2.6. Unified Model of a Diesel Engine Air-Path
2.7. Disturbance and Sensor Fault Modeling
3. Sensor Fault Reconstruction Using Second-Order Sliding Mode Observer
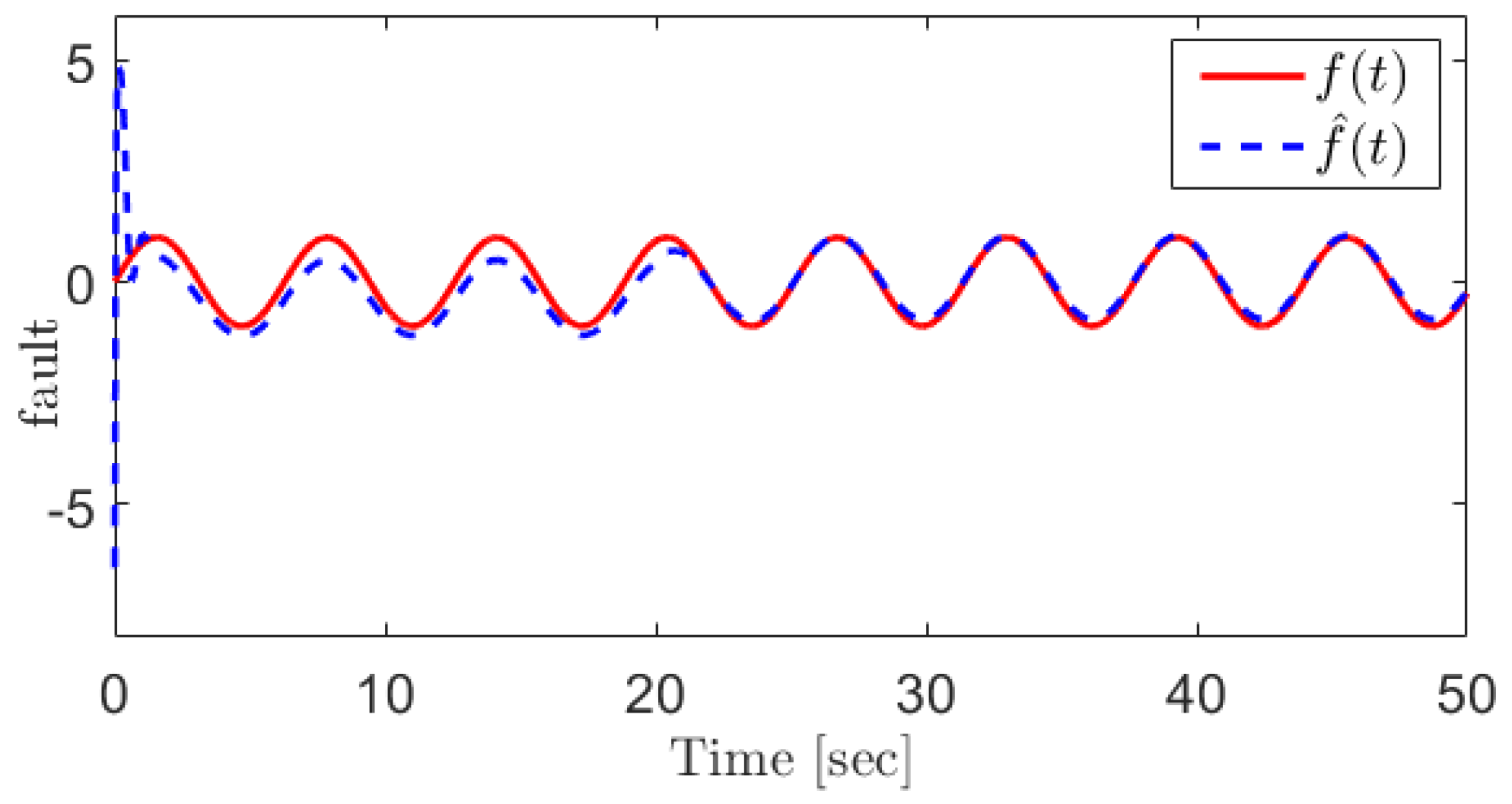
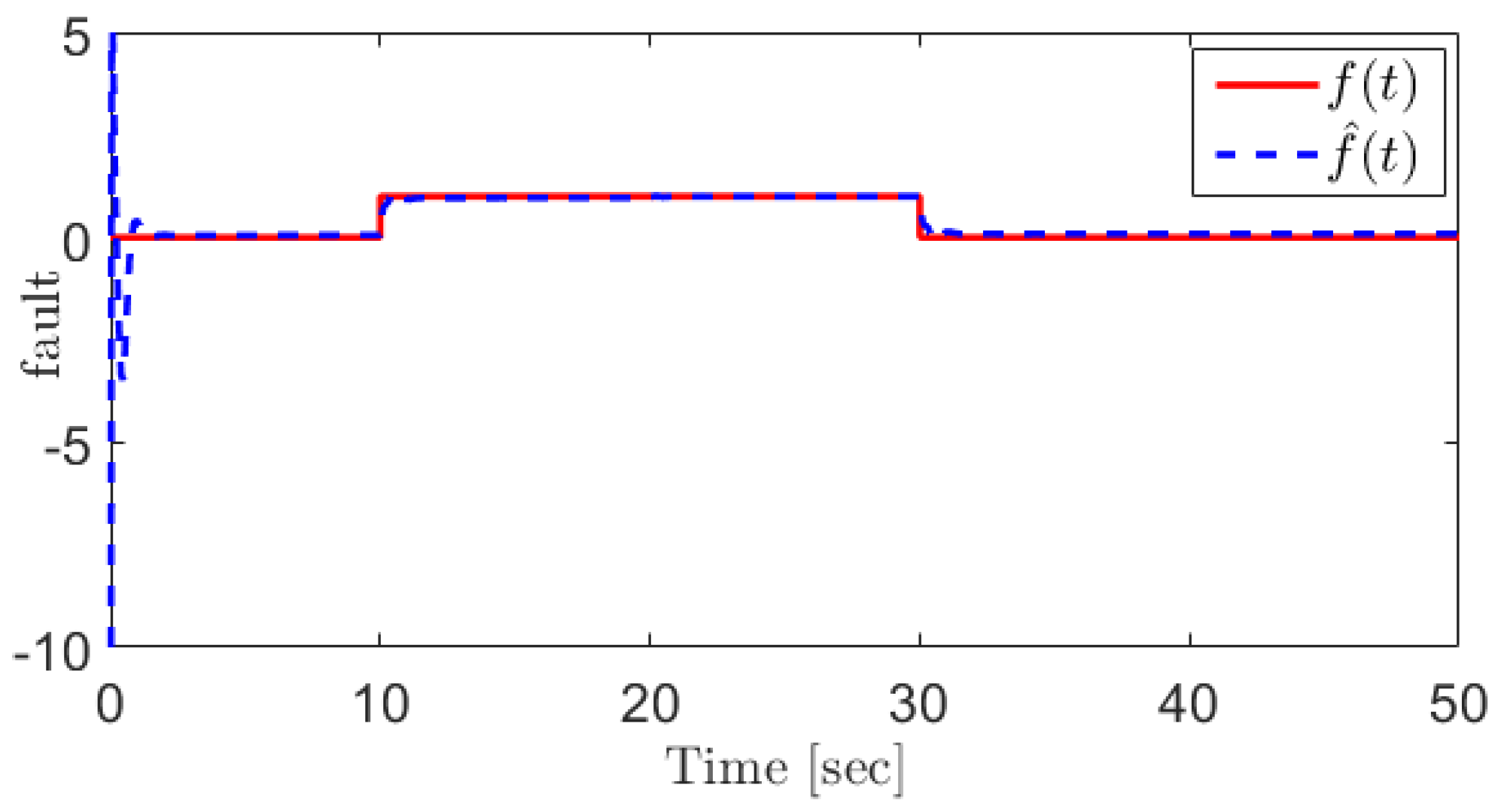
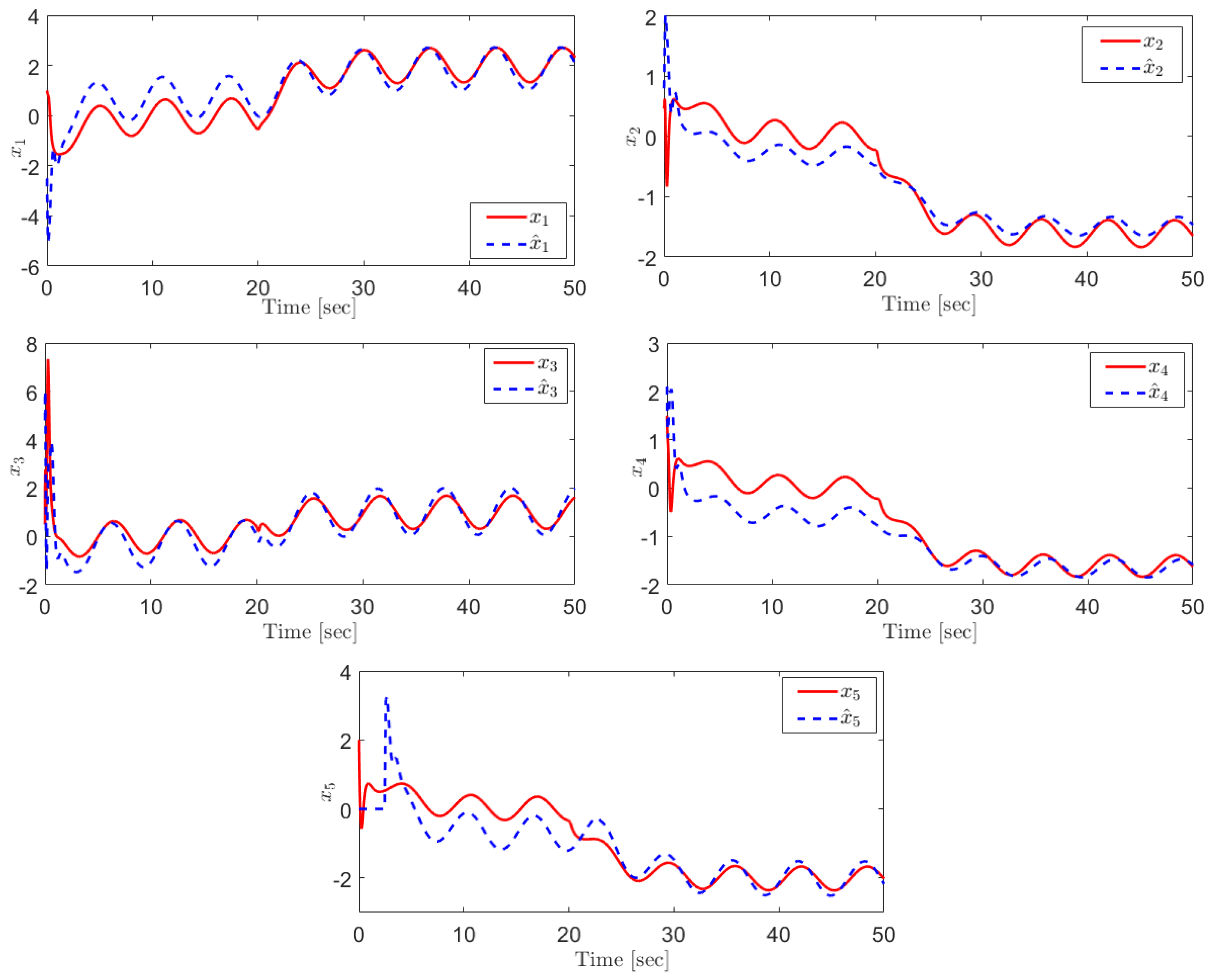
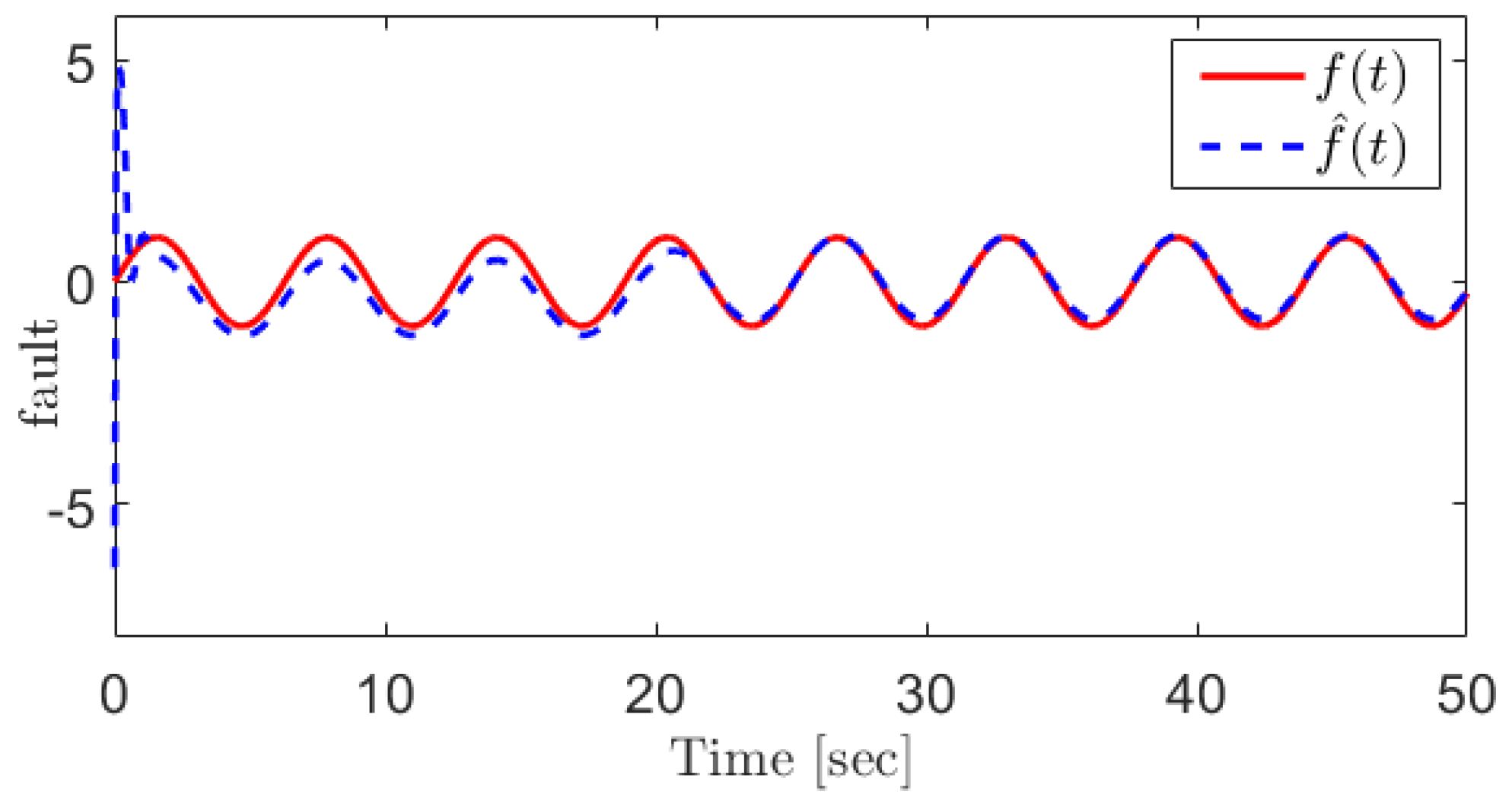
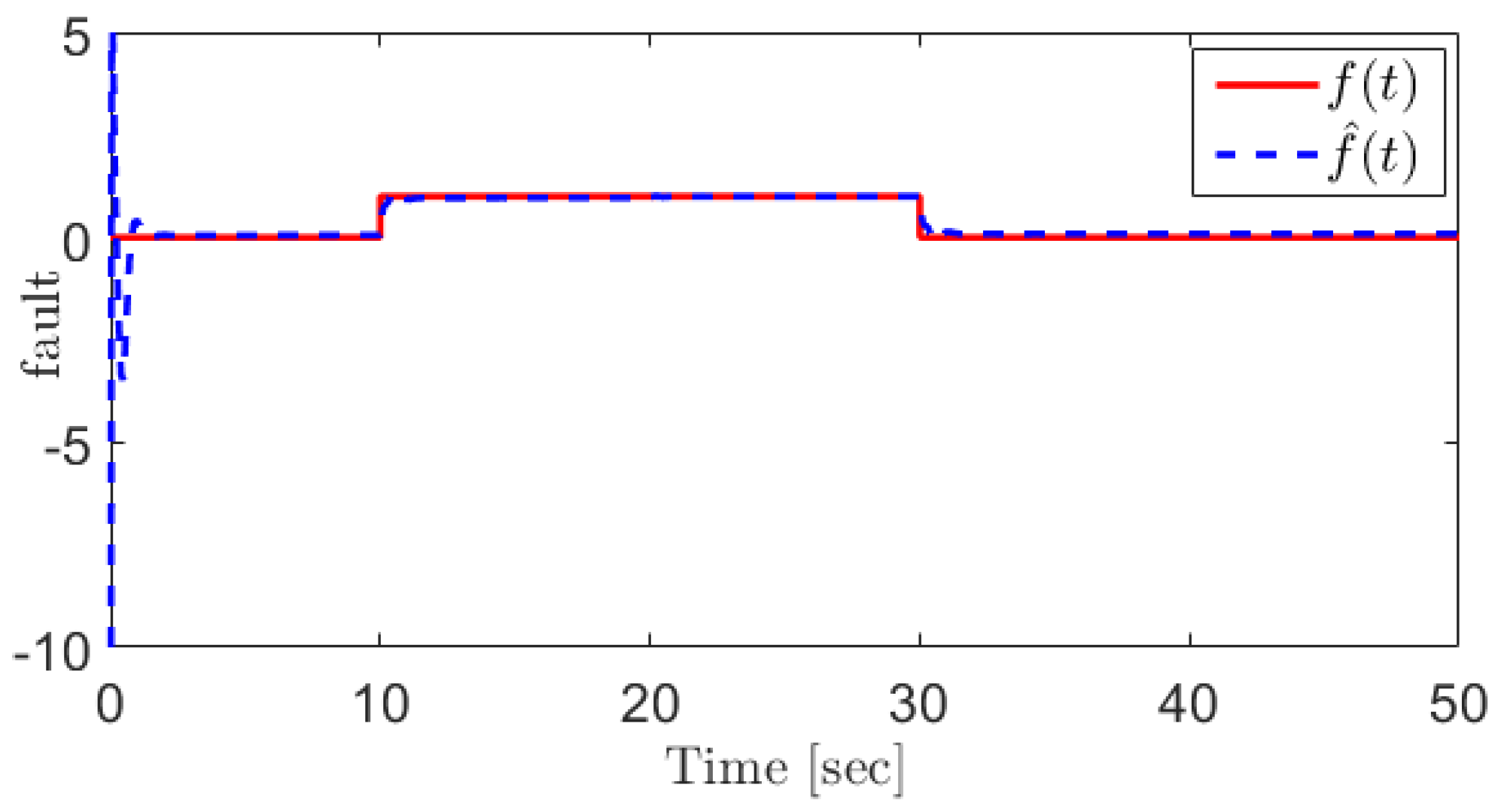
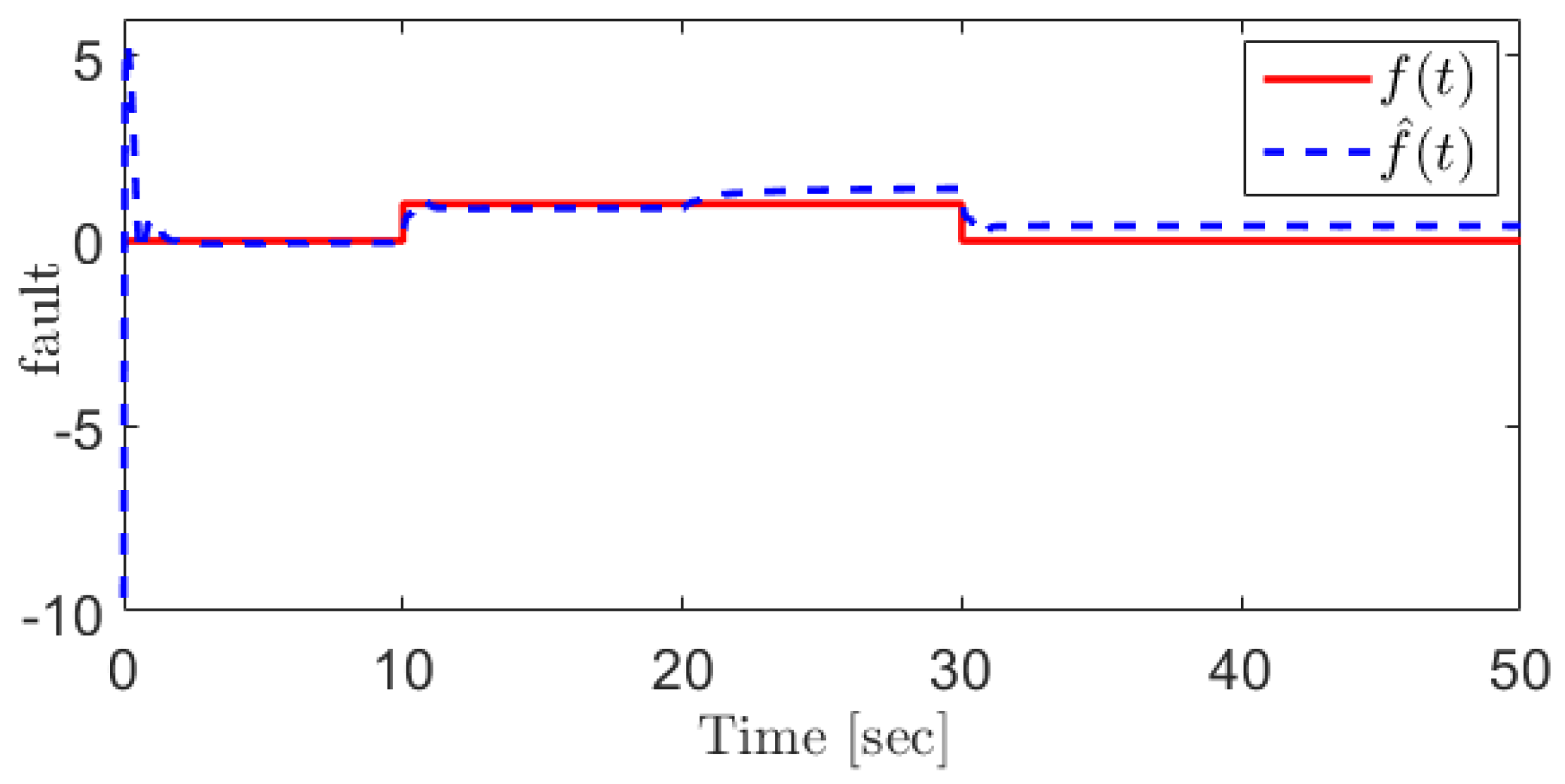
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nguyen, N.P.; Mung, N.X.; Thanh Ha, L.N.N.; Huynh, T.T.; Hong, S.K. Finite-Time Attitude Fault Tolerant Control of Quadcopter System via Neural Networks. Mathematics 2020, 8, 1541. [Google Scholar] [CrossRef]
- Ghanbarpour, K.; Bayat, F.; Jalilvand, A. Wind turbines sustainable power generation subject to sensor faults: Observer-based MPC approach. Int. Trans. Electr. Energy Syst. 2020, 30, e12174. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Rios-Garcia, N.; Barrero, F.; Martin, C. Open-switch fault detection in five-phase induction motor drives using model predictive control. IEEE Trans. Ind. Electron. 2017, 65, 3045–3055. [Google Scholar] [CrossRef]
- Bahrami, M.; Naraghi, M.; Zareinejad, M. Adaptive super-twisting observer for fault reconstruction in electro-hydraulic systems. ISA Trans. 2018, 76, 235–245. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khan, A.; Hwang, H.; Kim, H.S. Synthetic Data Augmentation and Deep Learning for the Fault Diagnosis of Rotating Machines. Mathematics 2021, 9, 2336. [Google Scholar] [CrossRef]
- Ghanbarpour, K.; Bayat, F.; Jalilvand, A. Dependable power extraction in wind turbines using model predictive fault tolerant control. Int. J. Electr. Power Energy Syst. 2020, 118, 105802. [Google Scholar] [CrossRef]
- Luenberger, D. An introduction to observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Alwi, H.; Edwards, C.; Tan, C.P. Fault Detection and Fault-Tolerant Control Using Sliding Modes; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Thanh, H.L.N.N.; Mung, N.X.; Nguyen, N.P.; Phuong, N.T. Perturbation observer-based robust control using a multiple sliding surfaces for nonlinear systems with influences of matched and unmatched uncertainties. Mathematics 2020, 8, 1371. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S.K.; Patton, R.J. Sliding mode observers for fault detection and isolation. Automatica 2000, 36, 541–553. [Google Scholar] [CrossRef]
- Taherkhani, A.; Bayat, F. Wind turbines robust fault reconstruction using adaptive sliding mode observer. IET Gener. Transm. Distrib. 2019, 13, 3096–3104. [Google Scholar] [CrossRef]
- Zhang, L.; Obeid, H.; Laghrouche, S.; Cirrincione, M. Second order sliding mode observer of linear induction motor. IET Electr. Power Appl. 2019, 13, 38–47. [Google Scholar] [CrossRef]
- Lin, C.; Sun, S.; Walker, P.; Zhang, N. Accelerated adaptive second order super-twisting sliding mode observer. IEEE Access 2018, 7, 25232–25238. [Google Scholar] [CrossRef]
- Levant, A. Robust exact differentiation via sliding mode technique. Automatica 1998, 34, 379–384. [Google Scholar] [CrossRef]
- Boiko, I.; Fridman, L.; Pisano, A.; Usai, E. Analysis of chattering in systems with second-order sliding modes. IEEE Trans. Autom. Control 2007, 52, 2085–2102. [Google Scholar] [CrossRef]
- Mohamed, G.; Sofiane, A.A.; Nicolas, L. Adaptive super twisting extended state observer based sliding mode control for diesel engine air path subject to matched and unmatched disturbance. Math. Comput. Simul. 2018, 151, 111–130. [Google Scholar] [CrossRef]
- Sankar, G.S.; Shekhar, R.C.; Manzie, C.; Sano, T.; Nakada, H. Model predictive controller with average emissions constraints for diesel airpath. Control Eng. Pract. 2019, 90, 182–189. [Google Scholar] [CrossRef] [Green Version]
- Kekik, B.; Akar, M. Model predictive control of diesel engine air path with actuator delays. IFAC-PapersOnLine 2019, 52, 150–155. [Google Scholar] [CrossRef]
- Yin, L.; Turesson, G.; Tunestål, P.; Johansson, R. Sliding mode control on receding horizon: Practical control design and application. Control Eng. Pract. 2021, 109, 104724. [Google Scholar] [CrossRef]
- Chua, W.S.; Chan, J.C.L.; Tan, C.P.; Chong, E.K.P.; Saha, S. Robust fault reconstruction for a class of nonlinear systems. Automatica 2020, 113, 108718. [Google Scholar] [CrossRef]
- Chu, Z.; Meng, F.; Zhu, D.; Luo, C. Fault reconstruction using a terminal sliding mode observer for a class of second-order MIMO uncertain nonlinear systems. ISA Trans. 2020, 97, 67–75. [Google Scholar] [CrossRef]
- Chen, L.; Shi, P.; Liu, M. Fault reconstruction for Markovian jump systems with iterative adaptive observer. Automatica 2019, 105, 254–263. [Google Scholar] [CrossRef]
- Zhirabok, A.; Shumsky, A.; Zuev, A. Fault diagnosis in linear systems via sliding mode observers. Int. J. Control 2019, 94, 327–335. [Google Scholar] [CrossRef]
- Tan, C.P.; Edwards, C. Robust fault reconstruction in uncertain linear systems using multiple sliding mode observers in cascade. IEEE Trans. Autom. Control 2010, 55, 855–867. [Google Scholar]
- Li, R.; Yang, Y. Sliding-mode observer-based fault reconstruction for TS fuzzy descriptor systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 5046–5055. [Google Scholar] [CrossRef]
- Dai, C.; Liu, Y.; Sun, H. Fault Reconstruction for Lipschitz Nonlinear Systems Using Higher Terminal Sliding Mode Observer. J. Shanghai Jiaotong Univ. Sci. 2020, 25, 630–638. [Google Scholar] [CrossRef]
- Mollenhauer, K.; Tschöke, H.; Johnson, K.G. Handbook of Diesel Engines; Springer: Berlin, Germany, 2010; Volume 1. [Google Scholar]
- Guzzella, L.; Onder, C. Introduction to Modeling and Control of Internal Combustion Engine Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Eriksson, L.; Nielsen, L. Modeling and Control of Engines and Drivelines; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Tan, C.P.; Edwards, C. Sliding mode observers for robust detection and reconstruction of actuator and sensor faults. Int. J. Robust Nonlinear Control IFAC-Affil. J. 2003, 13, 443–463. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value | Unit |
|---|---|---|---|
| Volumetric efficiency | 0.043 | - | |
| Displaced volume | 12.4 | m | |
| Engine speed | 1500 | ||
| Intake manifold volume | 0.00192 | m | |
| Intake gas temperature | 315.2 | K | |
| The downstream pressure ratio of EGR | Pa | ||
| The radius of the compressor blade | m | ||
| Volumetric flow efficiency | 0.6 | - | |
| Ambient temperature of the intake gas | 750 | K | |
| Heat capacity of intake gas | 1.1 | - | |
| Ideal gas constant for the air | 287 | ||
| Compressor efficiency | 0.73 | - | |
| Turbocharger speed | |||
| Rotating inertia of the turbocharger | kg·m | ||
| Intake gas pressure | Pa | ||
| Heat capacity ratio of intake gas | 2.2 | - | |
| The maximum nominal flow area of VGR | 8.5 | m | |
| Exhaust pressure before the turbine | Pa | ||
| Mass flow depends on the pressure ratio | 0.4 | - | |
| Turbine efficiency | 0.526 | - | |
| Heat capacity of exhaust gas | 1.31 | - | |
| Gas exhaust temperature before the turbine | 693 | K | |
| Ideal gas constant for exhaust gas | 22.55 | ||
| Heat capacity ratio of exhaust gas | 1.7 | - | |
| Maximum nominal flow area of EGR | 8.4 | m | |
| The function of the pressure ratio | 1.7 | - |
| Sensor Fault | ||
|---|---|---|
| Manifold gas pressure | 0.122 | 0.2572 |
| EGR mass flow rate (SOSMO) | 0.112 | 0.0332 |
| EGR mass flow rate (SMO) | 0.125 | 0.751 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taherkhani, A.; Bayat, F.; Mobayen, S.; Bartoszewicz, A. Dependable Sensor Fault Reconstruction in Air-Path System of Heavy-Duty Diesel Engines. Sensors 2021, 21, 7788. https://doi.org/10.3390/s21237788
Taherkhani A, Bayat F, Mobayen S, Bartoszewicz A. Dependable Sensor Fault Reconstruction in Air-Path System of Heavy-Duty Diesel Engines. Sensors. 2021; 21(23):7788. https://doi.org/10.3390/s21237788
Chicago/Turabian StyleTaherkhani, Ashkan, Farhad Bayat, Saleh Mobayen, and Andrzej Bartoszewicz. 2021. "Dependable Sensor Fault Reconstruction in Air-Path System of Heavy-Duty Diesel Engines" Sensors 21, no. 23: 7788. https://doi.org/10.3390/s21237788
APA StyleTaherkhani, A., Bayat, F., Mobayen, S., & Bartoszewicz, A. (2021). Dependable Sensor Fault Reconstruction in Air-Path System of Heavy-Duty Diesel Engines. Sensors, 21(23), 7788. https://doi.org/10.3390/s21237788