
Multi-Layer Defences for Robust GNSS Timing Retrieval †


Abstract
:1. Introduction
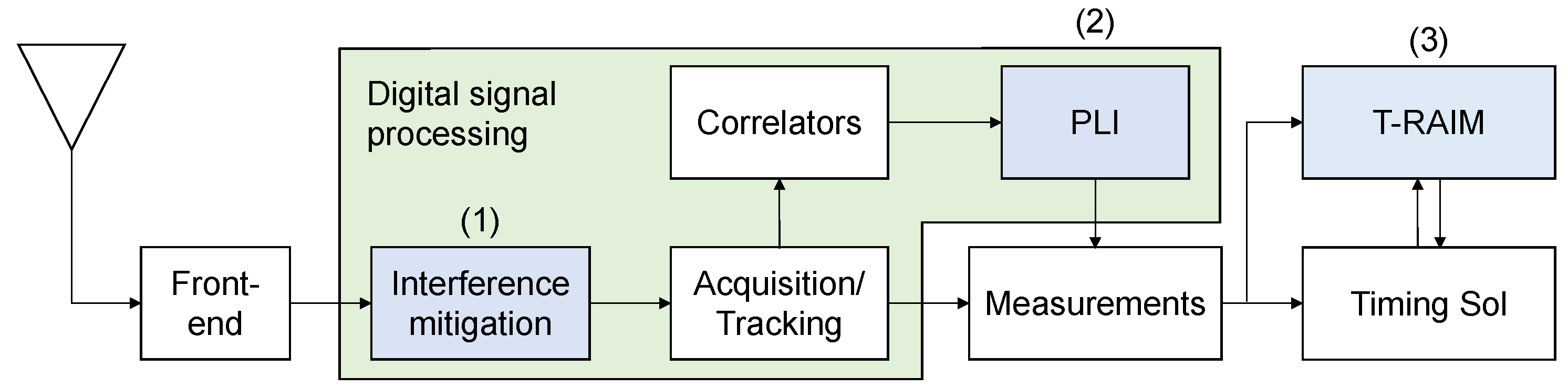
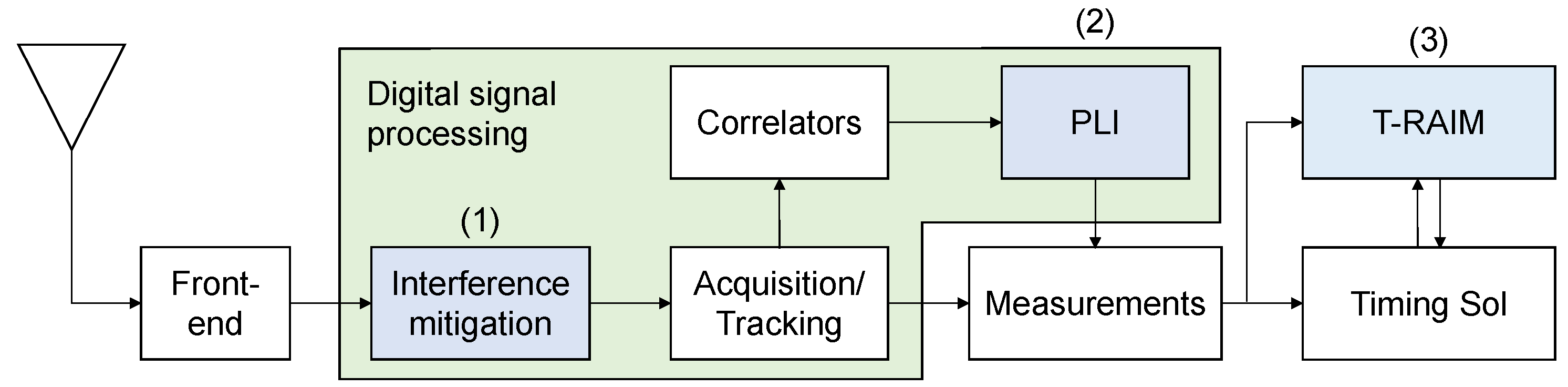
2. Interference Defences
2.1. Pre-Correlation Defences
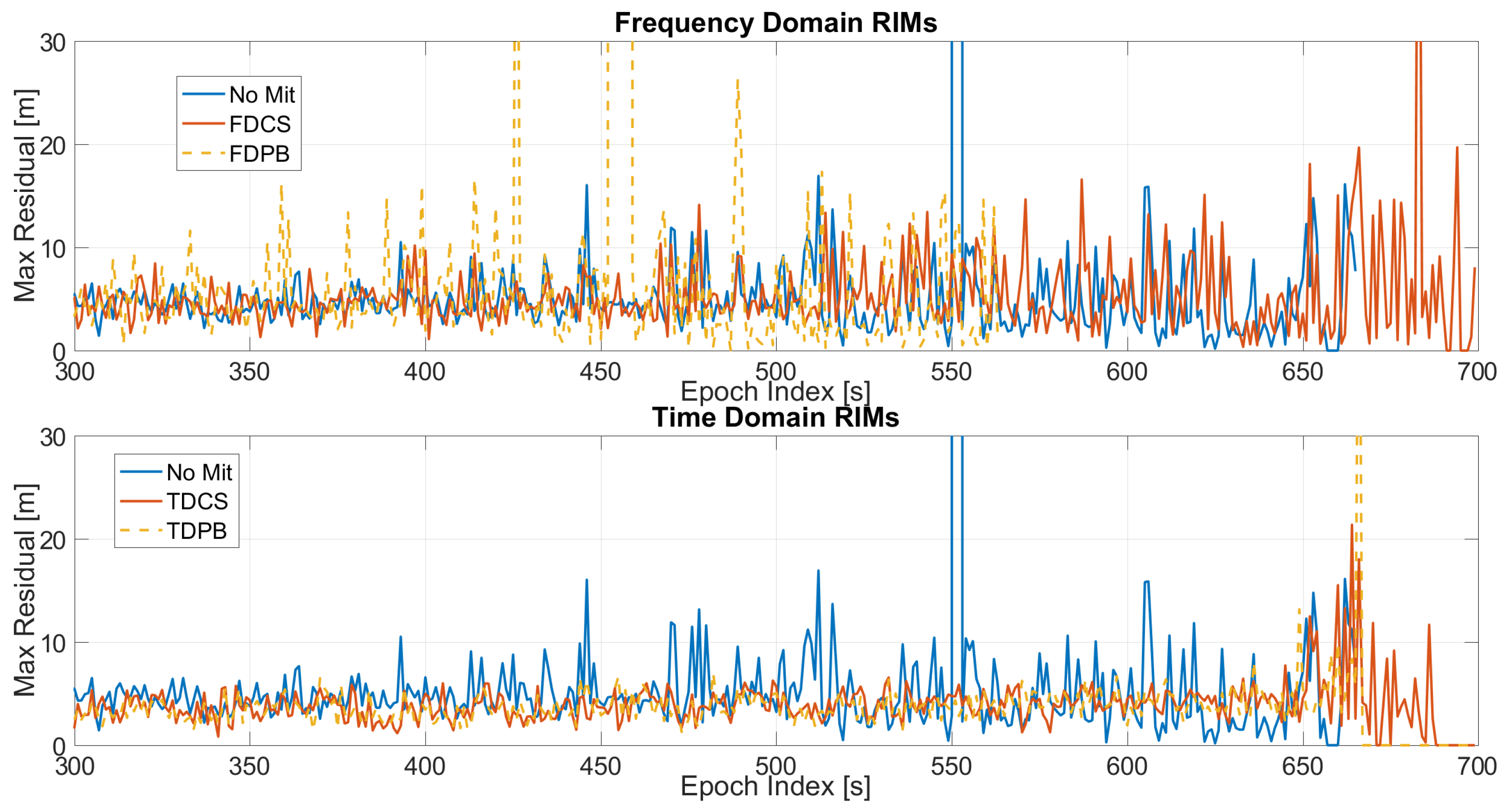
- Time Domain Pulse Blanking (TDPB): also known a Pulse Blanking (PB). This technique sets to zeros all the input samples with magnitude greater than a decision threshold, . In this case, was selected where is the total variance of the input samples estimated in the absence of interference.
- Time Domain Complex Signum (TDCS): the input samples are processed with the complex signum non-linearity and the output samples are obtained aswhere are digital samples provided by the receiver front-end and n is the time index. A sampling frequency is assumed.
- Frequency Domain Pulse Blanking (FDPB) implements frequency domain excision: the input samples are at first brought into the frequency domain using a Discrete Fourier Transform (DFT)/Fast Fourier Transform (FFT) operation. Blanking is then applied and frequency samples with a magnitude greater than a threshold are set to zero. Finally, the blanked frequency domain samples are brought back in the time domain. In addition, in this case, we used a threshold equal to three times the standard deviation of the frequency domain samples estimated in the absence of interference.
- Frequency Domain Complex Signum (FDCS): complex signum non-linearity (1) is applied to the frequency domain samples. As for the FDPB case, DFT/FFT and inverse operations are used to transform the samples between time and frequency domains.
2.2. Post-Correlation Defences
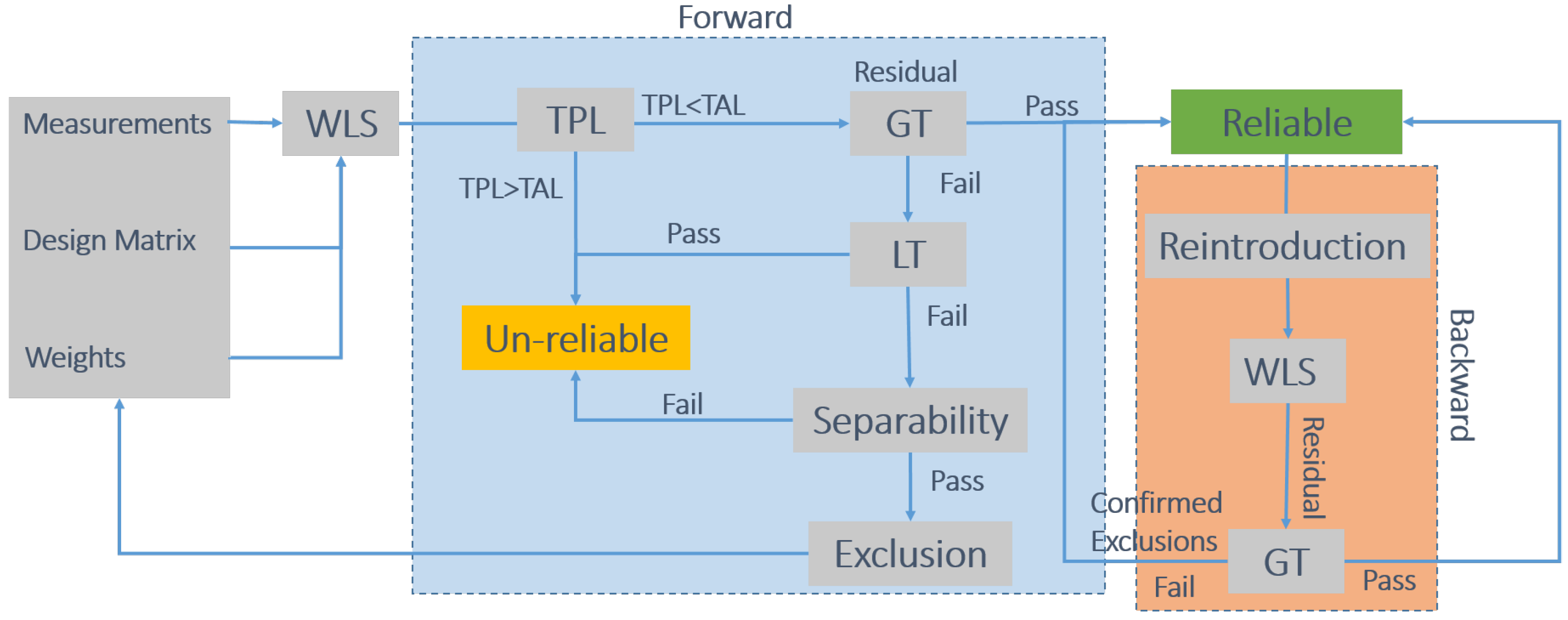
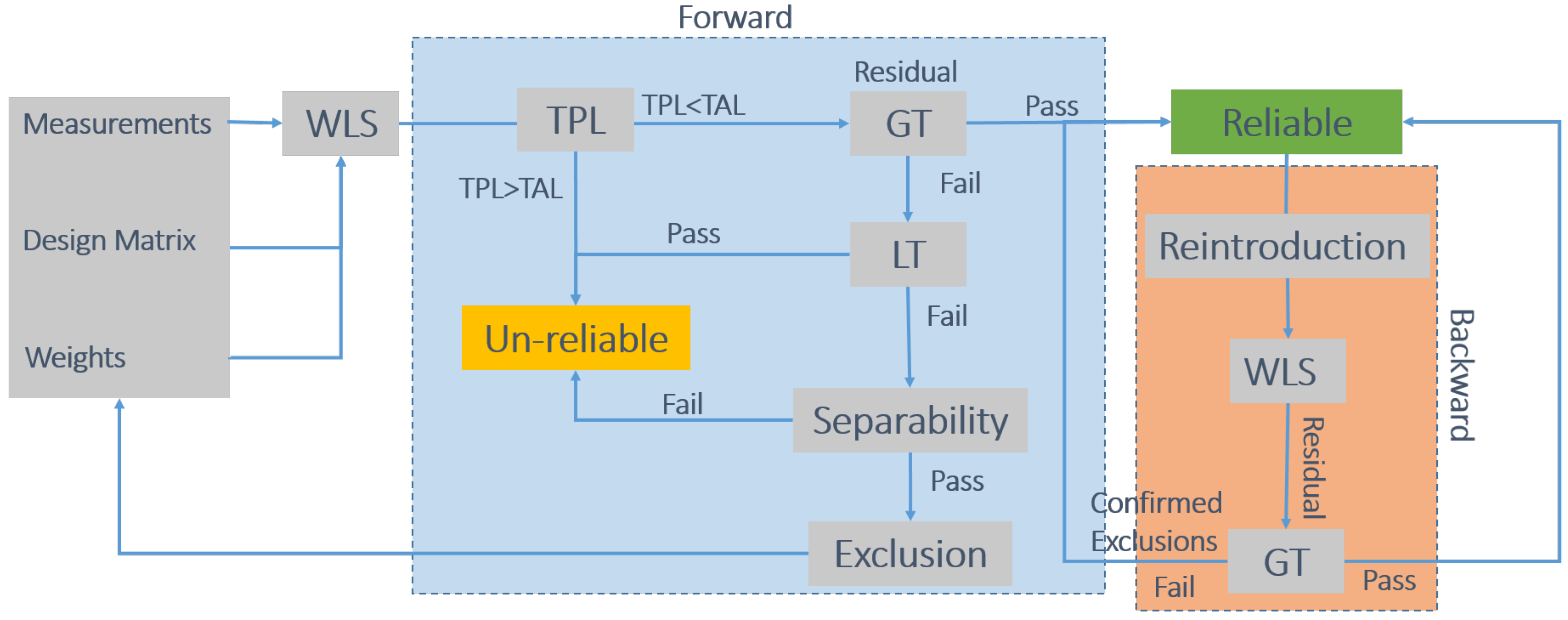
2.3. Navigation Solution Defences
2.3.1. TPL Check
2.3.2. Global Test Check
2.3.3. Local Test Check
2.3.4. Separability Check
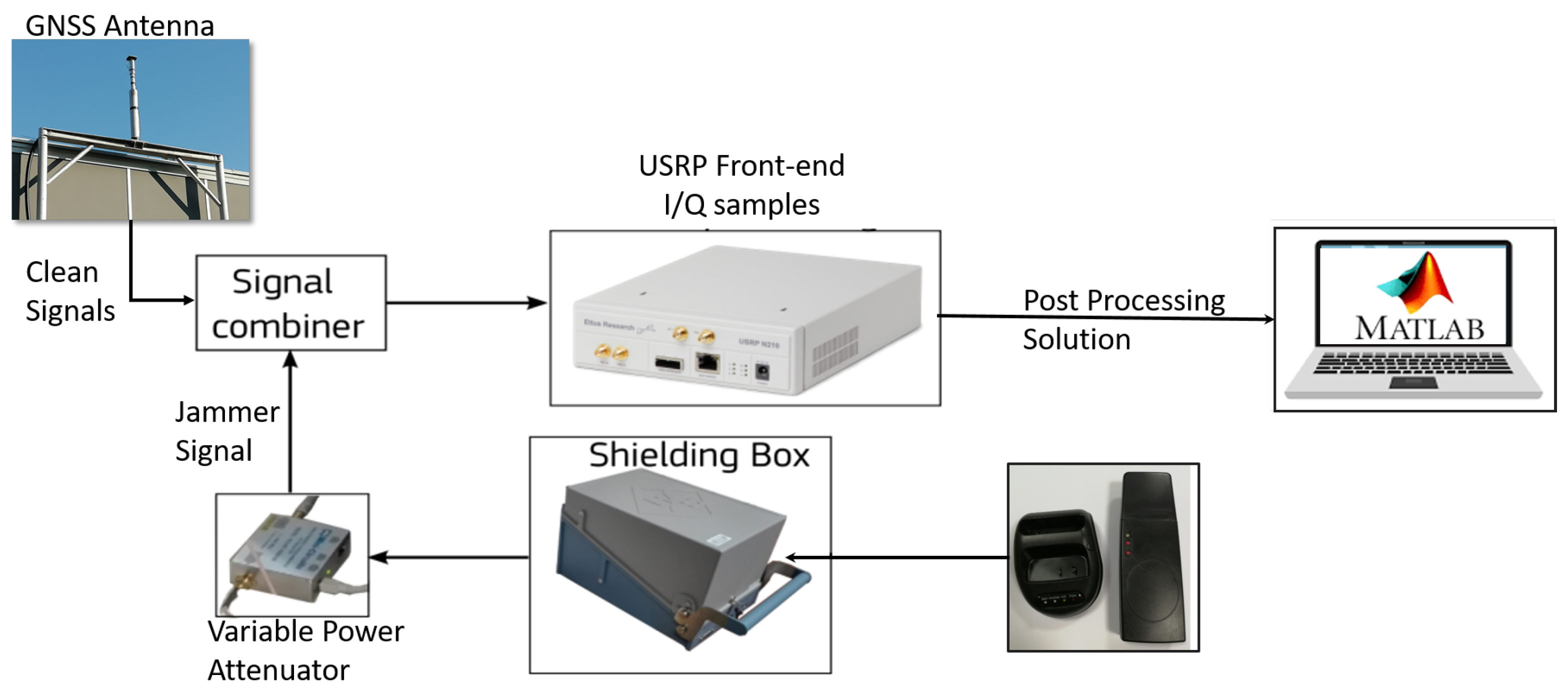
3. Data and Setup
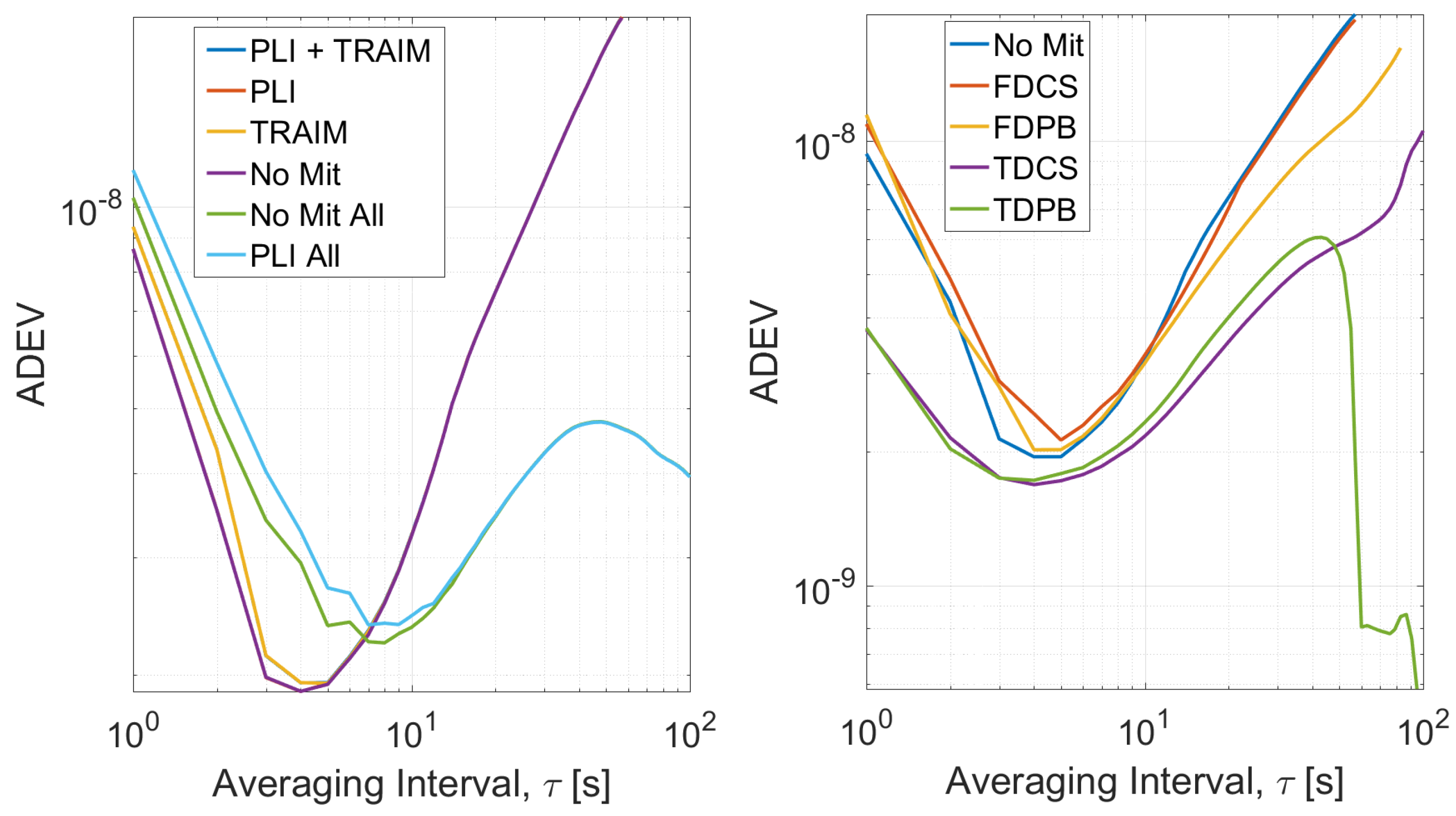
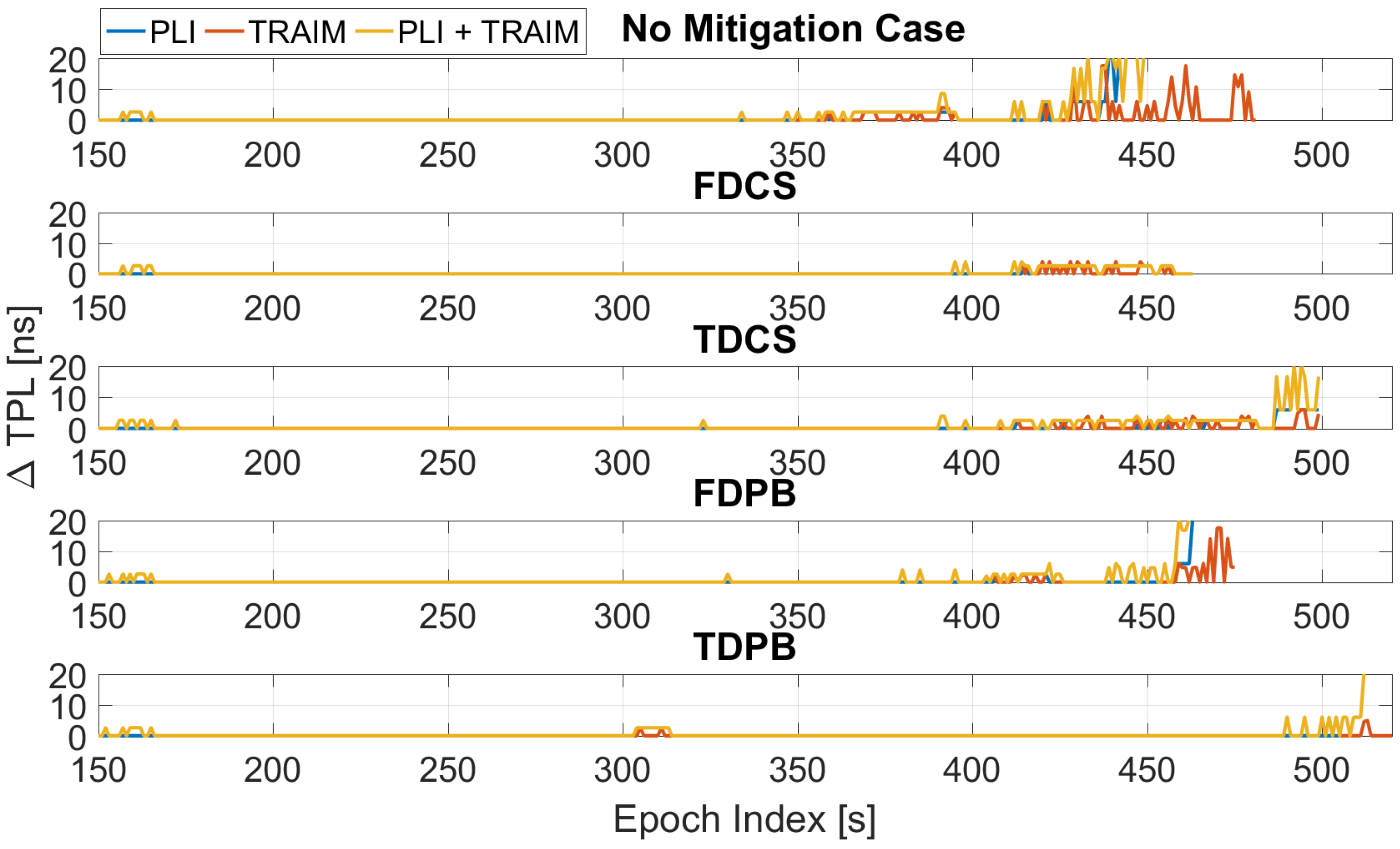
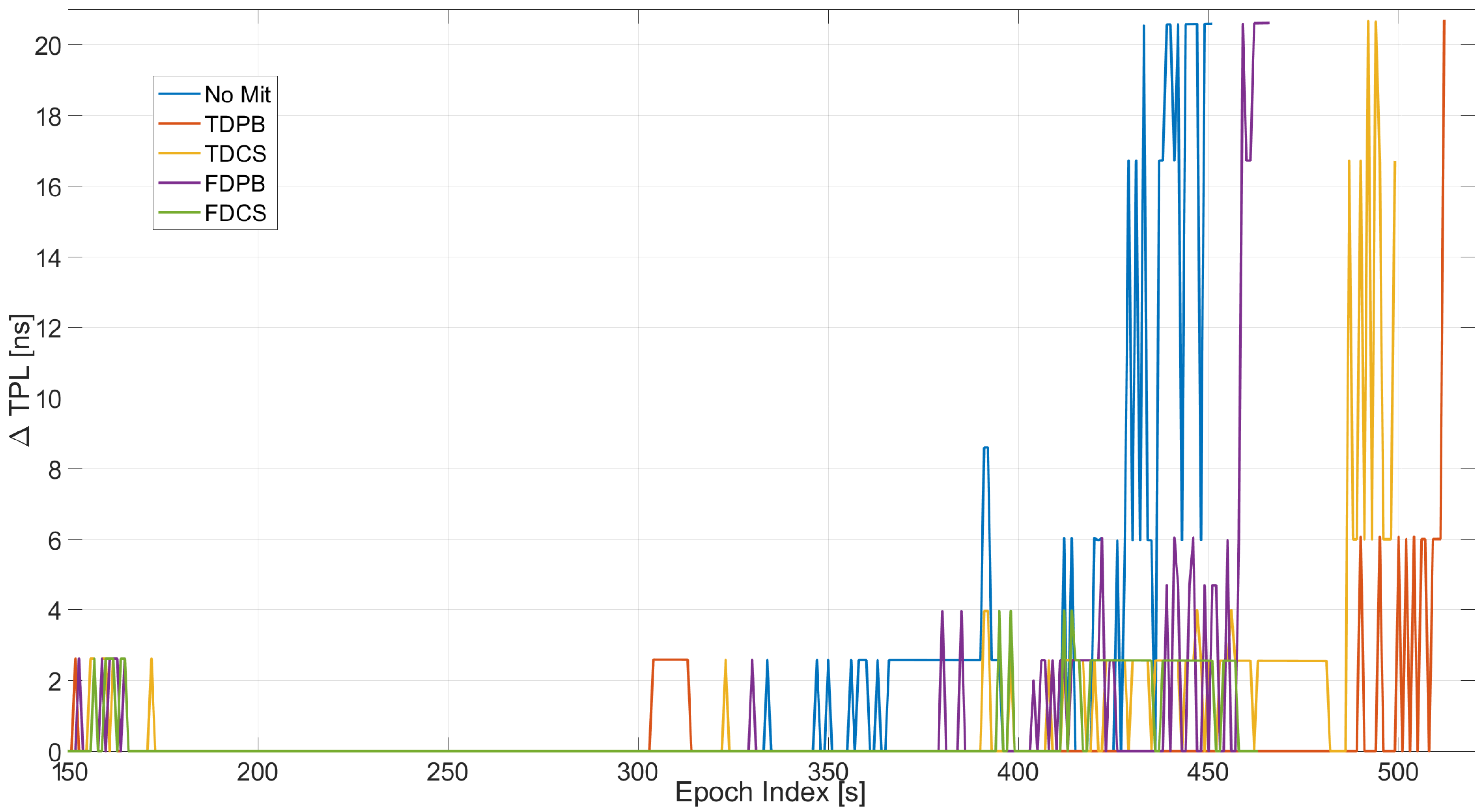
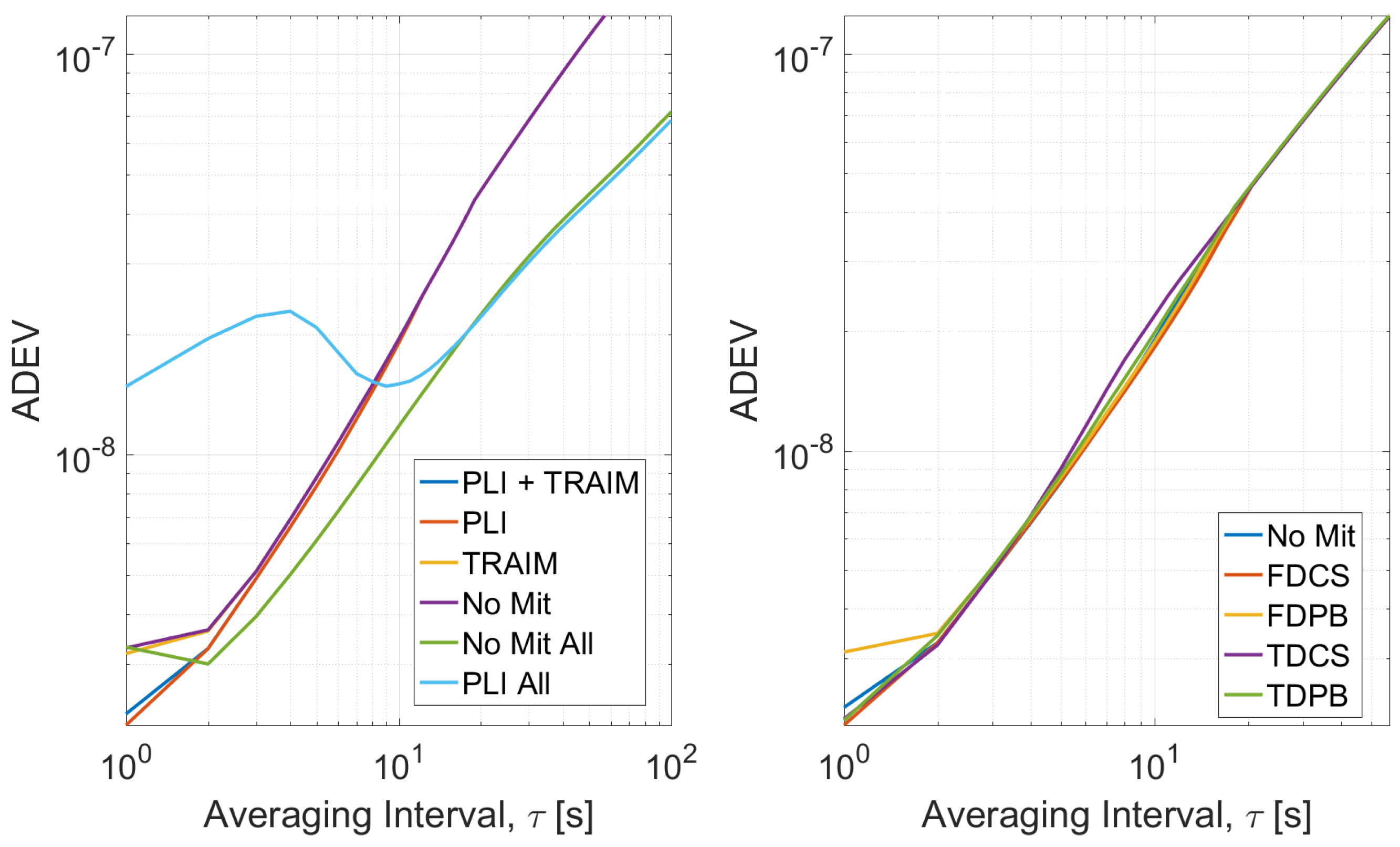
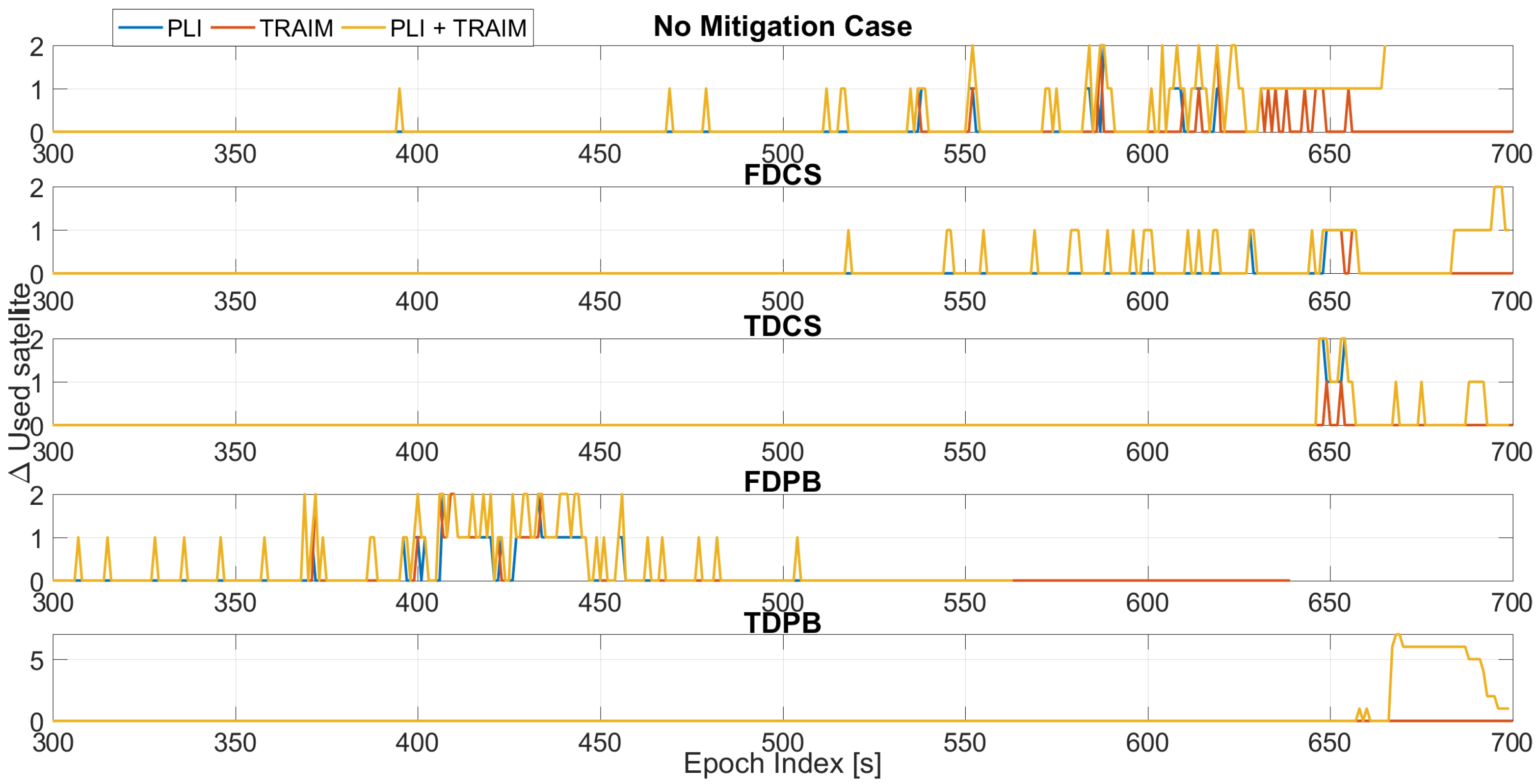
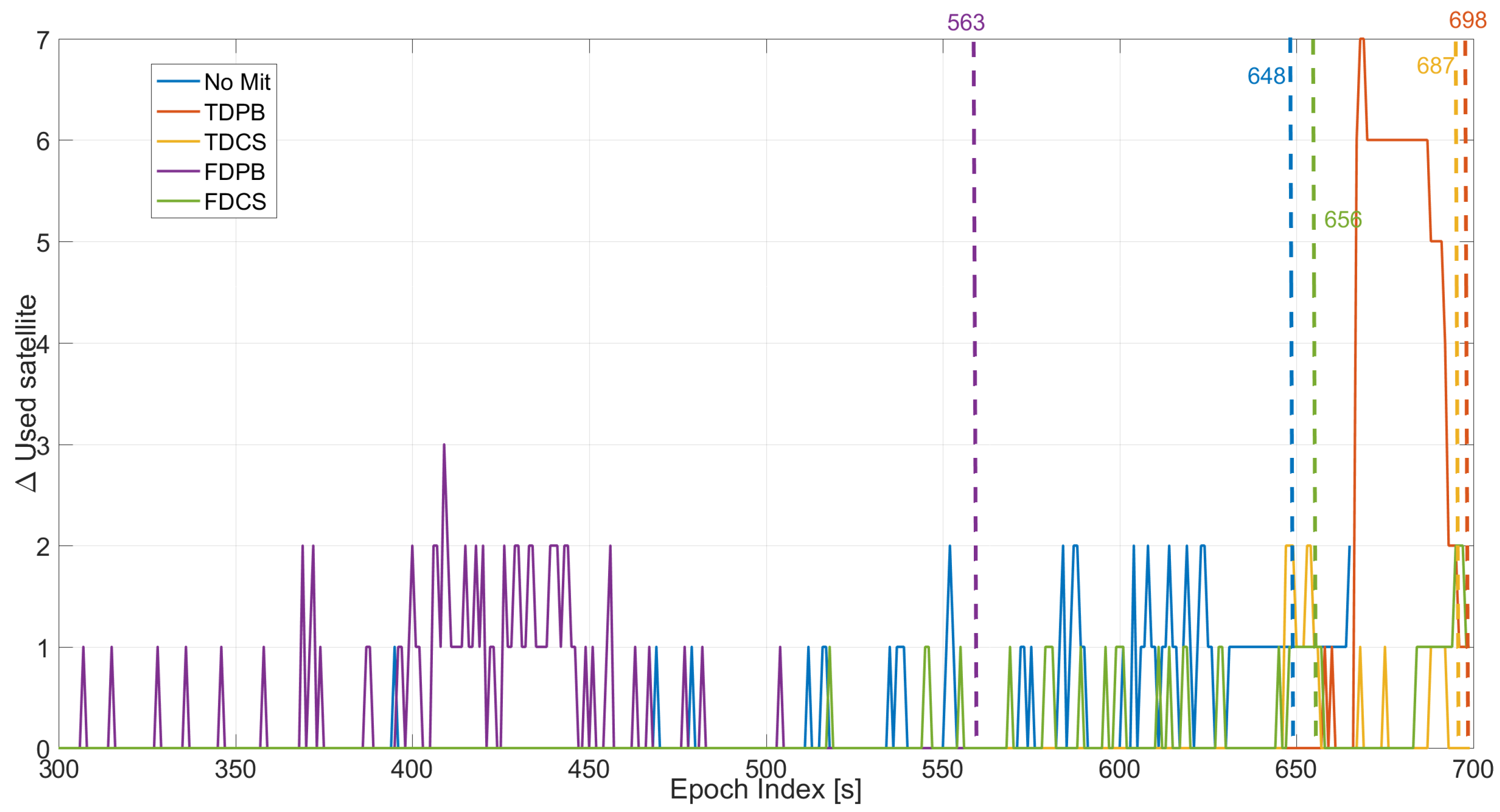
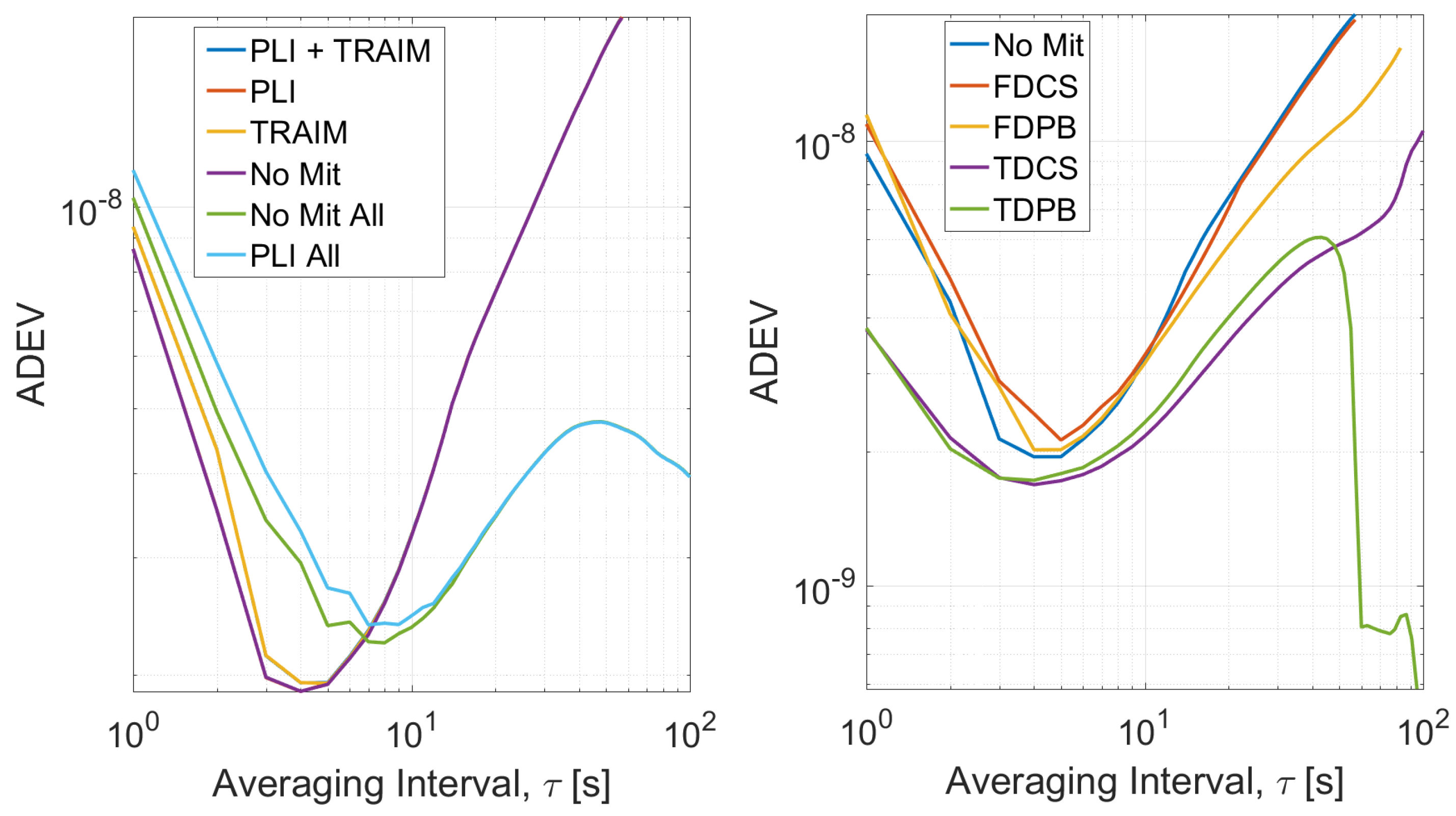
4. Results
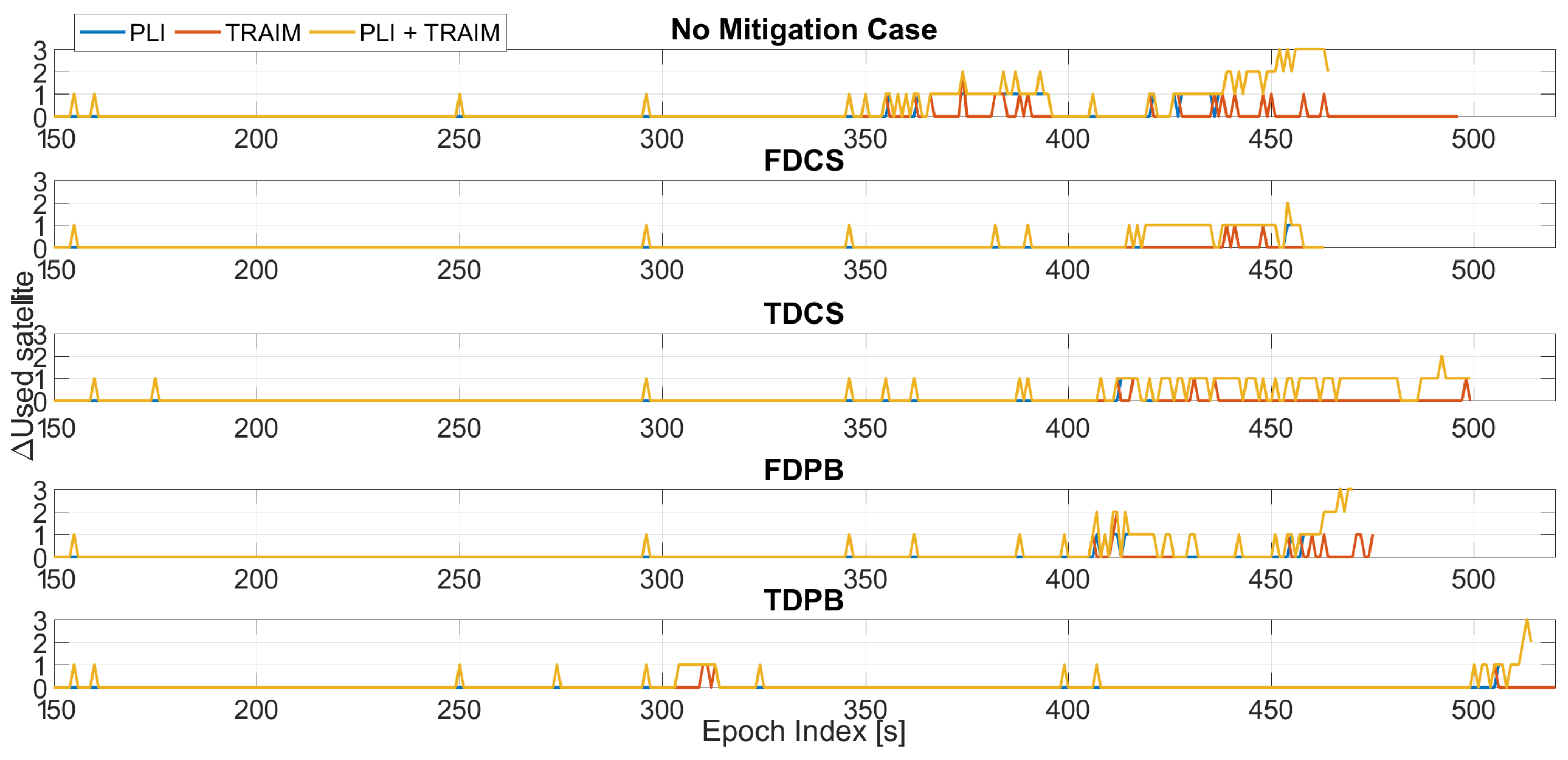
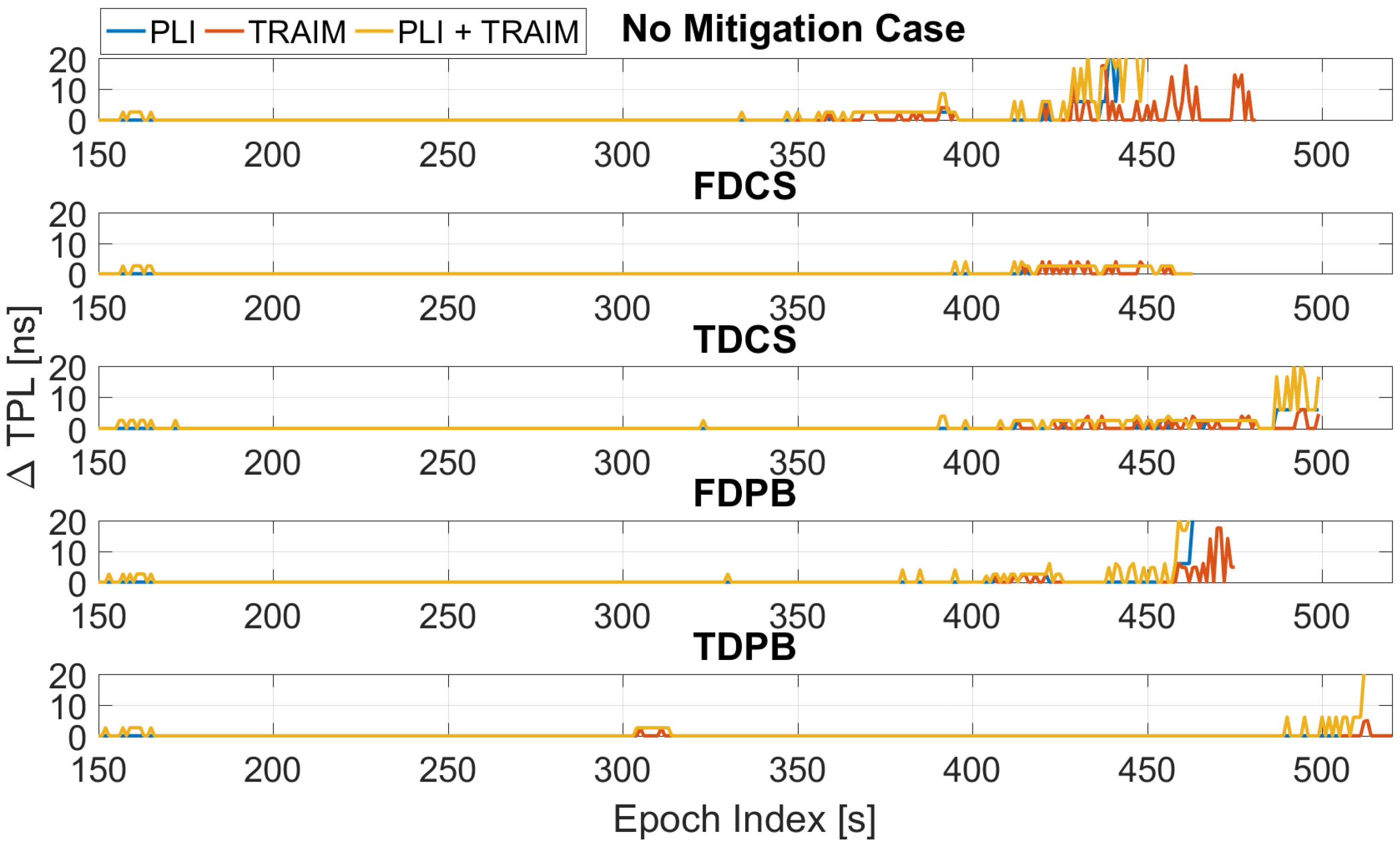
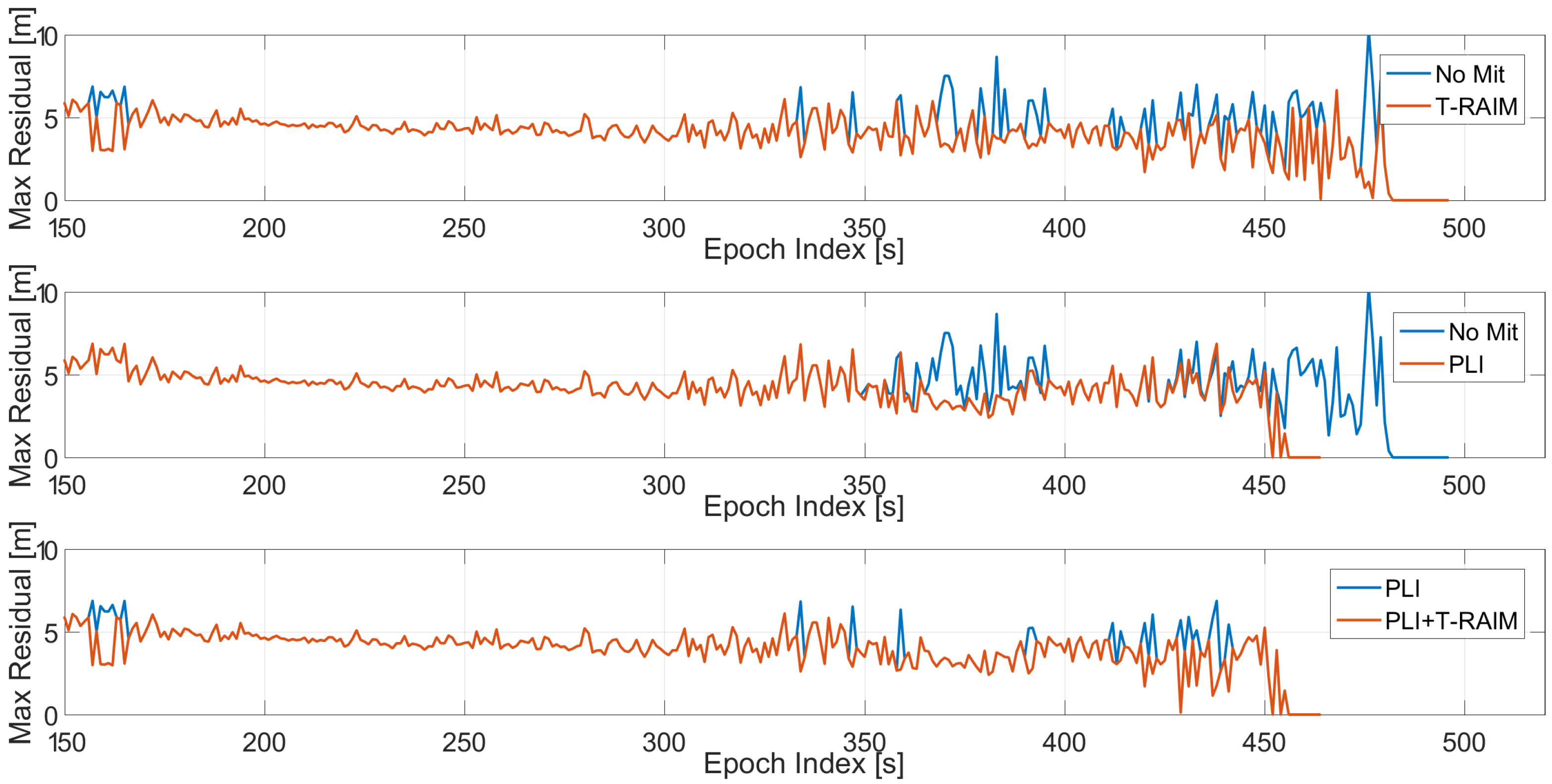
- PLI on and T-RAIM off (PLI);
- PLI off and T-RAIM on (T-RAIM);
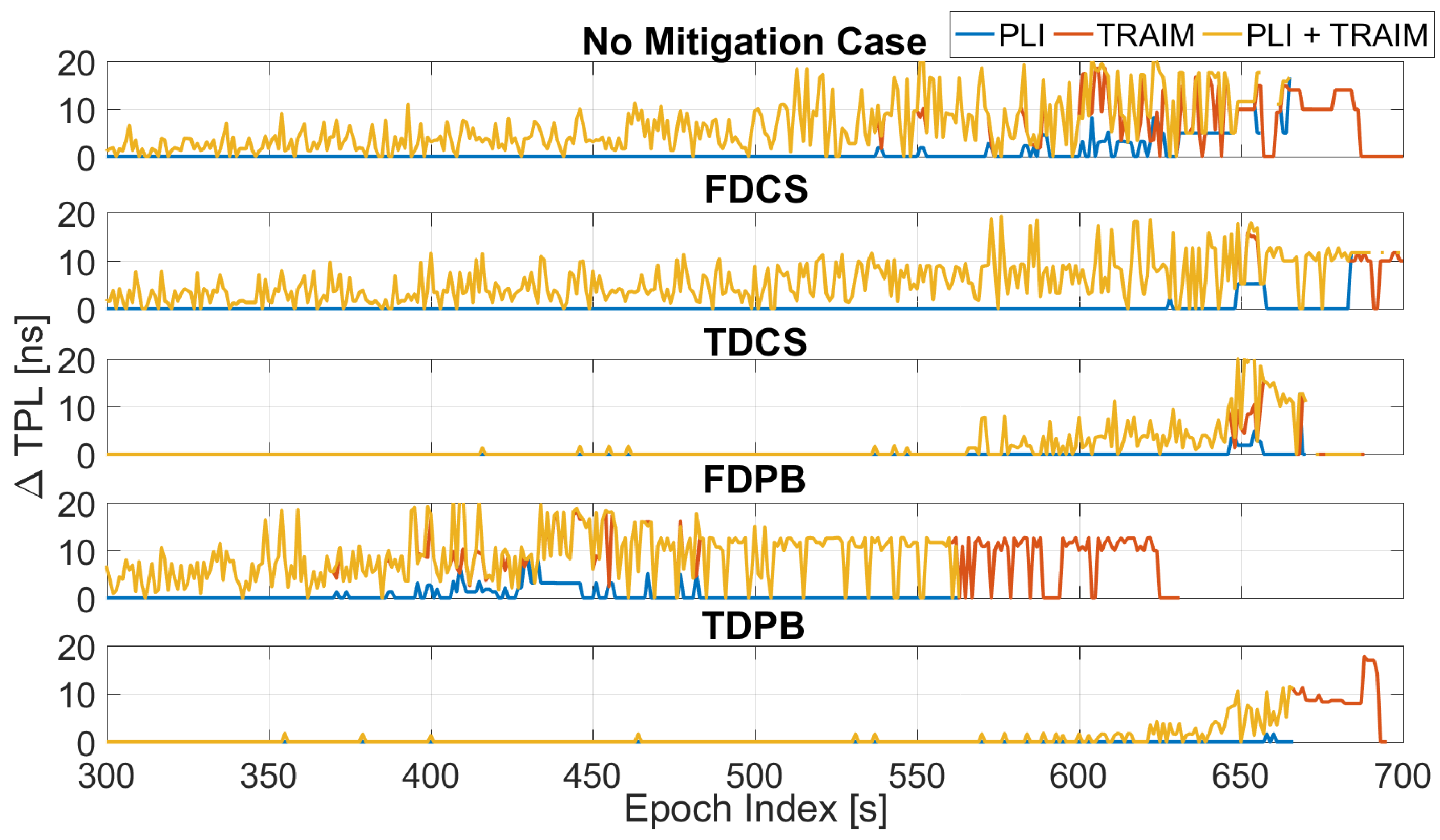
- PLI and T-RAIM both on (PLI + T-RAIM).
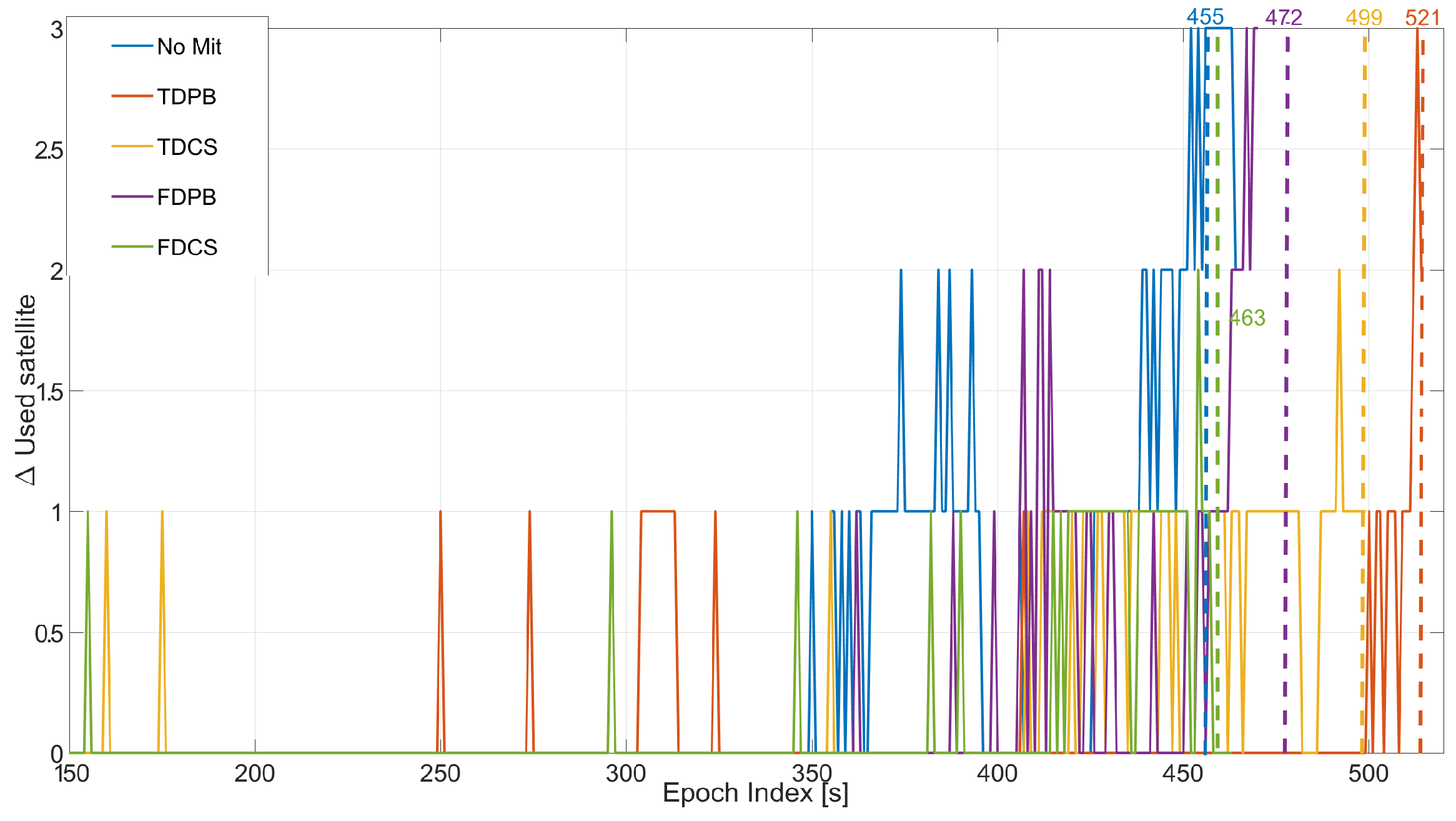
- number of satellites used in the timing solution;
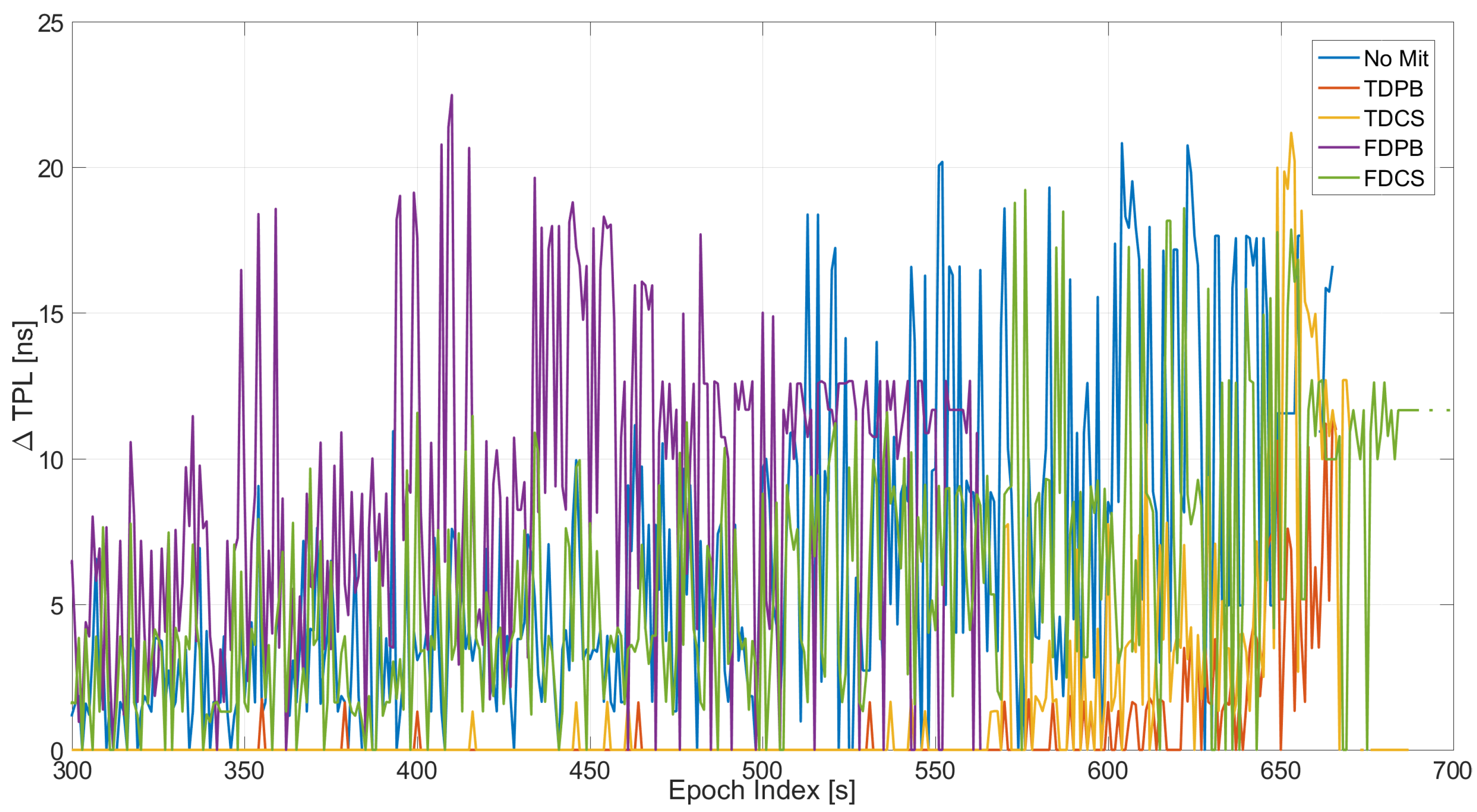
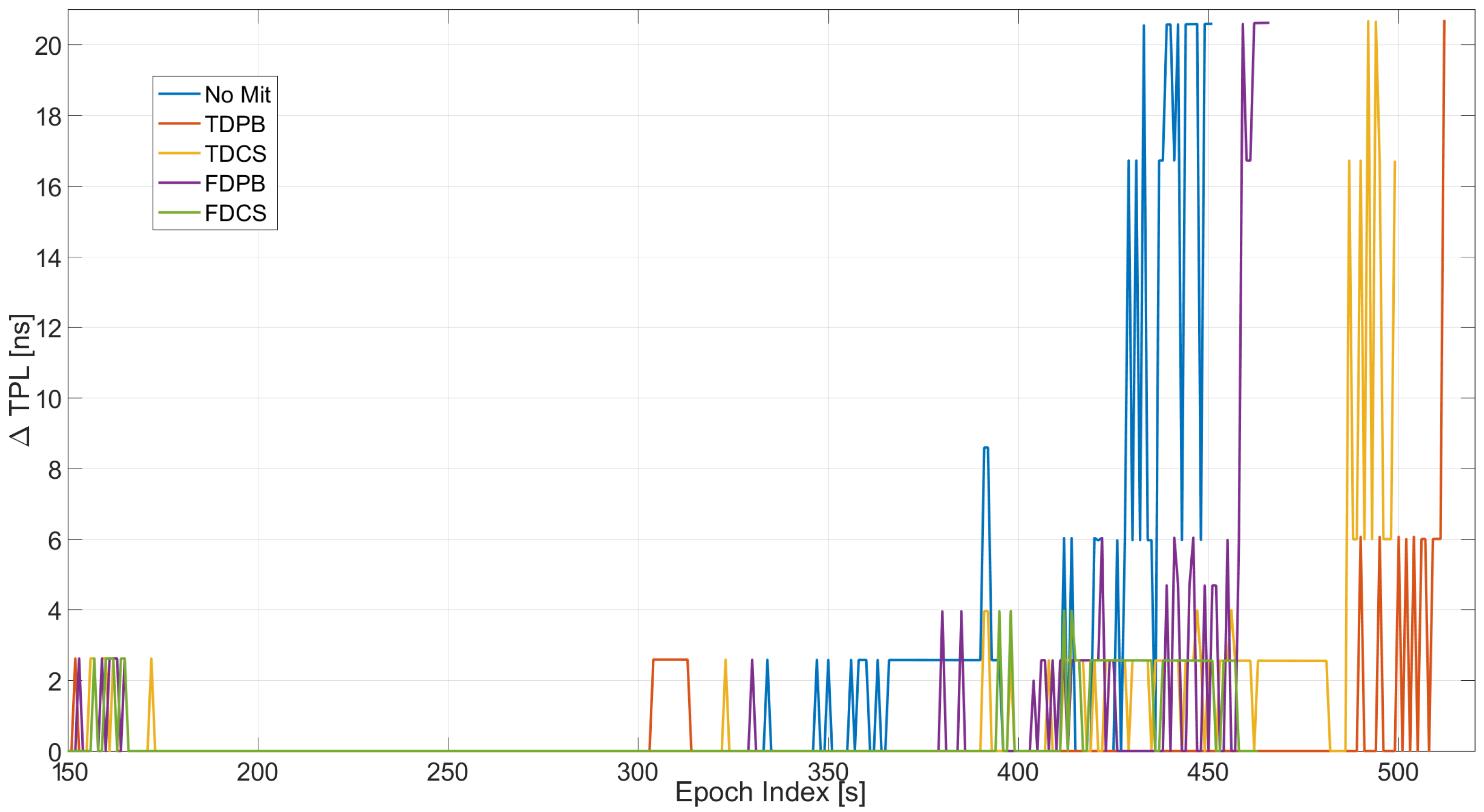
- TPL, in particular the variation of the TPL is considered;
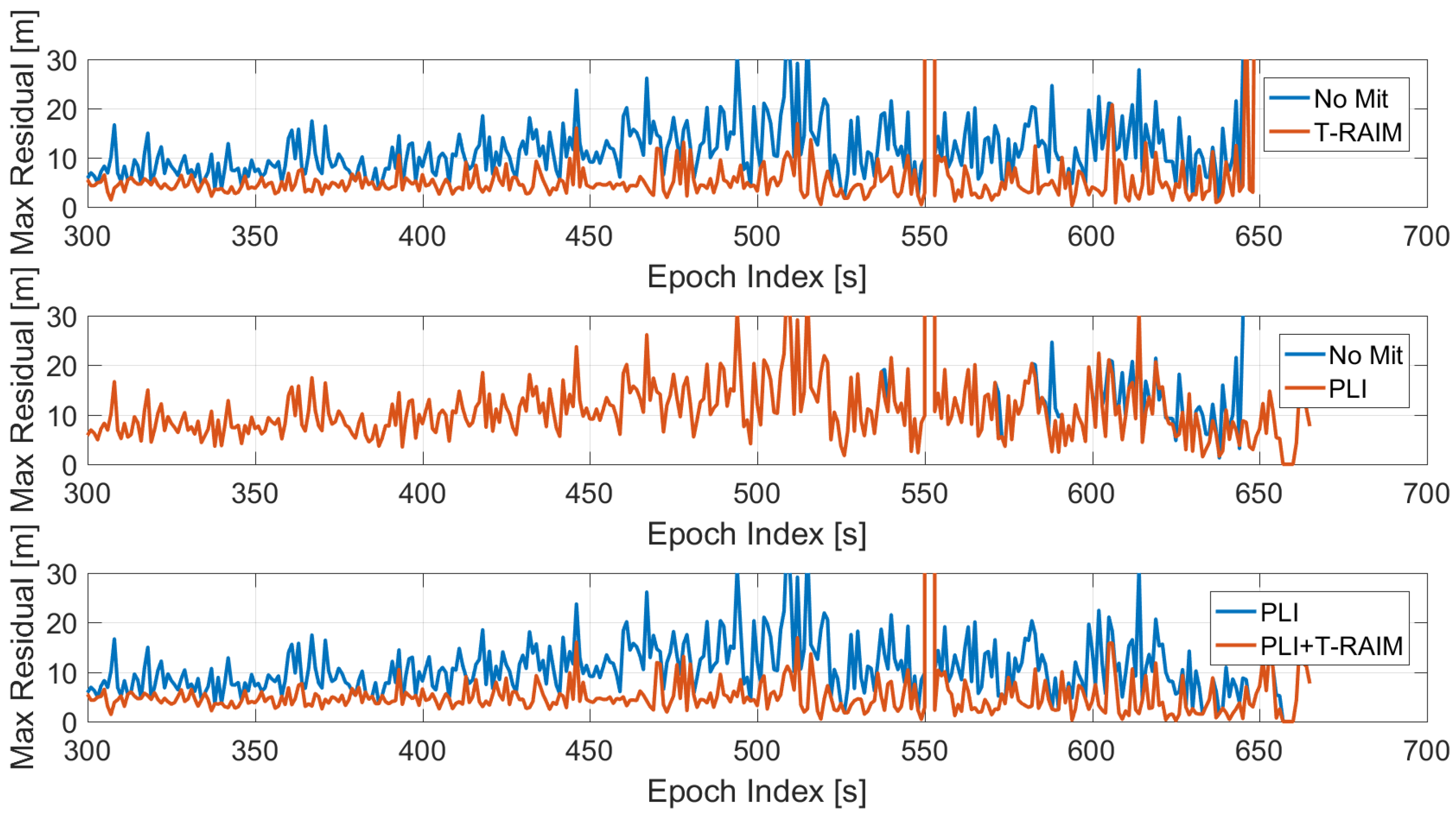
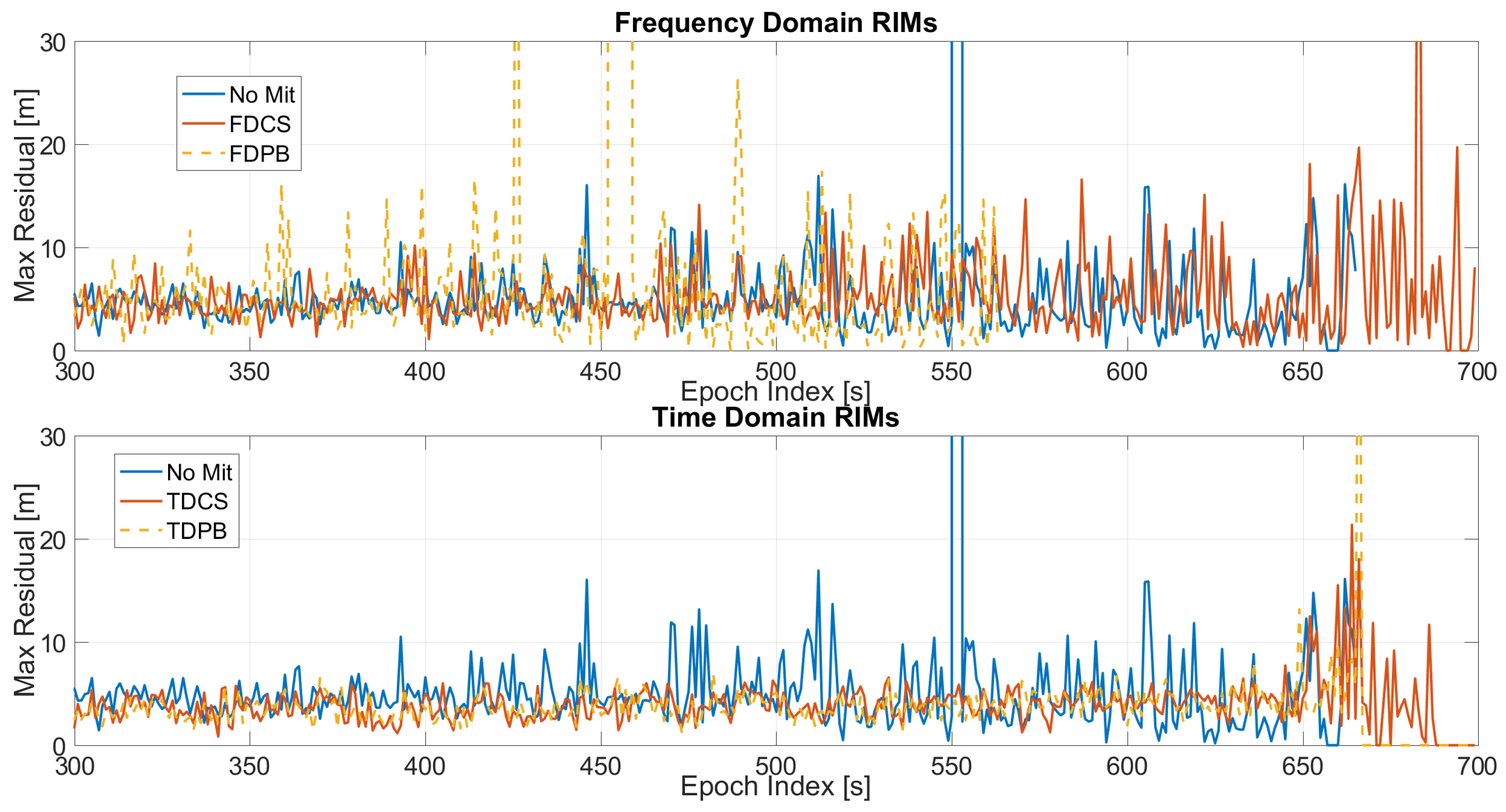
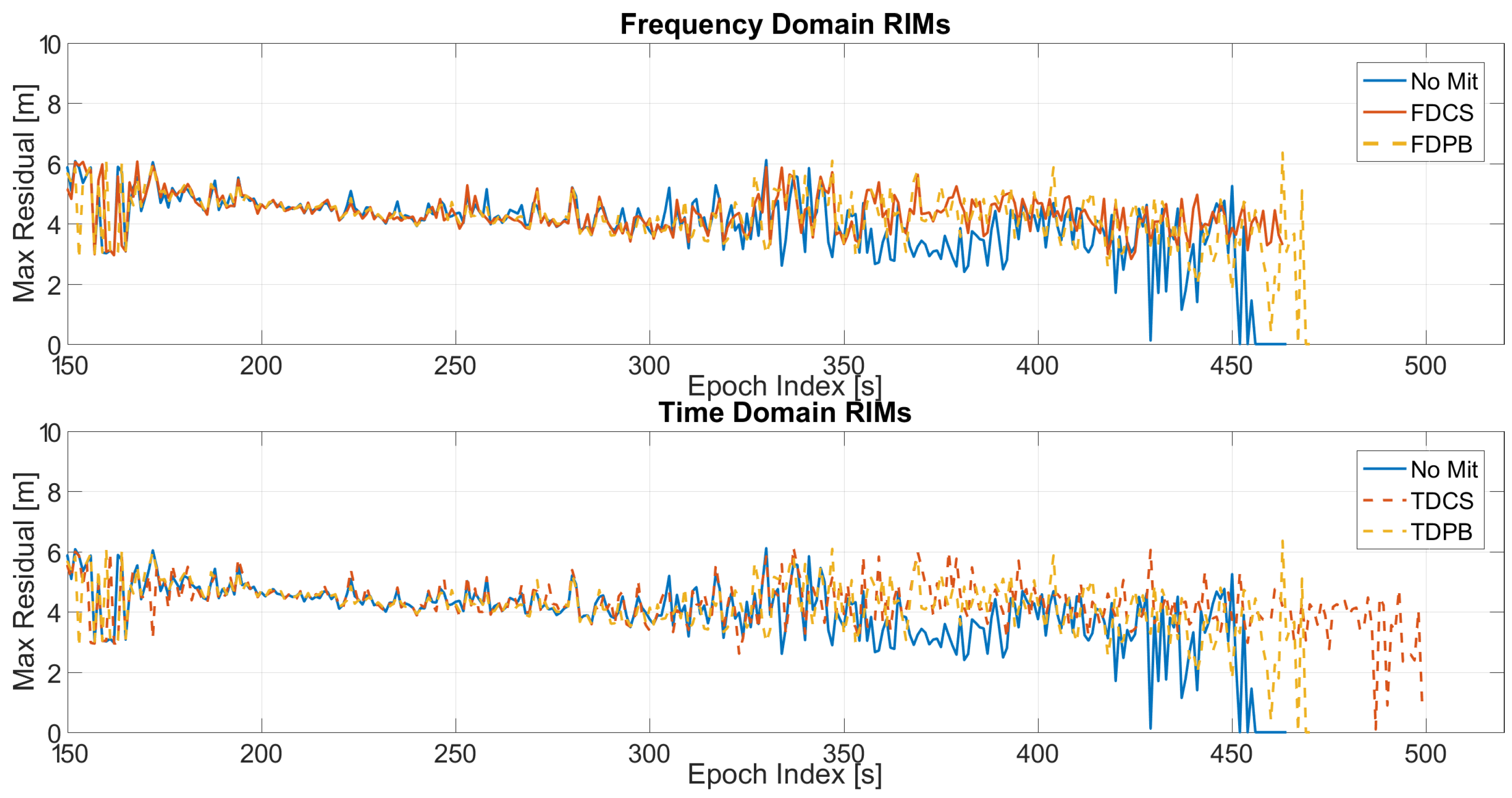
- maximum residual;
4.1. Test 1 Results
4.2. Test E5B Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Zhang, P.; Tu, R.; Gao, Y.; Hong, J.; Han, J.; Lu, X. Comparison of Multi-GNSS Time and Frequency Transfer Performance Using Overlap-Frequency Observations. Remote Sens. 2021, 13, 3130. [Google Scholar] [CrossRef]
- European GNSS Agency (GSA). GSA GNSS Market Report. 2019. Available online: https://www.euspa.europa.eu/system/files/reports/market_report_issue_6_v2.pdf (accessed on 14 November 2021).
- Center for Advanced Defense Studies. Above Us Only Stars Exposing GPS Spoofing in Russia and Syria; Technical Report, C4ADS. 2019. Available online: https://static1.squarespace.com/static/566ef8b4d8af107232d5358a/t/5c99488beb39314c45e782da/1553549492554/Above+Us+Only+Stars.pdf (accessed on 14 November 2021).
- Darabseh, A.; Bitsikas, E.; Tedongmo, B. Detecting GPS Jamming Incidents in OpenSky Data. In Proceedings of the 7th OpenSky Workshop 2019, Zurich, Switzerland, 21–22 November 2019. [Google Scholar]
- McCreadie, M. Standardisation of GNSS Threat Reporting and Receiver Testing through International Knowledge Exchange, Experimentation and Exploitation. Strike3 Final Report. 2019. Available online: http://gnss-strike3.eu/ (accessed on 14 November 2021).
- Catalano, V.; Marradi, L.; Franzoni, G.; Puccitelli, M.; Campana, R.; Muscinelli, R.; Poggi, R.; Nogas, P.; Nawrocki, J.; Detoma, E.; et al. The GIANO Project: Development of a Galileo-Based Timing Receiver for Increasing Critical Infrastructures Resilience. In Proceedings of the 51st Annual Precise Time and Time Interval Systems and Applications Meeting, San Diego, CA, USA, 21–24 January 2020. [Google Scholar]
- Dovis, F. (Ed.) GNSS Interference Threats and Countermeasures; Artech House: Norwood, MA, USA, 2015. [Google Scholar]
- European Commission. Preparation of Standards for Galileo Timing Receivers; Notice Publication Number 324819-2021. 2021. Available online: https://ted.europa.eu/udl?uri=TED:NOTICE:324819-2021:DATA:EN:HTML&tabId=3 (accessed on 14 November 2021).
- Borio, D.; Gioia, C. GNSS interference mitigation: A measurement and position domain assessment. Navigation 2021, 68, 93–114. [Google Scholar] [CrossRef]
- Van Dierendonck, A. GPS Receivers. In Global Positioning System Theory and Applications; Parkinson, B.W., Spilker, J.J., Jr., Eds.; American Institute of Aeronautics & Astronautics: Washington, DC, USA, 1996; Volume 1, pp. 329–407. [Google Scholar]
- Zabalegui, P.; Miguel, G.D.; Pérez, A.; Mendizabal, J.; Goya, J.; Adin, I. A Review of the Evolution of the IntegrityMethods Applied in GNSS. IEEE Access 2020, 8, 45813–45824. [Google Scholar] [CrossRef]
- Borio, D.; Gioia, C. Interference mitigation: Impact on GNSS timing. GPS Solut. 2021, 25, 1–18. [Google Scholar] [CrossRef]
- Gioia, C.; Borio, D. Interference Mitigation and T-RAIM for Robust GNSS Timing. In Proceedings of the 2021 IEEE 8th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Naples, Italy, 23–25 June 2021; pp. 300–304. [Google Scholar] [CrossRef]
- Borio, D.; Closas, P. Robust Transform Domain Signal Processing for GNSS. Navig. J. Inst. Navig. 2019, 66, 305–323. [Google Scholar] [CrossRef] [Green Version]
- Borio, D.; Gioia, C. Real-time jamming detection using the sum-of-squares paradigm. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS), Gothenburg, Sweden, 22–24 June 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Kuusniemi, H.; Wieser, A.; Lachapelle, G.; Takala, J. User-level reliability monitoring in urban personal satellite-navigation. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1305–1318. [Google Scholar] [CrossRef]
- Gioia, C. GNSS Navigation in Difficult Environments: Hybridization and Reliability. Ph.D. Thesis, University Parthenope of Naples, Naples, Italy, 2014. [Google Scholar]
- Zhu, N.; Bétaille, D.; Marais, J.; Berbineau, M. GNSS Integrity Enhancement for Urban Transport Applications by Error Characterization and Fault Detection and Exclusion (FDE). In Proceedings of the Geolocation and Navigation in Space and Time, Paris, France, 28–29 March 2018; Available online: https://hal.archives-ouvertes.fr/hal-01757326v2 (accessed on 14 November 2021).
- Walter, T.; Enge, P. Weighted RAIM for Precision Approach; ION GPS; Institute of Navigation: Palm Springs, CA, USA, 1995; pp. 1995–2004. [Google Scholar]
- Ahmad, K.A.B. Reliability Monitoring of GNSS Aided Positioning for Land Vehicle Applications in Urban Environments. Ph.D. Thesis, Institut Supérieur de l’Aéronautique et de l’Espace, Toulouse, France, 2015. [Google Scholar]
- Borio, D.; Gioia, C. Galileo: The Added Value for Integrity in Harsh Environments. Sensors 2016, 16, 111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kaplan, E.D.; Hegarty, C. (Eds.) Understanding GPS: Principles and Applications, 2nd ed.; Artech House, Inc.: Norwood, MA, USA, 2005. [Google Scholar]
- Francisco, S.G. GPS operational control segment. In Global Positioning System Theory and Applications; Parkinson, B.W., Spilker, J.J., Jr., Eds.; American Institute of Aeronautics & Astronautics: Washington, DC, USA, 1996; Volume 1. [Google Scholar]
- Hewitson, S.; Wang, J. GNSS receiver autonomous integrity monitoring (RAIM) performance analysis. GPS Solut. 2006, 10, 155–170. [Google Scholar] [CrossRef]
- Allan, D.W. Statistics of atomic frequency standards. Proc. IEEE 1966, 54, 221–230. [Google Scholar] [CrossRef] [Green Version]
- Gioia, C.; Borio, D. A statistical characterization of the Galileo-to-GPS inter-system bias. J. Geod. 2016, 90, 1279–1291. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | Variation Sat Used | Variation TPL (ns) | ||
|---|---|---|---|---|
| Mean | Max | Mean | Max | |
| FDCS + T-RAIM | 0.11 | 1 | 3.45 | 19.22 |
| FDCS + PLI + T-RAIM | 0.13 | 5 | 3.50 | 22.11 |
| TDCS + T-RAIM | 0.40 | 2 | 0.73 | 15.39 |
| TDCS + PLI + T-RAIM | 0.44 | 5 | 0.91 | 21.01 |
| FDPB + T-RAIM | 0.92 | 4 | 4.53 | 19.02 |
| FDPB + PLI + T-RAIM | 1.01 | 5 | 4.70 | 25.51 |
| TDPB + T-RAIM | 0.41 | 1 | 0.42 | 17.76 |
| TDPB + PLI + T-RAIM | 0.66 | 5 | 0.73 | 21.41 |
| No Mit + T-RAIM | 0.04 | 2 | 3.4 | 18.59 |
| No Mit + PLI + T-RAIM | 0.14 | 5 | 3.6 | 23.21 |
| Configuration | Variation Sat Used | Variation TPL (ns) | ||
|---|---|---|---|---|
| Mean | Max | Mean | Max | |
| FDCS + T-RAIM | 0.03 | 1 | 0.20 | 3.98 |
| FDCS + PLI + T-RAIM | 0.10 | 1 | 0.28 | 3.96 |
| TDCS + T-RAIM | 0.16 | 1 | 0.27 | 6.06 |
| TDCS + PLI + T-RAIM | 0.28 | 1 | 0.71 | 20.66 |
| FDPB + T-RAIM | 0.04 | 2 | 0.43 | 17.53 |
| FDPB + PLI + T-RAIM | 0.05 | 2 | 0.67 | 20.62 |
| TDPB + T-RAIM | 0.05 | 2 | 0.13 | 6.07 |
| TDPB + PLI + T-RAIM | 0.06 | 2 | 0.26 | 20.70 |
| No Mit + T-RAIM | 0.06 | 2 | 0.61 | 17.62 |
| No Mit + PLI + T-RAIM | 0.22 | 3 | 1.24 | 20.60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gioia, C.; Borio, D. Multi-Layer Defences for Robust GNSS Timing Retrieval. Sensors 2021, 21, 7787. https://doi.org/10.3390/s21237787
Gioia C, Borio D. Multi-Layer Defences for Robust GNSS Timing Retrieval. Sensors. 2021; 21(23):7787. https://doi.org/10.3390/s21237787
Chicago/Turabian StyleGioia, Ciro, and Daniele Borio. 2021. "Multi-Layer Defences for Robust GNSS Timing Retrieval" Sensors 21, no. 23: 7787. https://doi.org/10.3390/s21237787
APA StyleGioia, C., & Borio, D. (2021). Multi-Layer Defences for Robust GNSS Timing Retrieval. Sensors, 21(23), 7787. https://doi.org/10.3390/s21237787