
New Results on Small and Dim Infrared Target Detection



Abstract
:1. Introduction
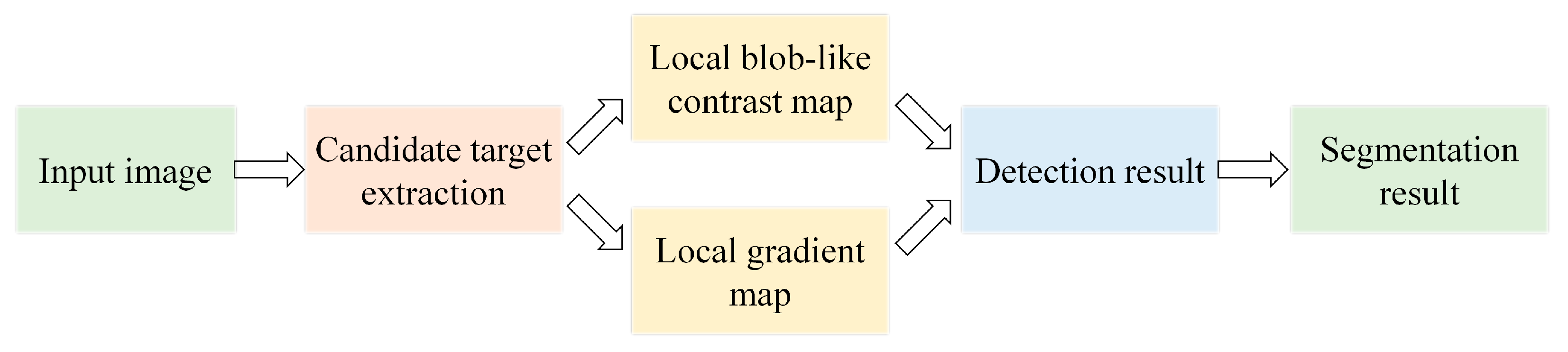
2. Detection Based on the Local Contrast and Gradient Feature
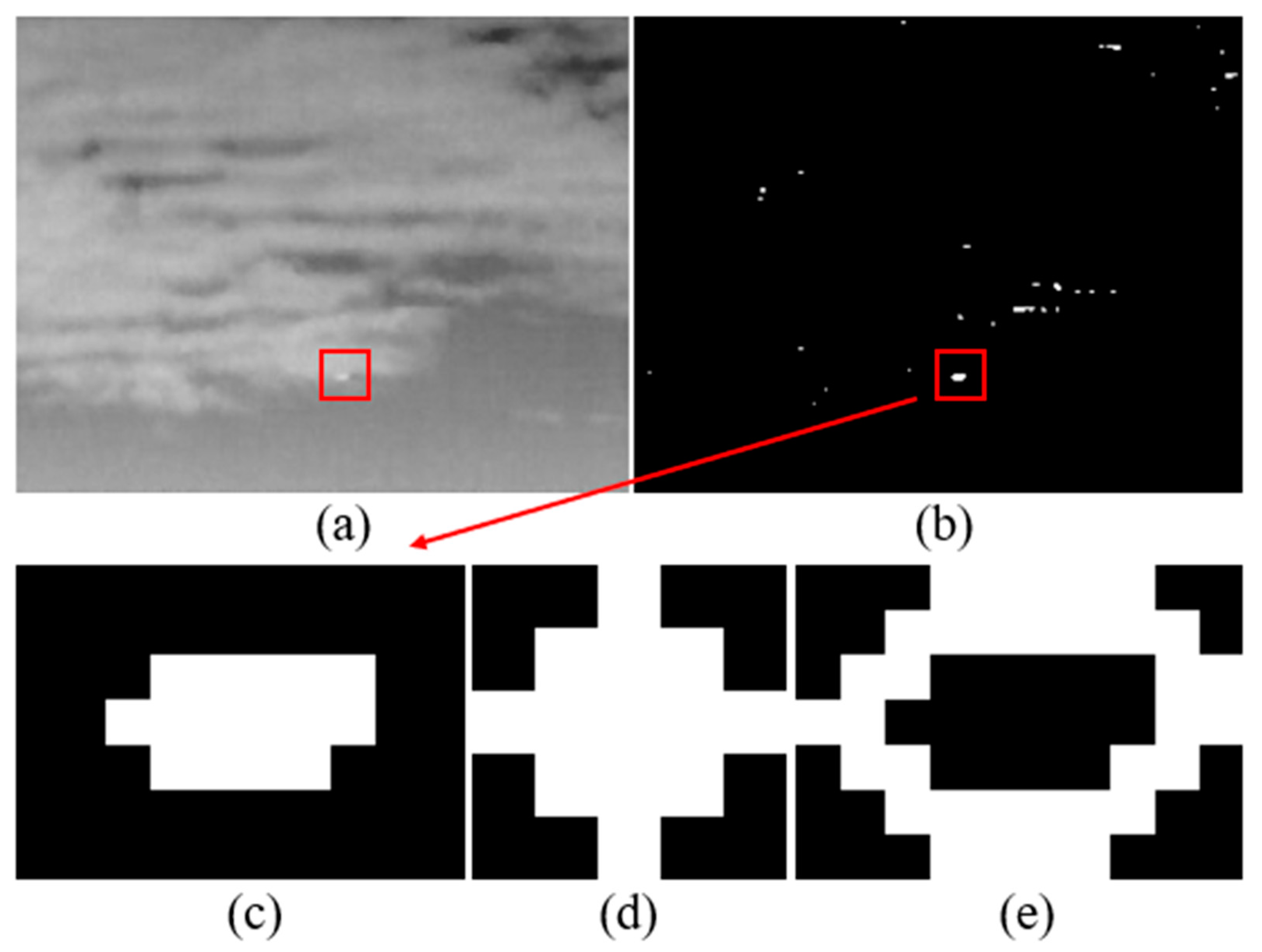
2.1. Pre-Processing and Binary Mask Generation
| Algorithm 1. Pseudocode for Binarized Mask Calculation. |
| Input: The DoG filtering result , p = 0.2%, gray dynamic range N |
| Output: The binarized mask |
|
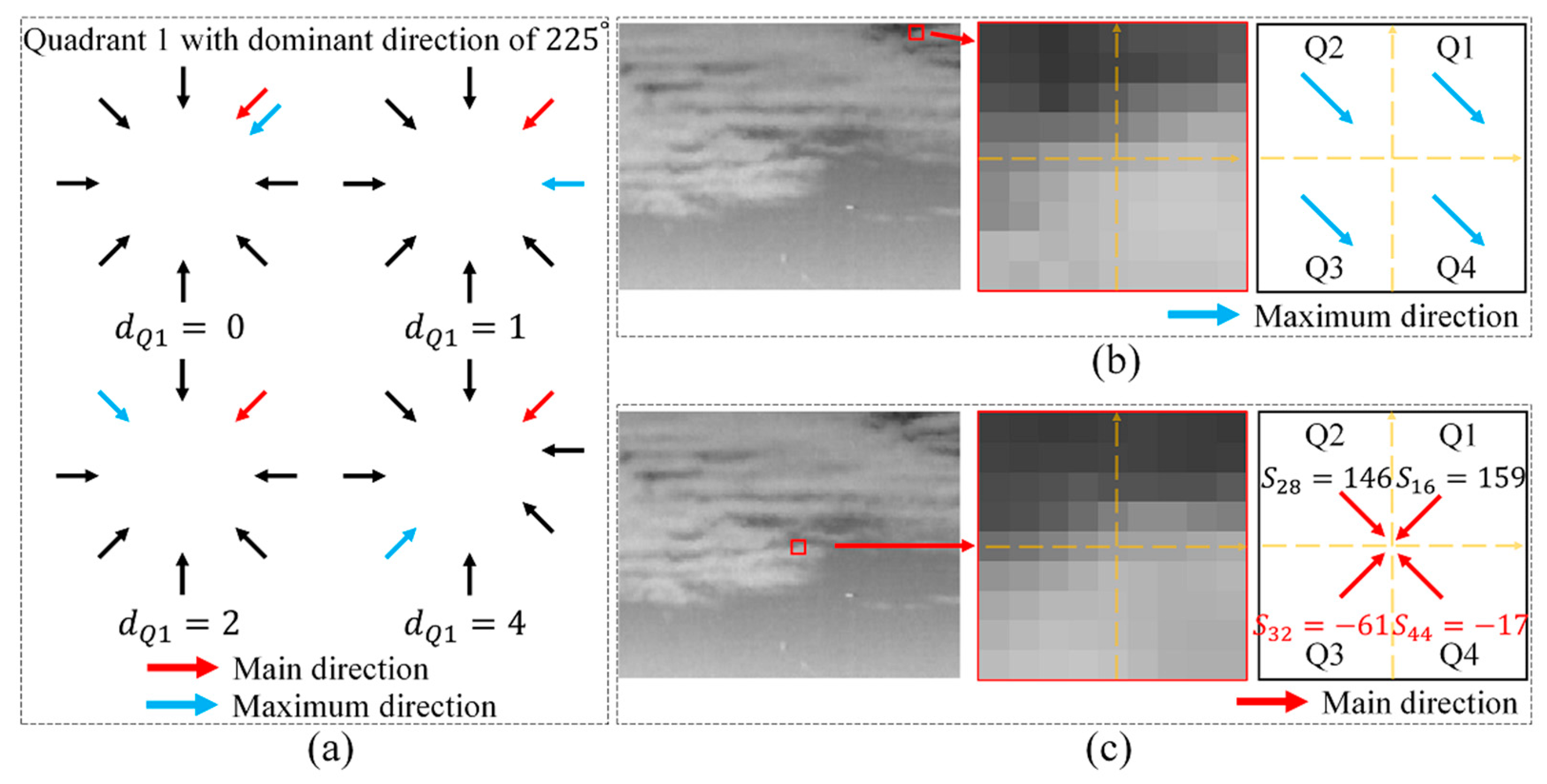
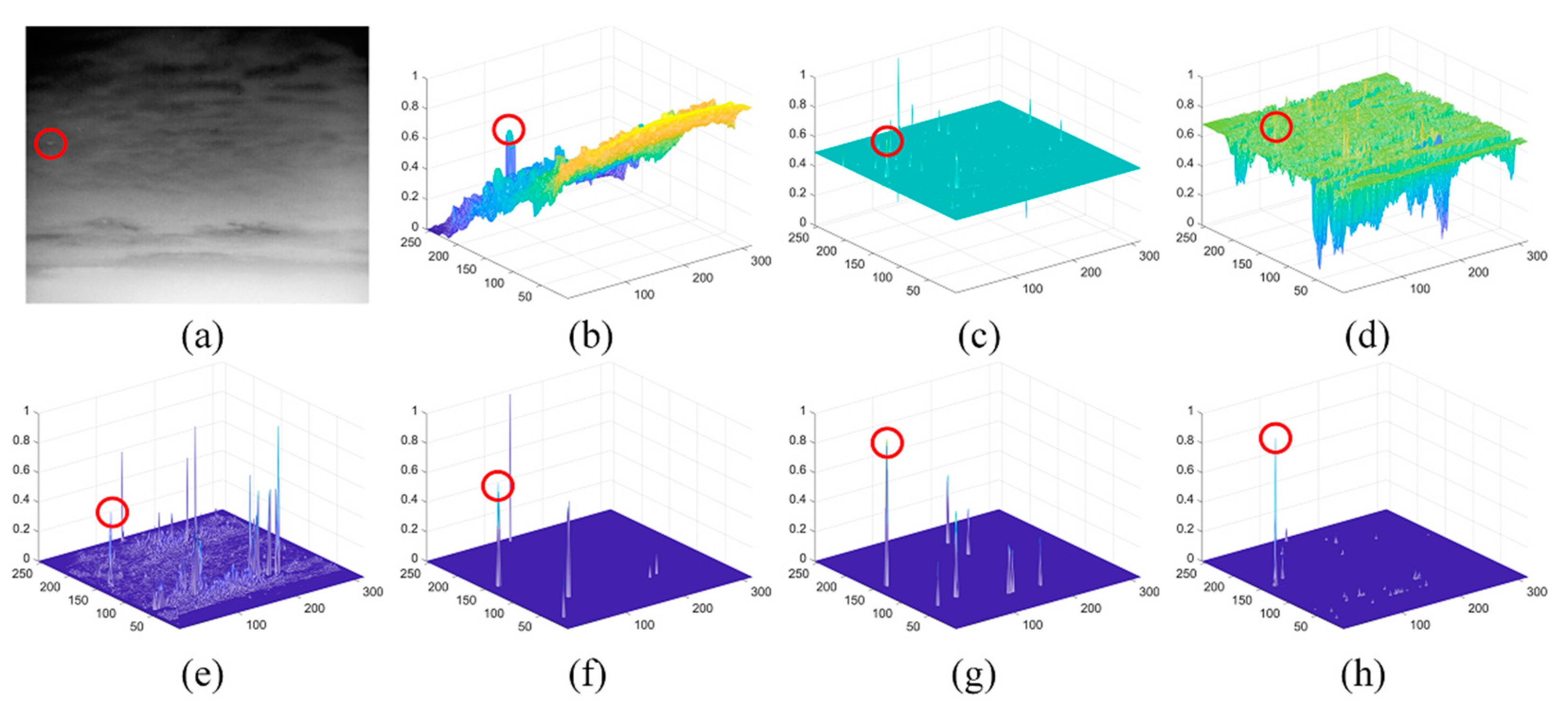
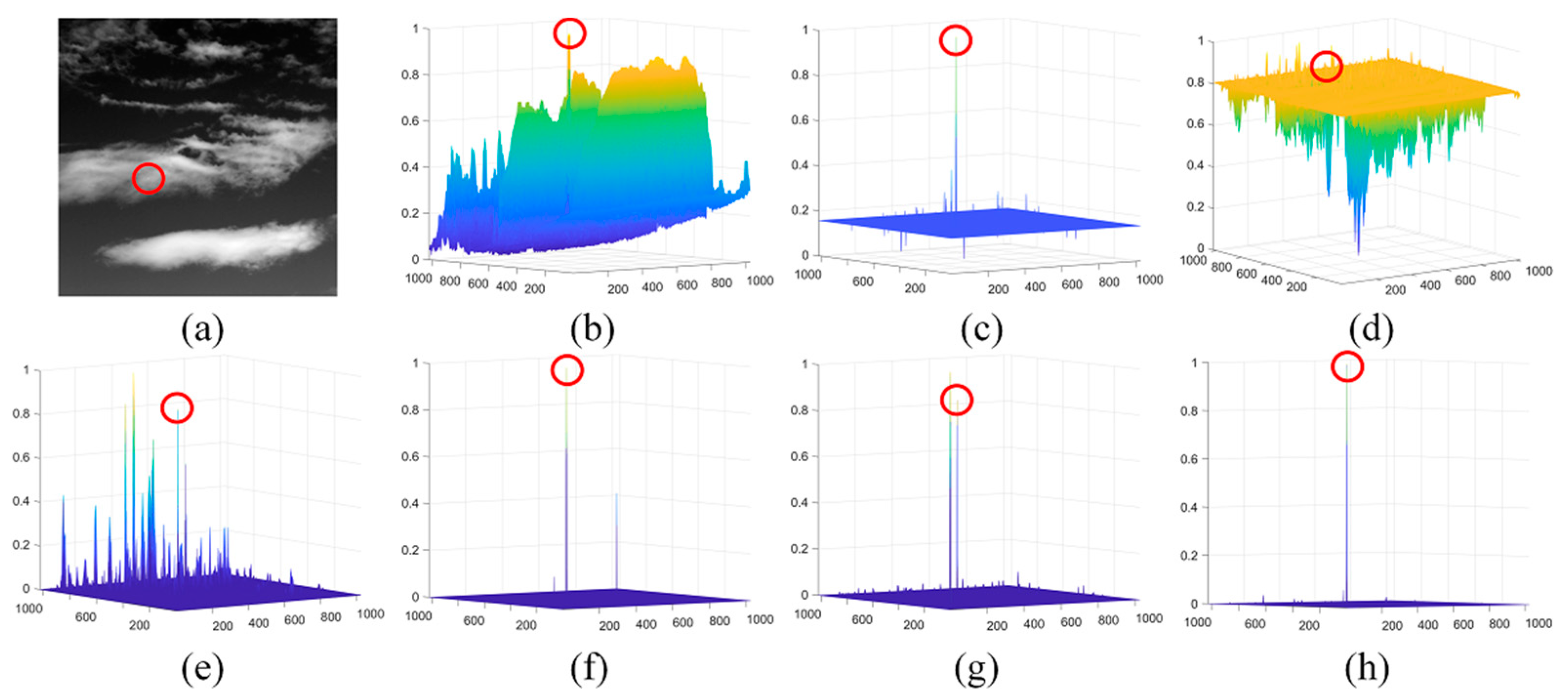
2.2. Local Blob-like Contrast Map
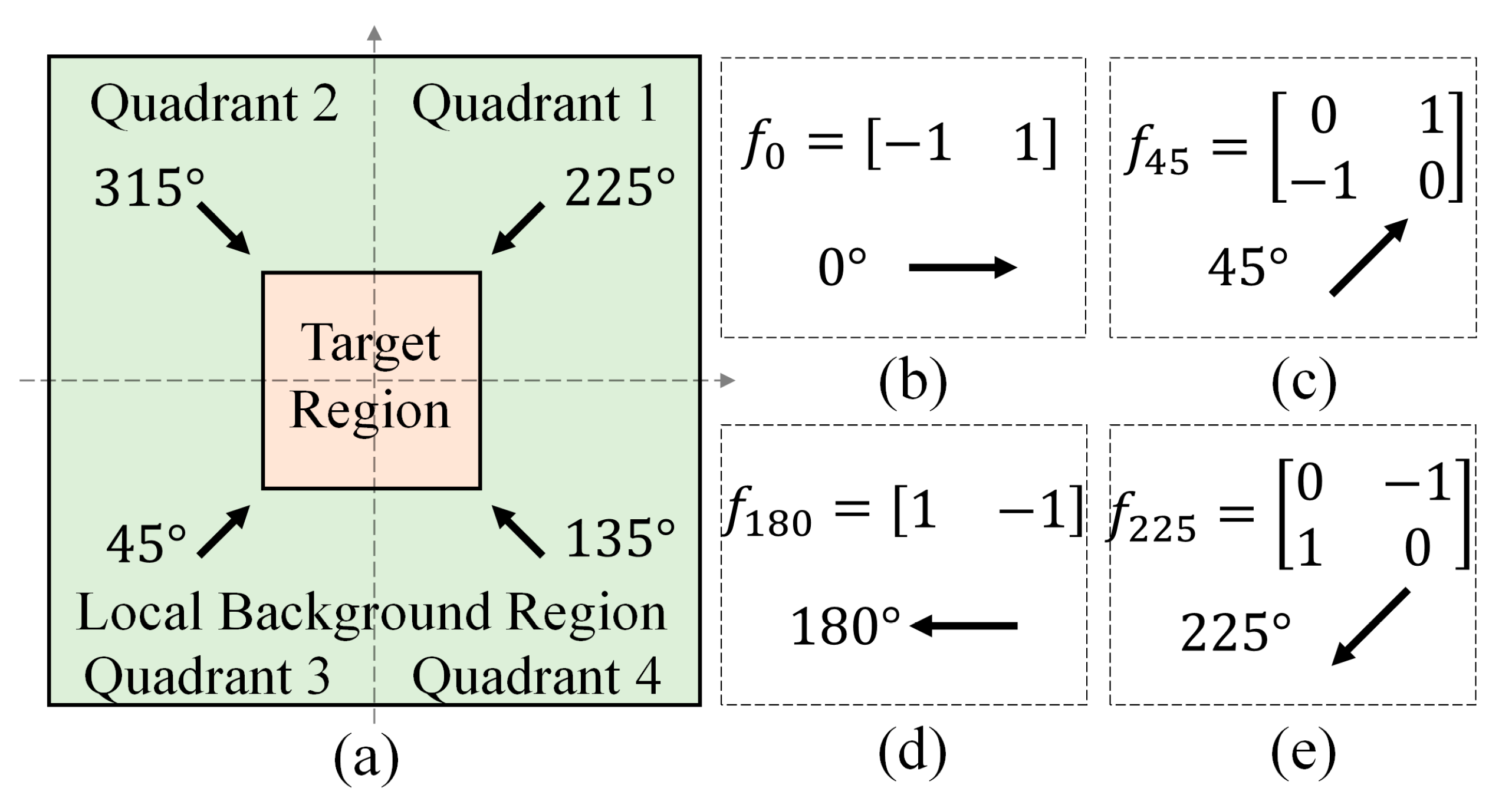
2.3. Local Gradient Map
2.4. Fusion and Segmentation
3. Experiments and Discussions
3.1. Motivation and Preparation for the Experiments
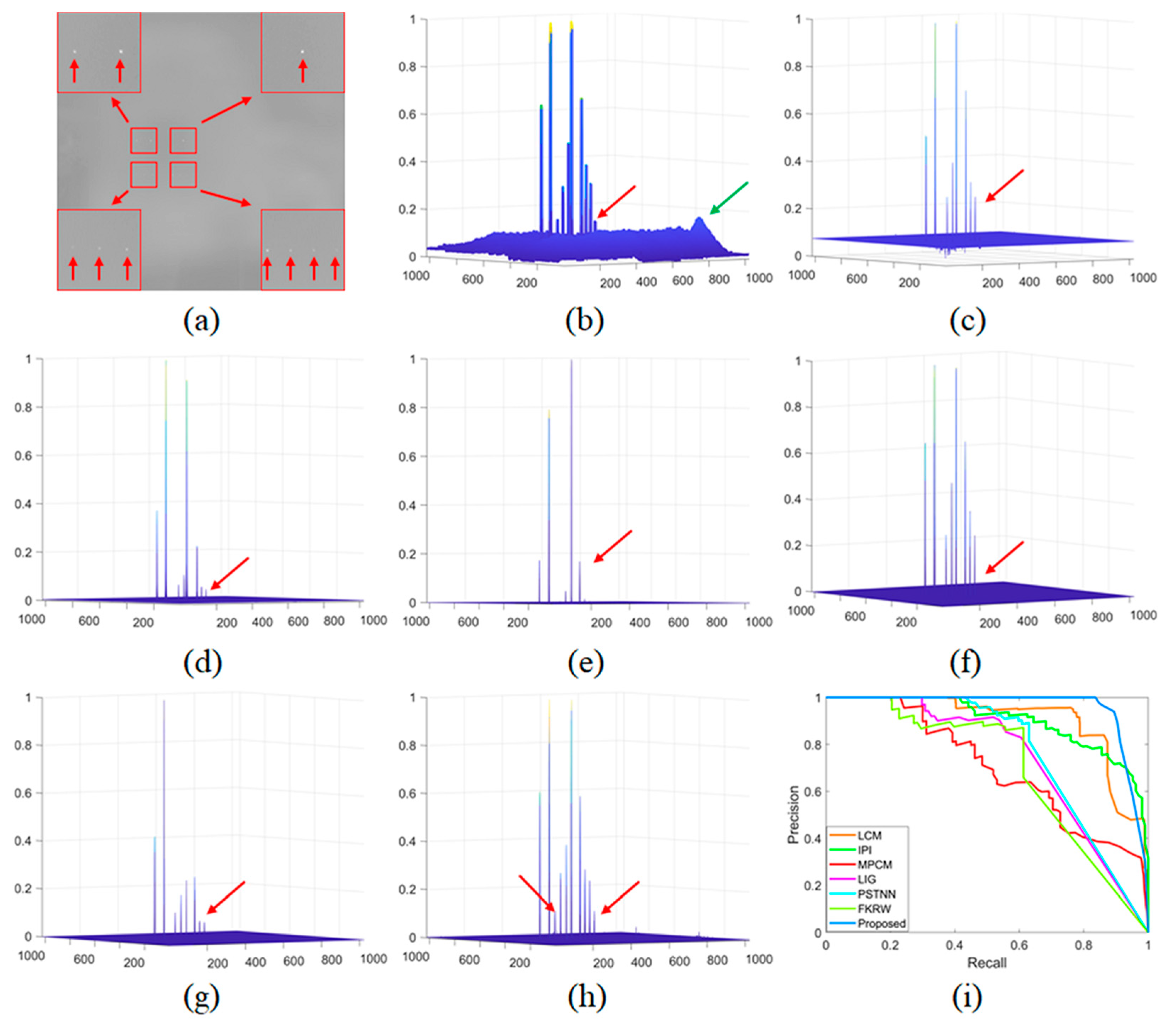
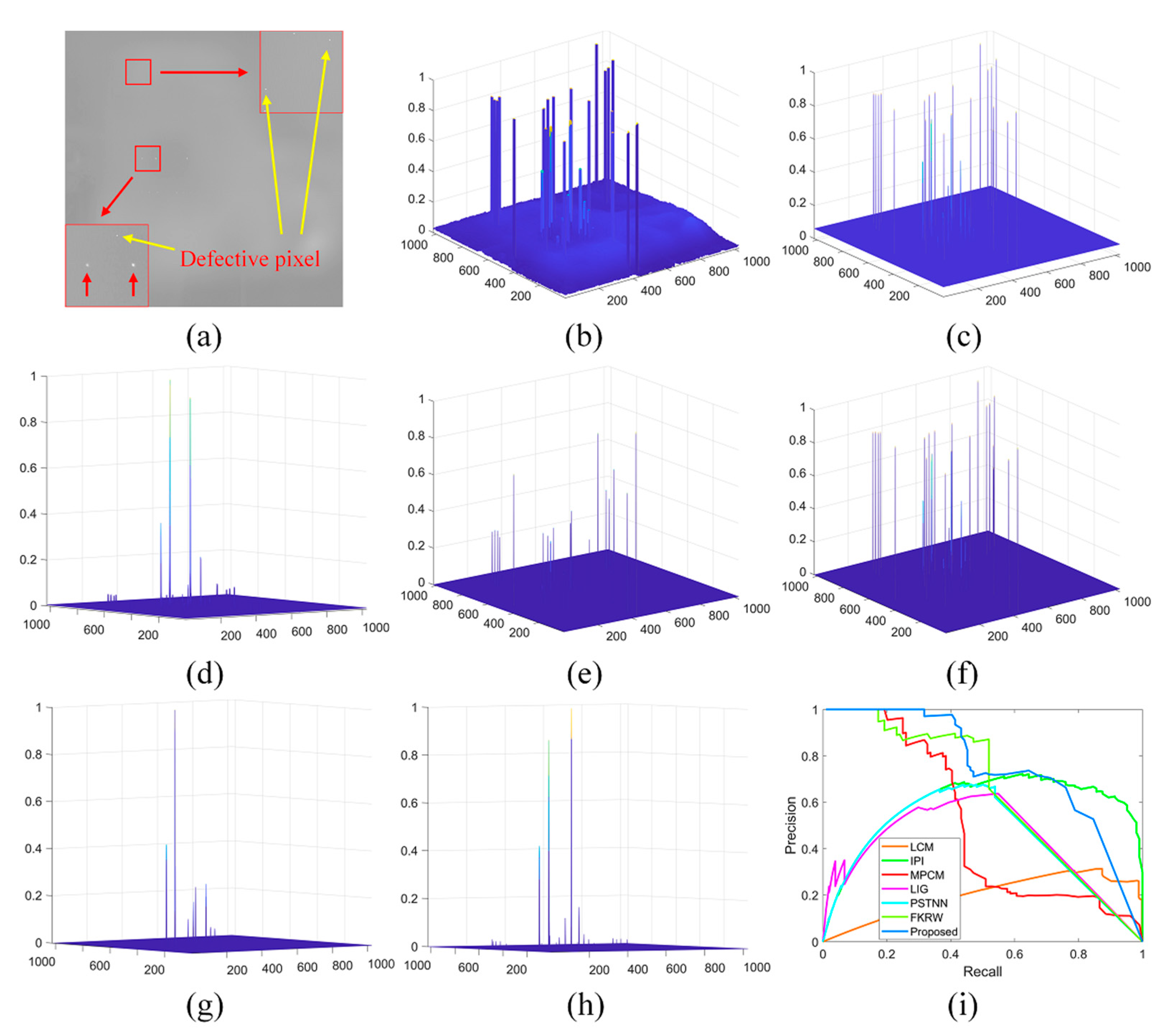
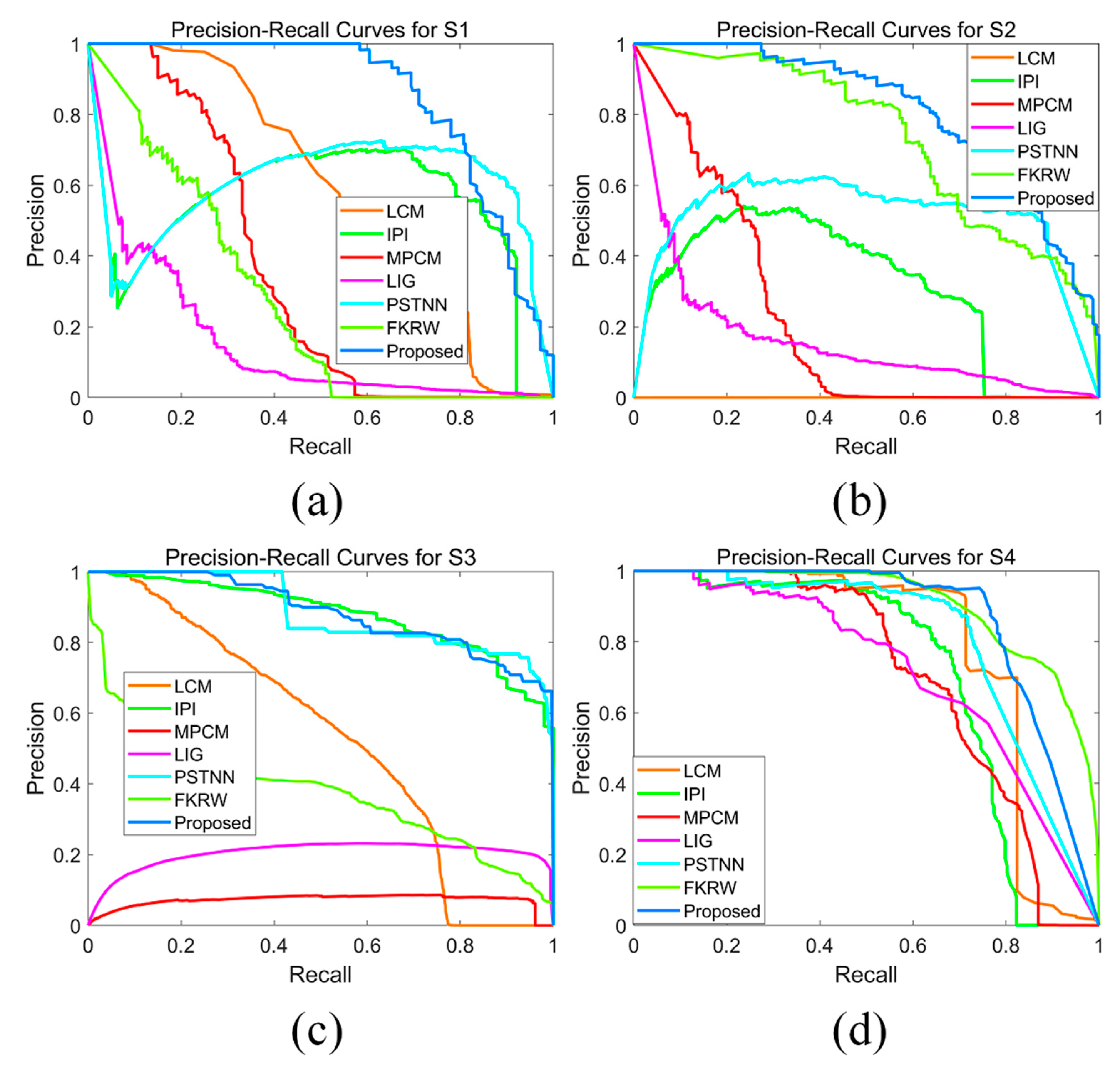
3.2. Comparison of Single-Pixel Target Detection Performance
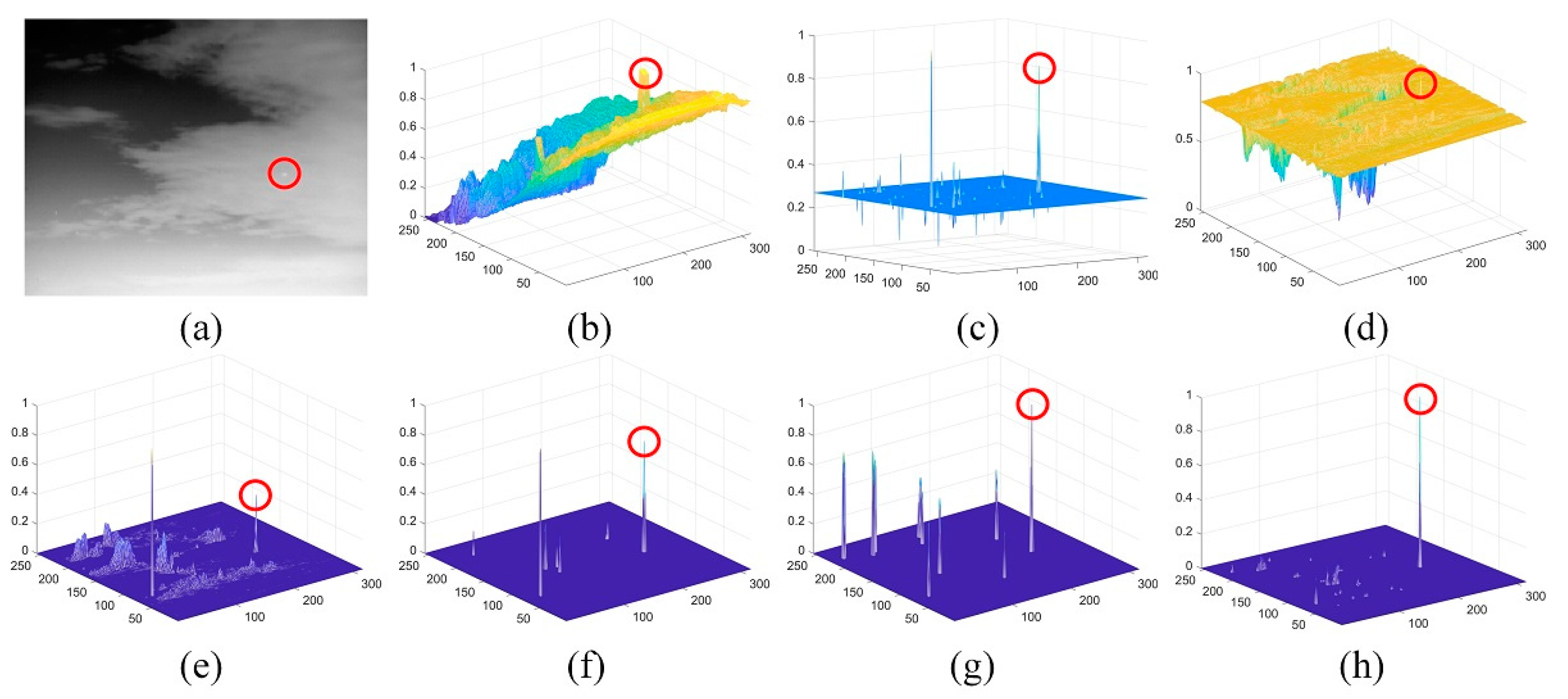
3.3. Comparison of Sequence Detection Performance
3.4. Merits and Limitations
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rogalski, A. New material systems for third generation infrared detectors. Ninth Int. Conf. Correl. Opt. 2009, 7388, 73880. [Google Scholar]
- Dai, Y.; Wu, Y.; Zhou, F.; Barnard, K. Attentional local contrast networks for infrared small target detection. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9813–9824. [Google Scholar] [CrossRef]
- Zhao, B.; Wang, C.; Fu, Q.; Han, Z. A Novel Pattern for Infrared Small Target Detection With Generative Adversarial Network. IEEE Trans. Geosci. Remote Sens. 2020, 59, 4481–4492. [Google Scholar] [CrossRef]
- Hou, Q.; Wang, Z.; Tan, F.; Zhao, Y.; Zheng, H.; Zhang, W. RISTDnet: Robust Infrared Small Target Detection Network. IEEE Geosci. Remote Sens. Lett. 2021, 1–5. [Google Scholar] [CrossRef]
- Reibel, Y.; Espuno, L.; Taalat, R.; Sultan, A.; Cassaigne, P.; Matallah, N. High performance infrared fast cooled detectors for missile applications. Infrared Technol. Appl. XLII 2016, 9819, 98190I. [Google Scholar]
- Deshpande, S.D.; Er, M.H.; Venkateswarlu, R.; Chan, P. Max-mean and max-median filters for detection of small targets. In Signal and Data Processing of Small Targets 1999; SPIE Press: Bellingham, DC, USA, 1999; Volume 3809, pp. 74–83. [Google Scholar]
- Cao, Y.; Liu, R.; Yang, J. Small target detection using Two-Dimensional Least Mean Square (TDLMS) filter based on neighborhood analysis. Int. J. Infrared Millim. Waves 2008, 29, 188–200. [Google Scholar] [CrossRef]
- Bai, X.; Zhou, F. Analysis of new top-hat transformation and the application for infrared dim small target detection. Pattern Recognit. 2010, 43, 2145–2156. [Google Scholar] [CrossRef]
- Bae, T.W.; Sohng, K.I. Small target detection using bilateral filter based on edge component. J. Infrared Millim. Terahertz Waves 2010, 31, 735–743. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptmann, A.G. Infrared patch-image model for small target detection in a single image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, L.; Zhang, T.; Cao, S.; Peng, Z. Infrared small target detection via non-convex rank approximation minimization joint l2,1 norm. Remote Sens. 2018, 10, 1821. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Peng, Z. Infrared small target detection based on partial sum of the tensor nuclear norm. Remote Sens. 2019, 11, 382. [Google Scholar] [CrossRef] [Green Version]
- Dai, Y.; Wu, Y.; Song, Y. Infrared small target and background separation via column-wise weighted robust principal component analysis. Infrared Phys. Technol. 2016, 77, 421–430. [Google Scholar] [CrossRef]
- Huang, S.; Peng, Z.; Wang, Z.; Wang, X.; Li, M. Infrared Small Target Detection by Density Peaks Searching and Maximum-Gray Region Growing. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1919–1923. [Google Scholar] [CrossRef]
- Qin, Y.; Bruzzone, L.; Gao, C.; Li, B. Infrared small target detection based on facet kernel and random walker. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7104–7118. [Google Scholar] [CrossRef]
- Kim, S.; Yang, Y.; Lee, J.; Park, Y. Small target detection utilizing robust methods of the human visual system for IRST. J. Infrared Millim. Terahertz Waves 2009, 30, 994–1011. [Google Scholar] [CrossRef]
- Wang, X.; Lv, G.; Xu, L. Infrared dim target detection based on visual attention. Infrared Phys. Technol. 2012, 55, 513–521. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Li, H.; Wei, Y.; Xia, T.; Tang, Y.Y. A local contrast method for small infrared target detection. IEEE Trans. Geosci. Remote Sens. 2014, 52, 574–581. [Google Scholar] [CrossRef]
- Wei, Y.; You, X.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recognit. 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.; Liu, M.; Ye, C.; Zhou, X. Small Infrared Target Detection Based on Weighted Local Difference Measure. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4204–4214. [Google Scholar] [CrossRef]
- Han, J.; Liang, K.; Zhou, B.; Zhu, X.; Zhao, J.; Zhao, L. Infrared Small Target Detection Utilizing the Multiscale Relative Local Contrast Measure. IEEE Geosci. Remote Sens. Lett. 2018, 15, 612–616. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, L.; Yuan, D.; Chen, H. Infrared small target detection based on local intensity and gradient properties. Infrared Phys. Technol. 2018, 89, 88–96. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, G.; Ma, Y.; Kang, J.U.; Kwan, C. Small Infrared Target Detection Based on Fast Adaptive Masking and Scaling With Iterative Segmentation. IEEE Geosci. Remote Sens. Lett. 2021. [Google Scholar] [CrossRef]
- Winnemöller, H.; Kyprianidis, J.E.; Olsen, S.C. XDoG: An eXtended difference-of-Gaussians compendium including advanced image stylization. Comput. Graph. 2012, 36, 740–753. [Google Scholar] [CrossRef] [Green Version]
- Netsch, T.; Peitgen, H.O. Scale-space signatures for the detection of clustered microcalcifications in digital mammograms. IEEE Trans. Med. Imaging 1999, 18, 774–786. [Google Scholar] [CrossRef]
- Xie, Y.; Mao, X.; Li, J.; Wang, F.; Wang, P.; Gao, R.; Li, X.; Ren, S.; Xu, Z.; Dong, R. Optical design and fabrication of an all-aluminum unobscured two-mirror freeform imaging telescope. Appl. Opt. 2020, 59, 833. [Google Scholar] [CrossRef]
- Buckland, M.; Gey, F. The relationship between Recall and Precision. J. Am. Soc. Inf. Sci. 1994, 45, 12–19. [Google Scholar] [CrossRef]
- Davis, J.; Goadrich, M. The relationship between Precision-Recall and ROC curves. In Proceedings of the 23rd International Conference on Machine Learning, New York, NY, USA, 25–29 June 2006; pp. 233–240. [Google Scholar]
- Saito, T.; Rehmsmeier, M. The precision-recall plot is more informative than the ROC plot when evaluating binary classifiers on imbalanced datasets. PLoS ONE 2015, 10, e0118432. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequences | Frame Number | Resolution | Background Description | Target Characteristics |
|---|---|---|---|---|
| S1 | 100 | 320 × 256 | Strong cloud | Aircraft with a size of 4 × 3 |
| S2 | 100 | 320 × 256 | Strong cloud with higher gray level | Dim aircraft with a size of 4 × 2 |
| S3 | 50 | 1024 × 1024 | Strong cloud with irregular shape | Aircraft with a size of 4 × 3 |
| S4 | 50 | 640 × 512 | Cloudy background | birds with size of around 3 × 3 |
| LCM | IPI | MPCM | LIG | PSTNN | FKRW | Proposed | ||
|---|---|---|---|---|---|---|---|---|
| Area Under Curve (AUC) | S1 | 0.5763 | 0.5442 | 0.3461 | 0.1493 | 0.5963 | 0.2678 | 0.8532 |
| S2 | 0.0001 | 0.3059 | 0.2168 | 0.1610 | 0.5058 | 0.7339 | 0.8112 | |
| S3 | 0.5032 | 0.8780 | 0.0706 | 0.2014 | 0.8819 | 0.3773 | 0.8835 | |
| S4 | 0.7892 | 0.7075 | 0.6716 | 0.7179 | 0.8082 | 0.9050 | 0.8678 | |
| mean | 0.4672 | 0.6089 | 0.3263 | 0.3074 | 0.6981 | 0.5710 | 0.8539 |
| LCM | IPI | MPCM | LIG | PSTNN | FKRW | Proposed | ||
|---|---|---|---|---|---|---|---|---|
| Running time (s) | S1 | 0.035 | 9.227 | 0.048 | 1.726 | 0.028 | 0.141 | 0.024 |
| S2 | 0.038 | 7.913 | 0.047 | 1.702 | 0.027 | 0.075 | 0.025 | |
| S3 | 0.546 | 854.3 | 0.734 | 24.52 | 2.153 | 1.201 | 0.262 | |
| S4 | 0.141 | 374.6 | 0.201 | 7.386 | 0.108 | 0.152 | 0.079 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhao, Z.; Kwan, C.; Zhou, G.; Chen, Y. New Results on Small and Dim Infrared Target Detection. Sensors 2021, 21, 7746. https://doi.org/10.3390/s21227746
Wang H, Zhao Z, Kwan C, Zhou G, Chen Y. New Results on Small and Dim Infrared Target Detection. Sensors. 2021; 21(22):7746. https://doi.org/10.3390/s21227746
Chicago/Turabian StyleWang, Hao, Zehao Zhao, Chiman Kwan, Geqiang Zhou, and Yaohong Chen. 2021. "New Results on Small and Dim Infrared Target Detection" Sensors 21, no. 22: 7746. https://doi.org/10.3390/s21227746
APA StyleWang, H., Zhao, Z., Kwan, C., Zhou, G., & Chen, Y. (2021). New Results on Small and Dim Infrared Target Detection. Sensors, 21(22), 7746. https://doi.org/10.3390/s21227746