
Computational Large Field-of-View RGB-D Integral Imaging System



Abstract
:1. Introduction
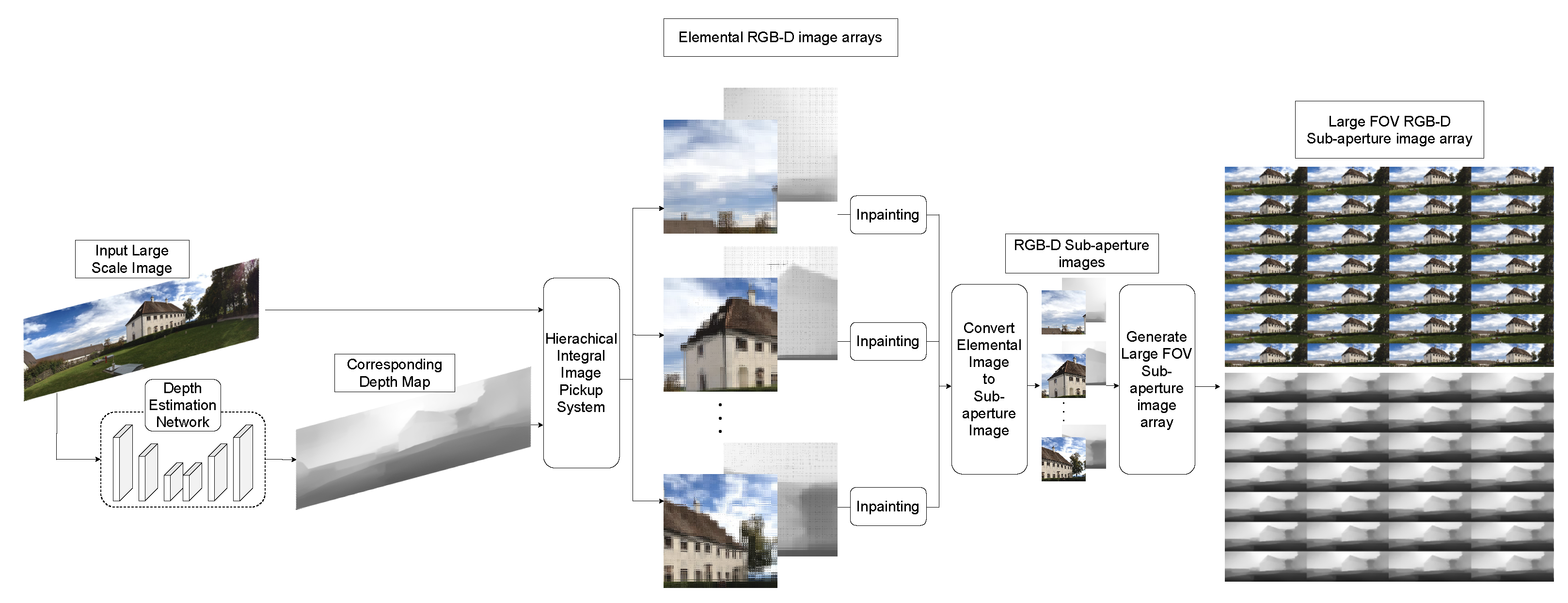
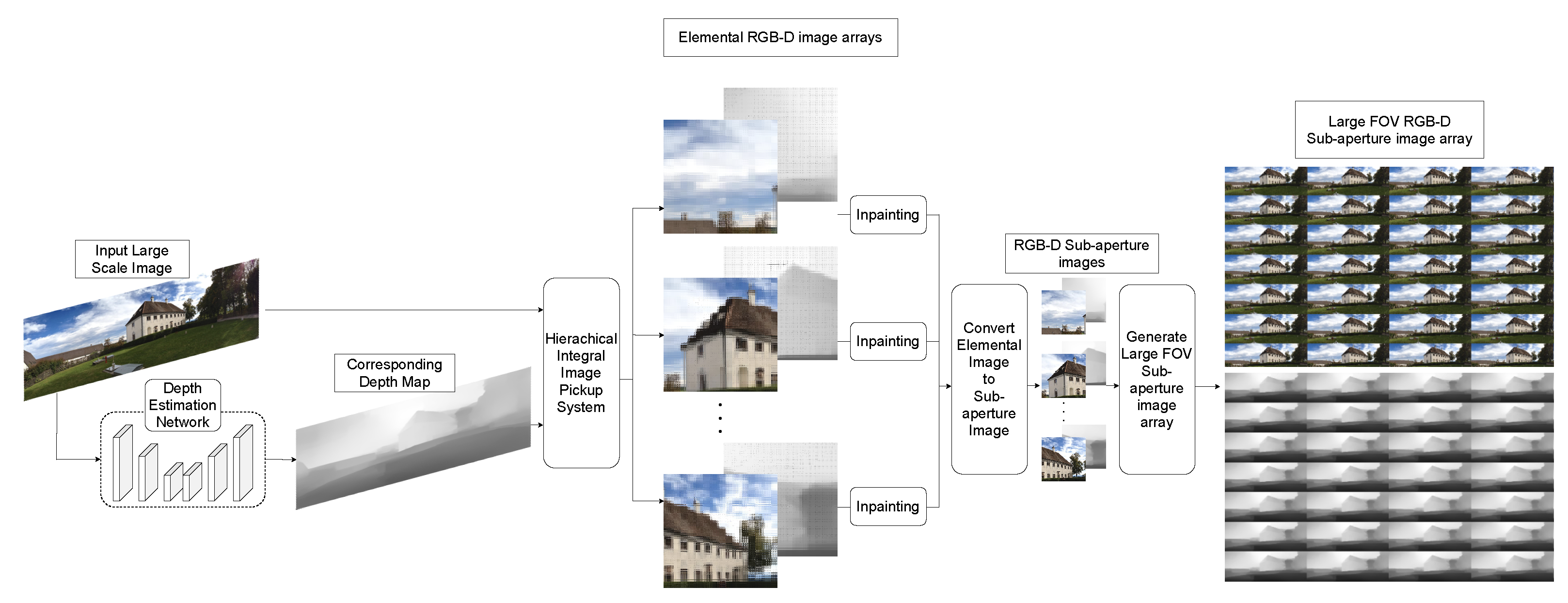
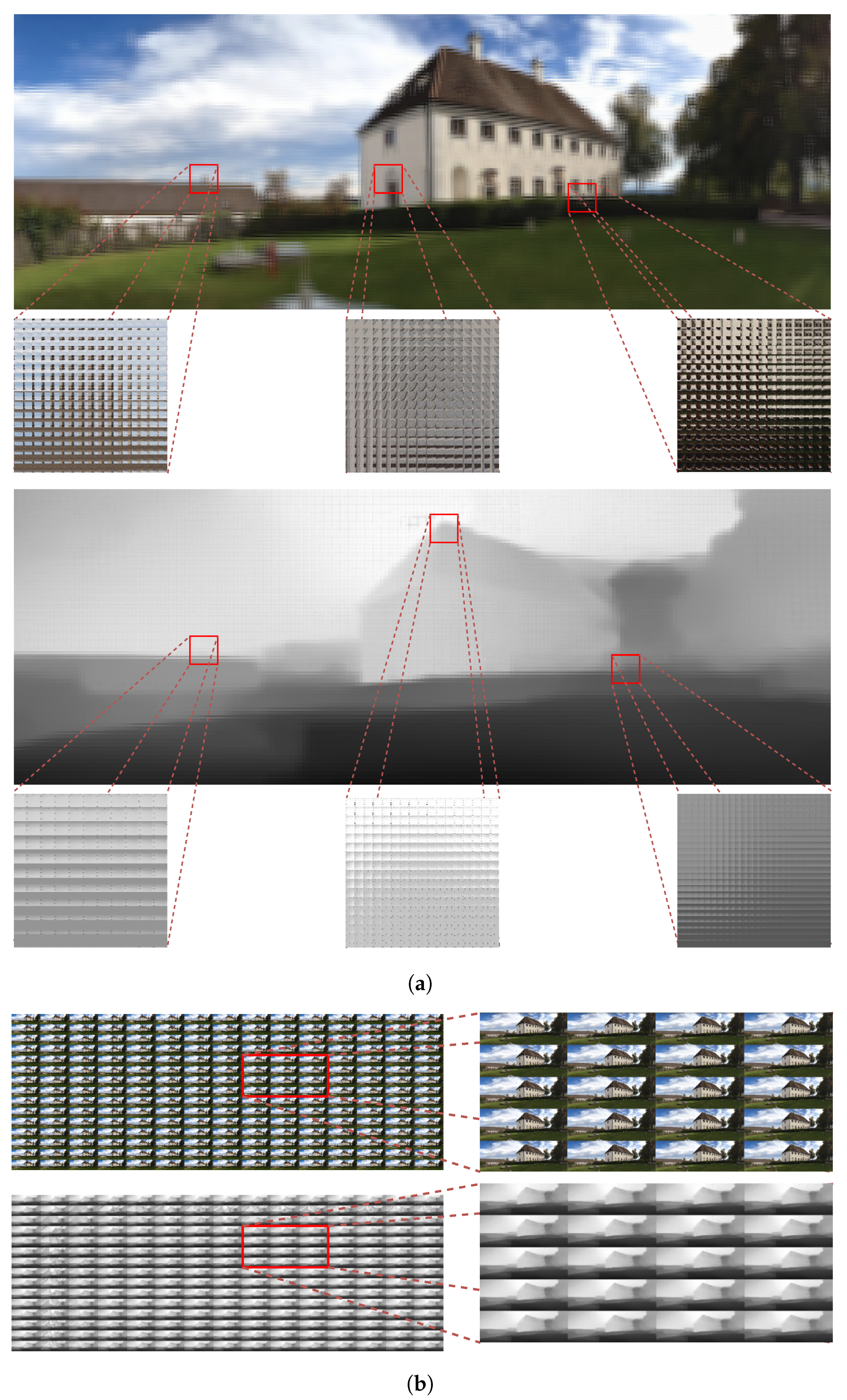
- We present an end-to-end computational large-FOV RGB-D integral imaging pickup system from single input images using a hierarchical integral imaging pickup procedure;
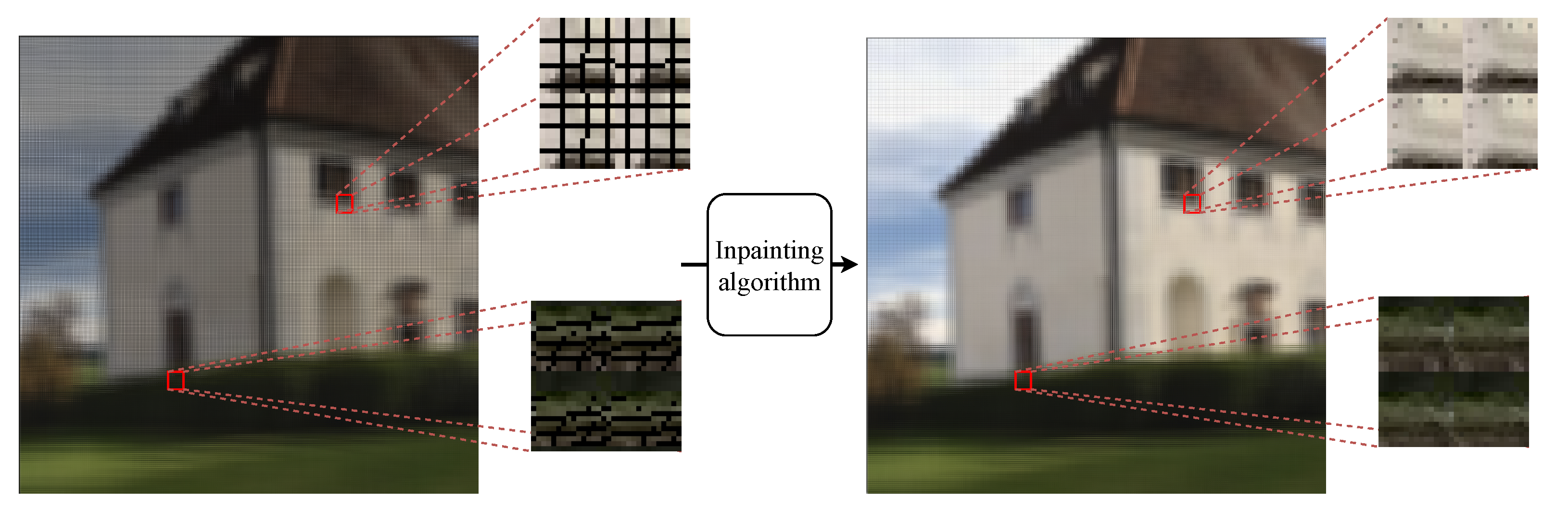
- The proposed RGB and depth integral imaging pickup system computationally eliminates the distortion of elemental images and contamination;
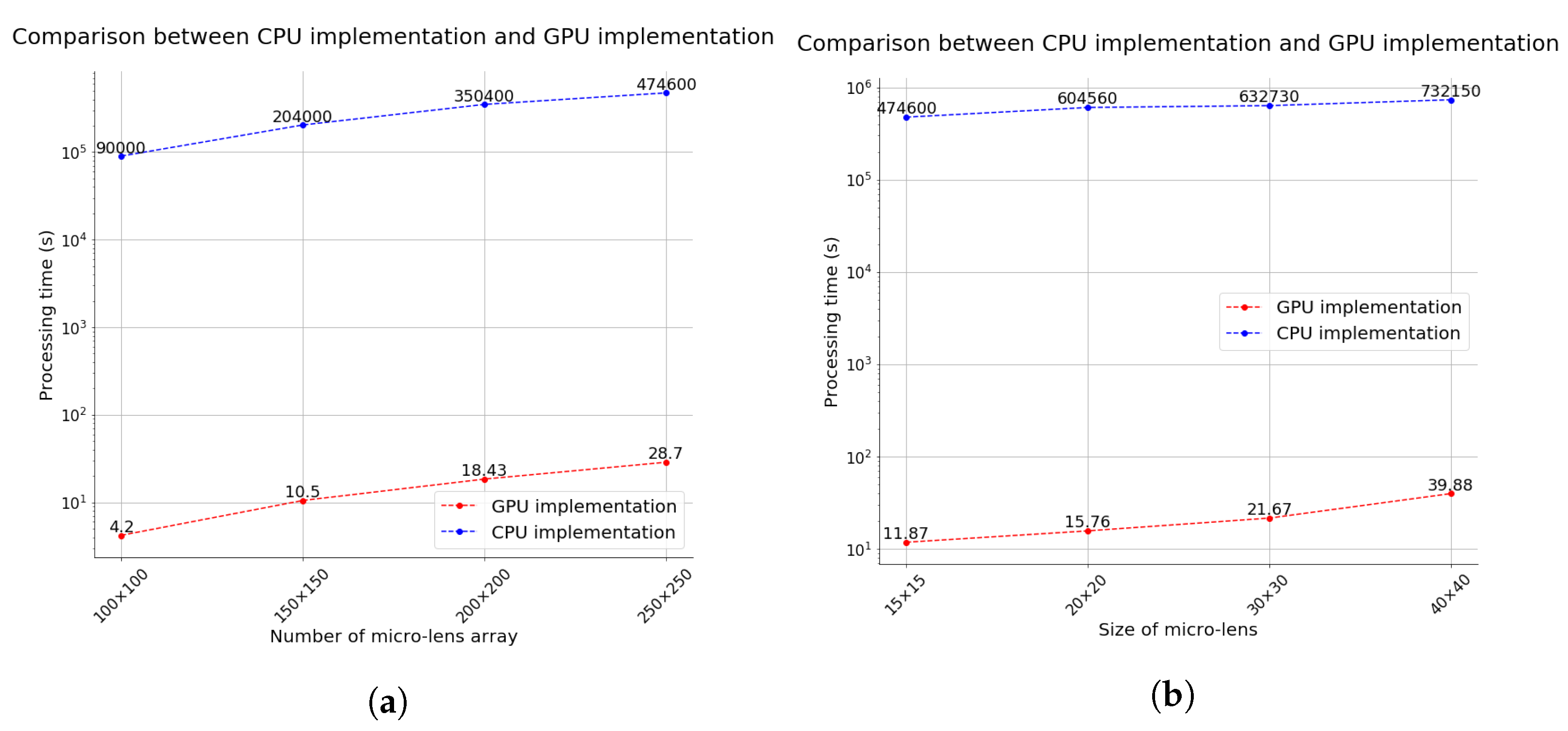
- We present quantitative and qualitative analyses for the proposed method to be applied to various applications in real time.
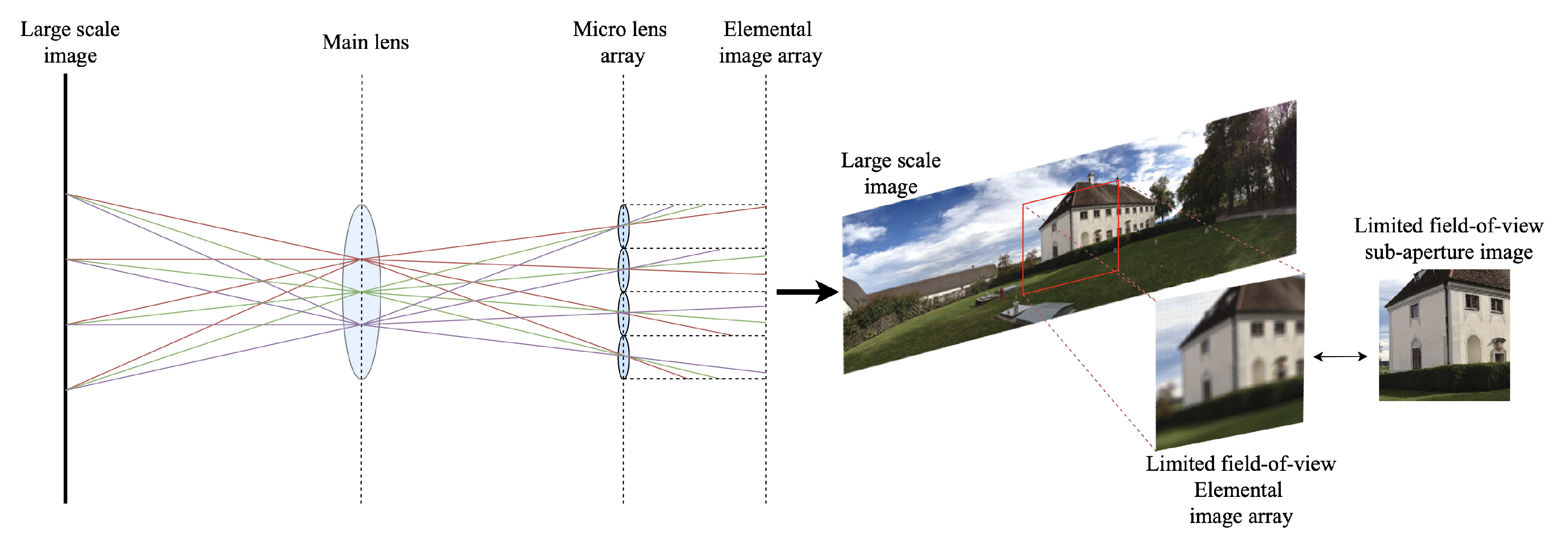
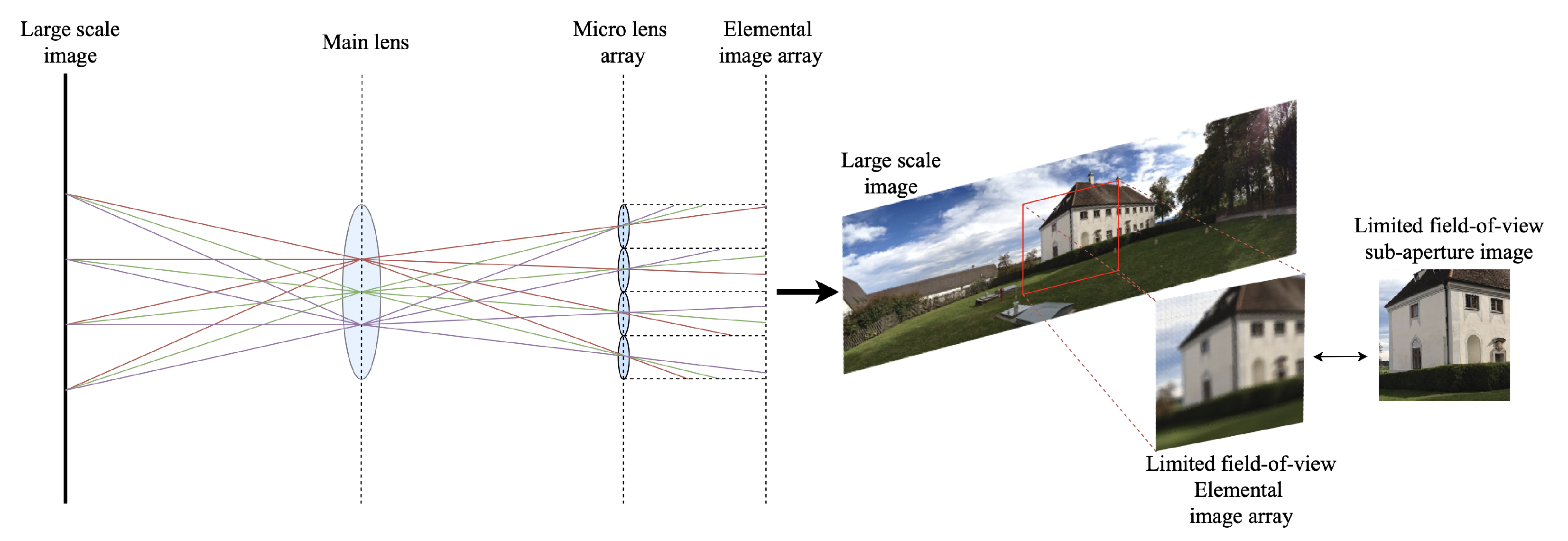
2. Large-Field-of-View Rgb-D Integral Imaging System
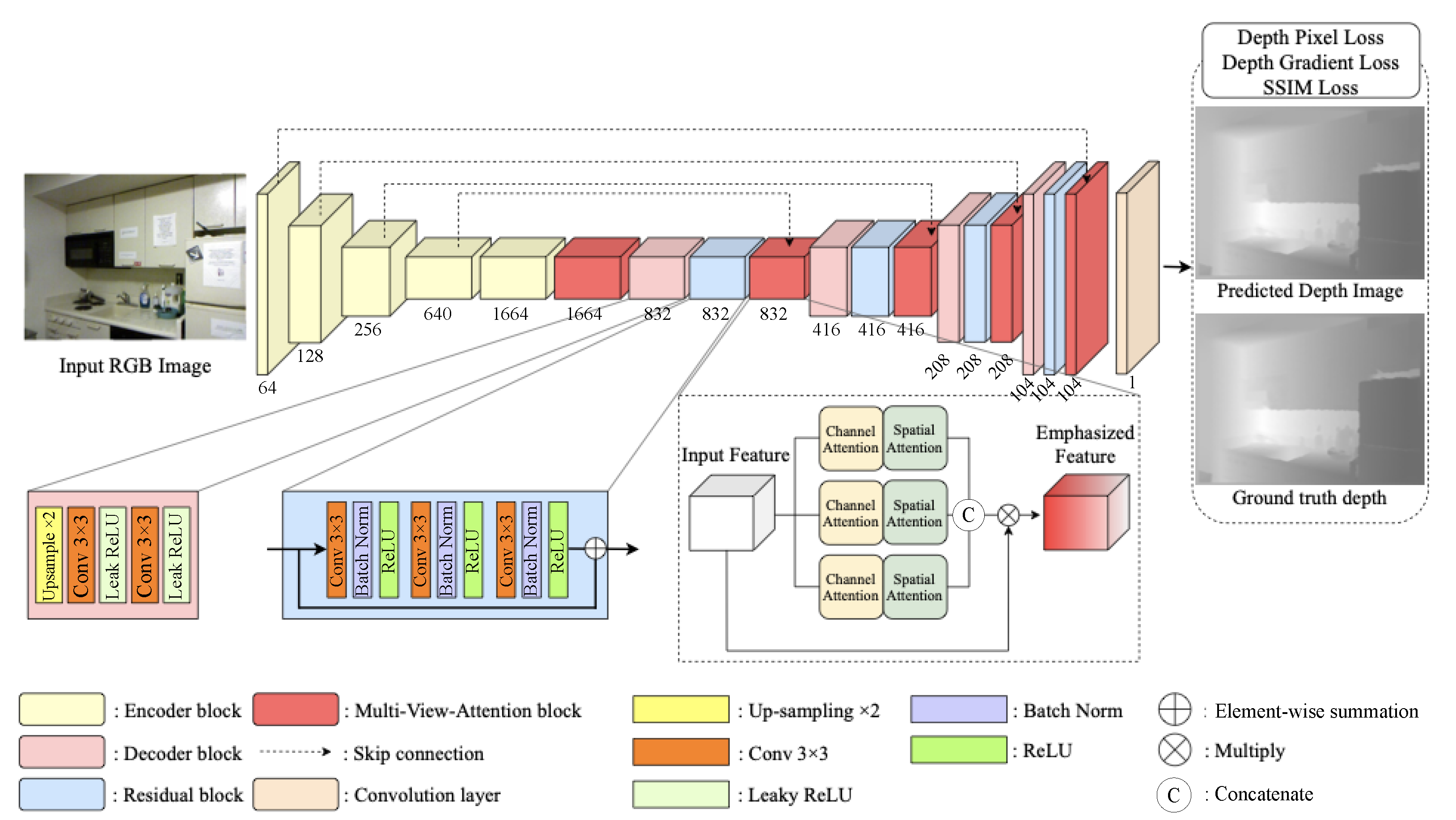
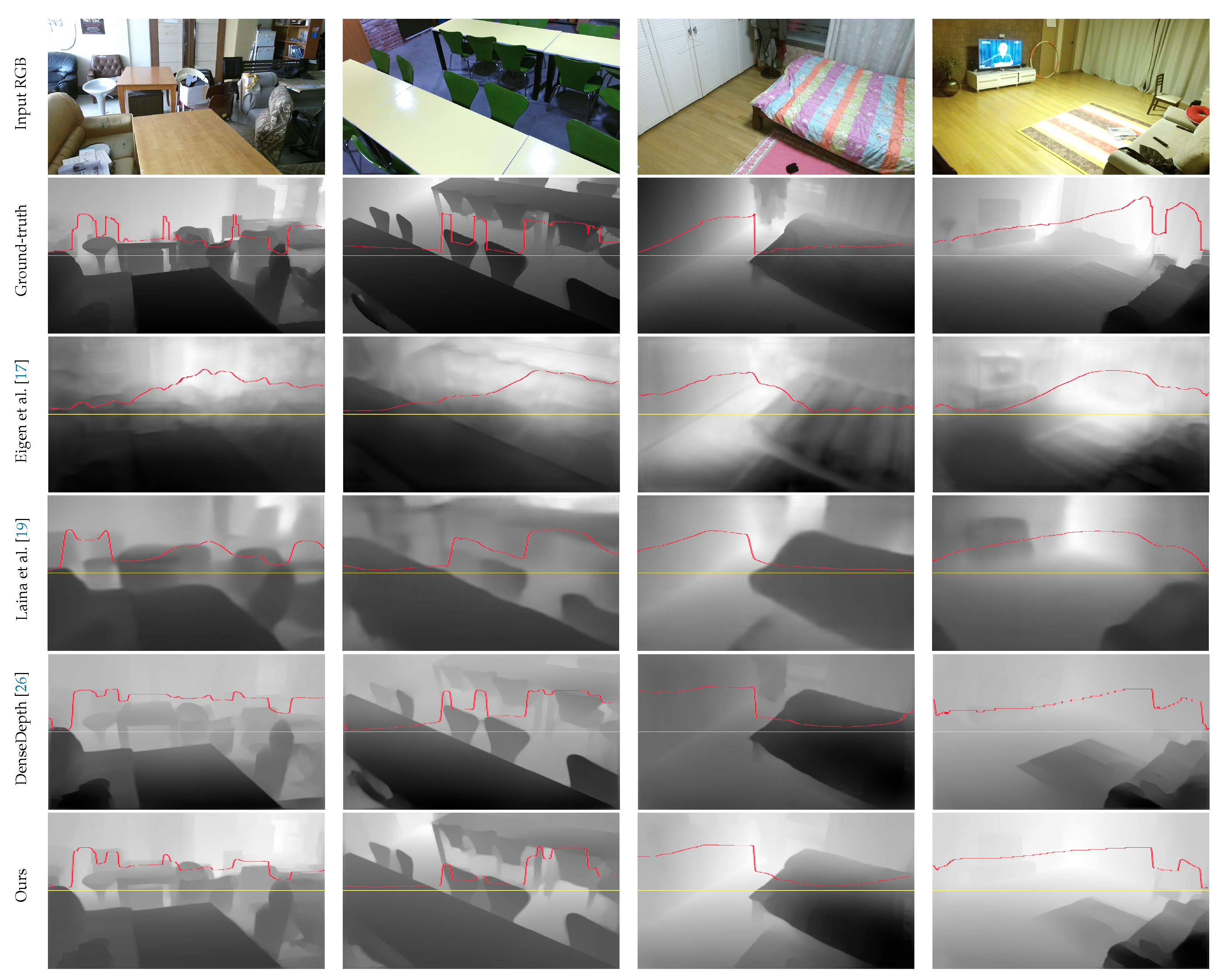
2.1. Multi-View Attention Module-Based Monocular Depth Map Estimation
2.2. Hierarchical Integral RGB-D Imaging System
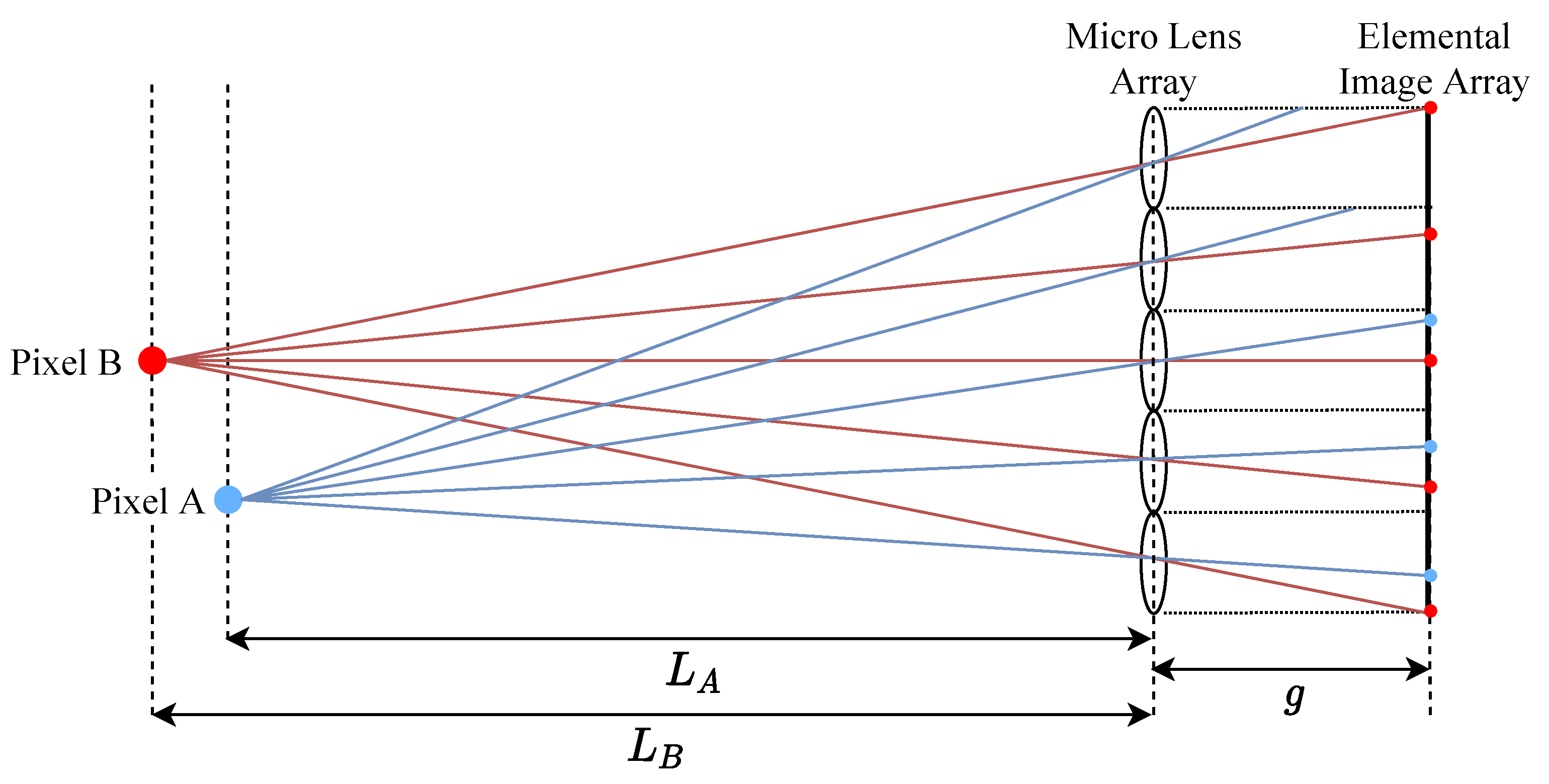
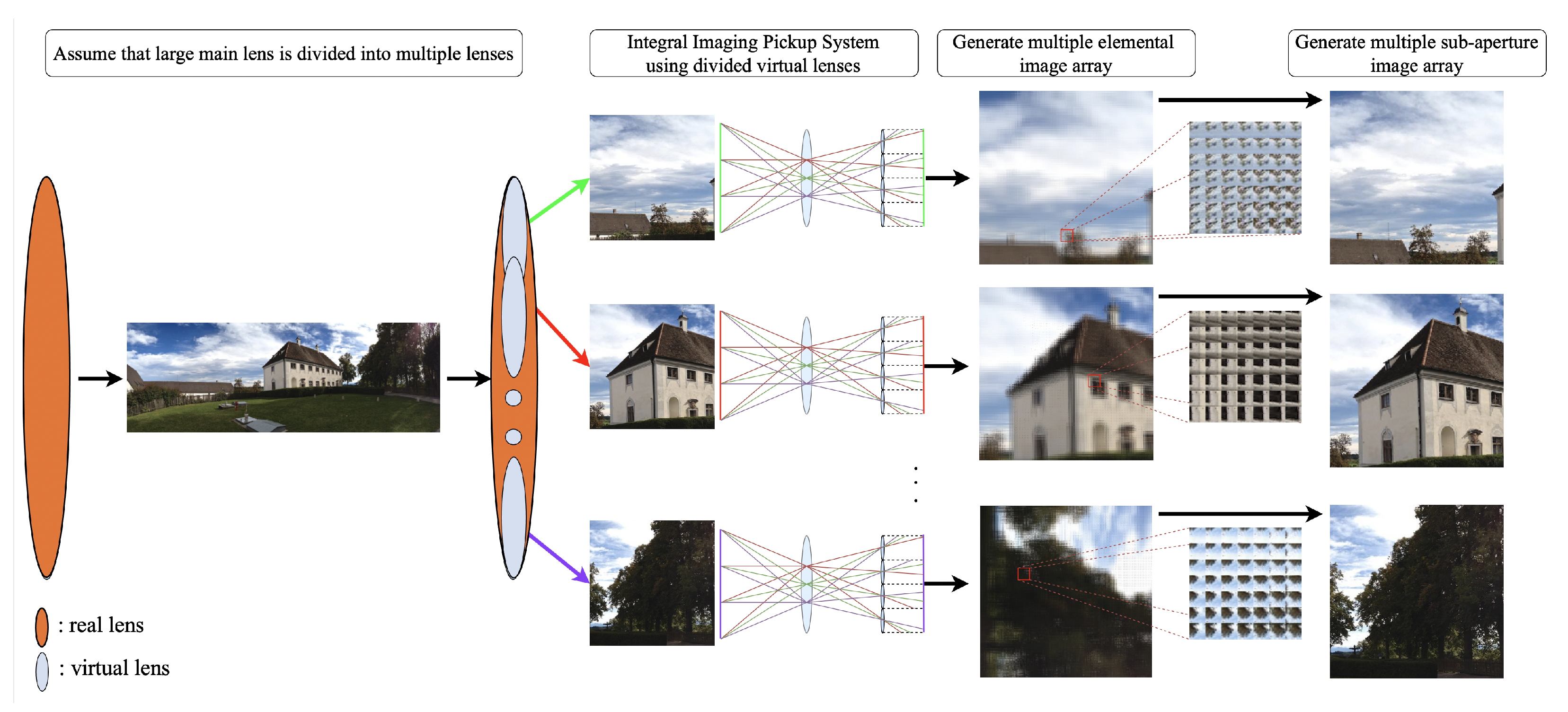
2.2.1. Multiple Shift-Lens Array Manipulation Process
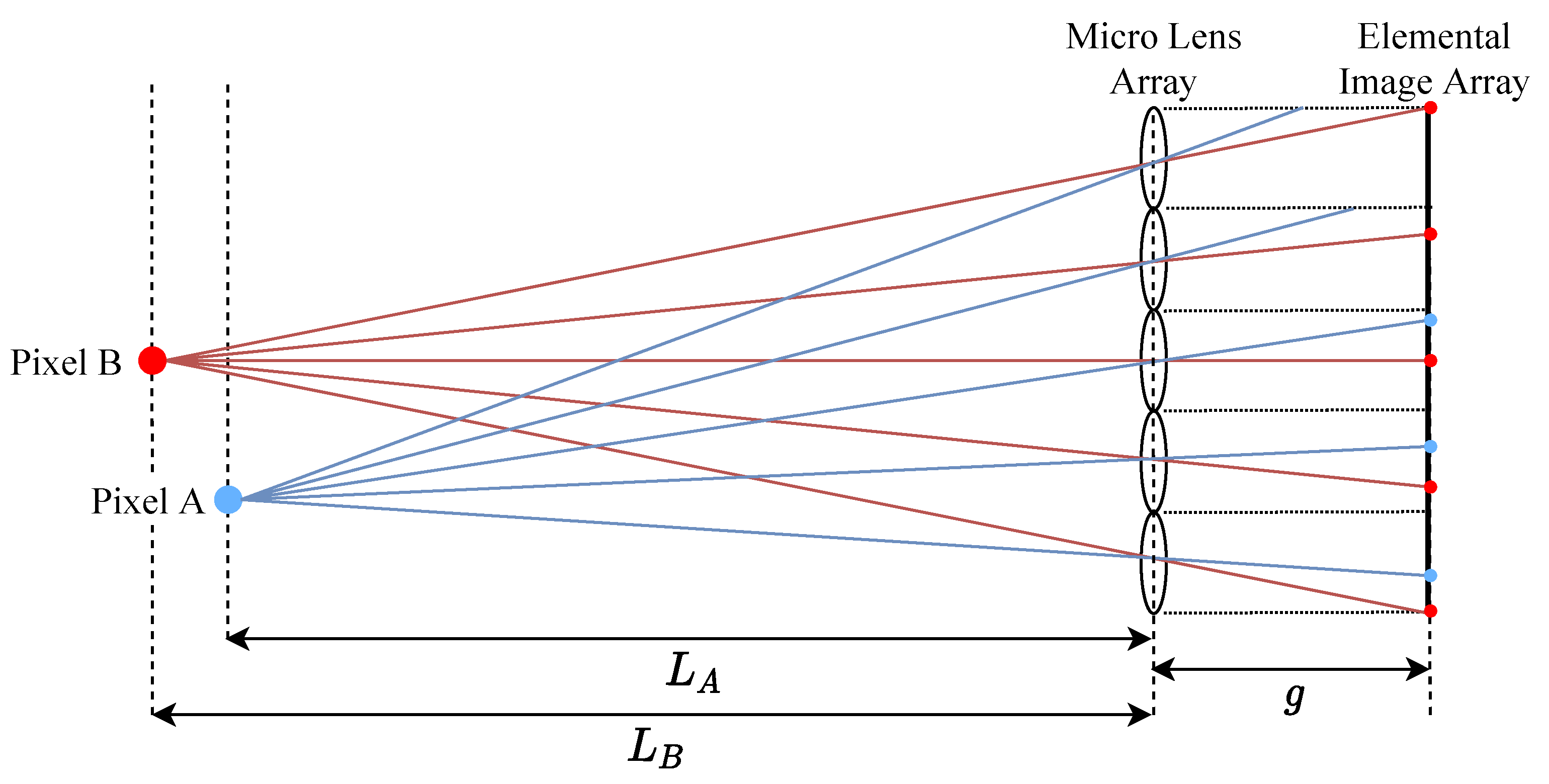
2.2.2. Sub-Integral Imaging Pickup Process
2.3. Postprocessing to Eliminate Failed Pickup Areas
| Algorithm 1 Proposed system |
Input: Inputted RGB image Monocular depth estimation network Virtual main lens Virtual micro-lens array A: Sub integral imaging pickup process function S: Convert function from elemental image array to sub-aperture image array Output: , , Large FOV sub-aperture image array about image I and depth D 1: ; 2: ▹D is a predicted depth 3: ▹I is divided into set of n 4: ▹D is divided into set of n 5: ▹M is divided into set of n 6: ▹E is divided into set of n 5: for ton do 6: if and then 7: 8: 9: 10: 11: end for 12: S 13: S 14: return |
3. Experiments
3.1. Implementation Details
3.2. Qualitative and Qualitative Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lippmann, G. Epreuves reversibles donnant la sensation du relief. J. Phys. Theor. Appl. 1908, 7, 821–825. [Google Scholar] [CrossRef]
- Xiao, X.; Javidi, B.; Martinez-Corral, M.; Stern, A. Advances in three-dimensional integral imaging: Sensing, display, and applications. Appl. Opt. 2013, 52, 546–560. [Google Scholar] [CrossRef] [PubMed]
- Okano, F.; Hoshino, H.; Arai, J.; Yuyama, I. Real-time pickup method for a three-dimensional image based on integral photography. Appl. Opt. 1997, 36, 1598–1603. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.H.; Jang, J.S.; Javidi, B. Three-dimensional volumetric object reconstruction using computational integral imaging. Opt. Express 2004, 12, 483–491. [Google Scholar] [CrossRef] [PubMed]
- Martínez-Corral, M.; Javidi, B.; Martínez-Cuenca, R.; Saavedra, G. Formation of real, orthoscopic integral images by smart pixel mapping. Opt. Express 2005, 13, 9175–9180. [Google Scholar] [CrossRef] [PubMed]
- Kwon, K.C.; Park, C.; Erdenebat, M.U.; Jeong, J.S.; Choi, J.H.; Kim, N.; Park, J.H.; Lim, Y.T.; Yoo, K.H. High speed image space parallel processing for computer-generated integral imaging system. Opt. Express 2012, 20, 732–740. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Kwon, K.C.; Shin, G.H.; Jeong, J.S.; Yoo, K.H.; Kim, N. Simplified integral imaging pickup method for real objects using a depth camera. J. Opt. Soc. Korea 2012, 16, 381–385. [Google Scholar] [CrossRef] [Green Version]
- Levoy, M.; Hanrahan, P. Light field rendering. In Proceedings of the 23rd Annual Conference on Computer Graphics and Interactive Techniques, New Orleans, LA, USA, 4–9 August 1996; pp. 31–42. [Google Scholar]
- Hahne, C. The Standard Plenoptic Camera: Applications of a Geometrical Light Field Model. Ph.D. Thesis, University of Bedfordshire, Luton, UK, 2016. [Google Scholar]
- Hahne, C.; Aggoun, A.; Velisavljevic, V.; Fiebig, S.; Pesch, M. Baseline and Triangulation Geometry in a Standard Plenoptic Camera. Int. J. Comput. Vis. 2018, 126, 21–35. [Google Scholar] [CrossRef] [Green Version]
- Silberman, N.; Hoiem, D.; Kohli, P.; Fergus, R. Indoor segmentation and support inference from rgbd images. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2012; pp. 746–760. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bertalmio, M.; Bertozzi, A.L.; Sapiro, G. Navier-Stokes, Fluid Dynamics, and Image and Video Inpainting. Proceeding of the Computer Vision and Pattern Recognition, Kauai, HI, USA, 8–14 December 2001; pp. 355–362. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Eigen, D.; Puhrsch, C.; Fergus, R. Depth map prediction from a single image using a multi-scale deep network. In Advances in Neural Information Processing Systems; MIT Press: Montreal, QC, Canada, 2014; pp. 2366–2374. [Google Scholar]
- Liu, F.; Shen, C.; Lin, G. Deep convolutional neural fields for depth estimation from a single image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 5162–5170. [Google Scholar]
- Laina, I.; Rupprecht, C.; Belagiannis, V.; Tombari, F.; Navab, N. Deeper depth prediction with fully convolutional residual networks. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 239–248. [Google Scholar]
- Cao, Y.; Wu, Z.; Shen, C. Estimating depth from monocular images as classification using deep fully convolutional residual networks. IEEE Trans. Circuits Syst. Video Technol. 2017, 28, 3174–3182. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Klein, R.; Yao, A. A two-streamed network for estimating fine-scaled depth maps from single rgb images. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 3372–3380. [Google Scholar]
- Xu, D.; Ricci, E.; Ouyang, W.; Wang, X.; Sebe, N. Multi-scale continuous crfs as sequential deep networks for monocular depth estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 5354–5362. [Google Scholar]
- Lee, J.H.; Heo, M.; Kim, K.R.; Kim, C.S. Single-image depth estimation based on fourier domain analysis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 330–339. [Google Scholar]
- Fu, H.; Gong, M.; Wang, C.; Batmanghelich, K.; Tao, D. Deep ordinal regression network for monocular depth estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2002–2011. [Google Scholar]
- Chen, Y.; Zhao, H.; Hu, Z. Attention-based context aggregation network for monocular depth estimation. arXiv 2019, arXiv:1901.10137. [Google Scholar]
- Alhashim, I.; Wonka, P. High quality monocular depth estimation via transfer learning. arXiv 2018, arXiv:1812.11941. [Google Scholar]
- Kim, Y.; Ham, B.; Oh, C.; Sohn, K. Structure selective depth superresolution for RGB-D cameras. IEEE Trans. Image Process. 2016, 25, 5227–5238. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Min, D.; Ham, B.; Kim, S.; Sohn, K. Deep stereo confidence prediction for depth estimation. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 992–996. [Google Scholar]
- Kim, Y.; Jung, H.; Min, D.; Sohn, K. Deep monocular depth estimation via integration of global and local predictions. IEEE Trans. Image Process. 2018, 27, 4131–4144. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Block Type | Output Dimension |
|---|---|---|
| Input Image | - | |
| Encoder | Block 1 | |
| Block 2 | ||
| Block 3 | ||
| Block 4 | ||
| Block 5 | ||
| Decoder | MVA Block | |
| Block 1 | ||
| Residual Block 1 | ||
| MVA Block 1 | ||
| Block 2 | ||
| Residual Block 2 | ||
| MVA Block 2 | ||
| Block 3 | ||
| Residual Block 3 | ||
| MVA Block 3 | ||
| Block 4 | ||
| Residual Block 4 | ||
| MVA Block 4 | ||
| Conv |
| Method | REL | RMSE | ||||
|---|---|---|---|---|---|---|
| Higher Is Better | Lower Is Better | |||||
| Eigen et al. [17] | − | |||||
| Liu et al. [18] | ||||||
| Laina et al. [19] | ||||||
| Cao et al. [20] | ||||||
| Li et al. [21] | ||||||
| Xu et al. [22] | ||||||
| Lee et al. [23] | − | |||||
| DORN [24] | ||||||
| Chen et al. [25] | − | |||||
| DenseDepth [26] | ||||||
| Proposed method | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, G.; Won, Y.-Y.; Yoon, S.M. Computational Large Field-of-View RGB-D Integral Imaging System. Sensors 2021, 21, 7407. https://doi.org/10.3390/s21217407
Jung G, Won Y-Y, Yoon SM. Computational Large Field-of-View RGB-D Integral Imaging System. Sensors. 2021; 21(21):7407. https://doi.org/10.3390/s21217407
Chicago/Turabian StyleJung, Geunho, Yong-Yuk Won, and Sang Min Yoon. 2021. "Computational Large Field-of-View RGB-D Integral Imaging System" Sensors 21, no. 21: 7407. https://doi.org/10.3390/s21217407
APA StyleJung, G., Won, Y.-Y., & Yoon, S. M. (2021). Computational Large Field-of-View RGB-D Integral Imaging System. Sensors, 21(21), 7407. https://doi.org/10.3390/s21217407