
A Robust Observer-Based Control Strategy for n-DOF Uncertain Robot Manipulators with Fixed-Time Stability




Abstract
:1. Introduction
- The novel fixed-time nonsingular terminal sliding mode (FxNTSM) surface was proposed to quickly obtain a fixed-time convergence of the control errors without singularity.
- To proactively deal with uncertain terms and exterior disturbances, the FxDO was developed based on a URED. The designed FxDO accurately approximated uncertain terms within a fixed time and contributed to significantly reduced chattering in the traditional SMC. In addition, the proposed FxDO removed the requirements for measuring acceleration, as presented in high-order sliding mode (HOSM) observers [26,41].
- The proposed controller had a simple design suitable for extension to actual robots. It was formed according to a combination of the fixed-time nonsingular terminal sliding mode control (FxNTSMC) method and the designed FxDO, to offer global fixed-time stability for robot manipulators. The convergence time was able to be pre-computed by setting appropriate design constants, which were bounded.
- The proposed controller obtained high tracking accuracy, small overshoot, chattering reduction, robust anti-uncertainty ability, and fast convergence of both the tracking errors and the estimation errors within fixed time.
- The proposed FxNTSMC proved definitively that it was able to obtain global stability in fixed time using the Lyapunov criteria.
2. Problem Statement, Basic Definitions, and Assumptions
2.1. Description of Robot Manipulators’ Dynamic Model
2.2. Basic Definitions and Assumptions
3. Robust Observer-Based Control Strategy for n-DOF Uncertain Robot Manipulators with Fixed-Time Stability
3.1. Proposal of the FxNTSM Surface
3.2. Design of a Fixed-Time Disturbace Observer
3.3. Design of a FxNTSMC Method
4. Illustrative Example
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alvarez-Ramirez, J.; Kelly, R.; Cervantes, I. Semiglobal stability of saturated linear PID control for robot manipulators. Automatica 2003, 39, 989–995. [Google Scholar] [CrossRef]
- Su, Y.; Müller, P.C.; Zheng, C. Global asymptotic saturated PID control for robot manipulators. IEEE Trans. Control Syst. Technol. 2009, 18, 1280–1288. [Google Scholar] [CrossRef]
- Pedram, A.; Pishkenari, H.N.; Sitti, M. Optimal controller design for 3D manipulation of buoyant magnetic microrobots via constrained linear quadratic regulation approach. J. Micro-Bio Robot. 2019, 15, 105–117. [Google Scholar] [CrossRef]
- Peng, W.; Lin, Z.; Su, J. Computed torque control-based composite nonlinear feedback controller for robot manipulators with bounded torques. IET Control Theory Appl. 2009, 3, 701–711. [Google Scholar] [CrossRef]
- Truong, T.N.; Vo, A.T.; Kang, H.-J. A backstepping global fast terminal sliding mode control for trajectory tracking control of industrial robotic manipulators. IEEE Access 2021, 9, 31921–31931. [Google Scholar] [CrossRef]
- Incremona, G.P.; Ferrara, A.; Magni, L. MPC for robot manipulators with integral sliding modes generation. IEEE/ASME Trans. Mechatronics 2017, 22, 1299–1307. [Google Scholar] [CrossRef] [Green Version]
- Utkin, V.I. Sliding mode control: Mathematical tools, design and applications. In Nonlinear and Optimal Control Theory; Springer: Berlin/Heidelberg, Germany, 2008; pp. 289–347. [Google Scholar]
- Utkin, V.I.; Poznyak, A.S. Adaptive sliding mode control. In Advances in Sliding Mode Control; Springer: Berlin/Heidelberg, Germany, 2013; pp. 21–53. [Google Scholar]
- Utkin, V. Chattering problem. IFAC Proc. Vol. 2011, 44, 13374–13379. [Google Scholar] [CrossRef]
- Van, M.; Kang, H.-J. Robust fault-tolerant control for uncertain robot manipulators based on adaptive quasi-continuous high-order sliding mode and neural network. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 1425–1446. [Google Scholar]
- Van, M.; Kang, H.-J.; Shin, K.-S. Backstepping quasi-continuous high-order sliding mode control for a Takagi--Sugeno fuzzy system with an application for a two-link robot control. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2014, 228, 1488–1500. [Google Scholar]
- Zhao, D.; Li, S.; Gao, F. A new terminal sliding mode control for robotic manipulators. Int. J. Control 2009, 82, 1804–1813. [Google Scholar] [CrossRef]
- Tuan, V.A.; Kang, H.-J. A New Finite-time Control Solution to The Robotic Manipulators Based on The Nonsingular Fast Terminal Sliding Variables and Adaptive Super-Twisting Scheme. J. Comput. Nonlinear Dyn. 2018, 14, 031002. [Google Scholar] [CrossRef]
- Zhang, L.; Su, Y.; Wang, Z. A simple non-singular terminal sliding mode control for uncertain robot manipulators. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 666–676. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H. An Adaptive Terminal Sliding Mode Control for Robot Manipulators with Non-singular Terminal Sliding Surface Variables. IEEE Access 2018, 7, 8701–8712. [Google Scholar] [CrossRef]
- Baek, J.; Kwon, W.; Kang, C. A new widely and stably adaptive sliding-mode control with nonsingular terminal sliding variable for robot manipulators. IEEE Access 2020, 8, 43443–43454. [Google Scholar] [CrossRef]
- Doan, Q.V.; Vo, A.T.; Le, T.D.; Kang, H.-J.; Nguyen, N.H.A. A novel fast terminal sliding mode tracking control methodology for robot manipulators. Appl. Sci. 2020, 10, 3010. [Google Scholar] [CrossRef]
- Mobayen, S. Adaptive global terminal sliding mode control scheme with improved dynamic surface for uncertain nonlinear systems. Int. J. Control Autom. Syst. 2018, 16, 1692–1700. [Google Scholar] [CrossRef]
- Yu, S.; Guo, G.; Ma, Z.; Du, J. Global fast terminal sliding mode control for robotic manipulators. Int. J. Model. Identif. Control 2006, 1, 72–79. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.-J. A novel fault-tolerant control method for robot manipulators based on non-singular fast terminal sliding mode control and disturbance observer. IEEE Access 2020, 8, 109388–109400. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.-J. An Adaptive Neural Non-Singular Fast-Terminal Sliding-Mode Control for Industrial Robotic Manipulators. Appl. Sci. 2018, 8, 2562. [Google Scholar] [CrossRef] [Green Version]
- Gambhire, S.J.; Kanth, K.S.S.; Malvatkar, G.M.; Londhe, P.S. Robust fast finite-time sliding mode control for industrial robot manipulators. Int. J. Dyn. Control 2019, 7, 607–618. [Google Scholar] [CrossRef]
- Kumar, N. Finite time control scheme for robot manipulators using fast terminal sliding mode control and RBFNN. Int. J. Dyn. Control 2019, 7, 758–766. [Google Scholar]
- Pan, H.; Zhang, G. Adaptive Fast Nonsingular Fixed-Time Tracking Control for Robot Manipulators. Complexity 2021, 2021. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Y.; Hou, Y.; Li, H. Fixed-time sliding mode control for uncertain robot manipulators. IEEE Access 2019, 7, 149750–149763. [Google Scholar] [CrossRef]
- Pan, H.; Zhang, G.; Ouyang, H.; Mei, L. Novel Fixed-Time Nonsingular Fast Terminal Sliding Mode Control for Second-Order Uncertain Systems Based on Adaptive Disturbance Observer. IEEE Access 2020, 8, 126615–126627. [Google Scholar] [CrossRef]
- Van, M.; Ceglarek, D. Robust fault tolerant control of robot manipulators with global fixed-time convergence. J. Franklin Inst. 2021, 358, 699–722. [Google Scholar] [CrossRef]
- Van, M.; Franciosa, P.; Ceglarek, D. Fault diagnosis and fault-tolerant control of uncertain robot manipulators using high-order sliding mode. Math. Probl. Eng. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Le, Q.D.; Kang, H.-J. Implementation of Fault-Tolerant Control for a Robot Manipulator Based on Synchronous Sliding Mode Control. Appl. Sci. 2020, 10, 2534. [Google Scholar] [CrossRef] [Green Version]
- Ullah, H.; Malik, F.M.; Raza, A.; Mazhar, N.; Khan, R.; Saeed, A.; Ahmad, I. Robust Output Feedback Control of Single-Link Flexible-Joint Robot Manipulator with Matched Disturbances Using High Gain Observer. Sensors 2021, 21, 3252. [Google Scholar] [CrossRef]
- Nguyen, V.-C.; Vo, A.-T.; Kang, H.-J. A non-singular fast terminal sliding mode control based on third-order sliding mode observer for a class of second-order uncertain nonlinear systems and its application to robot manipulators. IEEE Access 2020, 8, 78109–78120. [Google Scholar] [CrossRef]
- Xie, L.; Soh, Y.C. Robust Kalman filtering for uncertain systems. Syst. Control Lett. 1994, 22, 123–129. [Google Scholar] [CrossRef]
- Moheimani, S.O.R.; Savkin, A.V.; Petersen, I.R. Robust filtering, prediction, smoothing, and observability of uncertain systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1998, 45, 446–457. [Google Scholar] [CrossRef] [Green Version]
- Yang, G.-H.; Wang, J.L. Robust nonfragile Kalman filtering for uncertain linear systems with estimator gain uncertainty. IEEE Trans. Automat. Contr. 2001, 46, 343–348. [Google Scholar] [CrossRef]
- Cao, P.; Gan, Y.; Dai, X. Finite-time disturbance observer for robotic manipulators. Sensors 2019, 19, 1943. [Google Scholar] [CrossRef] [Green Version]
- Vo, A.T.; Truong, T.N.; Kang, H.-J. A Novel Tracking Control Algorithm With Finite-Time Disturbance Observer for a Class of Second-Order Nonlinear Systems and its Applications. IEEE Access 2021, 9, 31373–31389. [Google Scholar] [CrossRef]
- Nguyen, V.-C.; Vo, A.-T.; Kang, H.-J. A finite-time fault-tolerant control using non-singular fast terminal sliding mode control and third-order sliding mode observer for robotic manipulators. IEEE Access 2021, 9, 31225–31235. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Cruz-Zavala, E.; Moreno, J.A.; Fridman, L.M. Uniform robust exact differentiator. IEEE Trans. Automat. Contr. 2011, 56, 2727–2733. [Google Scholar] [CrossRef]
- Angulo, M.T.; Moreno, J.A.; Fridman, L. Robust exact uniformly convergent arbitrary order differentiator. Automatica 2013, 49, 2489–2495. [Google Scholar] [CrossRef]
- Chang, J.; Cieslak, J.; Zolghadri, A.; Dávila, J.; Zhou, J. Design of sliding mode observers for quadrotor pitch/roll angle estimation via IMU measurements. In Proceedings of the 2015 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Cancun, Mexico, 23–25 November 2015; pp. 393–400. [Google Scholar]
- Van, M.; Ge, S.S.; Ren, H. Finite time fault tolerant control for robot manipulators using time delay estimation and continuous nonsingular fast terminal sliding mode control. IEEE Trans. Cybern. 2017, 47, 1681–1693. [Google Scholar] [CrossRef]
- Tran, X.-T.; Oh, H. Prescribed performance adaptive finite-time control for uncertain horizontal platform systems. ISA Trans. 2020. [Google Scholar] [CrossRef]
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 3/E; Prentice Hall: Hoboken, NJ, USA, 2009. [Google Scholar]
- Armstrong, B.; Khatib, O.; Burdick, J. The explicit dynamic model and inertial parameters of the PUMA 560 arm. In Proceedings of the 1986 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 7–10 April 1986; Volume 3, pp. 510–518. [Google Scholar]
- Yu, X.; Zhihong, M. Fast terminal sliding-mode control design for nonlinear dynamical systems. Circuits Syst. I Fundam. Theory 2002, 49, 261–264. [Google Scholar] [CrossRef]
- Pan, H.; Zhang, G.; Ouyang, H.; Mei, L. A novel global fast terminal sliding mode control scheme for second-order systems. IEEE Access 2020, 8, 22758–22769. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| the real -dimensional space | |
| the set of positive real numbers | |
| the set of by real matrices | |
| given vector or matrix | |
| the transpose of | |
| absolute value of | |
| Euclidean norm of | |
| vector of joint angular position, | |
| vector of joint angular velocity, | |
| vector of joint angular acceleration, | |
| positive–definite and symmetric matrix of inertia parameters, | |
| estimated part of | |
| uncertain dynamic part of | |
| matrix of the Coriolis and centripetal forces, | |
| estimated part of | |
| uncertain dynamic part of | |
| vectors of the gravitational force, | |
| estimated part of | |
| uncertain dynamic part of | |
| vectors of the friction force, | |
| vector of the control input torque, | |
| unknown time-varying external disturbance, | |
| lumped nominal part of the robot | |
| a smooth function | |
| lumped unknown uncertainty | |
| desired trajectory, the first and second derivative of under varying time, | |
| vector of control errors, | |
| control errors, the first and second derivative of under time-varying, . is the time derivative of | |
| vector of FxNTSM surface, | |
| positive constants | |
| Euler’s number | |
| Root-mean-square error |
| Description | Symbol | Value | Unit |
|---|---|---|---|
| Mass of each link | |||
| Length of link | |||
| Center of mass | |||
| Inertia | kg·m2 | ||
| kg·m2 | |||
| kg·m2 |
| Control Method | Control Parameter |
|---|---|
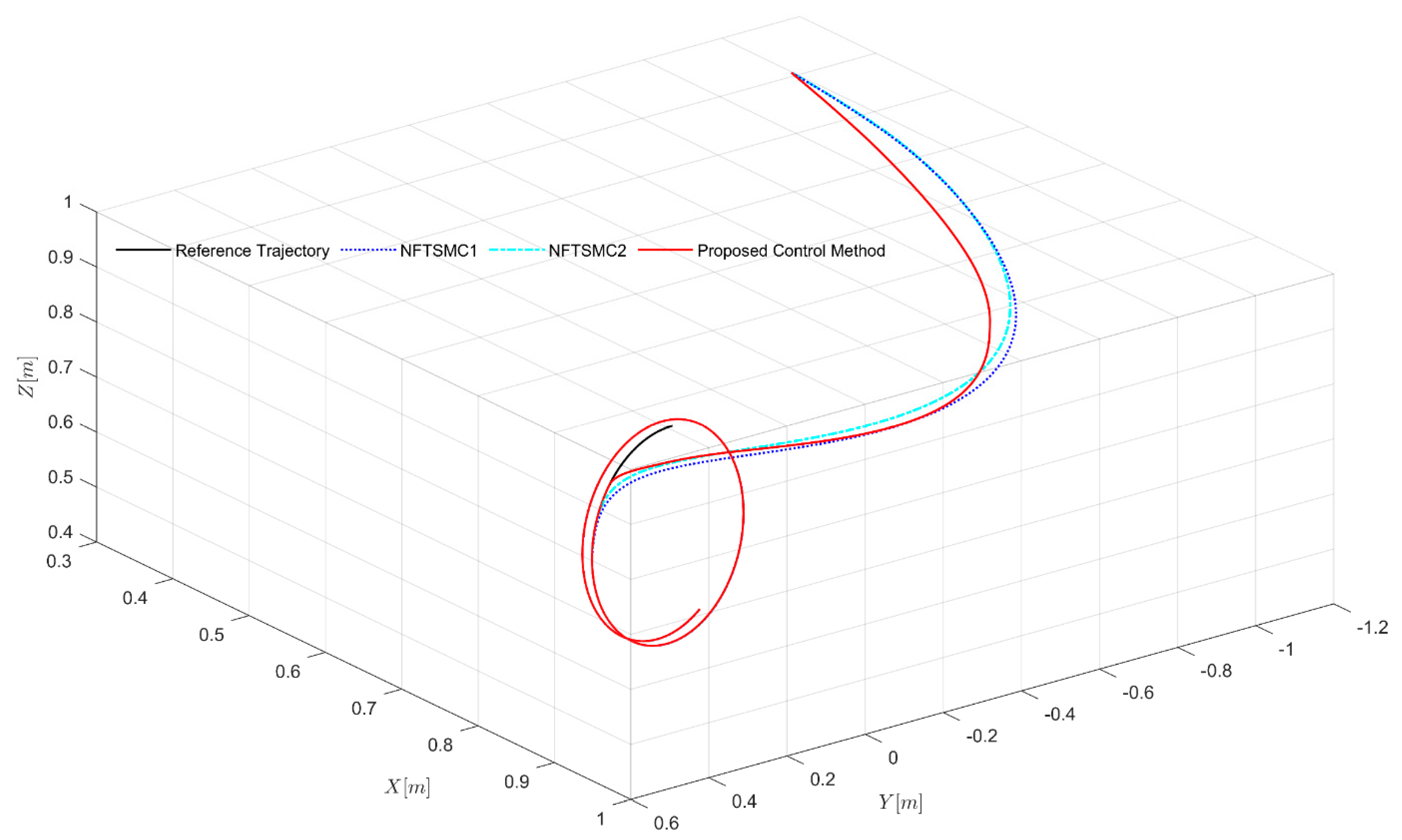
| NFTSMC1 | |
| NFTSMC2 | |
| Proposed FxNTSMC | |
| Control Method | Root-Mean-Square Errors from the 2nd s to the 20th s | |||||
|---|---|---|---|---|---|---|
| NFTSMC1 | ||||||
| NFTSMC2 | ||||||
| Proposed FxNTSMC | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vo, A.T.; Truong, T.N.; Kang, H.-J.; Van, M. A Robust Observer-Based Control Strategy for n-DOF Uncertain Robot Manipulators with Fixed-Time Stability. Sensors 2021, 21, 7084. https://doi.org/10.3390/s21217084
Vo AT, Truong TN, Kang H-J, Van M. A Robust Observer-Based Control Strategy for n-DOF Uncertain Robot Manipulators with Fixed-Time Stability. Sensors. 2021; 21(21):7084. https://doi.org/10.3390/s21217084
Chicago/Turabian StyleVo, Anh Tuan, Thanh Nguyen Truong, Hee-Jun Kang, and Mien Van. 2021. "A Robust Observer-Based Control Strategy for n-DOF Uncertain Robot Manipulators with Fixed-Time Stability" Sensors 21, no. 21: 7084. https://doi.org/10.3390/s21217084
APA StyleVo, A. T., Truong, T. N., Kang, H.-J., & Van, M. (2021). A Robust Observer-Based Control Strategy for n-DOF Uncertain Robot Manipulators with Fixed-Time Stability. Sensors, 21(21), 7084. https://doi.org/10.3390/s21217084