
Multi-Ship Control and Collision Avoidance Using MPC and RBF-Based Trajectory Predictions



Abstract
:1. Introduction
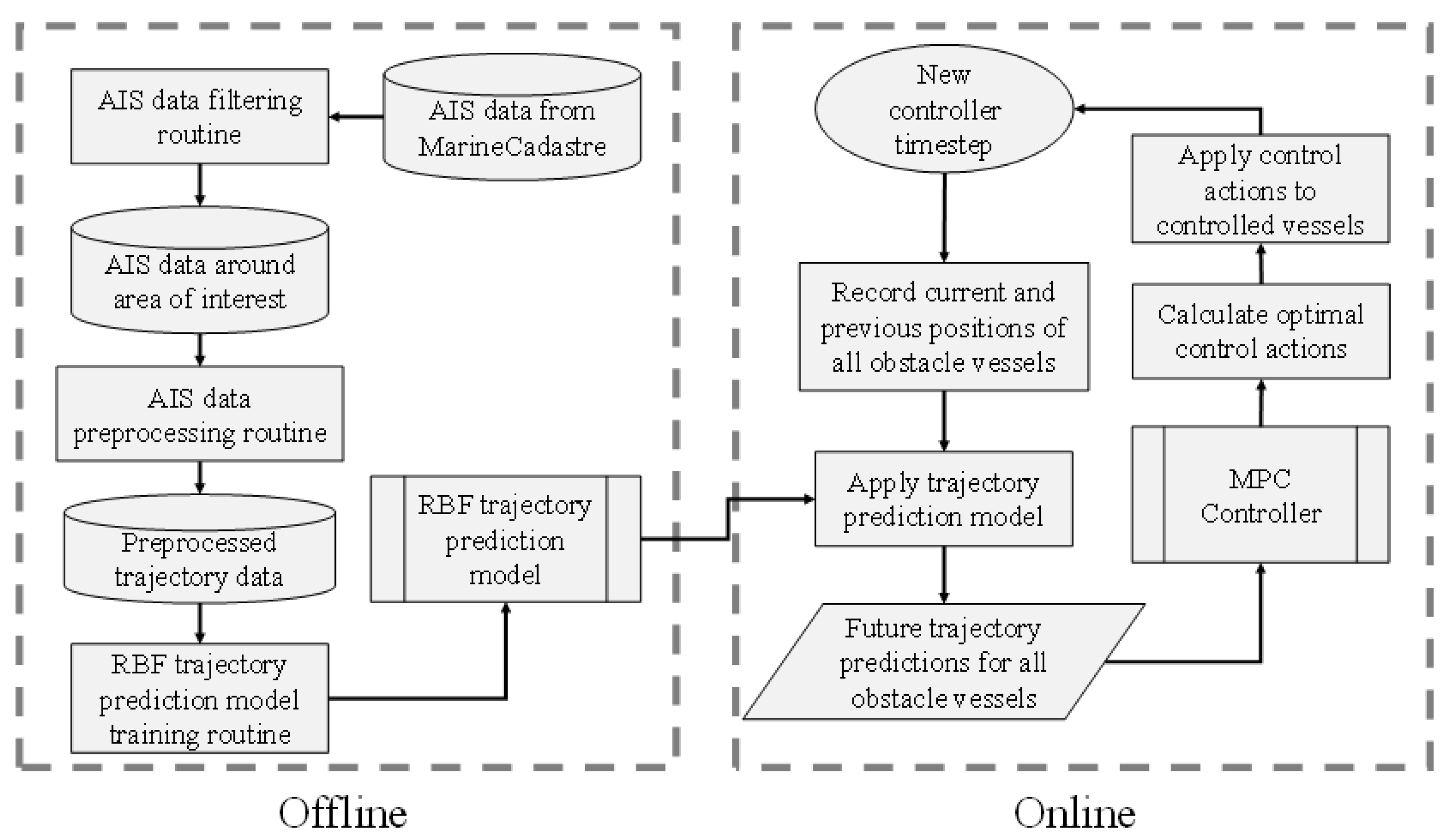
2. AIS-Data-Based Trajectory Prediction Models
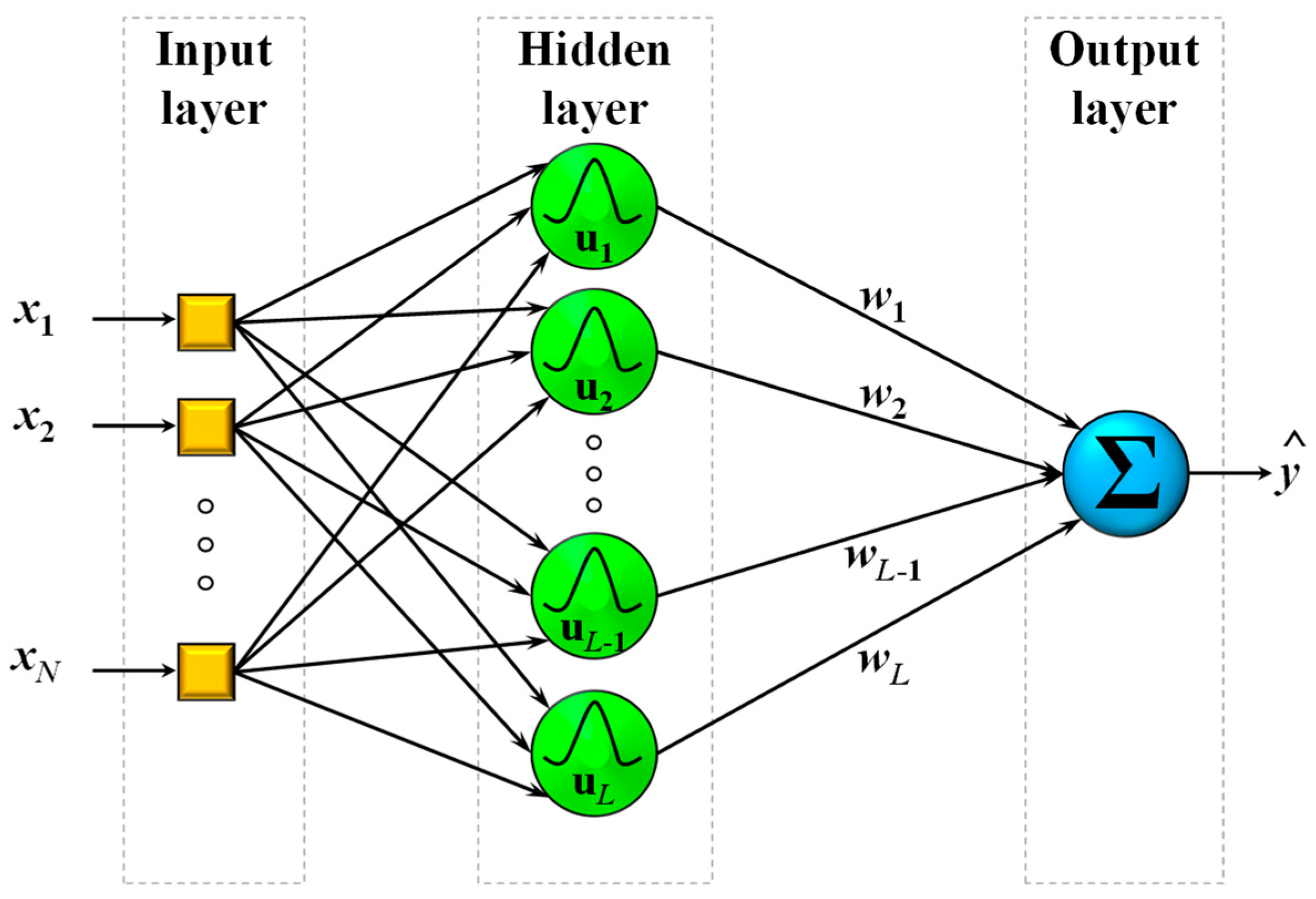
2.1. Radial Basis Function Neural Networks
2.2. The Fuzzy Means (Fm) Training Algorithm
2.3. Data Preprocessing
| Algorithm 1 Preprocessing Stage |
| 1: Process each entry in the common dataset so that it contains only the following: Vessel ID, timestamp, latitude, and longitude. Reject all other information. |
| 2: Sort dataset by vessel ID and sort each vessel data by date. |
| 3: Apply resampling and outlier filtering on the data of each vessel to achieve a resampling of 120 s. |
| 4: Split vessel data into trajectories containing ten consecutive vessel positions each. |
| 5: Create final preprocessed dataset, which should contain the vessel ID and final 10-position trajectories. |
2.4. Modeling Procedures
| Algorithm 2 Modeling Stage |
| 1: Load final preprocessed dataset. |
| , so that each trajectory sample is in the form . |
| 3: Randomly permute the trajectory samples of each vessel. |
| 4: Split the trajectory samples of each vessel into training, validation, and testing subsets (in this work a 50%–5%–25% percentage split is used). Do this so that all vessels contribute to all three subsets according to the chosen splitting. |
| 5: Merge all subset samples, e.g., all training samples of all vessels together in one single dataset that will be used for training. Do the same for the validation and testing subsets. |
| 6: Normalize the inputs and outputs of the training subset. Apply the normalization coefficients to the validation and testing subsets. |
| − values as inputs and the last set of − values as output. |
| 8: Final model is in the form of Equation (11). |
3. MPC for Multi-Ship Collision Avoidance
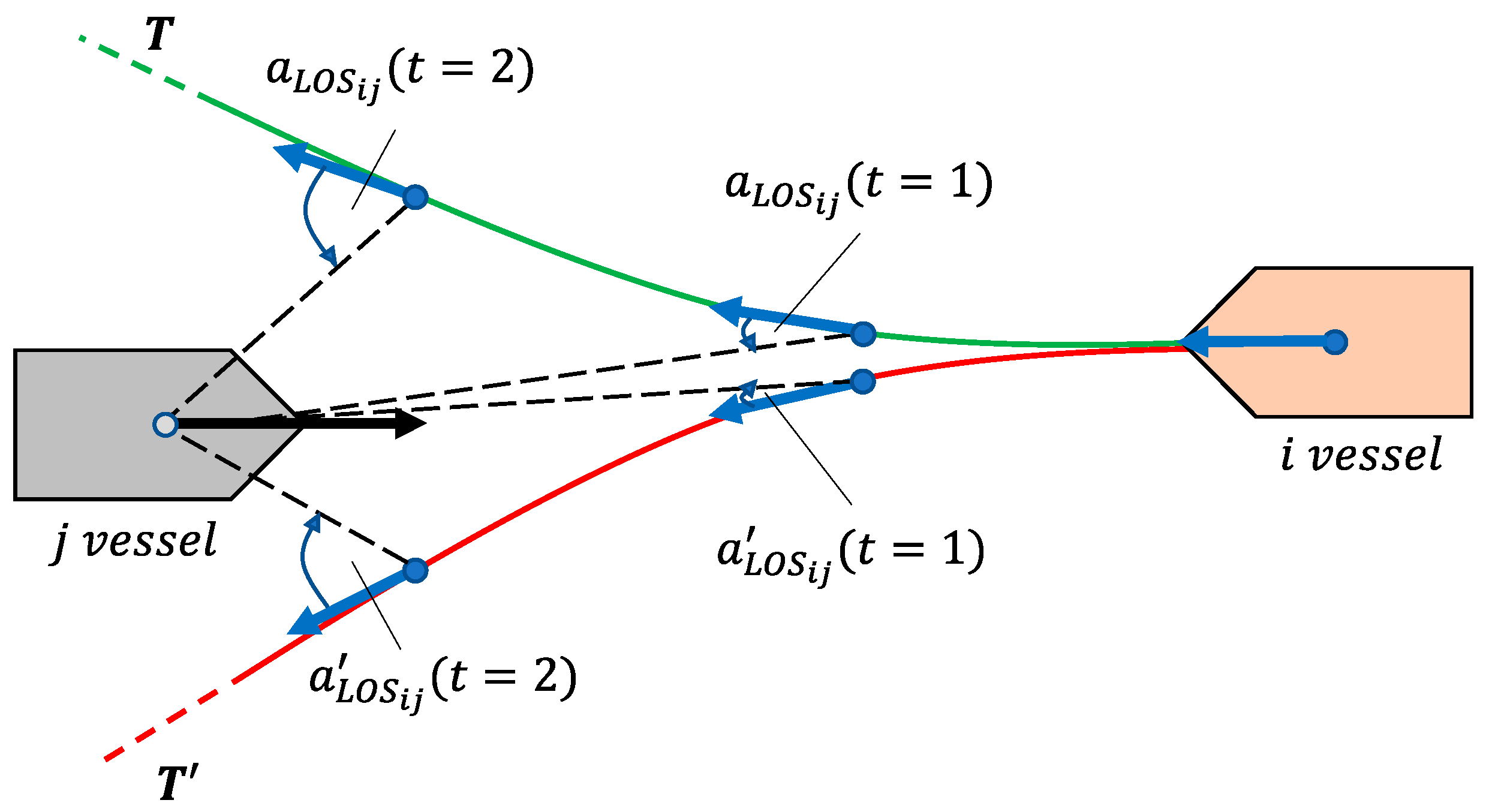
3.1. Preliminaries on Maritime Collision Avoidance and Trajectory Generation
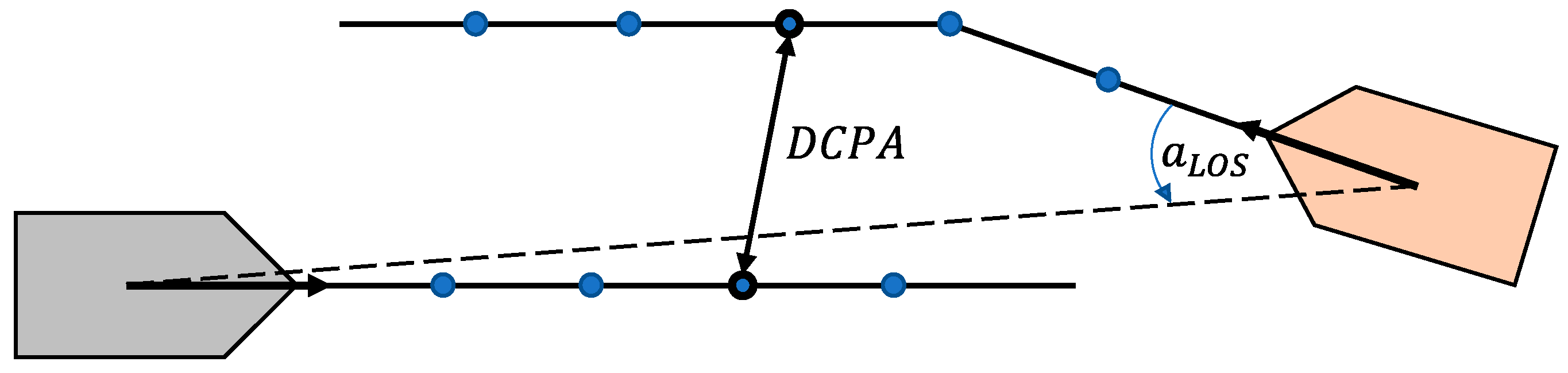
3.2. Collision Avoidance with Mpc and Obstacle Trajectory Prediction Models
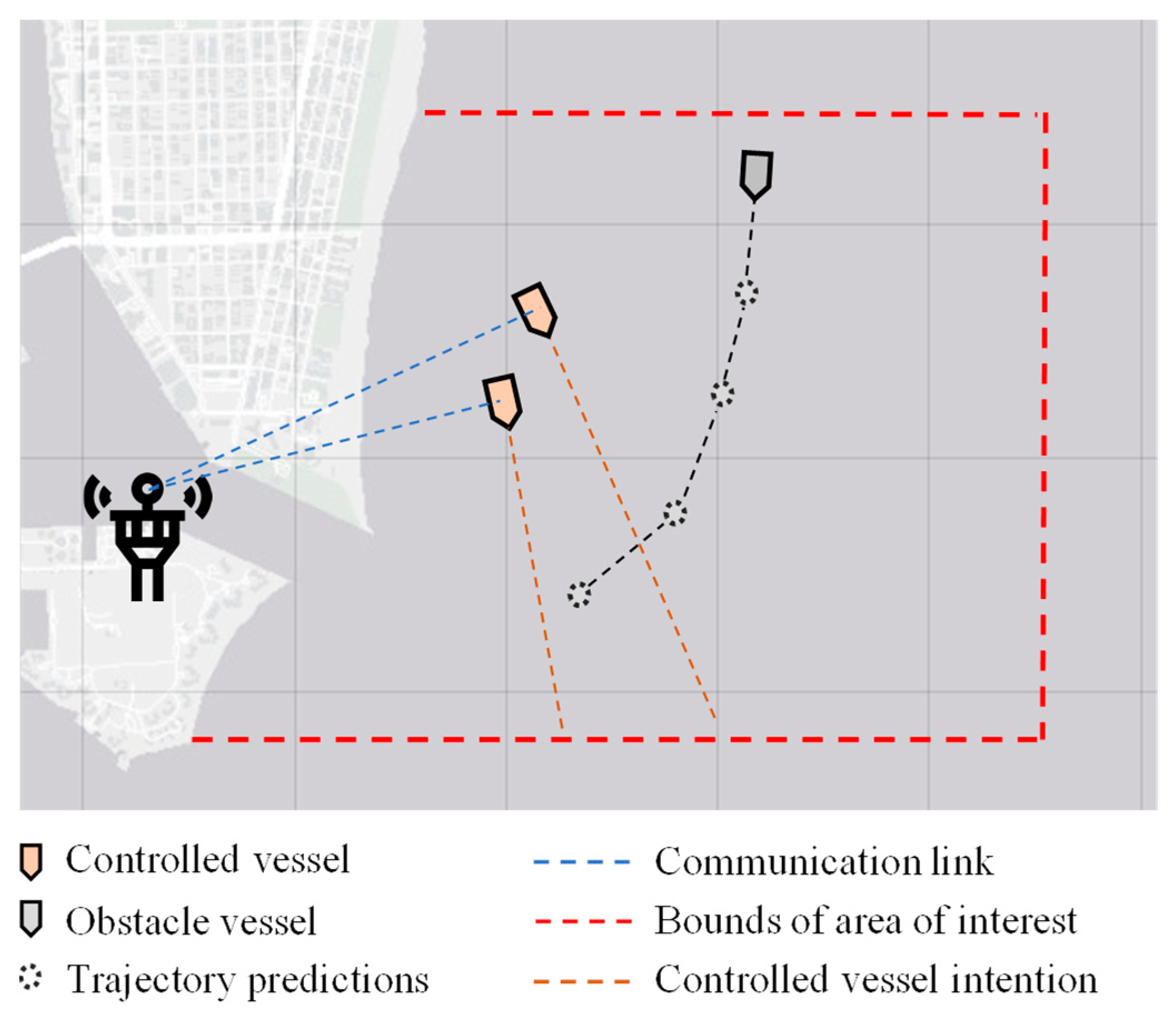
3.3. Control Framework
4. Case Study
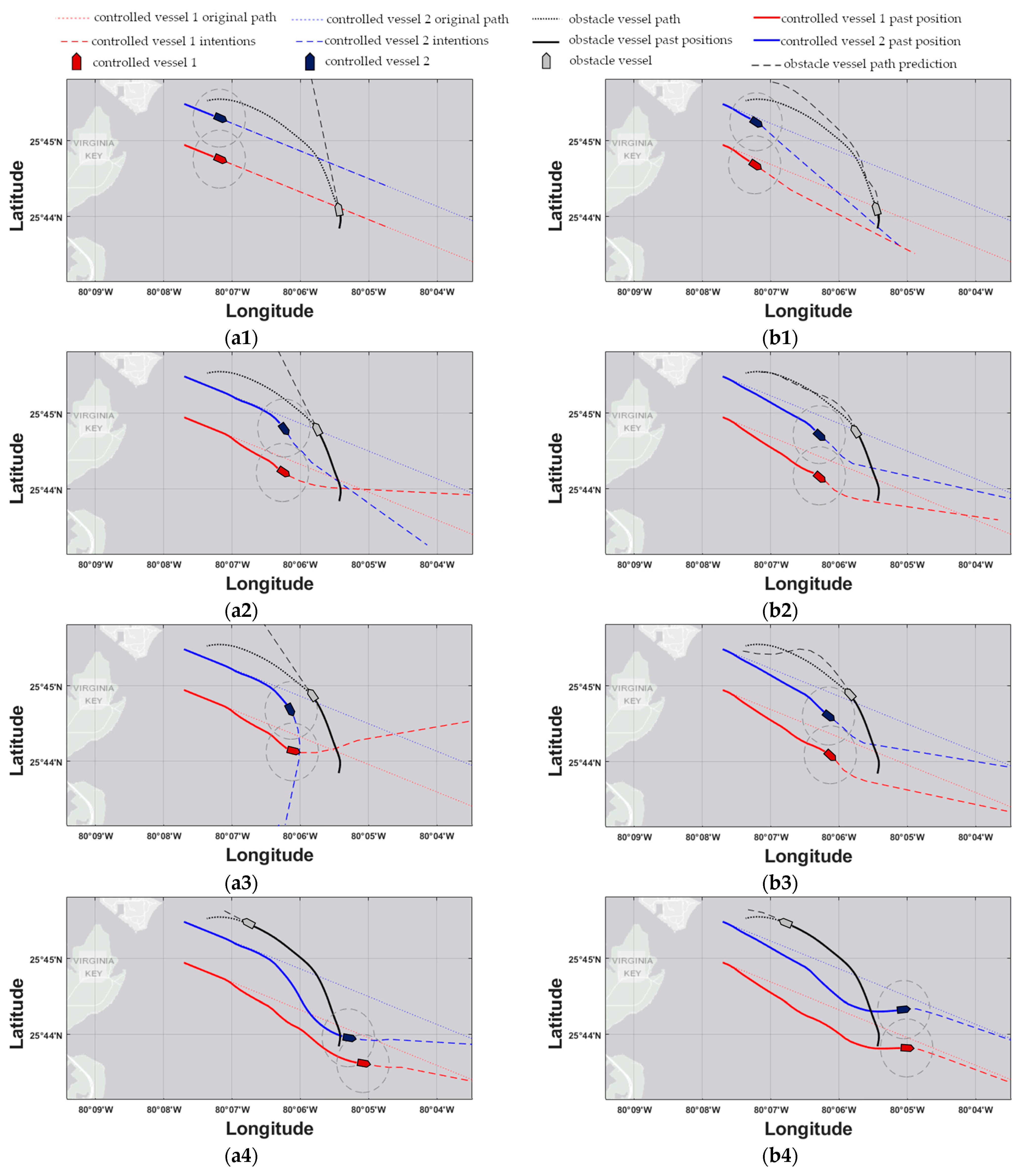
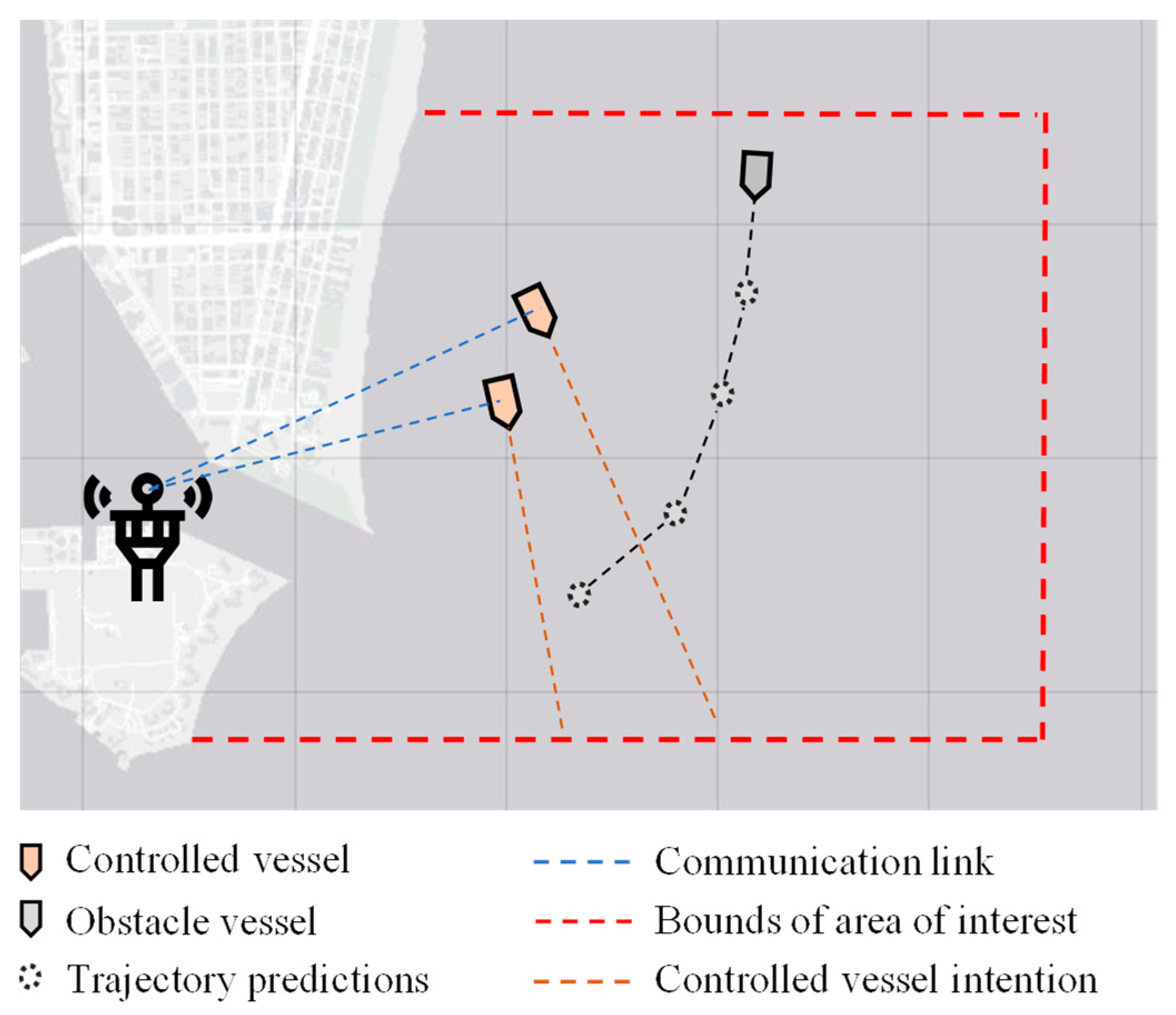
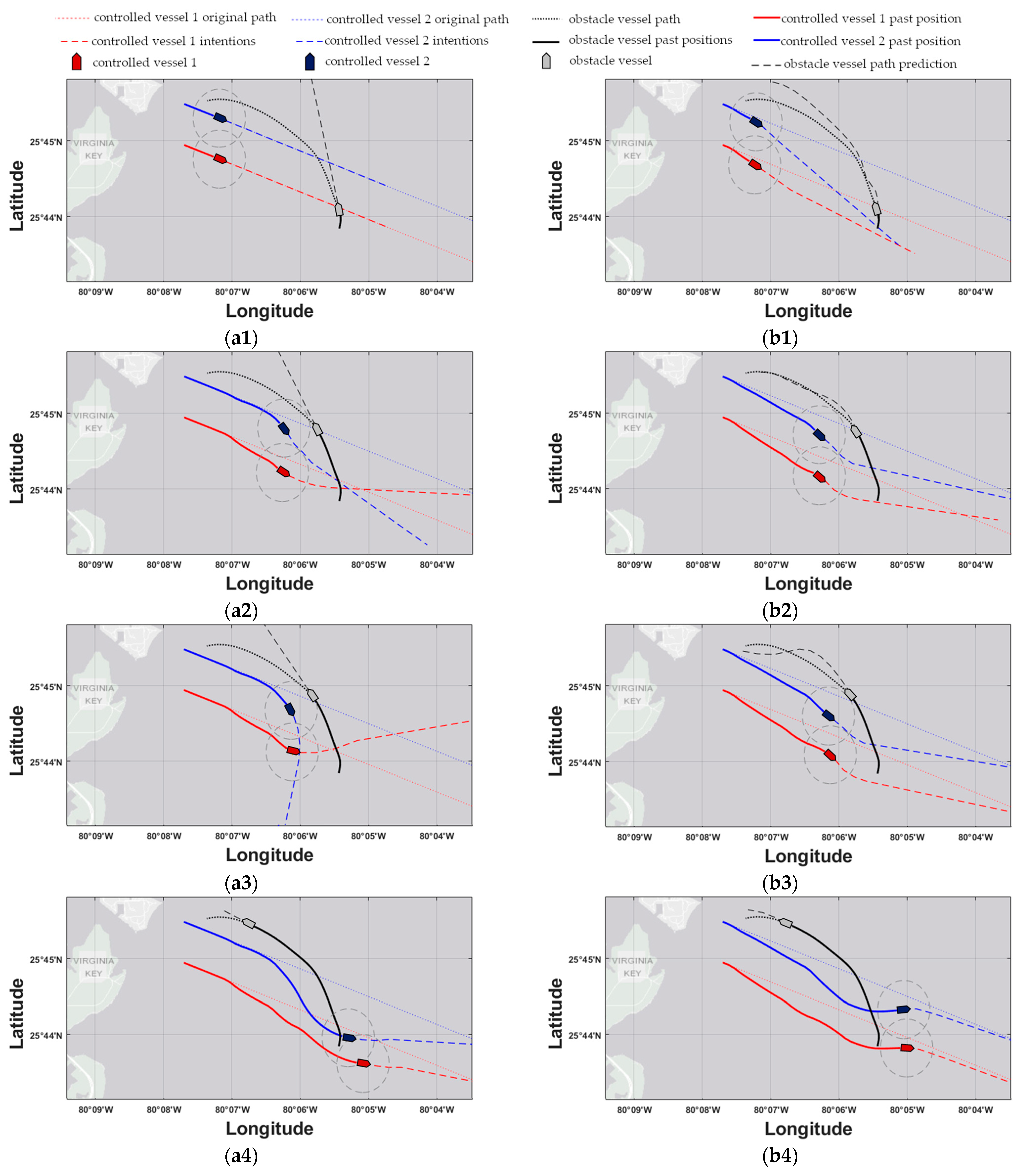
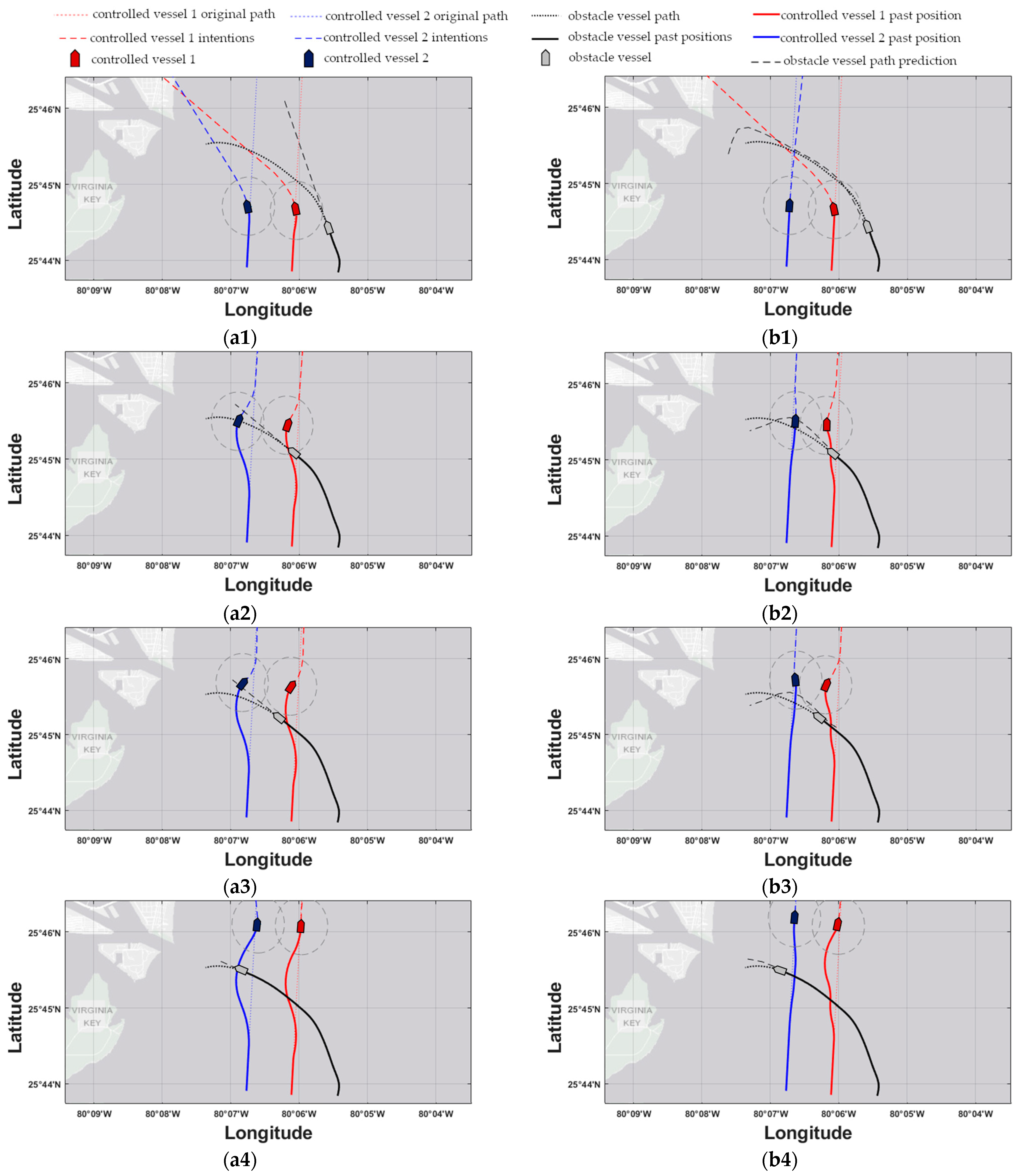
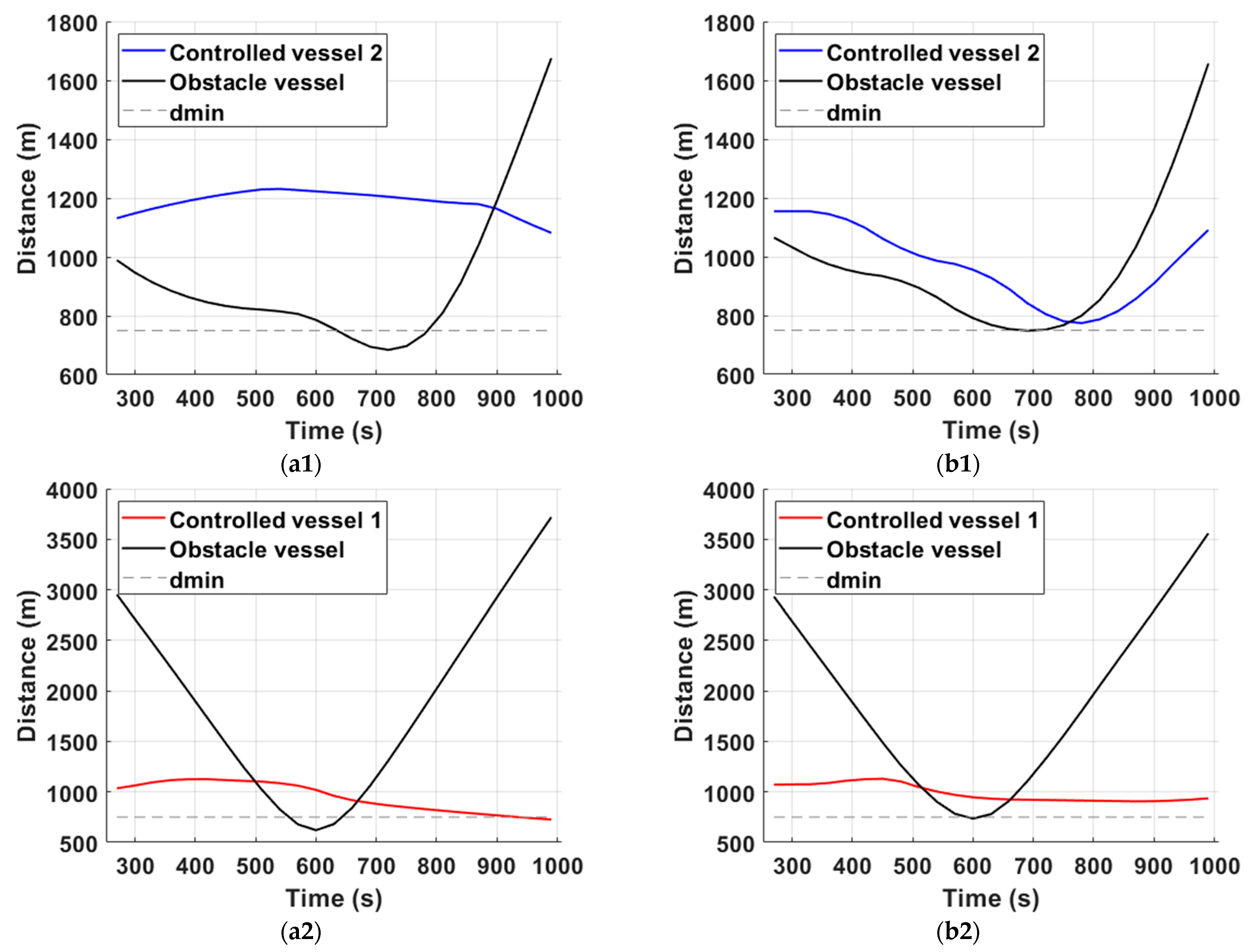
4.1. Multi-Ship Collision Avoidance Control for the Miami Port
4.2. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zaman, M.B.; Kobayashi, E.; Wakabayashi, N.; Khanfir, S.; Pitana, T.; Maimun, A. Fuzzy FMEA model for risk evaluation of ship collisions in the Malacca Strait: Based on AIS data. J. Simul. 2014, 8, 91–104. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, D.; Yan, X.; Haugen, S.; Guedes Soares, C. A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs. Ocean Eng. 2015, 105, 336–348. [Google Scholar] [CrossRef]
- Puisa, R.; Lin, L.; Bolbot, V.; Vassalos, D. Unravelling causal factors of maritime incidents and accidents. Saf. Sci. 2018, 110, 124–141. [Google Scholar] [CrossRef] [Green Version]
- IMO COLREG. Convention on the International Regulations for Preventing Collisions at Sea, 1972; IMO: London, UK, 2003. [Google Scholar]
- Hu, L.; Naeem, W.; Rajabally, E.; Watson, G.; Mills, T.; Bhuiyan, Z.; Raeburn, C.; Salter, I.; Pekcan, C. A multiobjective optimization approach for COLREGs-Compliant path planning of autonomous surface vehicles verified on networked bridge simulators. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1167–1179. [Google Scholar] [CrossRef] [Green Version]
- Perera, L.P.; Carvalho, J.P.; Guedes Soares, C. Intelligent ocean navigation and fuzzy-Bayesian decision/action formulation. IEEE J. Ocean. Eng. 2012, 37, 204–219. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Chui, K.T.; Liu, R.W. A Real-Time Collision Avoidance Framework of MASS Based on B-Spline and Optimal Decoupling Control. Sensors 2021, 21, 4911. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Wu, Q.; Zhang, J.; Wu, B.; Wang, Y. Autonomous decision-making scheme for multi-ship collision avoidance with iterative observation and inference. Ocean Eng. 2020, 197, 106873. [Google Scholar] [CrossRef]
- Johansen, T.A.; Perez, T.; Cristofaro, A. Ship collision avoidance and COLREGS compliance using simulation-based control behavior selection with predictive hazard assessment. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3407–3422. [Google Scholar] [CrossRef] [Green Version]
- Aguiar, A.P.; Pascoal, A.M. Dynamic positioning and way-point tracking of underactuated AUVs in the presence of ocean currents. Int. J. Control 2007, 80, 1092–1108. [Google Scholar] [CrossRef]
- Caldwell, C.; Dunlap, D.; Collins, E. Motion planning for an autonomous Underwater Vehicle via Sampling Based Model Predictive Control. In Proceedings of the Oceans 2010 MTS/IEEE Seattle, Seattle, WA, USA, 20–23 September 2010; Volume 670–671, pp. 1370–1377. [Google Scholar]
- Taherian, S.; Halder, K.; Dixit, S.; Fallah, S. Autonomous Collision Avoidance Using MPC with LQR-Based Weight Transformation. Sensors 2021, 21, 4296. [Google Scholar] [CrossRef]
- Xie, S.; Garofano, V.; Chu, X.; Negenborn, R.R. Model predictive ship collision avoidance based on Q-learning beetle swarm antenna search and neural networks. Ocean Eng. 2019, 193, 106609. [Google Scholar] [CrossRef]
- Chen, L.; Hopman, H.; Negenborn, R.R. Distributed model predictive control for vessel train formations of cooperative multi-vessel systems. Transp. Res. Part C Emerg. Technol. 2018, 92, 101–118. [Google Scholar] [CrossRef]
- Zheng, H.; Negenborn, R.R.; Lodewijks, G. Robust Distributed Predictive Control of Waterborne AGVs-A Cooperative and Cost-Effective Approach. IEEE Trans. Cybern. 2018, 48, 2449–2461. [Google Scholar] [CrossRef]
- Von Ellenrieder, K.D. Stable Backstepping Control of Marine Vehicles with Actuator Rate Limits and Saturation ⁎. IFAC-PapersOnLine 2018, 51, 262–267. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks: A Comprehensive Foundation, 3rd ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1999; Volume 13, ISBN 0131471392. [Google Scholar]
- Zhou, H.; Chen, Y.; Zhang, S. Ship Trajectory Prediction Based on BP Neural Network. J. Artif. Intell. 2019, 1, 29–36. [Google Scholar] [CrossRef]
- Xu, T.; Liu, X.; Yang, X. Ship trajectory online prediction based on BP neural network algorithm. In Proceedings of the Proceedings-2011 International Conference of Information Technology, Computer Engineering and Management Sciences, ICM 2011, Penang, MY, USA, 13–14 June 2011; Volume 1, pp. 103–106. [Google Scholar]
- Ma, S.; Liu, S.; Meng, X. Optimized BP neural network algorithm for predicting ship trajectory. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference, ITNEC 2020, Chongqing, China, 12–14 June 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 525–532. [Google Scholar]
- Liu, X.; He, W.; Xie, J.; Chu, X. Predicting the Trajectories of Vessels Using Machine Learning. In Proceedings of the 2020 5th International Conference on Control, Robotics and Cybernetics, CRC 2020, Wuhan, China, 16–18 October 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 66–70. [Google Scholar]
- Li, W.; Zhang, C.; Ma, J.; Jia, C. Long-term vessel motion predication by modeling trajectory patterns with AIS data. In Proceedings of the ICTIS 2019-5th International Conference on Transportation Information and Safety, Liverpool, UK, 14–17 July 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019; pp. 1389–1394. [Google Scholar]
- Ding, M.; Su, W.; Liu, Y.; Zhang, J.; Li, J.; Wu, J. A Novel Approach on Vessel Trajectory Prediction Based on Variational LSTM. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Computer Applications, ICAICA 2020, Dalian, China, 27–29 June 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 206–211. [Google Scholar]
- Tampakis, P.; Chondrodima, E.; Pikrakis, A.; Theodoridis, Y.; Pristouris, K.; Nakos, H.; Petra, E.; Dalamagas, T.; Kandiros, A.; Markakis, G.; et al. Sea Area Monitoring and Analysis of Fishing Vessels Activity: The i4sea Big Data Platform. In Proceedings of the Proceedings-IEEE International Conference on Mobile Data Management, Versailles, France, 30 June–3 July 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 275–280. [Google Scholar]
- Forti, N.; Millefiori, L.M.; Braca, P.; Willett, P. Prediction oof Vessel Trajectories from AIS Data Via Sequence-To-Sequence Recurrent Neural Networks. In Proceedings of the ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing-Proceedings, Barcelona, Spain, 4–8 May 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 8936–8940. [Google Scholar]
- Wang, C.; Ren, H.; Li, H. Vessel trajectory prediction based on AIS data and bidirectional GRU. In Proceedings of the Proceedings-2020 International Conference on Computer Vision, Image and Deep Learning, CVIDL 2020, Chongqing, China, 1–12 July 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 260–264. [Google Scholar]
- Tritsarolis, A.; Chondrodima, E.; Tampakis, P.; Pikrakis, A. Online Co-movement Pattern Prediction in Mobility Data. arXiv 2021, arXiv:2102.08870. [Google Scholar]
- Zhu, G.; Du, J.; Kao, Y. Robust adaptive neural trajectory tracking control of surface vessels under input and output constraints. J. Frankl. Inst. 2020, 357, 8591–8610. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, C.; Wei, Y.; Wang, J. Robust trajectory tracking control for underactuated autonomous surface vessels with uncertainty dynamics and unavailable velocities. Ocean Eng. 2020, 218, 108099. [Google Scholar] [CrossRef]
- Li, C.; Zhao, Y.; Wang, G.; Fan, Y.; Bai, Y. Adaptive RBF neural network control for unmanned surface vessel course tracking. In Proceedings of the 6th International Conference on Information Science and Technology, ICIST 2016, Dalian, China, 6–8 May 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 285–290. [Google Scholar]
- Stogiannos, M.; Papadimitrakis, M.; Sarimveis, H.; Alexandridis, A. Vessel Trajectory Prediction Using Radial Basis Function Neural Networks. In Proceedings of the 2021 IEEE 19th International Conference on Smart Technologies (EUROCON), Lviv, Ukraine, 6–8 July 2021. [Google Scholar]
- Alexandridis, A.; Stogiannos, M.; Papaioannou, N.; Zois, E.; Sarimveis, H. An inverse neural controller based on the applicability domain of RBF network models. Sensors 2018, 18, 315. [Google Scholar] [CrossRef] [Green Version]
- Yang, Q.; Ye, Z.; Li, X.; Wei, D.; Chen, S.; Li, Z. Prediction of flight status of logistics uavs based on an information entropy radial basis function neural network. Sensors 2021, 21, 3651. [Google Scholar] [CrossRef]
- Bhartiya, S.; Whiteley, J.R. Factorized approach to nonlinear MPC using a radial basis function model. AIChE J. 2001, 47, 358–368. [Google Scholar] [CrossRef]
- Alexandridis, A.; Sarimveis, H.; Ninos, K. A Radial Basis Function network training algorithm using a non-symmetric partition of the input space-Application to a Model Predictive Control configuration. Adv. Eng. Softw. 2011, 42, 830–837. [Google Scholar] [CrossRef]
- Stogiannos, M.; Alexandridis, A.; Sarimveis, H. Model predictive control for systems with fast dynamics using inverse neural models. ISA Trans. 2018, 72, 161–177. [Google Scholar] [CrossRef] [PubMed]
- Han, H.G.; Wu, X.L.; Qiao, J.F. Real-time model predictive control using a self-organizing neural network. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1425–1436. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Gao, H.; Qiu, J. A Combined Adaptive Neural Network and Nonlinear Model Predictive Control for Multirate Networked Industrial Process Control. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 416–425. [Google Scholar] [CrossRef] [PubMed]
- Alexandridis, A.; Chondrodima, E.; Giannopoulos, N.; Sarimveis, H. A fast and efficient method for training categorical radial basis function networks. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2831–2836. [Google Scholar] [CrossRef] [PubMed]
- Karamichailidou, D.; Kaloutsa, V.; Alexandridis, A. Wind turbine power curve modeling using radial basis function neural networks and tabu search. Renew. Energy 2021, 163, 2137–2152. [Google Scholar] [CrossRef]
- Tu, E.; Zhang, G.; Rachmawati, L.; Rajabally, E.; Huang, G. Bin Exploiting AIS Data for Intelligent Maritime Navigation: A Comprehensive Survey from Data to Methodology. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1559–1582. [Google Scholar] [CrossRef]
- Last, P.; Bahlke, C.; Hering-Bertram, M.; Linsen, L. Comprehensive Analysis of Automatic Identification System (AIS) Data in Regard to Vessel Movement Prediction. J. Navig. 2014, 67, 791–809. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Meng, Q.; Xiao, Z.; Fu, X. A novel ship trajectory reconstruction approach using AIS data. Ocean Eng. 2018, 159, 165–174. [Google Scholar] [CrossRef]
- Fu, P.; Wang, H.; Liu, K.; Hu, X.; Zhang, H. Finding Abnormal Vessel Trajectories Using Feature Learning. IEEE Access 2017, 5, 7898–7909. [Google Scholar] [CrossRef]
- Emmens, T.; Amrit, C.; Abdi, A.; Ghosh, M. The promises and perils of Automatic Identification System data. Expert Syst. Appl. 2021, 178, 114975. [Google Scholar] [CrossRef]
- Akima, H. A Method of Bivariate Interpolation and Smooth Surface Fitting Based on Local Procedures. Commun. ACM 1974, 17, 18–20. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, X.; Chen, X.; Sang, L.; Zhang, D. A novel approach for assistance with anti-collision decision making based on the International Regulations for Preventing Collisions at Sea. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2012, 226, 250–259. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: Chichester, UK, 2011; ISBN 9781119991496. [Google Scholar]
- Zheng, H.; Negenborn, R.R.; Lodewijks, G. Trajectory Tracking of Autonomous Vessels Using Model Predictive Control; IFAC: Cape Town, South Africa, 2014; Volume 19, ISBN 9783902823625. [Google Scholar]
- Zhu, M.; Hahn, A.; Wen, Y.Q.; Bolles, A. Identification-based simplified model of large container ships using support vector machines and artificial bee colony algorithm. Appl. Ocean Res. 2017, 68, 249–261. [Google Scholar] [CrossRef]
- Byrd, R.H.; Gilbert, J.C.; Nocedal, J. A trust region method based on interior point techniques for nonlinear programming. Math. Program. Ser. B 2000, 89, 149–185. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RBF NN | ||
|---|---|---|
| Latitude (y) | Longitude (x) | |
| Mean RMSE (deg) | 1439∙10−6 | 1567∙10−6 |
| Best combined RBF models | ||
| Mean RMSHFD (m) | 1200 | |
| Parameter | Description | Value |
|---|---|---|
| Controller sample time | 1′ | |
| Control horizon | 5 | |
| Prediction horizon | 15 | |
| Risk function scaling parameter | 3 | |
| Risk term weighting parameter | 1 | |
| Course deviation term weighting parameter | 0.05 | |
| Control action smoothness term weighting parameter | 5 |
| Parameter | Description | Value |
|---|---|---|
| Minimum allowable DCPA for risk calculation | 750 m | |
| Emergency distance | 200 m | |
| Minimum allowable TCPA for risk calculation | 10′ | |
| Rudder gain constant | 0.5 | |
| Rudder time constant | 2 |
| Scenario 1 | Scenario 2 | ||||
|---|---|---|---|---|---|
| s | Controlled Vessel | MPC-RBFP | MPC-SLP | MPC-RBFP | MPC-SLP |
| Course deviations (1) | 1 | 1.31·104 | 2.21·104 | 0.658·104 | 0.521·104 |
| 2 | 1.49·104 | 2.85·104 | 0.404·104 | 0.529·104 | |
| Control action smoothness (2) | 1 | 307.35 | 476.59 | 242.12 | 167.85 |
| 2 | 290.94 | 424.43 | 92.47 | 128.41 | |
| Risk of trajectory (3) | 1 | 0 | 4.032·106 | 0 | 0 |
| 2 | 0 | 0 | 0 | 3.949·106 | |
| Cost of trajectory (4) | 1 | 9.05·106 | 1.62·1013 | 2.63·106 | 1.49·106 |
| 2 | 2.63·106 | 4.15·107 | 8.58·105 | 1.55·1013 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papadimitrakis, M.; Stogiannos, M.; Sarimveis, H.; Alexandridis, A. Multi-Ship Control and Collision Avoidance Using MPC and RBF-Based Trajectory Predictions. Sensors 2021, 21, 6959. https://doi.org/10.3390/s21216959
Papadimitrakis M, Stogiannos M, Sarimveis H, Alexandridis A. Multi-Ship Control and Collision Avoidance Using MPC and RBF-Based Trajectory Predictions. Sensors. 2021; 21(21):6959. https://doi.org/10.3390/s21216959
Chicago/Turabian StylePapadimitrakis, Myron, Marios Stogiannos, Haralambos Sarimveis, and Alex Alexandridis. 2021. "Multi-Ship Control and Collision Avoidance Using MPC and RBF-Based Trajectory Predictions" Sensors 21, no. 21: 6959. https://doi.org/10.3390/s21216959
APA StylePapadimitrakis, M., Stogiannos, M., Sarimveis, H., & Alexandridis, A. (2021). Multi-Ship Control and Collision Avoidance Using MPC and RBF-Based Trajectory Predictions. Sensors, 21(21), 6959. https://doi.org/10.3390/s21216959